EP1069277B1 - Sonnenschutzanlage mit automatischer Behangsteuerung und manueller Eingriffsmöglichkeit - Google Patents
Sonnenschutzanlage mit automatischer Behangsteuerung und manueller Eingriffsmöglichkeit Download PDFInfo
- Publication number
- EP1069277B1 EP1069277B1 EP00114879A EP00114879A EP1069277B1 EP 1069277 B1 EP1069277 B1 EP 1069277B1 EP 00114879 A EP00114879 A EP 00114879A EP 00114879 A EP00114879 A EP 00114879A EP 1069277 B1 EP1069277 B1 EP 1069277B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- blind
- setting
- manual
- protecting arrangement
- input
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 230000007704 transition Effects 0.000 claims description 4
- 230000004075 alteration Effects 0.000 claims 1
- 230000006870 function Effects 0.000 abstract description 3
- 230000037072 sun protection Effects 0.000 description 18
- 230000006978 adaptation Effects 0.000 description 10
- 239000013598 vector Substances 0.000 description 10
- 230000008859 change Effects 0.000 description 6
- 238000001514 detection method Methods 0.000 description 6
- 239000000523 sample Substances 0.000 description 5
- 230000001133 acceleration Effects 0.000 description 4
- 230000003044 adaptive effect Effects 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000005291 magnetic effect Effects 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000006399 behavior Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 241000446313 Lamella Species 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 230000005294 ferromagnetic effect Effects 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- QSHDDOUJBYECFT-UHFFFAOYSA-N mercury Chemical compound [Hg] QSHDDOUJBYECFT-UHFFFAOYSA-N 0.000 description 1
- 229910052753 mercury Inorganic materials 0.000 description 1
- 230000008447 perception Effects 0.000 description 1
- 238000001556 precipitation Methods 0.000 description 1
- 230000008672 reprogramming Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000011524 similarity measure Methods 0.000 description 1
- 230000000475 sunscreen effect Effects 0.000 description 1
- 239000000516 sunscreening agent Substances 0.000 description 1
Images


Classifications
-
- E—FIXED CONSTRUCTIONS
- E06—DOORS, WINDOWS, SHUTTERS, OR ROLLER BLINDS IN GENERAL; LADDERS
- E06B—FIXED OR MOVABLE CLOSURES FOR OPENINGS IN BUILDINGS, VEHICLES, FENCES OR LIKE ENCLOSURES IN GENERAL, e.g. DOORS, WINDOWS, BLINDS, GATES
- E06B9/00—Screening or protective devices for wall or similar openings, with or without operating or securing mechanisms; Closures of similar construction
- E06B9/56—Operating, guiding or securing devices or arrangements for roll-type closures; Spring drums; Tape drums; Counterweighting arrangements therefor
- E06B9/68—Operating devices or mechanisms, e.g. with electric drive
Definitions
- the invention relates to a sunshade system with a motor-adjustable curtain and a control that makes the adjustment of the curtain in response to at least one specific input to a predetermined basic programming to generate at least one output, with a manual intervention option for the realization of the automatic setting different Settings of the blind is provided.
- sun protection systems with an automatic control, which generate output variables based on specific input parameters, for example for controlling electric motors, by means of which the curtain is automatically adjustable according to the input parameters. While the basic programming of such systems may be done in a manner believed to be optimal, it is very difficult to discern in advance the actual lighting characteristics of a room, and the subjective perception of the people working or living in shaded areas with such systems also varies considerably can be. Although one can manage by manual intervention in the control and adjust the desired shading state, but the user must then completely dispense with the automatic adjustment of the sunshade or constantly make manual changes, which can hardly be considered an acceptable solution.
- the object of the invention is to provide a sunshade system that will better meet the user requirements without costly reprogramming.
- the object is achieved by a sunshade system of the type described above, in which the control detects manually selected settings of the blind together with at least one input present at the time of manual intervention, stores and from a certain number substantially the same, at least twice repeated manual intervention with essentially the same input variable, the basic programming for future settings has been changed if this input variable is present and the manual intervention is evaluated.
- any more or less complicated programming by the user is eliminated.
- the programming of the controller, d. H. the deviation from the given basic programming according to the user's wishes, is done solely by the manual settings made in automatic mode, which the system detects and learns from.
- control and learning algorithms used in the control have the consequence that the user manual only in the initial phase after commissioning of the sunshade Changes must be made according to his wishes and after some time, the system no longer perceives, as always prevail the desired settings.
- the controller gradually adjusts the programming with increasing number of repetitions of substantially the same manual settings at substantially the same input size of the manual setting and makes the adjusted setting of the curtain in the present input.
- the programming takes over the manual setting and repeats them when the input variable is present.
- stepwise adaptation for example, can proceed so that one or two-time manual intervention only minimal changes
- it is recommended in the second variant described assume at least three to four times repetition of the manual setting for a change of programming to sufficient statistical certainty to assume that the user's manual interventions are based on a desire to fundamentally change programming.
- the learning algorithm is designed so that the call of the adapted or adopted setting is made in a certain parameter range of the detected input variable. This prevents that it is almost impossible due to exaggerated accuracy in the detection of the input variable and the manually set output that repeats this state, since the user will always make manual adjustments with a certain spread and also the detected inputs, especially in the detection of several input quantities are unlikely to be identical again and again.
- width of the parameter range is also another way to avoid a repetition of once made manual settings by the parameter range of the input variable with increasing number of repeated manual settings is wider and, for example, a single input a repetition is made only with exactly repeated input variables ,
- the controller detects at least the input variables time of day, day of the week, date, wind speed, solar intensity and / or temperature and takes this into account when changing the setting of the blind and / or the programming change.
- not all input variables that are used by the control for setting the blind must be included in the learning processes. Basically, however, it can be assumed that with additional input variable, which is used for programming change, an improved adaptation to the user requirements by changing the programming is possible.
- a call of a matched or accepted setting takes place when all input variables are within specific parameter ranges.
- the provision is made via an interpolated adjustment curve, which can be determined by the controller based on the output and approaching end setting of the curtain.
- the interpolated adjustment curves can be used to avoid sudden adjustment processes that are perceived as very disturbing by the persons present in the room shaded by the sun shading system. Particularly pleasant Verstell characterizingen arise when the provision is made sigmoidal, the sigmoidal transitions are realized by Bézier curves. Such return curves have only one turning point and thus give a perceived as particularly soft and pleasant change in lighting during the adjustment.
- the sunshade system can be switched to a purely manual control, for example, to be able to permanently set a desired Behang too in case of system errors.
- the controller is switchable to a state in which further manual settings cause no change in the basic programming. For example, if a room used by other people in the meantime, they could manipulate the programming of the actual user by repeated manual intervention, so that the actual user would then "reprogram" his sunscreen system again.
- the control described is basically used in all types of sun protection systems, wherein the setting of the curtain by varying at least one output variable, for example, the Behangbone, the Behangneist or the slat inclination occurs in external venetian blinds.
- the output variables may be, for example, the control signals of electric motors.
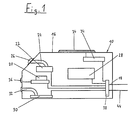
- FIG. 1 shows a sensor system 10 for determining active input variables for controlling a sunshade system 12 (see FIG. 2), which are transmitted to a controller 14 (see FIGS. 2 and 3) which, when defined switching values are reached, send drive commands to the drives 17 (see Fig. 3) of the sun protection system 12 transmitted and thus allows automatic adjustment of the sun protection system 12.
- the sensor system 10 shown in Fig. 1 is housed in a separate housing 16 which is coupled by means of connecting lines 18 to the controller 14.
- the sensor 10 must determine at least the input variables time / date, sun intensity and direction of the sunshade system to allow automatic control of the sunshade system 12 depending on the position of the sun. Especially with external sun protection systems, the detection of the additional input variables wind speed and outside temperature by the sensor 10 and a rain detector are useful.
- the sensor 10 has a radio receiver 20 which receives electromagnetic radio clock signals and forwards the calculation of the current position of the sun to the controller 14.
- the radio receiver 20 is of course formed with a suitable antenna (not shown), which ensures safe data reception location-independent within the transmission range. The determination of the day of the week and the summer time correction can be realized programmatically in the controller 14.
- the senor 10 may also have a clock that provides the required input variables.
- a clock that provides the required input variables.
- the determination of the input time time / date based on the radio clock principle provides a nearly perfect accuracy and the possibility of automatic initial and Nacheinstellens.
- the determination of the input sun intensity takes place with the aid of a sun sensor 22, which is designed as a photoresistor, photodiode or solar cell. It is also conceivable to provide a plurality of such sensors - also of different types - for determining the solar intensity.
- the sun sensor 22 is arranged in the illustrated embodiment directly on the board of the evaluation system within the sensor housing 16 and connected via a light guide 24 with a seated on the housing outer wall lens 26.
- the photosensitive element itself mount the outside of the housing and connect to the board using electrical cables.
- the sun sensor provides the controller 14 with information as to whether the sunshade system 14 or the window surface to be shaded by it is exposed to solar radiation at all, or whether, for example due to clouding, an extension of the sunshade system is necessary at all.
- the sun sensor 22 can also detect, for example, reflected sunlight from an opposite facade and cause an extension of the sunshade at a time of day, to which the controller actually assumes that the affected facade is in the shade.
- a direction sensor 28 is provided, which automatically detects the orientation of the sunshade 12 after installation, which of course assumes in the separately executed in Fig. 1 housing 16 of the sensor 10 that This is located in a well-defined location for sun protection.
- the direction sensor 28 in its embodiment as an electronic compass, can measure two or three axes of the final magnetic field and calculate the absolute direction from the individual components of the magnetic field. For most applications, the measurement of the two horizontal components is sufficient, since the sun protection system and thus the direction sensor 28 are aligned exactly during assembly using a spirit level. It is important to ensure that ferromagnetic components of the sun protection system, such. B.
- the electronic compass 28 may be embodied, for example, as a fluxgate sensor or as a magnetoresistive sensor.
- the senor 10 offers the possibility with the aid of a wind sensor 30 to detect the input variable wind speed and thus avoid a risk of the system by mechanical overload by causing the retraction of the system in strong wind.
- cup anemometer can be used as the wind sensor, but this can only detect the hoizontal components of the upcoming wind up to a deviation of approximately 15 ° from the horizontal.
- the input variable wind speed is given too low, in pure upwind or fall winds such tray crossanimometers can detect no wind movement.
- cup crossanimometers require a relatively large amount of space.
- a pressure sensor is therefore used as the wind sensor 30, which is arranged in the interior of the housing 16 and communicates with the environment via a hose connection 32.
- Other sensors by means of which an air flow can be detected, which can be considered as a measure of the wind speed, are thermos probes in which the air flow cools an electrically heated probe, so that at constant heating power, the temperature or at constant temperature, the heating power is a measure of the Flow rate is, or a strain gauge circuit, which uses the bend of a particular body exposed to the air flow as a measure of the flow velocity detected two DMS elements and evaluated with a bridge circuit.
- the wind sensor 30 may in turn be mounted on the surface of the housing 16.
- the wind sensor 22 has a sensor head (not shown) which either has a large detection range or is self-aligning. Depending on the geometry of the sensor head different large detection ranges can be covered, in which the deviations from measured to actual wind speed z. B. below 5%. In this case, recourse can be made to known investigations in connection with total pressure probes, with particularly shielded probe heads, such. B. Kielsche probes come as a geometry template in question.
- the sensor head may be attached to a movable wing, whereby it may be modeled on a simple Prandtlrohr.
- the wing must ensure free rotation in accordance with the attacking wind and the connection from the receiving tube to the sensor must be flexible so as not to restrict the mobility of the wing.
- a completely different principle for determining the input variable wind speed can be to determine immediate deformations, vibrations or accelerations on parts of the sunshade, which can be considered as a measure of the wind speed.
- deformations caused by wind can be determined with the aid of DMS circuits. These are preferably attached to a heavily loaded component of the sunshade system, in awnings, for example, on a awning support tube in the arm support or on the arm profiles.
- the strain gauge circuit is formed according to the deformation to be determined as a quarter, half or full bridge, wherein the resistance changes occurring in the measuring strips are a measure of the deformation and thus the attacking wind load.
- a mercury switch for detecting the vibrations and vibrations or a z.
- the sensor system 10 shown in FIG. 1 further has a rain sensor 34, which can detect precipitation or moisture and especially in wet-sensitive sun protection systems, such. As awnings, can cause the retraction of the system.
- the sensor 10 also has a temperature sensor 36, the signal of which can be used as a further input variable for the controller 14.
- the microcontroller 38 is connected to the controller 14 via a two-wire or three-wire bus line 44.
- FIG. 2 shows a schematic cross-section of a lamella trap door 12, in the upper rail 46 of which a sensor 10 according to the sensor system shown in FIG. 1 without a housing and a control 14 are integrated.
- the lens 26, the temperature sensor 36 and the opening of the hose 32 connected to the wind sensor 30 are provided on the outside of a shutter 48 which covers the upper part of a shaft 50 in which the external blind 12 is mounted.
- the external venetian blind 12 has a Lamellenbehang 52, the individual louvers 54 are shown in Fig. 2 in the retracted position as a package gathered.
- the external venetian blind 12 has two motors 17 (see Fig. 3), by means of which the slat curtain 52 extendable and the inclination of the slats 54 is adjustable. The control of the motors is taken over by the controller 14, wherein in addition to a purely automatic control and a manual intervention for the extension length and the angle adjustment of the curtain 52 is provided.
- the functional diagram shown in FIG. 3 shows the controller 14 for the motors 17 of the Venetian blind 12 in FIG. 2 with the sensors provided for determining relevant input variables.
- the sensors provided for determining relevant input variables.
- the already mentioned manual hand switches 56, 58 for the extension length or the angle setting of the curtain 52 are shown to determine further input variables.
- the handset can also be designed in the form of a remote control.
- Further input variables represent the actual extension length detected with the aid of an encoder 60 and the actual angular position of the curtain 52 detected with the aid of a further encoder 62.
- the two encoders 60, 62 can be provided on the motors 17, for example in the form of rotary encoders.
- the mentioned measured or adjusted input variables are forwarded to the multiplexer 40 and an analog-to-digital converter 42 following this, which converts the incoming sensor signals serially.
- the transducer 42 is followed by a sensor signal adaptation 64, which, for example, linearizes characteristic curves or converts signal pulses into a continuous variable.
- Sequence programs are stored on an EPROM memory module 66 which generate the output variables for controlling the motors 17 as a function of the output signal of the sensor signal adaptation 64.
- the control programs continue to be influenced by the contents of a memory 68, in which information about the geographic length and width of the exhibition site of the sun protection system 12 are deposited, since only on the exact geographical indication of an exact determination of the position of the sun relative to the sun protection system 12 is possible. However, even without this information, a good approximation for many locations is possible with the aid of a default setting.
- the controller 14 is constructed so that the values for the extension length or the angle setting manually inputted with the manual switches 56, 58 are given priority over the setting determined according to the measured input values based on the basic programming. If a manual setting is not corrected for a certain time, the controller 14 automatically adjusts the setting to the theoretical ideal course over a predefined period of several hours.
- the transitions are sigmoidal in order to allow as inconspicuous as possible a return.
- the sigmoidal transitions are realized via Bézier curves, which guarantee that the return curve always has only one turning point.
- the input variables time of day and date ascertained by the radio-controlled clock 20 serve to track the setting angle of the slats 54 to the sun's altitude, whereby the date information can compensate for season-dependent changes in the sun's path.
- special calculation formulas are stored in the controller 14, which calculate the azimuth and elevation angles of the solar radiation.
- input magnitude direction can be calculated whether the sun can shine directly on the system at all and which relative position it occupies the plant.
- These calculations can be further specified by the information stored in the memory 68 about the geographical location of the system 12, the data also being from a GPS receiver integrated in the system can be provided.
- the geographic data is stored in the memory 68 during installation of the system, for example by transmission from a mobile GPS receiver, immediate input of the geographical data or the auxiliary input of the geographic location approximately indicative information such. As postcodes or license plates.
- the other input variables sun intensity, wind speed, rain and temperature are treated so that when exceeding or falling below certain thresholds retraction of the system is caused by the controller 14. If appropriate, these threshold values can be varied as a function of the actual extension state of the system 12 determined by the encoders 60, 62.
- a further memory module 70 designed as an EEPROM is provided, which enables an adaptive learning capability of the controller 14.
- the memory module 70 it is possible in a manual intervention to store the system state, ie all input variables and output variables used for the adaptive learning capability, namely the setting parameters of the blind, in the form of a state vector.
- the input variables used for the learning process include the Time of day, month and day of the week, the wind speed, the temperature and the sun's intensity, but also the signal of the humidity sensor 34 in question.
- the controller 14 now permanently compares the input variables of all stored vectors with the actual variables of the system. If the system is again in a similar or even identical state in which previously manually determined output variables have been selected in deviation from the basic programming, then this vector is called again (recall). As a result, the stored output values corresponding to a previously made manual setting are automatically adjusted. Using the input variables, the system tries to determine the reason that led to a manual operation. Although an absolutely sure recognition of a cause is hard to achieve, with every additional input used in the adaptive learning ability, the certainty to recognize the user's will increases.
- the threshold values are not defined as fixed variables, but defined for each input variable as so-called recall range. These recall areas should be adapted only after repeated operation to provide greater safety and insensitivity to accidental manual intervention. It is therefore intended to select the recall areas very small with only a single input, so that a recall occurs only if the actual state values are identical with the stored input variables of a vector.
- the adaptation of the recall areas is carried out according to specific, defined rules that are components of the learning and control algorithms of the controller 14. If a hand setting z. B. at a certain time of day always on the same day of the week, the controller assumes that this setting should be made only on this day of the week.
- the generated Recall area is therefore limited to a weekday, but extended to all calendar weeks. If the entries are made on different days of the week, a relatively large extension of the recall area also takes place with reference to this input variable. This adaptation takes place continuously, whereby an optimal adaptation of the adaptation behavior to the desired learning behavior is possible.
- the learning algorithm is also able to weight input points of the user depending on their time distances from each other and their age. Older inputs are only used to a limited extent for the definition of the recall areas, whereby very old vectors of input quantities can also be deleted.
- the controller 14 further provides the possibility of a reset which clears all vectors and returns the algorithm to its start state in which the outputs are determined from the detected inputs only through the basic programming.
- the automatic control can also be switched off by the manual switches 56, 58.
- the sensors 10, control 14 and motors 17 of the sun protection system 12 need to supply only a conventional household power grid without additional components or even control lines, as they are found in previously implemented systems. With the connection to the power grid, the system is ready, with possibly only the data for the geographical location and / or the orientation of the system must be stored.
- the described combination of a sensor 10 with a controller 14 is also suitable for automatically controlling other sun protection systems, such. B. from awnings.
- the controller 14 can produce output signals for only one motor, for two motors (see embodiment) or even more motors.
- the basic programming must be adjusted, with adapted programming, the use of one and the same Unit of sensor 10 and controller 14 can be used for a variety of types of sun protection.
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Blinds (AREA)
- Operating, Guiding And Securing Of Roll- Type Closing Members (AREA)
Description
- Die Erfindung befaßt sich mit einer Sonnenschutzanlage mit einem motorisch einstellbaren Behang und einer Steuerung, die die Einstellung des Behangs in Abhängigkeit von wenigstens einer bestimmten Eingangsgröße nach einer vorgegebenen Grundprogrammierung zur Erzeugung wenigstens einer Ausgangsgröße vornimmt, wobei eine manuelle Eingriffsmöglichkeit zur Realisierung von der automatischen Einstellung abweichender Einstellungen des Behangs vorgesehen ist.
- Es ist bereits bekannt, Sonnenschutzanlagen mit einer automatischen Steuerung zu versehen, die anhand bestimmter Eingangsparameter Ausgangsgrößen erzeugen, beispielsweise zur Ansteuerung von Elektromotoren, mit Hilfe derer der Behang entsprechend den Eingangsparametern automatisch einstellbar ist. Die Grundprogrammierung solcher Anlagen kann zwar in einer als optimal angenommenen Art und Weise erfolgen, jedoch ist es im Voraus sehr schwierig, die tatsächlichen Beleuchtungseigenschaften eines Raumes zu erkennen, wobei auch das subjektive Empfinden der in mit derartigen Anlagen verschatteten Räumen arbeitenden oder lebenden Menschen sehr unterschiedlich sein kann. Zwar kann man sich durch manuelle Eingriffe in die Steuerung behelfen und den gewünschten Verschattungszustand einstellen, jedoch muß der Nutzer dann auf die automatische Nachstellung der Sonnenschutzanlage ganz verzichten oder ständig manuelle Änderungen vornehmen, was kaum als akzeptable Lösung gelten kann.
- Es ist zwar möglich, die Programmierung einer Steuerung vor Ort den Benutzerwünschen anzupassen, dies gestaltet sich jedoch äußerst arbeits- und kostenintensiv und ist ohne geschultes Fachpersonal nicht durchführbar.
- Die Aufgabe der Erfindung besteht darin, eine Sonnenschutzanlage zu schaffen, die ohne aufwendige Nachprogrammierung den Nutzeranforderungen besser gerecht wird.
- Erfindungsgemäß wird die Aufgabe durch eine Sonnenschutzanlage der eingangs beschriebenen Art gelöst, bei welcher die Steuerung manuell gewählte Einstellungen des Behangs zusammen mit wenigstens einer zum Zeitpunkt des manuellen Eingriffs vorliegenden Eingangsgröße erfaßt, abspeichert und ab einer bestimmten Anzahl im wesentlichen gleicher, wenigstens zweifach wiederholter manueller Eingriffe bei im wesentlichen gleicher Eingangsgröße die Grundprogrammierung für künftige Einstellungen beim Vorliegen dieser Eingangsgröße unter Bewertung der manuellen Eingriffe verändert.
- Anders als bei herkömmlichen Systemen entfällt bei der erfindungsgemäßen, selbstlernenden Steuerung jegliche mehr oder weniger komplizierte Programmierung durch den Benutzer. Die Programmierung der Steuerung, d. h. die Abweichung von der vorgegebenen Grundprogrammierung entsprechend den Nutzerwünschen, erfolgt einzig durch die im Automatikbetrieb erfolgenden manuellen Einstellungen, die das System erfaßt und aus ihnen lernt.
- Die bei der Steuerung verwendeten Steuer- und Lernalgorithmen haben zur Folge, daß der Benutzer lediglich in der Anfangsphase nach der Inbetriebnahme der Sonnenschutzanlage manuelle Änderungen entsprechend seinen Wünschen vornehmen muß und nach einiger Zeit die Anlage gar nicht mehr wahrnimmt, da immer die gewünschten Einstellungen vorherrschen.
- Um Fehlprogrammierungen durch einmalige manuelle Eingriffe zu verhindern, beispielsweise wenn ein Raum einmal von einer dritten Person benutzt wird oder ein Raum für eine Bildpräsentation einmalig vollständig abgedunkelt wird, ist es zweckmäßig, eine Anpassung der Programmierung nicht von einem einzigen manuellen Eingriff abhängig zu machen. Beispielsweise kann vorgesehen sein, daß die Steuerung die Programmierung mit zunehmender Anzahl von Wiederholungen im wesentlichen gleicher manueller Einstellungen bei im wesentlichen gleicher Eingangsgröße schrittweise der manuellen Einstellung anpaßt und bei vorliegender Eingangsgröße die angepaßte Einstellung des Behangs vornimmt. Als Alternative ist es denkbar, daß nach einer bestimmten Anzahl von Wiederholungen im wesentlichen gleicher manueller Einstellungen bei im wesentlichen gleicher Eingangsgröße die Programmierung die manuelle Einstellung übernimmt und sie bei Vorliegen der Eingangsgröße wiederholt.
- Während bei der schrittweisen Anpassung beispielsweise so vorgegangen werden kann, daß einmalige oder zweimalige manuelle Eingriffe nur minimale Änderungen hervorrufen, empfiehlt es sich bei der zweiten beschriebenen Variante, eine wenigstens drei- bis vierfache Wiederholung der manuellen Einstellung für eine Änderung der Programmierung vorauszusetzen, um mit hinreichender statistischer Sicherheit davon ausgehen zu können, daß den manuellen Eingriffen eines Nutzers der Wunsch nach einer grundsätzlichen Änderung der Programmierung zugrunde liegt.
- Vorzugsweise ist der Lernalgorithmus so ausgelegt, daß der Aufruf der angepaßten oder übernommenen Einstellung in einem bestimmten Parameterbereich der erfaßten Eingangsgröße erfolgt. Hierdurch wird verhindert, daß es durch übertriebene Genauigkeit bei der Erfassung der Eingangsgröße und der manuell eingestellten Ausgangsgrößen nahezu ausgeschlossen ist, daß sich dieser Zustand wiederholt, da der Nutzer manuelle Einstellungen immer mit einer gewissen Streubreite vornehmen wird und auch die erfaßten Eingangsgrößen insbesondere bei der Erfassung mehrerer Eingangsgrößen kaum zum wiederholten Male identisch vorliegen dürften.
- In der Festlegung der Breite der Parameterbereich liegt auch eine weitere Möglichkeit, eine Wiederholung einmalig vorgenommener manueller Einstellungen zu vermeiden, indem der Parameterbereich der Eingangsgröße mit zunehmender Anzahl wiederholter manueller Einstellungen breiter ist und beispielsweise bei einer einmaligen Eingabe eine Wiederholung nur bei exakt wiederholten Eingangsgrößen vorgenommen wird.
- Die Steuerung erfaßt wenigstens die Eingangsgrößen Tageszeit, Wochentag, Datum, Windgeschwindigkeit, Sonnenintensität und/oder Temperatur und berücksichtigt diese bei der Veränderung der Einstellung des Behangs und/oder der Programmierungsänderung. Grundsätzlich müssen dabei nicht alle Eingangsgrößen, die von der Steuerung zur Einstellung des Behangs herangezogen werden, in die Lernvorgänge mit einbezogen werden. Grundsätzlich ist jedoch davon auszugehen, daß mit zusätzlichen Eingangsgröße, die zur Programmierungsänderung herangezogen wird, eine verbesserte Anpassung an die Benutzerwünsche durch Änderung der Programmierung möglich ist.
- Vorzugsweise erfolgt bei mehreren ausgewerteten Eingangsgrössen ein Aufruf einer angepaßten oder übernommenen Einstellung dann, wenn alle Eingangsgrößen innerhalb bestimmter Parameterbereiche liegen.
- Durch diese logische Und-Verknüpfung wird die Sicherheit eines Erkennens eines Grundes erhöht, der zu einem manuellen Eingriff in die Steuerung führte. Auch wenn eine absolute Sicherheit beim Erkennen eines Grundes für einen manuellen Eingriff nicht zu erreichen ist, können mit zunehmender Anzahl erfaßter Eingangsgrößen die Parameterbereiche enger gefaßt werden, ohne daß dies Fehlprogrammierungen, d. h. unerwünschte Änderungen der Behangstellung, nach sich ziehen würde.
- In weiterer bevorzugter Ausbildung der Erfindung ist vorgesehen, daß nach einer bestimmten Zeitdauer nach einem manuellen Eingriff oder einem Aufruf einer angepaßten oder übernommenen Einstellung eine Rückstellung in eine Einstellung gemäß der Grundprogrammierung oder in eine geänderte Einstellung erfolgt. Auf diese Weise wird sichergestellt, daß der Behang nicht in veränderten Einstellungen verharrt, sondern die Sonnenschutzanlage selbsttätig wieder zur automatischen Steuerung zurückkehrt. Vorzugsweise erfolgt die Rückstellung über eine interpolierte Verstellkurve, die anhand der Ausgangs- und anzufahrenden Endeinstellung des Behangs von der Steuerung ermittelbar ist. Durch die interpolierten Verstellkurven lassen sich plötzliche Verstellvorgänge vermeiden, die von den in dem von der Sonnenschutzanlage verschatteten Raum anwesenden Personen als sehr störend empfunden werden. Besonders angenehme Verstellcharakteristiken ergeben sich, wenn die Rückstellung sigmoidförmig erfolgt, wobei die sigmoidförmigen Übergänge durch Bèzier-Kurven realisiert sind. Derartige Rückstellkurven besitzen nur einen Wendepunkt und ergeben dadurch eine als besonders weich und angenehm empfundene Änderung der Beleuchtung bei der Verstellung.
- Unter Umständen kann es sinnvoll sein, daß die Sonnenschutzanlage auf eine rein manuelle Steuerung umschaltbar ist, beispielsweise um im Falle von Systemfehlern dennoch eine gewünschte Behangstellung dauerhaft einstellen zu können. Andererseits kann es zweckdienlich sein, wenn die Steuerung in einen Zustand schaltbar ist, in welchem weitere manuelle Einstellungen keine Änderung der Grundprogrammierung bewirken. Wird beispielsweise ein Raum zwischenzeitlich von anderen Personen genutzt, könnten diese die Programmierung des eigentlichen Nutzers durch wiederholte manuelle Eingriffe manipulieren, so daß der eigentliche Nutzer seine Sonnenschutzanlage anschließend wieder neu "programmieren" müßte. Ferner kann es von Vorteil sein, die Steuerung mit Hilfe einer Eingabe bestimmter Signale auf die Grundprogrammierung rückstellen zu können.
- Die beschriebene Steuerung ist grundsätzlich bei allen Arten von Sonnenschutzanlagen einsetzbar, wobei die Einstellung des Behangs durch Variation wenigstens einer Ausgangsgröße, beispielsweise der Behanglänge, der Behangneigung oder der Lamellenneigung bei Raffstoren erfolgt. Die Ausgangsgrößen können beispielsweise die Steuersignale von Elektromotoren sein.
- Nachfolgend wird anhand der beigefügten Zeichnungen näher auf Ausführungsbeispiele der Erfindung eingegangen. Es zeigen:
- Fig. 1
- ein schematisches Schaubild einer Sensorik zur Ermittlung relevanter Eingangsgrößen für die Steuerung von Sonnenschutzanlagen;
- Fig. 2
- einen Schnitt einer Sonnenschutzanlage mit integrierter Sensorik;
- Fig. 3
- ein Funktionsschaubild einer mit der Sensorik gemäß Fig. 1 oder 2 verknüpften Steuerung.
- In Fig. 1 ist eine Sensorik 10 zur Ermittlung aktiver Eingangsgrößen zur Regelung einer Sonnenschutzanlage 12 (siehe Fig. 2) dargestellt, die an eine Steuerung 14 (siehe Fig. 2 und 3) übermittelt werden, die bei Erreichen definierter Schaltwerte Fahrbefehle an die Antriebe 17 (siehe Fig. 3) der Sonnenschutzanlage 12 übermittelt und so eine automatische Einstellung der Sonnenschutzanlage 12 ermöglicht.
- Die in Fig. 1 dargestellte Sensorik 10 ist in einem separaten Gehäuse 16 untergebracht, das mit Hilfe von Anschlußleitungen 18 mit der Steuerung 14 gekoppelt ist. Die Sensorik 10 muß wenigstens die Eingangsgrößen Uhrzeit/Datum, Sonnenintensität und Himmelsrichtung der Sonnenschutzanlage ermitteln, um eine automatische Steuerung der Sonnenschutzanlage 12 in Abhängigkeit vom Sonnenstand ermöglichen zu können. Insbesondere bei außen liegenden Sonnenschutzanlagen sind die Erfassung der zusätzlichen Eingangsgrößen Windgeschwindigkeit und Außentemperatur durch die Sensorik 10 sowie ein Regendetektor sinnvoll.
- Zur Ermittlung der Eingangsgröße Uhrzeit/Datum verfügt die Sensorik 10 über einen Funkempfänger 20, der elektromagnetische Funkuhrsignale empfängt und zur Berechnung des aktuellen Sonnenstandes an die Steuerung 14 weitergibt. Der Funkempfänger 20 ist selbstverständlich mit einer geeigneten Antenne (nicht dargestellt) ausgebildet, die einen sicheren Datenempfang standortunabhängig innerhalb des Sendebereichs sicherstellt. Die Ermittlung des Wochentages und die Sommerzeitkorrektur können programmtechnisch in der Steuerung 14 realisiert werden.
- Statt eines Funkempfängers 20 kann die Sensorik 10 auch über eine Uhr verfügen, die die benötigten Eingangsgrößen bereitstellt. Allerdings besteht bei unabhängigen Uhren der Nachteil, daß sich im Laufe der Jahre Gangabweichungen einstellen oder es infolge von Stromausfällen gar zu einer völligen Verstellung kommt, die einen erneuten manuellen Eingriff mit Stellen der Uhrzeit erforderlich macht. Demgegenüber bietet die Ermittlung der Eingangsgröße Uhrzeit/Datum auf der Basis des Funkuhrprinzips eine nahezu perfekte Ganggenauigkeit und die Möglichkeit des automatischen Erst- und Nacheinstellens.
- Die Ermittlung der Eingangsgröße Sonnenintensität erfolgt mit Hilfe eines Sonnensensors 22, der als Fotowiderstand, Fotodiode oder Solarzelle ausgebildet ist. Es ist auch denkbar, mehrere derartige Sensoren - auch unterschiedlicher Art - zur Ermittlung der Sonnenintensität vorzusehen. Der Sonnensensor 22 ist bei dem dargestellten Ausführungsbeispiel unmittelbar auf der Platine des Auswertesystems innerhalb des Sensorgehäuses 16 angeordnet und über einen Lichtleiter 24 mit einer auf der Gehäuseaußenwand sitzenden Linse 26 verbunden. Es ist jedoch auch denkbar, das lichtempfindliche Element selbst auf der Gehäuseaußenseite zu montieren und die Verbindung zu der Platine mit Hilfe elektrischer Leitungen herzustellen. Der Sonnensensor liefert der Steuerung 14 eine Information darüber, ob die Sonnenschutzanlage 14 bzw. die von ihr zu verschattende Fensterfläche überhaupt einer Sonneneinstrahlung ausgesetzt ist oder ob beispielsweise infolge von Bewölkung ein Ausfahren der Sonnenschutzanlage überhaupt notwendig ist. Umgekehrt kann der Sonnensensor 22 auch beispielsweise von einer gegenüber liegenden Fassade reflektiertes Sonnenlicht erfassen und ein Ausfahren der Sonnenschutzanlage zu einer Tageszeit bewirken, zu welcher die Steuerung eigentlich davon ausgeht, daß die betroffene Fassade im Schatten liegt.
- Zur Erfassung der Eingangsgröße Himmelrichtung, d.h. der geographischen Ausrichtung der Sonnenschutzanlage 12, ist ein Richtungssensor 28 vorgesehen, der nach der Montage automatisch die Ausrichtung der Sonnenschutzanlage 12 erkennt, was bei dem in Fig. 1 separat ausgeführten Gehäuse 16 der Sensorik 10 natürlich voraussetzt, daß dieses sich in einer genau definierten Lage zur Sonnenschutzanlage befindet. Der Richtungssensor 28 kann in seiner Ausführung als elektronischer Kompaß zwei oder drei Achsen des Endmagnetfeldes messen und aus den einzelnen Komponenten des Magnetfeldes die Absolutrichtung berechnen. Für die meisten Anwendungsfälle reicht die Messung der beiden Horizontalkomponenten aus, da die Sonnenschutzanlage und damit der Richtungssensor 28 bei der Montage mit Hilfe einer Wasserwaage exakt ausgerichtet werden. Es ist darauf zu achten, daß ferromagnetische Bauteile der Sonnenschutzanlage, wie z. B. die Antriebsmotoren 17 das zu messende Erdmagnetfeld nicht stören. Während Störungen innerhalb der Sensorik 10 rechnerisch kompensiert werden können, sollten die Antriebsmotoren 17 während der Messungen ausgeschaltet bleiben, um das Meßergebnis nicht zu verfälschen. Der elektronische Kompaß 28 kann beispielsweise als Fluxgatesensor oder als magnetoresesiver Sensor ausgeführt sein.
- Weiterhin bietet die Sensorik 10 die Möglichkeit mit Hilfe eines Windsensors 30 die Eingangsgröße Windgeschwindigkeit zu erfassen und damit bei starkem Wind eine Gefährdung der Anlage durch mechanische Überbelastung durch Veranlassen des Einfahrens der Anlage zu vermeiden.
- Grundsätzlich ist als Windsensor ein herkömmliches Schalenkreuzanemometer einsetzbar, das jedoch nur die Hoizontalkomponenten des anstehenden Windes bis zu einer Abweichung von ungefähr 15° aus der Horizontalen erfassen kann. Bei schräger angreifenden Winden wird die Eingangsgröße Windgeschwindigkeit zu niedrig angegeben, bei reinen Auf- oder Fallwinden können derartige Schalenkreuzanimometer gar keine Windbewegung erfassen. Zudem benötigen Schalenkreuzanimometer relativ viel Platz.
- Bei der in Fig. 1 dargestellten Sensorik 10 wird daher als Windsensor 30 ein Drucksensor eingesetzt, der im Inneren des Gehäuses 16 angeordnet ist und über eine Schlauchverbindung 32 mit der Umgebung in Verbindung steht. Weitere Sensoren, mit Hilfe derer ein Luftstrom erfaßbar ist, der als Maß für die Windgeschwindigkeit gelten kann, sind Thermosonden, bei welchen der Luftstrom einen elektrisch beheizten Meßfühler abkühlt, so daß bei konstanter Heizleistung die Temperatur oder bei konstanter Temperatur die Heizleistung ein Maß für die Strömungsgeschwindigkeit ist, oder eine DMS-Schaltung, die die Biegung eines dem Luftstrom ausgesetzten bestimmten Körpers als Maß für die Strömungsgeschwindigkeit mit Hilfe zweier DMS-Elemente erfaßt und mit einer Brückenschaltung auswertet. Selbstverständlich kann statt der Schlauchverbindung 32 der Windsensor 30 wiederum an der Oberfläche des Gehäuses 16 montiert sein.
- Um eine gleichwertige Erfassung der Windgeschwindigkeit aus allen Windrichtungen zu erlauben, verfügt der Windsensor 22 über einen Sensorkopf (nicht gezeigt), der entweder einen großen Erfassungsbereich besitzt oder selbstausrichtend ausgebildet ist. Abhängig von der Geometrie des Sensorkopfes können unterschiedliche große Erfassungsbereiche abgedeckt werden, bei denen die Abweichungen von gemessener zu tatsächlicher Windgeschwindigkeit z. B. unter 5 % liegen. Hierbei kann auf bekannte Untersuchungen im Zusammenhang mit Gesamtdrucksonden zurückgegriffen werden, wobei besonders abgeschirmte Sondenköpfe, wie z. B. Kielsche Sonden als Geometrievorlage in Frage kommen.
- Alternativ kann der Sensorkopf an einem beweglichen Flügel befestigt sein, wobei er einem einfachen Prandtlrohr nachempfunden sein kann. Der Flügel muß eine freie Drehbarkeit entsprechend dem angreifenden Wind gewährleisten und die Verbindung vom Aufnahmerohr zum Sensor muß flexibel sein, um die Beweglichkeit des Flügels nicht einzuschränken.
- Ein völlig anderes Prinzip zur Ermittlung der Eingangsgröße Windgeschwindigkeit kann darin bestehen, unmittelbare Verformungen, Vibrationen oder Beschleunigungen an Teilen der Sonnenschutzanlage zu ermitteln, die als Maß für die Windgeschwindigkeit gelten können.
- Beispielsweise können durch Wind verursachte Verformungen mit Hilfe von DMS-Schaltungen ermittelt werden. Diese werden vorzugsweise an einem stark belasteten Bauteil der Sonnenschutzanlage angebracht, bei Markisen beispielsweise an einem Markisentragrohr im Bereich der Armaufnahme oder an den Armprofilen. Die DMS-Schaltung ist entsprechend der zu ermittelnden Verformung als Viertel-, Halb- oder Vollbrücke ausgebildet, wobei die in den Meßstreifen auftretenden Widerstandsänderungen ein Maß für die Verformung und damit für die angreifende Windlast sind.
- Ferner ist es möglich, durch den angreifenden Wind hervorgerufene Vibrationen oder Beschleunigungen als Maß für die angreifende Windlast zu erfassen. Hierzu wird in einem vibrationsbelasteten Bauteil der Sonnenschutzanlage ein Quecksilberschalter zum Erfassen der Vibrationen und Erschütterungen bzw. ein z. B. nach dem Piezoprinzip arbeitender Beschleunigungssensor zur Erfassung der auftretenden Beschleunigungen integriert. Die oberhalb bestimmter Schwellenwerte geschalteten Impulse werden von der Steuerung 14 ausgewertet und veranlassen gegebenenfalls das Einfahren der Anlage. In diesem Fall ist die Anordnung der Sensoren im Bereich unter Windlast stark bewegter Bauteile zweckmäßig, wie z. B. Unterschienen von Raffstoren oder Ausfallprofilen von Markisen.
- Die in Fig. 1 dargestellte Sensorik 10 verfügt weiterhin über einen Regensensor 34, der Niederschlag bzw. Feuchtigkeit erfassen kann und insbesondere bei nässeempfindlichen Sonnenschutzanlagen, wie z. B. Markisen, das Einfahren der Anlage veranlassen kann.
- Die Sensorik 10 verfügt auch über einen Temperatursensor 36, dessen Signal als weitere Eingangsgröße für die Steuerung 14 herangezogen werden kann.
- Die in Fig. 1 dargestellte Sensorik 10, die in einem separaten Gehäuse 16 untergebracht ist, verfügt ferner über einen integrierten Mikrocontroller 38, der einen Multiplexer 40 und einen Analog/Digital-Wandler 42 (siehe Fig. 3) aufweist, wobei der Multiplexer 40 und der A/D-Wandler 42 in Fig. 3 als Teil der Steuerung 14 dargestellt sind. Der Mikrocontroller 38 ist über eine Zweidraht- oder Dreidraht-Busleitung 44 mit der Steuerung 14 verbunden.
- Fig. 2 zeigt einen schematischen Querschnitt eines Lamellenraffstores 12, in dessen Oberschiene 46 eine Sensorik 10 entsprechend der in Fig. 1 dargestellten Sensorik ohne Gehäuse und eine Steuerung 14 integriert sind. Die Linse 26, der Temperatursensor 36 und die Öffnung der mit dem Windsensor 30 verbundenen Schlauchleitung 32 sind an der Außenseite einer Blende 48 vorgesehen, die den oberen Teil eines Schachtes 50 abdeckt, in welchem der Raffstore 12 montiert ist. Der Raffstore 12 verfügt über einen Lamellenbehang 52, dessen Einzellamellen 54 in Fig. 2 in der eingefahrenen Stellung als Paket gerafft dargestellt sind. Der Raffstore 12 verfügt über zwei Motoren 17 (siehe Fig. 3), mit Hilfe derer der Lamellenbehang 52 ausfahrbar und die Neigung der Lamellen 54 einstellbar ist. Die Ansteuerung der Motoren wird von der Steuerung 14 übernommen, wobei neben einer rein automatischen Ansteuerung auch ein manueller Eingriff für die Ausfahrlänge und die Winkeleinstellung des Behangs 52 vorgesehen ist.
- Das in Fig. 3 dargestellte Funktionsschaubild zeigt die Steuerung 14 für die Motoren 17 des Raffstores 12 in Fig. 2 mit den zur Ermittlung relevanter Eingangsgrößen vorgesehenen Sensoren. Neben dem bereits beschriebenen Temperatursensor 36, Regensensor 34, Richtungssensor 28, Funkempfänger 20, Sonnensensor 22 und Windsensor 30 sind zur Ermittlung weiterer Eingangsgrößen die bereits angesprochenen manuellen Handschalter 56, 58 für die Ausfahrlänge bzw. die Winkeleinstellung des Behangs 52 dargestellt. Die Handschalter können auch in Form einer Fernbedienung ausgeführt sein. Weitere Eingangsgrößen stellen die mit Hilfe eines Gebers 60 erfaßte Ist-Ausfahrlänge sowie die mit Hilfe eines weiteren Gebers 62 erfaßte Ist-Winkelstellung des Behangs 52 dar. Die beiden Geber 60, 62 können beispielsweise in Form von Drehwinkelgebern an den Motoren 17 vorgesehen sein.
- Die erwähnten gemessenen oder eingestellten Eingangsgrößen werden an den Multiplexer 40 und einen diesem nachgeschalteten Analog/Digital-Wandler 42 weitergegeben, der die eingehenden Sensorsignale seriell wandelt. An den Wandler 42 schließt sich eine Sensorsignalanpassung 64 an, die beispielsweise Kennlinien linearisiert oder Signalimpulse in eine kontinuierliche Größe umwandelt. Auf einem EPROM-Speichermodul 66 sind Ablaufprogramme gespeichert, die in Abhängigkeit vom Ausgangssignal der Sensorsignalanpassung 64 die Ausgangsgrößen zur Ansteuerung der Motoren 17 erzeugen. Die Steuerprogramme werden weiterhin vom Inhalt eines Speichers 68 beeinflußt, in welchem Informationen über die geographische Länge und Breite des Ausstellungsortes der Sonnenschutzanlage 12 hinterlegt sind, da nur über die exakte geographische Angabe eine exakte Ermittlung des Sonnenstandes relativ zur Sonnenschutzanlage 12 möglich ist. Allerdings ist auch ohne diese Information mit Hilfe einer Voreinstellung eine gute Näherung für viele Einsatzorte möglich.
- Die Steuerung 14 ist so aufgebaut, daß die mit den Handschaltern 56, 58 manuell eingegebenen Werte für die Ausfahrlänge oder die Winkeleinstellung mit Vorrang vor der entsprechend der gemessenen Eingangsgrößen anhand der Grundprogrammierung ermittelten Einstellung behandelt werden. Wird eine manuelle Einstellung für eine bestimmte Zeit nicht korrigiert, gleicht die Steuerung 14 in einem vordefinierten Zeitraum von mehreren Stunden die Einstellung selbständig wieder an den theoretischen Idealverlauf an. Die Übergänge erfolgen sigmoidförmig, um ein möglichst unauffälliges Rückstellen zu ermöglichen. Die sigmoidförmigen Übergänge werden über Bèzier-Kurven realisiert, die garantieren, daß die Rückführ-Kurve immer nur einen Wendepunkt besitzt.
- Die von der Funkuhr 20 ermittelten Eingangsgrößen Tageszeit und Datum dienen zur Nachführung des Einstellungswinkels der Lamellen 54 zur Sonnenhöhe, wobei die Datumsinformation jahreszeitabhängige Änderungen der Sonnenbahn ausgleichen kann. Für die Nachführung werden spezielle Berechnungsformeln in der Steuerung 14 hinterlegt, die Azimut- und Elevationswinkel der Sonneneinstrahlung berechnen. In Verbindung mit der durch den Kompaß 28 ermittelten Eingangsgröße Himmelsrichtung läßt sich dabei berechnen, ob die Sonne überhaupt direkt auf die Anlage scheinen kann und welche Relativposition sie zur Anlage einnimmt. Diese Berechnungen lassen sich durch die in dem Speicher 68 hinterlegten Informationen über den geographischen Standort der Anlage 12 weiter präzisieren, wobei die Daten auch von einem in die Anlage integrierten GPS-Empfänger bereitgestellt werden können. Im übrigen werden die geographischen Daten bei der Montage der Anlage in dem Speicher 68 abgelegt, beispielsweise durch Übertragung aus einem mobilen GPS-Empfänger, unmittelbare Eingabe der geographischen Daten oder die hilfsweise Eingabe von den geographischen Standort näherungsweise kennzeichnenden Informationen, wie z. B. Postleitzahlen oder Kfz-Kennzeichen.
- Zur Vereinfachung der Sensorik ist es auch denkbar, den Richtungssensor 28 wegzulassen und auch die Ausrichtung der Sonnenschutzanlage in dem Speicher 68 bei der Montage als Voreinstellung zu hinterlegen.
- Die weiteren Eingangsgrößen Sonnenintensität, Windgeschwindigkeit, Regen und Temperatur werden so behandelt, daß bei Über- oder Unterschreiten bestimmter Schwellenwerte ein Einfahren der Anlage von der Steuerung 14 veranlaßt wird. Gegebenenfalls können diese Schwellenwerte in Abhängigkeit von dem durch die Geber 60, 62 ermittelten Ist- Ausfahrzustand der Anlage 12 variiert werden.
- Zusätzlich zu dem als EPROM ausgebildeten Speicher 68 ist ein weiteres, als EEPROM ausgebildetes Speichermodul 70 vorgesehen, das eine adaptive Lernfähigkeit der Steuerung 14 ermöglicht. Mit Hilfe des Speichermoduls 70 ist es möglich, bei einem manuellen Eingriff den Systemzustand, d. h. alle für die adaptive Lernfähigkeit herangezogenen Eingangsgrößen und Ausgangsgrößen, nämlich die Einstellungsparameter des Behangs, in Form eines Zustandsvektors abzuspeichern. Als für den Lernvorgang herangezogene Eingangsgrößen kommen u. a. die Tageszeit, Monat und Wochentag, die Windgeschwindigkeit, die Temperatur und die Sonnenintensität, aber auch das Signal des Feuchtigkeitssensors 34 in Frage.
- Während des Automatikbetriebes vergleicht die Steuerung 14 nunmehr permanent die Eingangsgrößen aller gespeicherter Vektoren mit den Ist-Größen des Systems. Befindet sich das System wieder in einem ähnlichen oder gar identischen Zustand, bei welchem zuvor manuell bestimmte Ausgangsgrößen in Abweichung von der Grundprogrammierung gewählt worden sind, so wird dieser Vektor erneut aufgerufen (Recall). Dies hat zur Folge, daß die gespeicherten Ausgangswerte, die einer zuvor vorgenommenen Handeinstellung entsprechen, automatisch eingestellt werden. Über die Eingangsgrößen versucht das System dabei, den Grund zu ermitteln, der zu einer Handbetätigung geführt hat. Zwar ist ein absolut sicheres Erkennen eines Grundes kaum zu erreichen, jedoch steigt mit jeder zusätzlichen bei der adaptiven Lernfähigkeit herangezogenen Eingangsgröße die Sicherheit zum Erkennen des Benutzerwillens.
- Für eine sinnvolle Bestimmung des Ähnlichkeitsmaßes der Eingangsgrößen des gespeicherten Vektors zum kontinuierlich erfaßten Ist-Zustand ist es notwendig, daß die Steueralgorithmen die Eingangsgrößen des Vektors einzeln betrachten und Adaptionsregeln und Parameter speziell angepaßt werden. Es ist allerdings zu beachten, daß die Eingangsgrößen zum Teil nicht unabhängig voneinander sind, sondern sich in den Adaptionsparametern gegenseitig beeinflussen. Bei der in Fig. 3 dargestellten Steuerung ist vorgesehen, daß für jede Eingangsgröße des Vektors eine absolute Differenz zwischen dem gespeicherten Zustand und dem erfaßten Ist-Zustand ermittelt wird. Für jede Eingangsgröße ist ein Schwellenwert definiert, der erreicht werden muß, um einen Recall zu bewirken. Die Ergebnisse der einzelnen Eingangsgrößen werden logisch und-verknüpft. Daraus folgt, daß ein Recall eines gespeicherten Vektors nur dann erfolgt, wenn sich alle Eingangsgrößen im vorgegebenen Variationsbereich zum Ist-Zustand befinden.
- Die Schwellenwerte sind nicht als starre Größen festgelegt, sondern für jede Eingangsgröße als sog. Recall-Bereich definiert. Diese Recall-Bereiche sollen erst bei wiederholter Betätigung adaptiert werden, um für eine größere Sicherheit und Unempfindlichkeit gegenüber zufälligen manuellen Eingriffen zu sorgen. Daher ist vorgesehen, die Recall-Bereiche bei nur einmaliger Eingabe sehr klein zu wählen, so daß ein Recall nur bei identisch mit den gespeicherten Eingangsgrößen eines Vektors übereinstimmenden Ist-Zustandswerten erfolgt.
- Die Adaption der Recall-Bereiche erfolgt nach bestimmten, festgelegten Regeln, die Bestandteile der Lern- und Steueralgorithmen der Steuerung 14 sind. Erfolgt eine Handeinstellung z. B. zu einer bestimmten Tageszeit immer an einem gleichen Wochentag, geht die Steuerung davon aus, daß diese Einstellung nur an diesem Wochentag erfolgen soll. Der erzeugte Recall-Bereich wird also auf einen Wochentag beschränkt, jedoch auf alle Kalenderwochen ausgedehnt. Erfolgen die Eingaben an verschiedenen Wochentagen, erfolgt auch mit Bezug auf diese Eingangsgröße eine relativ starke Ausdehnung des Recall-Bereichs. Diese Adaption erfolgt fortlaufend, wodurch eine optimale Anpassung des Adaptionsverhaltens an das gewünschte Lernverhalten möglich ist. Der Lernalgorithmus ist ferner in der Lage, Eingabepunkte des Benutzers abhängig von ihren zeitlichen Entfernungen zueinander und ihrem Alter zu gewichten. Ältere Eingaben werden zur Definition der Recall-Bereiche nur noch begrenzt herangezogen, wobei sehr alte Vektoren von Eingangsgrößen auch gelöscht werden können.
- Die Steuerung 14 bietet weiterhin die Möglichkeit eines Resets, der alle Vektoren löscht und den Algorithmus in seinen Startzustand zurückversetzt, in welchem die Ausgangsgrößen anhand der erfaßten Eingangsgrößen lediglich über die Grundprogrammierung ermittelt werden. Die automatische Steuerung ist durch die Handschalter 56, 58 auch abschaltbar.
- Die Sensorik 10, Steuerung 14 und Motoren 17 der Sonnenschutzanlage 12 benötigen zur Versorgung lediglich ein herkömmliches Haushalts-Stromnetz ohne zusätzliche Bauteile oder gar Steuerleitungen, wie sie bei bisher realisierten Systemen anzutreffen sind. Mit dem Anschluß an das Stromnetz ist die Anlage betriebsbereit, wobei gegebenenfalls lediglich noch die Daten für die geographische Lage und/oder die Ausrichtung der Anlage abgespeichert werden müssen.
- Statt zur Ansteuerung des beschriebenen Raffstores 12 eignet sich die beschriebene Kombination einer Sensorik 10 mit einer Steuerung 14 auch zur automatischen Ansteuerung sonstiger Sonnenschutzanlagen, wie z. B. vom Markisen. Je nach Art der anzusteuernden Sonnenschutzanlage kann die Steuerung 14 Ausgangssignale für nur einen Motor, für zwei Motoren (siehe Ausführungsbeispiel) oder auch mehr Motoren erzeugen. Zur Anpassung der Steuerung an den jeweiligen Typ von Sonnenschutzanlage muß lediglich die Grundprogrammierung angepaßt werden, wobei bei angepaßter Programmierung der Einsatz ein und derselben Einheit aus Sensorik 10 und Steuerung 14 für unterschiedlichste Arten von Sonnenschutzanlagen verwendet werden kann.
- Je nach Beschaffenheit der Sonnenschutzanlage kann auf einzelne Sensoren verzichtet werden, um die Kosten für die Sensorik 10 zu senken.
Claims (12)
- Sonnenschutzanlage mit einem motorisch einstellbaren Behang (52) und einer Steuerung (14), die die Einstellung des Behangs (52) in Abhängigkeit von wenigstens einer Eingangsgröße nach einer vorgegebenen Grundprogrammierung durch Erzeugung wenigstens einer Ausgangsgröße vornimmt, wobei eine manuelle Eingriffsmöglichkeit zur Realisierung von der automatischen Einstellung abweichender Einstellungen des Behangs (52) vorgesehen ist, dadurch gekennzeichnet, daß die Steuerung (14) manuell gewählte Einstellungen des Behangs (52) zusammen mit wenigstens einer zum Zeitpunkt des manuellen Eingriffs vorliegenden Eingangsgröße erfaßt, abspeichert und ab einer bestimmten Anzahl im wesentlichen gleicher, wenigstens zweifach wiederholter manueller Eingriffe bei im wesentlichen gleicher Eingangsgröße die Grundprogrammierung für künftige Einstellungen beim Vorliegen dieser Eingangsgröße unter Bewertung der manuellen Eingriffe verändert.
- Sonnenschutzanlage nach Anspruch 1, dadurch gekennzeichnet, daß die Steuerung (14) die Programmierung mit zunehmender Anzahl von Wiederholungen im wesentlichen gleicher manueller Einstellungen bei wenigstens einer im wesentlichen gleichen Eingangsgröße schrittweise der manuellen Einstellung anpaßt und bei Vorliegen der wenistens einen Eingangsgröße die angepaßte Einstellung des Behangs (52) vornimmt.
- Sonnenschutzanlage nach Anspruch 1 oder 2, dadurch gekennzeichnet, daß nach einer bestimmten Anzahl von Wiederholungen im wesentlichen gleicher manueller Einstellungen bei im wesentlichen gleichen Eingangsgrößen die Programmierung die manuelle Einstellung übernimmt und bei Vorliegen der wenigstens einen Eingangsgröße die manuell vorgegebene Einstellung des Behangs (52) wiederholt.
- Sonnenschutzanlage nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, daß der Aufruf der angepaßten oder übernommenen Einstellung des Behangs (52) in einem bestimmten Parameterbereich der wenigstens einen erfaßten Eingangsgröße erfolgt.
- Sonnenschutzanlage nach Anspruch 4, dadurch gekennzeichnet, daß der Bereich der wenigstens einen Eingangsgröße, in welchem angepaßte oder übernommene Einstellungen aufrufbar sind, mit zunehmender Anzahl wiederholter manueller Einstellungen des Behangs breiter ist.
- Sonnenschutzanlage nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, daß die Steuerung (14) wenigstens die Eingangsgrößen Tageszeit, Wochentag, Datum, Windgeschwindigkeit, Sonnenintensität und/oder Temperatur erfaßt und bei der Einstellung des Behangs (52) und/oder der Änderung der Programmierung berücksichtigt, wobei bei mehreren ausgewerteten Eingangsgrößen vorzugsweise ein Aufruf einer angepaßten oder übernommenen Einstellung des Behangs (52) dann erfolgt, wenn alle Eingangsgrößen innerhalb bestimmter Parameterbereiche liegen.
- Sonnenschutzanlage nach Anspruch 6, dadurch gekennzeichnet, daß mit zunehmender Anzahl erfaßter Eingangsgrößen die Parameterbereiche enger gefaßt sind.
- Sonnenschutzanlage nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, daß nach einer bestimmten Zeitdauer nach einem manuellen Eingriff oder nach einem Aufruf einer angepaßten oder übernommenen Einstellung des Behangs (52) eine Rückstellung in eine Einstellung gemäß der Grundprogrammierung oder in eine geänderte Einstellung erfolgt, wobei die Rückstellung vorzugsweise über eine interpolierte Verstellkurve, die anhand der Ausgangs- und der anzufahrenden Endstellung des Behangs (52) von der Steuerung (14) ermittelbar ist, beispielsweise sigmoidförmig erfolgt, wobei die sigmoidförmigen Übergänge durch Bezierkurven realisiert sind.
- Sonnenschutzanlage nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, daß die Programmierung der Steuerung (14) vorzugsweise auf die Grundprogrammierung rückstellbar ist und/oder auf eine rein manuelle Steuerung umschaltbar ist, wobei die Eingangsgrößen durch der Sonnenschutzanlage (12) individuell zugeordnete Sensoren (20, 22, 28, 30, 34, 36, 56, 58, 60, 62) ermittelbar sind und die Stromversorgung über ein Haushaltsstromnetz erfolgt.
- Sonnenschutzanlage nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, daß die Steuerung (14) in einen Zustand schaltbar ist, in welchem weitere manuelle Einstellungen des Behangs (52) keine Änderung der Programmierung bewirken.
- Sonnenschutzanlage nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, daß die Einstellung des Behangs (52) durch Variation von wenigstens zwei Ausgangsgrößen erfolgt.
- Sonnenschutzanlage nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, daß sie ein Raffstore (12) ist und die Einstellung des Behangs (52) durch Verändern der Ausgangsgrößen Behanglänge und Winkeleinstellung der Lamellen (54) erfolgt.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE19932730A DE19932730A1 (de) | 1999-07-14 | 1999-07-14 | Sonnenschutzanlage mit automatischer Behangsteuerung und manueller Eingriffsmöglichkeit |
| DE19932730 | 1999-07-14 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1069277A2 EP1069277A2 (de) | 2001-01-17 |
| EP1069277A3 EP1069277A3 (de) | 2003-06-18 |
| EP1069277B1 true EP1069277B1 (de) | 2006-05-10 |
Family
ID=7914628
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP00114879A Expired - Lifetime EP1069277B1 (de) | 1999-07-14 | 2000-07-12 | Sonnenschutzanlage mit automatischer Behangsteuerung und manueller Eingriffsmöglichkeit |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP1069277B1 (de) |
| AT (1) | ATE325934T1 (de) |
| DE (2) | DE19932730A1 (de) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10248003A1 (de) * | 2002-10-15 | 2004-04-29 | Bayerische Motoren Werke Ag | Automatischer Sonnenschutz für Fahrzeuge |
| US8836263B2 (en) | 2004-05-06 | 2014-09-16 | Mechoshade Systems, Inc. | Automated shade control in connection with electrochromic glass |
| US10619415B2 (en) | 2004-05-06 | 2020-04-14 | Mechoshade Systems, Llc | Sky camera system utilizing circadian information for intelligent building control |
| US8120292B2 (en) | 2004-05-06 | 2012-02-21 | Mechoshade Systems, Inc. | Automated shade control reflectance module |
| US8723467B2 (en) | 2004-05-06 | 2014-05-13 | Mechoshade Systems, Inc. | Automated shade control in connection with electrochromic glass |
| US10253564B2 (en) | 2004-05-06 | 2019-04-09 | Mechoshade Systems, Llc | Sky camera system for intelligent building control |
| US11187035B2 (en) | 2004-05-06 | 2021-11-30 | Mechoshade Systems, Llc | Sky camera virtual horizon mask and tracking solar disc |
| US8890456B2 (en) | 2004-05-06 | 2014-11-18 | Mechoshade Systems, Inc. | Automated shade control system utilizing brightness modeling |
| US8525462B2 (en) | 2005-03-08 | 2013-09-03 | Mechoshade Systems, Inc. | Automated shade control method and system |
| DE102005032550A1 (de) * | 2005-07-11 | 2007-01-18 | Elsner Elektronik Gmbh | Steuervorrichtung für Jalousien an Hochbauten |
| DE102006006138B4 (de) * | 2006-02-10 | 2009-03-26 | Abb Ag | Jalousieantrieb oder Rollladenantrieb oder Markisenantrieb oder Lichtbildwandantrieb |
| WO2012073161A1 (en) * | 2010-11-29 | 2012-06-07 | Koninklijke Philips Electronics N.V. | Control of lighting systems |
| US8892262B2 (en) | 2011-09-13 | 2014-11-18 | Qmotion Incorporated | Programmable wall station for automated window and door coverings |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4221640A1 (de) * | 1992-07-02 | 1994-01-05 | Microsonic Ges Fuer Mikroelekt | Elektrisches Steuergerät zur manuellen und zeitabhängigen Steuerung von elektrisch betriebenen Rolladen, Jalousien und Markisen |
| DE4407919A1 (de) * | 1994-03-09 | 1995-09-14 | Tornado Antriebstech Gmbh | Kompaktsystem zur Steuerung von Getriebeantrieben, insbesondere für Rolltore, Schwenktore, Fördersysteme und dergleichen |
| FR2754117B1 (fr) * | 1996-09-30 | 1998-11-27 | Somfy | Dispositif de commande pour moteur asynchrone de store ou volet roulant |
-
1999
- 1999-07-14 DE DE19932730A patent/DE19932730A1/de not_active Withdrawn
-
2000
- 2000-07-12 DE DE50012715T patent/DE50012715D1/de not_active Expired - Fee Related
- 2000-07-12 AT AT00114879T patent/ATE325934T1/de not_active IP Right Cessation
- 2000-07-12 EP EP00114879A patent/EP1069277B1/de not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| ATE325934T1 (de) | 2006-06-15 |
| EP1069277A3 (de) | 2003-06-18 |
| DE19932730A1 (de) | 2001-02-08 |
| DE50012715D1 (de) | 2006-06-14 |
| EP1069277A2 (de) | 2001-01-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1069277B1 (de) | Sonnenschutzanlage mit automatischer Behangsteuerung und manueller Eingriffsmöglichkeit | |
| EP1077378B1 (de) | Windmesser für Sonnenschutzanlage | |
| EP0552459B1 (de) | Sicherungsvorrichtung für Rolltore und dergleichen | |
| DE60312413T2 (de) | Motorisierte Fensterabdeckung und Verfahren zur Überwachung der Position einer motorisierten Fensterabdeckung | |
| EP0447849A1 (de) | Elektronische Rolladensteuerung | |
| DE4106033A1 (de) | Steuervorrichtung fuer sonnenschutzanlagen | |
| EP1904712B1 (de) | Steuervorrichtung für jalousien an hochbauten | |
| EP1069275A2 (de) | Sonnenschutzanlage mit sich dem Lichteinfall anpassender Behangeinstellung | |
| DE4407342C2 (de) | Verdunkelungsvorrichtung mit einer Markise, einer Außenjalousie o. dgl. | |
| DE4404682A1 (de) | Vorrichtung zur elektronischen Steuerung der Bewegungen einer Verdunkelungsvorrichtung | |
| DE29923046U1 (de) | Sensor für eine Verdunkelungsvorrichtung und Verdunkelungsanlage | |
| DE4315406C1 (de) | Vorrichtung zur automatischen Steuerung von Antrieben für insbesondere Rolläden, Jalousien o. dgl. | |
| DE4312613A1 (de) | Elektronischer Steuerbaustein zum Antrieb von Stellgliedern | |
| DE29924615U1 (de) | Sonnenschutzanlage mit sich dem Lichteinfall anpassender Behangeinstellung | |
| EP0659035B1 (de) | Verfahren zum Einstellen des Summenlichts in einem Raum und Vorrichtung zur Durchführung des Verfahrens | |
| WO2008015004A2 (de) | Sonnenuhr | |
| DE2405350B1 (de) | Steuerung einer elektromotorisch betaetigbaren Sonnenschutzanlage | |
| EP1083291B1 (de) | Elektrische Antriebsvorrichtung für Verdunkelungs-oder Beschattungsvorrichtung | |
| EP3314223B1 (de) | Vorrichtung und verfahren zur regelung des lichteinfalls | |
| DE102016123867B4 (de) | Vorrichtung zur Steuerung einer Verschattungseinrichtung eines Fensters | |
| DE4443733A1 (de) | Verfahren und Vorrichtung zur Steuerung einer Sonnenschutzeinrichtung | |
| EP1725081A2 (de) | Verfahren zur Einstellung von Helligkeitsschwellwerten bei Präsenzmeldern | |
| EP2186989A2 (de) | Motorsteuerung | |
| DE10142214B4 (de) | Verfahren und Anordnung zur Nachführung von sonnenbestrahlten Flächen entsprechend dem Stand der Sonne | |
| DE20000532U1 (de) | Vorrichtung zur Steuerung von elektromotorisch betriebenen Behängen |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Extension state: AL LT LV MK RO SI |
|
| 17P | Request for examination filed |
Effective date: 20031011 |
|
| AKX | Designation fees paid |
Designated state(s): AT CH DE LI |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT CH DE LI |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REF | Corresponds to: |
Ref document number: 50012715 Country of ref document: DE Date of ref document: 20060614 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: ISLER & PEDRAZZINI AG |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20070213 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PCAR Free format text: ISLER & PEDRAZZINI AG;POSTFACH 1772;8027 ZUERICH (CH) |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20090723 Year of fee payment: 10 Ref country code: CH Payment date: 20090727 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20090923 Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100731 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100731 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110201 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 50012715 Country of ref document: DE Effective date: 20110201 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100712 |