CN203344046U - 推水器支架焊接机器人 - Google Patents
推水器支架焊接机器人 Download PDFInfo
- Publication number
- CN203344046U CN203344046U CN 201320419535 CN201320419535U CN203344046U CN 203344046 U CN203344046 U CN 203344046U CN 201320419535 CN201320419535 CN 201320419535 CN 201320419535 U CN201320419535 U CN 201320419535U CN 203344046 U CN203344046 U CN 203344046U
- Authority
- CN
- China
- Prior art keywords
- ball screw
- large arm
- axis
- forearm
- base
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Landscapes
- Resistance Welding (AREA)
Abstract
本实用新型公开了一种推水器支架焊接机器人,属于机器人技术领域,包括底座、大臂、小臂、电机及控制箱,大臂固定于底座上,小臂与小臂连接,控制箱与底座、大臂、小臂上的电机联接,底座主要由X轴步进电机、导轨、X轴滚珠丝杆、丝杆螺母、工作台组成,大臂主要由大臂外壳、光杆、支架板、Z轴步进电机和Z轴滚珠丝杆组成,小臂主要由连接杆、小臂外壳、Y轴滚珠丝杆、丝杆螺母、Y轴步进电机组成,控制箱控制整个机械的工作,其上设置有控制面板。本实用新型结构简单,通过简单的机械结构设计,实现自动焊接操作,自动化程度高,省时省力,焊接效率高,焊接质量稳定,且生产成本较低,适宜推广应用。
Description
技术领域
本实用新型涉及一种自动化生产加工设备,尤其涉及到一种用于支架焊接用的推水器支架焊接机器人,属于机器人技术领域。
背景技术
机器人是自动执行工作的机器装置,它可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。
工业生产过程中常会涉及到焊接环节,现有技术中焊接这一工序通常是人工操作,如推水器支架的焊接,人工操作存在以下问题:焊接的质量依赖技工的焊接水平,且劳动强度大,技工疲劳也会影响焊接的质量,焊接中产生的烟雾对人们的健康也会造成危害,尤其对人们的眼睛存在安全隐患,还有就是人工焊接较为浪费时间,焊接效率低。
发明内容
为了解决现有技术中存在的问题,本实用新型提供了一种推水器支架焊接机器人,无须人工操作,省时省力,焊接效率高,焊接质量稳定。
本实用新型的目的是通过如下的技术方案实现的。
推水器支架焊接机器人,包括底座、大臂、小臂、电机及控制箱,大臂固定于底座上,小臂与小臂连接,控制箱与底座、大臂、小臂上的电机联接。
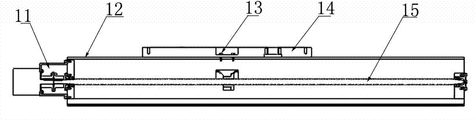
所述的底座,主要由X轴步进电机、导轨、X轴滚珠丝杆、丝杆螺母、工作台组成,导轨共有两个,其中一导轨上通过丝杆螺母固定有工作台,X轴步进电机与X轴滚珠丝杆连接,通过步进电机带动滚珠丝杆的运动,化电机的转动为与滚珠丝杆螺母联接着的工作台沿着导轨和滚珠丝杆的直线运动而达到完成X轴方向行程的目的,两根平行的的导轨能让工作台稳定的运动,而滚珠丝杆则能保证达到所要求的定位精度。
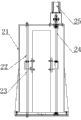
所述的大臂,主要由大臂外壳、光杆、支架板、Z轴步进电机和Z轴滚珠丝杆组成,光杆共有两根,两根光杆固定于大臂外壳上,Z轴步进电机和Z轴滚珠丝杆连接,Z轴滚珠丝杆与两根光杆平行,两根光杆和Z轴滚珠丝杆上分别连接有支架板,通过步进电机带动滚珠丝杆的运动使得支架板能够沿着滚珠丝杆和两根光杆上下移动,安装两根光杆能保证支架板稳定得沿着丝杆上下移动而不会造成卡死现象,当小臂伸出时,由于小臂重心的改变,势必会给支架板造成一定的弯矩,倘若只用一根光杆,则会让丝杠螺母的中心轴线与滚珠丝杆的中心轴线不重合,它们会产生一定的夹角,造成滚珠丝杆的定位精度下降,运动困难甚至卡死,加重磨损,减短滚珠丝杆的使用寿命;而用两根光杆则在滚珠丝杆和光杆间形成了一个稳定的三角形结构,很好得解决了这个问题。
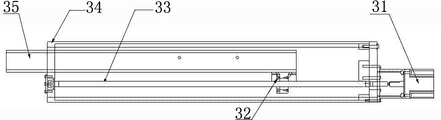
所述的小臂,主要由连接杆、小臂外壳、Y轴滚珠丝杆、丝杆螺母、Y轴步进电机组成,Y轴步进电机固定于小臂外壳上并与Y轴滚珠丝杆连接,Y轴滚珠丝杆上通过丝杆螺母连接有连接杆,连接杆上通过夹具连接焊枪,通过步进电机带动滚珠丝杆让连接杆沿着滚珠丝杆运动,进而实现焊枪沿着Y轴伸出或缩进。
所述的控制箱,设置于大臂顶部,并控制底座、大臂及小臂的工作,控制整个机械的工作,其上设置有控制面板,可以根据需要设定焊接程序,运动平稳可靠,保证了焊接的质量。
工作时,接通焊接电源,通过控制箱预设焊接的程序,控制箱控制底座、大臂及小臂的移动,使焊枪移动至工件位置进行焊接操作,无需人工操作,同时焊接质量稳定,焊接效率高。
本实用新型结构简单,通过简单的机械结构设计,实现自动焊接操作,自动化程度高,省时省力,焊接效率高,焊接质量稳定,且生产成本较低,适宜推广应用。
附图说明
图1为本实用新型一实施例结构示意图
图2为本实用新型一底座的实例结构示意图
图3为本实用新型一大臂的实例结构示意图
图4为本实用新型一小臂的实例结构示意图
图5为本实用新型中与小臂连接的焊枪一实施结构示意图
图中:1-底座,2-小臂,3-大臂,4-控制箱,5-夹具,6-焊枪,11-X轴步进电机,12-导轨,13-丝杆螺母,14-工作台,15-X轴滚珠丝杆,21-大臂外壳,22-光杆,23-支架板,24-Z轴滚珠丝杆,25-Z轴步进电机,31- Y轴步进电机,32-丝杆螺母,33- Y轴滚珠丝杆,34-小臂外壳,35-连接杆,61-导电嘴,62-喷嘴,63-焊丝。
具体实施方式
下面结合附图及实施例对本实用新型进一步进行说明
见图1~图4所示实施例,推水器支架焊接机器人,包括底座、大臂、小臂、电机及控制箱,大臂固定于底座上,小臂与小臂连接,控制箱与底座、大臂、小臂上的电机联接。
进一步地,所述的底座,主要由X轴步进电机、导轨、X轴滚珠丝杆、丝杆螺母、工作台组成,导轨共有两个,其中一导轨上通过丝杆螺母固定有工作台,X轴步进电机与X轴滚珠丝杆连接,通过步进电机带动滚珠丝杆的运动,化电机的转动为与滚珠丝杆螺母联接着的工作台沿着导轨和滚珠丝杆的直线运动而达到完成X轴方向行程的目的,两根平行的的导轨能让工作台稳定的运动,而滚珠丝杆则能保证达到所要求的定位精度。
进一步地,所述的大臂,主要由大臂外壳、光杆、支架板、Z轴步进电机和Z轴滚珠丝杆组成,光杆共有两根,两根光杆固定于大臂外壳上,Z轴步进电机和Z轴滚珠丝杆连接,Z轴滚珠丝杆与两根光杆平行,两根光杆和Z轴滚珠丝杆上分别连接有支架板,通过步进电机带动滚珠丝杆的运动使得支架板能够沿着滚珠丝杆和两根光杆上下移动,安装两根光杆能保证支架板稳定得沿着丝杆上下移动而不会造成卡死现象,当小臂伸出时,由于小臂重心的改变,势必会给支架板造成一定的弯矩,倘若只用一根光杆,则会让丝杠螺母的中心轴线与滚珠丝杆的中心轴线不重合,它们会产生一定的夹角,造成滚珠丝杆的定位精度下降,运动困难甚至卡死,加重磨损,减短滚珠丝杆的使用寿命;而用两根光杆则在滚珠丝杆和光杆间形成了一个稳定的三角形结构,很好得解决了这个问题。
进一步地,所述的小臂,主要由连接杆、小臂外壳、Y轴滚珠丝杆、丝杆螺母、Y轴步进电机组成,Y轴步进电机固定于小臂外壳上并与Y轴滚珠丝杆连接,Y轴滚珠丝杆上通过丝杆螺母连接有连接杆,见图5,连接杆上通过夹具连接焊枪,通过步进电机带动滚珠丝杆让连接杆沿着滚珠丝杆运动,进而实现焊枪沿着Y轴伸出或缩进。
进一步地,所述的控制箱,设置于大臂顶部,并控制底座、大臂及小臂的工作,控制整个机械的工作,其上设置有控制面板,可以根据需要设定焊接程序,运动平稳可靠,保证了焊接的质量。
所述的控制箱也可采用外接式控制,内置有示教盒,并控制有送丝机,实现自动焊接操作。
本实用新型结构简单、控制方便、焊接质量稳定、焊接效率高。
工作时,接通焊接电源,通过控制箱预设焊接的程序,控制箱控制底座、大臂及小臂的移动,使焊枪移动至推水器支架放置的位置进行焊接操作,无需人工操作,同时焊接质量稳定,焊接效率高。
本实用新型不仅用于推水器支架的焊接,也可应用于其他需要焊接操作的工件焊接,在此本实用新型不再举例说明。
Claims (5)
1.推水器支架焊接机器人,包括底座、大臂、小臂、电机及控制箱,其特征在于,大臂固定于底座上,小臂与小臂连接,控制箱与底座、大臂、小臂上的电机联接。
2.根据权利要求1所述的推水器支架焊接机器人,其特征在于,所述的底座,主要由X轴步进电机、导轨、X轴滚珠丝杆、丝杆螺母、工作台组成,导轨共有两个,其中一导轨上通过丝杆螺母固定有工作台,X轴步进电机与X轴滚珠丝杆连接。
3.根据权利要求1所述的推水器支架焊接机器人,其特征在于,所述的大臂,主要由大臂外壳、光杆、支架板、Z轴步进电机和Z轴滚珠丝杆组成,光杆共有两根,两根光杆固定于大臂外壳上,Z轴步进电机和Z轴滚珠丝杆连接,Z轴滚珠丝杆与两根光杆平行,两根光杆和Z轴滚珠丝杆上分别连接有支架板。
4.根据权利要求1所述的推水器支架焊接机器人,其特征在于,所述的小臂,主要由连接杆、小臂外壳、Y轴滚珠丝杆、丝杆螺母、Y轴步进电机组成,Y轴步进电机固定于小臂外壳上并与Y轴滚珠丝杆连接,Y轴滚珠丝杆上通过丝杆螺母连接有连接杆,连接杆上通过夹具连接焊枪。
5.根据权利要求1所述的推水器支架焊接机器人,其特征在于,所述的控制箱,设置于大臂顶部,并控制底座、大臂及小臂的工作,控制整个机械的工作,其上设置有控制面板。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201320419535 CN203344046U (zh) | 2013-07-16 | 2013-07-16 | 推水器支架焊接机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201320419535 CN203344046U (zh) | 2013-07-16 | 2013-07-16 | 推水器支架焊接机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN203344046U true CN203344046U (zh) | 2013-12-18 |
Family
ID=49743979
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 201320419535 Expired - Fee Related CN203344046U (zh) | 2013-07-16 | 2013-07-16 | 推水器支架焊接机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN203344046U (zh) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105014270A (zh) * | 2015-08-10 | 2015-11-04 | 徐金鹏 | 一种自动焊接机器人 |
| CN106312396A (zh) * | 2016-09-25 | 2017-01-11 | 羊丁 | 一种钢珠与钢板焊接机器人 |
| CN106312387A (zh) * | 2016-09-25 | 2017-01-11 | 羊丁 | 一种钢珠与钢板焊接机器人 |
| CN106312395A (zh) * | 2016-09-25 | 2017-01-11 | 羊丁 | 一种钢珠与钢板焊接机器人 |
| CN107745393A (zh) * | 2017-10-15 | 2018-03-02 | 无锡市盛宝嘉科技有限公司 | 用于轴承套圈锻压上下料的平面关节机械手 |
-
2013
- 2013-07-16 CN CN 201320419535 patent/CN203344046U/zh not_active Expired - Fee Related
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105014270A (zh) * | 2015-08-10 | 2015-11-04 | 徐金鹏 | 一种自动焊接机器人 |
| CN105014270B (zh) * | 2015-08-10 | 2016-08-24 | 哈尔滨工大服务机器人有限公司 | 一种自动焊接机器人 |
| CN106312396A (zh) * | 2016-09-25 | 2017-01-11 | 羊丁 | 一种钢珠与钢板焊接机器人 |
| CN106312387A (zh) * | 2016-09-25 | 2017-01-11 | 羊丁 | 一种钢珠与钢板焊接机器人 |
| CN106312395A (zh) * | 2016-09-25 | 2017-01-11 | 羊丁 | 一种钢珠与钢板焊接机器人 |
| CN106312396B (zh) * | 2016-09-25 | 2018-07-06 | 杨志平 | 一种钢珠与钢板焊接机器人 |
| CN107745393A (zh) * | 2017-10-15 | 2018-03-02 | 无锡市盛宝嘉科技有限公司 | 用于轴承套圈锻压上下料的平面关节机械手 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN203344046U (zh) | 推水器支架焊接机器人 | |
| CN203778918U (zh) | 一种视觉定位4轴异形条锡丝自动焊接机 | |
| CN208326652U (zh) | 一种抓取机构 | |
| CN102990206B (zh) | 大中直径钛弯头纵向剖合面焊缝数控氩弧自动焊机 | |
| CN205733544U (zh) | 一种智能型焊接机械手 | |
| CN204308460U (zh) | 一种数控焊接机 | |
| CN207806959U (zh) | 一种数控机器人自动焊接设备 | |
| CN103586680A (zh) | 一种用于垂直装配的平衡臂机构及其调整方法 | |
| CN104057222A (zh) | 四轴联动智能循迹焊接机 | |
| CN203380530U (zh) | 相贯线焊接机 | |
| CN204893261U (zh) | 五轴焊接机械手 | |
| CN104772644A (zh) | 数控机床的组装式通用型上下料机械手 | |
| CN204221785U (zh) | 一种工业机器人 | |
| CN204365944U (zh) | 三轴铆钉机 | |
| CN104139149A (zh) | 铰链自动铆接机 | |
| CN202555992U (zh) | 环缝自动焊机 | |
| CN202861676U (zh) | 全自动多点点焊设备 | |
| CN203992229U (zh) | 铰链自动铆接机 | |
| CN203184863U (zh) | 应用于直角坐标系焊接机器人的悬臂式滑轨机构 | |
| CN204893935U (zh) | 一种飞机舱罩自动化吊运机械手 | |
| CN204430049U (zh) | 一种转子叠片自动送料装置 | |
| CN205217837U (zh) | 一种冲床取件机械手 | |
| CN205342283U (zh) | 一种机械手自动化焊接装置 | |
| CN103537782A (zh) | Plc控制的自动化焊接系统及其控制方法 | |
| CN203778920U (zh) | 一种视觉定位异形条单头锡丝自动焊接机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20131218 Termination date: 20170716 |