CN215432871U - 一种工业机器人辊类部件磨合装置 - Google Patents
一种工业机器人辊类部件磨合装置 Download PDFInfo
- Publication number
- CN215432871U CN215432871U CN202122057891.2U CN202122057891U CN215432871U CN 215432871 U CN215432871 U CN 215432871U CN 202122057891 U CN202122057891 U CN 202122057891U CN 215432871 U CN215432871 U CN 215432871U
- Authority
- CN
- China
- Prior art keywords
- controller
- fixed
- established
- industrial robot
- component
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Landscapes
- Finish Polishing, Edge Sharpening, And Grinding By Specific Grinding Devices (AREA)
Abstract
本实用新型涉及机器人零部件加工技术领域,具体涉及一种工业机器人辊类部件磨合装置,包括底座和加工台,还包括控制器、固定机构和打磨机构,固定机构设在加工台的顶部,固定机构包括盛放台和下压组件,打磨机构包括打磨棒、伸缩组件、升降组件和角度调节组件,伸缩组件设在底座的顶部,升降组件设在伸缩组件的顶部,角度调节组件设在升降组件上,打磨棒设在角度调节组件上,下压组件、伸缩组件、升降组件和角度调节组件与控制器均为电性连接,本实用新型的一种工业机器人辊类部件磨合装置,能够任意调节打磨棒的朝向,从而灵活调节打磨角度,对辊类部件进行多角度的打磨,同时能对不同大小和材质的辊类部件进行打磨。
Description
技术领域
本实用新型涉及机器人零部件加工技术领域,具体涉及一种工业机器人辊类部件磨合装置。
背景技术
机器人生产过程中,需要对其各个零部件分别加工,然后组成产品,在机器人各个零部件中,辊类部件的打磨工艺尤为关键,尤其是辊类部件的两端,在作为与其他零部件组装时的第一道接触端,打磨显得尤为重要。
现有机器人辊类打磨装置存在以下不足:
1.打磨棒通常无法进行任意角度的调节,在对辊类部件进行打磨时,需要频繁调节辊类部件的位置来满足打磨棒,降低了加工效率。
2.打磨棒在进行升降调节时,没有设计测量结构,无法精确控制其升降距离,从而不利于提升打磨精度,因而无法适应不同材质的辊类部件的打磨要求。
实用新型内容
本实用新型的目的在于提供一种工业机器人辊类部件磨合装置。
为达此目的,本实用新型采用以下技术方案:
提供一种工业机器人辊类部件磨合装置,包括底座和加工台,还包括控制器、固定机构和打磨机构,固定机构设在加工台的顶部,固定机构包括盛放台和下压组件,打磨机构包括打磨棒、伸缩组件、升降组件和角度调节组件,伸缩组件设在底座的顶部,升降组件设在伸缩组件的顶部,角度调节组件设在升降组件上,打磨棒设在角度调节组件上,下压组件、伸缩组件、升降组件和角度调节组件与控制器均为电性连接。
优选的,伸缩组件包括长轴气缸和滑板,底座和加工台的顶部均固定设有支撑板,两个支撑板之间呈对称设置有两个滑轨,滑板滑动设置在两个滑轨的顶部,长轴气缸插设在其中一个支撑板的顶部,其输出端与滑板的底部固定连接,长轴气缸与控制器电连接。
优选的,升降组件包括丝杆、微电机和升降板,滑板的顶部呈对称设置有两个导轨和两个支撑杆,升降板滑动设置在两个导轨之间,两个导轨和两个支撑杆的顶部之间固定设有顶板,丝杆可转动的设置在顶板和滑板之间,微电机固定设在顶板的顶部,其输出端与丝杆的顶部固定连接,且升降板的一端固定设有升降块,升降块与丝杆螺纹连接,微电机与控制器电连接。
优选的,角度调节组件包括伺服电机、转盘和连杆,伺服电机固定设在升降板的一端外壁上,其输出端穿过升降板,转盘套设在其输出端上,连杆铰接设置在转盘的外壁上,伺服电机与控制器电连接。
优选的,升降板远离伺服电机的一端外壁上可转动的设置有安装套,安装套的内部插设有驱动电机,打磨棒与驱动电机的输出端套接,安装套靠近转盘的顶部一端与连杆远离转盘的一端铰接,驱动电机与控制器电连接。
优选的,升降块的外壁上固定设有指示条,滑板的顶部呈竖直设有立杆,立杆的中部设有刻度值,指示条朝向刻度值。
优选的,下压组件包括单轴气缸、推板和弧形压块,加工台的顶部固定设有立板,单轴气缸呈竖直设在立板的顶部,推板固定设在单轴气缸的输出端上,弧形压块固定设在推板的底部,单轴气缸与控制器电连接。
优选的,盛放台的顶部开设有V型开口,弧形压块位于V型开口的上方。
本实用新型的有益效果:
1.本实用新型通过设计升降组件,即丝杆、微电机和升降板,同时通过设计指示条和刻度值,刻度值为中间刻度为零,数值由中间向两端逐渐扩大,在对辊类部件进行打磨时,由于不同材质的辊类部件的打磨精度不同,因此,在每次打磨棒调节至与打磨棒贴合过程中,可及时观察指示条于刻度值上的指向数值,然后进行计算,即可完成打磨精度的精确调节,进而提升其磨合精度,满足不同材质的辊类部件的磨合要求。
2.本实用新型通过设计角度调节组件,即伺服电机、转盘和连杆,能够通过任意调节打磨棒的角度,从而对机器人辊类部件端部的每个位置进行打磨,无需辊类部件频繁调节夹持位置,加快了加工的整体进程,进而提升了本装置的磨合效率。
3.本实用新型通过设计固定机构,即盛放台和下压组件,同时通过将盛放台的顶部设计为V型结构,V型开口上宽下窄,因而可放置不同粗细的辊类部件,从而满足不同大小的机器人辊类部件的磨合加工,提升了本装置的实用性和灵活性。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面对本发明实施例中的附图作简单地介绍。
图1为本实用新型的立体结构示意图一;
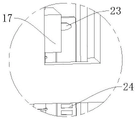
图2为图1中的A处放大图;
图3为本实用新型的立体结构示意图二;
图4为图3中的B处放大图;
图5为本实用新型打磨机构的立体结构示意图;
图6为图5中的C处放大图;
图中:加工台1,控制器2,固定机构3,打磨机构4,盛放台5,下压组件6,打磨棒7,伸缩组件8,升降组件9,角度调节组件10,长轴气缸11,滑板12,丝杆13,微电机14,升降板15,顶板16,升降块17,伺服电机18,转盘19,连杆20,安装套21,驱动电机22,指示条23,刻度值24,单轴气缸25,推板26,弧形压块27,V型开口28。
具体实施方式
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸。
参照图1至图6所示的一种工业机器人辊类部件磨合装置,包括底座和加工台1,还包括控制器2、固定机构3和打磨机构4,固定机构3设在加工台1的顶部,固定机构3包括盛放台5和下压组件6,打磨机构4包括打磨棒7、伸缩组件8、升降组件9和角度调节组件10,伸缩组件8设在底座的顶部,升降组件9设在伸缩组件8的顶部,角度调节组件10设在升降组件9上,打磨棒7设在角度调节组件10上,下压组件6、伸缩组件8、升降组件9和角度调节组件10与控制器2均为电性连接。
伸缩组件8包括长轴气缸11和滑板12,底座和加工台1的顶部均固定设有支撑板,两个支撑板之间呈对称设置有两个滑轨,滑板12滑动设置在两个滑轨的顶部,长轴气缸11插设在其中一个支撑板的顶部,其输出端与滑板12的底部固定连接,长轴气缸11与控制器2电连接,当辊类部件固定后,通过控制器2启动长轴气缸11,因而使其输出端向靠近加工台1的一端伸出,由于其输出端与滑板12固定连接,滑板12与两个滑轨滑动连接,打磨棒7设计在滑板12的顶部,从而带动打磨棒7向靠近辊类部件的上方一端伸出。
升降组件9包括丝杆13、微电机14和升降板15,滑板12的顶部呈对称设置有两个导轨和两个支撑杆,升降板15滑动设置在两个导轨之间,两个导轨和两个支撑杆的顶部之间固定设有顶板16,丝杆13可转动的设置在顶板16和滑板12之间,微电机14固定设在顶板16的顶部,其输出端与丝杆13的顶部固定连接,且升降板15的一端固定设有升降块17,升降块17与丝杆13螺纹连接,微电机14与控制器2电连接,当打磨棒7向靠近辊类部件的上方一端伸出后,通过控制器2启动微电机14,由于其输出端与丝杆13固定连接,顶板16和滑板12分别与丝杆13的两端转动连接,又因为升降块17与丝杆13螺纹连接,升降块17与升降板15固定连接,加之,升降板15与两个滑轨滑动连接,进而带动打磨棒7向靠近辊类部件的顶部一端靠近。
角度调节组件10包括伺服电机18、转盘19和连杆20,伺服电机18固定设在升降板15的一端外壁上,其输出端穿过升降板15,转盘19套设在其输出端上,连杆20铰接设置在转盘19的外壁上,伺服电机18与控制器2电连接,当辊类部件的端部一处位置打磨符合标准时,通过控制器2启动伺服电机18,由于其输出端与转盘19套接,安装套21与驱动电机22套接,安装套21靠近转盘19的顶部一端和转盘19的偏心位置分别与连杆20的两端铰接,进而带动打磨棒7旋转,对辊类部件端部的另一处位置进行打磨,以此类推,直至将辊类部件端部的上半部分全部打磨,然后通过控制器2松开弧形压块27,通过控制器2带动滑板12复位,使得打磨棒7远离加工台1,再通过控制器2带动升降板15及其上的打磨棒7继续向下滑动,直至打磨棒7滑动至与辊类部件端部的底部贴合,然后通过弧形压块27压紧辊类部件,再通过长轴气缸11带动打磨棒7靠近辊类部件进行打磨,接着,通过控制器2调节打磨棒7的角度,直至将辊类部件端部的下半部分全部打磨,至此,将辊类部件的一端全部打磨,然后通过人工将辊类部纵向旋转,将打磨好的一端与其另一端对调,并按照上述步骤,将其另一端全部进行打磨,进而完成辊类部件两端的打磨工作。
升降板15远离伺服电机18的一端外壁上可转动的设置有安装套21,安装套21的内部插设有驱动电机22,打磨棒7与驱动电机22的输出端套接,安装套21靠近转盘19的顶部一端与连杆20远离转盘19的一端铰接,驱动电机22与控制器2电连接,当打磨棒7下降至与辊类部件的端部贴合时,通过控制启动驱动电机22,从而带动其输出端旋转,由于打磨棒7与其输出端固定连接,从而带动打磨棒7旋转,对辊类部件的端部进行打磨。
升降块17的外壁上固定设有指示条23,滑板12的顶部呈竖直设有立杆,立杆的中部设有刻度值24,指示条23朝向刻度值24,刻度值24为中间刻度为零,数值由中间向两端逐渐扩大,在对辊类部件进行打磨时,由于不同材质的辊类部件的打磨精度不同,因此,在每次打磨棒7调节至与打磨棒7贴合过程中,可及时观察指示条23于刻度值24上的指向数值,然后进行计算,即可完成打磨精度的精确调节,进而提升其磨合精度。
下压组件6包括单轴气缸25、推板26和弧形压块27,加工台1的顶部固定设有立板,单轴气缸25呈竖直设在立板的顶部,推板26固定设在单轴气缸25的输出端上,弧形压块27固定设在推板26的底部,单轴气缸25与控制器2电连接,当进行机器人辊类部件的磨合要求,首先通过人工将辊类部件水平放到盛放台5顶部的V型开口28内,然后通过控制器2启动单轴气缸25,从而使其输出端向下伸出,由于其输出端与推板26固定连接,推板26与弧形压块27固定连接,从而带动压块下降,对辊类部件进行压紧,实现其固定。
盛放台5的顶部开设有V型开口28,弧形压块27位于V型开口28的上方,V型开口28上宽下窄,因而可放置不同粗细的辊类部件,从而满足不同大小的机器人辊类部件的磨合加工,提升了本装置的实用性。
本实用新型的工作原理:当进行机器人辊类部件的磨合要求,首先通过人工将辊类部件水平放到盛放台5顶部的V型开口28内,然后通过控制器2启动单轴气缸25,从而使其输出端向下伸出,由于其输出端与推板26固定连接,推板26与弧形压块27固定连接,从而带动压块下降,对辊类部件进行压紧,实现其固定。
V型开口28上宽下窄,因而可放置不同粗细的辊类部件,从而满足不同大小的机器人辊类部件的磨合加工,提升了本装置的实用性。
当辊类部件固定后,通过控制器2启动长轴气缸11,因而使其输出端向靠近加工台1的一端伸出,由于其输出端与滑板12固定连接,滑板12与两个滑轨滑动连接,打磨棒7设计在滑板12的顶部,从而带动打磨棒7向靠近辊类部件的上方一端伸出。
当打磨棒7向靠近辊类部件的上方一端伸出后,通过控制器2启动微电机14,由于其输出端与丝杆13固定连接,顶板16和滑板12分别与丝杆13的两端转动连接,又因为升降块17与丝杆13螺纹连接,升降块17与升降板15固定连接,加之,升降板15与两个滑轨滑动连接,进而带动打磨棒7向靠近辊类部件的顶部一端靠近。
当打磨棒7下降至与辊类部件的端部贴合时,通过控制启动驱动电机22,从而带动其输出端旋转,由于打磨棒7与其输出端固定连接,从而带动打磨棒7旋转,对辊类部件的端部进行打磨。
当辊类部件的端部一处位置打磨符合标准时,通过控制器2启动伺服电机18,由于其输出端与转盘19套接,安装套21与驱动电机22套接,安装套21靠近转盘19的顶部一端和转盘19的偏心位置分别与连杆20的两端铰接,进而带动打磨棒7旋转,对辊类部件端部的另一处位置进行打磨,以此类推,直至将辊类部件端部的上半部分全部打磨,然后通过控制器2松开弧形压块27,通过控制器2带动滑板12复位,使得打磨棒7远离加工台1,再通过控制器2带动升降板15及其上的打磨棒7继续向下滑动,直至打磨棒7滑动至与辊类部件端部的底部贴合,然后通过弧形压块27压紧辊类部件,再通过长轴气缸11带动打磨棒7靠近辊类部件进行打磨,接着,通过控制器2调节打磨棒7的角度,直至将辊类部件端部的下半部分全部打磨,至此,将辊类部件的一端全部打磨,然后通过人工将辊类部纵向旋转,将打磨好的一端与其另一端对调,并按照上述步骤,将其另一端全部进行打磨,进而完成辊类部件两端的打磨工作。
刻度值24为中间刻度为零,数值由中间向两端逐渐扩大,在对辊类部件进行打磨时,由于不同材质的辊类部件的打磨精度不同,因此,在每次打磨棒7调节至与打磨棒7贴合过程中,可及时观察指示条23于刻度值24上的指向数值,然后进行计算,即可完成打磨精度的精确调节,进而提升其磨合精度。
Claims (8)
1.一种工业机器人辊类部件磨合装置,包括底座和加工台(1),其特征在于:还包括控制器(2)、固定机构(3)和打磨机构(4),固定机构(3)设在加工台(1)的顶部,固定机构(3)包括盛放台(5)和下压组件(6),打磨机构(4)包括打磨棒(7)、伸缩组件(8)、升降组件(9)和角度调节组件(10),伸缩组件(8)设在底座的顶部,升降组件(9)设在伸缩组件(8)的顶部,角度调节组件(10)设在升降组件(9)上,打磨棒(7)设在角度调节组件(10)上,下压组件(6)、伸缩组件(8)、升降组件(9)和角度调节组件(10)与控制器(2)均为电性连接。
2.根据权利要求1所述的一种工业机器人辊类部件磨合装置,其特征在于:伸缩组件(8)包括长轴气缸(11)和滑板(12),底座和加工台(1)的顶部均固定设有支撑板,两个支撑板之间呈对称设置有两个滑轨,滑板(12)滑动设置在两个滑轨的顶部,长轴气缸(11)插设在其中一个支撑板的顶部,其输出端与滑板(12)的底部固定连接,长轴气缸(11)与控制器(2)电连接。
3.根据权利要求2所述的一种工业机器人辊类部件磨合装置,其特征在于:升降组件(9)包括丝杆(13)、微电机(14)和升降板(15),滑板(12)的顶部呈对称设置有两个导轨和两个支撑杆,升降板(15)滑动设置在两个导轨之间,两个导轨和两个支撑杆的顶部之间固定设有顶板(16),丝杆(13)可转动的设置在顶板(16)和滑板(12)之间,微电机(14)固定设在顶板(16)的顶部,其输出端与丝杆(13)的顶部固定连接,且升降板(15)的一端固定设有升降块(17),升降块(17)与丝杆(13)螺纹连接,微电机(14)与控制器(2)电连接。
4.根据权利要求3所述的一种工业机器人辊类部件磨合装置,其特征在于:角度调节组件(10)包括伺服电机(18)、转盘(19)和连杆(20),伺服电机(18)固定设在升降板(15)的一端外壁上,其输出端穿过升降板(15),转盘(19)套设在其输出端上,连杆(20)铰接设置在转盘(19)的外壁上,伺服电机(18)与控制器(2)电连接。
5.根据权利要求4所述的一种工业机器人辊类部件磨合装置,其特征在于:升降板(15)远离伺服电机(18)的一端外壁上可转动的设置有安装套(21),安装套(21)的内部插设有驱动电机(22),打磨棒(7)与驱动电机(22)的输出端套接,安装套(21)靠近转盘(19)的顶部一端与连杆(20)远离转盘(19)的一端铰接,驱动电机(22)与控制器(2)电连接。
6.根据权利要求5所述的一种工业机器人辊类部件磨合装置,其特征在于:升降块(17)的外壁上固定设有指示条(23),滑板(12)的顶部呈竖直设有立杆,立杆的中部设有刻度值(24),指示条(23)朝向刻度值(24)。
7.根据权利要求6所述的一种工业机器人辊类部件磨合装置,其特征在于:下压组件(6)包括单轴气缸(25)、推板(26)和弧形压块(27),加工台(1)的顶部固定设有立板,单轴气缸(25)呈竖直设在立板的顶部,推板(26)固定设在单轴气缸(25)的输出端上,弧形压块(27)固定设在推板(26)的底部,单轴气缸(25)与控制器(2)电连接。
8.根据权利要求7所述的一种工业机器人辊类部件磨合装置,其特征在于:盛放台(5)的顶部开设有V型开口(28),弧形压块(27)位于V型开口(28)的上方。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202122057891.2U CN215432871U (zh) | 2021-08-27 | 2021-08-27 | 一种工业机器人辊类部件磨合装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202122057891.2U CN215432871U (zh) | 2021-08-27 | 2021-08-27 | 一种工业机器人辊类部件磨合装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN215432871U true CN215432871U (zh) | 2022-01-07 |
Family
ID=79697107
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202122057891.2U Active CN215432871U (zh) | 2021-08-27 | 2021-08-27 | 一种工业机器人辊类部件磨合装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN215432871U (zh) |
-
2021
- 2021-08-27 CN CN202122057891.2U patent/CN215432871U/zh active Active
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106425790B (zh) | 一种压铸件多机器人协同打磨装置及方法 | |
| CN111152202B (zh) | 一种联合机器人手臂运转生产设备 | |
| CN208146752U (zh) | 一种贵金属冲压机 | |
| CN215432871U (zh) | 一种工业机器人辊类部件磨合装置 | |
| CN212043904U (zh) | 一种用于法兰修边的装置 | |
| CN209850682U (zh) | 一种多角度打磨装置 | |
| CN211332812U (zh) | 一种三维调整角度且夹力可调的台钳 | |
| CN210704116U (zh) | 一种水磨拉丝设备 | |
| CN210059870U (zh) | 一种用于对转子轴两端钻孔的钻孔装置 | |
| CN109693159B (zh) | 柱塞球头自动磨机 | |
| CN217344094U (zh) | 一种机械加工焊接设备 | |
| CN216657371U (zh) | 一种五金餐具生产用高效打磨抛光装置 | |
| CN215748745U (zh) | 一种自动翻转定位工装 | |
| CN112139911B (zh) | 一种弧形天线振子加工用限位装置及其使用方法 | |
| CN214351448U (zh) | 一种高性能金属加工设备 | |
| CN212471414U (zh) | 一种工程机械维修用升降装置 | |
| CN211727742U (zh) | 一种可调节高度的电气设备用切割装置 | |
| CN210099555U (zh) | 一种基于plc的车床自动控制系统 | |
| CN209408318U (zh) | 一种机械零件的夹紧装置 | |
| CN208713040U (zh) | 一种斜嘴钳钳口倒角设备 | |
| CN218904602U (zh) | 一种管件打磨机 | |
| CN218947250U (zh) | 一种模头打磨打孔机 | |
| CN215431283U (zh) | 一种通用型机器人零部件冲压及精量设备 | |
| CN219665780U (zh) | 用于台钻的物件夹持工装 | |
| CN215470265U (zh) | 一种多角度打磨装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |