EP0548533A2 - Dispositif pour déterminer une grandeur variable d'un véhicule à moteur - Google Patents
Dispositif pour déterminer une grandeur variable d'un véhicule à moteur Download PDFInfo
- Publication number
- EP0548533A2 EP0548533A2 EP92119544A EP92119544A EP0548533A2 EP 0548533 A2 EP0548533 A2 EP 0548533A2 EP 92119544 A EP92119544 A EP 92119544A EP 92119544 A EP92119544 A EP 92119544A EP 0548533 A2 EP0548533 A2 EP 0548533A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- switching
- line
- switching element
- state
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D11/00—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated
- F02D11/06—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance
- F02D11/10—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type
- F02D11/106—Detection of demand or actuation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/22—Safety or indicating devices for abnormal conditions
- F02D41/222—Safety or indicating devices for abnormal conditions relating to the failure of sensors or parameter detection devices
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/60—Input parameters for engine control said parameters being related to the driver demands or status
- F02D2200/602—Pedal position
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2400/00—Control systems adapted for specific engine types; Special features of engine control systems not otherwise provided for; Power supply, connectors or cabling for engine control systems
- F02D2400/08—Redundant elements, e.g. two sensors for measuring the same parameter
Definitions
- the invention relates to a device for detecting a variable size in a vehicle according to the preamble of claim 1.
- Such a device is known from DE-OS 40 04 086.
- a measuring device is used to detect the position of an adjusting device in a vehicle, which generates two measuring signals representing the position of the adjusting device.
- this position transmitter is assigned a second position transmitter, which also generates a signal representing the position.
- the two devices shown above are used in electronic engine power controls.
- a characteristic of such systems is that e.g. the accelerator pedal and / or the power actuator move very precisely and very often to a narrowly limited position range, for example at idling and / or at full load point, that is to say in the turning points of the range of motion of the respective adjusting device.
- potentiometers increased contact resistance between the potentiometer track and the grinder occurs due to contamination and abrasion.
- the measurement result is falsified
- the control system is switched to emergency operation by the monitoring measures described above. Therefore, no improvement can be achieved by the redundant design of the potentiometers.
- the availability of the vehicle remains limited.
- At least one switching element is connected to the adjusting device, the switching state of which is recorded and stored in a memory element.
- the output signal of the measuring device is determined at least in predetermined value ranges in accordance with the stored switching state of the switching element or elements.
- the encoder signal is determined in accordance with the stored switching states of the switching element or elements.
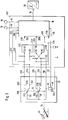
- FIG. 1 shows a first embodiment of the measures according to the invention, which are illustrated in Figure 2 with the aid of diagrams and the representation of a position transmitter.
- FIG. 3 shows a second exemplary embodiment of the measures according to the invention, which are illustrated in FIG. 4 with the aid of diagrams and the representation of a position transmitter and in FIG. 5 with the aid of a flow chart.
- FIG. 1 shows a computing element 10 to which the following input lines are fed.
- the input lines 12 to 14 connect the computing element 10 to measuring devices 16 to 18 for detecting operating variables of the engine and / or the vehicle.
- the connecting line 20 connects the computing element 10 to a position transmitter 22, which is mechanically connected to the accelerator pedal 25 of the vehicle via a connection 24.
- at least one of the input lines 28 or 30 is fed from a memory element 26, the memory element 26 being connected via line 32 to a first contact 34, via line 36 to a second contact 40 of a changeover switch 42.
- the changeover switch is connected to the accelerator pedal 25 via the mechanical connection 24. It is connected at connection 44 to the positive pole of the supply voltage and, depending on the position of the control element, can assume two switching states, which on the one hand connect connection 34 and on the other hand connection 40 to the positive supply voltage.
- the position transmitter 22 essentially consists of a potentiometer.
- This comprises a resistance track 46, over which a wiper element 48 is guided.
- the wiper element 48 is connected to the mechanical connection 24, while the connecting line 20 transmits the measurement signal detected by the wiper position to the computing element 10.
- the resistance path is connected to the positive pole via the connection 50 and to the negative pole of the supply voltage via the connection 52.
- Line 54 represents the output lines of computing element 10, which are used to control the drive unit of the vehicle.
- block 56 which, for example, denotes an electrically actuable throttle valve or an injection pump.
- the electronic engine power control shown controls at least one of the power parameters of the drive unit as a function of the operating variables supplied via the input lines 12 to 14 and the position of the accelerator pedal 25, which is detected by the position transmitter 22 and transmitted to the computing element via the transmission line 20.
- the at least one performance parameter of the drive unit is set in the sense of the driver's request detected by the position transmitter 22.
- the switching element 42 together with the memory element 26 is used to monitor the function of the position transmitter.
- the latter represents a so-called RS flip-flop.
- the line 32 is routed to the S input and the line 36 to the R input.
- Output Q forms line 28, while line 30 is applied to the complementary output.
- the storage element 26 can be other embodiments, it being crucial that the respective switching state of the changeover switch 42 is stored. This can also be advantageously carried out within the computing element 10.
- a single switch can also be used instead of the advantageous changeover switch.
- a change in the switching state triggers the storage process.
- the switch output signal can be fed to the clock input of the flip-flop, the complementary output of which is fed back to the set input. An edge of the clock signal changes the memory content.
- the switch 42 If the switch 42 is in the position shown, the set input of the flip-flop 26 is supplied with a high signal level, while the reset input is at a low signal level. This leads to a high signal level on line 28 and a low signal on line 30. If the changeover switch 42 changes its switching state, the signal levels on lines 28 and 30 are exchanged.
- this behavior is used to monitor and to increase the availability of the position transmitter 22.
- the position transmitter 22 is monitored on the basis of the signal level and the measurement signal, certain signal levels and measurement signal values having to be present for certain position ranges (for example, a position value smaller than V0 must exist for the position range up to the value alpha0 in FIG. 2). If this is not the case, an error is recognized and usually an emergency operation is started. In the area of the turning points, however, an equivalent signal for the position of the control element is determined on the basis of the stored switching states. This is described in more detail below using the example of the second exemplary embodiment.
- the procedure according to the invention can also be applied to a power control element, such as a throttle valve or an injection pump, as well as other leg elements in the vehicle.
- a power control element such as a throttle valve or an injection pump
- Other measuring devices for detecting positions in the area of a vehicle can also be advantageously configured using the procedure according to the invention.
- the procedure according to the invention can also be used in connection with alternative drive concepts, e.g. Electric motor drives can be used.
- FIG. 2a shows the ideally represented linear characteristic of the position transmitter 22.
- the position alpha of the operating element 25 is plotted on the horizontal axis, while the measurement signal value V carried on the line 20 is recorded on the vertical axis.
- the signal profiles at the connection points 34 and 40 of the changeover switch 42 are indicated in FIG. 2b.
- a high signal level is conducted on the line 32 in the area of the idle position of the operating element 25, which changes to a low signal level for the further range of movement of the operating element 26 (solid line) at a certain position, a certain angle.
- the signal curve on line 36 (broken line) shows an inverse behavior.
- Figure 2c shows a realization of the changeover switch in connection with a potentiometer.
- the first resistance track 100 represents the potentiometer designated by reference numeral 46 in FIG. 1, which is connected at one end to the positive pole of the supply voltage and at the other end to the negative pole.
- a second resistance track 102 is interrupted by the insulation point 104. This creates two separate areas.
- the grinder 48 sweeps over the resistance path and the two areas. If the control element is in its idle position area, the grinder 48 sweeps over the first area. This accordingly represents the connection 34 of the changeover switch, while the second area corresponds to the connection 40 of the changeover switch.
- the connecting lines shown in FIG. 2c are assigned to the two areas.
- the grinder 48 is designed such that on the one hand it takes the measured value from the resistance track 100 (tap 45) and passes it on to the computing element 10 via the line 20, and on the other hand applies a positive voltage to the resistance track 102 to detect the switching state (cf. 4d and DE-OS 34 16 495, tap / connection 44). If the grinder sweeps over the isolated area 104, the switching states of the changeover switch change according to FIG. 2b.
- FIG. 1 A further advantageous exemplary embodiment of the measures according to the invention is shown in FIG.
- the elements already known from FIG. 1 have the same reference numerals and are not explained in more detail below.
- the exemplary embodiment shown in FIG. 3 essentially consists of the measuring device 200 and the control system 202.
- the measuring device 200 consists of the potentiometer 204 and two switching elements 206 and 208.
- the mechanical connection 24 connects the accelerator pedal both to the wiper 48 of the potentiometer 204 and to the changeover switches 206 and 208.
- the resistance path 46 of the potentiometer is connected to ground via line 52 and to the positive pole of the supply voltage via line 50. Furthermore, line 50 leads to connection 210 of changeover switch 206 and to connection 212 of changeover switch 208.
- the position signal of potentiometer 204 is output via line 20 to control system 202.
- the first contact 214 of the changeover switch 204 (the so-called safety switch) switching in the idle range is connected to the line 216, while the other contact 218 is linked to the line 220.
- the contact 222 of the change-over switch 208 (the so-called full-load switch) which switches in the full-load position range of the accelerator pedal is acted upon by line 224, while the other contact 226 is linked to line 228.
- the changeover switch 206 changes its switching state when leaving the idle position, after a predetermined angle, which is small in comparison with the total deflection angle, so that the positive pole of the supply voltage is connected to the contact 218 and via line 220 to the Control system 202 the information "safety switch off" carried becomes.
- the changeover switch 208 changes its switching state in the area of the fully depressed accelerator pedal in such a way that the positive pole of the supply voltage is connected to the contact 202. As a result, the information "full load switch on” is transmitted to the control system 202 via the line 228.
- the control system 202 essentially consists of the computing element 10 and two storage elements 230 and 232, each of which is assigned to one of the changeover switches 206 or 208.
- the line 234 connects the line 206 to the input 236 of the computing element and, if necessary, supplies the latter with the signal state "safety switch on" of the changeover switch 206.
- the line 238 connects the line 220 to the input 240 of the computing element and, if necessary, supplies the latter with the signal state "safety switch off" of the changeover switch 206.
- the line 242 connects the line 224 to the input 244 of the computing element 10 and, if necessary, supplies the latter with the signal state "full load switch off”.
- the line 246 connects the line 228 to the input 248 of the computing element 10 and, if necessary, supplies the latter with the signal state “full load switch on”.
- the output line 252 of the memory element 232 is fed to the input 250 of the computing element 10.
- the line 256 of the memory element 233 is fed to the input 254 in an analogous manner.
- the connecting lines 216 and 222 with the corresponding switching status information are fed to the memory element 232, while the lines 224 and 228 with the corresponding information are fed to the switching element 233.
- the memory elements 232 and 233 are RS flip-flops. It is at Memory element 232 leads line 216 to the set input, while line 220 leads to the reset input. The output line 252 is connected to the Q output of the flip-flop. Analogously, line 224 leads to the reset input of flip-flop 233 and line 228 leads to the set input, while output line 256 is connected to the Q output of flip-flop 233.
- FIG. 4 shows a corresponding implementation of the measuring arrangement 200 in the form of resistance tracks.
- FIGS. 4a to c the position alpha of the control element 25 between its minimum (alphamin) and maximum positions (alphamax) is plotted on the horizontal axis, while the signal level V of the respective elements is shown on the vertical axis.
- Figure c shows the ideally linear characteristic 280 of the potentiometer 204. This is generated by the movement of the grinder 48 over the resistance track 46.
- the voltage range of the potentiometer is limited by minimum and maximum values (Vmin, Vmax), which are assigned to the respective minimum and maximum position values (alphamin, alphamax) of the control element 25.
- the signal curve at the changeover switch 206 is presented in FIG. 4b.
- the solid line shows the signal curve 282 at the connection contact 214 (on the line 216), the curve shown in broken lines shows the signal curve 284 at the contact 218 or on the line 220.
- the switch 206 changes its switching state, the high signal level on the line 260 changing to the low, while due to the implementation in conductor tracks, the signal level on the line 220 changes slightly from the low to no other position values later to the high.
- the change in the signal level on line 220 leads to the resetting of flip-flop 232, whose output signal level on line 252 then changes from high to low signal level, as is shown in FIG.
- the switch 206 switches as shown above and when the low signal level on line 210 changes to the high signal level, the flip-flop 232 becomes set, causing its output signal level to change from low to high. This creates a switching hysteresis in the waveform 286 of the output signal of the flip-flop.
- the amount of the hysteresis is very small, so that it has no negative effects on the function described below.
- the waveforms in connection with the changeover switch 208 and the flip-flop 233 are presented in an analogous manner.
- the signal curve 288 is on the line analogously to FIG 224 marked by a solid line, while the signal curve 290 is dashed on line 228, the signal curve 292 at the output of the flip-flop on line 256 is dash-dotted.
- the changeover switches 206 and 208 are implemented in a manner comparable to that shown in FIG. 2d.
- a conductor path interrupted in the vicinity of the idle position or full load position is provided for each switch.
- a grinder connected to the positive pole of the supply voltage with a plurality of taps (implementation of the connection points 50) and tapping the supply voltage on a parallel current path (not shown) sweeps over the interrupted resistance tracks through the mechanical connection 24 in accordance with the position of the operating element 25
- Resistor path areas are provided with connections (reference numbers see FIG. 3) to which the lines 216 to 228 are connected. These lead to a high signal level when the wiper is connected to the corresponding resistance track. Otherwise they have a low signal level.
- the changeover switches 206 and 208 are implemented together with the potentiometer 204. An embodiment of this arrangement is described in principle in DE-OS 34 16 495 (US 4 706 062).
- FIG. 5 shows a flow chart for evaluating the switching states or the storage states of the storage elements in connection with the measured value of the potentiometer for monitoring and improving the availability.
- the following measured values are read in by the computing element 10 in a first step 300: potentiometer measured value (line 20, V POT ), switching state of the changeover switch 206 "Safety switch” (Si a, line 234), and “safety switch” (Si from line 238), the switching state of the changeover switch 218 "full-load a" (VL a, line 246), “full-load switch off” (VL from line 242 ), Memory state of the memory element 232 (SiRS, line 252) and memory state of the memory element 233 (VLRS, line 256).
- step 302 it is checked whether the storage state of the storage elements corresponds to a predetermined configuration, for example whether, in accordance with the example in FIG. 4, SiRS has low, VLRS high signal levels. If the query is answered with "yes", the system is in the idle area. In step 304 there is then a query as to whether the measured potentiometer voltage V pot is within a voltage range formed by a typical voltage value in normal operation (V 1 + delta). If this is also the case, a plausibility comparison of the various switch and memory states is carried out in the subsequent step 306. If the following combination of states is present in the implementation form according to FIG. 4, the system is considered to be functional: Si a: low signal level; Si off : high signal level; VL off : high signal level; VL a: low signal level; SiRS: high signal level; VLRS: low signal level.
- step 306 If at least one of the prerequisites queried in step 306 is violated, an error state is recognized in accordance with step 308 and the control system is put into an emergency operation mode by reducing the power.
- an idle value i.e. a value indicating the idle position of the element connected to the measuring device is output and processed in accordance with the storage states determined in step 302.
- the output signal of the measuring device is determined in accordance with the storage states.
- step 312 If the answer in step 302 was "no", i.e. if the system is not in the idle state, a query is made in step 312 as to whether the system is in the full load state. This is done by querying whether SiRS has high, VLRS low signal level.
- the potentiometer voltage V pot is checked in step 314 to determine whether it is in a value range (V vl + - delta) formed by a full load value. The turning point is not part of this area. If the voltage value is within this range, the functionality of the measuring device is checked on the basis of the switching or storage states by means of a plausibility check.
- the following switching or storage states must exist: Si a: low level; Si off : high level; VL A: a high level; VL off : low level; SiRS: low level; VLRS: high level.
- step 316 The presence of these conditions is checked in step 316. If the answer is positive, the measuring device is functional and according to step 307, which follows in this case, the detected position value V pot is output for further processing and evaluation.
- step 308 error operation
- a full load value i.e. a value indicating the full load position of the element connected to the measuring device is output and processed in accordance with the memory states determined in step 312.
- a voltage value recorded in the turning points is not processed further by the measures according to steps 310 or 316, so that an error state in this area has no effects on the control system.
- the memory states nevertheless ensure that the system functions correctly in these points.
- step 312 If it was found in step 312 that the memory states do not have the queried values, it can be assumed that the element connected to the measuring device is neither near the full load nor near the idle position.
- step 318 it is therefore checked whether the potentiometer signal value lies within a range delimited by an upper V o and a lower limit voltage V u . This serves to initiate a plausibility check of the measuring device also in this position range.
- step 320 If the voltage is in the predetermined range, the presence of the following conditions is checked in step 320.
- Si a low signal level
- Si off high signal level
- VL a low signal level
- VL off high signal level
- SiRS low signal level
- VLRS high signal level
- the measuring device is functional. According to step 307, the detected value V pot is then delivered for further processing. In the opposite case, the measuring device is assumed to be defective and the error is identified in step 308 and an emergency operation function is initiated if necessary.
- the detected value V pot is output in accordance with step 307.
- Comparable measures can also be carried out in connection with the exemplary embodiment according to FIG. 1 with only one changeover switch.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
- Control Of Throttle Valves Provided In The Intake System Or In The Exhaust System (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE4142498A DE4142498A1 (de) | 1991-12-21 | 1991-12-21 | Einrichtung zur erfassung einer veraenderlichen groesse bei einem fahrzeug |
| DE4142498 | 1991-12-21 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP0548533A2 true EP0548533A2 (fr) | 1993-06-30 |
| EP0548533A3 EP0548533A3 (fr) | 1994-04-27 |
| EP0548533B1 EP0548533B1 (fr) | 1996-11-13 |
Family
ID=6447829
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP92119544A Expired - Lifetime EP0548533B1 (fr) | 1991-12-21 | 1992-11-16 | Dispositif pour déterminer une grandeur variable d'un véhicule à moteur |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP0548533B1 (fr) |
| JP (1) | JPH05248303A (fr) |
| DE (2) | DE4142498A1 (fr) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0663585A1 (fr) * | 1994-01-14 | 1995-07-19 | Robertshaw Controls Company | Capteur de position d'une pédale d'accélérateur |
| FR2733797A1 (fr) * | 1995-05-05 | 1996-11-08 | Bosch Gmbh Robert | Procede et dispositif pour controler le fonctionnement de la saisie de valeurs de mesure dans une commande electronique de puissance d'un vehicule |
| US6044318A (en) * | 1996-01-25 | 2000-03-28 | Rover Group Limited | Powertrain control system |
| WO2004040111A1 (fr) * | 2002-10-19 | 2004-05-13 | Robert Bosch Gmbh | Procede et dispositif pour controler un capteur d'accelerateur |
| FR3137354A1 (fr) * | 2022-07-04 | 2024-01-05 | Psa Automobiles Sa | Surveillance de la fonction de fourniture de couple maximal dans un véhicule |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10142803A1 (de) * | 2001-08-31 | 2003-03-20 | Bosch Gmbh Robert | Vorrichtung zur Zustandserfassung eines in einem Kraftfahrzeug angeordneten Bedienelements |
| US8019521B2 (en) | 2006-03-16 | 2011-09-13 | Chrysler Group Llc | Enhanced throttle control |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2416131A1 (de) * | 1973-05-25 | 1974-12-12 | Interna9Ional Business Machine | Schaltung zur unterdrueckung von kontaktprellimpulsen |
| DE3631200A1 (de) * | 1986-09-13 | 1988-03-24 | Bosch Gmbh Robert | Einrichtung zur steuerung der leistung einer brennkraftmaschine in einem kraftfahrzeug |
| EP0269118A2 (fr) * | 1986-11-28 | 1988-06-01 | Nippondenso Co., Ltd. | Appareil de commande de papillon |
| US5127263A (en) * | 1990-06-11 | 1992-07-07 | Jatco Corporation | Processing of throttle opening degree indicative signal |
| DE4126025A1 (de) * | 1991-08-06 | 1993-02-11 | Bosch Gmbh Robert | System zur steuerung bzw. regelung einer brennkraftmaschine in einem kraftfahrzeug |
-
1991
- 1991-12-21 DE DE4142498A patent/DE4142498A1/de not_active Withdrawn
-
1992
- 1992-11-16 DE DE59207517T patent/DE59207517D1/de not_active Expired - Fee Related
- 1992-11-16 EP EP92119544A patent/EP0548533B1/fr not_active Expired - Lifetime
- 1992-12-18 JP JP4337713A patent/JPH05248303A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2416131A1 (de) * | 1973-05-25 | 1974-12-12 | Interna9Ional Business Machine | Schaltung zur unterdrueckung von kontaktprellimpulsen |
| DE3631200A1 (de) * | 1986-09-13 | 1988-03-24 | Bosch Gmbh Robert | Einrichtung zur steuerung der leistung einer brennkraftmaschine in einem kraftfahrzeug |
| EP0269118A2 (fr) * | 1986-11-28 | 1988-06-01 | Nippondenso Co., Ltd. | Appareil de commande de papillon |
| US5127263A (en) * | 1990-06-11 | 1992-07-07 | Jatco Corporation | Processing of throttle opening degree indicative signal |
| DE4126025A1 (de) * | 1991-08-06 | 1993-02-11 | Bosch Gmbh Robert | System zur steuerung bzw. regelung einer brennkraftmaschine in einem kraftfahrzeug |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0663585A1 (fr) * | 1994-01-14 | 1995-07-19 | Robertshaw Controls Company | Capteur de position d'une pédale d'accélérateur |
| FR2733797A1 (fr) * | 1995-05-05 | 1996-11-08 | Bosch Gmbh Robert | Procede et dispositif pour controler le fonctionnement de la saisie de valeurs de mesure dans une commande electronique de puissance d'un vehicule |
| US6044318A (en) * | 1996-01-25 | 2000-03-28 | Rover Group Limited | Powertrain control system |
| WO2004040111A1 (fr) * | 2002-10-19 | 2004-05-13 | Robert Bosch Gmbh | Procede et dispositif pour controler un capteur d'accelerateur |
| FR3137354A1 (fr) * | 2022-07-04 | 2024-01-05 | Psa Automobiles Sa | Surveillance de la fonction de fourniture de couple maximal dans un véhicule |
Also Published As
| Publication number | Publication date |
|---|---|
| DE4142498A1 (de) | 1993-06-24 |
| DE59207517D1 (de) | 1996-12-19 |
| EP0548533A3 (fr) | 1994-04-27 |
| EP0548533B1 (fr) | 1996-11-13 |
| JPH05248303A (ja) | 1993-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0446453B1 (fr) | Procédé et dispositif de commande et/ou de régulation du moteur automobile à combustion | |
| EP0536557B1 (fr) | Dispositif pour commander la puissance motrice d'un véhicule | |
| DE4004086C2 (fr) | ||
| EP0468007B1 (fr) | Systeme de commande et/ou de regulation d'un moteur a combustion interne | |
| EP0788581B1 (fr) | Procede et dispositif de commande de l'unite d'entrainement d'un vehicule | |
| DE4235880C2 (de) | Verfahren und Vorrichtung zur Erfassung einer veränderlichen Größe bei Fahrzeugen | |
| EP0536567A1 (fr) | Dispositif pour détecter une variable dans des véhicules | |
| EP0601150B1 (fr) | Dispositif de commande de vehicules a moteur | |
| DE3612905C2 (de) | Verfahren zum Auslösen einer Schaltfunktion | |
| EP0354269B1 (fr) | Circuit pour le contrôle de la résistance de contact d'un potentiomètre | |
| EP0548533B1 (fr) | Dispositif pour déterminer une grandeur variable d'un véhicule à moteur | |
| DE4204623C2 (de) | Einrichtung zur Erfassung einer veränderlichen Größe in Fahrzeugen | |
| DE19516583A1 (de) | Verfahren und Vorrichtung zur Funktionsüberprüfung der Meßwerterfassung bei einer elektronischen Leistungssteuerung eines Fahrzeugs | |
| DE2755338C2 (de) | Elektrische Stellvorrichtung für Geschwindigkeitsregeleinrichtungen | |
| DE19719518A1 (de) | Verfahren und Vorrichtung zur Steuerung einer Antriebseinheit eines Kraftfahrzeugs | |
| DE4115647B4 (de) | Steuersystem in einem Fahrzeug | |
| DE4314118B4 (de) | Verfahren und Vorrichtung zur Steuerung der Antriebsleistung eines Fahrzeugs | |
| DE3836913A1 (de) | Sicherheitsschaltung fuer elektronische geschwindigkeitsregel- bzw. steueranlagen fuer kraftfahrzeuge | |
| DE4322472B4 (de) | Schaltungsanordnung zur Überwachung eines Stellungsgebers | |
| DE19923688A1 (de) | Verfahren und Vorrichtung zur Fehlererkennung bei Meßgrößen in einem Fahrzeug | |
| EP0639706B1 (fr) | Système de commande d'un actuateur pour régler l'alimentation en air d'un moteur de véhicule | |
| DE102005028491B4 (de) | Elektronischer Steuerschalter für eine Kraftfahrzeug-Antriebsstrang-Anwendung und elektronisches Steuersystem | |
| EP0708233A2 (fr) | Procédé et dispositif pour commander un moteur à combustion interne | |
| DE4335913C2 (de) | Verfahren und Vorrichtung zur Steuerung einer Brennkraftmaschine | |
| DE19842374B4 (de) | Verfahren und Vorrichtung zur Steuerung einer Antriebseinheit |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): DE FR GB |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): DE FR GB |
|
| 17P | Request for examination filed |
Effective date: 19941027 |
|
| 17Q | First examination report despatched |
Effective date: 19950613 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE FR GB |
|
| ET | Fr: translation filed | ||
| REF | Corresponds to: |
Ref document number: 59207517 Country of ref document: DE Date of ref document: 19961219 |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 19970123 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20001109 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20001121 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20010126 Year of fee payment: 9 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20011116 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: IF02 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20020702 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20020730 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |