EP0926976B1 - Bodenbearbeitungsmaschine - Google Patents
Bodenbearbeitungsmaschine Download PDFInfo
- Publication number
- EP0926976B1 EP0926976B1 EP98919160A EP98919160A EP0926976B1 EP 0926976 B1 EP0926976 B1 EP 0926976B1 EP 98919160 A EP98919160 A EP 98919160A EP 98919160 A EP98919160 A EP 98919160A EP 0926976 B1 EP0926976 B1 EP 0926976B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- ground
- treatment
- pivotable
- treatment machine
- wheel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4061—Steering means; Means for avoiding obstacles; Details related to the place where the driver is accommodated
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/29—Floor-scrubbing machines characterised by means for taking-up dirty liquid
- A47L11/30—Floor-scrubbing machines characterised by means for taking-up dirty liquid by suction
- A47L11/302—Floor-scrubbing machines characterised by means for taking-up dirty liquid by suction having rotary tools
- A47L11/305—Floor-scrubbing machines characterised by means for taking-up dirty liquid by suction having rotary tools the tools being disc brushes
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4044—Vacuuming or pick-up tools; Squeegees
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4072—Arrangement of castors or wheels
Definitions
- the invention relates to a tillage machine according to the preamble of claim 1.
- a generic tillage machine is for example known from DE 43 37 633 C2. She includes a non-circular tillage device Total working surface. As with such tillage machines is common to the tillage device a suction bar arranged afterwards, which is suspended on a holding arm, which by one vertical axis is pivotally mounted. The vertical Axle for the trailing and swivel-mounted The suction bar is located in the middle between the axes of rotation two main brushes.
- a scrubber drier is also from DE 91 15 713 U became known. It comprises two non-rotatable ones Wheels and a rotatable wheel offset from it as well as two offset to each other across the direction of travel horizontal plate brushes that work together with a suction brush. The plate brushes can be changed in position held.
- the present invention provides comparatively simple ones Funding improvements not previously thought possible.
- the tillage machine comprises a Soil cultivation device with non-circular cultivation area, for example in the form of two side by side arranged plate brushes. This tillage device is now pivotable about a vertical axis arranged.
- the processing device with the non-circular machining surface made of two next to each other in the direction of travel lying and oppositely drivable plate brushes exist for the present invention, that even when cornering the tillage machine this tillage body, for example in the form of Disc brushes each with their much larger overall transverse extent stay aligned to the direction of travel. This allows cornering when cornering and back out the floor with the processing body processed as broadly as possible and still fully processed or be cleaned.
- the swiveling processing device also an associated suction bar with swiveled, which optimally, for example, on the Soil applied water liquor can be sucked up.
- the squeegee can be used with the entire tillage device together in a fixed spatial assignment be pivoted or at least again in one small angular range suspended swinging relative to it his.
- a sibling solution has turned out to be special proven favorable when the tillage device with the at least one processing body also a Includes impeller, which with the tillage body is pivoted with. This impeller builds on that weight on him (from the chassis of the tillage machine) Lateral forces that define the rotation Let it run off and without the impeller sliding sideways or could slip away. If this is at least an impeller between the tillers of the tillage device and the squeegee that is relatively trailing is arranged, there is a particularly optimized Running behavior, because in the narrowest of spaces by sideways Swiveling the tillage machine the trailing squeegee can swing out to the side.
- the pivoting movement of the tillage device for example in the form of two adjacent plate brushes is preferably carried out via a trailing squeegee (especially if there is no additional pivoting one Impeller is provided), or via a pivotable Impeller, which together with the tillage device arranged pivotably and to the common vertical axis of rotation is aligned.
- a trailing squeegee especially if there is no additional pivoting one Impeller is provided
- a pivotable Impeller which together with the tillage device arranged pivotably and to the common vertical axis of rotation is aligned.
- a tillage machine is shown in the figures, usually a machine or housing body 1, a trailing control unit 3 and in Machine and housing body 1 comprises at least one motor, what about processing body 5a and 5b of a soil cultivation device 5 can be driven.
- a machine or housing body 1 usually a trailing control unit 3 and in Machine and housing body 1 comprises at least one motor, what about processing body 5a and 5b of a soil cultivation device 5 can be driven.
- the drive direction is usually such that in the forward direction 9 leading the plate brushes towards each other rotate.
- the two plate brushes shown in the exemplary embodiment 5a, 5b of the tillage device 5 can in one So-called.
- Brush box 12 can be housed, the two Disc brushes 5a, 5b essentially except for the area their drive axles 11 covered and above the ground 14 ends.
- the tillage machine comprises in the embodiment shown two rear non-steerable wheels 13 and a third, which can be swiveled forward Wheel 15, what the tillage implement held and is movable.
- the rear wheels 13 are on the underside of the tillage machine or the associated chassis supported and held.
- Soil cultivation device 5 is now vertical Axis of rotation 19 pivotable, the axis of rotation 19 at least indirectly on the machine or housing body 1 or pivotable on the associated chassis of the tillage machine is stored.
- the two are circular Tillage body 5a, 5b based on the Center longitudinal axis 21 of the tillage machine straight forward driving at the same height exactly next to each other.
- the two processing bodies 5a, 5b in the longitudinal direction of the Soil cultivation machine or at least in the direction of travel are slightly offset so that those of the Machining bodies 5a, 5b each covered area overlaps.
- A is firmly connected to the vertical axis of rotation 19 trailing arm 23 provided on the latter End in the central position attached to a suction bar 25 and is tracked.
- the suction bar 25 is on the fastening point 27 is firmly connected to the holding arm 23, so that the two tillage bodies 5a, 5b, the Holding arm 23 and the suction bar 25 a non-rotatable and jointly pivotable about the vertical axis of rotation 19 Form tillage device 5.
- the Holding arm 23 also supports the leading third wheel 15, between the two machining bodies 5a, 5b and the trailing squeegee 25.
- the leading Wheel 15 is opposite in the embodiment shown the holding arm 23 cannot be pivoted, but together with this rotatable about the vertical axis of rotation 19.
- the vertical axis of rotation 19 lies in the central longitudinal plane or intersects the vertical central longitudinal axis 21 of the tillage machine, preferably at the intersection between the the two drive axles 11 of the two machining bodies 5a, 5b connecting line and the central longitudinal axis 21.
- the tillage body is preferred in or on the area 5a, 5b via a not shown Line liquid, especially cleaning liquid, fed to the plate brushes, for example immediately in front of the plate brushes in the forward direction or on trickling the plate brushes or through the central axis through into the central area of the plate brushes, whereby a trailing liquid film to be taken up again from the floor, hereinafter also called water fleet 29 which is due to the trailing squeegee Aspirated floor and over a not shown Suction hose to a in the tillage machine, i.e. in the machine and housing body 1 Suction device is transported.
- a not shown Line liquid especially cleaning liquid
- the plate brushes for example immediately in front of the plate brushes in the forward direction or on trickling the plate brushes or through the central axis through into the central area of the plate brushes, whereby a trailing liquid film to be taken up again from the floor, hereinafter also called water fleet 29 which is due to the trailing squeegee Aspirated floor and over a not shown Su
- the suction bar 25 has thereby a width that is preferably at least slightly is wider than the maximum width of the entire machining body 5a and 5b. In the embodiment shown the suction bar 25 is slightly wider than the overall width the tillage machine.
- the rear Control unit 3 (which, for example, is transverse to the processing device extending handle bar includes) corresponding pressure to the left or right so exerted be that the front wheel 15 (which is opposite the vertical axis of rotation 19 but is arranged trailing) pivoted about this vertical axis of rotation 19 accordingly becomes.
- the entire tillage system is equally used 5 with the two tillage bodies 5a, 5b, the rotating front wheel 15 and the trailing squeegee 25 together around the common vertical axis of rotation 19 pivoted so that even Cornering the ground with the maximum width the processing body 5a and 5b processed and cleaned can be.
- the main weight is in the embodiment shown for example a weight of 500 N compared to a support weight of 300 N in the area of the brushes also that the respective roll-off point 33 at the leading Wheel 15 the point of application for pivoting the tillage device 5 is.
- the soil cultivation device can be used to clean corners staying in almost the same place their leading area are pivoted to the left so with a left swiveling the leading one vertical axis of rotation 19 with the entire tillage machine is taken to the left.
- the front wheel 33 will remain in alignment almost at the same place pivoted to the axis of rotation 19 to the left, whereby the entire tillage device 5 and the vertical Axis of rotation 19 the desired pivoting movement to the left performs.
- the arrangement can be such that the tillage device 5 around the vertical axis of rotation 19 um Can be rotated back and forth 360 °.
- the structure explained does not only make it an optimal one Tillage with the maximum width of the adjacent plate brushes 5a, 5b achieved, but also also ensured that the squeegee each in the immediately trailing area next to the two lying processing bodies 5a, 5b tracked to optimally absorb the water fleet.
- the steerable mentioned front impeller 15 not necessarily between the plate brushes and the squeegee, but also in trailing Direction can be arranged behind the squeegee. Indeed This results in a slightly different kinematics. With the wheel 15 trailing, the pivoting movement takes place slower or less dynamic. Because with an between the leading brush devices 5a, 5b and trailing suction bar 25 arranged impeller 15 this has the consequence that in one by the roll-off point 33 in Impeller 13 placed coordinate system when pivoting the vertical axis of rotation 19 on one side and the attachment point 27 for the suction bar 25 opposite lie on the other side of the impeller 33 and be pivoted about the support point 33.
- One increasingly extreme swiveling out of the suction bar 25 at already low front offset of the tillage machine is achieved when the impeller 33 and its Roll-off point increasingly closer to the vertical axis of rotation 19 come to rest.
- a pivoting of the brush box 12 with the brush device 5a, 5b is basically together with the Suction bar 25, but also without using the pivoting movement promotional impeller 13 possible.
- Words can be a or if there is enough space several wheels 13 also directly on the chassis of the tillage machine steerably attached when a collision avoided with the suction bar and the plate brushes can be.
- driver's seat machine As is basically the case reproduced in the representations according to Figures 5 to 7 is. It is possible that the steering wheel Driver seat machine connects to the vertical Axis of rotation 19, so that the operator on the Steering wheel controls the driver seat machine accordingly steered and thus forcibly the tillage device 5 pivoted with the trailing squeegee 25 and is adjusted.
- FIG 5 is the extension of a schematic Steering wheel rod 41 shown, for example, over two Toothed belt pulleys 43 and 45 and one rotating over it Toothed belt 47 with the tillage device 5 in Steering connection is in place.
- the swiveling wheel 15 adjusted to the left and right according to the direction of travel.
- the vertical adjustment axis 19 is laid here that it cuts the pivotable wheel 15 vertically and passes through the rolling point 33 of the pivotable wheel 15.
- the steerable wheel over an unspecified Drive mechanism for driving the device can be driven unless the rear wheels are driven.
- the tillage bodies are 5a, 5b together with the pivotable Wheel 15 and the suction bar 25 as a common brush and Suction unit pivoted, whereby, as stated, this unit also with a drive unit for the swiveling Wheel 15 can be connected.
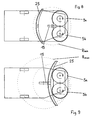
- This also defines the width of the suction bar 25 in order to optimally absorb the liquid film over the entire suction width even during a pivoting process.
- FIG. 9 there is a larger swivel radius R max .
- R max the width of the suction bar 25 must be chosen larger.
- the first-mentioned exemplary embodiment according to FIG. 8 thus has more favorable conditions, since the smaller, i.e. narrower, suction strip used results in a minimum passage width in the case of obstacles, and, moreover, the suction power itself is greater since, with the same suction energy of a suction motor, only a smaller one Surface must be vacuumed.
- machining bodies 5a, 5b can be, for example, a plate brush and a cooperating revolving sweep belt or, for example a transverse sweeping belt or for example two slightly V-shaped sweeping straps, one or more rollers, one or more polishing plates etc., with polishing plates mostly cleaned dry is, so does not have to be suctioned off. Possibly could instead of a squeegee one without a suction device provided cleaning strip can also be arranged.
- a roller brush 5c can also be used, which are aligned transversely to the vehicle's longitudinal axis when driving straight ahead and about a horizontal axis of rotation 11 ' rotates.
- the wheel can of course run in front or behind to be built in.
- the suction bar 25 on the holding arm 23, for example at the attachment point 27 shown there, must not be firmly anchored and held, but that the attachment point 27 also formed as a pendulum axis can be about this at least in a small angular range an additional pendulum movement of the squeegee relative to enable the holding arm 23.
- the attachment point, which is also designed as a pendulum axis can be, but can also be much further ahead be provided on the holding arm 23, possibly even lying very close to the vertical axis of rotation 19.
Landscapes
- Soil Working Implements (AREA)
- Agricultural Machines (AREA)
- Centrifugal Separators (AREA)
- Vehicle Waterproofing, Decoration, And Sanitation Devices (AREA)
- Threshing Machine Elements (AREA)
- Finish Polishing, Edge Sharpening, And Grinding By Specific Grinding Devices (AREA)
Description
- Figur 1 :
- eine schematische Seitenansicht einer erfindungsgemäßen Bodenbearbeitungsmaschine;
- Figur 2 :
- eine schematische Horizontalschnittdarstellung etwa in Höhe der Räder des Bearbeitungsgerätes;
- Figur 3 :
- eine zu Figur 2 entsprechende Schnittdarstellung bei 90°-Kurvenfahrt nach links;
- Figur 4 :
- eine weitere entsprechende Schnittansicht bei Rückwärtsfahrt;
- Figur 5 bis 7:
- eine zu den Figuren 1 bis 3 wiedergegebene Abwandlung für eine Fahrersitzmaschine, eine sog. Aufsitzmaschine;
- Figur 8 und 9:
- eine zu Figur 2 vergleichbare Darstellung zur Verdeutlichung der Kinematik, wenn das die Drehbewegung einleitende Rad gemäß Figur 8 vor der Saugleiste und gemäß Figur 9 nach der Saugleiste angeordnet ist;
- Figur 10 :
- eine schematische Seitendarstellung eines abgewandelten Ausführungsbeispieles unter Verwendung einer Walzenbürste; und
- Figur 11 :
- eine Draufsicht auf einen horizontalen Querschnitt durch das Ausführungsbeispiel gemäß Figur 11 in Höhe der horizontalen Rotationsachse der Walzenbürste.
Claims (24)
- Bodenbearbeitungsmaschine mit einer antreibbaren Bodenbearbeitungseinrichtung (5), welche zumindest einen Bearbeitungskörper (5a, 5b, 5c) für eine nicht kreisförmige Bearbeitungsfläche und zumindest ein verschwenkbares Rad (15) umfaßt, und vorzugsweise mit einer nachlaufenden Saugleiste (25'), die um eine vertikale Achse, bezogen auf die Bodenbearbeitungsmaschine, verschwenkbar ist, dadurch gekennzeichnet, dass die Bodenbearbeitungseinrichtung (5) eine nicht kreisförmige Bearbeitungsfläche beschreibt, deren dadurch definierte Breitenerstreckung quer zur Fahrtrichtung ausgerichtet ist, und dass die Bodenbearbeitungseinrichtung (5) in Abhängigkeit von der jeweiligen Fahrrichtung um eine vertikale Drehachse (19) gegenüber dem Maschinenkörper (1) so schwenkbar ist, dass die bei Geradeausfahrt vorgegebene Breitenerstreckung des Bearbeitungskörpers (5) quer zur Fahrtrichtung auch bei Kurvenfahrt jeweils quer zur aktuellen Fahrtrichtung des zumindest einen verschwenkbaren Rades (15) ausgerichtet erhalten bleibt.
- Bodenbearbeitungsmaschine nach Anspruch 1, dadurch gekennzeichnet, daß mit der Bodenbearbeitungseinrichtung (3) auch die zu dem zumindest einen Bodenbearbeitungskörper (5a, 5b, 5c) nachlaufend angeordnete Saugleiste (25) um die gemeinsame vertikale Drehachse (19) gemeinsam mit verschwenkbar ist.
- Bodenbearbeitungsmaschine nach Anspruch 1 oder 2, dadurch gekennzeichnet, daß ferner noch ein verschwenkbares Rad (15) vorgesehen ist, das zu der Bodenbearbeitungseinrichtung (5) nachlaufend angeordnet und um die vertikale Drehachse (19) gegenüber dem Maschinenkörper (1) verschwenkbar ist, und daß das verschwenkbare Rad (15) als Einheit mit der Bodenbearbeitungseinrichtung (5) und/oder einer zur Bodenbearbeitungseinrichtung (5) nachlaufend angeordneten Saugleiste (25) um die gemeinsame vertikale Drehachse (19) verschwenkbar ist.
- Bodenbearbeitungsmaschine nach Anspruch 3, dadurch gekennzeichnet, daß in Draufsicht auf die Bodenfläche der Abrollpunkt (33) des verschwenkbaren Rades (15) zu der vertikalen Drehachse (19) nachlaufend versetzt liegt.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, daß die vertikale Drehachse (19) die Bodenfläche im Abrollpunkt (33) des verschwenkbaren Rades (15) schneidet.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 5, dadurch gekennzeichnet, daß das verschwenkbare Rad (15) und damit dessen Abrollpunkt (33) in Draufsicht auf die Bodenbearbeitungsmaschine zwischen dem zumindest einen Bearbeitungskörper (5; 5a, 5b, 5c) und der dazu nachlaufenden Saugleiste (25) liegt.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bic 5, dadurch gekennzeichnet, daß das verschwenkbare Rad (15) und damit dessen Abrollpunkt (33) in Draufsicht auf die Bodenbearbeitungsmaschine so angeordnet ist, daß die Saugleiste (25) zwischen dem zumindest einen Bodenbearbeitungskörper (5, 5a, 5b, 5c) oder der vertikalen Drehachse (19) und dem Rad (15) zu liegen kommt.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 7, dadurch gekennzeichnet, daß die vertikale Drehachse (19) zumindest in etwa in der vertikalen Mittellängs-Ebene (21) der Bodenbearbeitungsmaschine liegt, und zwar im vorlaufenden Bereich der Bodenbearbeitungsmaschine.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 8, dadurch gekennzeichnet, daß die vertikale Drehachse (19) zwischen den beiden Antriebsachsen (11) zweier Bearbeitungskörper (5a, 5b) angeordnet ist, die bezogen auf die Fahrtrichtung mit Querversatz zueinander angeordnet sind.
- Bodenbearbeitungsmaschine nach Anspruch 8, dadurch gekennzeichnet, daß die vertikale Drehachse (19) bezogen auf die Bodenbearbeitungseinrichtung (5) zumindest geringfügig vor- oder nachlaufend versetzt liegt.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 10, dadurch gekennzeichnet, daß die Bodenbearbeitungseinrichtung (5) zumindest zwei Bearbeitungskörper (5a, 5b), vorzugsweise in Form von Tellerbürsten umfaßt, die bezogen auf die Mittellängsebene (21) der Bodenbearbeitungsmaschine mit zumindest geringem Versatz in Längsrichtung der Bodenbearbeitungsmaschine zum einen und in Querrichtung dazu zum anderen so angeordnet sind, daß sich in Fahrtrichtung eine überlappende Bearbeitungsfläche ergibt.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 10, dadurch gekennzeichnet, daß die Bodenbearbeitungseinrichtung (5) aus einer bei Geradeausfahrt quer zur vertikalen Mittellängsebene (21) aus gerichtet verlaufenden und um eine horizontale Rotationsachse drehenden Walzenbürste (5c) besteht.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 12, dadurch gekennzeichnet, daß die Saugleiste (25) um die vertikale Drehachse (19) und zusätzlich zumindest in einem kleinen Winkelbereich um eine dazu versetzt, aber parallel liegende Pendelachse (27a) verschwenkbar ist.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 13, dadurch gekennzeichnet, daß die Verschwenkbewegung der Bodenbearbeitungseinrichtung (5) in Abhängigkeit der nachlaufenden Saugleiste (25) erfolgt.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 14, dadurch gekennzeichnet, daß die Verschwenkbewegung der Bodenbearbeitungseinrichtung (5) in Abhängigkeit der Relativlage des nachlaufenden Rades (15) zur vertikalen Drehachse (19) erfolgt.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 14, dadurch gekennzeichnet, daß das verschwenkbare Rad (15) mit einem höheren Druck als die Bearbeitungskörper (5a, 5b) belastet ist.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 18, dadurch gekennzeichnet, daß die Saugleiste (25) und das Rad (15) an einem um die vertikale Drehachse (19) verschwenkbaren Haltearm (23) gemeinsam verschwenkbar gehalten und abgestützt sind.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 17, dadurch gekennzeichnet, daß das zumindest eine um die vertikale Drehachse (19) verschwenkbare Rad (15) gemeinsam mit den weiteren am Chassis zumindest mittelbar angebrachten Rädern (13) das Gewicht der Bodenbearbeitungsmaschine aufnimmt.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 18, dadurch gekennzeichnet, daß diese als Fahrersitzmaschine ausgebildet ist und die vertikale Drehachse (19) mit einer Fahrzeug-Lenkeinrichtung, insbesondere dem Lenkrad, gekoppelt oder um eine dazu parallele Achse verschwenkbar ist.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 19, dadurch gekennzeichnet, daß die Bodenbearbeitungseinrichtung (5) gemeinsam mit einem Stützrad (15) mit einer fahrerseitigen Lenkeinrichtung gekoppelt und hierüber verschwenkbar ist.
- Bodenbearbeitungsmaschine nach Anspruch 19 oder 20, dadurch gekennzeichnet, daß über die fahrerseitige Lenkeinrichtung neben der Bodenbearbeitungseinrichtung (5) und dem Stützrad (15) gemeinsam auch die dazu nachlaufende Saugleiste (25) mit verschwenkbar ist.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 21, dadurch gekennzeichnet, daß zumindest zwei die Kurvenfahrt der Bodenbearbeitungsmaschine ermöglichende quer zur Mittellängsachse versetzt liegende Räder (15) vorgesehen sind.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 22, dadurch gekennzeichnet, daß der Antrieb des zumindest einen Rades (15) unmittelbar an dem Rad (15) selbst oder an der das Rad tragenden und mitverschwenkbaren Trägereinrichtung montiert ist.
- Bodenbearbeitungsmaschine nach einem der Ansprüche 1 bis 12, dadurch gekennzeichnet, daß zumindest zwei vorlaufende Räder (15) vorgesehen sind, worüber die Lenkbewegung der Bodenbearbeitungsmaschine durchführbar ist, wobei die beiden seitlich versetzt zueinander liegenden Räder (15) an einer Verbindungseinrichtung gehalten und abgestützt sind, die um die gemeinsame vertikale Verdrehachse (19) verschwenkbar sind.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE19713123A DE19713123C1 (de) | 1997-03-27 | 1997-03-27 | Bodenbearbeitungsmaschine |
| DE19713123 | 1997-03-27 | ||
| PCT/EP1998/001790 WO1998043527A1 (de) | 1997-03-27 | 1998-03-26 | Bodenbearbeitungsmaschine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0926976A1 EP0926976A1 (de) | 1999-07-07 |
| EP0926976B1 true EP0926976B1 (de) | 2004-10-13 |
Family
ID=7824937
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP98919160A Expired - Lifetime EP0926976B1 (de) | 1997-03-27 | 1998-03-26 | Bodenbearbeitungsmaschine |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US6163923A (de) |
| EP (1) | EP0926976B1 (de) |
| JP (1) | JP2000512190A (de) |
| AT (1) | ATE279142T1 (de) |
| DE (2) | DE19713123C1 (de) |
| WO (1) | WO1998043527A1 (de) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013064182A1 (de) | 2011-11-02 | 2013-05-10 | Alfred Kärcher Gmbh & Co. Kg | Handgeführte bodenreinigungsmaschine |
| WO2013064179A1 (de) | 2011-11-02 | 2013-05-10 | Alfred Kärcher Gmbh & Co. Kg | Handgeführte bodenreinigungsmaschine |
| WO2019162355A1 (de) | 2018-02-21 | 2019-08-29 | Hefter Cleantech Gmbh | Bodenbearbeitungsmaschine, insbesondere bodenreinigungsmaschine |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19959440C2 (de) * | 1999-12-09 | 2001-12-13 | Georg Hefter Maschb | Verfahrbarer Wagen, insbesondere Arbeits- oder Bodenreinigungsmaschine |
| US6792648B2 (en) * | 2000-03-28 | 2004-09-21 | Samsung Kwangju Electronics Co., Ltd. | Floor cloth for use in vacuum cleaner and apparatus of vacuum cleaner for rotatably driving the floor cloth |
| AU2002301415B2 (en) * | 2001-10-12 | 2007-10-04 | Karcher North America, Inc. | Scrubbing machine passive recycling |
| US7640622B2 (en) * | 2004-04-21 | 2010-01-05 | Vankouwenberg Raymond E | Floor surface cleaning and resurfacing equipment |
| DE602007011253D1 (de) * | 2007-08-02 | 2011-01-27 | Comac S P A | Bodenreinigungsmaschine |
| US8001651B2 (en) * | 2008-06-19 | 2011-08-23 | National Taipei University Of Technology | Floor washing robot |
| JP2010022679A (ja) * | 2008-07-23 | 2010-02-04 | Re-Products Co Ltd | 床面洗浄機及び払拭治具 |
| DE102009014560A1 (de) * | 2009-03-16 | 2010-09-23 | Alfred Kärcher Gmbh & Co. Kg | Auswechselbare Kehrbürsteneinrichtung und Kehrmaschine mit einer derartigen Kehrbürsteneinrichtung |
| DK2408972T3 (da) | 2009-03-17 | 2013-03-04 | Kaercher Gmbh & Co Kg Alfred | Selvkørende fejemaskine |
| DK2248455T3 (da) * | 2009-05-08 | 2012-08-13 | Wetrok Ag | Gulvrengøringsmaskine |
| US8966693B2 (en) | 2009-08-05 | 2015-03-03 | Karcher N. America, Inc. | Method and apparatus for extended use of cleaning fluid in a floor cleaning machine |
| DE202011004106U1 (de) | 2011-03-17 | 2012-06-25 | HEFTER Maschinenbau GmbH & Co. KG | Bodenbearbeitungseinrichtung zur Reinigung eines Untergrunds |
| CN102835938A (zh) * | 2011-06-24 | 2012-12-26 | 广东白云清洁科技有限公司 | 一种洗地车水刮安装结构 |
| CN104968247A (zh) * | 2012-10-30 | 2015-10-07 | 威托克股份公司 | 地板清洁装置 |
| DK2941996T3 (en) * | 2014-05-05 | 2017-06-26 | Fimap S P A | Floor cleaning machine |
| US10368709B2 (en) * | 2014-10-02 | 2019-08-06 | Diversey, Inc. | Floor cleaning apparatus with offset cleaning unit |
| KR101640198B1 (ko) * | 2015-04-16 | 2016-07-18 | 주식회사 보흥클레온 | 탑승식 바닥세척기 |
| US20200121150A1 (en) * | 2018-10-17 | 2020-04-23 | Kärcher North America, Inc. | Wheel propelled steerable floor cleaning machine |
| USD1016416S1 (en) | 2022-02-14 | 2024-02-27 | Karcher North America, Inc. | Floor cleaning machine |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4173056A (en) * | 1978-06-26 | 1979-11-06 | Tennant Company | Scrubbing machine with tracking squeegee |
| US4317252A (en) * | 1980-07-14 | 1982-03-02 | The Scott & Fetzer Company | Sweeper-scrubber |
| US4492002A (en) * | 1980-09-12 | 1985-01-08 | Wetrok, Inc. | Floor cleaning machine |
| US4854005A (en) * | 1988-11-03 | 1989-08-08 | Wiese Martin E | Automatic floor scrubbing machine with squeegee assembly and adjustable wheels |
| DE4103087C1 (en) * | 1991-02-01 | 1992-04-23 | Kurt 8122 Penzberg De Zachhuber | Scrubbing vacuum cleaner with following auxiliary brush - has scrapingstrips returning residual liq. from latter to suction mouth |
| ATE113450T1 (de) * | 1991-02-01 | 1994-11-15 | Kurt Zachhuber | Bodenbearbeitungsmaschine. |
| DE4118708C1 (de) * | 1991-06-07 | 1992-08-20 | Zachhuber Kurt | |
| US5265300A (en) * | 1992-01-13 | 1993-11-30 | Aar Corp. | Floor scrubber |
| JP3039152B2 (ja) * | 1992-08-18 | 2000-05-08 | ブラザー工業株式会社 | 自動エミュレーション切換え機能付き印字装置 |
| DE4337633C2 (de) * | 1993-11-05 | 1996-05-23 | Hefter Maschinenbau | Bodenbearbeitungsmaschine |
| US5742966A (en) * | 1994-10-05 | 1998-04-28 | Tono; Gianni | Floor-cleaning machine provided with movable brushes and dragging disc |
| ATE196597T1 (de) * | 1996-04-11 | 2000-10-15 | Nilfisk Advance Italia Spa | Saughaube für fussboden-nassreinigungsmaschinen |
| US5623743A (en) * | 1996-06-04 | 1997-04-29 | Clarke Industries, Inc. | Mobile surface scrubber solution recovery system |
-
1997
- 1997-03-27 DE DE19713123A patent/DE19713123C1/de not_active Expired - Fee Related
-
1998
- 1998-03-26 EP EP98919160A patent/EP0926976B1/de not_active Expired - Lifetime
- 1998-03-26 WO PCT/EP1998/001790 patent/WO1998043527A1/de active IP Right Grant
- 1998-03-26 DE DE1998512114 patent/DE59812114D1/de not_active Expired - Lifetime
- 1998-03-26 AT AT98919160T patent/ATE279142T1/de active
- 1998-03-26 US US09/194,187 patent/US6163923A/en not_active Expired - Lifetime
- 1998-03-26 JP JP10541137A patent/JP2000512190A/ja active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013064182A1 (de) | 2011-11-02 | 2013-05-10 | Alfred Kärcher Gmbh & Co. Kg | Handgeführte bodenreinigungsmaschine |
| WO2013064179A1 (de) | 2011-11-02 | 2013-05-10 | Alfred Kärcher Gmbh & Co. Kg | Handgeführte bodenreinigungsmaschine |
| WO2019162355A1 (de) | 2018-02-21 | 2019-08-29 | Hefter Cleantech Gmbh | Bodenbearbeitungsmaschine, insbesondere bodenreinigungsmaschine |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000512190A (ja) | 2000-09-19 |
| WO1998043527A1 (de) | 1998-10-08 |
| DE19713123C1 (de) | 1998-10-29 |
| DE59812114D1 (de) | 2004-11-18 |
| EP0926976A1 (de) | 1999-07-07 |
| ATE279142T1 (de) | 2004-10-15 |
| US6163923A (en) | 2000-12-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0926976B1 (de) | Bodenbearbeitungsmaschine | |
| DE69500370T2 (de) | Führbare seitliche Saugfüsse | |
| DE602004002288T2 (de) | Fussbodenreinigungsmaschine | |
| DE1949978B2 (de) | Landwirtschaftliches kraftfahrzeug, insbesondere schlepper | |
| DE2460584C3 (de) | Kehrmaschine | |
| WO2013064182A1 (de) | Handgeführte bodenreinigungsmaschine | |
| EP3955792A1 (de) | Reinigungsmaschine mit gelenkeinrichtung und reinigungsmaschine mit antriebseinrichtung | |
| DE10113702B4 (de) | Strandreinigungsfahrzeug mit einem Fahrzeugrahmen | |
| DE102010011418B4 (de) | Vorrichtung, System und Verfahren zum Nassreinigen von Kunstrasen | |
| DE102012101109B4 (de) | Geräteträger für Reinigungsgeräte mit Mittenantrieb zum Frontanbau | |
| DE3604053C2 (de) | ||
| EP2773253B1 (de) | Handgeführte bodenreinigungsmaschine | |
| DE69403511T2 (de) | Heuwerbungsmaschine | |
| EP0460288B1 (de) | Heuwerbungsmaschine | |
| WO1995028076A1 (de) | Bodenbearbeitungsgerät | |
| DE10305611B4 (de) | Bodenreinigungsmaschine | |
| DE60004040T2 (de) | Zugeinrichtung für ein landwirdschaftliches gerät | |
| DE1966495A1 (de) | Schlepper | |
| DE69813336T2 (de) | Heuwerbungsmaschine | |
| EP1424448A1 (de) | Kehrfahrzeug und Verfahren zu dessen Betrieb | |
| DE10221353B4 (de) | Bodenreinigungsmaschine | |
| AT522728B1 (de) | Einachsige Vorrichtung | |
| EP1081288B1 (de) | Kehrmaschine | |
| DE1235057B (de) | Heuwerbungsmaschine mit paarweise quer zur Fahrtrichtung nebeneinander angeordneten Kreiseln | |
| EP2091315B1 (de) | Bodenbearbeitungsgerät mit grosser arbeitsbreite |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 19981112 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT CH DE FR GB IT LI NL |
|
| 17Q | First examination report despatched |
Effective date: 20020812 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT CH DE FR GB IT LI NL |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REF | Corresponds to: |
Ref document number: 59812114 Country of ref document: DE Date of ref document: 20041118 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: SCHMAUDER & PARTNER AG PATENTANWALTSBUERO |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20050115 |
|
| ET | Fr: translation filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20050714 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PCAR Free format text: SCHMAUDER & PARTNER AG PATENT- UND MARKENANWAELTE VSP;ZWAENGIWEG 7;8038 ZUERICH (CH) |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 19 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20170323 Year of fee payment: 20 Ref country code: DE Payment date: 20170327 Year of fee payment: 20 Ref country code: NL Payment date: 20170323 Year of fee payment: 20 Ref country code: CH Payment date: 20170327 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20170327 Year of fee payment: 20 Ref country code: AT Payment date: 20170322 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20170323 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 59812114 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MK Effective date: 20180325 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: PE20 Expiry date: 20180325 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20180325 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK07 Ref document number: 279142 Country of ref document: AT Kind code of ref document: T Effective date: 20180326 |