CN115837507A - 一种叉车门架型钢自动化切割装置 - Google Patents
一种叉车门架型钢自动化切割装置 Download PDFInfo
- Publication number
- CN115837507A CN115837507A CN202310158556.2A CN202310158556A CN115837507A CN 115837507 A CN115837507 A CN 115837507A CN 202310158556 A CN202310158556 A CN 202310158556A CN 115837507 A CN115837507 A CN 115837507A
- Authority
- CN
- China
- Prior art keywords
- positioning
- overturning
- section steel
- assembly
- processed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P70/00—Climate change mitigation technologies in the production process for final industrial or consumer products
- Y02P70/10—Greenhouse gas [GHG] capture, material saving, heat recovery or other energy efficient measures, e.g. motor control, characterised by manufacturing processes, e.g. for rolling metal or metal working
Abstract
本发明公开一种叉车门架型钢自动化切割装置,包括:定位翻转组件、分别设置在定位翻转组件两端的上料辊道和下料辊道、设置在上料辊道旁的上料机器人、安装在定位翻转组件旁的带地轨切割机器人以及放置在定位翻转组件下方的废料收集车;定位翻转组件包括:用于对待加工的型钢定位的定位台和设置在定位台下方用于翻转待加工的型钢的翻转台;所述带地轨切割机器人用于将定位翻转组件上定位翻转后的待加工的型钢进行加工,下料辊道用于输送定位翻转组件上加工后的型钢,废料收集车用于收集型钢切割后的废料;本装置可以自动将型钢切割成所需要的形状,加工效率高,节省时间,并且可以保证加工后型钢的一致性,保证加工后型钢的质量,节省人力。
Description
技术领域
本发明涉及一种型钢切割设备,具体是一种叉车门架型钢自动化切割装置,主要应用于叉车门架用槽钢两端及双面切割工位的自动化切割。
背景技术
叉车门架型钢分为内、中、外门架型钢,型钢的截面形状为C型、H型、J型,在型钢两端的两个相互垂直的面上,都有需要加工的面;现有的加工方法是先等离子切割好一端的一面,再进行机加工铣平面;然后掉头等离子切割另一端的一面,这种方法中间工序周转环节多、同时调运浪费人力及物力、生产效率低。
发明内容
针对上述现有技术存在的问题,本发明提供一种叉车门架型钢自动化切割装置,以克服以上述技术问题,本切割装置能够实现叉车门架型钢切割的双向定位、双向翻转、自动上下料的自动化切割。
为了实现上述目的,本发明采用的技术方案是:一种叉车门架型钢自动化切割装置,包括:定位翻转组件、分别设置在定位翻转组件两端的上料辊道和下料辊道、设置在上料辊道旁的上料机器人、安装在定位翻转组件旁的带地轨切割机器人以及放置在定位翻转组件下方的废料收集车;所述定位翻转组件包括:用于对待加工的型钢定位的定位台和设置在定位台下方用于翻转待加工的型钢的翻转台;所述带地轨切割机器人用于将定位翻转组件上定位翻转后的待加工的型钢进行加工,下料辊道用于输送定位翻转组件上加工后的型钢,所述废料收集车用于收集型钢切割后的废料。
进一步的,所述定位台包括:侧面定位组件、端面定位组件、工件检测开关、定位辊道,所述工件检测开关设置在端面定位组件侧面,用于检测待加工的型钢是否到位,所述侧面定位组件安装在定位辊道侧面,对定位辊道上到位的待加工的型钢侧面位置进行调整定位,端面定位组件安装在定位辊道的一端,用于对定位辊道上待加工的型钢进行端面进行调整定位,使待加工的型钢位于带地轨切割机器人的切割工位。
进一步的,所述侧面定位组件包括:伸缩气缸以及安装在伸缩气缸输出轴端部的定位板。
进一步的,所述端面定位组件包括:直线滑台、龙门架、挡板,所述龙门架的两端通过直线滑台安装在定位台,使龙门架横跨在定位台的上方,所述挡板的上端安装在龙门架的横梁上,其下端伸向定位台。
进一步的,所述挡板的伸向定位台的高度大于未翻转的待加工的型钢上表面至龙门架横梁下表面的高度,小于翻转后待加工的型钢上表面至龙门架横梁下表面的高度。
进一步的,所述翻转台包括:升降气缸、升降平台支架、升降平台、升降导向组件、夹紧翻转机构、传动机构、翻转驱动组件;所述升降平台通过升降导向组件安装在升降平台支架上方,所述升降气缸设置在升降平台与升降平台支架之间,用于控制升降平台上下运动,所述升降平台上方设有多个立柱,夹紧翻转机构铰接在立柱的上方,所述翻转驱动组件安装在升降支架上,翻转驱动组件通过传动机构控制夹紧翻转机构翻转。
进一步的,所述夹紧翻转机构包括:大辅助轮、夹紧滚轮、夹紧气缸、垫板,所述大辅助轮铰接在立柱上,夹紧气缸与大辅助轮固定连接,垫板设置在与打辅助轮相对的夹紧气缸另一侧,所述夹紧滚轮设置在垫板的两端,并安装在夹紧滚轮输出轴上。
进一步的,所述传动机构包括:驱动轮、从动轮、传送带、传动轴,小辅助轮,所述传动轴穿过多个立柱并位于多个所述的夹紧翻转机构的下方,多个所述小辅助轮分别安装在传动轴上,并与对应的夹紧翻转机构中的大辅助轮位于同一直线上,所述驱动轮安装翻转驱动组件的输出轴上,所述从动轮安装在输出轴靠近翻转驱动组件的端部,驱动轮与从动轮之间、小辅助轮与大辅助轮之间通过传送带连接。
进一步的,所述上料辊道与下料辊道中的输送辊上设有导向轮,所述导向轮与输送辊同步转动。
本发明揭示了一种叉车门架型钢自动化切割装置,其有益效果是:
(1)通过在上料辊道和下料辊道上的输送辊设置导向轮,可以对其进行待加工的型钢进行导向定位,防止传送是出现较大的偏移,保证进入后续工序的型钢偏移量小,减少调整范围,缩小定位台的宽度;
(2)采用带地轨切割机器人可以是切割机器人进行移动,实现可以根据不同切割要求进行编程调整,提高适用性,同时还可以保证对型钢两端进行切割;
(3)通过定位台可以对型钢进行左右和前后的调节,进而保证型钢切割时的位置,提高型钢切割的精度,保证一致性;
(4)通过翻转台将型钢夹紧后可以进行左右翻转和上下运动,实现对型钢的侧面进行切割,并且保证其精度,在翻转台中的夹紧翻转机构中设置夹紧滚轮和垫板,夹紧滚轮可以围绕中心轴旋转,减少型钢端面定位移动的摩擦力;垫板可以对型钢起到支撑作用,也可以保护夹紧气缸不被外力损坏;
(5)本装置可以自动将型钢切割成所需要的形状,加工效率高,节省时间,并且可以保证加工后型钢的一致性,保证加工后型钢的质量,节省人力。
附图说明
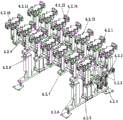
图1为本发明的结构示意图;
图2为本发明中上料机器人结构示意图;
图3为本发明中带地轨切割机器人结构示意图;
图4为本发明中定位翻转组件结构示意图;
图5为定位翻转组件中定位台结构示意图;
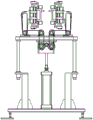
图6为定位翻转组件中翻转台结构示意图;
图7为翻转台翻转立体结构示意图;
图8为翻转台夹持后上升工作示意图;
图9为翻转台向内翻转90°工作示意图;
图10为翻转台向外翻转90°工作示意图;
图中:1、上料机器人;1.1、固定座;1.2、机器人本体;1.3、机器人抓手;2、上料辊道;3、带地轨切割机器人;3.1、地轨组件;3.2、机器人本体;3.3、割枪;4、定位翻转组件;4.1、定位台;4.1.1、侧面定位组件;4.1.2、端面定位组件;4.1.2.1、直线滑台;4.1.2.2、龙门架;4.1.2.3、挡板;4.1.3、工件检测开关;4.1.4、定位台辊道;4.2、翻转台;4.2.1、翻转驱动组件;4.2.2、传送带;4.2.3、从动轮;4.2.4、驱动轮;4.2.5、升降气缸;4.2.6、升降平台支架;4.2.7、升降平台;4.2.8、升降导向组件;4.2.9、传动轴;4.2.10、小辅助轮;4.2.11、大辅助轮;4.2.12、夹紧滚轮;4.2.13、垫板;4.2.14、夹紧气缸;5、废料收集车;6、下料辊道;7、型钢。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图及实施例,对本发明进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限制本发明的范围。
除非另有定义,本文所使用的所有的技术术语和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同,本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
如图1所示,一种叉车门架型钢自动化切割装置,包括:上料机器人1、上料辊道2、带地轨切割机器人3、定位翻转组件4、下料辊道6、废料收集车5,所述上料辊道2、下料辊道6分别设置在定位翻转组件4的两端,所述上料机器人1设置在上料辊道2旁,用于待加工的型钢7搬运至上料辊道2上,通过上料辊道2将待加工的型钢7输送至定位翻转组件4上,所述定位翻转组件4包括:用于对待加工的型钢7定位的定位台4.1和设置在定位台4.1下方用于翻转待加工的型钢7的翻转台4.2;所述带地轨切割机器人3设置在定位翻转组件4旁,用于将定位翻转组件4上定位翻转后的待加工的型钢7进行加工,下料辊道6用于输送定位翻转组件4上加工后的型钢7,所述废料收集车5设置在定位台4.1的下方,用于收集型钢7切割后的废料。
如图2所示,上料机器人1由固定座1.1、机器人本体1.2、机器人抓手1.3组成,机器人抓手1.3上安装有电磁铁,机器人本体1.2根据设定的程序带动机器人抓手1.3将地面料盘上的型钢7抓至上料辊道2上。
如图3所示,带地轨切割机器人3由地轨组件3.1、机器人本体3.2、割枪3.3组成,地轨组件3.1可以载着机器人本体3.2移动;机器人本体3.2根据设定程序带动割枪3.3进行切割工作。
如图4-图5所示,定位台4.1可以使待加工的型钢7前后、左右定位;翻转台4.2可以使待加工的型钢7翻转正、负90度;定位台4.1与翻转台4.2通过地脚分别固定在地面上。
如图4-图5所示,所述定位台4.1包括:侧面定位组件4.1.1、端面定位组件4.1.2、工件检测开关4.1.3、定位辊道,所述工件检测开关4.1.3设置在端面定位组件上侧面,用于检测待加工的型钢7是否到位,所述侧面定位组件4.1.1安装在定位辊道侧面,对定位辊道上到位的待加工的型钢7侧面位置进行调整定位,端面定位组件4.1.2安装在定位辊道的一端,用于对定位辊道上待加工的型钢7进行端面进行调整定位,使待加工的型钢7位于带地轨切割机器人3的切割工位。
如图5所示,工件检测开关4.1.3的数量至少与定位台4.1上同时放置型钢7数量相同,保证可以对不同型钢7位置进行检测。
如图4-图5所示,侧面定位组件4.1.1数量至少为定位台4.1上同时放置型钢7数量的两倍,通过至少两个侧面定位组件4.1.1才可以将长条形的型钢7的位置调整平齐。
如图4-图5所示,所述侧面定位组件4.1.1包括:伸缩气缸以及安装在伸缩气缸输出轴端部的定位板;所述端面定位组件4.1.2包括:直线滑台4.1.2.1、龙门架4.1.2.2、挡板4.1.2.3,所述龙门架4.1.2.2的两端通过直线滑台4.1.2.1安装在定位台4.1,使龙门架4.1.2.2横跨在定位台4.1的上方,所述挡板4.1.2.3的上端安装在龙门架4.1.2.2的横梁上,其下端伸向定位台4.1;当工件检测开关4.1.3检测到型钢7时,定位辊道停止输送工型钢7、侧面定位组件4.1.1的伸缩气缸输出轴伸出,将待加工的型钢7推至固定位置;端面定位组件4.1.2中的龙门架4.1.2.2可前后移动,进而通过挡板4.1.2.3调节待加工的型钢7的位置,使待加工的型钢7位于带地轨切割机器人3的设定的切割工位,实现待加工的型钢7的端部定位;所述直线滑台4.1.2.1为伺服电机驱动的直线滑台4.1.2.1。
如图5所示,所述挡板4.1.2.3的数量等于定位台4.1上同时放置的型钢7的数量,并且一一对应。
如图4-图5所示,所述挡板4.1.2.3的伸向定位台4.1的高度大于未翻转的待加工的型钢7上表面至龙门架4.1.2.2横梁下表面的高度,小于翻转后待加工的型钢7上表面至龙门架4.1.2.2横梁下表面的高度,保证在龙门架4.1.2.2不能升降的情况下,可以对待加工的型钢7进行位置调节。
如图6-图7所示,所述翻转台4.2包括:升降气缸4.2.5、升降平台支架4.2.6、升降平台4.2.7、升降导向组件4.2.8、夹紧翻转机构、传动机构、翻转驱动组件4.2.1;所述升降平台4.2.7通过升降导向组件4.2.8安装在升降平台支架4.2.6上方,所述升降气缸4.2.5设置在升降平台4.2.7与升降平台支架4.2.6之间,用于控制升降平台4.2.7上下运动,所述升降平台4.2.7上方设有多个立柱,夹紧翻转机构铰接在立柱的上方,所述翻转驱动组件4.2.1安装在升降支架上,翻转驱动组件4.2.1通过传动机构控制夹紧翻转机构翻转。
多个所述的夹紧翻转机构可以根据需要同时翻转的型材的数量分成多列。
升降气缸4.2.5可以带动升降平台4.2.7整体升降;升降导向组件4.2.8可以对升降平台4.2.7进行导向,使整体刚性更好、升降更顺畅,所述升降导向组件4.2.8为滑杆机构。
如图6所示,翻转台4.2初始位置为:升降平台4.2.7在最低位置;夹紧气缸4.2.14处于张开状态、垫板4.2.13处于水平零点位置;翻转驱动组件4.2.1通过传动机构带动夹紧翻转机构内翻90度或者外翻90度;翻转驱动组件4.2.1正转、翻转可实现不同方向的翻转,进而实现对待加工的型钢7进行翻转。
其中,翻转驱动组件4.2.1为带有减速机的电机,所述电机为步进电机或伺服电机。
如图6-图7所示,所述夹紧翻转机构包括:大辅助轮4.2.11、夹紧滚轮4.2.12、夹紧气缸4.2.14、垫板4.2.13,所述大辅助轮4.2.11铰接在立柱上,夹紧气缸4.2.14与大辅助轮4.2.11固定连接,垫板4.2.13设置在与打辅助轮相对的夹紧气缸4.2.14另一侧,所述夹紧滚轮4.2.12设置在垫板4.2.13的两端,并安装在夹紧滚轮4.2.12输出轴上;通过大辅助轮4.2.11与夹紧气缸4.2.14固定,并且大辅助轮4.2.11铰接在立柱上,通过控制大辅助轮4.2.11的旋转即可控制夹紧气缸4.2.14的旋转,夹紧滚轮4.2.12可以围绕中心轴旋转,可以减少工件端面定位移动的摩擦力;垫板4.2.13可以对工件起到支撑作用,也可以保护夹紧气缸4.2.14不被外力损坏。
如图6-图7所示,所述传动机构包括:驱动轮4.2.4、从动轮4.2.3、传送带4.2.2、传动轴4.2.9,小辅助轮4.2.10,所述传动轴4.2.9穿过多个立柱并位于多个所述的夹紧翻转机构的下方,多个所述小辅助轮4.2.10分别安装在传动轴4.2.9上,并与对应的夹紧翻转机构中的大辅助轮4.2.11位于同一直线上,所述驱动轮4.2.4安装翻转驱动组件4.2.1的输出轴上,所述从动轮4.2.3安装在输出轴靠近翻转驱动组件4.2.1的端部,驱动轮4.2.4与从动轮4.2.3之间、小辅助轮4.2.10与大辅助轮4.2.11之间通过传送带4.2.2连接,实现同步传动,提高翻转的稳定性。
如图1所示,所述上料辊道2与下料辊道6中的输送辊上设有导向轮,所述导向轮与输送辊同步转动,通过导向轮可以对其进行待加工的型钢7进行导向定位,防止传送是出现较大的偏移,影响切割的效果。
如图1、图6、图7所示,定位台4.1可以对两个型钢7型进行定位,上料辊道2与下料辊道6中的输送辊上设有两个导向轮,定位台4.1上的多个侧面定位组件4.1.1分别设置在对应的型钢7一侧,多个夹紧翻转机构设置两列,所述上料机器人1和带地轨切割机器人3可以根据实际需求进行增加。
工作流程:
上料机器人1抓取待加工的型钢7放置在上料辊道2上(辊道上同时放置2件工件);
上料辊道2将工件输送至定位翻转组件4工位,工件检测开关4.1.3检测到工件,定位辊道停止输送,通过侧面定位组件4.1.1对调整待加工的型钢7至固定位置;
翻转台4.2升起,到位后夹紧气缸4.2.14动作,通过夹紧滚轮4.2.12夹紧工件,如图8所示;
端面定位组件4.1.2工作,将待加工的型钢7推至切割工位;
根据切割需要,翻转驱动组件4.2.1通过传动机构驱动2个工件同时内翻或同时外翻90度,如图9-图10所示;
翻转到位后,带地轨切割机器人3开始切割(可同时加工2个工件,左右对称);
切割完毕后,根据型钢7需要是否切割另一端,若需要同时切割,翻转台4.2复位至水平位置,端面定位组件4.1.2动作,将型钢7推至另一端切割工位;
根据切割需要,翻转驱动组件4.2.1通过传动机构驱动2个型钢7同时内翻或同时外翻90度,如图9-图10所示;
机器人本体3.2、在地轨组件3.1上移动至另一端切割工位,翻转到位后开始切割;
切割完毕后,翻转台4.2复位至水平位置、夹紧气缸4.2.14松开、升降气缸4.2.5下降、定位辊道运行;将工件输送至下料辊道6,进入下一道工序。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。
Claims (9)
1.一种叉车门架型钢自动化切割装置,其特征在于,包括:定位翻转组件(4)、分别设置在定位翻转组件(4)两端的上料辊道(2)和下料辊道(6)、设置在上料辊道(2)旁的上料机器人(1)、安装在定位翻转组件(4)旁的带地轨切割机器人(3)以及放置在定位翻转组件(4)下方的废料收集车(5);所述定位翻转组件(4)包括:用于对待加工的型钢(7)定位的定位台(4.1)和设置在定位台(4.1)下方用于翻转待加工的型钢(7)的翻转台(4.2);所述带地轨切割机器人(3)用于将定位翻转组件(4)上定位翻转后的待加工的型钢(7)进行加工,下料辊道(6)用于输送定位翻转组件(4)上加工后的型钢(7),所述废料收集车(5)用于收集型钢(7)切割后的废料。
2.根据权利要求1所述的一种叉车门架型钢自动化切割装置,其特征在于,所述定位台(4.1)包括:侧面定位组件(4.1.1)、端面定位组件(4.1.2)、工件检测开关(4.1.3)、定位辊道,所述工件检测开关(4.1.3)设置在端面定位组件(4.1.2)侧面,用于检测待加工的型钢(7)是否到位,所述侧面定位组件(4.1.1)安装在定位辊道侧面,对定位辊道上到位的待加工的型钢(7)侧面位置进行调整定位,端面定位组件(4.1.2)安装在定位辊道的一端,用于对翻转后待加工的型钢(7)进行端面进行调整定位,使待加工的型钢(7)位于带地轨切割机器人(3)的切割工位。
3.根据权利要求2所述的一种叉车门架型钢自动化切割装置,其特征在于,所述侧面定位组件(4.1.1)包括:伸缩气缸以及安装在伸缩气缸输出轴端部的定位板。
4.根据权利要求2所述的一种叉车门架型钢自动化切割装置,其特征在于,所述端面定位组件(4.1.2)包括:直线滑台(4.1.2.1)、龙门架(4.1.2.2)、挡板(4.1.2.3),所述龙门架(4.1.2.2)的两端通过直线滑台(4.1.2.1)安装在定位台(4.1)上,使龙门架(4.1.2.2)横跨在定位台(4.1)的上方,所述挡板(4.1.2.3)的上端安装在龙门架(4.1.2.2)的横梁上,其下端伸向定位台(4.1)。
5.根据权利要求4所述的一种叉车门架型钢自动化切割装置,其特征在于,所述挡板(4.1.2.3)的伸向定位台(4.1)的高度大于未翻转的待加工的型钢(7)上表面至龙门架(4.1.2.2)横梁下表面的高度,小于翻转后待加工的型钢(7)上表面至龙门架(4.1.2.2)横梁下表面的高度。
6.根据权利要求1所述的一种叉车门架型钢自动化切割装置,其特征在于,所述翻转台(4.2)包括:升降气缸(4.2.5)、升降平台支架(4.2.6)、升降平台(4.2.7)、升降导向组件(4.2.8)、夹紧翻转机构、传动机构、翻转驱动组件(4.2.1);所述升降平台(4.2.7)通过升降导向组件(4.2.8)安装在升降平台支架(4.2.6)上方,所述升降气缸(4.2.5)设置在升降平台(4.2.7)与升降平台支架(4.2.6)之间,用于控制升降平台(4.2.7)上下运动,所述升降平台(4.2.7)上方设有多个立柱,夹紧翻转机构铰接在立柱的上方,所述翻转驱动组件(4.2.1)安装在升降支架上,翻转驱动组件(4.2.1)通过传动机构控制夹紧翻转机构翻转。
7.根据权利要求6所述的一种叉车门架型钢自动化切割装置,其特征在于,所述夹紧翻转机构包括:大辅助轮(4.2.11)、夹紧滚轮(4.2.12)、夹紧气缸(4.2.14)、垫板(4.2.13),所述大辅助轮(4.2.11)铰接在立柱上,夹紧气缸(4.2.14)与大辅助轮(4.2.11)固定连接,垫板(4.2.13)设置在与打辅助轮相对的夹紧气缸(4.2.14)另一侧,所述夹紧滚轮(4.2.12)设置在垫板(4.2.13)的两端,并安装在夹紧滚轮(4.2.12)输出轴上。
8.根据权利要求7所述的一种叉车门架型钢自动化切割装置,其特征在于,所述传动机构包括:驱动轮(4.2.4)、从动轮(4.2.3)、传送带(4.2.2)、传动轴(4.2.9),小辅助轮(4.2.10),所述传动轴(4.2.9)穿过多个立柱并位于多个所述的夹紧翻转机构的下方,多个所述小辅助轮(4.2.10)分别安装在传动轴(4.2.9)上,并与对应的夹紧翻转机构中的大辅助轮(4.2.11)位于同一直线上,所述驱动轮(4.2.4)安装翻转驱动组件(4.2.1)的输出轴上,所述从动轮(4.2.3)安装在输出轴靠近翻转驱动组件(4.2.1)的端部,驱动轮(4.2.4)与从动轮(4.2.3)之间、小辅助轮(4.2.10)与大辅助轮(4.2.11)之间通过传送带(4.2.2)连接。
9.根据权利要求1所述的一种叉车门架型钢自动化切割装置,其特征在于,所述上料辊道(2)与下料辊道(6)中的输送辊上设有导向轮,所述导向轮与输送辊同步转动。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310158556.2A CN115837507B (zh) | 2023-02-24 | 2023-02-24 | 一种叉车门架型钢自动化切割装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310158556.2A CN115837507B (zh) | 2023-02-24 | 2023-02-24 | 一种叉车门架型钢自动化切割装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN115837507A true CN115837507A (zh) | 2023-03-24 |
| CN115837507B CN115837507B (zh) | 2023-05-12 |
Family
ID=85580086
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202310158556.2A Active CN115837507B (zh) | 2023-02-24 | 2023-02-24 | 一种叉车门架型钢自动化切割装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115837507B (zh) |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07112298A (ja) * | 1993-10-18 | 1995-05-02 | Shinobu Onishi | 長尺ワークの両端自動加工方法及びその装置 |
| CN102950358A (zh) * | 2012-10-18 | 2013-03-06 | 青岛东方铁塔股份有限公司 | H型钢火焰等离子三面切割成型机 |
| CN203696316U (zh) * | 2014-01-23 | 2014-07-09 | 安徽好运机械有限公司 | 一种叉车槽钢自动下料装置 |
| CN205057191U (zh) * | 2015-10-23 | 2016-03-02 | 合力工业车辆(盘锦)有限公司 | 一种用于叉车门架槽钢自动切割装置 |
| CN106995136A (zh) * | 2017-05-02 | 2017-08-01 | 广东天机工业智能系统有限公司 | 自动翻转装置 |
| CN110303279A (zh) * | 2019-07-19 | 2019-10-08 | 浙江精功科技股份有限公司 | 一种h型钢卧式预拼装装置 |
| CN110509098A (zh) * | 2019-08-22 | 2019-11-29 | 东风设备制造有限公司 | 一种带定位孔的异形工件输送及定位翻转装置及自动化生产线 |
| CN113213164A (zh) * | 2021-06-01 | 2021-08-06 | 江南造船(集团)有限责任公司 | 一种船舶型钢自动翻转固定方法 |
| CN113560694A (zh) * | 2021-09-08 | 2021-10-29 | 济南光先数控机械有限公司 | 一种型钢加工生产装置 |
| CN217071102U (zh) * | 2021-11-26 | 2022-07-29 | 成都鑫泽机械有限公司 | 一种全自动型钢切割设备 |
-
2023
- 2023-02-24 CN CN202310158556.2A patent/CN115837507B/zh active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07112298A (ja) * | 1993-10-18 | 1995-05-02 | Shinobu Onishi | 長尺ワークの両端自動加工方法及びその装置 |
| CN102950358A (zh) * | 2012-10-18 | 2013-03-06 | 青岛东方铁塔股份有限公司 | H型钢火焰等离子三面切割成型机 |
| CN203696316U (zh) * | 2014-01-23 | 2014-07-09 | 安徽好运机械有限公司 | 一种叉车槽钢自动下料装置 |
| CN205057191U (zh) * | 2015-10-23 | 2016-03-02 | 合力工业车辆(盘锦)有限公司 | 一种用于叉车门架槽钢自动切割装置 |
| CN106995136A (zh) * | 2017-05-02 | 2017-08-01 | 广东天机工业智能系统有限公司 | 自动翻转装置 |
| CN110303279A (zh) * | 2019-07-19 | 2019-10-08 | 浙江精功科技股份有限公司 | 一种h型钢卧式预拼装装置 |
| CN110509098A (zh) * | 2019-08-22 | 2019-11-29 | 东风设备制造有限公司 | 一种带定位孔的异形工件输送及定位翻转装置及自动化生产线 |
| CN113213164A (zh) * | 2021-06-01 | 2021-08-06 | 江南造船(集团)有限责任公司 | 一种船舶型钢自动翻转固定方法 |
| CN113560694A (zh) * | 2021-09-08 | 2021-10-29 | 济南光先数控机械有限公司 | 一种型钢加工生产装置 |
| CN217071102U (zh) * | 2021-11-26 | 2022-07-29 | 成都鑫泽机械有限公司 | 一种全自动型钢切割设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115837507B (zh) | 2023-05-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN212121871U (zh) | 托辊全自动生产线用自动上料、输送、定尺切割机构 | |
| CN106378576A (zh) | 罐式容器装配台及装配方法 | |
| CN113941790B (zh) | 焊接生产线 | |
| CN108465967B (zh) | 一种用于角钢栅格板加工的高效生产线及其工作方法 | |
| CN107159814A (zh) | 一种汽车门框内外板自动冲切流水线 | |
| CN207615546U (zh) | 一种汽车门框内外板自动冲切流水线 | |
| CN116275722A (zh) | 一种型钢拱架自动生产线 | |
| CN115837507A (zh) | 一种叉车门架型钢自动化切割装置 | |
| CN210280439U (zh) | 一种厚板冲压板料重力对中台 | |
| CN216227642U (zh) | 自动化焊接生产线 | |
| CN112850154B (zh) | 一种纵骨全程自动送料定位装置及方法 | |
| CN115319363A (zh) | 一种路灯灯杆自动焊接生产线及方法 | |
| CN211494129U (zh) | 搬运笨重工件的轨道升降车 | |
| CN210001086U (zh) | 数控切割机的下料堆叠装置 | |
| CN113070411A (zh) | 一种轮辐板料拉伸工序中的上下料装置 | |
| CN220534222U (zh) | 一种稳定型桁架机器人 | |
| CN113751932B (zh) | 一种钢梁檩托件自动组立焊接设备 | |
| CN112978264B (zh) | 一种侧柱输送装置以及铁路货车侧柱生产线 | |
| CN218426631U (zh) | 引导轮翻转变位机 | |
| KR100317616B1 (ko) | 선박용 철판과 보강재의 용접장치 | |
| CN211803330U (zh) | 一种轮辐冲螺栓孔工序中的自动上下料装置 | |
| CN216071984U (zh) | 一种用于锯材卸垛上料的推板装置 | |
| CN215393513U (zh) | 一种大型钢结构焊接装置 | |
| CN215966828U (zh) | 一种碰焊机构 | |
| CN217726717U (zh) | 一种方便翻转型材的矫直机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |