CN115353034A - 一种基于视觉的智能显示终端的机器人装卸系统 - Google Patents
一种基于视觉的智能显示终端的机器人装卸系统 Download PDFInfo
- Publication number
- CN115353034A CN115353034A CN202111308022.0A CN202111308022A CN115353034A CN 115353034 A CN115353034 A CN 115353034A CN 202111308022 A CN202111308022 A CN 202111308022A CN 115353034 A CN115353034 A CN 115353034A
- Authority
- CN
- China
- Prior art keywords
- plate
- hydraulic cylinder
- display terminal
- vision
- intelligent display
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/08—Masts; Guides; Chains
- B66F9/082—Masts; Guides; Chains inclinable
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/063—Automatically guided
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/12—Platforms; Forks; Other load supporting or gripping members
- B66F9/14—Platforms; Forks; Other load supporting or gripping members laterally movable, e.g. swingable, for slewing or transverse movements
- B66F9/142—Movements of forks either individually or relative to each other
- B66F9/143—Movements of forks relative to each other - symmetric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/12—Platforms; Forks; Other load supporting or gripping members
- B66F9/16—Platforms; Forks; Other load supporting or gripping members inclinable relative to mast
- B66F9/165—Foldable forks, i.e. where only the horizontal section moves
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/20—Means for actuating or controlling masts, platforms, or forks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/20—Means for actuating or controlling masts, platforms, or forks
- B66F9/22—Hydraulic devices or systems
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Forklifts And Lifting Vehicles (AREA)
Abstract
本发明公开了一种基于视觉的智能显示终端的机器人装卸系统,包括底座和设置在底座上的前轮和后轮,所述底座内设有驱动后轮转动的动力系统,所述底座内开设有凹槽,所述凹槽的前端转动安装有框架,所述凹槽内设有驱动框架转动折叠的第一驱动机构。本发明中,PLC控制模块可以控制第一液压缸、第二液压缸和第三液压缸以及发动机和转向机构,无线传输模块接收和向智能显示终端传输指令,人在智能显示终端上下指令,无线传输模块接收指令将信号传输至PLC控制模块,PLC控制模块控制相应的电气件执行指令,不需要人工上车操作,减轻了工人的工作负担。
Description
技术领域
本发明涉及装卸系统技术领域,尤其涉及一种基于视觉的智能显示终端的机器人装卸系统。
背景技术
现有技术中的货物装卸系统大多通过叉车进行的,叉车是工业搬运车辆,是指对成件托盘货物进行装卸、堆垛和短距离运输作业的各种轮式搬运车辆,叉车在工业生产中应用广泛。
然而,首先,现有技术中叉车的操作离不开人工,需要人工坐在叉车上对叉车操作才能完成装卸工作,进而加重了工人的工作强度,其次,现有的叉车的框架和货叉不可折叠,在不使用的时候叉车整体会占据较大的空间,且人员误碰货叉也会导致人员受伤,降低了使用的安全性,不便于使用。
发明内容
为了解决上述背景技术中所提到的技术问题,而提出的一种基于视觉的智能显示终端的机器人装卸系统。
为了实现上述目的,本发明采用了如下技术方案:
一种基于视觉的智能显示终端的机器人装卸系统,包括底座和设置在底座上的前轮和后轮,所述底座内设有驱动后轮转动的动力系统,所述底座内开设有凹槽,所述凹槽的前端转动安装有框架,所述凹槽内设有驱动框架转动折叠的第一驱动机构;
所述框架的前端设有升降板,所述升降板上安装有可折叠的货叉,所述框架上设有驱动升降板在竖直方向上运动的传动机构,所述凹槽内固定安装有斜块。
作为上述技术方案的进一步描述:
所述第一驱动机构包括第一液压缸,所述凹槽内固定连接有四个固定座,两个所述固定座之间转动安装有第一底板,所述第一底板上固定安装有第一液压缸,所述第一液压缸的活塞杆上固定连接有转动块,所述框架上固定安装有固定板,所述固定板两侧固定安装有安装座,两个所述安装座之间固定安装有固定杆,所述固定杆穿过转动块且与转动块转动安装。
作为上述技术方案的进一步描述:
所述传动机构包括第二液压缸,所述框架上固定安装有第二液压缸,所述第二液压缸的活塞杆上固定安装有支杆,所述支杆内开设有安装槽,所述安装槽内转动安装有第一齿轮,所述框架底部固定安装有链条,所述链条的另一端与升降板顶部固定安装,所述链条绕过第一齿轮与其啮合连接。
作为上述技术方案的进一步描述:
所述升降板上开设有滑动槽,所述货叉上固定连接有在滑动槽内滑动的滑动块,其中一个所述货叉上固定安装有第一连接块,所述第一连接块上固定安装有第一齿条板,另一个所述货叉上固定安装有第二连接块,所述第二连接块上固定安装有第二齿条板,所述升降板内固定安装有中心轴,所述中心轴上转动安装有第二齿轮,所述第二齿轮分别与第一齿条板和第二齿条板啮合连接,所述升降板内设有驱动第二齿轮转动的第三驱动机构。
作为上述技术方案的进一步描述:
所述第三驱动机构包括第三液压缸,所述升降板内固定安装有第三液压缸,所述第三液压缸的活塞杆与第一齿条板固定安装。
作为上述技术方案的进一步描述:
所述货叉包括竖臂和前叉,所述竖臂底部固定连接有第二底板,所述第二底板内开设有方槽,所述方槽内转动安装有转动板,所述转动板与前叉固定安装,所述第二底板上设有定位机构。
作为上述技术方案的进一步描述:
所述定位机构包括定位球,所述转动板内开设有定位孔,所述第二底板内开设有缓冲槽,所述缓冲槽一端弹性连接有弹簧,所述弹簧的自由端弹性连接有插入定位孔的定位球。
作为上述技术方案的进一步描述:
所述竖臂上固定安装有第一磁铁,所述前叉上设有与第一磁铁磁性相异的第二磁铁。
综上所述,由于采用了上述技术方案,本发明的有益效果是:
1、本发明中,PLC控制模块可以控制第一液压缸、第二液压缸和第三液压缸以及发动机和转向机构,无线传输模块接收和向智能显示终端传输指令,人在智能显示终端上下指令,无线传输模块接收指令将信号传输至PLC控制模块,PLC控制模块控制相应的电气件执行指令,不需要人工上车操作,减轻了工人的工作负担。
2、本发明中,启动第一液压缸的活塞杆缩回,转动块在固定杆上转动,驱动框架向凹槽内转动,框架与斜块接触,此时,框架收纳在凹槽内,转动前叉使前叉与竖臂贴紧,第一磁铁吸住第二磁铁,将前叉固定在竖臂上,将货叉进行折叠,整体占据较小的空间,避免人员误碰货叉导致其受伤,提高了使用的安全性。
3、本发明中,启动第三液压缸,带动第一齿条板运动,通过第一连接块带动其中一个货叉运动,根据卡齿的啮合传动原理,驱动第二齿轮转动,进而驱动第二齿条板运动,驱动另一个货叉运动,且第二齿条板与第一齿条板的运动方向相反,进而可以调节两个货叉之间的距离,便于使用。
附图说明
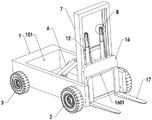
图1示出了根据本发明实施例提供的一种基于视觉的智能显示终端的机器人装卸系统的第一轴测示意图;
图2示出了根据本发明实施例提供的一种基于视觉的智能显示终端的机器人装卸系统的第二轴测示意图;
图3示出了根据本发明实施例提供的一种基于视觉的智能显示终端的机器人装卸系统的局部结构示意图;
图4示出了根据本发明实施例提供的一种基于视觉的智能显示终端的机器人装卸系统的部分零件的第一角度示意图;
图5示出了根据本发明实施例提供的一种基于视觉的智能显示终端的机器人装卸系统的部分零件的第二角度示意图;
图6示出了根据本发明实施例提供的一种基于视觉的智能显示终端的机器人装卸系统的货叉第一状态结构示意图;
图7示出了根据本发明实施例提供的一种基于视觉的智能显示终端的机器人装卸系统的货叉第二状态结构示意图;
图8示出了根据本发明实施例提供的一种基于视觉的智能显示终端的机器人装卸系统的货叉的俯视示意图;
图9示出了根据本发明实施例提供的A处的放大示意图;
图10示出了根据本发明实施例提供的B处的放大示意图;
图11示出了根据本发明实施例提供的C处的放大示意图;
图12示出了根据本发明实施例提供的D处的放大示意图。
图例说明:
1、底座;101、凹槽;2、前轮;3、后轮;4、固定座;5、第一底板;6、第一液压缸;7、框架;8、固定板;9、安装座;10、固定杆;11、转动块;12、第二液压缸;13、支杆;1301、安装槽;14、第一齿轮;15、链条;16、升降板;1601、滑动槽;17、货叉;18、第一连接块;19、第一齿条板;20、第二连接块;21、第二齿条板;22、第三液压缸;23、第二齿轮;24、滑动块;25、中心轴;26、斜块;27、竖臂;28、第二底板;2801、方槽;2802、缓冲槽;29、转动板;2901、定位孔;30、前叉;31、弹簧;32、定位球;33、第一磁铁;34、第二磁铁。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施例
请参阅图1-12,本发明提供一种技术方案:一种基于视觉的智能显示终端的机器人装卸系统,包括底座1和设置在底座1上的前轮2和后轮3,底座1内设有驱动后轮3转动的动力系统,动力系统包括发动机和转向机构,底座1内开设有凹槽101,凹槽101的前端转动安装有框架7,凹槽101内设有驱动框架7转动折叠的第一驱动机构;
框架7的前端设有升降板16,升降板16上安装有可折叠的货叉17,框架7上设有驱动升降板16在竖直方向上运动的传动机构,凹槽101内固定安装有斜块26,第一驱动机构包括第一液压缸6,凹槽101内固定连接有四个固定座4,两个固定座4之间转动安装有第一底板5,第一底板5上固定安装有第一液压缸6,第一液压缸6的活塞杆上固定连接有转动块11,框架7上固定安装有固定板8,固定板8两侧固定安装有安装座9,两个安装座9之间固定安装有固定杆10,固定杆10穿过转动块11且与转动块11转动安装。
传动机构包括第二液压缸12,框架7上固定安装有第二液压缸12,第二液压缸12的活塞杆上固定安装有支杆13,支杆13内开设有安装槽1301,安装槽1301内转动安装有第一齿轮14,框架7底部固定安装有链条15,链条15的另一端与升降板16顶部固定安装,链条15绕过第一齿轮14与其啮合连接。
升降板16上开设有滑动槽1601,货叉17上固定连接有在滑动槽1601内滑动的滑动块24,其中一个货叉17上固定安装有第一连接块18,第一连接块18上固定安装有第一齿条板19,另一个货叉17上固定安装有第二连接块20,第二连接块20上固定安装有第二齿条板21,升降板16内固定安装有中心轴25,中心轴25上转动安装有第二齿轮23,第二齿轮23分别与第一齿条板19和第二齿条板21啮合连接,升降板16内设有驱动第二齿轮23转动的第三驱动机构。
第三驱动机构包括第三液压缸22,升降板16内固定安装有第三液压缸22,第三液压缸22的活塞杆与第一齿条板19固定安装,货叉17包括竖臂27和前叉30,竖臂27底部固定连接有第二底板28,第二底板28内开设有方槽2801,方槽2801内转动安装有转动板29,转动板29与前叉30固定安装,第二底板28上设有定位机构。
定位机构包括定位球32,转动板29内开设有定位孔2901,第二底板28内开设有缓冲槽2802,缓冲槽2802一端弹性连接有弹簧31,弹簧31的自由端弹性连接有插入定位孔2901的定位球32。
竖臂27上固定安装有第一磁铁33,前叉30上设有与第一磁铁33磁性相异的第二磁铁34,底座1内设有无线传输模块和PLC控制模块,PLC控制模块可以控制第一液压缸6、第二液压缸12和第三液压缸22以及发动机和转向机构,无线传输模块接收和向智能显示终端传输指令,人在智能显示终端上下指令,无线传输模块接收指令将信号传输至PLC控制模块,PLC控制模块控制相应的电气件执行指令,不需要人工上车操作,减轻了工人的工作负担。
启动第一液压缸6的活塞杆缩回,转动块11在固定杆10上转动,驱动框架7向凹槽101内转动,框架7与斜块26接触,此时,框架7收纳在凹槽101内,转动前叉30使前叉30与竖臂27贴紧,第一磁铁33吸住第二磁铁34,将前叉30固定在竖臂27上,将货叉17进行折叠,整体占据较小的空间,避免人员误碰货叉17导致其受伤,提高了使用的安全性。
启动第三液压缸22,带动第一齿条板19运动,通过第一连接块18带动其中一个货叉17运动,根据卡齿的啮合传动原理,驱动第二齿轮23转动,进而驱动第二齿条板21运动,驱动另一个货叉17运动,且第二齿条板21与第一齿条板19的运动方向相反,进而可以调节两个货叉17之间的距离,便于使用。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
Claims (9)
1.一种基于视觉的智能显示终端的机器人装卸系统,包括底座(1)和设置在底座(1)上的前轮(2)和后轮(3),所述底座(1)内设有驱动后轮(3)转动的动力系统,其特征在于,所述底座(1)内开设有凹槽(101),所述凹槽(101)的前端转动安装有框架(7),所述凹槽(101)内设有驱动框架(7)转动折叠的第一驱动机构;
所述框架(7)的前端设有升降板(16),所述升降板(16)上安装有可折叠的货叉(17),所述框架(7)上设有驱动升降板(16)在竖直方向上运动的传动机构,所述凹槽(101)内固定安装有斜块(26)。
2.根据权利要求1所述的一种基于视觉的智能显示终端的机器人装卸系统,其特征在于,所述第一驱动机构包括第一液压缸(6),所述凹槽(101)内固定连接有四个固定座(4),两个所述固定座(4)之间转动安装有第一底板(5),所述第一底板(5)上固定安装有第一液压缸(6),所述第一液压缸(6)的活塞杆上固定连接有转动块(11),所述框架(7)上固定安装有固定板(8),所述固定板(8)两侧固定安装有安装座(9),两个所述安装座(9)之间固定安装有固定杆(10),所述固定杆(10)穿过转动块(11)且与转动块(11)转动安装。
3.根据权利要求2所述的一种基于视觉的智能显示终端的机器人装卸系统,其特征在于,所述传动机构包括第二液压缸(12),所述框架(7)上固定安装有第二液压缸(12),所述第二液压缸(12)的活塞杆上固定安装有支杆(13),所述支杆(13)内开设有安装槽(1301),所述安装槽(1301)内转动安装有第一齿轮(14),所述框架(7)底部固定安装有链条(15),所述链条(15)的另一端与升降板(16)顶部固定安装,所述链条(15)绕过第一齿轮(14)与其啮合连接。
4.根据权利要求3所述的一种基于视觉的智能显示终端的机器人装卸系统,其特征在于,所述升降板(16)上开设有滑动槽(1601),所述货叉(17)上固定连接有在滑动槽(1601)内滑动的滑动块(24),其中一个所述货叉(17)上通过滑动块(24)固定安装有第一连接块(18),所述第一连接块(18)上固定安装有第一齿条板(19),另一个所述货叉(17)上通过滑动块(24)固定安装有第二连接块(20),所述第二连接块(20)上固定安装有第二齿条板(21),所述升降板(16)内固定安装有中心轴(25),所述中心轴(25)上转动安装有第二齿轮(23),所述第二齿轮(23)分别与第一齿条板(19)和第二齿条板(21)啮合连接,所述升降板(16)内设有驱动第二齿轮(23)转动的第三驱动机构。
5.根据权利要求4所述的一种基于视觉的智能显示终端的机器人装卸系统,其特征在于,所述第三驱动机构包括第三液压缸(22),所述升降板(16)内固定安装有第三液压缸(22),所述第三液压缸(22)的活塞杆与第一齿条板(19)固定安装。
6.根据权利要求5所述的一种基于视觉的智能显示终端的机器人装卸系统,其特征在于,所述货叉(17)包括竖臂(27)和前叉(30),所述竖臂(27)底部固定连接有第二底板(28),所述第二底板(28)内开设有方槽(2801),所述方槽(2801)内转动安装有转动板(29),所述转动板(29)与前叉(30)固定安装,所述第二底板(28)上设有定位机构。
7.根据权利要求6所述的一种基于视觉的智能显示终端的机器人装卸系统,其特征在于,所述定位机构包括定位球(32),所述转动板(29)内开设有定位孔(2901),所述第二底板(28)内开设有缓冲槽(2802),所述缓冲槽(2802)一端弹性连接有弹簧(31),所述弹簧(31)的自由端弹性连接有插入定位孔(2901)的定位球(32)。
8.根据权利要求7所述的一种基于视觉的智能显示终端的机器人装卸系统,其特征在于,所述竖臂(27)上固定安装有第一磁铁(33),所述前叉(30)上设有与第一磁铁(33)磁性相异的第二磁铁(34)。
9.根据权利要求8所述的一种基于视觉的智能显示终端的机器人装卸系统,其特征在于,所述底座(1)内设有无线传输模块和PLC控制模块,所述PLC控制模块可控制第一液压缸(6)、第二液压缸(12)和第三液压缸(22)以及发动机和转向机构,所述无线传输模块接收和传输指令,人在智能显示终端上下达指令,所述无线传输模块接收指令将信号传输至PLC控制模块,PLC控制模块控制相应的电气件执行指令。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111308022.0A CN115353034A (zh) | 2021-11-05 | 2021-11-05 | 一种基于视觉的智能显示终端的机器人装卸系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111308022.0A CN115353034A (zh) | 2021-11-05 | 2021-11-05 | 一种基于视觉的智能显示终端的机器人装卸系统 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115353034A true CN115353034A (zh) | 2022-11-18 |
Family
ID=84030768
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111308022.0A Pending CN115353034A (zh) | 2021-11-05 | 2021-11-05 | 一种基于视觉的智能显示终端的机器人装卸系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115353034A (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117720045A (zh) * | 2024-02-07 | 2024-03-19 | 苏州维达奇智能科技有限公司 | 一种用于无人叉车的可调节式的人工智能双叉属具 |
-
2021
- 2021-11-05 CN CN202111308022.0A patent/CN115353034A/zh active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117720045A (zh) * | 2024-02-07 | 2024-03-19 | 苏州维达奇智能科技有限公司 | 一种用于无人叉车的可调节式的人工智能双叉属具 |
| CN117720045B (zh) * | 2024-02-07 | 2024-04-19 | 苏州维达奇智能科技有限公司 | 一种用于无人叉车的可调节式的人工智能双叉属具 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN115353034A (zh) | 一种基于视觉的智能显示终端的机器人装卸系统 | |
| WO2023103674A1 (zh) | Agv叉车 | |
| CN110385727A (zh) | 一种货物转运用机器人 | |
| CN113459072B (zh) | 一种可切换式串并联多臂抓取无人机设计 | |
| EP3668813B1 (en) | Laterally operating payload handling device | |
| CN214456604U (zh) | 一种用于无人叉车的双货叉 | |
| CN211496839U (zh) | 一种智能搬运车 | |
| CN113233383A (zh) | 一种货叉可折叠的叉车 | |
| CN115635500B (zh) | 一种抱夹机构及移车机器人 | |
| CN111776989A (zh) | 一种稳固型建筑用装卸车 | |
| CN106698209A (zh) | 车载吊运装置 | |
| CN216470433U (zh) | 一种集装箱快速装卸搬运装置 | |
| CN213446054U (zh) | 一种新型多功能双向叉车 | |
| CN218025278U (zh) | 一种抱夹式叉车agv | |
| CN216971815U (zh) | 一种随车起吊装置 | |
| CN212832612U (zh) | 举升机构及搬运车 | |
| CN113696813B (zh) | 一种集装箱转运小车的转运方法 | |
| CN218968790U (zh) | 叉车 | |
| CN218145685U (zh) | 一种用于移动机器人上下车的随车叉车 | |
| CN210084142U (zh) | 一种仓储复合机器人的小车 | |
| CN211198503U (zh) | 货叉架组件、叉车门架组件及叉车 | |
| CN2729030Y (zh) | 叉车 | |
| CN213386270U (zh) | 一种货架穿梭小车 | |
| CN214456575U (zh) | 一种改进型升降物流机器人 | |
| CN219058359U (zh) | 一种吊具、起吊装置以及转载运输车 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |