EP0535262B1 - Mehrfach verstellbarer, an die Körpergrösse anpassbarer Stuhl, insbesondere Drehstuhl - Google Patents
Mehrfach verstellbarer, an die Körpergrösse anpassbarer Stuhl, insbesondere Drehstuhl Download PDFInfo
- Publication number
- EP0535262B1 EP0535262B1 EP91116685A EP91116685A EP0535262B1 EP 0535262 B1 EP0535262 B1 EP 0535262B1 EP 91116685 A EP91116685 A EP 91116685A EP 91116685 A EP91116685 A EP 91116685A EP 0535262 B1 EP0535262 B1 EP 0535262B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- seat
- backrest
- chair
- transverse axis
- support arms
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 230000006835 compression Effects 0.000 claims description 10
- 238000007906 compression Methods 0.000 claims description 10
- 230000008093 supporting effect Effects 0.000 claims description 3
- 230000008878 coupling Effects 0.000 claims 1
- 238000010168 coupling process Methods 0.000 claims 1
- 238000005859 coupling reaction Methods 0.000 claims 1
- 230000007246 mechanism Effects 0.000 abstract description 23
- 230000001360 synchronised effect Effects 0.000 abstract description 18
- 230000009471 action Effects 0.000 abstract description 4
- 238000010276 construction Methods 0.000 description 7
- 230000000694 effects Effects 0.000 description 6
- 230000008901 benefit Effects 0.000 description 5
- 230000008859 change Effects 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 1
- 210000001217 buttock Anatomy 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 210000004197 pelvis Anatomy 0.000 description 1
- 230000000750 progressive effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
Images



Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C1/00—Chairs adapted for special purposes
- A47C1/02—Reclining or easy chairs
- A47C1/022—Reclining or easy chairs having independently-adjustable supporting parts
- A47C1/023—Reclining or easy chairs having independently-adjustable supporting parts the parts being horizontally-adjustable seats ; Expandable seats or the like, e.g. seats with horizontally adjustable parts
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C1/00—Chairs adapted for special purposes
- A47C1/02—Reclining or easy chairs
- A47C1/031—Reclining or easy chairs having coupled concurrently adjustable supporting parts
- A47C1/032—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts being movably-coupled seat and back-rest
- A47C1/03261—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts being movably-coupled seat and back-rest characterised by elastic means
- A47C1/03272—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts being movably-coupled seat and back-rest characterised by elastic means with coil springs
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C1/00—Chairs adapted for special purposes
- A47C1/02—Reclining or easy chairs
- A47C1/031—Reclining or easy chairs having coupled concurrently adjustable supporting parts
- A47C1/032—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts being movably-coupled seat and back-rest
- A47C1/03255—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts being movably-coupled seat and back-rest with a central column, e.g. rocking office chairs
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C1/00—Chairs adapted for special purposes
- A47C1/02—Reclining or easy chairs
- A47C1/031—Reclining or easy chairs having coupled concurrently adjustable supporting parts
- A47C1/032—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts being movably-coupled seat and back-rest
- A47C1/03261—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts being movably-coupled seat and back-rest characterised by elastic means
- A47C1/03266—Reclining or easy chairs having coupled concurrently adjustable supporting parts the parts being movably-coupled seat and back-rest characterised by elastic means with adjustable elasticity
Definitions
- the invention relates to a multi-adjustable, adaptable to the size of the chair, in particular swivel chair, in which the seat back independent of the seat is held by two support arms that extend from a first transverse axis under the seat laterally from this to the rear and variable in length as in different lengths can be determined by a locking device.
- a chair of this type is known from DE 33 23 171 A1.
- the well-known chair already has an adjustable seat height.
- the support arms designed as a hollow tube, which form an angle of 30 ° with the horizontal here, mean that when the height of the backrest is raised above the seat, the seat depth increases at the same time.
- neither the backrest nor the seat can be tilted.
- Permanent mechanics and synchronous mechanisms are also known.
- the seat is rigidly connected to the chair base, i.e. cannot be tilted, while the backrest is attached to the chair base so that it can be tilted against the action of a spring.
- the backrest can thus be optimally matched to the back regardless of the seat. Since the rigid seat does not follow the movements of the backrest, there are also considerable disadvantages.
- the seat and backrest are coupled in such a way that when the backrest is returned, the seat is also tilted backwards.
- the seat weight portion already causes the backrest to tip backwards even in the front sitting position, so that it loses its supporting effect.
- a chair with synchronous mechanism (DE 38 17 761 C2) is also known, in which the backrest is held by two support arms running on both sides of the seat at approximately 40 ° to the rear, which are in their foremost region, i.e. under the front edge of the seat rigid seat supports are pivotally mounted. Between this pivot axis and the connection of the support arms to the backrest, a downwardly projecting mounting bracket is provided, on which the seat with its central region is rotatably mounted.
- the object of the invention is therefore to propose a chair with synchronous mechanism in which the seat depth, backrest height and armrest height can be adjusted at the same time and the synchronous mechanism in the front seat posture is automatically locked so that the seat force does not lead to a reduction in the support effect of the backrest on the back.
- the backrest is supported by two support arms which are mounted on the seat and extend laterally from this to the rear and are variable in length and which can be locked in different lengths by a locking device.
- This adjusts the seat depth and backrest height at the same time.
- the upper part of the telescopically subdivided, length-adjustable support arm is also provided with an armrest, then the armrest height is also adjusted at the same time.
- the seat depth, backrest height and armrest height can thus be adjusted synchronously with a single, sensible adjustment.
- a single chair construction can also be made accessible to an extremely wide range of user sizes, since there is a particularly large size change range.
- This size change range is decisively shaped by the fact that the support arms form an angle of at least 45 °, preferably over 50 ° and at least almost 52 ° with the horizontal in the rest position. Because in this way a height adjustment range of the upper support point of the iliac crest of 180 - 230 mm is achieved. At the same time, the armrest has a height adjustment range of 200 to 260 mm above the seating point and the seat depth can also be changed over a wide range. Given the steep position of the support arms, the optimal articulation point for their lower ends is at a distance of one third of the seat depth from the front edge of the seat.
- the seat is first mounted in the mechanical housing in the usual manner at its front end about a horizontal axis.
- the seat is also pushed up by a spring, just as another spring pushes the backrest forward.
- a rigid support is set between the mechanism housing and the seat at a distance from the pivot axis of the seat. This is designed so that it is only released when the backrest is clearly and deliberately deflected by the user to the rear, and then the synchronizing mechanism can take effect.
- the rigid support does not have any effect on the load on the seat by the user on the backrest. This does not swing back when the user sits down, nor is the force of the spring pushing the backrest forward reduced.
- the advantages of permanent mechanics and synchronous mechanics are actually combined in one chair with easy adjustment.
- the support arms are extended beyond their articulation under the seat and each carry a swivel plate, which itself, or preferably via another, on the one hand on the swivel plate and on the other hand on the transverse axis between the two levers the support articulated pull lever is connected to it and thereby dissolves or sets it up.
- this chair is also pushed upwards by a spring and the backrest is pushed forward.
- the spring pushing the seat upwards is inserted between the mechanical housing acting as the support and the seat, the point of application of this spring pushing the seat upwards being in the vicinity of the transverse axis arranged thirdly below the seat from its front edge.
- Mechanical springs are used as springs, which have the advantage of the progressive effect compared to the almost linear identification of a gas spring: with increasing deflection, the restoring force increases. This is particularly important for the restoring force on the backrest for ergonomic reasons.
- the seat is given an inclination of 3 to 4 ° forward in the rest position. This is the starting point for the synchronous kinematics after the support of the seat has been released, so that a pre-rotation of the pelvis is initiated to straighten the spine.
- the specified forward tilt is a compromise between this effect achieved and a limitation of the forward tilt to a value which prevents the user from sliding forward from the seat.
- FIG. 1 shows a chair with a chair base 10, to which a mechanical housing 12 is rigidly connected, which covers or supports all the parts explained below.
- a seat 14 is pivoted in the mechanical housing 12 at its front end about a transverse axis.
- a backrest 16 is not directly connected to the seat, but via telescopic support arms 18 with locking device 20 and armrests 22.
- the lower end of the support arms 18 is in each case on a horizontally and transversely extending first transverse axis 24 pivoted. This applies to the lower or inner part of the telescopic support arm.
- the upper or outer part of the telescopic support arms 18 connected to the backrest has the armrest. The user can release the rigid connection of the two parts of the support arms 18 against each other by actuating the locking device and the upper part of the support arms guided in the manner indicated in the figure on the lower part of the Pull the support arms up and fix them in the desired position.
- Fig. 3 shows the corresponding structure in detail.
- the mechanical housing 12 is fastened on the chair base 10 and holds the support arms 18 of the backrest (not shown in the figure) via the first transverse axis 24 and the seat 14 via a second transverse axis 26.
- the first transverse axis 24 is to be arranged at a third of the total seat depth and as high as possible, that is to say close to the seat 14.
- the second transverse axis 26 lies in the foremost region of the seat shell 12, that is to say at the front edge of the seat.
- the seat 14 is slightly inclined forward. For this purpose, it is pressed upwards by a spring, as will be explained in more detail below with reference to FIG. 4.
- the spring pivots the seat 14 about the second transverse axis 26 in the counterclockwise direction. This pivoting is limited by a rigid support from two levers connected in a third transverse axis 28.
- the somewhat longer lever 30 is articulated at its upper end on the underside of the seat 14 and approximately vertically above the axis of the chair base 10, specifically on a dimensionally stable seat support 34 integrated in the seat 14, the front end in the mechanical housing 12 is pivotally mounted on the second transverse axis 26.
- the figure also shows that the lower end of the somewhat shorter lever 32 is articulated somewhat next to and in front of the axis of the chair base 10.
- the lever 32 is also supported with a rear-facing nose on top of the chair foot on a cushion.
- the figure in particular clearly shows that the two levers 30, 32 are approximately aligned with one another, so that they form a rigid support for the seat 14 in the basic position shown in FIG. 3 (backrest in front), which is further supported by the nose of the lever 32 is. In this position, the rear end of the seat 14 cannot therefore descend downward due to the support. Rather, a rigid triangular combination of seat 14, support from levers 30, 32 and mechanical housing 12 is formed. As a result, the synchronous mechanism in the foremost position of the backrest 16 is rendered ineffective.
- Fig. 3 shows an embodiment in which the pivot plate 36 is connected to the pull lever 38 in a link 40 such that the connecting line of link 40 and attachment of the lower ends of the support arms 18 on the pivot plate on the support arms 18 is perpendicular.
- the pivot plate 36 further carries at its rear upper end in recesses 42 a cross bar 50 as the point of engagement of a compression spring 46 (see below) which presses the backrest 16 forward.
- the swivel plate has three transverse holes 44 at the front, with the aid of which, according to the wishes of the user, different backrest positions can be fixed by a pin guided in the mechanical housing.
- the pull lever 38 has the effect that when the user leans against the backrest 16, pushes it backwards and thus pivots the support arms 18 clockwise about the first transverse axis 24, the pivot plate 36 via the pull lever 38 on the third transverse axis 28 pulls, the angle between the levers 30, 32 is increasingly reduced and after the pivoting of the support arms 18 by a few degrees, the rigid support of the seat 14 on the mechanical housing 12 is released.
- the seat 14 is now released and can move through the synchronous mechanism coupled to the backrest with its rear section pivoting downward about the second transverse axis 26 when the backrest 16 is pivoted further backward.
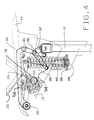
- Fig. 4 now shows, in addition, a compression spring 46 in the form of a mechanical coil spring, which is set axially parallel to the axis of the chair foot 10 in front of this in a corresponding receptacle 48 of the mechanism housing 12 and with its upper end on a cross bar 50 and via this on the swivel plate 36 and thus engages on the backrest 16 via the support arms 18, which is therefore pressed forward by the compression springs 46. If the user of the chair leans against the backrest 16, the compression spring designed as a mechanical coil spring is compressed accordingly between the crossbar 50 and its receptacle 48 and thus progressively increases its restoring force on the backrest in accordance with the spring constant.
- a compression spring 46 in the form of a mechanical coil spring, which is set axially parallel to the axis of the chair foot 10 in front of this in a corresponding receptacle 48 of the mechanism housing 12 and with its upper end on a cross bar 50 and via this on the swivel plate 36 and thus engages on
- a compression spring 52 in the form of a mechanical coil spring can be seen, which is inserted between a first linkage 54 on the mechanical housing 12, and a second linkage 56 on the seat support 34, which is in the region of the first transverse axis 24 on the underside of the Seat 14 is provided.
- the compression spring 52 thus serves to press the seat 14 upward about the second transverse axis 26, that is to say to pivot it counterclockwise in FIG. 4.
- the exemplary embodiments shown in FIG. 4 for the springs 46, 52 are only two examples of numerous possibilities for spring loading of the seat 14 and backrest 16 with which these are held in the basic position. It is also clear that the compression spring 46 not only brings the backrest into the foremost position, but at the same time also ensures that in this position the rigid support from the levers 30 and 32 is again set up when this by pivoting the backrest to the rear once resolved in the manner discussed above.
Landscapes
- Health & Medical Sciences (AREA)
- Dentistry (AREA)
- General Health & Medical Sciences (AREA)
- Chairs Characterized By Structure (AREA)
- Chairs For Special Purposes, Such As Reclining Chairs (AREA)
- Chair Legs, Seat Parts, And Backrests (AREA)
Description
- Die Erfindung betrifft einen mehrfach verstellbaren, an die Körpergröße anpaßbaren Stuhl, insbesondere Drehstuhl, bei dem die vom Sitz unabhängige Rückenlehne von zwei Tragarmen gehalten ist, die sich ausgehend von einer ersten Querachse unterm Sitz seitlich von diesem nach hinten oben erstrecken und längenveränderlich so wie in unterschiedlichen Längen durch eine Arretiervorrichtung feststellbar sind.
- Ein Stuhl dieser Art ist bekannt aus der DE 33 23 171 A1. Der bekannte Stuhl hat bereits eine verstellbare Sitzhöhe. Überdies wird durch die hier einen Winkel von 30° mit der Horizontalen bildenden, als Hohlrohr ausgeführten Tragarme erreicht, daß bei einer Anhebung der Höhe der Rückenlehne über dem Sitz gleichzeitig die Sitztiefe zunimmt. Im übrigen sind bei diesem vorbekannten Stuhl weder die Rückenlehne noch der Sitz kippbar.
- Bekannt sind überdies schon Permanentmechaniken und Synchronmechaniken. Bei der Permanentmechanik ist der Sitz starr mit dem Stuhlfuß verbunden, also nicht kippbar, während die Rückenlehne gegen die Wirkung einer Feder kippbar am Stuhlfuß befestigt ist. Es kann somit bei der Permanentmechanik die Rückenlehne unabhängig vom Sitz optimal auf den Rücken abgestimmt werden. Da der starre Sitz aber Bewegungen der Rückenlehne nicht mitmacht, treten auch erhebliche Nachteile auf. Bei der Synchronmechanik sind Sitz und Rückenlehne so gekoppelt, daß beim Zurückführen der Rückenlehne auch der Sitz nach hinten abgekippt wird. Das führt aber dazu, daß bei Synchronmechaniken der Sitzgewichtsanteil auch in vorderer Sitzposition die Rückenlehne bereits nach hinten abkippen läßt, so daß sie ihre stützende Wirkung verliert.
- Um diesen Nachteil zu vermeiden, ist es schon bekannt (DE GM 85 29 663) zwischen den Träger der Rückenlehne und den Träger des Sitzes Hebel und eine zusätzliche Feder anzuordnen, die der Rückenlehne in der Ruhestellung einen vergrößerten Widerstand gegen das Verschwenken verleiht.
- Bekannt ist auch schon ein Stuhl mit Synchronmechanik (DE 38 17 761 C2), bei dem die Rückenlehne von zwei beidseits des Sitzes unter etwa 40° nach hinten oben verlaufenden Tragarmen gehalten ist, die in ihrem vordersten Bereich, also unter der Vorderkante des Sitzes am starren Sitzträger schwenkbar gelagert sind. Dabei ist zwischen dieser Schwenkachse und der Verbindung der Tragarme mit der Rückenlehne eine nach unten ragende Lagerlasche vorgesehen, an der der Sitz mit seinem mittleren Bereich drehbar gelagert ist.
- Schließlich ist es auch bekannt (DE 40 18 436 A1), bei Stühlen, deren Rückenlehne über schräg nach hinten oben verlaufende Tragarme getragen wird, mit diesen Tragarmen auch eine Armlehne des Stuhls zu verbinden.
- Die Erfahrung zeigt, daß das Publikum zu zahlreiche Verstellmöglichkeiten an Stühlen nicht auszunützen in der Lage ist. Weiter erscheint es wünschenswert, auch bei einem Stuhl mit Synchronmechanik den Vorteil der Permanentmechanik bezüglich einer vom Gewicht des Sitzenden unbeeinträchtigten aktiven lordosierenden Rückenabstützung aufrecht zu erhalten. Schließlich muß heute dafür gesorgt werden, daß ein und derselbe Stuhl ohne entscheidende Umkonstruktion für Personen ganz unterschiedlicher Größe (vgl. DIN 33402) geeignet ist, wobei die Kompromißwerte (DIN 4551) möglichst zu verbessern sind.
- Aufgabe der Erfindung ist es deshalb, einen Stuhl mit Synchronmechanik vorzuschlagen, bei dem Sitztiefe, Rückenlehnenhöhe und Armlehnenhöhe gleichzeitig verstellbar und die Synchronmechanik in der vorderen Sitzhaltung selbsttätig gesperrt ist, so daß die Sitzkraft nicht zu einer Verminderung der Stützwirkung der Rückenlehne auf den Rücken führt.
- Diese Aufgabe wird durch die in den Ansprüchen gekennzeichnete Erfindung gelöst.
- Man erkennt zunächst, daß die Rückenlehne von zwei am Sitz gelagerten und seitlich von diesem nach hinten oben erstreckte und längenveränderlichen Tragarmen gehaltert ist, die in unterschiedlichen Längen durch eine Arretiervorrichtung feststellbar sind. Dadurch werden Sitztiefe und Rückenlehnenhöhe gleichzeitig verstellt. Ist gemäß einem besonderen Merkmal der Erfindung der obere Teil des teleskopisch unterteilten längenveränderlichen Tragarms auch noch mit einer Armlehne versehen, dann wird überdies gleichzeitig auch die Armlehnenhöhe verstellt. Mit einer einzigen sinnfälligen Verstellung werden somit synchron die Sitztiefe, die Rückenlehnenhöhe und die Armlehnenhöhe verstellbar gemacht. Dadurch kann überdies auch eine einzige Stuhlkonstruktion einem äußerst weiten Bereich von Benutzergrößen zugänglich gemacht werden, da sich ein besonders großer Größenveränderungsbereich ergibt.
- Dieser Größenveränderungsbereich wird entscheidend davon geprägt, daß die Tragarme in der Ruhestellung mit der Horizontalen einen Winkel von mindestens 45°, vorzugsweise über 50° und zumindest nahezu 52° bilden. Denn dadurch wird normgerecht ein Höhenverstellbereich des oberen Abstützpunktes des Beckenkammes von 180 - 230 mm erreicht. Gleichzeitig hat die Armlehne einen Höhenverstellungsbereich von 200 bis 260 mm über dem Einsitzpunkt und läßt sich die Sitztiefe ebenfalls in einem weiten Bereich verändern. Bei der angegebenen steilen Stellung der Tragarme liegt der optimale Anlenkpunkt für deren untere Enden in einem Abstand von einem Drittel der Sitztiefe vom vorderen Sitzrand.
- Zur Erzielung der erwünschten Synchronmechanik ist zunächst einmal der Sitz auf übliche Weise an seinem vorderen Ende um eine horizontale Achse schwenkbar in dem Mechanikgehäuse gelagert. Auch wird der Sitz ebenso durch eine Feder nach oben gedrückt, wie eine weitere Feder die Rückenlehne nach vorne drückt. Entscheidend ist aber nun, daß in der normalen aufrechten Stellung der Rückenlehne die Synchronmechanik dadurch unwirksam gemacht wird, daß zwischen Mechanikgehäuse und Sitz in Abstand von der Schwenkachse des Sitzes eine starre Abstützung eingestellt wird. Diese wird so ausgebildet, daß sie erst bei einer deutlichen und absichtlichen Auslenkung der Rückenlehne durch den Benutzer nach hinten aufgelöst wird und dann die Synchronmechanik wirksam werden läßt. Zunächst ist durch die starre Abstützung aber keine Rückwirkung der Belastung des Sitzes durch den Benutzer auf die Rückenlehne gegeben. Diese schwenkt beim Hinsetzen des Benutzers weder nach hinten weg, noch wird die Kraft der die Rückenlehne nach vorne drückenden Feder vermindert. Somit sind tatsächlich die Vorteile der Permanentmechanik und der Synchronmechanik bei einfacher Verstellmöglichkeit in einem Stuhl kombiniert.
- Es ist weiter entscheidend, daß dies mit einer unkomplizierten Mechanik erreicht wird. Dabei kommt es entscheidend auch auf die einfache Konstruktion der starren Abstützung des Sitzes in vorderster Stellung der Rückenlehne an. Diese erfolgt über zwei Hebel, die miteinander in einer Achse gelenkig verbunden und mit ihren jeweils anderen Enden der eine an der Unterseite des Sitzes, der andere an dem Mechanikgehäuse oder am Stuhlfuß angelenkt sind. Die beiden Hebel sollen dabei in der Ruhestellung miteinander fluchten, so daß sie ein starres Abstützglied bilden. In der die beiden Hebel gelenkig verbindenden Querachse greift nun direkt, in der Regel aber indirekt, das untere Ende der Tragarme an, die unterm Sitz gelenkig gelagert sind. Wenn sich nun der Benutzer auf dem zunächst starr abgestützten Sitz nach hinten lehnt und dabei durch den Druck auf die Rückenlehne auch die Tragarme verschwenkt, ziehen diese an der die beiden fluchtenden Hebel verbindenden Querachse, heben so die Abstützung des Sitzes nach einem gewissen Schwenkwinkel und allmählich auf, so daß der Stuhl dann funktioniert, wie ein Stuhl mit üblicher Synchronmechanik.
- Die Konstruktion wird dann besonders einfach, wenn für diesen Zweck die Tragarme über ihre Anlenkung unter dem Sitz hinaus verlängert werden und je eine Schwenkplatte tragen, die selbst direkt oder vorzugsweise über einen weiteren, einerseits an der Schwenkplatte und andererseits an der Querachse zwischen den beiden Hebeln der Abstützung angelenkten Zughebel mit dieser verbunden ist und sie dadurch auflöst bzw. aufstellt.
- Die gesamte erläuterte Kinematik ist dabei frei von Kraftanlenkungen. Selbstverständlich wird aber, wie oben schon angegeben, auch bei diesem Stuhl durch je eine Feder der Sitz nach oben und die Rückenlehne nach vorne gedrückt. Dabei wird die den Sitz nach oben drückende Feder zwischen das als Träger fungierende Mechanikgehäuse und den Sitz eingesetzt, wobei der Angriffspunkt dieser den Sitz nach oben drückenden Feder in der Nachbarschaft der hoch unterm Sitz im Drittelabstand von seinem Vorderrand angeordneten Querachse liegen soll.
- Es liegt auf der Hand, daß auch die Feder für das Nachvornedrücken der Rückenlehne zweckmäßig in dem tragenden Mechanikgehäuse unter dem Sitz untergebracht werden muß. Man läßt sie hierzu ebenfalls an den Schwenkplatten der Tragarme angreifen. Durch entsprechende Auslegung der Anlenkung kann dabei erreicht werden, daß die Wirkrichtung der Feder im fraglichen Verstellbereich immer möglichst nahe der optimalen Wirkrichtung der Feder ist.
- Als Federn werden mechanische Federn verwendet, die gegenüber der nahezu linearen Kennung einer Gasfeder den Vorteil der progressiven Wirkung haben: mit zunehmender Auslenkung nimmt die Rückstellkraft zu. Das ist insbesondere bei der Rückstellkraft auf die Rückenlehne aus ergonomischen Gründen von Bedeutung.
- Schließlich wird bei dem Stuhl dem Sitz in Ruhestellung eine Neigung von 3 bis 4° nach vorne gegeben. Dies ist dann der Ausgangspunkt für die Synchronkinematik nach Auflösung der Abstützung des Sitzes, so daß eine Vorrotation des Beckens zur Aufrichtung der Wirbelsäule eingeleitet wird. Die angegebene Vorneigung ist ein Kompromiß zwischen dieser erzielten Wirkung und einer Begrenzung der Vorneigung auf einen Wert, der ein nach vorne Herunterrutschen des Benutzers von der Sitzfläche ausschließt.
- Schließlich ist noch darauf hinzuweisen, daß die für diesen Stuhl gewählte Konstruktion die Sitztiefenverstellung vom Sitzwinkel völlig unabhängig macht, so daß auch eine von der Sitztiefenverstellung unabhängige Sitzwinkelverstellung erzielt ist.
- Weitere Einzelheiten und Vorteile ergeben sich aus der folgenden Beschreibung der Zeichnung.
- Es zeigen
- Fig. 1
- eine Ausführungsform des erfindungsgemäßen Stuhls mit Veranschaulichung verschiedener Verstellmöglichkeiten
- Fig. 2
- eine Veranschaulichung des weiten Anpassungsbereiches des Stuhls an verschiedene Körpergrößen,
- Fig. 3
- eine Ausführungsform der erfindungsgemäßen Sperrung der Synchronmechanik in vorderster Position der Rückenlehne, und
- Fig. 4
- eine um Einzelheiten ergänzte Darstellung.
- Fig. 1 zeigt einen Stuhl mit einem Stuhlfuß 10, mit der starr ein Mechanikgehäuse 12 verbunden ist, das alle im folgenden erläuterten Teile nach unten abdeckt bzw. abstützt. Ein Sitz 14 ist in dem Mechanikgehäuse 12 an seinem vorderen Ende um eine Querachse schwenkbar angelenkt. Eine Rückenlehne 16 ist, wie in der Figur klar gezeigt ist, mit dem Sitz nicht unmittelbar verbunden, sondern über teleskopische Tragarme 18 mit Arretiervorrichtung 20 und Armlehnen 22. Dabei ist das untere Ende der Tragarme 18 jeweils auf einer horizontal und quer verlaufenden ersten Querachse 24 schwenkbar gelagert. Dies gilt also für den unteren oder inneren Teil des teleskopischen Tragarmes. Hingegen weist der mit der Rückenlehne verbundene obere bzw. äußere Teil der teleskopischen Tragarme 18 die Armlehne auf. Der Benutzer kann durch Betätigen der Arretiervorrichtung die starre Verbindung der beiden Teile der Tragarme 18 gegeneinander lösen und den oberen Teil der Tragarme auf die in der Figur angedeutete Weise geführt auf dem unteren Teil der Tragarme nach oben ziehen und in der gewünschten Stellung wieder festlegen.
- Dabei ist in Fig. 1 klar zu erkennen, daß mit dieser einen Betätigung die Rückenlehnenhöhe, die Armlehnenhöhe und die Sitztiefe gleichzeitig verstellt werden.
- Fig. 2 dient der Veranschaulichung der Tatsache, daß hiermit auch in einem weiten Bereich ein und dieselbe Konstruktion sehr unterschiedlichen Körpergrößen angepaßt werden kann, wie das von einem Großserienprodukt gefordert werden muß. Die Forderungen der einschlägigen Normen werden dabei bezüglich des Verstellbereiches eingehalten oder sogar erheblich ausgeweitet. Deutlich ist zu erkennen, daß selbst der Stuhl mit Armlehne, wie in Fig. 2 gezeigt, sowohl bei kleinen als auch bei großen Personen und der entsprechenden Einstellung unter die Tischkante ein ebenfalls entsprechendes der Personengröße verstellbaren Tisches paßt. Gut zu erkennen ist auf den Darstellungen von Fig. 2 auch, daß der Rücken durch die Rückenlehne eine gute Lordosenunterstützung erfährt, andererseits aber unter diesem Abstützpunkt auch für Personen unterschiedlicher Größe im Freiraum zwischen Rückenlehne und Sitz genügend Platz für das Gesäß bleibt, wie das die Forderung der Ergonomen ist. Gut erkennbar ist in Fig. 2 aufgrund der Seitenansicht auch, daß die Rückenlehne im Horizontalschnitt deutlich konkav ausgeführt ist, so daß der Körper des Sitzenden gut eingebettet wird.
- Oben wurde schon darauf hingewiesen, daß aus ergonomischen Gründen der gezeigte Stuhl zwar mit einer Synchronmechanik ausgerüstet ist, so daß bei nach hinten Kippen der Rückenlehne 16 auch der hintere Rand des Sitzes 14 gleichzeitig nach unten wegkippt, dabei aber diese übliche Funktion der Synchronmechanik in der vordersten Stellung der Rückenlehne 16 zunächst gesperrt ist.
- Fig. 3 zeigt den entsprechenden Aufbau im einzelnen. Auf dem Stuhlfuß 10 ist das Mechanikgehäuse 12 befestigt, das über die erste Querachse 24 die Tragarme 18 der (in der Figur nicht gezeigten) Rückenlehne und über eine zweite Querachse 26 den Sitz 14 hält. Die erste Querachse 24 ist bei einem Drittel der gesamten Sitztiefe und möglichst hoch, also dicht unter dem Sitz 14 anzuordnen. Die zweite Querachse 26 liegt im vordersten Bereich der Sitzschale 12, also an der Vorderkante des Sitzes.
- Der Sitz 14 ist, wie man das in Fig. 3 deutlich erkennen kann, etwas nach vorne geneigt. Hierfür ist er von einer Feder nach oben gedrückt, wie das unten anhand von Fig. 4 noch näher erläutert wird. Die Feder verschwenkt den Sitz 14 um die zweite Querachse 26 im Gegenuhrzeigersinn. Diese Verschwenkung wird aber begrenzt durch eine starre Abstützung aus zwei in einer dritten Querachse 28 verbundenen Hebeln. In der Figur ist klar zu erkennen, daß der etwas längere Hebel 30 an seinem oberen Ende auf der Unterseite des Sitzes 14 und in etwa vertikal über der Achse des Stuhlfußes 10 angelenkt ist und zwar an einem in dem Sitz 14 integrierten formstabilen Sitzträger 34, dessen vorderes Ende im Mechanikgehäuse 12 auf der zweiten Querachse 26 schwenkbar gelagert ist. Ebenso zeigt die Figur, daß das untere Ende des etwas kürzeren Hebels 32 etwas neben der Achse des Stuhlfußes 10 und vor dieser angelenkt ist. Der Hebel 32 stützt sich überdies mit einer nach hinten weisenden Nase oben auf dem Stuhlfuß über ein Dämpfkissen ab. Die Figur läßt insbesondere klar erkennen, daß die beiden Hebel 30, 32 annähernd miteinander fluchten, so daß sie eine starre Abstützung des Sitzes 14 in der in Fig. 3 gezeigten Grundstellung (Rückenlehne vorne) bilden, die durch die Nase des Hebels 32 noch unterstützt ist. In dieser Stellung kann also aufgrund der Abstützung das hintere Ende des Sitzes 14 nicht nach unten abtauchen. Es ist vielmehr ein starrer Dreiecksverbund von Sitz 14, Abstützung aus den Hebeln 30, 32 und Mechanikgehäuse 12 gebildet. Dadurch ist die Synchronmechanik in der vordersten Stellung der Rückenlehne 16 unwirksam gemacht.
- In Fig. 3 erkennt man nun weiter, daß die Tragarme 18 seitlich des Sitzes 14 nicht etwa in der ersten Querachse 24 enden, sondern über die erste Querachse hinaus verlängert und hier mit einer Schwenkplatte 36 drehschlüssig verbunden sind. Fig. 3 zeigt eine Ausführungsform, bei der die Schwenkplatte 36 mit dem Zughebel 38 in einer Anlenkung 40 derart verbunden ist, daß die Verbindungslinie von Anlenkung 40 und Befestigung der unteren Enden der Tragarme 18 an der Schwenkplatte auf den Tragarmen 18 senkrecht steht. Die Schwenkplatte 36 trägt weiter an ihrem hinteren oberen Ende in Ausnehmungen 42 eine Querstange 50 als Angriffspunkt einer Druckfeder 46 (siehe unten), die die Rückenlehne 16 nach vorne drückt. Schließlich hat die Schwenkplatte vorne drei Querlöcher 44, mit deren Hilfe nach Wunsch des Benutzers verschiedene Lehnenstellungen durch einen im Mechanikgehäuse geführten Stift fixiert werden können.
- Der Zughebel 38 hat die Wirkung, daß dann, wenn sich der Benutzer gegen die Rückenlehne 16 lehnt, diese nach hinten drückt und damit die Tragarme 18 im Uhrzeigersinn um die erste Querachse 24 verschwenkt, die Schwenkplatte 36 über den Zughebel 38 an der dritten Querachse 28 zieht, den Winkel zwischen den Hebeln 30, 32 zunehmend verkleinert und nach der Verschwenkung der Tragarme 18 um einige Grad somit die starre Abstützung des Sitzes 14 an dem Mechanikgehäuse 12 auflöst. Damit ist jetzt der Sitz 14 freigegeben und kann sich durch die Synchronmechanik mit der Rückenlehne gekoppelt mit seinem hinteren Abschnitt um die zweite Querachse 26 schwenkend nach unten bewegen, wenn die Rückenlehne 16 weiter nach hinten verschwenkt wird. Wie erläutert, ist dies aber in der vordersten Stellung der Rückenlehne zunächst nicht der Fall: anders als bei üblichen Synchronmechaniken sonst, wird hier also beim Niedersetzen des Benutzers auf dem Sitz 14 keine Rückwirkung auf die Rückenlehne zugelassen, die deshalb nicht schon beim Niedersetzen entgegen der angestrebten Wirkung nach hinten ausweicht.
- Fig. 4 zeigt aber nun zusätzlich eine Druckfeder 46 in Form einer mechanischen Schraubenfeder, die achsparallel zur Achse des Stuhlfußes 10 vor diesem in eine entsprechende Aufnahme 48 des Mechanikgehäuses 12 eingestellt ist und mit ihrem oberen Ende an einer Querstange 50 und über diese an der Schwenkplatte 36 und damit über die Tragarme 18 an der Rückenlehne 16 angreift, die also durch die Druckfedern 46 nach vorne gedrückt wird. Lehnt sich der Benutzer des Stuhls gegen die Rückenlehne 16, so wird die als mechanische Schraubenfeder ausgeführte Druckfeder entsprechend zwischen der Querstange 50 und ihrer Aufnahme 48 komprimiert und erhöht somit progressiv entsprechend der Federkonstante ihre Rückstellkraft auf die Rückenlehne.
- In Fig. 4 ist weiter eine Druckfeder 52 in Gestalt einer mechanischen Schraubenfeder zu erkennen, die zwischen eine erste Anlenkung 54 an dem Mechanikgehäuse 12, und eine zweite Anlenkung 56 am Sitzträger 34 eingesetzt ist, die im Bereich der ersten Querachse 24 auf der Unterseite des Sitzes 14 vorgesehen ist. Die Druckfeder 52 dient somit dazu, den Sitz 14 um die zweite Querachse 26 jeweils nach oben zu drücken, also in Fig. 4 im Gegenuhrzeigersinn zu verschwenken.
- Selbstverständlich sind die in Fig. 4 gezeigten Ausführungsbeispiele für die Federn 46, 52 nur zwei Beispiele für zahlreiche Möglichkeiten der Federbeaufschlagung von Sitz 14 und Rückenlehne 16, mit der diese in Grundstellung gehalten werden. Es ist überdies klar, daß die Druckfeder 46 nicht nur die Rückenlehne in die vorderste Stellung bringt, sondern gleichzeitig auch dafür sorgt, daß in dieser Stellung wiederum die starre Abstützung aus den Hebeln 30 und 32 aufgestellt wird, wenn diese durch Verschwenken der Rückenlehne nach hinten einmal auf die oben erläuterte Weise aufgelöst war.
- Oben wurde schon erläutert, daß die Rückenlehnenhöhe, die Armlehnenhöhe und die Sitztiefe bei dem gezeigten Stuhl synchron, also alle drei gleichzeitig verstellt und mit der Arretiervorrichtung 20 festgelegt werden. Auch die Federkennung der Druckfeder 46 für die Aufstellung der Rückenlehne 16 wird mit Hilfe des üblichen Stellrades 58 verstellt. Die Druckfeder 52 wird passend gewählt.
- Insgesamt ergibt sich bei einfacher Konstruktion ein den Normen und den Bedürfnissen der Ergonomie entsprechender und den Benutzer durch seine Verstellmöglichkeit nicht überfordernder Stuhl, der überdies für sehr unterschiedliche Körpergrößen der Benutzer in seiner Konstruktion unverändert bleiben kann.
Claims (10)
- Mehrfach verstellbarer, an die Körpergröße anpaßbarer Stuhl, insbesondere Drehstuhl, bei dem die vom Sitz (14) unabhängige Rückenlehne (16) von zwei Tragarmen (18) gehalten ist, die sich ausgehend von einer ersten Querachse (24) unterm Sitz seitlich von diesem nach hinten oben erstrecken und längenveränderlich sowie in unterschiedlichen Längen durch eine Arretiervorrichtung (20) feststellbar sind, dadurch gekennzeichnet, daß die Tragarme (18) mit der Horizontalen in der Ruhestellung einen Winkel von mindestens 45°, vorzugsweise über 50° und zumindest näherungsweise 52° bilden,
daß die erste Querachse (24) als Schwenkachse für das untere Ende der Tragarme in einem höhenverstellbaren Mechanikgehäuse (12) vor dem Stuhlfuß (10) und in einem Abstand von einem Drittel der Sitztiefe vom vorderen Sitzrand angeordnet ist,
daß der Sitz (14) an seinem vorderen Ende um eine zweite Querachse (26) schwenkbar in dem Mechanikgehäuse (12) gelagert und von einer Feder (52) nach oben beaufschlagt ist,
daß die Rückenlehne (16) über eine an den Tragarmen (18) angreifende Feder (46) nach vorne beaufschlagt ist,
und daß die Synchronkopplung von Sitz (14) und Rückenlehne (16) in der vordersten Stellung der Rückenlehne durch eine starre Abstützung (30, 32) des Sitzes (14) an der Sitzschale (12) aufgehoben ist. - Stuhl nach Anspruch 1, dadurch gekennzeichnet, daß der mit der Rückenlehne (16) verbundene Teil der teleskopisch längenveränderlichen Tragarme (18) auch eine Armlehne (22) trägt.
- Stuhl nach Anspruch 1, dadurch gekennzeichnet, daß die an Rückenlehne (16) und Sitz (14) angreifenden Federn mechanische Federn sind.
- Stuhl nach Anspruch 3, dadurch gekennzeichnet, daß die den Sitz (14) nach oben drückende Feder (52) an diesem in der Nachbarschaft der ersten Querachse (24) angreift.
- Stuhl nach einem der Ansprüche 1 bis 4, dadurch gekennzeichnet, daß die starre Abstützung des Sitzes (14) in vorderster Stellung der Rückenlehne (16) an der Sitzschale (12) über zwei Hebel (30, 32) erfolgt, die in einer dritten Querachse (28) verbunden sind, an der überdies jeweils das untere Ende des Tragarms (18) angreift.
- Stuhl nach Anspruch 5, dadurch gekennzeichnet, daß der Angriff des unteren Ende der Tragarme (18) an der dritten Querachse über einen Zughebel (38) erfolgt.
- Stuhl nach einem der Ansprüche 1 bis 6, dadurch gekennzeichnet, daß die die unteren Teile der Tragarme (18) jeweils eine Schwenkplatte (36) tragen, die an einer Verlängerung der Tragarme über die erste Querachse (24) hinaus befestigt ist.
- Stuhl nach Anspruch 6 oder 7, dadurch gekennzeichnet, daß die in etwa dreieckförmige Schwenkplatte (36) in ihrem unteren hinteren Ende eine Anlenkung (40) für den Zughebel (38) und an ihrem oberen hinteren Ende eine Ausnehmung (42) für eine Querstange (50) aufweist, an der eine die Rückenlehne beaufschlagende Druckfeder (46) angreift, die zumindest nahezu achsparallel zum Stuhlfuß (10) in das Mechanikgehäuse (12) eingestellt ist.
- Stuhl nach einem der Ansprüche 6 bis 8, dadurch gekennzeichnet, daß der obere der beiden Abstützhebel (30) am Sitz (14) zumindest nahezu in der Verlängerung der Achse des Stuhlfußes (10) angreift.
- Stuhl nach einem der Ansprüche 1 bis 9, dadurch gekennzeichnet, daß der Sitz (14) in seiner starr abgestützten Stellung gegenüber der Horizontalen um 3 bis 4 Grad nach vorne geneigt ist.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP91116685A EP0535262B1 (de) | 1991-09-30 | 1991-09-30 | Mehrfach verstellbarer, an die Körpergrösse anpassbarer Stuhl, insbesondere Drehstuhl |
| ES91116685T ES2080211T3 (es) | 1991-09-30 | 1991-09-30 | Silla adaptable a la estatura, de graduacion multiple, especialmente silla giratoria. |
| DE59107042T DE59107042D1 (de) | 1991-09-30 | 1991-09-30 | Mehrfach verstellbarer, an die Körpergrösse anpassbarer Stuhl, insbesondere Drehstuhl. |
| AT91116685T ATE131016T1 (de) | 1991-09-30 | 1991-09-30 | Mehrfach verstellbarer, an die körpergrösse anpassbarer stuhl, insbesondere drehstuhl. |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP91116685A EP0535262B1 (de) | 1991-09-30 | 1991-09-30 | Mehrfach verstellbarer, an die Körpergrösse anpassbarer Stuhl, insbesondere Drehstuhl |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0535262A1 EP0535262A1 (de) | 1993-04-07 |
| EP0535262B1 true EP0535262B1 (de) | 1995-12-06 |
Family
ID=8207225
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP91116685A Expired - Lifetime EP0535262B1 (de) | 1991-09-30 | 1991-09-30 | Mehrfach verstellbarer, an die Körpergrösse anpassbarer Stuhl, insbesondere Drehstuhl |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP0535262B1 (de) |
| AT (1) | ATE131016T1 (de) |
| DE (1) | DE59107042D1 (de) |
| ES (1) | ES2080211T3 (de) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040189073A1 (en) * | 2003-03-28 | 2004-09-30 | Donald Chadwick | Adjustable chair |
| US10485346B2 (en) * | 2018-01-22 | 2019-11-26 | Knoll, Inc. | Chair tilt mechanism |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1239451B (de) * | 1962-05-29 | 1967-04-27 | Dr Dr Hans W Juergens | Stuhl mit in der Hoehe verstellbarem Sitz und mit verstellbarer Lehne |
| US3215470A (en) * | 1964-05-22 | 1965-11-02 | Milsco Mfg Co | Seat with adjustable elements |
| DE1808395A1 (de) * | 1968-11-12 | 1970-09-03 | ||
| DE8607194U1 (de) * | 1986-03-15 | 1986-04-30 | Drabert Söhne Minden (Westf.), 4950 Minden | Sitzmöbel |
| DE3838999A1 (de) * | 1988-11-18 | 1990-05-23 | Roeder Gmbh | Stuhl, insbesondere arbeits- oder buerostuhl |
-
1991
- 1991-09-30 AT AT91116685T patent/ATE131016T1/de not_active IP Right Cessation
- 1991-09-30 EP EP91116685A patent/EP0535262B1/de not_active Expired - Lifetime
- 1991-09-30 ES ES91116685T patent/ES2080211T3/es not_active Expired - Lifetime
- 1991-09-30 DE DE59107042T patent/DE59107042D1/de not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| ATE131016T1 (de) | 1995-12-15 |
| EP0535262A1 (de) | 1993-04-07 |
| ES2080211T3 (es) | 1996-02-01 |
| DE59107042D1 (de) | 1996-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102012107778B4 (de) | Stuhl, insbesondere Bürostuhl | |
| DE69132601T2 (de) | Vorrichtung für einen neigungsverstellbaren Stuhl | |
| EP0247311B1 (de) | Stuhl | |
| AT402602B (de) | Stuhl stuhl | |
| EP2374371B1 (de) | Sitzmöbel mit einem in eine Aufstehhilfsposition schwenkbaren Sitz | |
| EP2051606B1 (de) | Sessel | |
| EP1358821B1 (de) | Stuhl mit vom Benutzergewicht abhängigen Kraftspeicher | |
| DE19830418B4 (de) | Stuhlanordnung | |
| EP2888975B1 (de) | Arbeitsstuhl mit Synchronmechanik und Biegefeder | |
| EP2070444B1 (de) | Bürostuhl | |
| EP2070446A1 (de) | Bürostuhl mit neigbarer Rückenlehne und Mitteln zur Neigungsbegrenzung der Rückenlehne | |
| EP0233974B1 (de) | Neigungsvorrichtung für Sitzmöbel | |
| EP1769704B1 (de) | Sitz-/Liegemöbel | |
| EP2670279B1 (de) | Synchronmechanik | |
| EP1903912A1 (de) | Synchronmechanik | |
| EP0535262B1 (de) | Mehrfach verstellbarer, an die Körpergrösse anpassbarer Stuhl, insbesondere Drehstuhl | |
| DE202014011308U1 (de) | Sitzmöbel | |
| DE102004012850B4 (de) | Rückenlehne für eine Sitzvorrichtung, insbesondere für einen Drehstuhl | |
| EP2477523B1 (de) | Wippmechanik für einen bürostuhl | |
| DE19700617C2 (de) | Sessel | |
| EP2111138B1 (de) | Sitzmöbel mit schwenkbarem fussteil | |
| WO2012041448A1 (de) | Synchronmechanik | |
| EP1074202B1 (de) | Sitzmöbel | |
| DE7800874U1 (de) | Hebelverstellgetriebe für Sitz-Liege-Sessel | |
| WO2012048863A1 (de) | Synchronmechanik |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH DE DK ES FR GB LI NL SE |
|
| 17P | Request for examination filed |
Effective date: 19930811 |
|
| 17Q | First examination report despatched |
Effective date: 19950410 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH DE DK ES FR GB LI NL SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Effective date: 19951206 |
|
| REF | Corresponds to: |
Ref document number: 131016 Country of ref document: AT Date of ref document: 19951215 Kind code of ref document: T |
|
| REF | Corresponds to: |
Ref document number: 59107042 Country of ref document: DE Date of ref document: 19960118 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2080211 Country of ref document: ES Kind code of ref document: T3 |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 19960116 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: PATENTANWALTSBUERO JEAN HUNZIKER |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Effective date: 19960306 |
|
| ET | Fr: translation filed | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Effective date: 19960930 Ref country code: LI Effective date: 19960930 Ref country code: GB Effective date: 19960930 Ref country code: CH Effective date: 19960930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19961001 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| BERE | Be: lapsed |
Owner name: WIESNER-HAGER MOBEL G.M.B.H. Effective date: 19960930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Effective date: 19970401 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 19960930 |
|
| NLV4 | Nl: lapsed or anulled due to non-payment of the annual fee |
Effective date: 19970401 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Effective date: 19970630 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 19971011 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20080903 Year of fee payment: 18 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20080905 Year of fee payment: 18 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20090930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100401 |