EP0914879A1 - Procédé et machine pour le cintrage automatique de tÔles métalliques - Google Patents
Procédé et machine pour le cintrage automatique de tÔles métalliques Download PDFInfo
- Publication number
- EP0914879A1 EP0914879A1 EP98119190A EP98119190A EP0914879A1 EP 0914879 A1 EP0914879 A1 EP 0914879A1 EP 98119190 A EP98119190 A EP 98119190A EP 98119190 A EP98119190 A EP 98119190A EP 0914879 A1 EP0914879 A1 EP 0914879A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- manipulator
- bending
- sheet
- metal sheet
- press
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D—WORKING OR PROCESSING OF SHEET METAL OR METAL TUBES, RODS OR PROFILES WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D43/00—Feeding, positioning or storing devices combined with, or arranged in, or specially adapted for use in connection with, apparatus for working or processing sheet metal, metal tubes or metal profiles; Associations therewith of cutting devices
- B21D43/02—Advancing work in relation to the stroke of the die or tool
- B21D43/026—Combination of two or more feeding devices provided for in B21D43/04 - B21D43/18
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D—WORKING OR PROCESSING OF SHEET METAL OR METAL TUBES, RODS OR PROFILES WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D43/00—Feeding, positioning or storing devices combined with, or arranged in, or specially adapted for use in connection with, apparatus for working or processing sheet metal, metal tubes or metal profiles; Associations therewith of cutting devices
- B21D43/02—Advancing work in relation to the stroke of the die or tool
- B21D43/04—Advancing work in relation to the stroke of the die or tool by means in mechanical engagement with the work
- B21D43/10—Advancing work in relation to the stroke of the die or tool by means in mechanical engagement with the work by grippers
- B21D43/105—Manipulators, i.e. mechanical arms carrying a gripper element having several degrees of freedom
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D—WORKING OR PROCESSING OF SHEET METAL OR METAL TUBES, RODS OR PROFILES WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21D5/00—Bending sheet metal along straight lines, e.g. to form simple curves
- B21D5/02—Bending sheet metal along straight lines, e.g. to form simple curves on press brakes without making use of clamping means
Definitions
- the present invention relates to bending of metal sheets by a bending press having a reciprocable bending mould and more precisely it relates to a method and an apparatus for automatic bending of metal sheets having high versatility of use, particularly for the automatic bending of small metal sheets, whereby it is possible to perform a number of bends on a same sheet in extremely short spaces of time; dead times resulting on standard bending presses from the picking up operation of a metal sheet and releasing of the same after bending, are therefore eliminated.
- Apparatuses for automatic bending of metal sheet material that is to say bending presses appropriately slaved by a robot, have been variously used and proposed in some prior documents, for example in US-A-4.594.870, EP-A-O 555 908 and EP-A-O 742 054.
- All these automatic bending apparatuses generally involve the use of a single robot or automatic device to perform all the picking up operations of each sheet, bending and releasing of the same bent piece, carrying out all the bending operations during a working cycle, in a single phase by means of the single robot or manipulator.
- EP-A-O 742 054 suggests the use of a Cartesian robot having several powered axes for slaving a bending press; by means of a particular calculation algorithm the gripping member of the robot is allowed to follow the sheet during bending movements, continuously controlling the position of gripping means as a function of the movement of a mould member of the same bending press, which is continuously detected by an appropriate sensor.
- the general object of the present invention is to provide an apparatus for automatic bending of metal sheets or more generally sheet material, which is suitable for fulfilling the needs referred above.
- a further object of the present invention is to provide a method for automatic bending of sheet material by means of an apparatus which can be easily slaved to any type of press, such that the handling operations of the pieces can take place in masked conditions and without dead working times for the same press, in that the operations of picking up a sheet to be bent and of releasing the bent part can take place during the same bending cycle, with the press in operation.
- the apparatus comprises first and second independent manipulators, for example anthropomorphic robots, which are movable along a linear path, each robot having an articulated arm and a picking up member defining a number of rotational axes and control means which allow each of the two manipulators to independently move along said travelling path parallel to the front side of a bending press and to follow the various movements of a metal sheet during the bending operations, sequentially performing the steps of the entire working cycle which is divided between and sequentially performed by the two manipulators.
- first and second independent manipulators for example anthropomorphic robots, which are movable along a linear path, each robot having an articulated arm and a picking up member defining a number of rotational axes and control means which allow each of the two manipulators to independently move along said travelling path parallel to the front side of a bending press and to follow the various movements of a metal sheet during the bending operations, sequentially performing the steps of the entire working cycle which is divided between and sequentially performed by the two manipulators.
- first and second independent manipulators
- the time for picking up a sheet and for releasing a bent piece is substantially equal to the effective working cycle of the press, also in view of the fact that few bends only are normally made on sheets with small dimensions.
- the cycle for bending a sheet is performed as a single operation divided between or sequentially performed by the two manipulators, so that when the first manipulator picks up a sheet and performs part of the bending cycle, for example the first two bends, the second manipulator releases the previously bent piece and puts itself in a stand-by conditions; then the first manipulator releases the partially bent sheet clamped into the moulds of the press, after which the second manipulator, intervenes to take it and complete the bending cycle.
- the first manipulator has already picked up a new metal sheet to start a new bending cycle.
- the other one picks up a new sheet to be bent or discharges an already bent piece.
- the advantage of the present invention therefore resided in the fact that it makes possible to mask into the working cycle of the press the handling steps for picking up and releasing the pieces, thanks to the alternating and combined use of the two manipulators, co-related to the working cycle of the bending press.
- the apparatus according to the invention is totally independent of the type of machine to be used for bending, which can be either of manual or automatic type, in this way achieving high working flexibility.
- the first manipulator picks up a metal sheet and makes the first half of the bends.
- the first manipulator similarly to what has been referred previously, releases the partially bent piece clamped between the moulds of the press in order to pick up a new sheet, while the second manipulator takes the previous sheet which is already partially bent, clamped between the two moulds of the press.
- the completion of bending of the previous sheet by the second manipulator can therefore take place simultaneously to the start of the bending for the new sheet by the first manipulator.
- the two manipulators perform the same bending operations, simultaneously on two different sheets in different working positions of the same press.
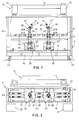
- the apparatus substantially comprises a bending press 10 as well as a robotised device 11 for picking up and manipulating the metal sheets which are to be bent according to a programmed bending scheme.
- the bending press 10 can be of any conventional type, for example it can consist of a hydraulic press having a frame structure 12 for supporting a lower mould member 13 and respectively an upper mould member 14 vertically reciprocable in respect to the fixed mould member 13, for example by means of a pair of hydraulic cylinders 15.
- the press 10 is of the type comprising an upper movable mould member; however it may also be of the type having a lower movable mould member, or with both mould members which are moving relatively one in relation to the other.
- Reference 16 in Figure 3 denotes a front sensor for the positioning of a metal sheet between the mould members of the press, which together with side sensors supply control signals indicative of the presence and correct positioning of the metal sheet between the mould members 13 and 14. In this way a control signal is provided for the starting of each bending operation, as explained hereinbelow.
- Reference 17 in Figure 3 finally denotes a signal generator, of the linear and absolute type, directly or indirectly interlocked to the movable mould member 14 to supply reference signals indicative of the positions reached by the same movable mould member 14 during its forward movement towards the lower mould member 13, to allow a correct performance of each bending operation of a sheet.
- the robotised device 11 for picking up and manipulating metal sheets to be bent in a bending press substantially comprises a base frame 18 for supporting a first manipulator or robotised arm 19, as well as a second manipulator 20, the twin or wholly identical to the previous one.
- the manipulators 19 and 20 can slide or move parallel to the front side of the bending press 10, on a pair of tracks or guides 21 which parallely extend above the longitudinal sides of the support base 18.
- the support base 18 is also provided with pivotable or castor wheels 22 which allow its movement and correct positioning in relation to the press 10.
- a bridge frame 23 extends upwards from the base 18 to support an electronic equipment for controlling the two manipulators 19 and 20, whose operation is slaved to the press 10 in the manner described hereinunder.
- Each manipulator for example the manipulator 19, comprises in turn a base body 24 provided with wheels or runners 25 moving along the guides 21.
- the lateral movement of each manipulator 19 and 20 can be achieved by any suitable drive means, for example of the hydraulic, pneumatic or electric type.
- an electric motor 26 is provided for a pair of cogged wheels 27, each of which engages with a cogged belt 28 stretched between two cross members 29 at the ends of the support base 18.
- Each manipulator 19 and 20 also comprises a articulated arm 30 provided with a gripping member 31 which can be moved on four polar rotational axes. More particularly the articulated arm 30 comprises a first arm portion 30A capable of rotating around a horizontal axis 32 parallel to the guides 21, under the control of a first drive motor 33.
- the articulated arm 30 also comprises a second arm portion 30B capable of rotating around a second horizontal axis 34, parallel to the previous one, under the control of a second drive motor 35.
- the gripping member 31 is provided with two drive motors 31' and 31'' to rotate on two axes orthogonal one to the other, of which one is parallel to the axes 32-34 and the other one longitudinal to the same gripping member 31.
- the various motors for driving the two manipulators are also fitted with respective encoders or signal generators for providing reference signals which at all times give information on the exact position in space of the gripping member 31.
- reference 36 in Figure 2 denotes the position for loading or picking up of the metal sheets to be bent, while 37 denotes the unloading or releasing position for the bent pieces.
- the working area of the two manipulators 19 and 20 can be any one along and on both sides of the support base 18 in that physically the articulated arm 30 of each manipulator can pick up and release the metal sheets alongside the press 10, or it can use a zone to the rear of the base 18 by simple rotation in a vertical plane of the articulated arm.
- the manipulators 19 and 20 can therefore work easily both on the front side and on the rear one, according to the space available.
- FIG. 4 of the accompanying drawings shows schematically the electronic device for the control and slaving of the two manipulators 19 and 20 to the bending press 10.
- the electronic control device comprises a microprocessor 40 having a volatile memory, for example a RAM, wherein a program may be stored for controlling and slaving the two manipulators 19 and 20 to the movements of the movable mould member of the press 10, by means of the position signals supplied to the microprocessor 40 by the sensor 17 via a digital-analogic converter 41.
- a program may be stored for controlling and slaving the two manipulators 19 and 20 to the movements of the movable mould member of the press 10, by means of the position signals supplied to the microprocessor 40 by the sensor 17 via a digital-analogic converter 41.
- Program and calculation means are also provided comprising an appropriate algorithm or mathematical formula for computing the co-ordinates of the translation and rotational movements of the gripping member 31 of each manipulator, in accordance with the movement of the metal sheet during bending into the press.
- the algorithm is stored in a permanent memory 42, for example an EPROM, connected to the microprocessor 40 via the bus 43.
- reference 44 denotes a further programmable and erasable memory, for example an EEPROM wherein some variable calculation data are programmed and/or stored, such as for example the maximum width of the bending cavity of the mould member 13 and the zero point on the Z axis of the movable mould member 14, on the basis of which the microprocessor 40 will calculate the co-ordinates of movement of the gripping member 31 for the metal sheets to be bent. All this is known and explained in greater detail in the application EP-A-O 742 054 mentioned previously.
- the apparatus comprises a bending press 10 and a robotised device 11 for picking up and manipulating metal sheets to be bent, which is slaved to the press itself.
- the robotised device is formed by two independent manipulators or robots 19 and 20, between which the entire bending cycle of a sheet is divided so that the first manipulator 19 picks up a metal sheet 50 from a stack in the loading position 36 at one end of the support and guide structure 18, while the other manipulator 20 is at a standstill facing the press 10 in a waiting or stand-by condition ( Figure 5).
- the first manipulator 19 Having completed the first bending steps for the sheet 50 by means of the first manipulator 19, the latter releases the partially bent sheet 50 which is left clamped between the closed mould members 13 and 14 of the press.
- the second manipulator 20 moves towards the bent sheet clamped by the bending mould members and in the brief instant for clamping of the partially bent sheet by said second manipulator 20, the first manipulator 19 moves again to the left ( Figure 7) into the picking up position to pick up a new metal sheet 51, while the second manipulator 20, which was already ready, is slaved to the press 10 and moves its articulated arm towards the metal sheet 50, already partially bent, taking it with its gripping member in the correct position, after which the same manipulator 20 returns to the previous working position ( Figure 8) where it completes the cycle of bending of the sheet 50 as a function of the programmed work program.
- the first manipulator 19 has already taken from the stack the new metal sheet 51 to be bent, in turn adopting a waiting or stand-by condition.
- the manipulator 20 moves completely to the right in Figure 9, where it rotates at the rear its articulated arm 30 to release and deposit the bent metal sheet or piece 50 in the unloading zone 37.
- the first manipulator 19 is slaved again to the press 10 in order to position the new metal sheet 51 between the mould members 13 and 14 of the press and to perform once again a first part of the working cycle, for the new sheet, while the previous finished piece is deposited by the second manipulator in the unloading zone 37.
- the working cycle of the entire apparatus can thus be cyclically repeated and continue in the manner described above.
- the great advantage of the apparatus and method according to the invention is therefore linked to the alternate use of the two manipulators 19 and 20 in sequentially performing two different parts of the bending cycle on a same metal sheet and in performing a picking up and a releasing of a metal sheet or bent piece by one of the two manipulators while the other one is working; this allows masking of the so-called handling steps of the sheets, that is to say the picking-up of a sheet to be bent, and the releasing and deposition of a bent piece, drastically reducing working times, in particular for small metal sheets.
- the apparatus as described hitherto, can be used for bending both asymmetrical and symmetrical pieces.
- the apparatus allows the two manipulators to be simultaneously used to conjointly perform the two separated parts of the bending cycle on separate sheets.
- the first manipulator 19 picks up a metal sheet from the stack in the zone 36 and performs the first half of the bends on it. Subsequently, as in the previous bending cycle, the manipulator 19 releases the partially bent sheet clamped in the press in order to pick up a new sheet. In the meantime the second manipulator moves in the position, takes the first partially bent sheet still clamped between the mould members of the press and completes its bending. Given the symmetry of the piece to be made, this latter operation can take place simultaneously with the bending of the new metal sheet taken from the first manipulator.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Bending Of Plates, Rods, And Pipes (AREA)
- Folding Of Thin Sheet-Like Materials, Special Discharging Devices, And Others (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ITMI972453 IT1295906B1 (it) | 1997-10-31 | 1997-10-31 | Procedimento e apparecchiatura per la piegatura in automatico di lamiere in fogli |
| ITMI972453 | 1997-10-31 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0914879A1 true EP0914879A1 (fr) | 1999-05-12 |
| EP0914879B1 EP0914879B1 (fr) | 2004-05-12 |
Family
ID=11378140
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19980119190 Expired - Lifetime EP0914879B1 (fr) | 1997-10-31 | 1998-10-12 | Procédé et machine pour le cintrage automatique de tôles métalliques |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP0914879B1 (fr) |
| DE (1) | DE69823773T2 (fr) |
| ES (1) | ES2218742T3 (fr) |
| IT (1) | IT1295906B1 (fr) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2003095125A2 (fr) * | 2002-05-13 | 2003-11-20 | Trumpf Maschinen Austria Gmbh & Co. Kg. | Equipement de fabrication, notamment presse a plier et mode de fonctionnement de cet equipement de fabrication |
| US6938454B2 (en) | 2002-05-13 | 2005-09-06 | Trumpf Maschinen Austria Gmbh & Co. Kg. | Production device, especially a bending press, and method for operating said production device |
| NL1028129C2 (nl) * | 2005-01-26 | 2006-07-27 | Safan Bv | Werkwijze voor het buigen van plaatvormig materiaal en pers voor het buigen van plaatvormig materiaal. |
| WO2018121838A1 (fr) * | 2016-12-27 | 2018-07-05 | Abb Schweiz Ag | Système de manipulation pendulaire pour une ligne de presse |
| WO2021016646A1 (fr) * | 2019-08-01 | 2021-02-04 | Trumpf Maschinen Austria Gmbh & Co. Kg. | Procédé de transfert, système de manipulation conçu pour celui-ci, et unité de pliage |
| CN114502295A (zh) * | 2019-10-10 | 2022-05-13 | 特鲁普机械奥地利有限公司及两合公司 | 用于运送和/或操纵部件的方法 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102005060763A1 (de) * | 2005-12-16 | 2007-06-21 | Klingel, Hans, Dr. Ing. e.h. | Biegemaschine |
| WO2012019220A1 (fr) * | 2010-08-13 | 2012-02-16 | Paul Robert Mccleary | Assemblage de support de feuille |
| CN110586729B (zh) * | 2019-09-18 | 2021-06-29 | 上海电机学院 | 一种长轴类复杂冲压件自动冲压装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4594870A (en) * | 1982-11-25 | 1986-06-17 | Shin-Meiwa Industry Co., Ltd. | Automatic bending apparatus |
| EP0555908A1 (fr) * | 1992-02-14 | 1993-08-18 | L.V.D. Company N.V. | Robot de pliage |
| US5345806A (en) * | 1989-12-29 | 1994-09-13 | Amada Company, Limited | Device for manipulating sheet metal pieces |
-
1997
- 1997-10-31 IT ITMI972453 patent/IT1295906B1/it active IP Right Grant
-
1998
- 1998-10-12 DE DE69823773T patent/DE69823773T2/de not_active Expired - Lifetime
- 1998-10-12 ES ES98119190T patent/ES2218742T3/es not_active Expired - Lifetime
- 1998-10-12 EP EP19980119190 patent/EP0914879B1/fr not_active Expired - Lifetime
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4594870A (en) * | 1982-11-25 | 1986-06-17 | Shin-Meiwa Industry Co., Ltd. | Automatic bending apparatus |
| US5345806A (en) * | 1989-12-29 | 1994-09-13 | Amada Company, Limited | Device for manipulating sheet metal pieces |
| EP0555908A1 (fr) * | 1992-02-14 | 1993-08-18 | L.V.D. Company N.V. | Robot de pliage |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2003095125A2 (fr) * | 2002-05-13 | 2003-11-20 | Trumpf Maschinen Austria Gmbh & Co. Kg. | Equipement de fabrication, notamment presse a plier et mode de fonctionnement de cet equipement de fabrication |
| WO2003095125A3 (fr) * | 2002-05-13 | 2003-12-18 | Trumpf Maschinen Austria Gmbh | Equipement de fabrication, notamment presse a plier et mode de fonctionnement de cet equipement de fabrication |
| US6938454B2 (en) | 2002-05-13 | 2005-09-06 | Trumpf Maschinen Austria Gmbh & Co. Kg. | Production device, especially a bending press, and method for operating said production device |
| EP1681111A1 (fr) * | 2002-05-13 | 2006-07-19 | Trumpf Maschinen Austria GmbH & CO. KG. | Dispositif de fabrication, notamment presse de pliage, et méthode d'utilisation de ce dispositif |
| NL1028129C2 (nl) * | 2005-01-26 | 2006-07-27 | Safan Bv | Werkwijze voor het buigen van plaatvormig materiaal en pers voor het buigen van plaatvormig materiaal. |
| CN110167718A (zh) * | 2016-12-27 | 2019-08-23 | Abb瑞士股份公司 | 用于冲压线的钟摆式处理系统 |
| WO2018121838A1 (fr) * | 2016-12-27 | 2018-07-05 | Abb Schweiz Ag | Système de manipulation pendulaire pour une ligne de presse |
| US11278951B2 (en) | 2016-12-27 | 2022-03-22 | Abb Schweiz Ag | Pendular handling system for a press line |
| WO2021016646A1 (fr) * | 2019-08-01 | 2021-02-04 | Trumpf Maschinen Austria Gmbh & Co. Kg. | Procédé de transfert, système de manipulation conçu pour celui-ci, et unité de pliage |
| CN114206522A (zh) * | 2019-08-01 | 2022-03-18 | 特鲁普机械奥地利有限公司及两合公司 | 传送方法、为此设计的操纵系统和折弯设备 |
| US20220314298A1 (en) * | 2019-08-01 | 2022-10-06 | Trumpf Maschinen Austria Gmbh & Co. Kg. | Transfer method, manipulation system designed therefor, and bending installation |
| JP2022543096A (ja) * | 2019-08-01 | 2022-10-07 | トルンプ マシーネン オーストリア ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト | 移し替え方法、そのために構成された操作システム及び曲げ装置 |
| CN114502295A (zh) * | 2019-10-10 | 2022-05-13 | 特鲁普机械奥地利有限公司及两合公司 | 用于运送和/或操纵部件的方法 |
| JP2023502316A (ja) * | 2019-10-10 | 2023-01-24 | トルンプ マシーネン オーストリア ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディトゲゼルシャフト | 構成部品を移送及び/又は操作する方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| ITMI972453A1 (it) | 1999-05-01 |
| IT1295906B1 (it) | 1999-05-28 |
| DE69823773D1 (de) | 2004-06-17 |
| EP0914879B1 (fr) | 2004-05-12 |
| DE69823773T2 (de) | 2005-05-12 |
| ES2218742T3 (es) | 2004-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5243087B2 (ja) | 取扱マニピュレータ装置 | |
| EP0554533B1 (fr) | Machine à plier des fils | |
| US7721582B2 (en) | Bending machine for rod-shaped workpieces made from wire, tubular material or the like | |
| CN1733579A (zh) | 搬运机器人系统 | |
| US4594870A (en) | Automatic bending apparatus | |
| EP0914879B1 (fr) | Procédé et machine pour le cintrage automatique de tôles métalliques | |
| KR920009855B1 (ko) | 자동 처리 장치 및 그를 채용한 금속 박판 벤딩 시스템 | |
| CN115771028A (zh) | 一种板料钣金成型自动化加工线及其加工工艺 | |
| JPH0257457B2 (fr) | ||
| US7350389B2 (en) | Method and device for reshaping a work piece with automatic handling | |
| JPH06143084A (ja) | 双腕ロボットの作動方法 | |
| EP0648577B1 (fr) | Appareil pour le faconnage de barres en particulier des barres pour beton armé | |
| CN112108545B (zh) | 高节拍滚边方法 | |
| EP0990471A1 (fr) | Machine à plier | |
| JP2022543096A (ja) | 移し替え方法、そのために構成された操作システム及び曲げ装置 | |
| JPH0133252B2 (fr) | ||
| JP2862872B2 (ja) | 折曲げ加工装置に対して板材の供給位置決めを行う産業用ロボットの制御方法 | |
| JP3782125B2 (ja) | 板材加工装置 | |
| JP3393110B2 (ja) | 自動加工装置 | |
| CN221186571U (zh) | 一种用于铸件抓取的机械手 | |
| CN211077405U (zh) | 一种物料加工转送机构 | |
| USRE34569E (en) | Robotized handling device and sheet metal bending system featuring the same | |
| JP2663849B2 (ja) | 加工装置 | |
| JP4412961B2 (ja) | 溶接システム及び溶接方法 | |
| JP2514162Y2 (ja) | マニプレ―タ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE ES FR GB IT |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| 17P | Request for examination filed |
Effective date: 19991029 |
|
| AKX | Designation fees paid |
Free format text: DE ES FR GB IT |
|
| 17Q | First examination report despatched |
Effective date: 20030212 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: ANTIL S.P.A. |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: ANTIL S.P.A. |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE ES FR GB IT |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REF | Corresponds to: |
Ref document number: 69823773 Country of ref document: DE Date of ref document: 20040617 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2218742 Country of ref document: ES Kind code of ref document: T3 |
|
| ET | Fr: translation filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20050215 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20101013 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20101014 Year of fee payment: 13 Ref country code: IT Payment date: 20101021 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20111025 Year of fee payment: 14 Ref country code: FR Payment date: 20111104 Year of fee payment: 14 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20121012 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20130628 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130501 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20121012 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 69823773 Country of ref document: DE Effective date: 20130501 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20121031 Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20121012 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20140116 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20121013 |