CN210682392U - 一种采用双机械手协同作业的托盘搬运装置 - Google Patents
一种采用双机械手协同作业的托盘搬运装置 Download PDFInfo
- Publication number
- CN210682392U CN210682392U CN201921378712.1U CN201921378712U CN210682392U CN 210682392 U CN210682392 U CN 210682392U CN 201921378712 U CN201921378712 U CN 201921378712U CN 210682392 U CN210682392 U CN 210682392U
- Authority
- CN
- China
- Prior art keywords
- clamping part
- transverse
- longitudinal
- manipulators
- rotating shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

Landscapes
- Specific Conveyance Elements (AREA)
- Manipulator (AREA)
Abstract
本实用新型公开了一种采用双机械手协同作业的托盘搬运装置,包括至少两组搬运机械手,每一组搬运机械手均包括夹持部、控制夹持部升降的纵向移动组件和控制夹持部水平移动的横向移动组件;所述夹持部安装在一转轴上,转轴受驱动电机控制,带动夹持部水平转动360度;所述夹持部设有两个爪端,两爪端可相向或相反移动。本实用新型设置了至少两组搬运机械手,搬运机械手分工完成托盘的来回移动,整个过程同步进行,互不影响,有效的将加工设备的停机等待时间缩短到3s以内,使加工区域的设备一直可进行生产,极大地提高了生产效率。
Description
技术领域
本实用新型涉及物料输送系统,特别涉及一种采用双机械手协同作业的托盘搬运装置。
背景技术
而随着自动化的应用,出现了自动化输送搬运系统,包括辊筒输送线、搬运桁架机械手、定位机构、阻挡机构和工装承托机构,搬运桁架机械手架设在辊筒输送线正上方,定位机构位于搬运桁架机械手的后方并安装在辊筒输送线的一侧,阻挡机构位于定位机构的后方并安装在辊筒输送线上,工装承托机构位于所述辊筒输送线的末端并架设在辊筒输送线的正上方,工装承托机构正下方配合设有工装顶升机构,一般用来替换简单的人力操作。
使用时,待加工产品放置在托盘上,需要搬运桁架机械手将托盘从输送线搬到加工设备上进行加工,加工完成后,还需要搬运桁架机械手将托盘从加工设备搬回输送线上,而在托盘被搬回输送线以后,搬运桁架机械手再将新的托盘搬到加工设备上,而这一过程中,加工设备一直处于空闲状态,大大降低了整体的工作效率。
发明内容
本实用新型的目的是提供一种采用双机械手协同作业的托盘搬运装置,可以解决托盘从输送线到加工设备来回搬运过程时间太长的问题。
为此,本实用新型的技术方案是:一种采用双机械手协同作业的托盘搬运装置,其特征在于:包括至少两组搬运机械手,每一组搬运机械手均包括夹持部、控制夹持部升降的纵向移动组件和控制夹持部水平移动的横向移动组件;所述夹持部安装在一转轴上,转轴受驱动电机控制,带动夹持部水平转动360度;所述夹持部设有两个爪端,两爪端可相向或相反移动。
进一步地,所述夹持部通过转轴安装在一旋转支架上,转轴一端固定夹持部,另一端通过同步带轮组连接旋转驱动电机。
进一步地,所述纵向移动组件包括纵向气缸、纵向滑轨和纵向滑块,所述旋转支架固定安装在纵向滑块上,纵向滑块与纵向滑轨活动配合,纵向滑块与纵向气缸的气缸杆相连接,纵向气缸带动纵向滑块沿纵向滑轨移动。
进一步地,所述横向移动组件包括横向电机、丝杆、横向导轨和横向活动块,横向电机驱动横向丝杆旋转,横向活动块安装在横向丝杠上,两者旋转配合,且横向活动块置于横向导轨上,两者滑动配合,所述纵向移动组件安装在横向活动块上。
本实用新型单个机械手通过横向电机驱动丝杆转动,从而控制夹持部的横向移动;通过纵向移动气缸直接对夹持部的上下位置进行调整。在纵向和横向分别安装导轨,保证夹持部移动平稳可靠。同时通过驱动电机、同步带轮控制夹持部实现360°转动位置调整;同步带轮上还可以配有张紧机构,保证同步带传动有效性。夹持部的两爪端可相向或相反移动,可自动调节夹持部的宽度,以适应不同规格的托盘,并能根据加工设备加工时对产品姿态的要求,任意角度旋转托盘方向;夹持部可调节度范围185mm~500mm,夹持部旋转角度精度±0.1°。
本实用新型设置了至少两组搬运机械手,其中一组搬运机械手可以夹取托盘放置到加工区域,等待前一托盘完成加工,而第二组搬运机械手则将完成后的托盘夹取回输送机构上,整个过程同步进行,互不影响,有效的将加工设备的停机等待时间缩短到3s以内,使加工区域的设备一直可进行生产,极大地提高了生产效率。
附图说明
以下结合附图和本实用新型的实施方式来作进一步详细说明
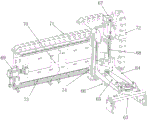
图1为本实用新型的结构示意图;
图2为单个搬运机械手的结构示意图。
图中标记为:第一搬运机械手61、第二搬运机械手62、夹持部63、旋转支架64、同步带轮组65、旋转驱动电机66、纵向气缸67、纵向滑轨68、横向电机69、横向丝杆70、横向拖链71、纵向拖链72、横向导轨73、横向活动块74。
具体实施方式
参见附图。本实施例包括两组搬运机械手,第一搬运机械手61可以夹取托盘放置到加工区域,等待前一托盘完成加工,而第二搬运机械手62则将完成后的托盘夹取回输送机构上,整个过程同步进行,互不影响。
每一组搬运机械手均包括夹持部63,夹持部设有两个爪端,两爪端可相向或相反移动;所述夹持部63通过转轴安装在一旋转支架64上,转轴一端固定夹持部,另一端通过同步带轮组65连接旋转驱动电机66,受驱动电机控制,带动夹持部63水平转动360度;还包括控制夹持部63升降的纵向移动组件和控制夹持部63水平移动的横向移动组件。
所述纵向移动组件包括纵向气缸67、纵向滑轨68和纵向滑块,所述旋转支架64固定安装在纵向滑块上,纵向滑块与纵向滑轨活动配合,纵向滑块与纵向气缸67的气缸杆相连接,纵向气缸67带动纵向滑块沿纵向滑轨移动,从而实现夹持部63在竖直方向的升降移动。
所述横向移动组件包括横向电机69、横向丝杆70、横向导轨73和横向活动块74,横向电机69驱动横向丝杆70旋转,横向活动块74安装在横向丝杠70上,两者旋转配合,且横向活动块74置于横向导轨73上,两者滑动配合,从而横向丝杆70旋转,使得横向活动块74沿横向导轨73水平移动。纵向移动组件安装在横向活动块74上,从而实现夹持部63在水平方向的来回移动。搬运机器人上还设有横向拖链71和纵向拖链72,束缚电缆,方便夹持部在水平方向和竖直方向上移动。
Claims (4)
1.一种采用双机械手协同作业的托盘搬运装置,其特征在于:包括至少两组搬运机械手,每一组搬运机械手均包括夹持部、控制夹持部升降的纵向移动组件和控制夹持部水平移动的横向移动组件;所述夹持部安装在一转轴上,转轴受驱动电机控制,带动夹持部水平转动360度;所述夹持部设有两个爪端,两爪端可相向或相反移动。
2.如权利要求1所述的一种采用双机械手协同作业的托盘搬运装置,其特征在于:所述夹持部通过转轴安装在一旋转支架上,转轴一端固定夹持部,另一端通过同步带轮组连接旋转驱动电机。
3.如权利要求2所述的一种采用双机械手协同作业的托盘搬运装置,其特征在于:所述纵向移动组件包括纵向气缸、纵向滑轨和纵向滑块,所述旋转支架固定安装在纵向滑块上,纵向滑块与纵向滑轨活动配合,纵向滑块与纵向气缸的气缸杆相连接,纵向气缸带动纵向滑块沿纵向滑轨移动。
4.如权利要求1所述的一种采用双机械手协同作业的托盘搬运装置,其特征在于:所述横向移动组件包括横向电机、丝杆、横向导轨和横向活动块,横向电机驱动横向丝杆旋转,横向活动块安装在横向丝杠上,两者旋转配合,且横向活动块置于横向导轨上,两者滑动配合,所述纵向移动组件安装在横向活动块上。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921378712.1U CN210682392U (zh) | 2019-08-23 | 2019-08-23 | 一种采用双机械手协同作业的托盘搬运装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921378712.1U CN210682392U (zh) | 2019-08-23 | 2019-08-23 | 一种采用双机械手协同作业的托盘搬运装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN210682392U true CN210682392U (zh) | 2020-06-05 |
Family
ID=70889216
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201921378712.1U Active CN210682392U (zh) | 2019-08-23 | 2019-08-23 | 一种采用双机械手协同作业的托盘搬运装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN210682392U (zh) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110540027A (zh) * | 2019-08-23 | 2019-12-06 | 杭州优智物联科技有限公司 | 一种智能输送系统及方法 |
| CN111891743A (zh) * | 2020-08-05 | 2020-11-06 | 陈卫华 | 一种用于奶茶机的过渡转移搬运装置 |
| CN113501291A (zh) * | 2021-07-21 | 2021-10-15 | 珠海格力智能装备有限公司 | 移载机构及具有其的生产线 |
-
2019
- 2019-08-23 CN CN201921378712.1U patent/CN210682392U/zh active Active
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110540027A (zh) * | 2019-08-23 | 2019-12-06 | 杭州优智物联科技有限公司 | 一种智能输送系统及方法 |
| CN110540027B (zh) * | 2019-08-23 | 2024-06-11 | 浙江优智物联科技有限公司 | 一种智能输送系统及方法 |
| CN111891743A (zh) * | 2020-08-05 | 2020-11-06 | 陈卫华 | 一种用于奶茶机的过渡转移搬运装置 |
| CN113501291A (zh) * | 2021-07-21 | 2021-10-15 | 珠海格力智能装备有限公司 | 移载机构及具有其的生产线 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN210682392U (zh) | 一种采用双机械手协同作业的托盘搬运装置 | |
| CN103056874B (zh) | 一种高速搬送机械手 | |
| JP6174261B2 (ja) | ワーク用の搬送装置 | |
| JP4692163B2 (ja) | ワーク位置決め支持装置及びワーク位置決め支持方法 | |
| CN204819563U (zh) | 多向机械臂 | |
| KR101860195B1 (ko) | 트랜스퍼 로봇 및 그 트랜스퍼 로봇을 이용한 이송 시스템 | |
| CN107685218B (zh) | 一种焊接加工线 | |
| CN111653510B (zh) | 一种石墨舟搬运设备及搬运方法 | |
| CN104117734B (zh) | 倒角加工装置 | |
| CN109279341A (zh) | 一种运用于陶瓷辊棒生产的承托件上、下料设备 | |
| CN206886089U (zh) | 一种料仓系统 | |
| CN210084414U (zh) | 多轴移动和自动上料的机械手 | |
| CN107472855A (zh) | 一种料仓系统 | |
| CN110039280B (zh) | 一种拉紧器轴销自动装配装置及装配方法 | |
| CN216505182U (zh) | 一种工业机器人用机械抓取装置 | |
| CN114030849B (zh) | 一种钢管内外壁涂覆生产线的上件装置 | |
| CN115771734A (zh) | 一种桁架式码垛机器人 | |
| CN107159761A (zh) | 卧式折弯机 | |
| CN211077623U (zh) | 一种夹取移动装置 | |
| CN209720930U (zh) | 电池上下料机构 | |
| KR100837158B1 (ko) | 소재이송용 로봇 및 그를 사용한 단조 업세팅 방법 | |
| CN108568692B (zh) | 一种机位上下料设备 | |
| CN221562152U (zh) | 一种十轴伺服机械手 | |
| CN220560842U (zh) | 用于塑封组件的自动组装设备 | |
| CN202542372U (zh) | 模块式自动化生产设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |