CN201441335U - 一种外墙清洗装置及外墙清洗机器人 - Google Patents
一种外墙清洗装置及外墙清洗机器人 Download PDFInfo
- Publication number
- CN201441335U CN201441335U CN2009200027935U CN200920002793U CN201441335U CN 201441335 U CN201441335 U CN 201441335U CN 2009200027935 U CN2009200027935 U CN 2009200027935U CN 200920002793 U CN200920002793 U CN 200920002793U CN 201441335 U CN201441335 U CN 201441335U
- Authority
- CN
- China
- Prior art keywords
- cleaning
- external wall
- distance
- exterior wall
- working face
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Abstract
本实用新型提供一种外墙清洗装置,包括机架及安装在机架上的清洗器,还包括清洗距离调节装置,该清洗距离调节装置包括测量单元,用于检测并输出清洗装置与外墙工作面之间的距离信号;控制单元,用于根据所述距离信号输出驱动信号;驱动机构,用于根据所述驱动信号的极性推动机架作相应方向运动。因清洗距离调节装置可随时调节清洗装置与外墙工作面之间的距离,可以避免清洗刷不能很好接触外墙工作面而造成的空转、漏洗或擦洗力度不够,从而使外墙尤其是表面不平整的外墙得到全面、洁净的清洗,提高了工作效率。本实用新型还提供了一种包含所述外墙清洗装置的外墙清洗机器人。
Description
技术领域
本实用新型涉及清扫墙壁或墙上覆盖物的机械技术领域,特别涉及一种外墙清洗装置及外墙清洗机器人。
背景技术
现有的外墙清洗技术领域,一般采用人工吊篮、蜘蛛人进行清洗作业,这种清洗方式由于需要人在高空上下、左右移动,安全性不高,效率低下,在雨天及夜晚无法作业。
专利号为ZL 200320114203.0的实用新型专利公开了一种外墙清洗装置,可一定程度上解决上述问题。如图1所示的墙壁清洗机,清扫刷套装在清扫刷的空心轴上,清扫刷空心轴成活动配合套装在推力风扇1支架上,推力风扇1的支架上通过清扫刷空心轴安装1个或1个以上的清扫刷,清扫刷的空心轴通过皮带与安装在推力风扇1上的清扫刷电机4相接,一端与推力风扇1支架相接的吊绳14绕过套装在悬吊支架8的滑轮与安装在移动小车13上的卷扬装置9相接。此种外墙清洗机,可通过卷扬装置、移动小车使清扫刷上下、左右移动,也可通过推力风扇产生的力使清扫刷相对于墙壁移动,并使清洗刷贴向墙壁,从而完成对高层建筑物外墙的清扫工作,能够达到较好的清洗效果。
但是,该种墙壁清洗机不能随时调节清洗装置与外墙工作面之间的距离,以至于清洗刷不能很好地接触外墙工作面,从而造成清洗刷空转、外墙工作面漏洗或擦洗力度不够等问题,从而使墙面尤其是表面不平整的墙面不能得到全面、洁净的清洗,工作效率低。
实用新型内容
本实用新型要解决的问题是提供一种外墙清洗装置能够随时调节清洗装置与外墙工作面之间的距离,可使外墙尤其是表面不平整的外墙得到全面、洁净的清洗,提高了工作效率。在此基础上,本实用新型还提供一种外墙清洗机器人。
本实用新型提供一种外墙清洗装置,包括机架及安装在机架上的清洗器,还包括清洗距离调节装置,所述清洗距离调节装置包括:
测量单元,用于检测并输出清洗装置与外墙工作面之间的距离信号;
控制单元,用于根据所述距离信号输出驱动信号;当清洗装置与外墙工作面的距离大于预设清洗距离时,输出正向驱动信号,以便缩小清洗装置与外墙工作面之间的距离;当清洗装置与外墙工作面的距离小于预设清洗距离时,输出反向驱动信号,以便增大清洗装置与外墙工作面之间的距离;
驱动机构,用于根据所述驱动信号的极性推动机架作相应方向运动。
优选地,所述测量单元为超声波测距仪、红外测距仪或者光电测距仪之一。
优选地,所述驱动机构包括:
步进电机,根据所述驱动信号转动特定角度;
直线运动执行机构,用于将步进电机的圆周运动转化为机架的直线运动。
优选地,所述直线运动执行机构为蜗轮蜗杆机构、齿轮齿条机构、螺旋机构、曲柄滑块机构或曲柄连杆机构之一。
优选地,所述驱动机构为油缸、气缸或电动推杆之一。
本实用新型还提供一种外墙清洗机器人,所述外墙清洗机器人包含所述外墙清洗装置,使所述清洗装置运动的移动装置,使所述外墙清洗装置与外墙工作面贴合的施压装置。
优选地,所述施压装置为装在机架工作面相向一侧的推力风扇。
优选地,所述移动装置包括:
通过钢丝绳与所述外墙清洗装置连接的卷扬装置;
安装所述卷扬装置的移动小车。
优选地,还包括:
运动控制系统,用于控制所述卷扬装置及移动小车的运动;
遥控器,用于向所述运动控制系统发出控制信号。
优选地,还包括:
灯光系统,用于全天候作业;
监控系统,用于监控所述机器人作业情况;所述监控系统包括录像单元,用于录制机器人作业情况及外墙状况,检查外墙缺陷。
与现有的墙壁清洗机相比,本实用新型具有以下优点:
本实用新型由于设有清洗距离调节装置,可以随时调节清洗装置与外墙工作面之间的距离,从而避免清洗刷不能很好接触外墙工作面而造成的空转、漏洗或擦洗力度不够,从而使外墙尤其是表面不平整的外墙得到全面、洁净的清洗,提高了工作效率。
附图说明
图1是现有外墙清洗机的结构示意图;
图2是基于本实用新型外墙清洗装置的结构示意图;
图3是基于本实用新型外墙清洗装置第一实施例示意图;
图4是基于本实用新型外墙清洗装置第二实施例示意图。
具体实施方式
为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。
参见图2及图3,对本实用新型外墙清洗装置第一实施例进行说明。
本实用新型的外墙清洗装置包括机架6及固定在机架6上的清洗器2,还包括清洗距离调节装置3,其中:
清洗距离调节装置如图3所示,包括测量单元31、控制单元32、驱动机构33。其中测量单元用于测量并输出清洗装置与外墙工作面的距离信号,本实施的测量单元为超声波测距仪,也可以用红外测距仪或者光电测距仪代替;控制单元,用于根据距离信号输出驱动信号;驱动机构,用于根据驱动信号推动机架运动,包括步进电机331及蜗轮蜗杆机构332,作为另一种实施方式,此蜗轮蜗杆机构也可由齿轮齿条机构、螺旋机构、曲柄滑块机构或曲柄连杆机构代替。
在清洗距离调节装置工作时,测量单元先进行距离检测,当检测得到清洗装置与外墙工作面的距离大于预设清洗距离时,输出正向驱动信号,步进电机转动,通过蜗轮蜗杆机构带动机架6作直线运动,使清洗装置与外墙工作面之间的距离达到预设距离;当清洗装置与外墙工作面的距离小于预设清洗距离时,输出反向驱动信号,步进电机转动,通过蜗轮蜗杆机构带动机架6作直线运动,使清洗装置与外墙工作面之间的距离达到预设距离。
本实用新型实施例所述外墙清洗装置工作时,超声波测距仪测量并输出清洗装置与外墙工作面的距离信号,控制单元根据距离信号输出相应极性的驱动信号,驱动步进电机转动,通过蜗轮蜗杆机构带动机架作相应方向的直线运动,使清洗装置与外墙工作面之间的距离稳定在预设距离,再进行对外墙工作面的清洁作业。
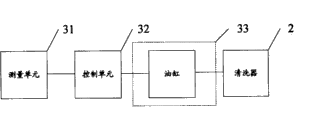
参见图2及图4,对本实用新型外墙清洗装置第二实施例进行说明。
如图4所示,本实施例中,驱动机构为油缸,该油缸还包括控制液压油方向及流量的控制阀,也可选用气缸或电动推杆之一作为另外的实施方式;控制单元输出的驱动信号直接控制油缸动作,使机架作相应方向的直线运动,将清洗装置与外墙工作面之间的距离稳定在预设距离;其余部分均与实施例一相同,此处不再赘述。
在此基础上,本实用新型的外墙清洗机器人,包含外墙清洗装置以及使外墙清洗装置运动的移动装置、使外墙清洗装置与外墙工作面贴合的施压装置。其中,移动装置如图1所示,此处不再赘述。
施压装置可采取多种形式实现:如图1所示的推力风扇1,通过产生持续的风,使外墙清洗装置贴住外墙工作面;或者,采用吸盘及附件(如油缸、气缸、电动推杆等)构成,通过附件的作用,使吸盘贴紧或脱离外墙工作面;也可以采用电磁压力器实现,通过调整其控制电压,可改变施压装置所产生作用力的方向。
此外,为了能够实现全天候作业以及自动化操作的效果,本实用新型的外墙清洗机器人还包括:灯光系统、监控系统、运动控制系统、遥控器,其中监控系统还设有录像单元,用于录制机器人作业情况及外墙状况,从而检查外墙裂纹、破损等缺陷,为工程验收提供有力依据。本外墙清洗机器人不仅能够全天候遥控作业,且安全性好、效率高,并能检查外墙缺陷。
以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制。依据本实用新型的技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均属于本实用新型技术方案保护的范围内。
Claims (10)
1.一种外墙清洗装置,包括机架及安装在机架上的清洗器,其特征在于,还包括清洗距离调节装置,所述清洗距离调节装置包括:
测量单元,用于检测并输出清洗装置与外墙工作面之间的距离信号;
控制单元,用于根据所述距离信号输出驱动信号;当清洗装置与外墙工作面的距离大于预设清洗距离时,输出正向驱动信号,以便缩小清洗装置与外墙工作面之间的距离;当清洗装置与外墙工作面的距离小于预设清洗距离时,输出反向驱动信号,以便增大清洗装置与外墙工作面之间的距离;
驱动机构,用于根据所述驱动信号的极性推动机架作相应方向运动。
2.根据权利要求1所述的装置,其特征在于,所述测量单元为超声波测距仪、红外测距仪或者光电测距仪之一。
3.根据权利要求1所述的装置,其特征在于,所述驱动机构包括:
步进电机,根据所述驱动信号转动特定角度;
直线运动执行机构,用于将步进电机的圆周运动转化为机架的直线运动。
4.根据权利要求3所述的装置,其特征在于,所述直线运动执行机构为蜗轮蜗杆机构、齿轮齿条机构、螺旋机构、曲柄滑块机构或曲柄连杆机构之一。
5.根据权利要求1所述的装置,其特征在于,所述驱动机构为油缸、气缸或电动推杆之一。
6.一种外墙清洗机器人,其特征在于,包括权利要求1-5任一项所述的外墙清洗装置、使所述清洗装置运动的移动装置、使所述外墙清洗装置与外墙工作面贴合的施压装置。
7.根据权利要求6所述的机器人,其特征在于,所述施压装置为装在机架工作面相向一侧的推力风扇。
8.根据权利要求6所述的机器人,其特征在于,所述移动装置包括:
通过钢丝绳与所述外墙清洗装置连接的卷扬装置;
安装所述卷扬装置的移动小车。
9.根据权利要求8所述的机器人,其特征在于,还包括:
运动控制系统,用于控制所述卷扬装置及移动小车的运动;
遥控器,用于向所述运动控制系统发出控制信号。
10.根据权利要求6所述的机器人,其特征在于,还包括:
灯光系统,用于全天候作业;
监控系统,用于监控所述机器人作业情况;所述监控系统包括录像单元,用于录制机器人作业情况及外墙状况,检查外墙缺陷。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2009200027935U CN201441335U (zh) | 2009-03-13 | 2009-03-13 | 一种外墙清洗装置及外墙清洗机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2009200027935U CN201441335U (zh) | 2009-03-13 | 2009-03-13 | 一种外墙清洗装置及外墙清洗机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN201441335U true CN201441335U (zh) | 2010-04-28 |
Family
ID=42546007
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2009200027935U Expired - Fee Related CN201441335U (zh) | 2009-03-13 | 2009-03-13 | 一种外墙清洗装置及外墙清洗机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN201441335U (zh) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102193558A (zh) * | 2011-03-04 | 2011-09-21 | 北京交通大学 | 可缩放的基于风滚草仿生的被动驱动型探测机器人 |
| CN102242568A (zh) * | 2010-05-13 | 2011-11-16 | 程大祥 | 远控高空清洗装饰升降机 |
| CN102406489A (zh) * | 2011-11-23 | 2012-04-11 | 博宇(无锡)科技有限公司 | 幕墙检查清洗系统 |
| CN102835936A (zh) * | 2012-09-21 | 2012-12-26 | 苏州工业园区职业技术学院 | 墙面清洗机器人控制系统 |
| CN103251357A (zh) * | 2013-04-18 | 2013-08-21 | 三一汽车起重机械有限公司 | 外墙清洗机 |
| CN103824443A (zh) * | 2014-03-18 | 2014-05-28 | 四川邮科通信技术有限公司 | 一种基于stc89c52rc单片机的红外遥控节能型洗窗装置 |
| CN106175616A (zh) * | 2016-08-31 | 2016-12-07 | 安徽省炜思煜智能科技有限公司 | 一种墙面自动清洗系统 |
| CN106214052A (zh) * | 2016-07-28 | 2016-12-14 | 河北工程大学 | 幕墙清洗天车控制系统 |
| CN107617616A (zh) * | 2016-07-14 | 2018-01-23 | 北京天诚同创电气有限公司 | 清洁装置及光伏阵列 |
| CN109363569A (zh) * | 2018-12-17 | 2019-02-22 | 深圳截明电子科技有限公司 | 墙面自动清洗装置 |
| CN109788883A (zh) * | 2017-04-20 | 2019-05-21 | 法提赫·埃姆雷姆 | 窗户清洁机器人 |
| CN111227729A (zh) * | 2020-04-08 | 2020-06-05 | 福州市闽侯县扬贤工艺品有限公司 | 一种具有天花板清洁功能的装饰灯 |
-
2009
- 2009-03-13 CN CN2009200027935U patent/CN201441335U/zh not_active Expired - Fee Related
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102242568A (zh) * | 2010-05-13 | 2011-11-16 | 程大祥 | 远控高空清洗装饰升降机 |
| CN102193558A (zh) * | 2011-03-04 | 2011-09-21 | 北京交通大学 | 可缩放的基于风滚草仿生的被动驱动型探测机器人 |
| CN102406489A (zh) * | 2011-11-23 | 2012-04-11 | 博宇(无锡)科技有限公司 | 幕墙检查清洗系统 |
| CN102835936A (zh) * | 2012-09-21 | 2012-12-26 | 苏州工业园区职业技术学院 | 墙面清洗机器人控制系统 |
| CN103251357B (zh) * | 2013-04-18 | 2016-04-06 | 三一汽车起重机械有限公司 | 外墙清洗机 |
| CN103251357A (zh) * | 2013-04-18 | 2013-08-21 | 三一汽车起重机械有限公司 | 外墙清洗机 |
| CN103824443A (zh) * | 2014-03-18 | 2014-05-28 | 四川邮科通信技术有限公司 | 一种基于stc89c52rc单片机的红外遥控节能型洗窗装置 |
| CN107617616A (zh) * | 2016-07-14 | 2018-01-23 | 北京天诚同创电气有限公司 | 清洁装置及光伏阵列 |
| CN106214052A (zh) * | 2016-07-28 | 2016-12-14 | 河北工程大学 | 幕墙清洗天车控制系统 |
| CN106214052B (zh) * | 2016-07-28 | 2018-11-16 | 河北工程大学 | 幕墙清洗天车控制系统 |
| CN106175616A (zh) * | 2016-08-31 | 2016-12-07 | 安徽省炜思煜智能科技有限公司 | 一种墙面自动清洗系统 |
| CN109788883A (zh) * | 2017-04-20 | 2019-05-21 | 法提赫·埃姆雷姆 | 窗户清洁机器人 |
| CN109363569A (zh) * | 2018-12-17 | 2019-02-22 | 深圳截明电子科技有限公司 | 墙面自动清洗装置 |
| CN111227729A (zh) * | 2020-04-08 | 2020-06-05 | 福州市闽侯县扬贤工艺品有限公司 | 一种具有天花板清洁功能的装饰灯 |
| CN111227729B (zh) * | 2020-04-08 | 2021-05-14 | 南京泰瑞新材料科技有限公司 | 一种具有天花板清洁功能的装饰灯 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN201441335U (zh) | 一种外墙清洗装置及外墙清洗机器人 | |
| CN201431424Y (zh) | 高层外墙面清洁装置 | |
| CN204810221U (zh) | 太阳能电池板自动清洁系统 | |
| CN206578054U (zh) | 新型光伏电池板自动清洗装置 | |
| CN201887058U (zh) | 智能太阳能电池板灰尘清除装置 | |
| CN105125144B (zh) | 基于物联网的清洁机 | |
| CN107396837A (zh) | 一种养猪用自动清洗排污房 | |
| CN202426456U (zh) | 高层建筑外墙清洗设备 | |
| CN209341283U (zh) | 一种烟囱用具有滚动结构的清理维护装置 | |
| CN109330507A (zh) | 一种幕墙清洗机器人 | |
| CN201441336U (zh) | 一种外墙清洗装置及外墙清洗机器人 | |
| CN201664026U (zh) | 一种楼梯扶手自动清洗装置 | |
| CN102126689A (zh) | 风力发电机塔筒自动爬升机 | |
| CN108212893B (zh) | 一种智能控制带有清洗功能的太阳能电池固定架装置 | |
| CN207288118U (zh) | 一种光伏板用清洁设备 | |
| CN105365787B (zh) | 一种自动洗车机及其控制方法 | |
| CN209174456U (zh) | 一种用于水上光伏板的清洁装置 | |
| CN204443246U (zh) | 一种草坪垃圾回收机 | |
| CN203245886U (zh) | 一种二维悬挂式高楼外墙清洁机器人 | |
| CN205847189U (zh) | 太阳能电池板清洗机器人及其智能控制系统 | |
| CN205225036U (zh) | 一种多功能树脂窗户 | |
| CN201913084U (zh) | 水质在线监测设备表面机械清洗装置 | |
| CN103565346A (zh) | 一种多功能清洁器 | |
| CN205413725U (zh) | 一种智能化生产的汽车配件清洗系统 | |
| CN202960363U (zh) | 一种多功能清洁器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20100428 Termination date: 20110313 |