CN1840381A - 电动电磁混合悬浮系统 - Google Patents
电动电磁混合悬浮系统 Download PDFInfo
- Publication number
- CN1840381A CN1840381A CN 200510032182 CN200510032182A CN1840381A CN 1840381 A CN1840381 A CN 1840381A CN 200510032182 CN200510032182 CN 200510032182 CN 200510032182 A CN200510032182 A CN 200510032182A CN 1840381 A CN1840381 A CN 1840381A
- Authority
- CN
- China
- Prior art keywords
- suspension
- track
- ems
- magnet
- magnetic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Landscapes
- Control Of Vehicles With Linear Motors And Vehicles That Are Magnetically Levitated (AREA)
Abstract
本发明公开了一种电动电磁混合悬浮系统,目的是解决悬浮系统要么造价高、系统复杂,要么稳定性差的问题。技术方案是它由永磁EDS和电磁EMS混合而成,永磁EDS部分和电磁EMS部分通过连接件连接,它们均安装在位于磁浮列车下面的悬浮机构以及轨道上;永磁EDS部分为整个悬浮系统提供主要悬浮力;电磁EMS部分既为系统提供少部分悬浮力,又为永磁EDS部分提供竖直方向的阻尼力,增强系统的抗干扰能力,使得整个系统稳定悬浮。本发明综合了现有EMS型和EDS型磁浮系统的优点,克服了EMS型和EDS型系统各自的不足,降低了现有磁浮列车悬浮系统的复杂度,可降低列车以及轨道的造价。
Description
技术领域
本发明涉及一种磁浮列车悬浮系统,尤其是一种电动悬浮和电磁悬浮混合的悬浮系统。
背景技术
磁浮列车是依靠磁铁吸力或斥力使得列车与轨道脱离,并利用直线电机驱动列车沿轨道运行的新型交通工具。磁浮列车与地面轨道间没有机械接触,具有节能、环保、快捷、舒适等优点,具有广阔的发展前景。按照悬浮原理来分,磁浮列车的悬浮系统有电动悬浮型(EDS型)、电磁悬浮型(EMS型)以及永磁吸引或排斥型等多种。
EDS型磁浮系统利用磁场和导电体之间的相对运动所产生的排斥力来实现悬浮。一种典型的EDS型系统是,在轨道上安装多相绕组产生移动磁场,车体底部充当导电体。当磁场的移动速度和车速不同时,导电体和磁场之间就发生了相对运动,从而产生实现悬浮的排斥力。另一种常用的EDS型系统是在车体上安装高安匝数的电磁线圈,并使之相对于导电体轨道运动,由此产生的排斥力起支撑车体的作用。后一种系统往往采用超导线圈来产生强大的磁场,如日本的Express系统和美国的Maglev2000系统,现在已经有采用永久磁铁代替电磁线圈的方案,如美国的GA和Magplane方案。在EDS型系统中,悬浮力的大小与导电体和磁场之间的相对运动速度有关,速度较高时悬浮力较大。在启动和着陆的过程中,由于速度较慢,悬浮力不足以支撑车体,因而必须采用支撑轮辅助支撑。
EMS型磁浮系统利用安装在磁浮列车上的电磁铁与导磁轨道之间的吸引力来实现悬浮,以德国Transrapid和日本HSST磁浮列车为代表。这类系统的悬浮力在间隙增大时减小,间隙减小时增大,必须施加主动控制才能保证间隙稳定。此外,为了保证电磁铁功耗不致太大,系统要求采用较小的悬浮间隙,通常为10毫米左右。
EDS型磁浮系统悬浮间隙较大,对轨道精度的要求相应较低,加之它是一种自稳的悬浮方案,无需悬浮传感器和悬浮控制器等设备,若采用永磁铁,那么也不需要超导的冷却系统,整个系统造价比较低,但是EDS型系统抑制干扰的能力较差,列车与轨道之间易发生耦合振动。现有的EDS型磁浮系统在稳定方面采取了很多措施,但尚不能令人满意。EMS型磁浮系统由于其悬浮间隙小,对轨道精度要求较高,并且为了保持稳定悬浮,需要悬浮传感器和悬浮控制器等设备,加之为了确保系统稳定可靠,一般使用冗余设计方法,导致整个系统造价比较高。设备重量增加后,整个列车的承重比就比较小。因此如何设计抗干扰能力强、稳定性好、造价相对较低、承重效率高的磁浮系统成为人们关注的重要问题。
发明内容
本发明要解决的技术问题是既克服EMS型磁浮系统造价高和系统复杂的缺点,又解决EDS型磁浮系统的稳定性问题。
本发明的技术方案是提出一种永磁EDS和电磁EMS混合的磁浮列车悬浮系统,永磁EDS部分为整个悬浮系统提供主要悬浮力;电磁EMS部分一方面为系统提供少部分悬浮力,一方面通过施加主动控制为永磁EDS部分提供竖直方向的阻尼力,增强系统的抗干扰能力,使得整个系统稳定悬浮。
本发明的永磁EDS部分和电磁EMS部分通过连接件连接,它们均安装在位于磁浮列车下面的悬浮机构以及轨道上。
永磁EDS部分,由永磁阵列与感应体组合而成,永磁阵列安装在位于车体下面的悬浮机构上,并与嵌在轨道上表面的感应体正对。永磁阵列采用Halbach排列结构。在Halbach排列结构中所有的永磁体都提供有效磁势,可以提供较强的磁场。感应体通常为非导磁性金属板或金属导轨,比如铝、铜。永磁阵列到感应体之间的距离定义为悬浮间隙δ。
电磁EMS部分位于轨道下面,由电磁铁、悬浮传感器、悬浮控制器、磁铁电流驱动器以及倒U型轨道铁芯构成。电磁铁由U型铁芯和电磁线圈组成。电磁线圈缠绕在U型铁芯上,U型铁芯通过连接件固定在悬浮机构上,并与安装在轨道下面的倒U型轨道铁芯正对。悬浮传感器根据实际情况选定安装位置,关键在于能够检测出电磁铁和轨道之间的间隙,即U型铁芯的上表面与倒U型轨道铁芯的下表面之间的气隙δ′。由于悬浮机构、轨道上面的部件都是刚体连接,所以δ′直接反映δ的大小,且二者之和是定值。
电磁EMS部分各部件之间的电气连接为,悬浮传感器与悬浮控制器输入端相连,悬浮控制器输出端连接磁铁电流驱动器输入端,磁铁电流驱动器的输出接电磁线圈。悬浮传感器将测得的间隙信号传送给悬浮控制器;悬浮控制器按照阻止电磁铁和轨道发生相对运动的要求,输出电压调整指令给磁铁电流驱动器;磁铁电流驱动器给电磁铁线圈提供电流。通过施加这种主动控制,电磁EMS部分可以给列车的运动提供竖直方向的阻尼力。
本发明由永磁EDS部分产生悬浮斥力:当永磁阵列以速度v相对感应体运动时,在感应体回路中将产生感应电流,并且感应体与永磁阵列之间会产生力的作用。此力沿垂直轨道方向分量记为Fz,且表现为排斥作用,即磁浮列车受到感应体对其向上的悬浮斥力。平均悬浮斥
力的表达式为:
其中A,b,k为常数,与永磁阵列和感应体的材料、结构相关。从上式可以看出,速度v越大浮力越大。
本发明由电磁EMS部分产生电磁引力Ff:电磁铁对倒U型轨道铁芯的引力Ff为:
其中μ0为真空磁导率,N为电磁线圈的匝数,S为电磁铁磁极面积;电磁引力Ff与电流I0的平方成正比关系,与气隙δ′是成非线性的平方反比关系。
本发明的工作原理是:
磁浮列车在运行过程中分别受到支撑轮支持力Ft、永磁EDS部分的悬浮斥力Fz、电磁EMS部分的悬浮引力Ff、重力G的作用。磁浮列车静止时,悬浮斥力Fz为零,悬浮引力Ff不足以克服磁浮列车重力G,此时,主要由支撑轮提供支撑力。随着速度的增加,悬浮斥力也增加,但它与电磁引力的合力还不能克服磁浮列车的重力时,磁浮列车依然与轨道接触。当磁浮列车移动速度v=vp时(vp为临界悬浮速度),Fz+Ff=G,处于临界悬浮状态。当vt>vp时,Fz进一步增大,于是有,Fz+Ff>G,磁浮列车与轨道脱离,悬浮间隙δ增大。随着δ的增大,悬浮斥力Fz将减小。通过这种速度增大导致悬浮力增大、悬浮力增大导致悬浮间隙增大、悬浮间隙增大又导致悬浮力减小的自动调节作用,保持Fz+Ff=G,是一种自稳的过程。实际上由于轨道不平和空气流动等扰动的存在,悬浮间隙的大小将会在稳定值δ0附近振荡,这种振荡产生噪声,并对乘坐舒适性产生较大影响。为此本发明的EMS部分的悬浮控制器根据间隙变化的动态过程相应调整电磁铁的电磁引力的大小,以减小间隙的振荡。
为降低系统电功率消耗,本发明可采用电磁永磁混合型EMS悬浮,即在电磁EMS部分的电磁铁中加入永磁铁,由永磁铁提供额外的静态EMS型悬浮力,而电磁铁的电流可以正负变化,其平均值为零。永磁铁加入到电磁铁的方式有三种:一种是使用两块永磁铁分别安装在U型铁芯的两个极面上,使得永磁铁的在U型铁芯内部产生的磁路方向相同;另一种是使用一块永磁铁,安装在U型铁芯的中部;第三种就是前面两种方式的复合,既使用两块永磁铁分别安装在U型铁芯的两个极面上,使得永磁铁的在U型铁芯内部产生的磁路方向相同,又使用另一块永磁铁,安装在U型铁芯的中部。电磁永磁混合EMS型悬浮可以降低系统的电能消耗,稳定悬浮时可以使得系统电功率的消耗趋近于零。
采用本发明可以达到以下技术效果:
1.本发明综合了现有EMS型和EDS型磁浮系统的优点,克服了EMS型和EDS型系统各自的不足,降低了现有磁浮列车悬浮系统的复杂度,可降低列车以及轨道的造价。特别是本发明的EMS部分不是用于提供主要的悬浮力,因此电磁铁和悬浮控制器等装置都可以做得很小,而且不必通过它们的冗余设计来保证系统的安全,因此可以大大简化系统。
2.本发明既利用EDS型系统悬浮间隙大对轨道精度要求低的特点,又利用EMS型系统施加主动控制为永磁EDS部分提供竖直方向的阻尼力,使得磁浮列车运行平稳,提高乘坐舒适性。
3.采用电磁永磁混合EMS悬浮可以实现零功率悬浮,功耗大大降低。
4.当电磁EMS部分出现故障时本发明仍然能够依靠永磁EDS部分实现悬浮,系统可靠性相比单纯EMS型或者EDS型极大增强。
附图说明
图1是磁浮列车与轨道示意图;
图2是本发明磁浮系统结构图;
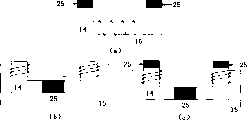
图3是本发明采用电磁永磁混合EMS悬浮时三种永磁铁的安装结构。
具体实施方式:
图1是磁浮列车与轨道示意图。磁浮列车由车厢1、悬浮机构2以及必要的连接件组成。轨道3呈T型结构。悬浮机构2从两侧环抱轨道3。非悬浮状态时,悬浮机构2与轨道3接触,磁浮列车靠机械力支撑于轨道3上;悬浮状态时,悬浮机构2可以与轨道3脱离,磁浮列车沿轨道无摩擦行进。
图2是本发明悬浮系统的一侧的纵向剖视图,另外一侧与其对称。车厢1通过阻尼装置10与悬浮机构2连接。悬浮机构2上装有永磁阵列12、支撑轮13、U型铁芯14、电磁线圈15、悬浮传感器16,这些部件均由连接件11固定。轨道3上装有感应体17和倒U型轨道铁芯18。U型铁芯14和电磁线圈15组成电磁铁。图中,悬浮控制器20以及磁铁电流驱动器21尽管画在电磁铁的下面,实际上是安装在磁浮列车上的,通过电缆22与电磁线圈15和悬浮传感器16连接。感应体17为非铁磁性金属材料,嵌在轨道3上表面内,与安装在悬浮机构2底部的永磁阵列12正对。永磁阵列12采用Halbach排列结构。支撑轮13排列在永磁阵列12两侧,当磁浮列车处于非悬浮状态时起支撑车体作用。电磁铁装在悬浮机构2的最底部,从悬浮机构2两侧伸进轨道3下面,并且电磁铁U型铁芯14的两个极面与倒U型轨道铁芯18的下表面两极正对。悬浮传感器16根据实际情况选定安装位置,图中给出一种安装示例:安装在电磁铁旁且靠近轨道3竖梁一侧,与安装在倒U型轨道铁芯18旁的参考挡板19正对。永磁阵列到感应体之间的距离为悬浮间隙δ,U型铁芯的上表面与倒U型轨道铁芯的下表面之间的气隙为δ′。
永磁阵列12与感应体17即为本发明的永磁EDS部分;电磁铁、悬浮传感器16、悬浮控制器20、磁铁电流驱动器21以及倒U型轨道铁芯18构成本发明系统的电磁EMS部分。
电磁EMS部分各部件之间的电气连接为,悬浮传感器16与悬浮控制器20输入端相连,悬浮控制器20输出端连接磁铁电流驱动器21输入端,磁铁电流驱动器21的输出接电磁线圈15。悬浮传感器16将测得的间隙信号传送给悬浮控制器20;悬浮控制器20按照阻止电磁铁和轨道发生相对运动的要求,输出电压调整指令给磁铁电流驱动器21;磁铁电流驱动器21按照悬浮控制器20的电压调整指令调整电磁线圈15内的电流大小和方向,从而改变电磁铁与倒U型轨道铁芯18之间的电磁引力的大小。
图3为常见的三种永磁铁安装结构图。图3(a)中永磁铁25分别安装在U型铁芯14的两个极面上,磁极方向相反,使得两个磁铁在U型铁芯中的磁路同向;图3(b)中永磁铁25安装在U型铁芯14的中部。图3(c)是前面两种方式的复合,既使用两块永磁铁分别安装在U型铁芯的两个极面上,又使用另一块永磁铁安装在U型铁芯的中部。
Claims (5)
1.一种电动电磁混合悬浮系统,其特征在于它由永磁EDS即永磁电动悬浮系统和电磁EMS即电磁悬浮系统混合而成,永磁EDS部分和电磁EMS部分通过连接件连接,它们均安装在位于磁浮列车下面的悬浮机构以及轨道上;永磁EDS部分为整个悬浮系统提供主要悬浮力;电磁EMS部分一方面为系统提供少部分悬浮力,一方面通过施加主动控制为永磁EDS部分提供竖直方向的阻尼力,增强系统的抗干扰能力,使得整个系统稳定悬浮。
2.如权利要求1所述的电动电磁混合悬浮系统,其特征在于所述永磁EDS部分由永磁阵列与感应体组合而成,永磁阵列安装在位于车体下面的悬浮机构上,并与嵌在轨道上表面的感应体正对;永磁阵列采用Halbach排列结构;感应体通常为非导磁性金属板或金属导轨;永磁阵列到感应体之间的距离定义为悬浮间隙δ。
3.如权利要求1所述的电动电磁混合悬浮系统,其特征在于所述电磁EMS部分位于轨道下面,由电磁铁、悬浮传感器、悬浮控制器、磁铁电流驱动器以及倒U型轨道铁芯构成;电磁铁由U型铁芯和电磁线圈组成;电磁线圈缠绕在U型铁芯上,U型铁芯通过连接件固定在悬浮机构上,并与安装在轨道下面的倒U型轨道铁芯正对;悬浮传感器根据实际情况选定安装位置,关键在于能够检测出电磁铁和轨道之间的间隙,即U型铁芯的上表面与倒U型轨道铁芯的下表面之间的气隙δ′;悬浮机构、轨道上面的部件都是刚体连接,δ′直接反映δ的大小,且二者之和是定值;电磁EMS部分各部件之间的电气连接为,悬浮传感器与悬浮控制器输入端相连,悬浮控制器输出端连接磁铁电流驱动器输入端,磁铁电流驱动器的输出接电磁线圈;悬浮传感器将测得的间隙信号传送给悬浮控制器;悬浮控制器按照阻止电磁铁和轨道发生相对运动的要求,输出电压调整指令给磁铁电流驱动器;磁铁电流驱动器给电磁铁线圈提供电流;通过这种作用,电磁EMS部分可以给列车的运动提供竖直方向的阻尼力。
4.权利要求1所述的电动电磁混合悬浮系统,其特征在于本发明的工作原理是:磁浮列车在运行过程中分别受到支撑轮支持力Ft、永磁EDS部分的悬浮斥力Fz、电磁EMS部分的悬浮引力Ff、重力G的作用;磁浮列车静止时,悬浮斥力Fz为零,悬浮引力Ff不足以克服磁浮列车重力G,此时,主要由支撑轮提供支撑力;随着速度的增加,悬浮斥力也增加,但它与电磁引力的合力还不能克服磁浮列车的重力时,磁浮列车依然与轨道接触;当磁浮列车移动速度v=vp时,vp为临界悬浮速度,Fz+Ff=G,处于临界悬浮状态;当vt>vp时,Fz进一步增大,于是有,Fz+Ff>G,磁浮列车与轨道脱离,悬浮间隙δ增大;随着δ的增大,悬浮斥力Fz将减小;通过这种速度增大导致悬浮力增大、悬浮力增大导致悬浮间隙增大、悬浮间隙增大又导致悬浮力减小的自动调节作用,保持Fz+Ff=G,是一种自稳的过程;实际上由于轨道不平和空气流动等扰动的存在,悬浮间隙的大小将会在稳定值δ0附近振荡,这种振荡产生噪声,并对乘坐舒适性产生较大影响;为此本发明的EMS部分的悬浮控制器根据间隙变化的动态过程相应调整电磁铁的电磁引力的大小,以减小间隙的振荡。
5.如权利要求1所述的电动电磁混合悬浮系统,其特征在于为降低系统电功率消耗,本发明可采用电磁永磁混合型EMS悬浮,即在电磁EMS部分的电磁铁中加入永磁铁,由永磁铁提供额外的静态EMS型悬浮力,而电磁铁的电流可以正负变化,其平均值为零;永磁铁加入到电磁铁的方式有三种:一种是使用两块永磁铁分别安装在U型铁芯的两个极面上,使得永磁铁的在U型铁芯内部产生的磁路方向相同;另一种是使用一块永磁铁,安装在U型铁芯的中部;第三种就是前面两种方式的复合,既使用两块永磁铁分别安装在U型铁芯的两个极面上,使得永磁铁的在U型铁芯内部产生的磁路方向相同,又使用另一块永磁铁,安装在U型铁芯的中部。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CNB2005100321821A CN100427334C (zh) | 2005-09-23 | 2005-09-23 | 电动电磁混合悬浮系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CNB2005100321821A CN100427334C (zh) | 2005-09-23 | 2005-09-23 | 电动电磁混合悬浮系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1840381A true CN1840381A (zh) | 2006-10-04 |
| CN100427334C CN100427334C (zh) | 2008-10-22 |
Family
ID=37029644
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB2005100321821A Expired - Fee Related CN100427334C (zh) | 2005-09-23 | 2005-09-23 | 电动电磁混合悬浮系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN100427334C (zh) |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101565002B (zh) * | 2008-04-24 | 2011-03-16 | 上海轨道交通设备发展有限公司 | 一种常导吸力型磁浮车的悬浮和导向系统 |
| CN102092306A (zh) * | 2011-01-19 | 2011-06-15 | 中国人民解放军国防科学技术大学 | 用于磁悬浮列车的防吸死装置 |
| CN102522925A (zh) * | 2011-11-18 | 2012-06-27 | 北京交通大学 | 高温超导旋转磁场电动式磁悬浮系统 |
| CN102653247A (zh) * | 2011-03-04 | 2012-09-05 | 吴小平 | 调翼式永磁悬浮技术 |
| CN102897054A (zh) * | 2012-09-28 | 2013-01-30 | 清水控股有限公司 | 磁推进的、居中的和悬浮的运输系统 |
| CN103063441A (zh) * | 2012-12-21 | 2013-04-24 | 李萍 | 用于汽车仪表的eds检测系统 |
| CN103318048A (zh) * | 2013-05-29 | 2013-09-25 | 西南交通大学 | 一种用于磁浮列车的串联型永磁混合悬浮装置 |
| CN104049103A (zh) * | 2014-07-07 | 2014-09-17 | 南车株洲电力机车有限公司 | 一种磁浮列车运行速度的测量方法和装置 |
| CN105157387A (zh) * | 2015-09-29 | 2015-12-16 | 深圳市信宇人科技有限公司 | 具有磁悬浮输送功能的隧道式烘烤箱 |
| CN107968601A (zh) * | 2017-12-06 | 2018-04-27 | 中车青岛四方机车车辆股份有限公司 | 一种悬浮电磁铁及磁浮车辆 |
| CN108372864A (zh) * | 2018-01-22 | 2018-08-07 | 武汉理工大学 | 一种真空管道列车磁悬浮ems/eds混合支承结构 |
| CN108790934A (zh) * | 2018-04-04 | 2018-11-13 | 中国铁建重工集团有限公司 | 一种磁浮直线电机线圈调节装置及磁浮列车 |
| CN109278567A (zh) * | 2018-10-16 | 2019-01-29 | 中国人民解放军国防科技大学 | 永磁电磁混合型高速磁浮列车端部电磁铁的容错控制方法 |
| CN109677273A (zh) * | 2019-01-22 | 2019-04-26 | 西南交通大学 | 一种可静止起浮的超导电动悬浮列车的控制方法 |
| CN109811601A (zh) * | 2019-03-25 | 2019-05-28 | 成都市新筑路桥机械股份有限公司 | 一种带救援轨的中低速磁浮系统轨道梁 |
| CN110411276A (zh) * | 2018-04-27 | 2019-11-05 | 中国航天科工飞航技术研究院(中国航天海鹰机电技术研究院) | 一种基于磁悬浮电磁助推的运载火箭发射系统 |
| CN110406697A (zh) * | 2018-04-27 | 2019-11-05 | 中国航天科工飞航技术研究院(中国航天海鹰机电技术研究院) | 一种基于磁悬浮电磁助推的飞行器发射系统 |
| CN112895910A (zh) * | 2015-07-26 | 2021-06-04 | 大连奇想科技有限公司 | 高速磁浮列车的随车控制系统 |
| CN113060009A (zh) * | 2021-04-29 | 2021-07-02 | 福建师范大学 | 一种单轨高温超导磁悬浮列车 |
| CN113942398A (zh) * | 2021-11-24 | 2022-01-18 | 中国科学院电工研究所 | 一种单永磁阵列夹心式永磁电动悬浮导向一体化机构 |
| CN114920015A (zh) * | 2022-06-14 | 2022-08-19 | 江西理工大学 | 磁悬浮滑轨的导向结构 |
| CN117621844A (zh) * | 2024-01-25 | 2024-03-01 | 江西理工大学 | 牵引、悬浮、导向一体化的电磁悬浮装置及其优化方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4313846A1 (de) * | 1992-04-29 | 1993-11-25 | Grumman Aerospace Corp | Elektromagnetische Aufhängung unter Verwendung eines supraleitenden Magneten |
| CN1076677C (zh) * | 1999-12-24 | 2001-12-26 | 刘尚举 | 双向电磁铁控制永磁悬浮及导向装置 |
| CN1173846C (zh) * | 2001-09-28 | 2004-11-03 | 刘尚举 | 永磁感应悬浮与导向装置 |
| CN1317811C (zh) * | 2003-06-12 | 2007-05-23 | 国家磁浮交通工程技术研究中心 | 永磁和电磁混合励磁的长定子直线同步电机 |
-
2005
- 2005-09-23 CN CNB2005100321821A patent/CN100427334C/zh not_active Expired - Fee Related
Cited By (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101565002B (zh) * | 2008-04-24 | 2011-03-16 | 上海轨道交通设备发展有限公司 | 一种常导吸力型磁浮车的悬浮和导向系统 |
| CN102092306A (zh) * | 2011-01-19 | 2011-06-15 | 中国人民解放军国防科学技术大学 | 用于磁悬浮列车的防吸死装置 |
| CN102653247A (zh) * | 2011-03-04 | 2012-09-05 | 吴小平 | 调翼式永磁悬浮技术 |
| CN102522925A (zh) * | 2011-11-18 | 2012-06-27 | 北京交通大学 | 高温超导旋转磁场电动式磁悬浮系统 |
| CN102897054A (zh) * | 2012-09-28 | 2013-01-30 | 清水控股有限公司 | 磁推进的、居中的和悬浮的运输系统 |
| CN102897054B (zh) * | 2012-09-28 | 2016-06-01 | 清水控股有限公司 | 磁推进的、居中的和悬浮的运输系统 |
| CN103063441A (zh) * | 2012-12-21 | 2013-04-24 | 李萍 | 用于汽车仪表的eds检测系统 |
| CN103318048A (zh) * | 2013-05-29 | 2013-09-25 | 西南交通大学 | 一种用于磁浮列车的串联型永磁混合悬浮装置 |
| CN104049103A (zh) * | 2014-07-07 | 2014-09-17 | 南车株洲电力机车有限公司 | 一种磁浮列车运行速度的测量方法和装置 |
| CN112895910A (zh) * | 2015-07-26 | 2021-06-04 | 大连奇想科技有限公司 | 高速磁浮列车的随车控制系统 |
| CN112895910B (zh) * | 2015-07-26 | 2023-02-17 | 大连奇想科技有限公司 | 高速磁浮列车的随车控制系统 |
| CN105157387A (zh) * | 2015-09-29 | 2015-12-16 | 深圳市信宇人科技有限公司 | 具有磁悬浮输送功能的隧道式烘烤箱 |
| CN107968601A (zh) * | 2017-12-06 | 2018-04-27 | 中车青岛四方机车车辆股份有限公司 | 一种悬浮电磁铁及磁浮车辆 |
| CN108372864A (zh) * | 2018-01-22 | 2018-08-07 | 武汉理工大学 | 一种真空管道列车磁悬浮ems/eds混合支承结构 |
| CN108372864B (zh) * | 2018-01-22 | 2020-10-30 | 武汉理工大学 | 一种真空管道列车磁悬浮ems/eds混合支承结构 |
| CN108790934A (zh) * | 2018-04-04 | 2018-11-13 | 中国铁建重工集团有限公司 | 一种磁浮直线电机线圈调节装置及磁浮列车 |
| CN110411276A (zh) * | 2018-04-27 | 2019-11-05 | 中国航天科工飞航技术研究院(中国航天海鹰机电技术研究院) | 一种基于磁悬浮电磁助推的运载火箭发射系统 |
| CN110406697A (zh) * | 2018-04-27 | 2019-11-05 | 中国航天科工飞航技术研究院(中国航天海鹰机电技术研究院) | 一种基于磁悬浮电磁助推的飞行器发射系统 |
| CN109278567A (zh) * | 2018-10-16 | 2019-01-29 | 中国人民解放军国防科技大学 | 永磁电磁混合型高速磁浮列车端部电磁铁的容错控制方法 |
| CN109677273A (zh) * | 2019-01-22 | 2019-04-26 | 西南交通大学 | 一种可静止起浮的超导电动悬浮列车的控制方法 |
| CN109677273B (zh) * | 2019-01-22 | 2024-01-02 | 西南交通大学 | 一种可静止起浮的超导电动悬浮列车的控制方法 |
| CN109811601A (zh) * | 2019-03-25 | 2019-05-28 | 成都市新筑路桥机械股份有限公司 | 一种带救援轨的中低速磁浮系统轨道梁 |
| CN113060009A (zh) * | 2021-04-29 | 2021-07-02 | 福建师范大学 | 一种单轨高温超导磁悬浮列车 |
| CN113942398A (zh) * | 2021-11-24 | 2022-01-18 | 中国科学院电工研究所 | 一种单永磁阵列夹心式永磁电动悬浮导向一体化机构 |
| CN113942398B (zh) * | 2021-11-24 | 2024-02-02 | 中国科学院电工研究所 | 一种单永磁阵列夹心式永磁电动悬浮导向一体化机构 |
| CN114920015A (zh) * | 2022-06-14 | 2022-08-19 | 江西理工大学 | 磁悬浮滑轨的导向结构 |
| CN114920015B (zh) * | 2022-06-14 | 2024-03-01 | 江西理工大学 | 磁悬浮滑轨的导向结构 |
| CN117621844A (zh) * | 2024-01-25 | 2024-03-01 | 江西理工大学 | 牵引、悬浮、导向一体化的电磁悬浮装置及其优化方法 |
| CN117621844B (zh) * | 2024-01-25 | 2024-04-30 | 江西理工大学 | 牵引、悬浮、导向一体化的电磁悬浮装置及其优化方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN100427334C (zh) | 2008-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100427334C (zh) | 电动电磁混合悬浮系统 | |
| US6629503B2 (en) | Inductrack configuration | |
| KR101009465B1 (ko) | 할바흐 배열을 이용한 자기 부상 시스템 및 자기 부상 방법 | |
| CN111373097B (zh) | 采用无源低频电磁稳定化的永磁磁悬浮列车 | |
| CN109094422B (zh) | 悬挂式轨道交通设备以及其中的磁电混合悬浮轨系统 | |
| JPS6122521B2 (zh) | ||
| CN106926743A (zh) | 涡流阻尼器及磁悬浮车 | |
| EP0693999A1 (en) | Levitation and propulsion system using permanent magnets and interleaved iron or steel | |
| CN110315992B (zh) | 一种轨道交通系统 | |
| CN200977869Y (zh) | 磁悬浮斜行电梯 | |
| CN101875318B (zh) | 一种磁悬浮车 | |
| WO2015084370A1 (en) | Stator reduction in ropeless elevator transfer station | |
| CN111086396A (zh) | 一种基于Halbach结构的永磁电动型超高速运载装置 | |
| CN1076677C (zh) | 双向电磁铁控制永磁悬浮及导向装置 | |
| CN1321848C (zh) | 对地压力可调的高速轨道车辆 | |
| CN206841206U (zh) | 涡流阻尼器及磁悬浮车 | |
| CN114293415B (zh) | 提升车辆运行性能的永磁磁浮轨道系统及同步直线电机 | |
| CN210390797U (zh) | 一种用于悬挂式磁浮列车的层叠式电磁永磁混合悬浮系统 | |
| CN102910086A (zh) | 磁浮推动装置 | |
| US7626290B2 (en) | One-wheel and bi-pole magnetic driving apparatus | |
| CN110182060B (zh) | 一种用于悬挂式磁浮列车的层叠式电磁永磁混合悬浮系统 | |
| CN213359789U (zh) | 磁悬浮安全滑动门 | |
| CN210439077U (zh) | 一种基于倒e形悬浮轨的独轨制悬挂式电磁悬浮列车系统 | |
| CN110182058A (zh) | 一种基于倒u形悬浮轨的独轨制悬挂式磁悬浮列车系统 | |
| CN110194062A (zh) | 一种具有故障应急冗余配置的单轨悬挂式小型磁浮列车悬浮系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20081022 Termination date: 20091023 |