CN217947613U - 一种井盖迁移装置 - Google Patents
一种井盖迁移装置 Download PDFInfo
- Publication number
- CN217947613U CN217947613U CN202221415591.5U CN202221415591U CN217947613U CN 217947613 U CN217947613 U CN 217947613U CN 202221415591 U CN202221415591 U CN 202221415591U CN 217947613 U CN217947613 U CN 217947613U
- Authority
- CN
- China
- Prior art keywords
- clamping jaw
- power
- well lid
- linear
- linear guide
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Landscapes
- Manipulator (AREA)
Abstract
本实用新型公开了一种井盖迁移装置,用于工程机械领域,包括:移动底盘、抓持机构、卷扬动力组件以及动力绳索;移动底盘用于带动井盖迁移装置移动;抓持机构包括直线导轨,直线导轨的底部设置有动力滑轮,动力绳索绕经卷扬动力组件以及动力滑轮的下方,动力绳索通过动力滑轮承载抓持机构;卷扬动力组件用于,当对动力绳索进行卷收时,动力绳索为动力滑轮提供向上的推力,以使直线导轨带动抓持机构相对移动底盘向上运动;当对动力绳索进行卷放时,动力滑轮在重力作用下随动力绳索下降,且抓持机构在重力作用下沿直线导轨相对移动底盘向下运动;抓持机构包括抓持部,用于抓持或松开井盖,能够在对井盖进行迁移时,减少人工精力与时间。
Description
技术领域
本实用新型涉及工程机械领域,尤其涉及一种井盖迁移装置。
背景技术
在市政工程领域,由于管道的敷设,不可避免地会产生极多的检查井,而检查井的井盖通常是铸铁井盖或者混凝土制成,可分为金属井盖、高强度纤维水泥混凝土井盖、树脂井盖等。井盖还可用于遮盖道路或家中深井,防止人或者物体坠落。
目前井盖被广泛应用于街道、公路、机场等基础设施场景。当基础设施需要进行检修或作业时,一般需要把井盖从检查井搬离,将井盖暂时迁移。而井盖迁移工作一般由人工完成。
然而,一般情况下井盖不仅本身沉重,还由于道路上车辆行人的反复碾压造成井盖与检查井的贴合极为严丝合缝,人工迁移井盖时对工人的力量要求较高,迁移的过程需要耗费较多的人工精力与时间,人工迁移井盖的效率较低。
实用新型内容
本实用新型提供了一种井盖迁移装置,能够减少人工精力与时间,提高迁移井盖的效率。
本实用新型提供了一种井盖迁移装置,包括:移动底盘、抓持机构、卷扬动力组件以及动力绳索;
所述移动底盘固定于所述井盖迁移装置的底部,所述卷扬动力组件及所述抓持机构设置于所述移动底盘;所述移动底盘用于带动所述井盖迁移装置移动;
所述抓持机构包括直线导轨,所述直线导轨的底部设置有动力滑轮,所述动力绳索绕经所述卷扬动力组件以及所述动力滑轮的下方,所述动力绳索通过所述动力滑轮承载所述抓持机构;
所述卷扬动力组件用于,当对所述动力绳索进行卷收时,所述动力绳索为所述动力滑轮提供向上的推力,以使所述直线导轨带动所述抓持机构相对所述移动底盘向上运动;当对所述动力绳索进行卷放时,所述动力滑轮在重力作用下随所述动力绳索下降,且所述抓持机构在重力作用下沿所述直线导轨相对所述移动底盘向下运动;
所述抓持机构包括抓持部,用于抓持或松开井盖。
进一步的,所述抓持部包括:第一夹爪及第二夹爪;所述抓持机构还包括:连接部及直线运动模块;
所述连接部包括相对设置的第一连接部及第二连接部;
所述第一夹爪设置于所述第一连接部的外侧,所述第二夹爪设置于所述第二连接部的外侧;所述直线运动模块,设置于所述连接部且分别与所述第一夹爪以及所述第二夹爪传动连接,用于分别驱动所述第一夹爪以及第二夹爪相互靠近或相互远离。
进一步的,所述抓持机构还包括:第一旋转运动模块及第二旋转运动模块;
所述第一旋转运动模块,设置于所述第一连接部的内侧且与所述第一夹爪相连,用于带动所述第一夹爪在所述第一连接部的外侧转动;
所述第二旋转运动模块,设置于所述第二连接部的内侧且与所述第二夹爪相连,用于带动所述第二夹爪在所述第二连接部的外侧转动。
进一步的,所述第一旋转运动模块以及所述第二旋转运动模块均包括:夹爪旋转轴、夹爪安装块及夹爪旋转驱动电机;
所述夹爪旋转轴的一端设置有夹爪,另一端安装于所述夹爪安装块且设置有第一齿轮;所述夹爪旋转驱动电机固定安装于所述夹爪安装块上,且所述夹爪旋转驱动电机的驱动端设置有第二齿轮,所述第二齿轮与所述第一齿轮传动连接;
所述夹爪旋转驱动电机,用于驱动所述第二齿轮旋转以带动所述夹爪转动。
进一步的,井盖迁移装置还包括:夹爪旋转按钮;
所述夹爪旋转按钮,分别与所述第一旋转运动模块以及所述第二旋转运动模块的夹爪旋转驱动电机相连,用于控制所述夹爪旋转驱动电机以使所述第一夹爪以及所述第二夹爪旋转至抓持准备状态或折叠收纳状态。
进一步的,所述夹爪安装块设置有直线轴承;所述直线运动模块包括:基座、导向轴、夹爪直线驱动电机、丝杆、直线导轨、第一连杆以及第二连杆;
所述丝杆以所述直线导轨相互平行安装于所述基座;所述丝杆的一端设置有丝杆滑块,另一端设置有第一锥齿;所述丝杆滑块的底部与所述直线导轨滑动连接,所述丝杆滑块的顶部分别与所述第一连杆以及所述第二连杆的一端相连;所述第一连杆的另一端与所述第一旋转运动模块的夹爪安装块铰接,所述第二连杆的另一端与所述第二旋转运动模块的夹爪安装块铰接;所述导向轴相互平行固定于所述基座,且所述直线轴承套装于所述导向轴;所述夹爪直线驱动电机固定于所述基座,且所述夹爪直线驱动电机的驱动端设置有第二锥齿,所述第二锥齿与所述第一锥齿传动连接;
所述夹爪直线驱动电机用于,驱动所述丝杆滑块在所述直线导轨上滑动,并带动第一旋转运动模块的夹爪安装块以及所述第二旋转运动模块的夹爪安装块沿所述导向轴相互靠近或相互远离,以使所述第一夹爪以及所述第二夹爪相互靠近或相互远离。
进一步的,井盖迁移装置还包括:夹爪平移按钮;所述夹爪平移按钮,与所述夹爪直线驱动电机相连,用于控制所述夹爪直线驱动电机以使所述第一夹爪以及所述第二夹爪相互靠近或相互远离。
进一步的,所述移动底盘还包括连接板;
所述连接板上设置有多个与所述直线导轨相配合的直线导向件,所述直线导向件用于限定所述直线导轨沿所述直线导向件向上或向下运动。
进一步的,所述卷扬动力组件包括卷扬电机以及所述卷扬电机驱动的卷盘;所述井盖迁移装置还包括:第一导线滑轮组以及第二导线滑轮组;
所述第一导线滑轮组以及所述第二导线滑轮组分别固定安装于所述卷盘内的两侧,且所述动力绳索绕经所述第一导线滑轮组、所述第二导线滑轮组以及所述卷盘;
所述第一导线滑轮组以及所述第二导线滑轮组用于约束进入所述卷盘的所述动力绳索,以使所述卷盘对所述动力绳索进行卷收或卷放。
进一步的,井盖迁移装置还包括电机正转按钮以及电机反转按钮;
所述电机正转按钮以及所述电机反转按钮分别与所述卷扬电机相连;所述电机正转按钮用于控制所述卷扬电机正转,以使所述卷盘对所述动力绳索进行卷收;
所述电机反转按钮用于控制所述卷扬电机反转,以使所述卷盘对所述动力绳索进行卷放。
进一步的,井盖迁移装置还包括:设置于所述移动底盘的连接板上的第一限定滑轮组、第二限定滑轮组、第一转向滑轮组以及第二转向滑轮组;
所述第一限定滑轮组以及所述第二限定滑轮组,分别安装于所述卷盘的两侧,用于限定从所述卷盘两侧进入所述卷盘的所述动力绳索;
所述第一转向滑轮组以及第二转向滑轮组分别安装于所述卷盘两侧,用于引导所述动力绳索转向以使所述动力绳索绕经所述动力滑轮。
进一步的,井盖迁移装置还包括:控制把手;
所述控制把手包括握把以及多个拉杆组合,每个所述拉杆组合之间通过横杆连接,每个所述拉杆组合包括互相嵌套的多个拉杆套件;所述拉杆组件的一端与所述移动底盘铰接,另一端设置有所述握把;
所述握把,用于接收外部的力以使所述移动底盘带动所述井盖迁移装置移动,且对所述拉杆套件进行拉伸或折叠。
进一步的,所述拉杆组件中的最上层拉杆套件与所述移动底盘的连接板之间设置有气弹簧;
所述气弹簧的一端与所述最上层拉杆套件铰接,另一端与所述移动底盘的连接板铰接。
进一步的,所述最上层拉杆套件设置有第一锁扣,所述移动底盘的连接板上设置有第二锁扣;
所述第一锁扣与所述第二锁扣相对应,用于当所述最上层拉杆套件靠近所述移动底盘的连接板达到预设距离时,所述第一锁扣与所述第二锁扣相互紧扣。
从以上技术方案可以看出,本实用新型具有以下优点:
本实用新型提供了一种井盖迁移装置,包括:移动底盘、抓持机构、卷扬动力组件以及动力绳索;当对动力绳索进行卷收时,动力绳索为动力滑轮提供向上的推力,以使直线导轨带动抓持机构相对移动底盘向上运动;当对动力绳索进行卷放时,动力滑轮在重力作用下随动力绳索下降,且抓持机构在重力作用下沿直线导轨相对移动底盘向下运动;抓持机构包括抓持部,用于抓持或松开井盖,能够在对井盖进行迁移时,减少人工精力与时间,提高迁移井盖的效率。
附图说明
为了更清楚地说明本实用新型中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
图1为本实用新型公开的一个井盖迁移装置的结构示意图;
图2为本实用新型公开的一个抓持机构的结构示意图;
图3为本实用新型公开的一个抓持机构的正视图;
图4为本实用新型公开的一个夹爪运动模块示意图;
图5为本实用新型公开的一个夹爪旋转运动模块示意图;
图6为本实用新型公开的一个抓持机构的侧视图;
图7为本实用新型公开的另一抓持机构的结构示意图;
图8为本实用新型公开的另一抓持机构的正视图;
图9为本实用新型公开的另一抓持机构的侧视图;
图10为本实用新型公开的一个夹爪直线运动模块示意图;
图11为本实用新型公开的另一夹爪旋转运动模块示意图;
图12为本实用新型公开的一个移动底盘的结构示意图;
图13为本实用新型公开的一个移动底盘与抓持机构的配合示意图;
图14为本实用新型公开的一个绳驱系统的结构示意图;
图15为本实用新型公开的另一绳驱系统的结构示意图;
图16为本实用新型公开的另一绳驱系统的结构示意图;
图17为本实用新型公开的一个卷盘的结构示意图;
图18为本实用新型公开的一个拉杆组合的结构示意图;
图19为本实用新型公开的一个井盖迁移装置的工作状态示意图;
图20为本实用新型公开的一个井盖迁移装置的收纳状态示意图。
具体实施方式
为了使本技术领域的人员更好地理解本申请方案,下面将结合本实用新型中的附图,对本实用新型中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
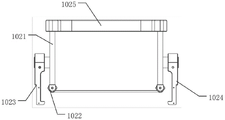
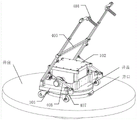
现有的井盖迁移工作一般由人工完成,一般情况下井盖不仅本身沉重,还由于道路上车辆行人的反复碾压造成井盖与检查井的贴合极为严丝合缝,人工迁移井盖时对工人的力量要求较高,迁移的过程需要耗费较多的人工精力与时间,人工迁移井盖的效率较低。因此,本实用新型提供的了一种井盖迁移装置,能够较为轻松地对井盖进行迁移节约人力和时间,具体如图1所示:
本实用新型提供的一种井盖迁移装置,包括:移动底盘101、抓持机构102以及绳驱系统,其中绳驱系统包括卷扬动力组件103、动力绳索104以及若干滑轮;
移动底盘101固定于井盖迁移装置的底部,卷扬动力组件103及抓持机构102设置于移动底盘101;移动底盘101用于带动井盖迁移装置移动。可以理解的是,该移动底盘101作为支撑卷扬动力组件103以及抓持机构102的架构,可带动井盖迁移装置进行整体移动,该移动底盘101优选为四轮系统,每个轮子可为主动轮或被动轮。该井盖迁移装置可以称为井盖迁移辅助装置。
该抓持机构102包括有直线导轨1021,该直线导轨1021固定于抓持机构102上。该直线导轨1021的底部设置有动力滑轮1022,动力绳索104绕经卷扬动力组件103以及动力滑轮1022的下方,动力绳索104通过动力滑轮1022承载抓持机构102;可以理解的是,动力绳索104按一定的顺序绕经卷扬动力组件103、动力滑轮1022以及绳驱系统的若干滑轮,抓持机构102整体悬挂在动力绳索104上。
抓持机构102包括抓持部,用于抓持或松开井盖。可以理解的是,该抓持部可以为磁力吸盘、负压吸盘或夹爪,具体此处不做限定;磁力吸盘可对以磁性材料制造的井盖进行抓取和释放,负压吸盘可对井盖进行抓取或释放。抓持机构102可实现对井盖或其他目标抓持物的抓持和松开,且抓持机构102相对移动底盘101存在一个竖直方向的运动自由度。卷扬动力组件103对动力绳索104进行卷收或卷放时,抓持机构102相对于移动底101在竖直方向上升或下降。具体的,卷扬动力组件103用于,当对动力绳索104进行卷收时,动力绳索104为动力滑轮1022提供向上的推力,以使直线导轨1021带动抓持机构102相对移动底盘101向上运动;当对动力绳索104进行卷放时,动力滑轮1022在重力作用下随动力绳索104下降,且抓持机构102在重力作用下沿直线导轨1021相对移动底盘101向下运动。可以理解的是,当卷扬动力组件103对动力绳索104进行卷收时,会拉紧动力绳索104带动承载在动力绳索104上的抓持机构102向上运动;当卷扬动力组件103对动力绳索104进行卷放时,会松弛动力绳索104,此时承载在动力绳索104上的抓持机构102会在自身的重力作用下下降。
可以理解的是,井盖迁移实现过程中,首先是移动底盘101运载抓持机构102运动到井盖上方,接着绳驱系统控制卷扬动力组件103对动力绳索104进行卷放,抓持机构102在自身重力作用下相对移动底盘101在竖直方向下降一定高度直到可以对井盖进行抓持;当抓持机构102抓持住井盖后,绳驱系统控制卷扬动力组件103对动力绳索104进行卷收,使得抓持机构102相对移动底盘101在竖直方向上升一定高度直到井盖脱离井口;最后移动底盘101运载抓持机构102连同被抓持的井盖迁离井口处。井盖迁移恢复过程中,首先移动底盘101运载抓持机构102连同被抓持的井盖运动到井口上方,并使井盖对准井口;接着绳驱系统控制卷扬动力组件103对动力绳索104进行卷放,抓持机构102在自身及井盖重力作用下相对移动底盘101在竖直方向下降一定高度,直到井盖与井口完成配合后抓持机构102松开井盖。
本实用新型提供了一种井盖迁移装置,包括:移动底盘、抓持机构、卷扬动力组件以及动力绳索;当对动力绳索进行卷收时,动力绳索为动力滑轮提供向上的推力,以使直线导轨带动抓持机构相对移动底盘向上运动;当对动力绳索进行卷放时,动力滑轮在重力作用下随动力绳索下降,且抓持机构在重力作用下沿直线导轨相对移动底盘向下运动;抓持机构包括抓持部,用于抓持或松开井盖,能够在对井盖进行迁移时,减少人工精力与时间,可降低工人作业劳动强度及提高工人作业效率。
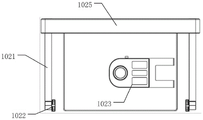
进一步的,如图2、图3及图4所示,该抓持部优选为夹爪,该抓持部包括:第一夹爪1023及第二夹爪1024;可以理解的是,第一夹爪1023及第二夹爪1024分别可以表示一个或多个夹爪,具体此处不做限定。该抓持机构102还包括:连接部1025及直线运动模块1026。该连接部1025主要为抓持机构102的框架外壳,包括相对设置的第一连接部及第二连接部;该第一连接部及第二连接部可以为连接部1025上对称的前后两侧或对称的左右两侧,具体此处不做限定。该第一夹爪1023设置于第一连接部的外侧,第二夹爪1024设置于第二连接部的外侧。该直线运动模块1026,设置于连接部1025且分别与第一夹爪1023以及第二夹爪1024传动连接,用于分别驱动第一夹爪1023以及第二夹爪1024相互靠近或相互远离。可以理解的是,第一夹爪1023以及第二夹爪1024可以分别装配于连接部1025左右两侧,每一个夹爪存在一个直线运动自由度,该直线运动自由度通过直线运动模块实现,使第一夹爪1023以及第二夹爪1024相互靠近或相互远离,当一夹爪1023以及第二夹爪1024相互靠近时为抓持状态,当第一夹爪1023以及第二夹爪1024相互远离时为松开状态。
进一步的,每个夹爪还存在一个旋转自由度,该旋转自由度通过旋转运动模块实现。具体的,该抓持机构102还包括:第一旋转运动模块1027及第二旋转运动模块1028;该第一旋转运动模块1027,设置于第一连接部的内侧且与第一夹爪1023相连,用于带动第一夹爪1023在第一连接部的外侧转动。第二旋转运动模块1028,设置于第二连接部的内侧且与第二夹爪1024相连,用于带动第二夹爪1024在第二连接部的外侧转动。可以理解的是,旋转自由度使得夹爪可垂直于地面或平行于地面,当夹爪垂直于地面时,为抓持准备状态,当夹爪平行于地面时,为折叠收纳状态。
进一步的,如图5、图6、图7、图8及图9所示,第一旋转运动模块以及第二旋转运动模块1028相同,均包括:夹爪旋转轴201、夹爪安装块202及夹爪旋转驱动电机203;夹爪旋转轴201的一端设置有夹爪,另一端安装于夹爪安装块202且设置有第一齿轮204;夹爪旋转轴201可基于夹爪安装块202带动夹爪进行自由转动。夹爪旋转驱动电机203可通过支架固定安装于夹爪安装块202上,且夹爪旋转驱动电机203的驱动端设置有第二齿轮205,第二齿轮205与第一齿轮204传动连接。该夹爪旋转驱动电机203,用于驱动第二齿轮205旋转以带动夹爪转动。可以理解的是,夹爪旋转驱动电机203的轴端装配有第二齿轮205,第一齿轮204与第二齿轮205配合,当夹爪旋转驱动电机203运行时,通过第二齿轮205和第一齿轮204的啮合传动,夹爪相应做旋转运动,转动至抓持准备状态或折叠收纳状态。
进一步的,井盖迁移装置还包括:夹爪旋转按钮;该夹爪旋转按钮,分别与第一旋转运动模块1027以及第二旋转运动模块1028的夹爪旋转驱动电机203相连,用于控制夹爪旋转驱动电机203以使第一夹爪1023以及第二夹爪1024旋转至抓持准备状态或折叠收纳状态。一般情况下,该夹爪旋转按钮同时控制第一旋转运动模块1027以及第二旋转运动模块1028的夹爪旋转驱动电机203,使得第一夹爪1023以及第二夹爪1024运动后的状态保持同步,同为抓持准备状态或折叠收纳状态。
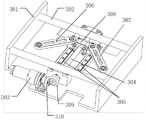
进一步的,如图5、图10及图11所示,夹爪的旋转运动模块的夹爪安装块202设置有直线轴承206,且直线轴承206与夹爪旋转轴201轴线平行。而直线运动模块包括:基座301、导向轴302、夹爪直线驱动电机303、丝杆304、直线导轨305、第一连杆306以及第二连杆307。丝杆304以及直线导轨305相互平行安装于基座301;其中,丝杠304通过两端支撑块固定于基座301,直线导轨305固定于基座301并且直线方向与丝杠304轴向平行。丝杆304的一端设置有丝杆滑块308,另一端设置有第一锥齿309。丝杆滑块308的底部与直线导轨305滑动连接,优选的,当直线导轨305为两条平行导轨时,丝杆滑块308,与丝杆304相配合,下侧左右对称设置直线滑块,而直线滑块分别与左右对称布置的直线导轨305配合。丝杆滑块308的顶部分别与第一连杆306以及第二连杆307的一端相连;具体的,丝杆滑块308上侧左右对称设置第一连杆306以及第二连杆307,第一连杆306一端与丝杠滑块308左侧通过铰链的方式连接,第二连杆307一端与丝杠滑块308右侧通过铰链的方式连接。第一连杆306的另一端与第一旋转运动模块1027的夹爪安装块铰接,第二连杆307的另一端与第二旋转运动模块1028的夹爪安装块铰接。
导向轴302相互平行固定于基座301,且直线轴承206套装于导向轴302;导向轴302分别与第一旋转运动模块1027、第二旋转运动模块1028的直线轴承206配合,即旋转运动模块整体可沿导向轴302方向直线滑动。夹爪直线驱动电机303通过支座固定于基座301,且夹爪直线驱动电机303的驱动端设置有第二锥齿310,第二锥齿310与第一锥齿309传动连接。夹爪直线驱动电机303用于,驱动丝杆滑块308沿着丝杆304轴线方向在直线导轨305上滑动,通过第一连杆306以及第二连杆307的作用带动第一旋转运动模块1027的夹爪安装块以及第二旋转运动模块1028的夹爪安装块沿导向轴302相互靠近或相互远离,以使第一夹爪1023以及第二夹爪1024相互靠近或相互远离。
进一步的,井盖迁移装置还包括:夹爪平移按钮;该夹爪平移按钮,与夹爪直线驱动电机303相连,用于控制夹爪直线驱动电机303以使第一夹爪1023以及第二夹爪1024相互靠近或相互远离。可以理解的是,夹爪平移按钮与夹爪直线驱动电机303相连可以是有线或无线连接,具体此处不做限定。夹爪平移按钮可向夹爪直线驱动电机303发送指令驱动夹爪直线驱动电机303。
进一步的,如图12及图13所示,移动底盘还包括连接板1011;且连接板1011上设置有多个与直线导轨1021相配合的直线导向件1012,直线导向件1012用于限定直线导轨1021沿直线导向件1012向上或向下运动。优选的,移动底盘还包括有四个万向轮,四个万向轮前后、左右对称布置固定安装于连接板1011;且四个万向轮可替换成独立驱动的四个麦克纳姆轮。抓持机构102可对称设置有4条直线导轨1021,数量为4的直线导轨1021相对连接部1025左右、前后对称布置,每根直线导轨1021的一端固定于连接部1025,另一端装配动力滑轮1022,并且4根直线导轨1021分别与安装在移动底盘连接板1011上的直线导向件1012相互配合,以实现抓持机构102整体可相对移动底盘在垂直方向上升或下降。
进一步的,如图14所示,卷扬动力组件103包括卷扬电机1031以及卷扬电机1031驱动的卷盘1032;井盖迁移装置中绳驱系统还包括:第一导线滑轮组1033以及第二导线滑轮组1034;该第一导线滑轮组1033以及第二导线滑轮组1034分别包括多个导线滑轮。第一导线滑轮组1033以及第二导线滑轮组1034分别固定安装于卷盘1032内的两侧,且动力绳索104绕经第一导线滑轮组1033、第二导线滑轮组1034以及卷盘1032;第一导线滑轮组1033以及第二导线滑轮组1034用于约束进入卷盘1032的动力绳索104,以使卷盘1032对动力绳索104进行卷收或卷放。在一种可实现方式中,卷盘包括第一卷盘、第二卷盘,导线滑轮包括:第一导线滑轮、第二导线滑轮、第三导线滑轮及第四导线滑轮;4组导线滑轮夹于第一卷盘及第二卷盘之间,第一导线滑轮与第二导线滑轮组合可对进入卷盘一端的动力绳索104形成约束,第三导线滑轮及第四导线滑轮组合可对进入卷盘另一端的动力绳索104进行约束;当卷盘整体转动时,可对动力绳索104进行卷收或卷放。
进一步的,井盖迁移装置还包括电机正转按钮以及电机反转按钮;电机正转按钮以及电机反转按钮分别与卷扬电机1031相连;电机正转按钮用于控制卷扬电机1031正转,以使卷盘1032对动力绳索104进行卷收;电机反转按钮用于控制卷扬电机1031反转,以使卷盘1032对动力绳索104进行卷放。可以理解的是,当卷扬电机1031正转时,导线滑轮组约束动力绳索104缠绕在卷盘1032上,当卷扬电机1031反转时,动力绳索104从卷盘1032伸出。
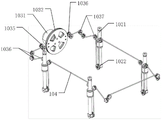
进一步的,如图15、图16及图17所示,井盖迁移装置还包括:设置于移动底盘的连接板上的第一限定滑轮组1035、第二限定滑轮组1036、第一转向滑轮组1037以及第二转向滑轮组1038;该限定滑轮组以及转向滑轮组分别可包括多个滑轮。第一限定滑轮组1035以及第二限定滑轮组1036,分别安装于卷盘1032的两侧,用于限定从卷盘1032两侧进入卷盘的动力绳索104;第一转向滑轮组1037以及第二转向滑轮组1038分别安装于卷盘1032两侧,用于引导动力绳索104转向以使动力绳索104绕经动力滑轮1022。
可以理解的是,可以在卷盘1032左右两侧布置4组限定滑轮,卷盘1032一侧的第一限定滑轮和第二限定滑轮组合可对该侧动力绳索104进行限定,卷盘1032另一侧的第三限定滑轮和第四限定滑轮组合可对该侧动力绳索104进行限定;4组限定滑轮均安装于移动底盘连接板。优选的,在移动底盘连接板4个转角处分别设置安装两组转向滑轮,第一转向滑轮和第二转向滑轮,以引导动力绳索104转变方向;优选的,抓持机构102每根直线导轨1021两侧设置第三转向滑轮和第四转向滑轮,以引导动力绳索104转变方向。
动力绳索104按圆周方向依次绕经卷盘1032、导线滑轮、限定滑轮、转向滑轮、直线导轨一端的动力滑轮1022形成闭环。当卷盘1032对动力绳索104进行卷收时,第三转向滑轮及第四转向滑轮与动力滑轮1022之间的绳索变短,直线导轨1021沿移动底盘连接板上的直线导向件向上运动,从而带动抓持机构102整体相对移动底盘竖直向上移动;当卷盘1032对动力绳索104进行卷放时,在抓持机构102和/或井盖重力作用下,第三转向滑轮及第四转向滑轮与动力滑轮1022之间的绳索变长,直线导轨1021沿移动底盘连接板上的直线导向件向下运动,从而带动抓持机构102整体相对移动底盘竖直向下移动。优选的,卷扬动力组件数量为2,左右对称布置固定连接于移动底盘连接板;在一种可选的方式中,在上述基础上去除移动底盘连接板一侧的卷扬动力组件、限定滑轮也能实现抓持机构相对移动底盘在竖直方向的上升或下降。
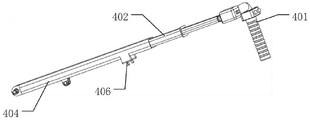
进一步的,如图18、图19及图20所示,井盖迁移装置还包括:控制把手;控制把手包括握把401以及多个拉杆组合402,每个拉杆组合402之间通过横杆403连接,每个拉杆组合402包括互相嵌套的多个拉杆套件404;拉杆组件402的一端与移动底盘101铰接,另一端设置有握把401;握把401用于接收外部的力以使移动底盘101带动井盖迁移装置移动,且可以对拉杆套件404进行拉伸或折叠。在一种可实现的方式中,控制把手可以包括第一拉杆组合和第二拉杆组合,第一拉杆组合与第二拉杆组合相对于移动底盘左右对称布置;拉杆组合包括第一拉杆套件、第二拉杆套件、第三拉杆套件及握把,第二拉杆套件嵌套于第一拉杆套件、第三拉杆套件嵌套于第二拉杆套件,握把装配于第三拉杆套件一端;第二拉杆套件可在第一拉杆套件内滑动,第三拉杆套件可在第二拉杆套件内滑动,拉杆组合整体具有伸缩功能。第一拉杆组合中第一拉杆套件一端及第二拉杆组合中第一拉杆套件一端分别与移动底盘连接板左右两侧铰接,第一拉杆组合中第一拉杆套件另一端及第二拉杆组合中第一拉杆套件另一端通过横杆连接。
进一步的,拉杆组件中的最上层拉杆套件与移动底盘的连接板之间设置有气弹簧405;气弹簧405的一端与最上层拉杆套件铰接,另一端与移动底盘的连接板铰接。该最上层拉杆套件指的是拉杆组合中直径最大的拉杆套件,且嵌套完后处于最上层。在一种可实现的方式中,在第一拉杆组合中第一拉杆套件与移动底盘连接板之间设置气弹簧405,气弹簧405的一端与第一拉杆组合的第一拉杆套件中部铰接,另一端与移动底盘连接板铰接;在第二拉杆组合中的第一拉杆套件与移动底盘连接板之间设置气弹簧405,气弹簧405的一端与第二拉杆组合中的第一拉杆套件中部铰接,另一端与移动底盘连接板铰接。
进一步的,最上层拉杆套件设置有第一锁扣406,移动底盘的连接板上设置有第二锁扣407;第一锁扣406与第二锁扣407相对应,用于当最上层拉杆套件靠近移动底盘的连接板达到预设距离时,第一锁扣406与第二锁扣407相互紧扣。可以理解的是,该预设距离指的是第一锁扣406与第二锁扣407相互接触的距离。在一种可实现方式中,在第一拉杆组合的第一拉杆套件与移动底盘连接板之间设置锁扣,锁扣A部分与第一拉杆组合的第一拉杆套件固定连接,锁扣B部分与移动底盘连接板固定连接;在第二拉杆组合的第一拉杆套件与移动底盘连接板之间设置锁扣,锁扣A部分与第二拉杆组合的第一拉杆套件固定连接,锁扣B部分与移动底盘连接板固定连接。操作人员可以通过握把调整拉杆组合使其与地面成一定角度并且使拉杆组合伸长到合适位置,以便操作人员进行井盖迁移操作,此时气弹簧伸长至最长状态,锁扣AB两部分离;通过握把调整拉杆组合使其与地面平行并且使拉杆组合缩短至最短状态,以便井盖迁移辅助装置收纳,此时气弹簧缩短至最短状态,锁扣AB两部扣合。
优选的,上述的夹爪旋转按钮、夹爪平移按钮、电机正转按钮以及电极反转按钮设置于井盖迁移装置的握把上。井盖迁移的过程可以为:井盖迁移装置初始状态为收纳状态,首先通过握把调整拉杆组合完成锁扣AB两部分离、气弹簧伸长至最长状态、拉杆组合与地面成一定角度并伸长到合适位置,以便操作人员进行井盖迁移操作;接着,操作人员通过控制握把上的电机正转按钮控制卷扬动力组件对动力绳索进行卷收,使得抓持机构相对移动底盘上升一定高度后,通过夹爪旋转按钮以及夹爪平移按钮将第一夹爪和第二夹爪由平行于地面的状态调整为垂直于地面状态、由相互靠近状态调整为相互远离的状态,即做好抓持井盖的准备。下一步,操作人员通过控制握把将井盖迁移装置移动至井盖上方,并将第一夹爪和第二夹爪对准井盖被抓持部位;下一步,操作人员通过控制握把上的电机反转按钮控制卷扬动力组件对动力绳索进行卷放,在自身重力作用下,抓持机构相对移动底盘在竖直方向下降一定高度直到夹爪能够抓持住井盖,并通过夹爪平移按钮控制第一夹爪和第二夹爪相互靠近进而对井盖完成夹持;下一步,操作人员通过控制握把上的电机正转按钮控制卷扬动力组件对动力绳索进行卷收,使得抓持机构连同被抓持的井盖相对移动底盘上升一定高度直到井盖脱离井口;最后,操作人员通过控制握把移动井盖迁移装置将井盖迁移出井口位置。可以理解的是,按下电机正转按钮可以控制卷扬动力组件会对动力绳索进行卷收;按下电机反转按钮可以控制卷扬动力组件会对动力绳索进行卷放;同时松开或同时按下电机正转按钮、电机反转按钮,卷扬电机均保持停止转动状态。
将井盖迁移回井口时,首先操作人员通过控制握把移动辅助装置将被抓持的井盖迁移至井口上方,并使井盖对准井口;接着通过控制握把上的电机反转按钮控制卷扬动力组件对动力绳索进行卷放,抓持机构在自身及井盖重力作用下相对移动底盘在竖直方向下降一定高度,直到井盖与井口完成配合后,通过夹爪平移按钮控制第一夹爪和第二夹爪相互远离,抓持机构松开井盖,并且控制电机正转按钮控制卷扬动力组件对动力绳索进行卷收,抓持机构相对移动底盘上升一定高度后第一夹爪和第二夹爪与井盖彻底分离。
完成井盖迁移任务后,通过控制握把上的电机正转按钮将抓持机构相对移动底盘上升至一定高度,并控制夹爪旋转按钮以及夹爪平移按钮将第一夹爪和第二夹爪由垂直于地面状态调整为平行于地面状态、由相互远离的状态调整为相互靠近状态,即调整抓持机构呈收纳状态后,再通过电机反转按钮控制卷扬动力组件对动力绳索进行卷放,抓持机构相对移动底盘下降至最低状态;下一步,通过控制握把,调整拉杆组合完成气弹簧缩短至最短、锁扣AB两部扣合、拉杆组合收缩至最短状态等动作,即将井盖迁移装置整体调整为收纳状态。
最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
Claims (14)
1.一种井盖迁移装置,其特征在于,包括:移动底盘、抓持机构、卷扬动力组件以及动力绳索;
所述移动底盘固定于所述井盖迁移装置的底部,所述卷扬动力组件及所述抓持机构设置于所述移动底盘;所述移动底盘用于带动所述井盖迁移装置移动;
所述抓持机构包括直线导轨,所述直线导轨的底部设置有动力滑轮,所述动力绳索绕经所述卷扬动力组件以及所述动力滑轮的下方,所述动力绳索通过所述动力滑轮承载所述抓持机构;
所述卷扬动力组件用于,当对所述动力绳索进行卷收时,所述动力绳索为所述动力滑轮提供向上的推力,以使所述直线导轨带动所述抓持机构相对所述移动底盘向上运动;当对所述动力绳索进行卷放时,所述动力滑轮在重力作用下随所述动力绳索下降,且所述抓持机构在重力作用下沿所述直线导轨相对所述移动底盘向下运动;
所述抓持机构包括抓持部,用于抓持或松开井盖。
2.根据权利要求1所述的井盖迁移装置,其特征在于,所述抓持部包括:第一夹爪及第二夹爪;所述抓持机构还包括:连接部及直线运动模块;
所述连接部包括相对设置的第一连接部及第二连接部;
所述第一夹爪设置于所述第一连接部的外侧,所述第二夹爪设置于所述第二连接部的外侧;所述直线运动模块,设置于所述连接部且分别与所述第一夹爪以及所述第二夹爪传动连接,用于分别驱动所述第一夹爪以及第二夹爪相互靠近或相互远离。
3.根据权利要求2所述的井盖迁移装置,其特征在于,所述抓持机构还包括:第一旋转运动模块及第二旋转运动模块;
所述第一旋转运动模块,设置于所述第一连接部的内侧且与所述第一夹爪相连,用于带动所述第一夹爪在所述第一连接部的外侧转动;
所述第二旋转运动模块,设置于所述第二连接部的内侧且与所述第二夹爪相连,用于带动所述第二夹爪在所述第二连接部的外侧转动。
4.根据权利要求3所述的井盖迁移装置,其特征在于,
所述第一旋转运动模块以及所述第二旋转运动模块均包括:夹爪旋转轴、夹爪安装块及夹爪旋转驱动电机;
所述夹爪旋转轴的一端设置有夹爪,另一端安装于所述夹爪安装块且设置有第一齿轮;所述夹爪旋转驱动电机固定安装于所述夹爪安装块上,且所述夹爪旋转驱动电机的驱动端设置有第二齿轮,所述第二齿轮与所述第一齿轮传动连接;
所述夹爪旋转驱动电机,用于驱动所述第二齿轮旋转以带动所述夹爪转动。
5.根据权利要求4所述的井盖迁移装置,其特征在于,还包括:夹爪旋转按钮;
所述夹爪旋转按钮,分别与所述第一旋转运动模块以及所述第二旋转运动模块的夹爪旋转驱动电机相连,用于控制所述夹爪旋转驱动电机以使所述第一夹爪以及所述第二夹爪旋转至抓持准备状态或折叠收纳状态。
6.根据权利要求4所述的井盖迁移装置,其特征在于,所述夹爪安装块设置有直线轴承;所述直线运动模块包括:基座、导向轴、夹爪直线驱动电机、丝杆、直线导轨、第一连杆以及第二连杆;
所述丝杆以及所述直线导轨相互平行安装于所述基座;所述丝杆的一端设置有丝杆滑块,另一端设置有第一锥齿;所述丝杆滑块的底部与所述直线导轨滑动连接,所述丝杆滑块的顶部分别与所述第一连杆以及所述第二连杆的一端相连;所述第一连杆的另一端与所述第一旋转运动模块的夹爪安装块铰接,所述第二连杆的另一端与所述第二旋转运动模块的夹爪安装块铰接;所述导向轴相互平行固定于所述基座,且所述直线轴承套装于所述导向轴;所述夹爪直线驱动电机固定于所述基座,且所述夹爪直线驱动电机的驱动端设置有第二锥齿,所述第二锥齿与所述第一锥齿传动连接;
所述夹爪直线驱动电机用于,驱动所述丝杆滑块在所述直线导轨上滑动,并带动第一旋转运动模块的夹爪安装块以及所述第二旋转运动模块的夹爪安装块沿所述导向轴相互靠近或相互远离,以使所述第一夹爪以及所述第二夹爪相互靠近或相互远离。
7.根据权利要求6所述的井盖迁移装置,其特征在于,还包括:夹爪平移按钮;所述夹爪平移按钮,与所述夹爪直线驱动电机相连,用于控制所述夹爪直线驱动电机以使所述第一夹爪以及所述第二夹爪相互靠近或相互远离。
8.根据权利要求1所述的井盖迁移装置,其特征在于,所述移动底盘还包括连接板;
所述连接板上设置有多个与所述直线导轨相配合的直线导向件,所述直线导向件用于限定所述直线导轨沿所述直线导向件向上或向下运动。
9.根据权利要求1所述的井盖迁移装置,其特征在于,所述卷扬动力组件包括卷扬电机以及所述卷扬电机驱动的卷盘;所述井盖迁移装置还包括:第一导线滑轮组以及第二导线滑轮组;
所述第一导线滑轮组以及所述第二导线滑轮组分别固定安装于所述卷盘内的两侧,且所述动力绳索绕经所述第一导线滑轮组、所述第二导线滑轮组以及所述卷盘;
所述第一导线滑轮组以及所述第二导线滑轮组用于约束进入所述卷盘的所述动力绳索,以使所述卷盘对所述动力绳索进行卷收或卷放。
10.根据权利要求9所述的井盖迁移装置,其特征在于,还包括电机正转按钮以及电机反转按钮;
所述电机正转按钮以及所述电机反转按钮分别与所述卷扬电机相连;所述电机正转按钮用于控制所述卷扬电机正转,以使所述卷盘对所述动力绳索进行卷收;
所述电机反转按钮用于控制所述卷扬电机反转,以使所述卷盘对所述动力绳索进行卷放。
11.根据权利要求9所述的井盖迁移装置,其特征在于,还包括:设置于所述移动底盘的连接板上的第一限定滑轮组、第二限定滑轮组、第一转向滑轮组以及第二转向滑轮组;
所述第一限定滑轮组以及所述第二限定滑轮组,分别安装于所述卷盘的两侧,用于限定从所述卷盘两侧进入所述卷盘的所述动力绳索;
所述第一转向滑轮组以及第二转向滑轮组分别安装于所述卷盘两侧,用于引导所述动力绳索转向以使所述动力绳索绕经所述动力滑轮。
12.根据权利要求1所述的井盖迁移装置,其特征在于,还包括:控制把手;
所述控制把手包括握把以及多个拉杆组合,每个所述拉杆组合之间通过横杆连接,每个所述拉杆组合包括互相嵌套的多个拉杆套件;所述拉杆组合的一端与所述移动底盘铰接,另一端设置有所述握把;
所述握把,用于接收外部的力以使所述移动底盘带动所述井盖迁移装置移动,且对所述拉杆套件进行拉伸或折叠。
13.根据权利要求12所述的井盖迁移装置,其特征在于,所述拉杆组合中的最上层拉杆套件与所述移动底盘的连接板之间设置有气弹簧;
所述气弹簧的一端与所述最上层拉杆套件铰接,另一端与所述移动底盘的连接板铰接。
14.根据权利要求12所述的井盖迁移装置,其特征在于,所述最上层拉杆套件设置有第一锁扣,所述移动底盘的连接板上设置有第二锁扣;
所述第一锁扣与所述第二锁扣相对应,用于当所述最上层拉杆套件靠近所述移动底盘的连接板达到预设距离时,所述第一锁扣与所述第二锁扣相互紧扣。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202221415591.5U CN217947613U (zh) | 2022-06-08 | 2022-06-08 | 一种井盖迁移装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202221415591.5U CN217947613U (zh) | 2022-06-08 | 2022-06-08 | 一种井盖迁移装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN217947613U true CN217947613U (zh) | 2022-12-02 |
Family
ID=84217165
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202221415591.5U Active CN217947613U (zh) | 2022-06-08 | 2022-06-08 | 一种井盖迁移装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN217947613U (zh) |
-
2022
- 2022-06-08 CN CN202221415591.5U patent/CN217947613U/zh active Active
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10406675B2 (en) | Live working robot | |
| CN205527564U (zh) | 一种装饰瓷砖码垛搬运小车 | |
| CN112173987A (zh) | 一种地下管廊施工预制拼装装配设备 | |
| CN112692860A (zh) | 水下抓取装置 | |
| CN114906780A (zh) | 一种井盖迁移装置 | |
| CN217947613U (zh) | 一种井盖迁移装置 | |
| CN112502144B (zh) | 一种探测装置及其探测方法 | |
| CN210825066U (zh) | 夹取装置及吊装系统 | |
| CN111704025A (zh) | 一种建筑装饰材料吊运装置 | |
| CN216512711U (zh) | 一种可协助作业人员上下塔的自动升降装置的绞索装置 | |
| CN217437707U (zh) | 基于大型机电管线纵移及提升安装施工装置 | |
| CN216512740U (zh) | 一种井盖安装装置 | |
| CN213679418U (zh) | 一种智能抓取提升装置 | |
| JP2899146B2 (ja) | 成形パネルの仕分装置 | |
| JP4808015B2 (ja) | 電動揚重装置 | |
| CN113682938A (zh) | 一种可实现横向调节的建筑水泥砌块装卸装置 | |
| CN112809647A (zh) | 一种搬运机器人 | |
| CN111874051A (zh) | 一种应用于层叠式建筑材料的分板机 | |
| CN212609333U (zh) | 一种砌墙辅助装置 | |
| CN214733964U (zh) | 多功能吊装机 | |
| CN215101528U (zh) | 一种干式变压器的吊运装置 | |
| CN214383686U (zh) | 一种建筑工程用高空作业车 | |
| CN213999486U (zh) | 一种便于拆卸的桁架机器人 | |
| CN212799105U (zh) | 一种电缆盘安装驱动装置 | |
| CN219339531U (zh) | 一种搬运装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |