CN114528362A - 高精地图轨迹采集的质控方法、装置、电子设备和介质 - Google Patents
高精地图轨迹采集的质控方法、装置、电子设备和介质 Download PDFInfo
- Publication number
- CN114528362A CN114528362A CN202210141707.9A CN202210141707A CN114528362A CN 114528362 A CN114528362 A CN 114528362A CN 202210141707 A CN202210141707 A CN 202210141707A CN 114528362 A CN114528362 A CN 114528362A
- Authority
- CN
- China
- Prior art keywords
- intersection
- track
- current
- trajectory
- point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/20—Information retrieval; Database structures therefor; File system structures therefor of structured data, e.g. relational data
- G06F16/29—Geographical information databases
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/3815—Road data
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/20—Information retrieval; Database structures therefor; File system structures therefor of structured data, e.g. relational data
- G06F16/21—Design, administration or maintenance of databases
- G06F16/215—Improving data quality; Data cleansing, e.g. de-duplication, removing invalid entries or correcting typographical errors
Landscapes
- Engineering & Computer Science (AREA)
- Databases & Information Systems (AREA)
- Theoretical Computer Science (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Data Mining & Analysis (AREA)
- General Engineering & Computer Science (AREA)
- Quality & Reliability (AREA)
- Automation & Control Theory (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
本公开提供了一种高精地图轨迹采集的质控方法、装置、电子设备和介质,涉及计算机技术领域,尤其涉及自动驾驶、高精地图、地图导航、智能交通技术领域。该方法包括:在高精地图采集的轨迹中,获取当前轨迹及所在道路上的其他轨迹;根据所述当前轨迹上的点与对应所述其他轨迹上的点之间的高程差,确定所述当前轨迹是否存在异常;若所述当前轨迹存在异常,则在所述采集的轨迹中过滤掉所述当前轨迹,停止输出所述当前轨迹至所述高精地图的生产。本公开技术方案能够快速识别出异常轨迹,降低了精度异常的风险,提高了外业数据的精度,避免将异常轨迹流入到高精地图内业生产环节,提高了高精地图的可靠性。
Description
技术领域
本公开涉及计算机技术领域,尤其涉及自动驾驶、高精地图、地图导航、智能交通技术领域,具体涉及一种高精地图轨迹采集的质控方法、装置、电子设备和介质。
背景技术
高精地图采集的外业数据包含外业轨迹信息及对应点位的图片、激光点云信息等。对于较宽的道路,外业需采集多条轨迹,使点云覆盖更完整。经过融合后的点云、图片提供给内业进行高精地图数据的生产。
目前高精地图外业轨迹的采集,完全依赖外业采集设备的精度,通过多趟采集尽可能地避免精度偏差。但是,对于如自动驾驶等精度要求较高的场景来说,多趟采集不能有效控制采集精度,在外业采集设备不稳定或发生问题时,存在精度异常的风险,进而降低了高精地图数据的可靠性。
发明内容
本公开提供了一种高精地图轨迹采集的质控方法、装置、电子设备、存储介质和计算机程序产品。
根据本公开的一方面,提供了一种高精地图轨迹采集的质控方法,包括:
在高精地图采集的轨迹中,获取当前轨迹及所在道路上的其他轨迹;
根据所述当前轨迹上的点与对应所述其他轨迹上的点之间的高程差,确定所述当前轨迹是否存在异常;
若所述当前轨迹存在异常,则在所述采集的轨迹中过滤掉所述当前轨迹,停止输出所述当前轨迹至所述高精地图的生产。
根据本公开的另一方面,提供了一种高精地图轨迹采集的质控装置,包括:
获取模块,用于在高精地图采集的轨迹中,获取当前轨迹及所在道路上的其他轨迹;
确定模块,用于根据所述当前轨迹上的点与对应所述其他轨迹上的点之间的高程差,确定所述当前轨迹是否存在异常;
控制模块,用于若所述当前轨迹存在异常,则在所述采集的轨迹中过滤掉所述当前轨迹,停止输出所述当前轨迹至所述高精地图的生产。
根据本公开的另一方面,提供了一种电子设备,包括:
至少一个处理器;以及
与所述至少一个处理器通信连接的存储器;其中,
所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本公开任一实施例中的方法。
根据本公开的另一方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行本公开任一实施例中的方法。
根据本公开的另一方面,提供了一种计算机程序产品,包括计算机程序/指令,所述计算机程序/指令被处理器执行时实现本公开任一实施例中的方法。
本公开实施例的技术方案可以对高精地图采集的轨迹基于高程差进行精度的质控,提供了有效的控制手段,能够快速识别出异常轨迹,降低了精度异常的风险,提高了外业数据的精度,避免将异常轨迹流入到高精地图内业生产环节,有效地避免了生产产能的浪费,提高了高精地图的可靠性,为自动驾驶保驾护航。
应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
附图说明
附图用于更好地理解本方案,不构成对本公开的限定。其中:
图1是根据本公开一实施例中高精地图轨迹采集的质控方法示意图;
图2a是根据本公开一实施例中高精地图轨迹采集的质控方法示意图;
图2b是根据本公开一实施例中轨迹漂移的示意图;
图3a是根据本公开一实施例中基于同向轨迹的高程差确定异常轨迹的示意图;
图3b是根据本公开一实施例中同向轨迹高程差的示意图;
图4a是根据本公开一实施例中基于对向轨迹的高程差确定异常轨迹的示意图;
图4b是根据本公开一实施例中对向轨迹高程差的示意图;
图5a是根据本公开一实施例中基于平面距离确定异常轨迹的示意图;
图5b是根据本公开一实施例中轨迹交叉的示意图;
图6是根据本公开一实施例中单条轨迹高程差的示意图;
图7是根据本公开一实施例中高精地图轨迹采集的质控装置框图;
图8是用来实现本公开实施例的高精地图轨迹采集的质控方法的电子设备的框图。
具体实施方式
以下结合附图对本公开的示范性实施例做出说明,其中包括本公开实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本公开的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
本公开实施例的技术方案应用于自动驾驶、高精地图、地图导航、智能交通等技术领域,尤其应用于高精地图采集的外业数据的质控场景,介于外业采集和内业生产之间的环节,对外业采集到的多条轨迹基于高程差进行精度质控。该技术方案可以应用于高精地图采集轨迹的质控设备,采集的轨迹可以显示在质控设备的界面上,对识别出的异常轨迹也可以标识在界面上,包括静态或动态显示方式等,便于质控人员查看和监控。整个质控过程为自动实现,能够快速识别出异常轨迹,降低精度异常的风险。另外,对质控的结果还可以采用人工质控的方式再次识别,从而进一步提高外业数据的精度。经过质控后的轨迹再输出至内业生产环节,能够避免异常轨迹流入到高精地图的内业生产环节,从而有效地避免了生产产能的浪费,提高了高精地图的可靠性,为自动驾驶保驾护航。
本公开实施例中,高精地图的外业采集时,采集设备能够自动获取并记录轨迹沿行驶方向的位置信息,包括x、y、z值。在质控过程中使用的二维地图可以是标准的二维路网(也可以称为底图),基于高程和平面距离两个维度在采集轨迹范围内匹配二维路网,从而识别出异常轨迹,保证高程或平面精度不满足质量要求的轨迹不会流入高精地图的生产环节,避免了外业数据不合格导致的高精地图产品数据的质量异常。
本公开实施例中涉及的高程差是指两点在Z向上的距离,可以使用两点Z坐标值之差的绝对值来计算,即ΔH=|Z1-Z2|;或者也可以使用公式 来计算,具体不限定;其中,Z1和Z2分别为两点的Z坐标值,ΔH为这两点的高程差。
来计算,具体不限定;其中,Z1和Z2分别为两点的Z坐标值,ΔH为这两点的高程差。
本公开实施例中,两点的平面距离是指忽略Z向即高度上的距离后,视为一个平面内两点之间的距离。但实际场景中两点在Z向上是有可能坐标不同的,即位于不同高度的平面上。该平面距离可以采用如下公式来计算: 其中,X1和Y1为一点的X坐标值和Y坐标值,X2和Y2为另一点的X坐标值和Y坐标值,ΔL为这两点的平面距离,下文不再赘述。
其中,X1和Y1为一点的X坐标值和Y坐标值,X2和Y2为另一点的X坐标值和Y坐标值,ΔL为这两点的平面距离,下文不再赘述。
图1为本公开一实施例中高精地图轨迹采集的质控方法示意图。如图1所示,该方法包括:
S101:在高精地图采集的轨迹中,获取当前轨迹及所在道路上的其他轨迹;
S102:根据当前轨迹上的点与对应其他轨迹上的点之间的高程差,确定当前轨迹是否存在异常;
S103:若当前轨迹存在异常,则在采集的轨迹中过滤掉当前轨迹,停止输出当前轨迹至高精地图的生产。
在一种实施方式中,S102可以包括:
在其他轨迹为多条轨迹的情况下,在道路对应的二维地图上定位参考线,确定参考线与当前轨迹及多条轨迹的交点;
根据得到的各交点之间的高程差与预设的第一阈值,确定当前轨迹是否存在异常。
这种基于当前轨迹和多条其他轨迹的高程差来确定异常轨迹的方式,计算方便,容易实现,通过比对阈值即可确定出当前轨迹是否存在异常,为高精地图采集的轨迹提供了有效的质控手段。
在一种实施方式中,根据得到的各交点之间的高程差与预设的第一阈值,确定当前轨迹是否存在异常,包括:
若多条轨迹为与当前轨迹同向的两条轨迹,且当前轨迹与参考线的交点为第一交点,两条轨迹与参考线的交点为第二交点和第三交点,则计算第一交点、第二交点和第三交点中任意两点的高程差;
若第一交点与第二交点的高程差以及第一交点与第三交点的高程差均超过预设的第一阈值,且第二交点与第三交点的高程差不超过第一阈值,则确定当前轨迹存在异常。
上述检测当前轨迹是否异常的方式,借助同向采集的两条轨迹,基于高程差能够有效识别出异常的当前轨迹,这种情况表明当前轨迹与同向的其他轨迹高程差明显过大,在同一道路的场景下属于异常轨迹,进而过滤掉该异常轨迹,停止输出该异常轨迹至高精地图的生产,降低了精度异常的风险,提高了外业数据的精度和高精地图的可靠性。
在一种实施方式中,根据得到的各交点之间的高程差与预设的第一阈值,确定当前轨迹是否存在异常,包括:
若多条轨迹为与当前轨迹对向的两条轨迹,且当前轨迹与参考线的交点为第四交点,两条轨迹与参考线的交点为第五交点和第六交点,则计算第四交点与第五交点的高程差以及第四交点与第六交点的高程差;
若第四交点与第五交点的高程差或第四交点与第六交点的高程差超过预设的第一阈值,则确定当前轨迹存在异常。
上述检测当前轨迹是否异常的方式,借助对向采集的两条轨迹,基于高程差能够有效识别出异常的当前轨迹,这种情况表明当前轨迹与对向的其他轨迹高程差明显过大,在同一道路的场景下属于异常轨迹,进而过滤掉该异常轨迹,停止输出该异常轨迹至高精地图的生产,降低了精度异常的风险,提高了外业数据的精度和高精地图的可靠性。
在一种实施方式中,上述方法还可以包括:
在当前轨迹上定位参考点,以参考点为圆心及指定长度为半径得到圆形区域;
在道路对应的二维地图上确定道路的中心线;
若中心线与圆形区域无交集,则确定当前轨迹存在漂移的异常。
上述检测当前轨迹是否异常的方式,基于当前轨迹和道路中心线进行判断,能够有效识别出产生漂移的当前轨迹,这种轨迹明显处于道路范围之外,属于异常轨迹,停止输出这种类型的异常轨迹至高精地图的生产,降低了精度异常的风险,提高了外业数据的精度和高精地图的可靠性。
在一种实施方式中,上述方法还可以包括:
在其他轨迹为对向轨迹的情况下,根据当前轨迹上的点与对应对向轨迹上的点之间的平面距离,确定当前轨迹是否存在与对向轨迹交叉的异常。
上述方式基于当前轨迹和对向轨迹对应点的平面距离,能够有效识别出与对向轨迹交叉的当前轨迹,在同一道路的场景下相向行驶的轨迹不可能出现交叉的情况,因此,与对向轨迹产生交叉的当前轨迹明显属于异常轨迹,停止输出这类异常轨迹至高精地图的生产,降低了精度异常的风险,提高了外业数据的精度和高精地图的可靠性。
在一种实施方式中,根据当前轨迹上的点与对应对向轨迹上的点之间的平面距离,确定当前轨迹是否存在与对向轨迹交叉的异常,包括:
在道路对应的二维地图上定位参考线,得到参考线与当前轨迹的第七交点以及参考线与对向轨迹的第八交点;
计算第七交点与第八交点之间的平面距离;
若平面距离小于预设的第二阈值,则确定当前轨迹存在与对向轨迹交叉的异常。
上述方式基于当前轨迹和对向轨迹对应点的平面距离,能够有效识别出与对向轨迹交叉的当前轨迹,这种轨迹明显属于异常轨迹,停止输出这类异常轨迹至高精地图的生产,降低了精度异常的风险,提高了外业数据的精度以及高精地图的可靠性。
在一种实施方式中,上述方法还可以包括:
在当前轨迹上按指定时长或指定长度确定两点,计算两点的高程差,若两点的高程差超过预设的第三阈值,则确定当前轨迹存在高程异常。
上述方式适用于单条轨迹的识别场景,无需借助其他轨迹,基于当前轨迹上两点的高程差可以确定出当前轨迹是否存在高程异常,进而降低了精度异常的风险,提高了外业数据的精度以及高精地图的可靠性。
本公开实施例提供的上述方法,可以对高精地图采集的轨迹基于高程差进行精度的质控,提供了有效的控制手段,能够快速识别出异常轨迹,降低了精度异常的风险,提高了外业数据的精度,避免将异常轨迹流入到高精地图内业生产环节,有效地避免了生产产能的浪费,提高了高精地图的可靠性,为自动驾驶保驾护航。
图2a为本公开一实施例中高精地图轨迹采集的质控方法示意图。如图2a所示,该方法包括:
S201:在高精地图采集的轨迹中,获取当前轨迹及所在道路上的其他轨迹;
其中,高精地图采集的轨迹通常为多条,可以是一次采集得到的多条轨迹,也可以是多次采集得到的多条轨迹,具体不限定。上述当前轨迹与其他轨迹位于同一道路中,其他轨迹可以是与当前轨迹同向的轨迹,或者也可以是与当前轨迹对向的轨迹。
S202:在其他轨迹为多条轨迹的情况下,在上述道路对应的二维地图上定位参考线,确定参考线与当前轨迹及多条轨迹的交点;
其中,二维地图是指通过平面内横纵坐标反映道路信息的地图。在高精地图采集到当前轨迹后,可以在二维地图中找到当前轨迹所在的道路。上述参考线可以为与当前道路垂直的水平线等等。
S203:根据得到的各交点之间的高程差与预设的第一阈值,确定当前轨迹是否存在异常;
其中,得到的各交点包括参考线与当前轨迹的交点,以及参考线与每一条其他轨迹的交点。第一阈值的大小可以根据需要设置,如2米或2.5米等等,具体数值不限定。
S204:在当前轨迹上定位参考点,以该参考点为圆心及指定长度为半径得到圆形区域,在上述道路对应的二维地图上确定该道路的中心线,根据中心线和圆形区域确定当前轨迹是否存在漂移的异常;
示例性地,上述参考点可以按照指定时长或指定长度在当前轨迹上确定,如每隔1s或2s定位一个参考点,或者每隔100米或200米定位一个参考点等等。上述半径的大小也可以根据需要设置,可以参考上述道路的路宽来设置,如设置为路宽的一半,本公开对此不做具体限定。另外,上述中心线也可以根据路宽来设置,如设置为路宽的一半且允许一定的误差范围等等,本公开对此不做具体限定。
在一种实施方式中,上述S204中的根据中心线和圆形区域确定当前轨迹是否存在漂移的异常,可以具体包括:
判断中心线与圆形区域是否有交集,如果无交集,则确定当前轨迹存在漂移的异常,如果有交集,则确定当前轨迹正常。
进一步地,上述S204还可以由以下步骤替换:
在当前轨迹上定位多个参考点,以每个参考点为圆心及指定长度为半径得到对应的圆形区域,在上述道路对应的二维地图上确定该道路的中心线,依次匹配中心线与每个圆形区域是否有交集,若无交集的匹配结果个数达到指定个数,则确定当前轨迹存在漂移的异常。
示例性地,上述中心线与圆形区域有交集包括中心线上至少有一个点落入圆形区域内,包括落在圆形区域的边界线上。
图2b为本公开一实施例中轨迹漂移的示意图。参见图2b,二维地图的当前道路中,黑实线为中心线,一般为路宽的一半,也可以根据实际情况在允许的误差范围内微调。带箭头的虚线为高精地图采集到的当前轨迹,A点为每隔1s或每隔20米在当前轨迹上定位得到的参考点中的一个,以A为圆心路宽的一半为半径得到图中的圆形区域。图中明显看出,中心线距离圆形区域较远,二者无交集,因此,可以确定当前轨迹发生漂移,已偏移到路面范围之外,属于异常轨迹。或者,也可以连续10s或连续200米内均不存在有交集的圆形区域,即连续10次当前轨迹与二维地图均不匹配,则确定当前轨迹漂移,平面精度异常。
S205:在其他轨迹为对向轨迹的情况下,根据当前轨迹上的点与对应对向轨迹上的点之间的平面距离,确定当前轨迹是否存在与对向轨迹交叉的异常;
S206:在确定当前轨迹存在异常的情况下,在采集的轨迹中过滤掉当前轨迹,停止输出当前轨迹至高精地图的生产。
图3a为本公开一实施例中基于同向轨迹的高程差确定异常轨迹的示意图。如图3a所示,在一种实施方式中,上述步骤S203可以具体包括:
S301:若多条轨迹为与当前轨迹同向的两条轨迹,且当前轨迹与参考线的交点为第一交点,两条轨迹与参考线的交点为第二交点和第三交点,则计算第一交点、第二交点和第三交点中任意两点的高程差;
S302:若第一交点与第二交点的高程差以及第一交点与第三交点的高程差均超过预设的第一阈值,且第二交点与第三交点的高程差不超过第一阈值,则确定当前轨迹存在异常。
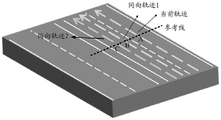
图3b为本公开一实施例中同向轨迹高程差的示意图。如图3b所示,在高精地图采集的轨迹中获取当前轨迹和同一道路上同向的两条轨迹,即图中的同向轨迹1和同向轨迹2。在上述道路对应的二维地图上定位参考线,即与当前道路垂直的直线。该参考线与当前轨迹的交点为A,与同向轨迹1的交点为B,与同向轨迹2的交点为C。分别计算A、B和C点中任意两点的高程差,如果A、B两点高程差超过指定阈值2米,且A、C两点的高程差也超过2米,但B与C的高程差不超过2米,则可以确定A点所在的当前轨迹高程异常,属于异常轨迹(即该轨迹为少数),而B、C两点所在轨迹均正常(即这两条轨迹属于多数)。也就是说,采集的多数轨迹是正常轨迹,只有少数轨迹是异常轨迹,即高程明显与其他大多数轨迹不一致的轨迹才会被确定为异常轨迹,符合少数服从多数的原则。
图4a为本公开一实施例中基于对向轨迹的高程差确定异常轨迹的示意图。如图4a所示,在一种实施方式中,上述步骤S203可以具体包括:
S401:若多条轨迹为与当前轨迹对向的两条轨迹,且当前轨迹与参考线的交点为第四交点,两条轨迹与参考线的交点为第五交点和第六交点,则计算第四交点与第五交点的高程差以及第四交点与第六交点的高程差;
S402:若第四交点与第五交点的高程差或第四交点与第六交点的高程差超过预设的第一阈值,则确定当前轨迹存在异常。
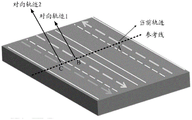
图4b为本公开一实施例中对向轨迹高程差的示意图。参见图4b,在高精地图采集的轨迹中获取当前轨迹和同一道路上对向的两条轨迹,即图中的对向轨迹1和对向轨迹2。在上述道路对应的二维地图上定位参考线,即与当前道路垂直的直线。该参考线与当前轨迹的交点为A,与对向轨迹1的交点为B,与对向轨迹2的交点为C。分别计算A、B两点以及A、C两点的高程差,如果A、B两点高程差未超过指定阈值2米,且A、C两点的高程差也未超过2米,则可以确定A点所在的当前轨迹高程无异常。如果A、B两点高程差超过2米或A、C两点的高程差超过2米,则可以确定A点所在的当前轨迹高程异常。
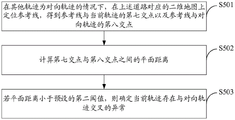
图5a为本公开一实施例中基于平面距离确定异常轨迹的示意图。如图5a所示,在一种实施方式中,上述步骤S205可以具体包括:
S501:在其他轨迹为对向轨迹的情况下,在上述道路对应的二维地图上定位参考线,得到参考线与当前轨迹的第七交点以及参考线与对向轨迹的第八交点;
S502:计算第七交点与第八交点之间的平面距离;
S503:若平面距离小于预设的第二阈值,则确定当前轨迹存在与对向轨迹交叉的异常。
其中,第二阈值可以根据需要设置大小,具体数值不限定。
图5b为本公开一实施例中轨迹交叉的示意图。参见图5b,高精地图采集了当前道路上的当前轨迹和对向轨迹,在该道路对应的二维地图上每隔2s或200米定位参考线,其中一次定位得到参考线与当前轨迹的交点M以及参考线与对向轨迹的交点N。计算M和N的平面距离,如果该平面距离小于指定阈值1米,则可以确定当前轨迹存在与对向轨迹交叉的情况,精度异常。图中的A点示意为两条轨迹出现交叉位置处的交点。
本公开提供的上述任一实施例中,还可以包括以下步骤:
在当前轨迹上按指定时长或指定长度确定出两点,计算该两点的高程差,若该两点的高程差超过预设的第三阈值,则确定当前轨迹存在高程异常。
图6为本公开一实施例中单条轨迹高程差的示意图。参见图6,高精地图采集的当前轨迹如图中虚线所示。每隔1s或100米在当前轨迹上确定对应的点,其中得到两点A和B。计算A、B两点的高程差,若该高程差值超过指定阈值20米,则可以确定当前轨迹存在高程异常。
本公开实施例提供的上述方法,可以对高精地图采集的轨迹基于高程差进行精度的质控,提供了有效的控制手段,能够快速识别出异常轨迹,降低了精度异常的风险,提高了外业数据的精度,避免将异常轨迹流入到高精地图内业生产环节,有效地避免了生产产能的浪费,提高了高精地图的可靠性,为自动驾驶保驾护航。
图7为本公开一实施例中高精地图轨迹采集的质控装置框图。如图7所示,该装置包括:
获取模块701,用于在高精地图采集的轨迹中,获取当前轨迹及所在道路上的其他轨迹;
确定模块702,用于根据当前轨迹上的点与对应其他轨迹上的点之间的高程差,确定当前轨迹是否存在异常;
控制模块703,用于若当前轨迹存在异常,则在采集的轨迹中过滤掉当前轨迹,停止输出当前轨迹至高精地图的生产。
在一种实施方式中,确定模块702可以包括:
交点确定单元,用于在其他轨迹为多条轨迹的情况下,在道路对应的二维地图上定位参考线,确定参考线与当前轨迹及多条轨迹的交点;
异常确定单元,用于根据得到的各交点之间的高程差与预设的第一阈值,确定当前轨迹是否存在异常。
在一种实施方式中,异常确定单元可以用于:
若多条轨迹为与当前轨迹同向的两条轨迹,且当前轨迹与参考线的交点为第一交点,两条轨迹与参考线的交点为第二交点和第三交点,则计算第一交点、第二交点和第三交点中任意两点的高程差;
若第一交点与第二交点的高程差以及第一交点与第三交点的高程差均超过预设的第一阈值,且第二交点与第三交点的高程差不超过第一阈值,则确定当前轨迹存在异常。
在另一种实施方式中,异常确定单元可以用于:
若多条轨迹为与当前轨迹对向的两条轨迹,且当前轨迹与参考线的交点为第四交点,两条轨迹与参考线的交点为第五交点和第六交点,则计算第四交点与第五交点的高程差以及第四交点与第六交点的高程差;
若第四交点与第五交点的高程差或第四交点与第六交点的高程差超过预设的第一阈值,则确定当前轨迹存在异常。
在一种实施方式中,上述装置还可以包括:
漂移模块,用于在当前轨迹上定位参考点,以参考点为圆心及指定长度为半径得到圆形区域;在道路对应的二维地图上确定道路的中心线;若中心线与圆形区域无交集,则确定当前轨迹存在漂移的异常。
在一种实施方式中,上述装置还可以包括:
交叉模块,用于在其他轨迹为对向轨迹的情况下,根据当前轨迹上的点与对应对向轨迹上的点之间的平面距离,确定当前轨迹是否存在与对向轨迹交叉的异常。
在一种实施方式中,交叉模块可以用于:
在其他轨迹为对向轨迹的情况下,在道路对应的二维地图上定位参考线,得到参考线与当前轨迹的第七交点以及参考线与对向轨迹的第八交点;
计算第七交点与第八交点之间的平面距离;
若平面距离小于预设的第二阈值,则确定当前轨迹存在与对向轨迹交叉的异常。
在一种实施方式中,确定模块702还可以用于:
在当前轨迹上按指定时长或指定长度确定两点,计算两点的高程差,若两点的高程差超过预设的第三阈值,则确定当前轨迹存在高程异常。
本公开实施例提供的上述装置,可以对高精地图采集的轨迹基于高程差进行精度的质控,提供了有效的控制手段,能够快速识别出异常轨迹,降低了精度异常的风险,提高了外业数据的精度,避免将异常轨迹流入到高精地图内业生产环节,有效地避免了生产产能的浪费,提高了高精地图的可靠性,为自动驾驶保驾护航。
本公开的技术方案中,所涉及的用户个人信息的获取,存储和应用等,均符合相关法律法规的规定,且不违背公序良俗。
根据本公开的实施例,本公开还提供了一种电子设备、一种可读存储介质和一种计算机程序产品。
图8示出了可以用来实施本公开的实施例的示例电子设备800的示意性框图。电子设备旨在表示各种形式的数字计算机,诸如,膝上型计算机、台式计算机、工作台、个人数字助理、服务器、刀片式服务器、大型计算机、和其它适合的计算机。电子设备还可以表示各种形式的移动装置,诸如,个人数字处理、蜂窝电话、智能电话、可穿戴设备和其它类似的计算装置。本文所示的部件、它们的连接和关系、以及它们的功能仅仅作为示例,并且不意在限制本文中描述的和/或者要求的本公开的实现。
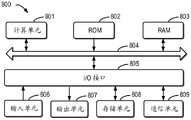
如图8所示,设备800包括计算单元801,其可以根据存储在只读存储器(ROM)802中的计算机程序或者从存储单元808加载到随机访问存储器(RAM)803中的计算机程序,来执行各种适当的动作和处理。在RAM 803中,还可存储设备800操作所需的各种程序和数据。计算单元801、ROM 802以及RAM 803通过总线804彼此相连。输入/输出(I/O)接口805也连接至总线804。
设备800中的多个部件连接至I/O接口805,包括:输入单元806,例如键盘、鼠标等;输出单元807,例如各种类型的显示器、扬声器等;存储单元808,例如磁盘、光盘等;以及通信单元809,例如网卡、调制解调器、无线通信收发机等。通信单元809允许设备800通过诸如因特网的计算机网络和/或各种电信网络与其他设备交换信息/数据。
计算单元801可以是各种具有处理和计算能力的通用和/或专用处理组件。计算单元801的一些示例包括但不限于中央处理单元(CPU)、图形处理单元(GPU)、各种专用的人工智能(AI)计算芯片、各种运行机器学习模型算法的计算单元、数字信号处理器(DSP)、以及任何适当的处理器、控制器、微控制器等。计算单元801执行上文所描述的各个方法和处理,例如高精地图轨迹采集的质控方法。例如,在一些实施例中,高精地图轨迹采集的质控方法可被实现为计算机软件程序,其被有形地包含于机器可读介质,例如存储单元808。在一些实施例中,计算机程序的部分或者全部可以经由ROM 802和/或通信单元809而被载入和/或安装到设备800上。当计算机程序加载到RAM 803并由计算单元801执行时,可以执行上文描述的高精地图轨迹采集的质控方法的一个或多个步骤。备选地,在其他实施例中,计算单元801可以通过其他任何适当的方式(例如,借助于固件)而被配置为执行高精地图轨迹采集的质控方法。
本文中以上描述的系统和技术的各种实施方式可以在数字电子电路系统、集成电路系统、场可编程门阵列(FPGA)、专用集成电路(ASIC)、专用标准产品(ASSP)、芯片上系统的系统(SOC)、复杂可编程逻辑设备(CPLD)、计算机硬件、固件、软件、和/或它们的组合中实现。这些各种实施方式可以包括:实施在一个或者多个计算机程序中,该一个或者多个计算机程序可在包括至少一个可编程处理器的可编程系统上执行和/或解释,该可编程处理器可以是专用或者通用可编程处理器,可以从存储系统、至少一个输入装置、和至少一个输出装置接收数据和指令,并且将数据和指令传输至该存储系统、该至少一个输入装置、和该至少一个输出装置。
用于实施本公开的方法的程序代码可以采用一个或多个编程语言的任何组合来编写。这些程序代码可以提供给通用计算机、专用计算机或其他可编程数据处理装置的处理器或控制器,使得程序代码当由处理器或控制器执行时使流程图和/或框图中所规定的功能/操作被实施。程序代码可以完全在机器上执行、部分地在机器上执行,作为独立软件包部分地在机器上执行且部分地在远程机器上执行或完全在远程机器或服务器上执行。
在本公开的上下文中,机器可读介质可以是有形的介质,其可以包含或存储以供指令执行系统、装置或设备使用或与指令执行系统、装置或设备结合地使用的程序。机器可读介质可以是机器可读信号介质或机器可读储存介质。机器可读介质可以包括但不限于电子的、磁性的、光学的、电磁的、红外的、或半导体系统、装置或设备,或者上述内容的任何合适组合。机器可读存储介质的更具体示例会包括基于一个或多个线的电气连接、便携式计算机盘、硬盘、随机存取存储器(RAM)、只读存储器(ROM)、可擦除可编程只读存储器(EPROM或快闪存储器)、光纤、便捷式紧凑盘只读存储器(CD-ROM)、光学储存设备、磁储存设备、或上述内容的任何合适组合。
为了提供与用户的交互,可以在计算机上实施此处描述的系统和技术,该计算机具有:用于向用户显示信息的显示装置(例如,CRT(阴极射线管)或者LCD(液晶显示器)监视器);以及键盘和指向装置(例如,鼠标或者轨迹球),用户可以通过该键盘和该指向装置来将输入提供给计算机。其它种类的装置还可以用于提供与用户的交互;例如,提供给用户的反馈可以是任何形式的传感反馈(例如,视觉反馈、听觉反馈、或者触觉反馈);并且可以用任何形式(包括声输入、语音输入或者、触觉输入)来接收来自用户的输入。
可以将此处描述的系统和技术实施在包括后台部件的计算系统(例如,作为数据服务器)、或者包括中间件部件的计算系统(例如,应用服务器)、或者包括前端部件的计算系统(例如,具有图形用户界面或者网络浏览器的用户计算机,用户可以通过该图形用户界面或者该网络浏览器来与此处描述的系统和技术的实施方式交互)、或者包括这种后台部件、中间件部件、或者前端部件的任何组合的计算系统中。可以通过任何形式或者介质的数字数据通信(例如,通信网络)来将系统的部件相互连接。通信网络的示例包括:局域网(LAN)、广域网(WAN)和互联网。
计算机系统可以包括客户端和服务器。客户端和服务器一般远离彼此并且通常通过通信网络进行交互。通过在相应的计算机上运行并且彼此具有客户端-服务器关系的计算机程序来产生客户端和服务器的关系。服务器可以是云服务器,也可以为分布式系统的服务器,或者是结合了区块链的服务器。
应该理解,可以使用上面所示的各种形式的流程,重新排序、增加或删除步骤。例如,本发公开中记载的各步骤可以并行地执行也可以顺序地执行也可以不同的次序执行,只要能够实现本公开公开的技术方案所期望的结果,本文在此不进行限制。
上述具体实施方式,并不构成对本公开保护范围的限制。本领域技术人员应该明白的是,根据设计要求和其他因素,可以进行各种修改、组合、子组合和替代。任何在本公开的精神和原则之内所作的修改、等同替换和改进等,均应包含在本公开保护范围之内。
Claims (19)
1.一种高精地图轨迹采集的质控方法,包括:
在高精地图采集的轨迹中,获取当前轨迹及所在道路上的其他轨迹;
根据所述当前轨迹上的点与对应所述其他轨迹上的点之间的高程差,确定所述当前轨迹是否存在异常;
若所述当前轨迹存在异常,则在所述采集的轨迹中过滤掉所述当前轨迹,停止输出所述当前轨迹至所述高精地图的生产。
2.根据权利要求1所述的方法,其中,所述根据所述当前轨迹上的点与对应所述其他轨迹上的点之间的高程差,确定所述当前轨迹是否存在异常,包括:
在所述其他轨迹为多条轨迹的情况下,在所述道路对应的二维地图上定位参考线,确定所述参考线与所述当前轨迹及所述多条轨迹的交点;
根据得到的各交点之间的高程差与预设的第一阈值,确定所述当前轨迹是否存在异常。
3.根据权利要求2所述的方法,其中,所述根据得到的各交点之间的高程差与预设的第一阈值,确定所述当前轨迹是否存在异常,包括:
若所述多条轨迹为与所述当前轨迹同向的两条轨迹,且所述当前轨迹与所述参考线的交点为第一交点,所述两条轨迹与所述参考线的交点为第二交点和第三交点,则计算所述第一交点、第二交点和第三交点中任意两点的高程差;
若所述第一交点与第二交点的高程差以及所述第一交点与第三交点的高程差均超过预设的第一阈值,且所述第二交点与第三交点的高程差不超过所述第一阈值,则确定所述当前轨迹存在异常。
4.根据权利要求2所述的方法,其中,所述根据得到的各交点之间的高程差与预设的第一阈值,确定所述当前轨迹是否存在异常,包括:
若所述多条轨迹为与所述当前轨迹对向的两条轨迹,且所述当前轨迹与所述参考线的交点为第四交点,所述两条轨迹与所述参考线的交点为第五交点和第六交点,则计算所述第四交点与第五交点的高程差以及所述第四交点与第六交点的高程差;
若所述第四交点与第五交点的高程差或所述第四交点与第六交点的高程差超过预设的第一阈值,则确定所述当前轨迹存在异常。
5.根据权利要求1所述的方法,还包括:
在所述当前轨迹上定位参考点,以所述参考点为圆心及指定长度为半径得到圆形区域;
在所述道路对应的二维地图上确定所述道路的中心线;
若所述中心线与所述圆形区域无交集,则确定所述当前轨迹存在漂移的异常。
6.根据权利要求1所述的方法,还包括:
在所述其他轨迹为对向轨迹的情况下,根据所述当前轨迹上的点与对应对向轨迹上的点之间的平面距离,确定所述当前轨迹是否存在与对向轨迹交叉的异常。
7.根据权利要求6所述的方法,其中,所述根据所述当前轨迹上的点与对应对向轨迹上的点之间的平面距离,确定所述当前轨迹是否存在与对向轨迹交叉的异常,包括:
在所述道路对应的二维地图上定位参考线,得到所述参考线与所述当前轨迹的第七交点以及所述参考线与所述对向轨迹的第八交点;
计算所述第七交点与第八交点之间的平面距离;
若所述平面距离小于预设的第二阈值,则确定所述当前轨迹存在与对向轨迹交叉的异常。
8.根据权利要求1-7中任一项所述的方法,还包括:
在所述当前轨迹上按指定时长或指定长度确定两点,计算所述两点的高程差,若所述两点的高程差超过预设的第三阈值,则确定所述当前轨迹存在高程异常。
9.一种高精地图轨迹采集的质控装置,包括:
获取模块,用于在高精地图采集的轨迹中,获取当前轨迹及所在道路上的其他轨迹;
确定模块,用于根据所述当前轨迹上的点与对应所述其他轨迹上的点之间的高程差,确定所述当前轨迹是否存在异常;
控制模块,用于若所述当前轨迹存在异常,则在所述采集的轨迹中过滤掉所述当前轨迹,停止输出所述当前轨迹至所述高精地图的生产。
10.根据权利要求9所述的装置,其中,所述确定模块包括:
交点确定单元,用于在所述其他轨迹为多条轨迹的情况下,在所述道路对应的二维地图上定位参考线,确定所述参考线与所述当前轨迹及所述多条轨迹的交点;
异常确定单元,用于根据得到的各交点之间的高程差与预设的第一阈值,确定所述当前轨迹是否存在异常。
11.根据权利要求10所述的装置,其中,所述异常确定单元用于:
若所述多条轨迹为与所述当前轨迹同向的两条轨迹,且所述当前轨迹与所述参考线的交点为第一交点,所述两条轨迹与所述参考线的交点为第二交点和第三交点,则计算所述第一交点、第二交点和第三交点中任意两点的高程差;
若所述第一交点与第二交点的高程差以及所述第一交点与第三交点的高程差均超过预设的第一阈值,且所述第二交点与第三交点的高程差不超过所述第一阈值,则确定所述当前轨迹存在异常。
12.根据权利要求10所述的装置,其中,所述异常确定单元用于:
若所述多条轨迹为与所述当前轨迹对向的两条轨迹,且所述当前轨迹与所述参考线的交点为第四交点,所述两条轨迹与所述参考线的交点为第五交点和第六交点,则计算所述第四交点与第五交点的高程差以及所述第四交点与第六交点的高程差;
若所述第四交点与第五交点的高程差或所述第四交点与第六交点的高程差超过预设的第一阈值,则确定所述当前轨迹存在异常。
13.根据权利要求9所述的装置,还包括:
漂移模块,用于在所述当前轨迹上定位参考点,以所述参考点为圆心及指定长度为半径得到圆形区域;在所述道路对应的二维地图上确定所述道路的中心线;若所述中心线与所述圆形区域无交集,则确定所述当前轨迹存在漂移的异常。
14.根据权利要求9所述的装置,还包括:
交叉模块,用于在所述其他轨迹为对向轨迹的情况下,根据所述当前轨迹上的点与对应对向轨迹上的点之间的平面距离,确定所述当前轨迹是否存在与对向轨迹交叉的异常。
15.根据权利要求14所述的装置,其中,所述交叉模块用于:
在所述其他轨迹为对向轨迹的情况下,在所述道路对应的二维地图上定位参考线,得到所述参考线与所述当前轨迹的第七交点以及所述参考线与所述对向轨迹的第八交点;
计算所述第七交点与第八交点之间的平面距离;
若所述平面距离小于预设的第二阈值,则确定所述当前轨迹存在与对向轨迹交叉的异常。
16.根据权利要求9-15中任一项所述的装置,所述确定模块还用于:
在所述当前轨迹上按指定时长或指定长度确定两点,计算所述两点的高程差,若所述两点的高程差超过预设的第三阈值,则确定所述当前轨迹存在高程异常。
17.一种电子设备,包括:
至少一个处理器;以及
与所述至少一个处理器通信连接的存储器;其中,
所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-8中任一项所述的方法。
18.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行根据权利要求1-8中任一项所述的方法。
19.一种计算机程序产品,包括计算机程序/指令,所述计算机程序/指令被处理器执行时实现权利要求1-8中任一项所述的方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210141707.9A CN114528362A (zh) | 2022-02-16 | 2022-02-16 | 高精地图轨迹采集的质控方法、装置、电子设备和介质 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210141707.9A CN114528362A (zh) | 2022-02-16 | 2022-02-16 | 高精地图轨迹采集的质控方法、装置、电子设备和介质 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114528362A true CN114528362A (zh) | 2022-05-24 |
Family
ID=81623790
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210141707.9A Pending CN114528362A (zh) | 2022-02-16 | 2022-02-16 | 高精地图轨迹采集的质控方法、装置、电子设备和介质 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114528362A (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115727871A (zh) * | 2022-09-30 | 2023-03-03 | 北京百度网讯科技有限公司 | 一种轨迹质量检测方法、装置、电子设备和存储介质 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20200125102A1 (en) * | 2018-10-17 | 2020-04-23 | Baidu Usa Llc | Autonomous driving using a standard navigation map and lane configuration determined based on prior trajectories of vehicles |
| CN111475590A (zh) * | 2019-01-23 | 2020-07-31 | 阿里巴巴集团控股有限公司 | 道路数据审核方法、系统、终端设备及存储介质 |
| CN113091708A (zh) * | 2021-04-06 | 2021-07-09 | 中山大学 | 基于多样本gps质控数据的道路分段坡度估计方法及系统 |
| CN113252062A (zh) * | 2021-06-01 | 2021-08-13 | 智道网联科技(北京)有限公司 | 生成实时地图的方法、装置及电子设备、存储介质 |
| CN114048598A (zh) * | 2021-11-04 | 2022-02-15 | 中国地质大学(武汉) | 基于高程变化点检测的立体交叉口识别方法及装置 |
-
2022
- 2022-02-16 CN CN202210141707.9A patent/CN114528362A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20200125102A1 (en) * | 2018-10-17 | 2020-04-23 | Baidu Usa Llc | Autonomous driving using a standard navigation map and lane configuration determined based on prior trajectories of vehicles |
| CN111475590A (zh) * | 2019-01-23 | 2020-07-31 | 阿里巴巴集团控股有限公司 | 道路数据审核方法、系统、终端设备及存储介质 |
| CN113091708A (zh) * | 2021-04-06 | 2021-07-09 | 中山大学 | 基于多样本gps质控数据的道路分段坡度估计方法及系统 |
| CN113252062A (zh) * | 2021-06-01 | 2021-08-13 | 智道网联科技(北京)有限公司 | 生成实时地图的方法、装置及电子设备、存储介质 |
| CN114048598A (zh) * | 2021-11-04 | 2022-02-15 | 中国地质大学(武汉) | 基于高程变化点检测的立体交叉口识别方法及装置 |
Non-Patent Citations (2)
| Title |
|---|
| 刘良旭;乔少杰;刘宾;乐嘉锦;唐常杰;: "基于R-Tree的高效异常轨迹检测算法", 软件学报, vol. 20, no. 09, 15 September 2009 (2009-09-15), pages 2426 - 2435 * |
| 李翔;华一新;张宏;张江水;: "粗精匹配结合的矢量道路辅助惯性导航算法", 测绘学报, no. 08, 15 August 2017 (2017-08-15) * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115727871A (zh) * | 2022-09-30 | 2023-03-03 | 北京百度网讯科技有限公司 | 一种轨迹质量检测方法、装置、电子设备和存储介质 |
| CN115727871B (zh) * | 2022-09-30 | 2025-12-16 | 北京百度网讯科技有限公司 | 一种轨迹质量检测方法、装置、电子设备和存储介质 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN114003613A (zh) | 高精地图车道线更新方法、装置、电子设备以及存储介质 | |
| JP7356528B2 (ja) | 地図データ処理方法及び装置 | |
| CN111753765A (zh) | 感知设备的检测方法、装置、设备及存储介质 | |
| CN113029136B (zh) | 定位信息处理的方法、设备、存储介质及程序产品 | |
| CN113762272A (zh) | 道路信息的确定方法、装置和电子设备 | |
| CN112558072B (zh) | 车辆定位方法、装置、系统、电子设备及存储介质 | |
| CN115127565A (zh) | 高精地图数据生成方法、装置、电子设备及存储介质 | |
| CN113987098B (zh) | 高精地图道路边界更新方法、装置、电子设备以及存储介质 | |
| CN113743344A (zh) | 道路信息的确定方法、装置和电子设备 | |
| CN114647637A (zh) | 车道中心线精度的确定方法、装置、设备以及存储介质 | |
| CN114528362A (zh) | 高精地图轨迹采集的质控方法、装置、电子设备和介质 | |
| CN117629182A (zh) | 一种定位方法、装置、设备及存储介质 | |
| CN113963039B (zh) | 路口匹配的方法、装置、电子设备及存储介质 | |
| CN113219505B (zh) | 用于车路协同隧道场景的采集gps坐标的方法、装置和设备 | |
| CN110705545A (zh) | 障碍物识别方法、装置、存储介质及巡检机器人 | |
| CN114373051B (zh) | 地图更新方法、装置、电子设备及存储介质 | |
| CN116881583B (zh) | 一种物联网感知数据与空间模型匹配度计算方法及装置 | |
| CN116773148B (zh) | 一种基于视觉的激光投影系统精度验证方法 | |
| CN119418326A (zh) | 边坡监测的方法及装置、电子设备和存储介质 | |
| CN114299192B (zh) | 定位建图的方法、装置、设备和介质 | |
| CN115937494B (zh) | 全景图中的位置标注方法、装置、电子设备和存储介质 | |
| CN114543824B (zh) | 确定车辆行驶线路的方法、装置、设备、介质及产品 | |
| CN117647782A (zh) | 基于轨迹的传感器参数标定方法、设备及自动驾驶车辆 | |
| CN115510923A (zh) | 信号灯自动关联道路的方法、装置、电子设备及介质 | |
| CN114312786A (zh) | 导航的方法、装置、电子设备和存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |