CN115108207A - Unmanned intelligent glass warehouse system - Google Patents
Unmanned intelligent glass warehouse system Download PDFInfo
- Publication number
- CN115108207A CN115108207A CN202210613108.2A CN202210613108A CN115108207A CN 115108207 A CN115108207 A CN 115108207A CN 202210613108 A CN202210613108 A CN 202210613108A CN 115108207 A CN115108207 A CN 115108207A
- Authority
- CN
- China
- Prior art keywords
- glass
- module
- clip
- frame
- warehouse
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000011521 glass Substances 0.000 title claims abstract description 130
- 238000003860 storage Methods 0.000 claims description 83
- 230000007246 mechanism Effects 0.000 claims description 53
- 238000007726 management method Methods 0.000 claims description 47
- 238000003780 insertion Methods 0.000 claims description 28
- 230000037431 insertion Effects 0.000 claims description 28
- 230000005540 biological transmission Effects 0.000 claims description 14
- 238000012544 monitoring process Methods 0.000 claims description 11
- 238000000034 method Methods 0.000 claims description 8
- 230000008569 process Effects 0.000 claims description 8
- 230000003014 reinforcing effect Effects 0.000 claims description 7
- 238000013523 data management Methods 0.000 claims description 6
- 238000001514 detection method Methods 0.000 claims description 6
- 238000004891 communication Methods 0.000 claims description 5
- 239000004984 smart glass Substances 0.000 claims 4
- 230000000694 effects Effects 0.000 abstract description 7
- 238000005516 engineering process Methods 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 6
- 238000013439 planning Methods 0.000 description 4
- 101100408454 Arabidopsis thaliana PLC6 gene Proteins 0.000 description 3
- 101100408456 Arabidopsis thaliana PLC8 gene Proteins 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 3
- 230000007547 defect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 238000012546 transfer Methods 0.000 description 2
- 206010063385 Intellectualisation Diseases 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- 238000004026 adhesive bonding Methods 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000007418 data mining Methods 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000003028 elevating effect Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 230000006855 networking Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 239000003351 stiffener Substances 0.000 description 1
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65D—CONTAINERS FOR STORAGE OR TRANSPORT OF ARTICLES OR MATERIALS, e.g. BAGS, BARRELS, BOTTLES, BOXES, CANS, CARTONS, CRATES, DRUMS, JARS, TANKS, HOPPERS, FORWARDING CONTAINERS; ACCESSORIES, CLOSURES, OR FITTINGS THEREFOR; PACKAGING ELEMENTS; PACKAGES
- B65D85/00—Containers, packaging elements or packages, specially adapted for particular articles or materials
- B65D85/30—Containers, packaging elements or packages, specially adapted for particular articles or materials for articles particularly sensitive to damage by shock or pressure
- B65D85/48—Containers, packaging elements or packages, specially adapted for particular articles or materials for articles particularly sensitive to damage by shock or pressure for glass sheets
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06K—GRAPHICAL DATA READING; PRESENTATION OF DATA; RECORD CARRIERS; HANDLING RECORD CARRIERS
- G06K17/00—Methods or arrangements for effecting co-operative working between equipments covered by two or more of main groups G06K1/00 - G06K15/00, e.g. automatic card files incorporating conveying and reading operations
- G06K17/0022—Methods or arrangements for effecting co-operative working between equipments covered by two or more of main groups G06K1/00 - G06K15/00, e.g. automatic card files incorporating conveying and reading operations arrangements or provisions for transferring data to distant stations, e.g. from a sensing device
- G06K17/0029—Methods or arrangements for effecting co-operative working between equipments covered by two or more of main groups G06K1/00 - G06K15/00, e.g. automatic card files incorporating conveying and reading operations arrangements or provisions for transferring data to distant stations, e.g. from a sensing device the arrangement being specially adapted for wireless interrogation of grouped or bundled articles tagged with wireless record carriers
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/08—Logistics, e.g. warehousing, loading or distribution; Inventory or stock management
- G06Q10/087—Inventory or stock management, e.g. order filling, procurement or balancing against orders
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
Landscapes
- Engineering & Computer Science (AREA)
- Business, Economics & Management (AREA)
- Economics (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Mechanical Engineering (AREA)
- Development Economics (AREA)
- Marketing (AREA)
- Finance (AREA)
- General Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Entrepreneurship & Innovation (AREA)
- Human Resources & Organizations (AREA)
- Accounting & Taxation (AREA)
- Operations Research (AREA)
- Quality & Reliability (AREA)
- Strategic Management (AREA)
- Tourism & Hospitality (AREA)
- General Business, Economics & Management (AREA)
- Warehouses Or Storage Devices (AREA)
Abstract
The invention provides an unmanned intelligent glass warehouse system, which solves the problems of glass warehouse management and the like and comprises a stereoscopic warehouse, wherein the stereoscopic warehouse is provided with a transport RGV and an intelligent control system, the intelligent control system is provided with a WMS system, the WMS system is connected with an RCS system and a WCS system, the RCS system is connected with a PDA module, and the WCS system is connected with a slave station PLC through a PLC automatic control system. The invention has the advantages of good management effect, stable operation and the like.
Description
Technical Field
The invention belongs to the technical field of intelligent warehouses, and particularly relates to an unmanned intelligent glass warehouse system.
Background
The intelligent storage is a link in the logistics process, and the application of the intelligent storage ensures the speed and the accuracy of data input in each link of goods warehouse management, ensures that enterprises timely and accurately master real data of the inventory, and reasonably keeps and controls the inventory of the enterprises. Through scientific coding, the batch, the shelf life and the like of the inventory goods can be conveniently managed. By utilizing the function of warehouse location management, the current positions of all the stored goods can be mastered in time, and the working efficiency of warehouse management is improved. The modern warehousing system is not only complex in internal articles, different in shape and performance, but also complex in operation flow, not only storing, but also moving, sorting and combining. Therefore, the intelligent logistics center with warehousing as the core often adopts intelligent technologies such as an automatic control technology, an intelligent robot stacking technology, an intelligent information management technology, a mobile computing technology, a data mining technology and the like. The biggest trend of modern logistics is networking and intellectualization. In a manufacturing enterprise, a modern storage distribution center is often fused with an enterprise production system, and the storage system plays a very important role in enterprise production management as a part of the production system. However, in practical applications, the existing glass warehousing system cannot achieve better classification of glass. In addition, for the storage management of large-batch glass, the existing MES system or ERP system has unclear control hierarchy division of the storage management, and the responsibility of each module is unclear, so that the storage management effect is poor.
In order to solve the defects of the prior art, people have long searched for and put forward various solutions. For example, the chinese patent document discloses a multi-station vertical glass smart storage system [201420225252.X ], which comprises a base, a gantry and a transfer rack, wherein the surface of the base is provided with at least two guide rails, and the surface of the base is provided with storage racks at intervals; the lower ends of two sides of the portal frame are respectively arranged on the guide rails, and the portal frame can be longitudinally and movably arranged along the guide rails; the portal frame is hung with a mechanical arm which can be transversely and movably arranged on the portal frame.
The scheme solves the problem of glass storage classification to a certain extent, but the scheme still has a plurality of defects, such as poor storage management effect and the like.
Disclosure of Invention
The invention aims to solve the problems and provides an unmanned intelligent glass warehouse system which is reasonable in design and good in warehouse management effect.
In order to achieve the purpose, the invention adopts the following technical scheme: the unmanned intelligent glass warehouse system comprises a stereoscopic warehouse, wherein the stereoscopic warehouse is provided with a conveying RGV and an intelligent control system, the intelligent control system is provided with a WMS system, the WMS system is connected with an RCS system and a WCS system, the RCS system is connected with a PDA module, and the WCS system is connected with a slave station PLC through a PLC automatic control system. The WMS system in the stereoscopic warehouse is used for information management and task allocation planning, the RCS system is used for forklift management and task planning, workers are guided to operate the forklift to deliver glass through the PDA module, and the WCS system is used for warehouse scheduling, forms a control system which is clear in hierarchy, clear in responsibility, completely independent of MES or ERP, and has a good warehouse management effect.
In the above unmanned intelligent glass warehouse system, the stereoscopic warehouse comprises stereoscopic storage shelves and glass supports placed on the stereoscopic storage shelves, a tunnel for transporting the RGV is left between the stereoscopic storage shelves, and the transporting RGV is equipped with a glass forklift; the conveying RGV comprises a lifting shuttle car arranged on a roadway and an in-out warehouse conveyor arranged on one side of the glass support, wherein the lifting shuttle car is provided with a piece taking mechanism opposite to the glass support, each roadway is provided with two lifting shuttle cars, and the in-out warehouse conveyor is connected with a glass forklift; the tunnel port is closed by the emergency exit, and the emergency exit is equipped with sensor and emergency stop button, and emergency stop button is connected with the lift shuttle. Stereoscopic warehouse passes through stereoscopic storage goods shelves and glass support storage glass, and the lift shuttle removes in the tunnel and transfers glass to the warehouse entry conveyer fast, and a plurality of lift shuttle synchronous working for stereoscopic warehouse has higher glass access efficiency.
In the unmanned intelligent glass warehouse system, the three-dimensional storage shelf is of a rectangular frame structure, the three-dimensional storage shelf is of a multilayer structure, a plurality of storage positions are divided in each layer, a goods rod used for bearing a glass frame body is arranged on the upper layer of the three-dimensional storage shelf, a reinforcing rod is connected between the upper ends of the adjacent three-dimensional storage shelves, a plurality of glass supports are fixed in each storage position, and the sizes of glass stored by the glass supports are the same; the glass support comprises a base and a support frame arranged at the upper end of the base, and the base is connected with the support frame through a sliding insertion mechanism; the base comprises a plurality of sub-base bodies which are arranged at equal intervals, each sub-base body is provided with a bottom plate and a vertical plate which is vertically arranged at the upper end of the bottom plate, and the cross section of each vertical plate is H-shaped and is integrally formed with the bottom plate; the support frame comprises cross rods which are arranged in parallel, a plurality of brackets which are arranged at equal intervals are fixed between the cross rods, the brackets are L-shaped and are provided with long rods and short rods which are mutually and vertically connected, the lower ends of the brackets are fixed with the cross rods, and horizontally arranged support cross rods and obliquely arranged support oblique rods are connected between the brackets which are arranged adjacently; the sliding insertion mechanism comprises insertion blocks arranged on two sides of the upper end of the base, an insertion strip with an L-shaped section is fixed at the lower end of the support frame, and an insertion groove for inserting the insertion blocks is reserved between the insertion strip and the lower end of the support frame. The three-dimensional storage shelf and the glass support are respectively provided with corresponding reinforcing structures to ensure the structural stability of the shelf, and the sliding insertion mechanism can realize the synchronous drawing of the bracket and the glass.
In the above unmanned intelligent glass warehouse system, the lifting shuttle comprises a main vehicle body, the main vehicle body is provided with a guide rail mechanism, and the sheet taking mechanism is installed on the main vehicle body; the sheet taking mechanism comprises a lifting mechanism arranged on the main vehicle body, and the lifting mechanism is provided with a sheet clamping mechanism; the guide rail mechanism comprises a driving guide rail assembly arranged between the lower end of the main vehicle body and the roadway and a limiting guide rail assembly arranged between the upper end of the main vehicle body and the three-dimensional storage shelf; the driving guide rail assembly comprises a plurality of lower guide rails which are arranged on a roadway in parallel, the lower end of the main vehicle body is rotatably provided with a plurality of pulleys which are attached to the lower guide rails through a rotating seat, and the pulleys are connected with a sliding driving motor through a transmission shaft; the limiting guide rail assembly comprises a plurality of upper guide rails which are arranged on the upper end of the three-dimensional storage shelf in parallel, and a plurality of pulleys attached to the upper guide rails are rotatably arranged at the upper end of the main car body through a rotating seat. The lifting shuttle car moves along a roadway fixed track through the guide rail assembly, and the upper guide rail and the lower guide rail play a guiding role to ensure that the lifting shuttle car runs stably.
In foretell intelligent glass warehouse system of unmanned formula, main automobile body includes horizontal car frame and the vertical car frame of vertical fixing on horizontal car frame, and vertical car frame extends to three-dimensional storage goods shelves upper end, and horizontal car frame and vertical car frame have a plurality of structure poles respectively, and the width of horizontal car frame and vertical car frame is less than the tunnel width. And the vertical frame and the horizontal frame of the main vehicle body are welded and fixed.
In foretell intelligent glass warehouse system of unmanned formula, elevating system is including arranging the lifting support body that just is located vertical car frame one side on the main automobile body, lifting support body has horizontal support body relative with horizontal car frame and the vertical support body relative with vertical car frame, horizontal support body upper end is fixed with places the board, it distributes along circumference range and has the piece of gluing to place the board, the lower extreme rotates through the roating seat respectively and installs the sprocket and the sprocket passes through chain drive and connects on the vertical car frame, one of them sprocket is connected with elevator motor and elevator motor is fixed with the main automobile body, chain and vertical support body fixed connection, be provided with between vertical support body and the vertical car frame along vertical direction extension and sliding connection's lift guide rail and lift slider. The lifting mechanism realizes the up-and-down lifting of the lifting frame body in a chain wheel transmission mode, so that the clamping piece mechanism can access the glass sheets stored in the upper three-dimensional storage shelf, and the height of the main vehicle body is consistent with the height of the three-dimensional storage shelf.
In foretell an unmanned intelligent glass warehouse system, clamping piece mechanism is including installing the clamping piece strip on vertical support body, the clamping piece strip has the clamping groove along axial extension, clamping piece groove both ends are rotated respectively and are installed clamping piece band pulley and pass through clamping piece area body transmission and connect, one of them clamping piece band pulley is connected with the clamping piece motor and the clamping piece motor is fixed with the lift support body, be fixed with the clamping piece pedestal on the clamping piece area body, be provided with sliding connection's clamping piece guide rail and clamping piece slider between the lower extreme on clamping piece pedestal and the clamping piece strip respectively, be fixed with the clamping piece cylinder on the clamping piece pedestal, clamping piece cylinder output end is fixed with splint and the splint both ends are fixed with the glued piece, the glass stand has the arm-tie that supplies the gluey piece grafting on the splint. The clamping piece mechanism realizes the movement of the clamping piece base body through the transmission of the belt wheel, so that the clamping plate connected with the clamping piece cylinder is connected with the pulling plate to realize the extraction of the glass.
In the above unmanned intelligent glass warehouse system, the stereoscopic storage shelf comprises a first shelf and a second shelf, and the glass support comprises a first glass rack placed on the first shelf and a second glass rack placed on the second shelf; the first goods shelves have two layers and every check storage bit deposits 5 first glass framves, and the second goods shelves have three layers and every check storage bit deposits 6 second glass framves, and first goods shelves and second goods shelves height equals. The stereoscopic storage shelf is assembled in the warehouse in a unified way by selecting proper specifications according to needs, so that the stereoscopic storage shelf meets the storage requirements of glass with different specifications.
In the above unmanned intelligent glass warehouse system, the WMS system comprises a base module and a customization module; the basic module comprises a basic data management module, an equipment management module, an inventory state statistics query module, an equipment monitoring module, an in-out inventory management module and a bar code and RFID management module; the customization module comprises a work rule management module, a logistics process management module, a real-time monitoring module and a communication interface module.
In the above unmanned intelligent glass warehouse system, the WCS system includes an operation log module, an equipment detection module, an operation query module, an exception handling module, and a task execution module; the automatic PLC control system selects Siemens PLC as a core controller, the automatic PLC control system selects ET200SP as a slave station PLC, the automatic PLC control system selects a frequency converter to drive the conveyor, the automatic PLC control system is provided with a high-precision sensor, the automatic PLC control system is provided with an ID reader opposite to the glass support, and the automatic PLC control system is provided with a touch display screen; the RCS system is connected with the PDA module through a wireless local area network based on TCP/IP, and the PDA module is vehicle-mounted or handheld. And the PLC automatic control system is responsible for the execution of each slave station PLC, so that the automatic control of the warehouse system is realized.
Compared with the prior art, the invention has the advantages that: the WMS system, the RCS system and the WCS system are matched to realize the hierarchical division of the storage system, so that the storage management effect is improved; the stereoscopic storage shelf selects proper specifications as required and is suitable for the storage of glass with different specifications; the PLC automatic control system is matched with the slave station PLC to realize independent control of each working module and guarantee the stability of glass access.
Drawings
FIG. 1 is a block diagram of the present invention;
fig. 2 is a schematic view of the construction of the stereoscopic warehouse of the present invention;
FIG. 3 is a schematic view of the first shelf of the present invention;
FIG. 4 is a schematic view of the structure of a second shelf of the present invention;
fig. 5 is a schematic diagram of the planning of a stereoscopic warehouse of the present invention;
fig. 6 is a schematic structural view of a stereoscopic warehouse of the present invention;
FIG. 7 is a schematic view of the structure of the three-dimensional storage shelf of the present invention;
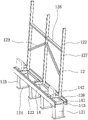
FIG. 8 is a schematic structural view of a glass holder of the present invention;
FIG. 9 is a schematic structural view from another perspective of the glass holder of the present invention;
FIG. 10 is a schematic structural view of the lift shuttle of the present invention;
FIG. 11 is a schematic structural view from another perspective of the lift shuttle of the present invention;
fig. 12 is a partial schematic view of the lift shuttle of the present invention;
in the figure, the stereoscopic warehouse 1, the stereoscopic storage shelf 11, the cargo bar 111, the reinforcing bar 112, the first shelf 113, the second shelf 114, the first glass frame 115, the second glass frame 116, the glass support 12, the base 121, the support frame 122, the sub-base 123, the bottom plate 124, the vertical plate 125, the cross bar 126, the bracket 127, the support cross bar 128, the support diagonal bar 129, the lifting shuttle 13, the main car body 131, the horizontal car frame 132, the vertical car frame 133, the structural bar 134, the sliding insertion mechanism 14, the insertion block 141, the insertion strip 142, the insertion groove 143, the guide rail mechanism 15, the lower guide rail 151, the transmission shaft 152, the sliding driving motor 153, the upper guide rail 154, the lifting mechanism 16, the lifting frame body 161, the horizontal frame body 162, the vertical frame body 163, the placing plate 164, the chain 165, the lifting motor 166, the chain 167, the lifting guide rail 168, the lifting slider 169, the clip mechanism 17, the clip strip 171, the clip groove 172, the clip 173, the pulley 173, the clip mechanism, The system comprises a clip belt body 174, a clip motor 175, a clip seat body 176, a clip guide rail 177, a clip slider 178, a clip cylinder 179, a roadway 18, an emergency gate 181, an in-out warehouse conveyor 182, a glass forklift 183, a handling RGV2, a WMS system 3, a base module 31, a base data management module 311, an equipment management module 312, an inventory state statistics query module 313, an equipment monitoring module 314, an in-out warehouse inventory management module 315, a bar code and RFID management module 316, a customization module 32, a work rule management module 321, a logistics process management module 322, a real-time monitoring module 323, a communication interface module 324, an RCS system 4, a WCS system 5, an operation log module 51, an equipment detection module 52, an operation query module 53, an exception processing module 54, a task execution module 55, a PDA module 6, a PLC automatic control system 7 and a slave station 8.
Detailed Description
The invention is described in further detail below with reference to the drawings and the detailed description.
As shown in fig. 1 to 12, an unmanned intelligent glass warehouse system comprises a stereoscopic warehouse 1, the stereoscopic warehouse 1 is provided with a carrying RGV2 and an intelligent control system, the intelligent control system comprises a WMS system 3, the WMS system 3 is connected with an RCS system 4 and a WCS system 5, the RCS system 4 is connected with a PDA module 6, and the WCS system 5 is connected with a slave station PLC8 through a PLC automatic control system 7. The conveying RGV2 is a rail guided vehicle for conveying glass to realize glass access in the stereoscopic warehouse 1, and is usually driven by an electric motor and controlled by an intelligent control system. The WMS system 3 is a warehouse management system and is widely applied to the manufacturing industry, the distribution industry and the public warehouse business, the WMS system is used as a core part of the whole intelligent control system and mainly solves the problem of ' why ' and ' what ' to do ', the RCS system 4 is a reaction control system, the WCS system 5 is a warehouse control system and performs management control between the WMS system 3 and the PLC automatic control system 7, tasks are decomposed and sent to the slave station PLCs 8, the RCS system 4 performs feedback and mainly solves the problem of ' how to do ', and the PLC automatic control system 7 is responsible for automatically executing each action.
Specifically, the stereoscopic warehouse 1 comprises stereoscopic storage shelves 11 and glass supports 12 placed on the stereoscopic storage shelves 11, a roadway 18 for moving a conveying RGV2 is reserved between the stereoscopic storage shelves 11, and a conveying RGV2 is provided with a glass forklift 183; the conveying RGV2 comprises a lifting shuttle car 13 arranged on the roadway 18 and an in-out warehouse conveyor 182 arranged on one side of the glass support 12, wherein the lifting shuttle car 13 is provided with a sheet taking mechanism opposite to the glass support 12, each roadway 18 is provided with two lifting shuttle cars 13, and the in-out warehouse conveyor 182 is connected with a glass forklift 183; the port of the tunnel 18 is closed by a safety door 181, the safety door 181 is equipped with a sensor and an emergency stop button, and the emergency stop button is connected with the lifting shuttle 13. The safety door 181 is at least 1.8 m high, and adopts a 3t steel mesh with 25 x 50mm holes. A plurality of three-dimensional storage shelves 11 are arranged, a channel reserved between the three-dimensional storage shelves is used as a tunnel 18 for carrying RGV2 to move, the lifting shuttle cars 13 move in the tunnel 18, two lifting shuttle cars 13 are arranged to facilitate the two ends of the tunnel 18 to respectively store and take glass, the warehouse-in and warehouse-out conveyor 182 is arranged between the ports of the tunnel 18 and used for intensively transferring glass sheets to a glass forklift 183 and uniformly delivering the glass sheets out of the warehouse by the glass forklift 183. The travel distance of the lifting shuttle 13 is about 120 meters, the lifting distance is about 6.5 meters, and the load is 4000 kg. The single lift shuttle 13 has an operating capacity of 25-30 glass racks 12 per hour, either manually, stand-alone automatically or automatically by the online WMS system 3. Each lane 18 reaches 50-60 times of warehouse entry and exit per hour, so two lifting shuttle vehicles 13 are required to be configured. The WMS system 3 evenly distributes glass of the same specification to each lane 18, ensures that any lane has any kind of goods, and ensures that the failure of the lifting shuttle 13 does not affect the shipment.
Deeply, the three-dimensional storage shelf 11 is of a rectangular frame structure, the three-dimensional storage shelf 11 is of a multilayer structure, a plurality of storage positions are divided on each layer, a goods rod 111 for bearing a glass shelf body is arranged on the upper layer of the three-dimensional storage shelf 11, a reinforcing rod 112 is connected between the upper ends of the adjacent three-dimensional storage shelves 11, a plurality of glass supports 12 are fixed in each storage position, and the glass specifications stored by the glass supports 12 are the same; the glass support 12 comprises a base 121 and a support frame 122 installed at the upper end of the base 121, wherein the base 121 is connected with the support frame 122 through a sliding insertion mechanism 14; the base 121 comprises a plurality of sub-base bodies 123 arranged at equal intervals, each sub-base body 123 is provided with a bottom plate 124 and a vertical plate 125 vertically arranged at the upper end of the bottom plate 124, and the cross section of each vertical plate 125 is H-shaped and is integrally formed with the bottom plate 124; the supporting frame 122 comprises cross bars 126 which are arranged in parallel, a plurality of brackets 127 which are arranged at equal intervals are fixed between the cross bars 126, the brackets 127 are L-shaped and are provided with long bars and short bars which are connected with each other vertically, the lower ends of the brackets 127 are fixed with the cross bars 126, and horizontally arranged supporting cross bars 128 and obliquely arranged supporting oblique bars 129 are connected between the adjacent brackets 127; the sliding insertion mechanism 14 includes insertion blocks 141 disposed on two sides of the upper end of the base 121, an insertion strip 142 having an L-shaped cross section is fixed to the lower end of the supporting frame 122, and an insertion groove 143 for inserting the insertion block 141 is left between the insertion strip 142 and the lower end of the supporting frame 122. The goods rod 111 and the reinforcing rod 112 are arranged between the three-dimensional storage shelves 11 and inside the three-dimensional storage shelves 11 and used for keeping the stability of the frame structure of the three-dimensional storage shelves 11, the base 121 of the glass support 12 is kept fixed, the bracket 127 at the upper end is of a movable structure, relative positioning and installation are achieved through the insertion groove 143 into which the insertion block 141 is inserted, and the bracket 127 is obliquely arranged to ensure that glass is placed stably.
Further, the lifting shuttle 13 comprises a main vehicle body 131, the main vehicle body 131 is provided with a guide rail mechanism 15, and the sheet taking mechanism is installed on the main vehicle body 131; the sheet taking mechanism comprises a lifting mechanism 16 arranged on the main vehicle body 131, and the lifting mechanism 16 is provided with a sheet clamping mechanism 17; the guide rail mechanism 15 comprises a driving guide rail assembly arranged between the lower end of the main vehicle body 131 and the roadway 18 and a limiting guide rail assembly arranged between the upper end of the main vehicle body 131 and the stereoscopic storage shelf 11; the driving guide rail assembly comprises a plurality of lower guide rails 151 which are arranged on the roadway 18 in parallel, a plurality of pulleys which are attached to the lower guide rails 151 are rotatably arranged at the lower end of the main vehicle body 131 through a rotating seat, and the pulleys are connected with a sliding driving motor 153 through a transmission shaft 152; the limiting guide rail assembly comprises a plurality of upper guide rails 154 which are arranged at the upper end of the three-dimensional storage shelf 11 in parallel, and a plurality of pulleys attached to the upper guide rails 154 are rotatably arranged at the upper end of the main car body 131 through a rotating seat. The main body 131 is provided with a rail mechanism 15 which is mounted on the floor of the tunnel 18 and on the reinforcing bar 112 to ensure the stability of the upper and lower ends of the main body 131 during movement. The transmission shaft 152 is driven to rotate by a pulley through variable speed transmission by a slide driving motor 153 to provide a driving torque to the main body 131, the pulley at the upper end of the main body 131 does not provide a driving force, and the lower guide rail 151 and the upper guide rail 154 are parallel to each other.
Further, the main vehicle body 131 includes a horizontal vehicle frame 132 and a vertical vehicle frame 133 vertically fixed on the horizontal vehicle frame 132, the vertical vehicle frame 133 extends to the upper end of the stereoscopic storage shelf 11, the horizontal vehicle frame 132 and the vertical vehicle frame 133 respectively have a plurality of structural rods 134, and the widths of the horizontal vehicle frame 132 and the vertical vehicle frame 133 are smaller than the width of the roadway 18. The structural rod 134 is disposed horizontally or vertically in the horizontal frame 132 and the vertical frame 133, and serves as a mounting base of the lifting mechanism 16, while improving the structural strength of the main vehicle body 131, ensuring that it can withstand heavy glass handling. The lifting shuttle 13 has various operation modes such as manual operation, semi-automatic operation, full-automatic online operation, safe operation and the like. As long as the motor is not damaged, even if the semi-automatic and full-automatic online modes cannot be used, the glass can be taken down from the shelf through the manual button.
Besides, the lifting mechanism 16 includes a lifting frame body 161 arranged on the main vehicle body 131 and located on one side of the vertical vehicle frame 133, the lifting frame body 161 has a horizontal frame body 162 opposite to the horizontal vehicle frame 132 and a vertical frame body 163 opposite to the vertical vehicle frame 133, a placing plate 164 is fixed on the upper end of the horizontal frame body 162, rubber blocks are distributed on the placing plate 164 along the circumferential direction, a chain wheel 165 is rotatably mounted on the upper end and the lower end of the vertical vehicle frame 133 through a rotating seat respectively, the chain wheel 165 is in transmission connection with the chain wheel 165 through a chain 167, one of the chain wheels 165 is connected with a lifting motor 166, the lifting motor 166 is fixed with the main vehicle body 131, the chain 167 is fixedly connected with the vertical frame body 163, and a lifting guide rail 168 and a lifting slider 169 extending in the vertical direction and in sliding connection are arranged between the vertical frame body 163 and the vertical vehicle frame 133.
Meanwhile, the clip mechanism 17 includes a clip strip 171 installed on the vertical frame body 163, the clip strip 171 has a clip groove 172 extending along the axial direction, two ends of the clip groove 172 are respectively rotatably installed with a clip belt wheel 173 and the clip belt wheel 173 is in transmission connection through a clip belt body 174, one of the clip belt wheels 173 is connected with the clip motor 175 and the clip motor 175 is fixed with the lifting frame body 161, a clip base 176 is fixed on the clip belt body 174, a clip guide rail 177 and a clip slider 178 which are in sliding connection are respectively arranged between the clip base 176 and the upper end and the lower end of the clip strip 171, a clip cylinder 179 is fixed on the clip base 176, a clip is fixed at the output end of the clip cylinder 179 and two ends of the clip are fixed with rubber blocks, and the glass support 12 has a pulling plate for the rubber blocks on the clip to be inserted and connected. After the clip motor 175 is started, the clip belt 174 is driven by the clip belt wheel 173 to rotate in two directions, so that the clip mechanism 17 takes clips in two directions, and the clip cylinder 179 drives the clamping plate to move in a telescopic manner, so that the clamping plate and the pulling plate are locked or unlocked quickly.
Visibly, the stereoscopic storage shelf 11 includes a first shelf 113 and a second shelf 114, and the glass stand 12 includes a first glass shelf 115 placed on the first shelf 113 and a second glass shelf 116 placed on the second shelf 114; the first shelf 113 has two layers and stores 5 first glass frames 115 per storage position, the second shelf 114 has three layers and stores 6 second glass frames 116 per storage position, and the first shelf 113 and the second shelf 114 are equal in height. The first glass frame 115 is adapted to glass with a height of 1524 and 2438mm, a width of 930mm at most and a thickness of 180mm at most. The second glass frame 116 is adapted to have a glass height of 1219-. The stored glass has a physical dimension not greater than the physical dimension of the glass shelf.
Preferably, the stereoscopic warehouse has 5 lanes 18 and 10 rows of stereoscopic storage shelves 11, wherein 2 lanes 18 are first shelves 113 and 3 lanes 18 are second shelves 114; the first shelf 113 has 36 rows of 2 layers, has a length of 117 + 119 meters, a height of 9.5-10 meters and a width of 3200 + 3300 millimeters, has 72 storage positions and stores 360 first glass shelves 115; the second shelf 114 has 34 rows of 3 layers, has a length of 116-; the stereoscopic warehouse occupies 120 × 40 meters or 120 × 60 meters as a whole. The average storage utilization rate is 85%, and the average storage is 9570 t. The total first rack 113 area is approximately 1368 square meters, the rack mass is 350t, the 1400 first glass racks 115 mass is 280t, the maximum glass storage is 4636t, and the total is 5266 t. The ground is loaded with 3.84 t/square meter and the concentrated load of the column feet of the goods shelf is about 8 t. The area of all the second shelves 114 is about 1170 square meters, the shelf weight is 400t, the weight of 3672 second glass shelves 116 is 367t, the maximum storage capacity of glass is 6490t, 7257t in total, the ground is loaded with 6.20t per square meter, and the concentrated load of the column feet of the shelves is about 8 t. In actual use, the area of the column foot area is increased to disperse concentrated loads, and specific design needs to be determined after site investigation.
It is clear that WMS system 3 comprises a base module 31 and a customization module 32; the basic module 31 comprises a basic data management module 311, a device management module 312, an inventory status statistics query module 313, a device monitoring module 314, an in-out inventory management module 315 and a barcode and RFID management module 316; the customizing module 32 includes a work rule managing module 321, a logistics process managing module 322, a real-time monitoring module 323, and a communication interface module 324. The basic data management module 311 includes cargo type management, personnel management, role assignment, log management, and the like. The device management module 312 includes device registration, device status, device maintenance records, device alarms, and device KPI analysis. The operation rule management module 321 includes rule setting, modification and deletion, the logistics process management module 322 includes logistics configuration and modification, and the real-time monitoring module 323 is used to display the ID and storage location of the glass rack 12. WMS system 3 can receive either ERP sales orders or MES production orders and can also send inventory data to ERP or MES, such as glass specifications, quantities, rack IDs and other data.
Preferably, the WCS system 5 includes an operation log module 51, a device detection module 52, a job query module 53, an exception handling module 54, and a task execution module 55; the PLC automatic control system 7 selects Siemens PLC as a core controller, the PLC automatic control system 7 selects ET200SP as a slave station PLC8, the PLC automatic control system 7 selects a frequency converter to drive a conveyor, the PLC automatic control system 7 is provided with a high-precision sensor, the PLC automatic control system 7 is provided with an ID reader opposite to the glass support 12, and the PLC automatic control system 7 is provided with a touch display screen; the RCS system 4 is connected with the PDA module 6 through a wireless local area network based on TCP/IP, and the PDA module 6 is carried by a vehicle or held by a hand. The log module 51 writes all the task and equipment operation instructions, as well as feedback, into the log, and the maintenance personnel can find the cause of the anomaly by analyzing the data. The device detection module 52 monitors all tasks of all active devices, the current device. The job query module 53 queries tasks, jobs, instruction codes, and the like, queries related task information according to a task number, an entry/exit type, and the like, and also has a query instruction queue by a device number, a task number, time, and the like. The exception handling module 54 first automatically handles the exception when it occurs, with some exceptions being prompted by the system to the user and how to handle them. The task execution module 55 is a background execution module, and completes scheduling of the conveyor, the robot, the shuttle, and other devices according to a process flow predetermined on site.
In summary, the principle of the present embodiment is: the three-dimensional warehouse 1 is internally provided with a conveying RGV2 and is controlled by an intelligent control system to carry out goods dispatching, the WMS system 3 is used for information management and task allocation planning, the WCS system 5 is used for warehouse scheduling, and the RCS system 4 guides workers to operate a glass forklift 183 to distribute glass to a specified roadway 18 through a PDA module 6, so that a system with a good warehouse management effect is formed.
The specific embodiments described herein are merely illustrative of the spirit of the invention. Various modifications or additions may be made to the described embodiments or alternatives may be employed by those skilled in the art without departing from the spirit or ambit of the invention as defined in the appended claims.
Although the stereoscopic warehouse 1, the stereoscopic storage shelf 11, the cargo bar 111, the stiffener 112, the first shelf 113, the second shelf 114, the first glass frame 115, the second glass frame 116, the glass support 12, the base 121, the support frame 122, the sub-frame 123, the bottom plate 124, the vertical plate 125, the cross bar 126, the bracket 127, the support cross bar 128, the support diagonal bar 129, the lift shuttle 13, the main car body 131, the horizontal car frame 132, the vertical car frame 133, the structural bar 134, the slide plug-in mechanism 14, the plug-in block 141, the plug-in strip 142, the plug-in groove 143, the rail mechanism 15, the lower rail 151, the transmission shaft 152, the slide driving motor 153, the upper rail 154, the lifting mechanism 16, the lifting frame body 161, the horizontal frame body 162, the vertical frame body 163, the placement plate 164, the sprocket 165, the lifting motor 166, the chain 167, the lifting rail 168, the lifting slider 169, the mechanism 17, the clip strip 171, the clip groove 172, the clip groove 169, the second shelf 114, the vertical frame 116, the vertical frame 13, the clip 168, the clip mechanism 125, the clip strip, the clip mechanism 125, the clip, A clip belt wheel 173, a clip belt body 174, a clip motor 175, a clip seat body 176, a clip guide rail 177, a clip slider 178, a clip cylinder 179, a tunnel 18, a safety door 181, an in-out warehouse conveyor 182, a glass forklift 183, a carrying RGV2, a WMS system 3, a basic module 31, a basic data management module 311, an equipment management module 312, an inventory status statistics query module 313 and an equipment monitoring module 314, the terms of the warehouse entry and exit inventory management module 315, the barcode and RFID management module 316, the customization module 32, the work rule management module 321, the logistics process management module 322, the real-time monitoring module 323, the communication interface module 324, the RCS system 4, the WCS system 5, the operation log module 51, the equipment detection module 52, the job inquiry module 53, the exception handling module 54, the task execution module 55, the PDA module 6, the PLC automatic control system 7, the slave PLC8, etc., but do not exclude the possibility of using other terms. These terms are used merely to more conveniently describe and explain the nature of the present invention; they are to be construed as being without limitation to any additional limitations that may be imposed by the spirit of the present invention.
Claims (10)
1. The unmanned intelligent glass warehouse system comprises a stereoscopic warehouse (1), wherein the stereoscopic warehouse (1) is provided with a conveying RGV (2) and an intelligent control system, and is characterized in that the intelligent control system is provided with a WMS (wireless remote sensing) system (3), the WMS system (3) is connected with an RCS (remote control system) system (4) and a WCS (wireless control system) system (5), the RCS system (4) is connected with a PDA (personal digital assistant) module (6), and the WCS system (5) is connected with a slave station PLC (8) through a PLC automatic control system (7).
2. The unmanned smart glass warehouse system according to claim 1, wherein the stereoscopic warehouse (1) comprises stereoscopic storage shelves (11) and glass holders (12) placed on the stereoscopic storage shelves (11), a tunnel (18) for moving the conveying RGV (2) is left between the stereoscopic storage shelves (11), and the conveying RGV (2) is equipped with a glass forklift (183); the conveying RGV (2) comprises lifting shuttle cars (13) arranged on roadways (18) and an in-out warehouse conveyor (182) arranged on one side of a glass support (12), wherein a sheet taking mechanism opposite to the glass support (12) is arranged on the lifting shuttle cars (13), each roadway (18) is provided with two lifting shuttle cars (13), and the in-out warehouse conveyor (182) is connected with a glass forklift (183); the port of the roadway (18) is sealed by a safety door (181), the safety door (181) is provided with a sensor and an emergency stop button, and the emergency stop button is connected with the lifting shuttle (13).
3. The unmanned intelligent glass warehouse system of claim 2, wherein the three-dimensional storage shelf (11) is of a rectangular frame structure, the three-dimensional storage shelf (11) is of a multilayer structure, a plurality of storage positions are divided in each layer, a goods rod (111) for bearing glass frame bodies is arranged on the upper layer of the three-dimensional storage shelf (11), a reinforcing rod (112) is connected between the upper ends of adjacent three-dimensional storage shelves (11), a plurality of glass supports (12) are fixed in each storage position, and the glass specifications stored by the glass supports (12) are the same; the glass support (12) comprises a base (121) and a support frame (122) arranged at the upper end of the base (121), wherein the base (121) is connected with the support frame (122) through a sliding insertion mechanism (14); the base (121) comprises a plurality of sub-base bodies (123) which are arranged at equal intervals, each sub-base body (123) is provided with a bottom plate (124) and a vertical plate (125) which is vertically arranged at the upper end of the bottom plate (124), and the cross section of each vertical plate (125) is H-shaped and is integrally formed with the bottom plate (124); the support frame (122) comprises cross bars (126) which are arranged in parallel, a plurality of brackets (127) which are arranged at equal intervals are fixed between the cross bars (126), the brackets (127) are L-shaped and are provided with long bars and short bars which are connected in a mutually vertical way, the lower ends of the brackets (127) are fixed with the cross bars (126), and horizontally arranged support cross bars (128) and obliquely arranged support oblique bars (129) are connected between the adjacent brackets (127); the sliding insertion mechanism (14) comprises insertion blocks (141) arranged on two sides of the upper end of the base (121), an insertion strip (142) with an L-shaped section is fixed at the lower end of the support frame (122), and an insertion groove (143) for inserting the insertion blocks (141) is reserved between the insertion strip (142) and the lower end of the support frame (122).
4. The unmanned intelligent glass warehouse system of claim 2, wherein the lifting shuttle (13) comprises a main body (131), the main body (131) is provided with a guide rail mechanism (15), and the sheet taking mechanism is mounted on the main body (131); the film taking mechanism comprises a lifting mechanism (16) arranged on a main vehicle body (131), and the lifting mechanism (16) is provided with a film clamping mechanism (17); the guide rail mechanism (15) comprises a driving guide rail assembly arranged between the lower end of the main vehicle body (131) and the roadway (18) and a limiting guide rail assembly arranged between the upper end of the main vehicle body (131) and the three-dimensional storage shelf (11); the driving guide rail assembly comprises a plurality of lower guide rails (151) which are arranged on the roadway (18) in parallel, the lower end of the main vehicle body (131) is rotatably provided with a plurality of pulleys attached to the lower guide rails (151) through a rotating seat, and the pulleys are connected with a sliding driving motor (153) through a transmission shaft (152); the limiting guide rail assembly comprises a plurality of upper guide rails (154) which are arranged on the upper end of the three-dimensional storage shelf (11) in parallel, and a plurality of pulleys attached to the upper guide rails (154) are rotatably arranged at the upper end of the main car body (131) through a rotating seat.
5. The unmanned smart glass warehouse system of claim 4, wherein the main body (131) comprises a horizontal frame (132) and a vertical frame (133) vertically fixed on the horizontal frame (132), the vertical frame (133) extends to the upper end of the stereoscopic storage rack (11), the horizontal frame (132) and the vertical frame (133) respectively have a plurality of structural rods (134), and the width of the horizontal frame (132) and the width of the vertical frame (133) are smaller than the width of the roadway (18).
6. The unmanned intelligent glass warehouse system of claim 5, wherein the lifting mechanism (16) comprises a lifting frame body (161) arranged on the main vehicle body (131) and located on one side of the vertical vehicle frame (133), the lifting frame body (161) comprises a horizontal frame body (162) opposite to the horizontal vehicle frame (132) and a vertical frame body (163) opposite to the vertical vehicle frame (133), a placing plate (164) is fixed at the upper end of the horizontal frame body (162), rubber blocks are distributed on the placing plate (164) in a circumferential arrangement manner, chain wheels (165) are rotatably mounted at the upper end and the lower end of the vertical vehicle frame (133) through rotating seats respectively, the chain wheels (165) are in transmission connection through chains (167), one chain wheel (165) is connected with the lifting motor (166), and the lifting motor (166) is fixed with the main vehicle body (131), the chain (167) is fixedly connected with the vertical frame body (163), and a lifting guide rail (168) and a lifting slide block (169) which extend along the vertical direction and are connected in a sliding manner are arranged between the vertical frame body (163) and the vertical car frame (133).
7. The unmanned intelligent glass warehouse system of claim 6, wherein the clip mechanism (17) comprises a clip strip (171) mounted on a vertical frame (163), the clip strip (171) has a clip groove (172) extending axially, both ends of the clip groove (172) are respectively rotatably mounted with a clip belt wheel (173), the clip belt wheel (173) is in transmission connection with a clip motor (175), one of the clip belt wheels (173) is connected with the clip motor (175), the clip motor (175) is fixed with a lifting frame (161), the clip belt (174) is fixed with a clip base (176), a clip guide rail (177) and a clip slider (178) in sliding connection are respectively arranged between the clip base (176) and the upper and lower ends of the clip strip (171), the clip base (176) is fixed with a clip cylinder (179), the output end of the clamping piece cylinder (179) is fixed with a clamping plate, the two ends of the clamping plate are fixed with rubber blocks, and the glass support (12) is provided with a pulling plate for the rubber blocks on the clamping plate to be inserted.
8. The unmanned smart glass warehouse system of claim 2, wherein the stereoscopic storage rack (11) comprises a first rack (113) and a second rack (114), the glass rack (12) comprises a first glass rack (115) placed on the first rack (113) and a second glass rack (116) placed on the second rack (114); the glass shelf is characterized in that the first shelf (113) is provided with two layers and stores 5 first glass shelves (115) in each storage position, the second shelf (114) is provided with three layers and stores 6 second glass shelves (116) in each storage position, and the first shelf (113) and the second shelf (114) are equal in height.
9. The unmanned smart glass warehouse system of claim 1, wherein the WMS system (3) comprises a base module (31) and a custom module (32); the basic module (31) comprises a basic data management module (311), a device management module (312), an inventory state statistics query module (313), a device monitoring module (314), an in-out inventory management module (315) and a bar code and RFID management module (316); the customization module (32) comprises a work rule management module (321), a logistics process management module (322), a real-time monitoring module (323) and a communication interface module (324).
10. The unmanned intelligent glass warehouse system of claim 1, wherein the WCS system (5) comprises an operation log module (51), an equipment detection module (52), a job query module (53), an exception handling module (54), and a task execution module (55); the system is characterized in that a Siemens PLC is selected as a core controller by the PLC automatic control system (7), an ET200SP is selected as a slave station PLC (8) by the PLC automatic control system (7), a frequency converter is selected for the PLC automatic control system (7) to drive a conveyor, the PLC automatic control system (7) is provided with a high-precision sensor, an ID reader opposite to the glass support (12) is arranged on the PLC automatic control system (7), and a touch display screen is arranged on the PLC automatic control system (7); the RCS system (4) is connected with the PDA module (6) through a wireless local area network based on TCP/IP, and the PDA module (6) is vehicle-mounted or handheld.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210613108.2A CN115108207A (en) | 2022-05-31 | 2022-05-31 | Unmanned intelligent glass warehouse system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210613108.2A CN115108207A (en) | 2022-05-31 | 2022-05-31 | Unmanned intelligent glass warehouse system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115108207A true CN115108207A (en) | 2022-09-27 |
Family
ID=83327215
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210613108.2A Pending CN115108207A (en) | 2022-05-31 | 2022-05-31 | Unmanned intelligent glass warehouse system |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115108207A (en) |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004203529A (en) * | 2002-12-24 | 2004-07-22 | Toyota Industries Corp | Load transporting method, load transporting device, stacker crane, and automatic warehouse |
| AT503473A1 (en) * | 2006-02-16 | 2007-10-15 | Salomon Automation Gmbh | AUTOMATED SYSTEM AND METHOD FOR AUTOMATIC PICKING OR CONSOLIDATION OF ARTICLES |
| CN206767558U (en) * | 2017-06-07 | 2017-12-19 | 内蒙古科技大学 | A kind of novel cargo handling device |
| CN107512515A (en) * | 2017-09-26 | 2017-12-26 | 上海萨菲机器人系统有限公司 | Unmanned intelligent compact storage management method and warehousing system |
| CN109516050A (en) * | 2018-12-21 | 2019-03-26 | 安徽银锐智能科技股份有限公司 | A kind of original sheet glass warehousing system and its application method |
| CN209567548U (en) * | 2019-01-28 | 2019-11-01 | 贵州杰傲新材料科技有限公司 | It is a kind of for transport storage arc glass device |
| CN111591647A (en) * | 2020-04-15 | 2020-08-28 | 福耀玻璃(苏州)有限公司 | Three-dimensional warehouse for rapidly storing molds |
| CN113184426A (en) * | 2021-04-13 | 2021-07-30 | 浙江亚厦装饰股份有限公司 | Intelligent warehousing management system for assembled built-in products |
| CN113335820A (en) * | 2021-06-30 | 2021-09-03 | 广州普华灵动机器人技术有限公司 | Warehousing and ex-warehouse method for directly butting stereoscopic warehouse and AGV |
| CN113695024A (en) * | 2021-08-24 | 2021-11-26 | 中建材智能自动化研究院有限公司 | Broken recovery unit of jumbo size ultra-thin glass |
| CN114104582A (en) * | 2021-12-15 | 2022-03-01 | 天心天思(湖州)智能科技有限公司 | Dense vertical storage warehouse for stacker combined with shuttle |
-
2022
- 2022-05-31 CN CN202210613108.2A patent/CN115108207A/en active Pending
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004203529A (en) * | 2002-12-24 | 2004-07-22 | Toyota Industries Corp | Load transporting method, load transporting device, stacker crane, and automatic warehouse |
| AT503473A1 (en) * | 2006-02-16 | 2007-10-15 | Salomon Automation Gmbh | AUTOMATED SYSTEM AND METHOD FOR AUTOMATIC PICKING OR CONSOLIDATION OF ARTICLES |
| CN206767558U (en) * | 2017-06-07 | 2017-12-19 | 内蒙古科技大学 | A kind of novel cargo handling device |
| CN107512515A (en) * | 2017-09-26 | 2017-12-26 | 上海萨菲机器人系统有限公司 | Unmanned intelligent compact storage management method and warehousing system |
| CN109516050A (en) * | 2018-12-21 | 2019-03-26 | 安徽银锐智能科技股份有限公司 | A kind of original sheet glass warehousing system and its application method |
| CN209567548U (en) * | 2019-01-28 | 2019-11-01 | 贵州杰傲新材料科技有限公司 | It is a kind of for transport storage arc glass device |
| CN111591647A (en) * | 2020-04-15 | 2020-08-28 | 福耀玻璃(苏州)有限公司 | Three-dimensional warehouse for rapidly storing molds |
| CN113184426A (en) * | 2021-04-13 | 2021-07-30 | 浙江亚厦装饰股份有限公司 | Intelligent warehousing management system for assembled built-in products |
| CN113335820A (en) * | 2021-06-30 | 2021-09-03 | 广州普华灵动机器人技术有限公司 | Warehousing and ex-warehouse method for directly butting stereoscopic warehouse and AGV |
| CN113695024A (en) * | 2021-08-24 | 2021-11-26 | 中建材智能自动化研究院有限公司 | Broken recovery unit of jumbo size ultra-thin glass |
| CN114104582A (en) * | 2021-12-15 | 2022-03-01 | 天心天思(湖州)智能科技有限公司 | Dense vertical storage warehouse for stacker combined with shuttle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7419361B2 (en) | Product picking system and method | |
| CN202296138U (en) | Goods lifting device capable of lifting circularly | |
| CN109573443A (en) | A kind of storage sorting system | |
| CN110626700B (en) | Automatic three-dimensional warehouse for pipes and warehouse-in and warehouse-out method | |
| CN105438707A (en) | Method and device for automatically storing and taking goods in intensive storehouse | |
| CN110422527B (en) | Automatic stereoscopic warehouse | |
| CN113023195B (en) | Intelligent logistics storage and transportation device | |
| CN113479543B (en) | Automatic vertical plant factory that transfers in cultivation board three-dimensional space | |
| CN110092324A (en) | A kind of novel load-carrying RGV robot having the simultaneous elevating function that commutates | |
| CN110683269A (en) | Warehousing system | |
| CN104192554B (en) | Semi-automatic fixed die table PC component production system | |
| CN111422546A (en) | Full-automatic sorting method for stored goods | |
| CN102040070A (en) | Automatic storage equipment, storage system and loading and unloading control method for air container | |
| CN113120495A (en) | Cargo connection system for stereoscopic warehouse and connection carrier for same | |
| CN115892825A (en) | Intelligent steel plate storage logistics system | |
| CN209941418U (en) | Sleeper loading device | |
| CN115108207A (en) | Unmanned intelligent glass warehouse system | |
| CN210762532U (en) | Automatic change intelligent stereoscopic warehouse | |
| CN209835512U (en) | AGV lift platform that carries cargo | |
| CN110803657A (en) | Material box carrying system using lifting robot and carrying method thereof | |
| CN111517049A (en) | Transportation system and method | |
| CN208217597U (en) | Four-way walking promotes the container armful folder hoisting mechanism that warehouse trucks are carried in logistics | |
| CN115402684A (en) | Storage system | |
| CN109956247A (en) | Internet-of-Things intelligent intensive storage system based on double-track shuttle stacker | |
| CN208377611U (en) | Four-way walking promotes the container hoisting mechanism that warehouse trucks are carried in logistics |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |