CN210943934U - 一种机器人码垛装箱装置 - Google Patents
一种机器人码垛装箱装置 Download PDFInfo
- Publication number
- CN210943934U CN210943934U CN201921604471.8U CN201921604471U CN210943934U CN 210943934 U CN210943934 U CN 210943934U CN 201921604471 U CN201921604471 U CN 201921604471U CN 210943934 U CN210943934 U CN 210943934U
- Authority
- CN
- China
- Prior art keywords
- pile
- neatly
- sides
- movable
- fixedly connected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Abstract
本实用新型公开了一种机器人码垛装箱装置,包括底座、码垛箱和传送架,所述底座位于码垛箱的正面,并且传送架位于底座的正面,本实用新型涉及码垛装置技术领域。该机器人码垛装箱装置,通过码垛箱的内部开设有第一活动槽,并且第一活动槽的内壁滑动连接有支撑板,码垛箱背面的两侧均活动连接有活动板,并且两个活动板的一侧均与码垛箱的内部活动连接,支撑板的两侧均固定连接有活动块,码垛箱内部的两侧均开设有与活动块相适配的第一安装槽,利用码垛箱对码垛过程中的集装箱进行限位,可以使集装箱在码垛过程中稳定性较好,另一方面可以减小集装箱码垛起来后的轴向偏差,使用效果较好,有效地防止码垛上层集装箱滑落下来。
Description
技术领域
本实用新型涉及码垛装置技术领域,具体为一种机器人码垛装箱装置。
背景技术
码垛装置是将已装入容器的纸箱,按一定排列码放在托盘、栈板上,进行自动堆码,可堆码多层,然后推出,便于叉车运至仓库储存,采用PLC+触摸屏控制,实现智能化操作管理,简便、易掌握,可大大地减少劳动力和降低劳动强度,码垛装置是输送机输送来的料袋、纸箱或是其它包装材料按照客户工艺要求的工作方式自动堆叠成垛,并将成垛的物料进行输送的设备,集装箱码垛装置是将集装箱进行码垛的装置。
目前市场上所使用的机器人码垛装箱装置对于集装箱在进行码垛过程中,存在一些缺陷,集装箱在码垛过程中的稳定性较差,以及码垛起来的集装箱存在轴向偏差,这样就可能会造成码垛在叉车上进行运输的时候,码垛上层的集装箱容易滑落下来,对集装箱内部的货物造成损坏,码垛装置使用效果较差。
发明内容
针对现有技术的不足,本实用新型提供了一种机器人码垛装箱装置,解决了集装箱在码垛过程中的稳定性较差,以及码垛起来的集装箱存在轴向偏差,这样就可能会造成码垛在叉车上进行运输的时候,码垛上层的集装箱容易滑落下来,对集装箱内部的货物造成损坏,码垛装置使用效果较差的问题。
为实现以上目的,本实用新型通过以下技术方案予以实现:一种机器人码垛装箱装置,包括底座、码垛箱和传送架,所述底座位于码垛箱的正面,并且传送架位于底座的正面,所述底座的顶部转动连接有旋转台,所述旋转台的顶部固定连接有机械臂,并且机械臂的一端通过安装件固定连接有抓手,所述码垛箱的内部开设有第一活动槽,并且第一活动槽的内壁滑动连接有支撑板,所述码垛箱背面的两侧均活动连接有活动板,并且两个活动板的一侧均与码垛箱的内部活动连接,所述支撑板的两侧均固定连接有活动块,所述码垛箱内部的两侧均开设有与活动块相适配的第一安装槽,并且活动块的正面与背面分别与第一安装槽内壁的正面与背面滑动连接,所述第一安装槽内壁的底部设置有第一伺服电缸,并且第一伺服电缸输出轴的顶端与活动块的底部固定连接。
优选的,所述码垛箱背面的两侧均开设有与活动板相适配的第二安装槽,并且两个第二安装槽内壁的一侧均设置有第二伺服电缸,所述活动板的表面与第二安装槽的内壁滑动连接。
优选的,所述活动板的内部开设有与第二伺服电缸相适配的第二活动槽,并且第二伺服电缸输出轴的一端与第二活动槽内壁的一侧固定连接。
优选的,所述支撑板顶部的两侧均开设有凹槽,并且支撑板的顶部设置有防滑垫。
优选的,所述传送架的顶部活动连接有传送带,并且传送架两侧的正面与背面均固定连接有支撑座。
优选的,所述传送架正面的两侧分别设置有转轮与驱动电机,所述驱动电机输出轴的表面固定连接有传动轮,并且传动轮与转轮的表面之间通过皮带传动连接。
有益效果
本实用新型提供了一种机器人码垛装箱装置。与现有技术相比具备以下有益效果:
(1)、该机器人码垛装箱装置,通过码垛箱的内部开设有第一活动槽,并且第一活动槽的内壁滑动连接有支撑板,码垛箱背面的两侧均活动连接有活动板,并且两个活动板的一侧均与码垛箱的内部活动连接,支撑板的两侧均固定连接有活动块,码垛箱内部的两侧均开设有与活动块相适配的第一安装槽,并且活动块的正面与背面分别与第一安装槽内壁的正面与背面滑动连接,第一安装槽内壁的底部设置有第一伺服电缸,并且第一伺服电缸输出轴的顶端与活动块的底部固定连接,利用码垛箱对码垛过程中的集装箱进行限位,一方面可以使集装箱在码垛过程中稳定性较好,另一方面可以减小集装箱码垛起来后的轴向偏差,使用效果较好,有效地防止码垛上层集装箱滑落下来。
(2)、该机器人码垛装箱装置,通过码垛箱背面的两侧均开设有与活动板相适配的第二安装槽,并且两个第二安装槽内壁的一侧均设置有第二伺服电缸,活动板的表面与第二安装槽的内壁滑动连接,活动板的内部开设有与第二伺服电缸相适配的第二活动槽,并且第二伺服电缸输出轴的一端与第二活动槽内壁的一侧固定连接,码垛箱内部运用机械元件进行对活动板的控制,操作方便,并且使用效果较好。
附图说明
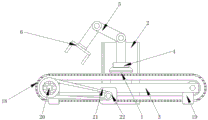
图1为本实用新型码垛装箱装置结构的主视图;
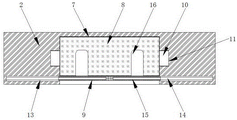
图2为本实用新型码垛箱内部结构的俯视图;
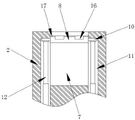
图3为本实用新型码垛箱内部结构的侧视图;
图4为本实用新型码垛箱结构的后视图。
图中:1-底座、2-码垛箱、3-传送架、4-旋转台、5-机械臂、6-抓手、7-第一活动槽、8-支撑板、9-活动板、10-活动块、11-第一安装槽、12-第一伺服电缸、13-第二安装槽、14-第二伺服电缸、15-第二活动槽、16-凹槽、17-防滑垫、18-传送带、19-支撑座、20-转轮、21-驱动电机、22-传动轮。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
请参阅图1-4,本实用新型提供一种技术方案:一种机器人码垛装箱装置,包括底座1、码垛箱2和传送架3,利用码垛箱对码垛过程中的集装箱进行限位,一方面可以使集装箱在码垛过程中稳定性较好,另一方面可以减小集装箱码垛起来后的轴向偏差,使用效果较好,有效地防止码垛上层集装箱滑落下来,传送架3的顶部活动连接有传送带18,并且传送架3两侧的正面与背面均固定连接有支撑座19,传送架3正面的两侧分别设置有转轮20与驱动电机21,码垛箱内部运用机械元件进行对活动板的控制,操作方便,并且使用效果较好,驱动电机21采用步进伺服电机,可以使传动带18稳定的在传送架3上进行传送,驱动电机21输出轴的表面固定连接有传动轮22,并且传动轮22与转轮20的表面之间通过皮带传动连接,码垛箱2背面的两侧均开设有与活动板9相适配的第二安装槽13,并且两个第二安装槽13内壁的一侧均设置有第二伺服电缸14,活动板9的表面与第二安装槽13的内壁滑动连接,底座1位于码垛箱2的正面,并且传送架3位于底座1的正面,底座1的顶部转动连接有旋转台4,旋转台4的顶部固定连接有机械臂5,并且机械臂5的一端通过安装件固定连接有抓手6,抓手6的表面设置有橡胶垫,可以有效地防止在进行集装箱搬运的时候发生滑动,码垛箱2的内部开设有第一活动槽7,并且第一活动槽7的内壁滑动连接有支撑板8,支撑板8顶部的两侧均开设有凹槽16,并且支撑板8的顶部设置有防滑垫17,码垛箱2背面的两侧均活动连接有活动板9,活动板9的内部开设有与第二伺服电缸14相适配的第二活动槽15,并且第二伺服电缸14输出轴的一端与第二活动槽15内壁的一侧固定连接,并且两个活动板9的一侧均与码垛箱2的内部活动连接,支撑板8的两侧均固定连接有活动块10,码垛箱2内部的两侧均开设有与活动块10相适配的第一安装槽11,并且活动块10的正面与背面分别与第一安装槽11内壁的正面与背面滑动连接,第一安装槽11内壁的底部设置有第一伺服电缸12,第一伺服电缸12与第二伺服电缸14的型号分别采用RSD500和RBX715型号电缸,并且第一伺服电缸12输出轴的顶端与活动块10的底部固定连接,说明书中所涉及的机械元件均通过控制器进行控制,同时本说明书中未作详细描述的内容均属于本领域技术人员公知的现有技术。
使用时,打开驱动电机21的工作开关,驱动电机21通过传动轮22与转轮20使传送带18在传动架3上进行传动,需要码垛的货物箱在传送架3的传送带18上进行定向传送,利用旋转台4上的机械臂5与抓手6对传送带18上的货物箱进行抓取,抓手6将货物箱抓取到码垛箱2内部的支撑板8上,然后第一伺服电缸12带动支撑板8向第一安装槽11的下部滑动,机械臂5与抓手6持续对货物箱进行抓取,货物箱在码垛箱2中进行堆码,堆码的同时通过活动板9对货物箱的轴向偏移进行修正,保证货物箱堆码的稳定性,完成堆码后利用第二伺服电缸14输出轴带动活动板9滑进第二安装槽13中,然后利用叉车的前叉进入凹槽16中,对堆码完成的货物箱进行转运,以上就是一种利用机器人码垛装箱装置全部工作原理。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
Claims (6)
1.一种机器人码垛装箱装置,包括底座(1)、码垛箱(2)和传送架(3),所述底座(1)位于码垛箱(2)的正面,并且传送架(3)位于底座(1)的正面,其特征在于:所述底座(1)的顶部转动连接有旋转台(4),所述旋转台(4)的顶部固定连接有机械臂(5),并且机械臂(5)的一端通过安装件固定连接有抓手(6),所述码垛箱(2)的内部开设有第一活动槽(7),并且第一活动槽(7)的内壁滑动连接有支撑板(8),所述码垛箱(2)背面的两侧均活动连接有活动板(9),并且两个活动板(9)的一侧均与码垛箱(2)的内部活动连接,所述支撑板(8)的两侧均固定连接有活动块(10),所述码垛箱(2)内部的两侧均开设有与活动块(10)相适配的第一安装槽(11),并且活动块(10)的正面与背面分别与第一安装槽(11)内壁的正面与背面滑动连接,所述第一安装槽(11)内壁的底部设置有第一伺服电缸(12),并且第一伺服电缸(12)输出轴的顶端与活动块(10)的底部固定连接。
2.根据权利要求1所述的一种机器人码垛装箱装置,其特征在于:所述码垛箱(2)背面的两侧均开设有与活动板(9)相适配的第二安装槽(13),并且两个第二安装槽(13)内壁的一侧均设置有第二伺服电缸(14),所述活动板(9)的表面与第二安装槽(13)的内壁滑动连接。
3.根据权利要求2所述的一种机器人码垛装箱装置,其特征在于:所述活动板(9)的内部开设有与第二伺服电缸(14)相适配的第二活动槽(15),并且第二伺服电缸(14)输出轴的一端与第二活动槽(15)内壁的一侧固定连接。
4.根据权利要求1所述的一种机器人码垛装箱装置,其特征在于:所述支撑板(8)顶部的两侧均开设有凹槽(16),并且支撑板(8)的顶部设置有防滑垫(17)。
5.根据权利要求1所述的一种机器人码垛装箱装置,其特征在于:所述传送架(3)的顶部活动连接有传送带(18),并且传送架(3)两侧的正面与背面均固定连接有支撑座(19)。
6.根据权利要求1所述的一种机器人码垛装箱装置,其特征在于:所述传送架(3)正面的两侧分别设置有转轮(20)与驱动电机(21),所述驱动电机(21)输出轴的表面固定连接有传动轮(22),并且传动轮(22)与转轮(20)的表面之间通过皮带传动连接。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921604471.8U CN210943934U (zh) | 2019-09-25 | 2019-09-25 | 一种机器人码垛装箱装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921604471.8U CN210943934U (zh) | 2019-09-25 | 2019-09-25 | 一种机器人码垛装箱装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN210943934U true CN210943934U (zh) | 2020-07-07 |
Family
ID=71377682
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201921604471.8U Expired - Fee Related CN210943934U (zh) | 2019-09-25 | 2019-09-25 | 一种机器人码垛装箱装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN210943934U (zh) |
-
2019
- 2019-09-25 CN CN201921604471.8U patent/CN210943934U/zh not_active Expired - Fee Related
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN210682419U (zh) | 一种胶片自动分拣码垛装置 | |
| CN215149099U (zh) | 一种多工位码垛机器人移位机构 | |
| CN111924550B (zh) | 一种整体式装车方法 | |
| CN215710133U (zh) | 一种瓦楞纸箱自动码垛装置 | |
| CN112977957A (zh) | 一种产品自动包装、传送和码垛系统 | |
| CN217024553U (zh) | 一种货车用袋装物料装车系统 | |
| CN111807080A (zh) | 一种整车装车机 | |
| CN209815198U (zh) | 一种向集装箱内自动装货的装置 | |
| CN112478586B (zh) | 一种物料自动换驳输送装置及其控制方法 | |
| CN210943934U (zh) | 一种机器人码垛装箱装置 | |
| CN212100603U (zh) | 免拆模板码垛机 | |
| CN112173739A (zh) | 一种物料码垛输送装置、应用该装置的码垛机及码垛方法 | |
| CN217576847U (zh) | 一种低位码垛机的进料装置 | |
| CN103009675A (zh) | 全自动纸箱双面粘胶带机 | |
| CN112896633B (zh) | 卷烟配送订单多规格纸箱装箱方法及装箱系统 | |
| CN115385079A (zh) | 一种用于搬运物流包裹的物流码垛机 | |
| CN212268890U (zh) | 一种整车装车机 | |
| CN216736520U (zh) | 一种循环输送式码垛机 | |
| CN210102958U (zh) | 一种工业机器人码垛装置 | |
| CN211225531U (zh) | 一种成品自动化码垛装置 | |
| CN217417448U (zh) | 一种新型具有高效稳定性的码垛机 | |
| CN215826052U (zh) | 一种上箱机器人的纸箱板输送装置 | |
| CN212686927U (zh) | 一种饮料生产用立式码垛机 | |
| CN217397790U (zh) | 一种包装后铜卷码垛机 | |
| CN217894325U (zh) | 一种带有运输固定件的码垛机运输装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20200707 Termination date: 20210925 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |