EP1024108A1 - Dispositif de contrôle de déplacement d'une structure portante d'engin roulant - Google Patents
Dispositif de contrôle de déplacement d'une structure portante d'engin roulant Download PDFInfo
- Publication number
- EP1024108A1 EP1024108A1 EP00400096A EP00400096A EP1024108A1 EP 1024108 A1 EP1024108 A1 EP 1024108A1 EP 00400096 A EP00400096 A EP 00400096A EP 00400096 A EP00400096 A EP 00400096A EP 1024108 A1 EP1024108 A1 EP 1024108A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- rotation
- axes
- axis
- axle
- machine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/065—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks non-masted
- B66F9/0655—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks non-masted with a telescopic boom
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mechanical Engineering (AREA)
- Body Structure For Vehicles (AREA)
- Vehicle Body Suspensions (AREA)
Abstract
Description
- les grues mobiles ;
- les chariots de manutention.
- d'un châssis ; et
- soit d'un mât d'inclinaison variable sur lequel coulissent tablier, porte-fourche et fourche, avec possibilité de rallonge et d'équipements divers tels que bennes, pelles, etc., fixés sur un porte-outils;
- soit d'une flèche télescopique supportant le porte-outils.
- deux biellettes articulées, à une première partie extrême haute, en rotation autour d'axes sensiblement parallèles, par rapport à la structure portante ou châssis de l'engin ;
- deux poutres sensiblement parallèles par rapport auxquelles les biellettes sont articulées en rotation, autour d'axes aux secondes parties extrêmes, basses, de ces biellettes;
- des moyens d'association desdites poutres audit essieu.
- l'engin comprend un bras de levage mobile en rotation autour d'un axe sensiblement horizontal;
- l'engin comprend des moyens d'entraínement disposés latéralement, le poste de pilotage étant placé à l'opposé des moyens d'entraínement;
- l'engin comprend au moins deux stabilisateurs solidaires du cadre rigide;
- l'engin comprend une structure porteuse en forme de poutre caisson, à la partie extrême avant de laquelle est placé le dispositif de contrôle de déplacement du cadre formant faux châssis par rapport à la poutre caisson;
- l'engin comporte un bras de levage télescopique, le dispositif de contrôle du déplacement du cadre formant faux châssis par rapport à la structure porteuse permettant en combinaison la correction de dévers et le déport latéral de la charge par le biais d'un seul mécanisme.
- les figures 1 à 16, prises successivement, représentent différentes étapes
possibles pour le montage d'un faux châssis à biellettes et stabilisateurs, à
l'avant d'un châssis de chariot automoteur,
- la figure 1 étant une vue de côté du châssis seul;
- la figure 2 étant une vue de face correspondant à la figure 1;
- la figure 3 étant une vue analogue à la figure 1, deux biellettes étant montées en partie avant du châssis;
- la figure 4 étant une vue de face correspondant à la figure 3;
- la figure 5 étant une vue analogue à la figure 3, après mise en place d'un faux châssis;
- la figure 6 étant une vue de face correspondant à la figure 5;
- la figure 7 étant une vue analogue à la figure 5, après mise en place du vérin de commande entre le faux châssis et la partie avant du châssis;
- la figure 8 étant une vue de face correspondant à la figure 7;
- la figure 9 étant une vue analogue à la figure 7, après mise en place du pont avant;
- la figure 10 étant une vue de face correspondant à la figure 9;
- la figure 11 étant une vue analogue à la figure 9, après mise en place des stabilisateurs, les stabilisateurs étant représentés en position baissée;
- la figure 12 étant une vue de face correspondant à al figure 11;
- la figure 13 étant une vue analogue à la figure 11, les stabilisateurs étant représentés en position levée;
- la figure 14 étant une vue de face correspondant à la figure 13;
- la figure 15 étant une vue en perspective correspondant aux figures 11 et 12, seule la partie avant du châssis étant représentée avec l'ensemble biellettes-faux châssis, vérin de commande, stabilisateurs;
- la figure 16 étant une vue en perspective éclatée correspondant à la figure 15;
- les figures 17 à 20 illustrent les capacités de déport latéral et de correction de
dévers induites par un dispositif selon l'invention,
- la figure 17 étant une vue en perspective correspondant à la figure 15, le dispositif selon l'invention étant dans une position de débattement maximum, dans la configuration considérée;
- la figure 18 étant une vue de face correspondant à la figure 17;
- la figure 19 étant une vue avant d'une machine de manutention, de type chariot automoteur à bras télescopique, le bras étant en position extrême relevée et télescopée, l'angle de débattement étant figuré pour la configuration du dispositif selon l'invention installé sur le chariot automoteur;
- la figure 20 étant une vue de dessus de la machine représentée en figure 19, le bras étant en position extrême télescopée et horizontal, l'angle de débattement dans cette position du bras étant figuré;
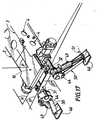
- la figure 21 est une vue en perspective faussée de la partie avant de la machine représentée en figures 19 et 20, le bras étant en position extrême abaissée et non télescopée, le vérin de commande reliant le châssis et le faux châssis n'étant pas figuré pour des raisons de lisibilité.
- elle désigne ici un ensemble de pièces mécaniques reliées directement au pont avant, pont avant qui est, dans l'art antérieur, conventionnellement rattaché au châssis par les éléments de suspension avant, d'où l'emploi du terme 〈〈châssis 〉〉;
- cet ensemble de pièces n'a pas pour fonction de supporter le moteur, la transmission et la carrosserie, à la manière d'un châssis, d'où au total, l'expression 〈〈faux châssis〉〉;
- cet ensemble de pièces peut être adapté sur un châssis traditionnel.
- deux parties latérales 24, optionnelles, d'articulation de stabilisateurs;
- un premier flasque 25 d'articulation des biellettes 17, 18, ce premier flasque 25 étant pourvu à cette fin de trous d'axe 26;
- un deuxième flasque 27 d'articulation de biellettes 17, 18, ce deuxième flasque
27 étant pourvu à cette fin de trous d'axe 28;
les axes 29, 30 définis par les trous d'axes 26, 28 étant parallèles et écartés d'une largeur l'inférieure à celle correspondant à l'écartement l des axes 8, 9 d'articulation supérieure des biellettes 17, 18.
- une plaque rigide 46 apte à être plaquée au sol, montée en rotation à l'extrémité 47 d'un piston 48 d'un ensemble piston-cylindre 49 tel qu'un vérin à double effet, hydraulique ou pneumatique;
- une pièce rigide ou bras 50 de section en U dont l'ouverture est en regard de l'ensemble piston-cylindre 49, le bras 50 étant mobile en rotation autour de l'axe 51 par rapport à la plaque 46.
Claims (15)
- Dispositif apte au contrôle du déplacement relatif de la structure portante d'un engin roulant par rapport à un essieu dudit engin, comprenant un cadre rigide solidaire dudit essieu, ce cadre rigide étant articulé à la structure portante de l'engin, des moyens de commande permettant la rotation du plan horizontal moyen de la structure portante de l'engin par rapport au plan horizontal moyen du cadre rigide solidaire dudit essieu, ledit essieu n'étant pas directement rattaché à la structure portante de l'engin, caractérisé en ce que le cadre rigide comprend:deux biellettes (17, 18) articulées, à une première partie extrême haute, en rotation autour d'axes (8, 9) sensiblement parallèles, par rapport à la structure portante ou châssis (1) de l'engin;deux poutres (31, 32) sensiblement parallèles par rapport auxquelles les biellettes (17, 18) sont articulées en rotation, autour d'axes (29, 30) aux secondes parties extrêmes, basses, de ces biellettes (17, 18);des moyens d'association desdites poutres (31, 32) audit essieu.
- Dispositif selon la revendication 1, caractérisé en ce que chaque biellette (17, 18) est pourvue d'un corps (19) à deux axes de rotation (20, 21) parallèles, chaque axe supérieur de rotation (20) correspondant à un axe (8, 9) et chaque axe inférieur de rotation (21) correspondant à un axe (29, 30).
- Dispositif selon l'une des revendications 1 et 2, caractérisé en ce que l'écartement des axes supérieur (8, 9) de rotation des biellettes est supérieur à l'écartement des axes inférieurs de rotation (29, 30) de ces biellettes (17, 18), ces biellettes (17, 18) étant inclinées d'un angle a ouvert vers le haut par rapport au plan médian P de la structure portante de l'engin, lorsque les deux plans définis par les axes supérieurs (8, 9) et inférieurs (29, 30) sont parallèles.
- Dispositif selon l'une des revendications 1 à 3, caractérisé en ce que l'angle α est compris entre quelques degrés et 30 degrés environ.
- Dispositif selon l'une quelconque des revendications 1 à 4, caractérisé en ce que les moyens de commande du déplacement du cadre rigide par rapport à la structure portante de l'engin comprennent un vérin unique (40) articulé en rotation autour d'un axe (13) sensiblement parallèle aux axes (8, 9) d'articulation haute des biellettes (17, 18), le vérin unique étant articulé en rotation autour d'un axe (39) inférieur sensiblement parallèle aux axes (29, 30) d'articulation basse des biellettes (17, 18).
- Dispositif selon la revendication 5, caractérisé en ce que le vérin (40) est incliné d'un angle β compris entre quelques degrés et 60 degrés par rapport au plan moyen de la structure portante, lorsque les deux plans définis par les axes (8, 9) d'articulation haute et (29, 30) d'articulation basse des biellettes sont parallèles.
- Dispositif selon l'une quelconque des revendications 1 à 6, caractérisé en ce qu'il est rapporté par assemblage sur une structure portante ou châssis conventionnel.
- Dispositif selon l'une quelconque des revendications 1 à 7, caractérisé en ce qu'il est disposé sur la partie extrême avant de la structure portante d'un engin roulant.
- Engin roulant, caractérisé en ce qu'il comprend au moins un dispositif tel que défini dans l'une quelconque des revendications 1 à 8.
- Engin roulant selon la revendication 9, caractérisé en ce qu'il comprend un pont avant et un pont arrière à roues motrices et directrices.
- Engin roulant selon la revendication 9 ou 10, caractérisé en ce qu'il comprend un bras de levage mobile en rotation autour d'un axe sensiblement horizontal (5).
- Engin roulant selon la revendication 11, caractérisé en ce qu'il comprend des moyens d'entraínement disposès latéralement, le poste de pilotage étant placé à l'opposé des moyens d'entraínement.
- Engin roulant selon l'une quelconque des revendications 9 à 12, caractérisé en ce qu'il comprend au moins deux stabilisateurs (45) solidaires du cadre rigide.
- Engin roulant selon l'une quelconque des revendications 9 à 13, caractérisé en ce qu'il comprend une structure porteuse en forme de poutre caisson, à la partie extrême avant de laquelle est placé le dispositif de contrôle de déplacement du cadre formant faux châssis par rapport à la poutre caisson.
- Engin roulant selon la revendication 14, caractérisé en ce qu'il comporte un bras de levage télescopique, le dispositif de contrôle du déplacement du cadre formant faux châssis par rapport à la structure porteuse permettant en combinaison la correction de dévers et le déport latéral de la charge par le biais d'un seul mécanisme.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR9900869A FR2788759B1 (fr) | 1999-01-27 | 1999-01-27 | Dispositif de controle de deplacement d'une structure portante d'engin roulant et engin roulant incorporant ledit dispositif |
| FR9900869 | 1999-01-27 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1024108A1 true EP1024108A1 (fr) | 2000-08-02 |
| EP1024108B1 EP1024108B1 (fr) | 2003-09-24 |
Family
ID=9541253
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20000400096 Expired - Lifetime EP1024108B1 (fr) | 1999-01-27 | 2000-01-14 | Dispositif de contrôle de déplacement d'une structure portante d'engin roulant |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP1024108B1 (fr) |
| DE (1) | DE60005415T2 (fr) |
| FR (1) | FR2788759B1 (fr) |
Citations (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3178046A (en) | 1962-04-04 | 1965-04-13 | Le Grand H Lull | Mobile loader with extendible boom |
| US3184086A (en) | 1963-05-15 | 1965-05-18 | Le Grand H Lull | High lift mobile loader |
| US3198359A (en) | 1963-01-29 | 1965-08-03 | Le Grand H Lull | Reaching type loader |
| US3270899A (en) | 1964-04-17 | 1966-09-06 | Baldwin Lima Hamilton Corp | Load handling vehicle |
| FR2091898A1 (fr) | 1970-04-09 | 1971-01-21 | Potain Sa | |
| US3670910A (en) | 1970-07-23 | 1972-06-20 | Donald George Shaw | Mobile load handling or lifting machines |
| US3688929A (en) | 1970-09-30 | 1972-09-05 | Skagit Corp | Lift truck with rotatable carriage |
| US3836025A (en) | 1973-05-21 | 1974-09-17 | Loed Corp | Material-handling machine |
| US3937339A (en) | 1971-10-29 | 1976-02-10 | Koehring Company | Vehicle having transverse leveling means |
| FR2287411A1 (fr) | 1974-10-12 | 1976-05-07 | Liner Concrete Machinery | Vehicule de manutention de charges |
| FR2287413A1 (fr) | 1974-10-12 | 1976-05-07 | Liner Concrete Machinery | Perfectionnements a des vehicules de manutention de charges |
| US3967744A (en) | 1975-02-18 | 1976-07-06 | Clark Equipment Company | Extensible reach load lifting mechanism |
| US3985248A (en) | 1974-09-25 | 1976-10-12 | Badger Dynamics, Inc. | Telescopic boom assembly |
| DE2739325A1 (de) | 1976-09-03 | 1978-03-09 | Loed Corp | Verladefahrzeug |
| DE2739537A1 (de) | 1976-09-03 | 1978-03-09 | Loed Corp | Schwenkgabelanordnung fuer verladeausruestungen |
| US4082197A (en) * | 1976-10-12 | 1978-04-04 | Caterpillar Tractor Co. | Articulated high lift vehicle |
| US4147263A (en) | 1977-01-06 | 1979-04-03 | Lull Engineering Company, Inc. | High lift loader with extended transfer |
| EP0036455A1 (fr) | 1980-03-18 | 1981-09-30 | Liner Limited | Véhicule pour le maniement de charges |
| FR2527992A3 (fr) | 1982-06-03 | 1983-12-09 | Merlo Ind Metalmecc | Vehicule a roues dont le chassis est mobile par rapport a l'un des essieux |
| FR2545468A1 (fr) | 1983-05-03 | 1984-11-09 | Koehring Co | Dispositif de montage de fourche sur un chariot elevateur a fourche et procede de dechargement employant un chariot elevateur a fourche comportant un tel dispositif |
| FR2563204A1 (fr) | 1984-04-23 | 1985-10-25 | Koehring Co | Accessoire pour chariot a fourche, et procede de dechargement utilisant cet accessoire |
| US4553899A (en) | 1983-11-16 | 1985-11-19 | Riccardo Magni | High lift truck with telescoping boom assemblies |
| US4632630A (en) | 1983-05-03 | 1986-12-30 | Koehring Company | Forklift attachment |
| US4674944A (en) | 1985-12-27 | 1987-06-23 | Kidde, Inc. | Forklift variable reach mechanism |
| US4679803A (en) | 1986-01-27 | 1987-07-14 | The United States Of America As Represented By The Secretary Of Agriculture | Apparatus for maintaining stability of mobile land vehicles on sloping terrain |
| US4744718A (en) | 1984-03-06 | 1988-05-17 | Gleason Cranes (Vic.) Pty. Ltd. | Aircraft service vehicle |
| WO1989000972A1 (fr) | 1987-07-27 | 1989-02-09 | Merlo S.P.A. Industria Metalmeccanica | Chariot elevateur a bras elevateur telescopique |
| US4822237A (en) | 1985-11-21 | 1989-04-18 | The Gradall Company | Extended reach materials handling apparatus |
| EP0312390A1 (fr) | 1987-10-15 | 1989-04-19 | J.C. Bamford Excavators Limited | Véhicule |
| EP0325064A1 (fr) | 1987-12-18 | 1989-07-26 | Manitou Bf | Amélioration à la stabilité des chariots élévateurs à bras télescopique |
| FR2640206A1 (fr) * | 1988-12-09 | 1990-06-15 | Bringuier Jean Marc | Vehicule du genre " tous terrains " pour prises de vues |
| US4964778A (en) | 1989-07-27 | 1990-10-23 | Kidde Industries, Inc. | Forklift truck having a telescopic auxiliary boom articulated to a telescopic main boom |
| EP0415608A2 (fr) | 1989-08-17 | 1991-03-06 | Eagle-Picher Industries, Inc. | Chariot élévateur à fourche avec un bras télescopique |
| US5106257A (en) | 1990-01-24 | 1992-04-21 | Manitou Bf | Lift truck with telescopic arm |
| EP0577388A2 (fr) | 1992-06-30 | 1994-01-05 | Caterpillar Inc. | Engin de chantier polyvalent |
| EP0656315A1 (fr) | 1993-12-01 | 1995-06-07 | Manitou Bf | Chariot élévateur à bras télescopique |
| EP0680923A1 (fr) | 1994-05-04 | 1995-11-08 | Caterpillar Inc. | Machine de travail |
| EP0681068A1 (fr) | 1994-05-04 | 1995-11-08 | Caterpillar Inc. | Véhicule de travail |
| US5478192A (en) | 1990-02-13 | 1995-12-26 | Tovel Manufacturing Limited | Boom operated fork truck |
| EP0692448A1 (fr) | 1994-07-15 | 1996-01-17 | J.C. Bamford Excavators Limited | Véhicule de manutention de matériel |
| EP0927698A1 (fr) | 1997-11-04 | 1999-07-07 | Karl Schaeff GmbH & Co. Maschinenfabrik | Appareil de travail sur roues mobile transversalement |
-
1999
- 1999-01-27 FR FR9900869A patent/FR2788759B1/fr not_active Expired - Lifetime
-
2000
- 2000-01-14 DE DE2000605415 patent/DE60005415T2/de not_active Expired - Lifetime
- 2000-01-14 EP EP20000400096 patent/EP1024108B1/fr not_active Expired - Lifetime
Patent Citations (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3178046A (en) | 1962-04-04 | 1965-04-13 | Le Grand H Lull | Mobile loader with extendible boom |
| US3198359A (en) | 1963-01-29 | 1965-08-03 | Le Grand H Lull | Reaching type loader |
| US3184086A (en) | 1963-05-15 | 1965-05-18 | Le Grand H Lull | High lift mobile loader |
| US3270899A (en) | 1964-04-17 | 1966-09-06 | Baldwin Lima Hamilton Corp | Load handling vehicle |
| FR2091898A1 (fr) | 1970-04-09 | 1971-01-21 | Potain Sa | |
| US3670910A (en) | 1970-07-23 | 1972-06-20 | Donald George Shaw | Mobile load handling or lifting machines |
| US3688929A (en) | 1970-09-30 | 1972-09-05 | Skagit Corp | Lift truck with rotatable carriage |
| US3937339A (en) | 1971-10-29 | 1976-02-10 | Koehring Company | Vehicle having transverse leveling means |
| US3836025A (en) | 1973-05-21 | 1974-09-17 | Loed Corp | Material-handling machine |
| US3985248A (en) | 1974-09-25 | 1976-10-12 | Badger Dynamics, Inc. | Telescopic boom assembly |
| FR2287413A1 (fr) | 1974-10-12 | 1976-05-07 | Liner Concrete Machinery | Perfectionnements a des vehicules de manutention de charges |
| FR2287411A1 (fr) | 1974-10-12 | 1976-05-07 | Liner Concrete Machinery | Vehicule de manutention de charges |
| US4034875A (en) | 1974-10-12 | 1977-07-12 | The Liner Concrete Machinery Company Limited | Load handling vehicle |
| US3967744A (en) | 1975-02-18 | 1976-07-06 | Clark Equipment Company | Extensible reach load lifting mechanism |
| DE2739325A1 (de) | 1976-09-03 | 1978-03-09 | Loed Corp | Verladefahrzeug |
| DE2739537A1 (de) | 1976-09-03 | 1978-03-09 | Loed Corp | Schwenkgabelanordnung fuer verladeausruestungen |
| US4082197A (en) * | 1976-10-12 | 1978-04-04 | Caterpillar Tractor Co. | Articulated high lift vehicle |
| US4147263A (en) | 1977-01-06 | 1979-04-03 | Lull Engineering Company, Inc. | High lift loader with extended transfer |
| EP0036455A1 (fr) | 1980-03-18 | 1981-09-30 | Liner Limited | Véhicule pour le maniement de charges |
| FR2527992A3 (fr) | 1982-06-03 | 1983-12-09 | Merlo Ind Metalmecc | Vehicule a roues dont le chassis est mobile par rapport a l'un des essieux |
| FR2545468A1 (fr) | 1983-05-03 | 1984-11-09 | Koehring Co | Dispositif de montage de fourche sur un chariot elevateur a fourche et procede de dechargement employant un chariot elevateur a fourche comportant un tel dispositif |
| US4632630A (en) | 1983-05-03 | 1986-12-30 | Koehring Company | Forklift attachment |
| US4553899A (en) | 1983-11-16 | 1985-11-19 | Riccardo Magni | High lift truck with telescoping boom assemblies |
| US4744718A (en) | 1984-03-06 | 1988-05-17 | Gleason Cranes (Vic.) Pty. Ltd. | Aircraft service vehicle |
| FR2563204A1 (fr) | 1984-04-23 | 1985-10-25 | Koehring Co | Accessoire pour chariot a fourche, et procede de dechargement utilisant cet accessoire |
| US4822237A (en) | 1985-11-21 | 1989-04-18 | The Gradall Company | Extended reach materials handling apparatus |
| US4674944A (en) | 1985-12-27 | 1987-06-23 | Kidde, Inc. | Forklift variable reach mechanism |
| EP0228208A1 (fr) | 1985-12-27 | 1987-07-08 | Kidde, Inc. | Chariot élévateur à mécanisme de portée variable |
| US4679803A (en) | 1986-01-27 | 1987-07-14 | The United States Of America As Represented By The Secretary Of Agriculture | Apparatus for maintaining stability of mobile land vehicles on sloping terrain |
| US5199861A (en) | 1987-07-27 | 1993-04-06 | Merlo S.P.A. Industria Metalmeccanica | Lifting truck with a telescopic lifting arm |
| WO1989000972A1 (fr) | 1987-07-27 | 1989-02-09 | Merlo S.P.A. Industria Metalmeccanica | Chariot elevateur a bras elevateur telescopique |
| EP0312390A1 (fr) | 1987-10-15 | 1989-04-19 | J.C. Bamford Excavators Limited | Véhicule |
| EP0325064A1 (fr) | 1987-12-18 | 1989-07-26 | Manitou Bf | Amélioration à la stabilité des chariots élévateurs à bras télescopique |
| FR2640206A1 (fr) * | 1988-12-09 | 1990-06-15 | Bringuier Jean Marc | Vehicule du genre " tous terrains " pour prises de vues |
| US4964778A (en) | 1989-07-27 | 1990-10-23 | Kidde Industries, Inc. | Forklift truck having a telescopic auxiliary boom articulated to a telescopic main boom |
| EP0415608A2 (fr) | 1989-08-17 | 1991-03-06 | Eagle-Picher Industries, Inc. | Chariot élévateur à fourche avec un bras télescopique |
| US5106257A (en) | 1990-01-24 | 1992-04-21 | Manitou Bf | Lift truck with telescopic arm |
| US5478192A (en) | 1990-02-13 | 1995-12-26 | Tovel Manufacturing Limited | Boom operated fork truck |
| EP0577388A2 (fr) | 1992-06-30 | 1994-01-05 | Caterpillar Inc. | Engin de chantier polyvalent |
| EP0656315A1 (fr) | 1993-12-01 | 1995-06-07 | Manitou Bf | Chariot élévateur à bras télescopique |
| FR2713155A1 (fr) | 1993-12-01 | 1995-06-09 | Manitou Bf | Chariot élévateur à bras télescopique. |
| EP0680923A1 (fr) | 1994-05-04 | 1995-11-08 | Caterpillar Inc. | Machine de travail |
| EP0681068A1 (fr) | 1994-05-04 | 1995-11-08 | Caterpillar Inc. | Véhicule de travail |
| EP0692448A1 (fr) | 1994-07-15 | 1996-01-17 | J.C. Bamford Excavators Limited | Véhicule de manutention de matériel |
| EP0927698A1 (fr) | 1997-11-04 | 1999-07-07 | Karl Schaeff GmbH & Co. Maschinenfabrik | Appareil de travail sur roues mobile transversalement |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1024108B1 (fr) | 2003-09-24 |
| DE60005415D1 (de) | 2003-10-30 |
| FR2788759A1 (fr) | 2000-07-28 |
| DE60005415T2 (de) | 2004-06-17 |
| FR2788759B1 (fr) | 2001-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1965630B1 (fr) | Engin agricole comportant un attelage perfectionne | |
| EP0046234B1 (fr) | Véhicule de manutention et de terrassement | |
| EP0100926B1 (fr) | Véhicule de manutention à bras orientable et châssis stabilisateur incorporé | |
| FR2528409A1 (fr) | Equipement complementaire sur grue automotrice a fleche telescopique | |
| EP1024108B1 (fr) | Dispositif de contrôle de déplacement d'une structure portante d'engin roulant | |
| WO1979001075A1 (fr) | Engin polyvalent de terrassement et de manutention | |
| EP1061034B1 (fr) | Chariot automoteur à bras télescopique et rehausse | |
| EP0152354B1 (fr) | Engin mobile comportant un dispositif de stabilisation | |
| EP0024265B2 (fr) | Véhicule à deux plates-formes superposées pour le transport de véhicules automobiles, avec plate-forme supérieure inclinable et abaissable | |
| EP0873964B1 (fr) | Dispositif de relevage de mât pour grue à tour télescopique | |
| FR2909366A1 (fr) | Engin de levage | |
| FR2747665A1 (fr) | Chariot elevateur a cadre relevable | |
| FR2759662A1 (fr) | Chassis de chariot elevateur, chariot elevateur comportant un tel chassis et procede de fabrication d'un tel chariot | |
| FR2536735A1 (fr) | Chariot de travail notamment pour la pose des vitres de toitures des serres agricoles | |
| EP1077196B1 (fr) | Dispositif de correction de dévers pour véhicule à deux essieux | |
| FR2534110A1 (fr) | Dispositif destine a supporter, au moins partiellement, le poids d'une machine agricole | |
| EP0919509A1 (fr) | Dispositif de manutention de conteneurs | |
| EP2910513A1 (fr) | Engin de levage avec réglage de garde au sol | |
| FR2461436A1 (fr) | Dispositif amovible de transport et de manoeuvre d'outil pouvant etre monte sur un tacteur | |
| EP0629160B1 (fr) | Dispositif pour vehicule de transport routier ou de manoeuvre et vehicule equipe d'un tel dispositif | |
| FR2774670A1 (fr) | Engin roulant mobile a portee variable et fleche orientable telescopique | |
| FR2645520A1 (fr) | Structure de levage telescopique pour un engin tel qu'une chargeuse | |
| EP1585699A1 (fr) | Vehicule de la manutention de materiaux | |
| EP1775157A1 (fr) | Ensemble de convoyage pour camion à benne | |
| FR2769872A1 (fr) | Suspension d'engins de levage a roues independantes motrices et directrices |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE FR GB IT |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| 17P | Request for examination filed |
Effective date: 20000919 |
|
| AKX | Designation fees paid |
Free format text: DE FR GB IT |
|
| 17Q | First examination report despatched |
Effective date: 20020802 |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: BOBCAT FRANCE SA |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE FR GB IT |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) | ||
| REF | Corresponds to: |
Ref document number: 60005415 Country of ref document: DE Date of ref document: 20031030 Kind code of ref document: P |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20040625 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 17 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 18 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 19 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20190121 Year of fee payment: 20 Ref country code: FR Payment date: 20190130 Year of fee payment: 20 Ref country code: GB Payment date: 20190130 Year of fee payment: 20 Ref country code: DE Payment date: 20190130 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 60005415 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: PE20 Expiry date: 20200113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20200113 |