CN202640367U - 组件封装机器人多功能夹具 - Google Patents
组件封装机器人多功能夹具 Download PDFInfo
- Publication number
- CN202640367U CN202640367U CN 201220321727 CN201220321727U CN202640367U CN 202640367 U CN202640367 U CN 202640367U CN 201220321727 CN201220321727 CN 201220321727 CN 201220321727 U CN201220321727 U CN 201220321727U CN 202640367 U CN202640367 U CN 202640367U
- Authority
- CN
- China
- Prior art keywords
- anchor clamps
- fragility
- assembly
- grasping body
- component package
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images


Abstract
本实用新型涉及一种组件封装机器人多功能夹具,其中工业机器人安设在主体骨架上,柔软性物体抓取夹具总成竖向安设在主体骨架上,重物抓取夹具总成和易碎性物体抓取夹具骨架分别上下可移动设置在主体骨架上,易碎性物体抓取夹具总成竖向安设在易碎性物体抓取夹具骨架上。较佳的,吸盘升降机构安设在主体骨架上并连接重物抓取夹具总成的重物抓取夹具用于驱动重物抓取夹具上下移动,骨架升降机构安设在主体骨架上并连接易碎性物体抓取夹具骨架用于驱动易碎性物体抓取夹具骨架上下移动。本实用新型的组件封装机器人多功能夹具设计巧妙,结构简洁,在提高组件生产的精度与稳定性前提下,降低用人成本,提高工作效率,适于大规模推广应用。
Description
技术领域
本实用新型涉及电器行业与太阳能行业组件封装生产技术领域,特别涉及组件封装设备技术领域,具体是指一种组件封装机器人多功能夹具。
背景技术
在组件封装的生产过程中,通常需要采用几种不同性能的材料组装封装在一起。
目前电子电器行业组件与太阳能行业光伏组件一般是依赖手工操作或借助另外的工装生产模式,需要大量的劳动力,同时对产品的质量没保证,产出效率低下。而在组件中承重较大的物料重量也较大,人工组装组件劳动强度大。对易碎的物料人工组装时,工作效率低,达标率低,而且此物料一般价格较贵。
因此,为了解决存在的上述问题与缺陷,需要提供一种装置,在提高组件生产的精度与稳定性前提下,降低用人成本,提高工作效率。
实用新型内容
本实用新型的目的是克服了上述现有技术中的缺点,提供一种组件封装机器人多功能夹具,该组件封装机器人多功能夹具设计巧妙,结构简洁,在提高组件生产的精度与稳定性前提下,降低用人成本,提高工作效率,适于大规模推广应用。
为了实现上述目的,本实用新型的组件封装机器人多功能夹具,其特点是,包括工业机器人、主体骨架、重物抓取夹具总成、柔软性物体抓取夹具总成、易碎性物体抓取夹具骨架和易碎性物体抓取夹具总成,所述工业机器人安设在所述主体骨架上,所述柔软性物体抓取夹具总成竖向安设在所述主体骨架上,所述重物抓取夹具总成和所述易碎性物体抓取夹具骨架分别上下可移动设置在所述主体骨架上,所述易碎性物体抓取夹具总成竖向安设在所述易碎性物体抓取夹具骨架上。
此处提到的重物是指:物体本身重量较大,本身的强度刚度高,在抓取时不会变形、不会漏真空,主要难度是克服其重力做功。如光伏玻璃、塑料板、铁板等。
此处提到的柔软性物体是指:物体本身重量轻但其强度和刚度低,在抓取时变形,有时候会透气泄漏真空。主要难度是克服抓取变形最后又需要平铺。如光伏EVA、尼龙薄膜、隔离纸等。
此处提到的易碎性物体是指:物体本身重量轻其强度与刚度低,一碰即碎,在抓取时主要是保证其成品率。如太阳能单晶体硅电磁片等。
较佳的,所述组件封装机器人多功能夹具还包括法兰,所述工业机器人通过所述法兰固定在所述主体骨架上。
较佳的,所述主体骨架包括若干型材和若干型材连接板,所述型材通过所述型材连接板相互连接,所述工业机器人安设在所述型材上,所述柔软性物体抓取夹具总成竖向安设在所述型材上,所述重物抓取夹具总成和所述易碎性物体抓取夹具骨架分别上下可移动设置在所述型材上。
较佳的,所述组件封装机器人多功能夹具还包括吸盘升降机构,所述重物抓取夹具总成包括相互气路连接的气源和重物抓取夹具,所述吸盘升降机构安设在所述主体骨架上并连接所述重物抓取夹具用于驱动所述重物抓取夹具上下移动。
较佳的,所述柔软性物体抓取夹具总成包括气源、波纹吸盘、固定座、连接杆、支撑套和缓冲弹性部件,所述固定座固定在所述主体骨架上,所述支撑套固定在所述固定座下面,所述连接杆上下可移动插设在所述支撑套和所述固定座中并由所述固定座上端限位,所述波纹吸盘安设在所述连接杆的下端并气路连接所述气源,所述缓冲弹性部件位于所述支撑套和所述连接杆之间并分别抵靠所述支撑套和所述连接杆。
更佳的,所述缓冲弹性部件是弹簧,所述弹簧套设在所述连接杆上并分别抵靠所述支撑套和所述连接杆。
较佳的,所述组件封装机器人多功能夹具还包括骨架升降机构,所述骨架升降机构安设在所述主体骨架上并连接所述易碎性物体抓取夹具骨架用于驱动所述易碎性物体抓取夹具骨架上下移动。
较佳的,所述易碎性物体抓取夹具总成包括相互气路连接的气源和海绵吸盘,所述海绵吸盘竖向安设在所述易碎性物体抓取夹具骨架上。
较佳的,所述组件封装机器人多功能夹具还包括固定件,所述易碎性物体抓取夹具总成通过所述固定件竖向固定在所述易碎性物体抓取夹具骨架上。
较佳的,所述组件封装机器人多功能夹具还包括控制机构,所述控制机构电路连接所述工业机器人、所述重物抓取夹具总成、所述柔软性物体抓取夹具总成和所述易碎性物体抓取夹具总成。
本实用新型的有益效果具体在于:
1、本实用新型的组件封装机器人多功能夹具包括工业机器人、主体骨架、重物抓取夹具总成、柔软性物体抓取夹具总成、易碎性物体抓取夹具骨架和易碎性物体抓取夹具总成,所述工业机器人安设在所述主体骨架上,所述柔软性物体抓取夹具总成竖向安设在所述主体骨架上,所述重物抓取夹具总成和所述易碎性物体抓取夹具骨架分别上下可移动设置在所述主体骨架上,所述易碎性物体抓取夹具总成竖向安设在所述易碎性物体抓取夹具骨架上,从而可以实现重物、柔软性物体和易碎性物体的抓取,设计巧妙,结构简洁,在提高组件生产的精度与稳定性前提下,降低用人成本,提高工作效率,适于大规模推广应用。
2、本实用新型的组件封装机器人多功能夹具的所述柔软性物体抓取夹具总成包括气源、波纹吸盘、固定座、连接杆、支撑套和缓冲弹性部件,所述固定座固定在所述主体骨架上,所述支撑套固定在所述固定座下面,所述连接杆上下可移动插设在所述支撑套和所述固定座中并由所述固定座上端限位,所述波纹吸盘安设在所述连接杆的下端并气路连接所述气源,所述缓冲弹性部件位于所述支撑套和所述连接杆之间并分别抵靠所述支撑套和所述连接杆,从而可以实现柔软性物体的抓取,设计巧妙,结构简洁,在提高组件生产的精度与稳定性前提下,降低用人成本,提高工作效率,适于大规模推广应用。
3、本实用新型的组件封装机器人多功能夹具的所述易碎性物体抓取夹具总成包括相互气路连接的气源和海绵吸盘,所述海绵吸盘竖向安设在所述易碎性物体抓取夹具骨架上,从而可以实现易碎性物体的抓取,设计巧妙,结构简洁,在提高组件生产的精度与稳定性前提下,降低用人成本,提高工作效率,适于大规模推广应用。
附图说明
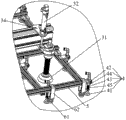
图1是本实用新型的一具体实施例的立体示意图。
图2是图1所示的具体实施例的局部放大示意图一。
图3是图1所示的具体实施例的局部放大示意图二。
图4是图1所示的具体实施例的局部放大示意图三。
具体实施方式
为了能够更清楚地理解本实用新型的技术内容,特举以下实施例详细说明。
请参见图1-图4所示,本实用新型的组件封装机器人多功能夹具包括工业机器人1、主体骨架2、重物抓取夹具总成3、柔软性物体抓取夹具总成4、易碎性物体抓取夹具骨架5和易碎性物体抓取夹具总成6,所述工业机器人1安设在所述主体骨架2上,所述柔软性物体抓取夹具总成4竖向安设在所述主体骨架2上,所述重物抓取夹具总成3和所述易碎性物体抓取夹具骨架5分别上下可移动设置在所述主体骨架2上,所述易碎性物体抓取夹具总成6竖向安设在所述易碎性物体抓取夹具骨架5上。
所述工业机器人1可以采用任何合适的现有市售工业机器人,请参见图1所示,在实用新型的具体实施例中,工业机器人1采用世界先进机器人制造商(德国KUKA,日本Kawasaki)的硬件和软件给系统的搬运和组装提供动力和运动轨迹。采用六轴工业机器人的灵活性,机器人可以在抓取组件走任何路线并可以使组件成任何角度进行密封。同时可以适应实际场地调整机器人位置,在机器人抓取各种不同类型的物料进行组装、封装带来灵活性。
所述工业机器人1安设在所述主体骨架2上可以采用任何合适的结构,请参见图1-图2所示,在本实用新型的具体实施例中,所述组件封装机器人多功能夹具还包括法兰22,所述工业机器人1通过所述法兰22固定在所述主体骨架2上。
所述主体骨架2可以采用任何合适的结构,请参见图1-图2所示,在本实用新型的具体实施例中,所述主体骨架2包括若干型材21和若干型材连接板23,所述型材21通过所述型材连接板23相互连接(型材21可横竖排列连接),所述工业机器人1安设在所述型材21上,所述柔软性物体抓取夹具总成4竖向安设在所述型材21上,所述重物抓取夹具总成3和所述易碎性物体抓取夹具骨架5分别上下可移动设置在所述型材21上。
所述重物抓取夹具总成3上下可移动设置在所述主体骨架2上可以采用任何合适的结构,请参见图1和图4所示,在本实用新型的具体实施例中,所述组件封装机器人多功能夹具还包括吸盘升降机构32,所述重物抓取夹具总成3包括相互气路连接的气源(未示出)和重物抓取夹具31,所述吸盘升降机构32安设在所述主体骨架2上并连接所述重物抓取夹具31用于驱动所述重物抓取夹具31上下移动。
所述吸盘升降机构32可以采用任何合适的升降机构,请参见图1和图4所示,在本实用新型的具体实施例中,所述吸盘升降机构32是汽缸,可以通过汽缸固定板34固定在所述主体骨架2的型材21上。
所述柔软性物体抓取夹具总成4可以采用任何合适的结构,请参见图1和图4所示,在本实用新型的具体实施例中,所述柔软性物体抓取夹具总成4包括气源(未示出)、波纹吸盘41、固定座42、连接杆43、支撑套44和缓冲弹性部件45,所述固定座42固定在所述主体骨架2上,所述支撑套44固定在所述固定座42下面,所述连接杆43上下可移动插设在所述支撑套44和所述固定座42中并由所述固定座42上端限位(例如在连接杆43上端设置凸缘),所述波纹吸盘41安设在所述连接杆43的下端并气路连接所述气源,所述缓冲弹性部件45位于所述支撑套44和所述连接杆43之间并分别抵靠所述支撑套44和所述连接杆43。
所述缓冲弹性部件45可以采用任何合适的部件,请参见图1和图4所示,在本实用新型的具体实施例中,所述缓冲弹性部件45是弹簧,所述弹簧套设在所述连接杆43上并分别抵靠所述支撑套44和所述连接杆43。
所述易碎性物体抓取夹具骨架5上下可移动设置在所述主体骨架2上可以采用任何合适的结构,请参见图1和图3所示,在本实用新型的具体实施例中,所述组件封装机器人多功能夹具还包括骨架升降机构53,所述骨架升降机构53安设在所述主体骨架2上并连接所述易碎性物体抓取夹具骨架5用于驱动所述易碎性物体抓取夹具骨架5上下移动。
所述骨架升降机构53可以采用任何合适的升降机构,请参见图1和图3所示,在本实用新型的具体实施例中,所述骨架升降机构53是汽缸,可通过汽缸连接板52安装在主体骨架2的型材21上,所述易碎性物体抓取夹具骨架5可以是骨架型材。
所述易碎性物体抓取夹具总成6可以采用任何合适的结构,请参见图1和图4所示,在本实用新型的具体实施例中,所述易碎性物体抓取夹具总成6包括相互气路连接的气源(未示出)和海绵吸盘61,所述海绵吸盘61竖向安设在所述易碎性物体抓取夹具骨架5上。
所述易碎性物体抓取夹具总成6竖向安设在所述易碎性物体抓取夹具骨架5上可以采用任何合适的结构,请参见图1和图4所示,在本实用新型的具体实施例中,所述组件封装机器人多功能夹具还包括固定件62,所述易碎性物体抓取夹具总成6通过所述固定件62竖向固定在所述易碎性物体抓取夹具骨架5上。
为了实现全自动化控制,较佳的,所述组件封装机器人多功能夹具还包括控制机构(未示出),所述控制机构电路连接所述工业机器人1、所述重物抓取夹具总成3、所述柔软性物体抓取夹具总成4和易碎性物体抓取夹具总成6。在本实用新型的具体实施例中,所述控制机构电路连接所述工业机器人1、所述吸盘升降机构32、所述骨架升降机构53和所述气源(可以多个。也可以共用一个)。
使用本实用新型在给不同类型物料的组件组装的工作循环顺序可按客户的工艺不同而不同,以下以太阳能光伏组件一种工艺为例说明一个工作循环:抓取光伏玻璃、搬运、释放、抓取EVA薄膜、搬运、组装释放、抓取太阳能电磁片组、搬运、组装释放、抓取EVA薄膜、搬运、组装释放、抓取TPT板、搬运、组装释放。下面对这十五个过程作进一步详述。
抓取光伏玻璃:首先通过吸盘升降机构32释放使重物抓取吸盘31在波纹吸盘41下方,同时保证骨架升降机构53提升状态,保证重物抓取吸盘31在最下方,处于工作状态。此时重物抓取吸盘31将光伏玻璃抓取并离开原有位置。
搬运:工业机器人1将光伏玻璃搬运至组装工作台上方(未示出)。
释放:控制机构对重物抓取吸盘31断真空反吹压缩空气使光伏玻璃准确放至组装工作台上。
抓取EVA薄膜:首先通过吸盘升降机构32提升使重物抓取吸盘31隐藏在波纹吸盘41上方,同时保证骨架升降机构53提升状态,保证波纹吸盘41在最下方,处于工作状态。此时波纹吸盘41将EVA薄膜抓取并离开原有位置。
搬运:工业机器人1将EVA薄膜搬运至组装工作台光伏玻璃的上方。
释放:控制机构对波纹吸盘41断真空反吹压缩空气使EVA薄膜准确组装在光伏玻璃上。
抓取太阳能电磁片组:首先通过吸盘升降机构32提升使重物抓取吸盘31隐藏在波纹吸盘41上方,同时保证骨架升降机构53下降状态,保证海绵吸盘61在最下方,处于工作状态。此时海绵吸盘61将太阳能电磁片组抓取并离开原有位置。
搬运:工业机器人1将太阳能电磁片组搬运至组装工作台EVA薄膜的上方进行精确排布组装。
释放:控制机构对海绵吸盘61断真空使太阳能电磁片组精确排布组装在EVA薄膜上。
抓取EVA薄膜:首先通过吸盘升降机构32提升使重物抓取吸盘31隐藏在波纹吸盘41上方,同时保证骨架升降机构53提升状态,保证波纹吸盘41在最下方,处于工作状态。此时波纹吸盘41将EVA薄膜抓取并离开原有位置。
搬运:工业机器人1将EVA薄膜搬运至组装工作台太阳能电磁片组的上方。
释放:控制机构对波纹吸盘41断真空反吹压缩空气使EVA薄膜准确组装在太阳能电磁片组上。
抓取TPT板:首先通过吸盘升降机构32提升使重物抓取吸盘31隐藏在波纹吸盘41上方,同时保证骨架升降机构53提升状态,保证波纹吸盘41在最下方,处于工作状态。此时波纹吸盘41将TPT板抓取并离开原有位置。
搬运:工业机器人1将TPT板搬运至组装工作台EVA薄膜的上方。
释放:控制机构对波纹吸盘41断真空反吹压缩空气使TPT板准确组装在EVA薄膜上。
本实用新型的组件封装机器人多功能夹具包括工业机器人1、主体骨架2、重物抓取夹具总成3、柔软性物体抓取夹具总成4、易碎性物体抓取夹具骨架5和易碎性物体抓取夹具总成6。工业机器人1能提供连续或间断的动力来源,适用在不同的工作现场走不同的路径。各种夹具主要动力来源为气源,能保证组件组装、封装的洁净。通过吸盘升降机构32调节重物抓取夹具总成3位置,实现重物抓取夹具总成3与柔软性物体抓取夹具总成4以及易碎性物体抓取夹具总成6之间高度切换,通过骨架升降机构53调节易碎性物体抓取夹具总成6位置,实现易碎性物体抓取夹具总成6与重物抓取夹具总成3以及柔软性物体抓取夹具总成4之间高度切换,实现一机完成三种不同类型物料的抓取与组件组装。骨架为型材,夹具总成在骨架上布置安装位置调节方便,适应各种不同规格的组件能力强。本实用新型在提高组件生产的精度与稳定性前提下,解决以前生产的劳动强度大的问题,降低了用人成本,提高了工作效率,设计巧妙合理,适于大规模推广应用。
本实用新型可用于组件组装,根据组件对象的几何尺寸的不同,更改不同尺寸对应的参数,可以组装不同类型的组件,适合组件的自动化生产的操作,特别适用于连续不间断作业场合、自动化生产要求高、包装稳定性要求高的工况。
综上,本实用新型的组件封装机器人多功能夹具设计巧妙,结构简洁,在提高组件生产的精度与稳定性前提下,降低用人成本,提高工作效率,适于大规模推广应用。
在此说明书中,本实用新型已参照其特定的实施例作了描述。但是,很显然仍可以作出各种修改和变换而不背离本实用新型的精神和范围。因此,说明书和附图应被认为是说明性的而非限制性的。
Claims (10)
1.一种组件封装机器人多功能夹具,其特征在于,包括工业机器人、主体骨架、重物抓取夹具总成、柔软性物体抓取夹具总成、易碎性物体抓取夹具骨架和易碎性物体抓取夹具总成,所述工业机器人安设在所述主体骨架上,所述柔软性物体抓取夹具总成竖向安设在所述主体骨架上,所述重物抓取夹具总成和所述易碎性物体抓取夹具骨架分别上下可移动设置在所述主体骨架上,所述易碎性物体抓取夹具总成竖向安设在所述易碎性物体抓取夹具骨架上。
2.根据权利要求1所述的组件封装机器人多功能夹具,其特征在于,所述组件封装机器人多功能夹具还包括法兰,所述工业机器人通过所述法兰固定在所述主体骨架上。
3.根据权利要求1所述的组件封装机器人多功能夹具,其特征在于,所述主体骨架包括若干型材和若干型材连接板,所述型材通过所述型材连接板相互连接,所述工业机器人安设在所述型材上,所述柔软性物体抓取夹具总成竖向安设在所述型材上,所述重物抓取夹具总成和所述易碎性物体抓取夹具骨架分别上下可移动设置在所述型材上。
4.根据权利要求1所述的组件封装机器人多功能夹具,其特征在于,所述组件封装机器人多功能夹具还包括吸盘升降机构,所述重物抓取夹具总成包括相互气路连接的气源和重物抓取夹具,所述吸盘升降机构安设在所述主体骨架上并连接所述重物抓取夹具用于驱动所述重物抓取夹具上下移动。
5.根据权利要求1所述的组件封装机器人多功能夹具,其特征在于,所述柔软性物体抓取夹具总成包括气源、波纹吸盘、固定座、连接杆、支撑套和缓冲弹性部件,所述固定座固定在所述主体骨架上,所述支撑套固定在所述固定座下面,所述连接杆上下可移动插设在所述支撑套和所述固定座中并由所述固定座上端限位,所述波纹吸盘安设在所述连接杆的下端并气路连接所述气源,所述缓冲弹性部件位于所述支撑套和所述连接杆之间并分别抵靠所述支撑套和所述连接杆。
6.根据权利要求5所述的组件封装机器人多功能夹具,其特征在于,所述缓冲弹性部件是弹簧,所述弹簧套设在所述连接杆上并分别抵靠所述支撑套和所述连接杆。
7.根据权利要求1所述的组件封装机器人多功能夹具,其特征在于,所述组件封装机器人多功能夹具还包括骨架升降机构,所述骨架升降机构安设在所述主体骨架上并连接所述易碎性物体抓取夹具骨架用于驱动所述易碎性物体抓取夹具骨架上下移动。
8.根据权利要求1所述的组件封装机器人多功能夹具,其特征在于,所述易碎性物体抓取夹具总成包括相互气路连接的气源和海绵吸盘,所述海绵吸盘竖向安设在所述易碎性物体抓取夹具骨架上。
9.根据权利要求1所述的组件封装机器人多功能夹具,其特征在于,所述组件封装机器人多功能夹具还包括固定件,所述易碎性物体抓取夹具总成通过所述固定件竖向固定在所述易碎性物体抓取夹具骨架上。
10.根据权利要求1所述的组件封装机器人多功能夹具,其特征在于,所述组件封装机器人多功能夹具还包括控制机构,所述控制机构电路连接所述工业机器人、所述重物抓取夹具总成、所述柔软性物体抓取夹具总成和所述易碎性物体抓取夹具总成。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201220321727 CN202640367U (zh) | 2012-07-04 | 2012-07-04 | 组件封装机器人多功能夹具 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201220321727 CN202640367U (zh) | 2012-07-04 | 2012-07-04 | 组件封装机器人多功能夹具 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN202640367U true CN202640367U (zh) | 2013-01-02 |
Family
ID=47409532
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 201220321727 Expired - Lifetime CN202640367U (zh) | 2012-07-04 | 2012-07-04 | 组件封装机器人多功能夹具 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN202640367U (zh) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102717392A (zh) * | 2012-07-04 | 2012-10-10 | 上海埃蒙特自动化系统有限公司 | 组件封装机器人多功能夹具 |
| CN104400795A (zh) * | 2014-11-06 | 2015-03-11 | 上海复合材料科技有限公司 | 一种快速移动复合材料运动臂及其制备方法 |
| CN108190108A (zh) * | 2018-01-09 | 2018-06-22 | 广东聚胶粘合剂有限公司 | 一种热熔胶自动装箱系统及其自动装箱工艺 |
-
2012
- 2012-07-04 CN CN 201220321727 patent/CN202640367U/zh not_active Expired - Lifetime
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102717392A (zh) * | 2012-07-04 | 2012-10-10 | 上海埃蒙特自动化系统有限公司 | 组件封装机器人多功能夹具 |
| CN104400795A (zh) * | 2014-11-06 | 2015-03-11 | 上海复合材料科技有限公司 | 一种快速移动复合材料运动臂及其制备方法 |
| CN108190108A (zh) * | 2018-01-09 | 2018-06-22 | 广东聚胶粘合剂有限公司 | 一种热熔胶自动装箱系统及其自动装箱工艺 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102717392A (zh) | 组件封装机器人多功能夹具 | |
| CN203125525U (zh) | 用于水平多关节机器人的车用锂电池装配机械手 | |
| CN201999522U (zh) | 一种全自动硅片上下料机 | |
| CN202151862U (zh) | 烘烤夹具搬运机械手 | |
| CN102581840B (zh) | 纸基摩擦片送料机械手 | |
| CN106144473A (zh) | 一种机械手定位抓取机构 | |
| CN202607120U (zh) | 一种标准节自动焊接生产线 | |
| CN203529443U (zh) | 一种机械手搬运系统 | |
| CN202862210U (zh) | 太阳能玻璃管码放机械手 | |
| CN206955161U (zh) | 一种双料盒交替式不停机上料装置 | |
| CN202138564U (zh) | 一种瓷砖包装线码垛翻转装置 | |
| CN201458340U (zh) | 一种基板立式挂架的装载装置 | |
| CN203197525U (zh) | 一种密封圈压入机构 | |
| CN202640367U (zh) | 组件封装机器人多功能夹具 | |
| CN203652769U (zh) | 适用于家电产品的自适应纸箱抓手 | |
| CN105109726A (zh) | 薄膜太阳能电池板自动装箱装置 | |
| CN204322097U (zh) | 一种电-气折臂式机械手 | |
| CN201864059U (zh) | 一种瓷砖包角装置 | |
| CN203411063U (zh) | 小车上料装置 | |
| CN103029133A (zh) | 自动安装电源插头机械手 | |
| CN210285940U (zh) | 玻璃取放装置 | |
| CN205837978U (zh) | 一种双联单驱动抓取装置 | |
| CN202292254U (zh) | 洗衣机夹抱机械手 | |
| CN202508742U (zh) | 吸盘装置 | |
| CN103112723A (zh) | 墙砖全自动堆摞装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CX01 | Expiry of patent term | ||
| CX01 | Expiry of patent term |
Granted publication date: 20130102 |