CN215145947U - 一种焊接机器人用夹持装置 - Google Patents
一种焊接机器人用夹持装置 Download PDFInfo
- Publication number
- CN215145947U CN215145947U CN202120714771.2U CN202120714771U CN215145947U CN 215145947 U CN215145947 U CN 215145947U CN 202120714771 U CN202120714771 U CN 202120714771U CN 215145947 U CN215145947 U CN 215145947U
- Authority
- CN
- China
- Prior art keywords
- fixed
- plate
- threaded rod
- rod
- clamping device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
Landscapes
- Butt Welding And Welding Of Specific Article (AREA)
Abstract
本实用新型公开一种焊接机器人用夹持装置,属于机器人夹持技术领域。所述工作台顶端固定有两根液压缸和支撑板,所述液压缸活塞杆固定有移动板,其顶端通过底板固定有驱动电机并开有通孔,底端固定有第一直板和第二直板,所述驱动电机输出端连接有第一传动轮,所述第一直板内侧通过连接杆连接有第二传动轮,所述第二传动轮固定有第一螺纹杆并与所述第一传动轮通过传送带连接,所述第一螺纹杆通过连接块固定连接有第二螺纹杆并均连接有移动杆,所述移动杆底端固定有夹块;使用该装置,通过所述驱动电机带动所述第一传动轮与所述第二传动轮转动,来对两个所述夹块间距进行调节,调节起来十分方便,能够夹紧不同尺寸的零件,设计合理,便于推广。
Description
技术领域
本实用新型涉及机器人夹持技术领域,特别涉及一种焊接机器人用夹持装置。
背景技术
现有机器人在组装时用的夹持装置,只能对固定大小的零件进行夹取,当零件尺寸过长时只能通过更换不同大小的夹持装置来满足夹持要求,这样就十分麻烦,因此亟需设计一种夹持装置容易调节的机器人组装用夹持装置来解决上述问题。
实用新型内容
本实用新型的目的在于提供一种焊接机器人用夹持装置,以解决现有机器人组装用夹持装置调节起来较为不便的问题。
为解决上述技术问题,本实用新型提供了一种焊接机器人用夹持装置,包括工作台,所述工作台顶端固定有两根液压缸和支撑板,所述液压缸活塞杆固定有移动板,所述移动板顶端通过底板固定有水平设置的驱动电机并开有通孔,底端固定有第一直板和第二直板,所述驱动电机输出端连接有第一传动轮,所述第一直板内侧通过连接杆活动连接有第二传动轮,所述第二传动轮上固定有第一螺纹杆并与所述第一传动轮通过传送带连接,所述传送带穿过所述通孔,所述第一螺纹杆通过连接块固定连接有第二螺纹杆,所述第一螺纹杆与所述第二螺纹杆位置相对并均螺纹连接有移动杆,所述移动杆底端固定有夹块;
所述第二直板内侧固定有轴承,所述轴承与所述第二螺纹杆另一端连接。
可选的,所述夹块内侧均开有弧槽,所述弧槽中固定有弹性垫。
可选的,所述移动板底端开有滑槽,所述移动杆顶端固定有位于所述滑槽的滑块。
在本实用新型提供的一种焊接机器人用夹持装置中,所述工作台顶端固定有两根液压缸和支撑板,所述液压缸活塞杆固定有移动板,其顶端通过底板固定有驱动电机并开有通孔,底端固定有第一直板和第二直板,所述驱动电机输出端连接有第一传动轮,所述第一直板内侧通过连接杆连接有第二传动轮,所述第二传动轮固定有第一螺纹杆并与所述第一传动轮通过传送带连接,所述第一螺纹杆通过连接块固定连接有第二螺纹杆并均连接有移动杆,所述移动杆底端固定有夹块;使用该装置,通过所述驱动电机带动所述第一传动轮与所述第二传动轮转动,来对两个所述夹块间距进行调节,调节起来十分方便,能够夹紧不同尺寸的零件,设计合理,便于推广。
附图说明
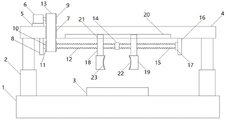
图1是本实用新型提供的焊接机器人用夹持装置结构示意图。
具体实施方式
以下结合附图和具体实施例对本实用新型提出的一种焊接机器人用夹持装置作进一步详细说明。根据下面说明和权利要求书,本实用新型的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本实用新型实施例的目的。
实施例一
本实用新型提供了一种焊接机器人用夹持装置,其结构如图1所示,包括工作台1,所述工作台1顶端固定有两根液压缸2和支撑板3,所述液压缸2活塞杆固定有移动板4,所述移动板4顶端通过底板5固定有水平设置的驱动电机6并开有通孔7,底端固定有第一直板8和第二直板16,所述驱动电机6输出端连接有第一传动轮9,所述第一直板8内侧通过连接杆10活动连接有第二传动轮11,所述第二传动轮11上固定有第一螺纹杆12并与所述第一传动轮9通过传送带13连接,所述传送带13穿过所述通孔7,所述第一螺纹杆12通过连接块14固定连接有第二螺纹杆15,所述第一螺纹杆12与所述第二螺纹杆15位置相对并均螺纹连接有移动杆18,所述移动杆18底端固定有夹块19;所述第二直板16内侧固定有轴承17,所述轴承17与所述第二螺纹杆15另一端连接,通过所述驱动电机6带动所述第一传动轮9与所述第二传动轮11转动,使得所述第一螺纹杆12与所述第二螺纹杆15转动带动两个所述夹块19同时向内或向外移动来对零件进行夹紧。使用所述焊接机器人用夹持装置,调节起来十分方便,能够夹紧不同尺寸的零件,设计合理,便于推广。
所述夹块19内侧均开有弧槽23,所述弧槽23中固定有弹性垫22,用于保护零件避免夹持力度过大造成其损坏;所述移动板4底端开有滑槽20,所述移动杆18顶端固定有位于所述滑槽20的滑块21,保证了所述移动杆18始终水平移动不会发生倾斜。
使用时,首先将零件放置在所述支撑板3上,然后启动两个液压缸2,其活塞杆带动所述移动板4和两个所述夹块19向下移动,使得两个所述夹块19位于该零件两侧,接着启动所述驱动电机8,其输出端带动所述第一传动轮9转动,所述第二传动轮11带动所述第一螺纹杆12与所述第二螺纹杆15转动,这时两个所述夹块19向内移动对该零件进行夹持,夹持效果较好,并且调节起来十分方便,能够夹紧不同尺寸的零件,满足了企业的组装要求。
上述描述仅是对本实用新型较佳实施例的描述,并非对本实用新型范围的任何限定,本实用新型领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
Claims (3)
1.一种焊接机器人用夹持装置,包括工作台(1),其特征在于,所述工作台(1)顶端固定有两根液压缸(2)和支撑板(3),所述液压缸(2)活塞杆固定有移动板(4),所述移动板(4)顶端通过底板(5)固定有水平设置的驱动电机(6)并开有通孔(7),底端固定有第一直板(8)和第二直板(16),所述驱动电机(6)输出端连接有第一传动轮(9),所述第一直板(8)内侧通过连接杆(10)活动连接有第二传动轮(11),所述第二传动轮(11)上固定有第一螺纹杆(12)并与所述第一传动轮(9)通过传送带(13)连接,所述传送带(13)穿过所述通孔(7),所述第一螺纹杆(12)通过连接块(14)固定连接有第二螺纹杆(15),所述第一螺纹杆(12)与所述第二螺纹杆(15)位置相对并均螺纹连接有移动杆(18),所述移动杆(18)底端固定有夹块(19);
所述第二直板(16)内侧固定有轴承(17),所述轴承(17)与所述第二螺纹杆(15)另一端连接。
2.如权利要求1所述的焊接机器人用夹持装置,其特征在于,所述夹块(19)内侧均开有弧槽(23),所述弧槽(23)中固定有弹性垫(22)。
3.如权利要求1所述的焊接机器人用夹持装置,其特征在于,所述移动板(4)底端开有滑槽(20),所述移动杆(18)顶端固定有位于所述滑槽(20)的滑块(21)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202120714771.2U CN215145947U (zh) | 2021-04-08 | 2021-04-08 | 一种焊接机器人用夹持装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202120714771.2U CN215145947U (zh) | 2021-04-08 | 2021-04-08 | 一种焊接机器人用夹持装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN215145947U true CN215145947U (zh) | 2021-12-14 |
Family
ID=79359460
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202120714771.2U Active CN215145947U (zh) | 2021-04-08 | 2021-04-08 | 一种焊接机器人用夹持装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN215145947U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115179209A (zh) * | 2022-05-05 | 2022-10-14 | 无锡市旭恒精密机械有限公司 | 一种液压杆加工用固定装置 |
-
2021
- 2021-04-08 CN CN202120714771.2U patent/CN215145947U/zh active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115179209A (zh) * | 2022-05-05 | 2022-10-14 | 无锡市旭恒精密机械有限公司 | 一种液压杆加工用固定装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN210387665U (zh) | 一种汽车非标件加工用钻孔装置 | |
| CN215145947U (zh) | 一种焊接机器人用夹持装置 | |
| CN217290890U (zh) | 一种汽车用电池激光焊接装置 | |
| CN214024352U (zh) | 一种钢材无缝焊接装置 | |
| CN210549089U (zh) | 一种用于万向联轴器加工用焊接设备 | |
| CN216503314U (zh) | 一种防护效果好的电池充电器组装装置 | |
| CN207930224U (zh) | 一种动力电池定位夹具 | |
| CN215091633U (zh) | 一种固定效果良好的焊接夹具 | |
| CN212217479U (zh) | 转移装置及焊接设备 | |
| CN204846533U (zh) | 模具快速装卸装置 | |
| CN220029195U (zh) | 一种可调式定位切换机构 | |
| CN203092175U (zh) | 一种带平行四边形连杆的油缸夹紧机构 | |
| CN215146192U (zh) | 一种焊接夹具 | |
| CN215091511U (zh) | 一种可调节式焊接夹具 | |
| CN111185698A (zh) | 一种油口焊接机器人 | |
| CN220679662U (zh) | 一种搅拌摩擦焊夹持装置 | |
| CN218638934U (zh) | 一种v型槽平行夹持装置 | |
| CN215090336U (zh) | 一种热管加工用压扁装置 | |
| CN217665919U (zh) | 一种冲床用工件夹持机构 | |
| CN214518956U (zh) | 一种轴承加工定位装置 | |
| CN215146191U (zh) | 一种便于调节的焊接夹具 | |
| CN209850735U (zh) | 一种无动力自动定位夹紧装置 | |
| CN220540048U (zh) | 一种ar-hud的组装机构 | |
| CN218098226U (zh) | 一种电池箱生产检测用振动装置 | |
| CN220244747U (zh) | 一种动力电池模组夹持搬运工装 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |