CN114474437A - 单晶硅上料自适应夹持转运装置及方法 - Google Patents
单晶硅上料自适应夹持转运装置及方法 Download PDFInfo
- Publication number
- CN114474437A CN114474437A CN202210104356.4A CN202210104356A CN114474437A CN 114474437 A CN114474437 A CN 114474437A CN 202210104356 A CN202210104356 A CN 202210104356A CN 114474437 A CN114474437 A CN 114474437A
- Authority
- CN
- China
- Prior art keywords
- clamping
- monocrystalline silicon
- feeding
- cover body
- transferring
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 229910021421 monocrystalline silicon Inorganic materials 0.000 title claims abstract description 104
- 238000000034 method Methods 0.000 title claims abstract description 17
- 239000002210 silicon-based material Substances 0.000 title claims description 10
- 230000007246 mechanism Effects 0.000 claims abstract description 63
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 claims abstract description 19
- 229910052710 silicon Inorganic materials 0.000 claims abstract description 19
- 239000010703 silicon Substances 0.000 claims abstract description 19
- 239000013078 crystal Substances 0.000 claims abstract description 18
- 230000005484 gravity Effects 0.000 claims abstract description 12
- 238000012546 transfer Methods 0.000 claims description 16
- 239000000463 material Substances 0.000 claims description 9
- 230000009471 action Effects 0.000 claims description 8
- 230000003068 static effect Effects 0.000 claims description 5
- 230000000670 limiting effect Effects 0.000 claims description 4
- 239000003302 ferromagnetic material Substances 0.000 claims 1
- 230000008569 process Effects 0.000 description 7
- 230000000694 effects Effects 0.000 description 4
- 230000007723 transport mechanism Effects 0.000 description 4
- 238000013461 design Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000032258 transport Effects 0.000 description 3
- 238000009434 installation Methods 0.000 description 2
- 239000010985 leather Substances 0.000 description 2
- 230000036961 partial effect Effects 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 229910021419 crystalline silicon Inorganic materials 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000002829 reductive effect Effects 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B28—WORKING CEMENT, CLAY, OR STONE
- B28D—WORKING STONE OR STONE-LIKE MATERIALS
- B28D5/00—Fine working of gems, jewels, crystals, e.g. of semiconductor material; apparatus or devices therefor
- B28D5/0058—Accessories specially adapted for use with machines for fine working of gems, jewels, crystals, e.g. of semiconductor material
- B28D5/0082—Accessories specially adapted for use with machines for fine working of gems, jewels, crystals, e.g. of semiconductor material for supporting, holding, feeding, conveying or discharging work
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P70/00—Climate change mitigation technologies in the production process for final industrial or consumer products
- Y02P70/50—Manufacturing or production processes characterised by the final manufactured product
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Crystals, And After-Treatments Of Crystals (AREA)
Abstract
本发明涉及单晶硅上料自适应夹持转运装置及方法,包括上料机构及位于上料机构旁侧用于承接单晶硅的转运机构,上料机构包括送料机架及铰接于送料机架上由送料驱动机构驱动转动的上料架,转运机构包括滑台及用于夹持单晶硅的转运夹爪,转运机构旁侧具有单晶硅棒夹持机构,单晶硅棒夹持机构包括用于承托单晶硅棒的回转下夹持件及位于回转下夹持件上方由夹持驱动装置驱动下压单晶硅棒的上夹持件,本发明提供了单晶硅上料自适应夹持转运装置,能够通过放置架与夹爪组配合实现对单晶硅棒的上料与转运,减少上料时间提高棒料输送效率并利用自适应夹持夹持结构,可以找到硅晶棒实际轴向重心,依靠锁紧装置,实现硅晶棒稳定竖立。
Description
技术领域
本发明涉及晶硅加工设备技术领域,尤其指单晶硅上料自适应夹持转运装置及方法。
背景技术
现有开方机一般为卧式结构,首先将待切割棒料通过水平输送履带机构输送至指定位置,再由上料机构夹持,由于设有中部设有旋转机构,因此可以将待切割棒料竖直或者水平的输送至切割夹持机构的可夹持位置。由于立式开方机具有切割冷却效果好,设备外形尺寸小等优势,因此立式切割机得到快速发展,在上料工步中,需要对棒料进行翻转传送并转运至切割台进行操作,为此有必要设置一种能够与水平输送机构相对接的,能够对棒料进行翻转转运的装置,现有的设备结构布局不合理,过程中造成棒料磨损磕碰。
发明内容
为了解决上述技术问题,本发明提供一种能够适用于立式开方机的棒料转运机构。可以找到硅晶棒实际轴向重心,调整位置依靠锁紧装置调整位置,实现硅晶棒稳定竖立。
本发明的技术方案如下:一种单晶硅上料自适应夹持转运装置,包括上料机构及位于上料机构旁侧用于承接单晶硅的转运机构,所述上料机构包括送料机架及铰接于送料机架上由送料驱动机构驱动转动的上料架,所述转运机构包括滑台及用于夹持单晶硅棒的转运夹爪,转运机构旁侧具有单晶硅棒夹持机构,所述单晶硅棒夹持机构包括用于承托单晶硅棒的回转下夹持件及位于回转下夹持件上方由夹持驱动装置驱动下压单晶硅棒的上夹持件。
优选的,回转下夹持件包括回转底座及位于回转底座上方固定连接的球头,所述球头顶部具有扣于球头外部用于承载单晶硅棒的外罩体,所述球头与外罩体内腔之间具有摆动间隙,外罩体内部铰接有能吸附球头与外罩体实现外罩体定位的电磁铁,所述外罩体和球头材料为铁磁体。
优选的,电磁铁顶部具有球状凸起,所述球状凸起嵌于外罩体内实现电磁铁与外罩体的铰接链接,所述球头顶部及电磁铁底部为相互配合的平面,所述电磁铁底部与球头顶部贴合。
优选的,所述球状凸起顶部嵌入外罩体内,所述外罩体内腔还固定有安装板,所述安装板具有供球状凸起穿过的开孔。
优选的,所述上料架包括放置架,所述放置架朝向转运机构一侧设置有载物台,所述放置架朝向转运机构的一侧铰接于送料机架上,所述放置架表面具有导轮,所述送料驱动机构为铰接于送料机架上的气缸、电缸或液压缸,所述送料驱动机构下部铰接连接于送料机架,送料驱动机构的伸缩端与放置架铰接连接。
优选的,所述转运机构的滑台移动端固定有由电机驱动转动的转运基座,所述转运基座上固定有横向导轨,横向导轨上滑动配合有夹爪组,所述夹爪组包括一对夹爪,一对夹爪由夹爪驱动装置驱动沿横向导轨相向或背向运动。
优选的,所述回转底座设置于一底板上,所述底板上固定有驱动回转底座转动的底座驱动电机,所述上夹持件设置于一安装座上,所述安装座与底座之间还设置有用于夹持单晶硅边皮的边皮上夹件及边皮下夹件,各个边皮上夹件及边皮下夹件由边皮夹持驱动装置驱动使对应的边皮上夹件与边皮下夹件相向夹紧单晶硅棒待切割边皮区域。
优选的,所述安装座与上夹持件通过轴承连接,上夹持件的下端面具有经弹簧连接的顶销,安装座与夹持驱动装置的伸缩端固定连接,所述夹持驱动装置为气缸、电缸或液压缸。
优选的,所述放置架与载物台滑动配合,所述放置架上固定有沿棒料移动方向布设的导杆,所述载物台套于导杆上,导杆的两端固定有防止载物台脱出的限位板,所述置物架沿棒料长度方向布设有多个槽状支架,所述导轮成对布设于槽状支架的顶部,所述载物台底部设置有滑轮,所述送料机架上固定有能抵靠滑轮的导向支板,所述导向支板的内侧为弧面,所述送料机架上部固定有能辅助支撑置物架的定位托盘。
本发明还包括一种单晶硅上料自适应夹持转运方法,利用如上所述的一种单晶硅上料自适应夹持转运装置,包括以下步骤:
(1)将上料机构的放置架初始状态下横置,待切割的单晶硅棒沿水平方向输入后进入载物台,并由送料驱动机构驱动使放置架转变为竖直状态;
(2)利用转运基座上的夹爪组一对夹爪张开,在滑台的控制下移动至载物台旁侧,通过夹爪夹持载物台上的单晶硅棒;
(3)放置架复位,滑台与转运基座电机配合带动夹持单晶硅棒移动至下夹持件旁侧并将转动至回转下夹持件的外罩体上表面,放松夹爪;
(4)电磁铁与球头处于未锁紧状态,由于重力的作用,球头的上部外沿与外罩体相接触,球头下部与外罩体下部的接触面为间隙所配合,回转下夹持件的外罩体上表面在单晶硅棒重心作用下作自适应偏转,实现单晶硅棒位置的自适应调整;
(5)单晶硅棒静止后,电磁铁作用,对外罩体及球头吸附实现锁紧,保证自适应调整后外罩体的位置不动,上夹持件在驱动装置的驱动下下行与回转下夹持件夹持单晶硅棒。
本发明还包括一种单晶硅上料自适应夹持转运方法,利用如上所述的一种单晶硅上料自适应夹持转运装置,包括以下步骤:
(1)将上料机构的放置架初始状态下横置,待切割的单晶硅棒沿水平方向输入后进入载物台,并由送料驱动机构驱动使放置架转变为竖直状态;
(2)利用转运基座上的夹爪组一对夹爪张开,在滑台的控制下移动至载物台旁侧,通过夹爪夹持载物台上的单晶硅棒;
(3)放置架复位,滑台与转运基座电机配合带动夹持单晶硅棒移动至下夹持件旁侧并将转动至回转下夹持件的外罩体上表面,放松夹爪;
(4)电磁铁与球头处于未锁紧状态,由于重力的作用,球头的上部外沿与外罩体相接触,球头下部与外罩体下部的接触面为间隙所配合,回转下夹持件的外罩体上表面在单晶硅棒重心作用下作自适应偏转,实现单晶硅棒位置的自适应调整;
(5)单晶硅棒静止后,电磁铁作用,对外罩体及球头吸附实现锁紧,保证自适应调整后外罩体的位置不动,上夹持件在驱动装置的驱动下下行与回转下夹持件夹持单晶硅棒。
与现有技术相比,本发明具有如下有益效果:
(1)本发明提供了单晶硅棒上料自适应夹持转运装置,能够通过放置架与夹爪组配合实现对单晶硅棒的上料与转运,从而能够实现实现置物架上的棒料翻转与运输,减少上料时间提高棒料输送效率。
(2)该装置可以找到硅晶棒实际轴向重心,通过球头与外罩体之间的摆动间隙实现对外罩体位置的调整,依靠电磁铁吸附球头与外罩体实现锁紧,实现硅晶棒稳定竖立,结构简单损耗小,寿命高。
(3)本发明置物架上设计有导轮与辅助导板,能够通过导轮满足棒料输送过程中的稳定,减小移动过程中对棒料表面的影响。
附图说明
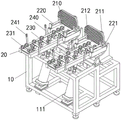
图1为本发明实施例一整体结构示意图;
图2为本发明转运机构局部结构示意图;
图3为本发明上料机构局部结构示意图;
图4为本发明上料机构侧视结构示意图一(单晶硅棒水平状态);
图5为本发明上料机构侧视结构示意图二(单晶硅棒竖直状态);
图6为本发明单晶硅夹持机构结构示意图;
图7为本发明单晶硅回转下夹持件机构结构示意图;
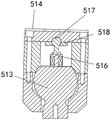
图8为本发明球头与外罩体剖面结构示意图(电磁铁未工作状态);
图9为本发明球头与外罩体剖面结构示意图(电磁铁未工作状态);
图10为本发明球头与外罩体剖面结构示意图(电磁铁工作状态);
图11为本发明上夹持件剖面结构示意图。
图中:100-单晶硅棒,10-送料机架,110-转轴,111-送料气缸,120-导向支板,20-放置架,210-载物台,211-滑轮,212-凹槽,220-导杆,221-限位板,230-槽状支架,231-导轮,240-侧向辅助导板,241-柔性垫,30-滑台,310-基柱,311-横向导轨;
40-夹爪组,410-夹爪,411-垫块;
510-回转下夹持件,511-回转底座,512-底板,513-球头,514-外罩体,515-摆动间隙,516-电磁铁,517-球状凸起,518-安装板,520-上夹持件,521-安装座,522-顶销,530-边皮上夹件,540-边皮下夹件。
具体实施方式
下面结合附图和具体实施例来对本发明进行详细的说明。
参见图1-10,一种单晶硅上料自适应夹持转运装置,包括上料机构及位于上料机构旁侧用于承接单晶硅棒100的转运机构,以及用于夹持单晶硅棒方便后续进行切割的单晶硅棒夹持机构。
本实施例中,所述上料机构包括一由送料驱动装置驱动翻转的上料架,所述上料架包括放置架20,所述放置架朝向转运机构一侧设置有载物台210,所述转运机构包括滑台30及滑台移动端固定的转运基座,转运基座朝向放置架一侧设置有横向导轨311,横向导轨上滑动配合有夹爪组40,夹爪组包括一对夹爪410,一对夹爪由夹爪驱动装置驱动沿横向导轨相向或背向运动。
本实施例中,所述的夹爪驱动装置为电缸、气缸或液压缸,所述夹爪组中其中一个夹爪410固定于横向导轨311,另一个夹爪由电缸、气缸或液压缸驱动横向移动。
放置架铰接于一送料机架10上,所述送料机架10上经轴承铰接连接有转轴110,所述转轴110与放置架固定连接,从而实现放置架20与送料机架的铰接连接,所述送料机架上设置有驱动放置架绕其与送料机架铰接处转动的送料驱动机构。
本实施例中,所述送料驱动机构为送料气缸111,所述送料气缸111下部铰接连接于送料机架,送料气缸111的伸缩端与放置架铰接连接,工作时,当单晶硅棒料接触载物台210后,通过送料气缸111伸缩杆的伸长可以推动放置架20由水平向竖直方向转变,从而将单晶硅棒由水平方向向竖直方向转变,当单晶硅棒位于竖直状态时由载物台210进行支撑。
本实施例图示中,所述的滑台为二轴滑台,滑台移动端的移动方向为朝向或远离放置架方向移动以及横向移动从而对应多个工位的夹持机构和上料机构,所述转运基座包括固定于滑台上的回转电机及固定于回转电机输出端的基柱310,所述夹爪驱动装置及夹爪组等构件设置在基柱310上。
当单晶硅棒由放置架的水平向竖直方向转变后,夹爪组的一对夹爪410张开,之后滑台靠近单晶硅棒100,将单晶硅棒100置入一对夹爪410内,夹爪410在夹爪驱动装置驱动下夹持单晶硅棒100,并通过转运基座结合滑台转送至下一工位,到达下一工位后夹爪组的两个夹爪松开即可实现单晶硅棒的下料。
本实施例中,所述夹爪组具有两组,分布在单晶硅棒的上部及下部,实际设计中可以根据单晶硅棒长度的不同进行增减。
本实施例中,单晶硅棒夹持机构,所述单晶硅棒夹持机构包括用于承托单晶硅棒的回转下夹持件510及位于回转下夹持件上方由夹持驱动装置驱动下压单晶硅棒的上夹持件520。
回转下夹持件包括回转底座511及位于回转底座上方固定连接的球头513,所述球头顶部具有扣于球头外部用于承载单晶硅棒的外罩体514,所述球头与外罩体内腔之间具有摆动间隙515,外罩体内部铰接有能吸附球头与外罩体实现外罩体定位的电磁铁516,所述外罩体和球头材料为铁磁体。
电磁铁顶部具有球状凸起517,所述球状凸起嵌于外罩体内实现电磁铁与外罩体的铰接链接,所述球头顶部及电磁铁底部为相互配合的平面,所述电磁铁底部与球头顶部贴合。
所述球状凸起顶部嵌入外罩体内,所述外罩体内腔还固定有安装板518,所述安装板具有供球状凸起穿过的开孔。
工作时,将单晶硅棒放置在外罩体的上端面上,电磁铁与球头处于未锁紧状态,由于重力的作用,球头的上部外沿与外罩体相接触,球头下部与外罩体下部的接触面为间隙所配合,单晶硅棒在重心位置的作用下能实现单晶硅棒位置的自适应调整,单晶硅棒静止后,电磁铁516作用,对外罩体及球头吸附实现锁紧,保证自适应调整后外罩体的位置不动,从而使单晶硅棒在转运过程中更为平稳,该自适应锁紧结构对球头磨损小寿命长。
所述回转底座设置于一底板512上,所述底板上固定有驱动回转底座转动的底座驱动电机,所述上夹持件520设置于一安装座521上并由安装座上的夹持驱动装置驱动上下移动。
所述安装座与上夹持件通过轴承连接,上夹持件与安装座通过轴承连接的下端面具有经弹簧连接的顶销522,安装座与夹持驱动装置的伸缩端固定连接,所述夹持驱动装置为气缸、电缸或液压缸。
利用顶销522作用于单晶硅棒能够借助弹簧提供更强的压力,也能够适应单晶硅棒顶面可能存在的斜度。
利用所述的一种单晶硅上料自适应夹持转运装置能够实现以下单晶硅夹持方法,包括以下步骤:
(1)将上料机构的放置架初始状态下横置,待切割的单晶硅棒沿水平方向输入后进入载物台,并由送料驱动机构驱动使放置架转变为竖直状态;
(2)利用转运基座上的夹爪组一对夹爪张开,在滑台的控制下移动至载物台旁侧,通过夹爪夹持载物台上的单晶硅棒;
(3)放置架复位,滑台与转运基座电机配合带动夹持单晶硅棒移动至下夹持件旁侧并将转动至回转下夹持件的外罩体上表面,放松夹爪;
(4)电磁铁与球头处于未锁紧状态,由于重力的作用,球头的上部外沿与外罩体相接触,球头下部与外罩体下部的接触面为间隙所配合,回转下夹持件的外罩体上表面在单晶硅棒重心作用下作自适应偏转,实现单晶硅棒位置的自适应调整;
(5)单晶硅棒静止后,电磁铁作用,对外罩体及球头吸附实现锁紧,保证自适应调整后外罩体的位置不动,上夹持件在驱动装置的驱动下下行与回转下夹持件夹持单晶硅棒。
在本发明的一个实施例中,所述安装座与底座之间还设置有用于夹持单晶硅边皮的边皮上夹件530及边皮下夹件540,所述边皮上夹件及边皮下夹件由驱动装置驱动夹紧单晶硅棒待切割边皮区域。边皮上夹件及边皮下夹件可以由气动或液压形式驱动实现对单晶硅棒外周部的夹持。
在本发明的一个实施例中,所述放置架20与载物台滑动配合,所述放置架20上固定有沿棒料移动方向布设的导杆220,所述载物台210套于导杆220上,导杆的两端固定有防止载物台脱出的限位板221,本实施例中所述的限位板221与放置架20固定连接,通过限位板221的限位从而控制载物台在竖直和水平状态转化过程中行程的限制。
本实施例中,所述载物台底部设置有滑轮211,所述送料机架上具有能抵靠滑轮的导向支板120,所述导向支板的内侧为弧面。
工作时,当单晶硅棒接触到载物台210后推动载物台210在导杆上移动至接近转运机构一侧的限位板221,当放置架20由水平向竖直方向转变时,滑轮211与导向支板120弧面保持接触同时将从而实现载物台沿导杆220抬升至导杆的高位,该结构能够实现对置物架翻转过程的稳定。
实际设计中,所述的滑台可以是单一方向的也可以根据需要设计为二轴滑台(十字滑台)或三轴滑台,驱动方式可以采用还可以采用丝杆或皮带方式。
实际设计中,送料气缸111能够替换为电缸或液压缸,其工作原理与气缸410形式相同。
在上述任一实施例中,为了能够更方便棒料的滑移,所述置物架沿棒料长度方向布设有多个槽状支架230,所述放置架表面具有导轮231,所述导轮成对布设于槽状支架的顶部。
单晶硅棒100在移动过程中持续的与导轮231接触,从而方便棒料的移动。
在上述任一实施例中,为了能够更方便将棒料在放置架横置状态下表面移动过程中位置的对中导向以及对棒料侧部的限位,置物架20的侧部固定有侧向辅助导板240,所述侧向辅助导板上固定有能与棒料侧部接触的柔性垫241,柔性垫241能够辅助支撑棒料避免对棒料表面产生损伤。
在上述任一实施例中,为了保证置物架在横置状态下棒料运输的稳定以及置物架20位置的定位,所述送料机架上部固定有能辅助支撑置物架20的定位托盘130,本实施例中,所述定位托盘130成对对称位于置物架20下方两侧,同时保证上下料时载物台210位置的正确。
在上述任一实施例中,各个夹爪组的一对夹爪410相向面具有内凹的夹持面,所述夹持面内侧固定有垫块411,所述垫块具有多个,且相邻垫块之间留有间隙,多个垫块设计能够使夹爪适应待切割前的单晶硅棒的弧形表面或切割后单晶硅棒的平面。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
Claims (10)
1.一种单晶硅上料自适应夹持转运装置,其特征在于,包括上料机构及位于上料机构旁侧用于承接单晶硅的转运机构,所述上料机构包括送料机架及铰接于送料机架上由送料驱动机构驱动转动的上料架,所述转运机构包括滑台及用于夹持单晶硅棒的转运夹爪,转运机构旁侧具有单晶硅棒夹持机构,所述单晶硅棒夹持机构包括用于承托单晶硅棒的回转下夹持件及位于回转下夹持件上方由夹持驱动装置驱动下压单晶硅棒的上夹持件。
2.根据权利要求1所述的单晶硅上料自适应夹持转运装置,其特征在于,回转下夹持件包括回转底座及位于回转底座上方固定连接的球头,所述球头顶部具有扣于球头外部用于承载单晶硅棒的外罩体,所述球头与外罩体内腔之间具有摆动间隙,外罩体内部铰接有能吸附球头与外罩体实现外罩体定位的电磁铁,所述外罩体和球头材料为铁磁体。
3.根据权利要求2所述的一种单晶硅上料自适应夹持转运装置,其特征在于,电磁铁顶部具有球状凸起,所述球状凸起嵌于外罩体内实现电磁铁与外罩体的铰接链接,所述球头顶部及电磁铁底部为相互配合的平面,所述电磁铁底部与球头顶部贴合。
4.根据权利要求2所述的一种单晶硅上料自适应夹持转运装置,其特征在于,所述球状凸起顶部嵌入外罩体内,所述外罩体内腔还固定有安装板,所述安装板具有供球状凸起穿过的开孔。
5.根据权利要求2所述的一种单晶硅上料自适应夹持转运装置,其特征在于,所述上料架包括放置架,所述放置架朝向转运机构一侧设置有载物台,所述放置架朝向转运机构的一侧铰接于送料机架上,所述放置架表面具有导轮,所述送料驱动机构为铰接于送料机架上的气缸、电缸或液压缸,所述送料驱动机构下部铰接连接于送料机架,送料驱动机构的伸缩端与放置架铰接连接。
6.根据权利要求5所述的一种单晶硅上料自适应夹持转运装置,其特征在于,所述转运机构的滑台移动端固定有由电机驱动转动的转运基座,所述转运基座上固定有横向导轨,横向导轨上滑动配合有夹爪组,所述夹爪组包括一对夹爪,一对夹爪由夹爪驱动装置驱动沿横向导轨相向或背向运动。
7.根据权利要求1所述的一种单晶硅上料自适应夹持转运装置,其特征在于,所述回转底座设置于一底板上,所述底板上固定有驱动回转底座转动的底座驱动电机,所述上夹持件设置于一安装座上,所述安装座与底座之间还设置有用于夹持单晶硅边皮的边皮上夹件及边皮下夹件,各个边皮上夹件及边皮下夹件由边皮夹持驱动装置驱动使对应的边皮上夹件与边皮下夹件相向夹紧单晶硅待切割边皮区域。
8.根据权利要求7所述的一种单晶硅上料自适应夹持转运装置,其特征在于,所述安装座与上夹持件通过轴承连接,上夹持件的下端面具有经弹簧连接的顶销,安装座与夹持驱动装置的伸缩端固定连接,所述夹持驱动装置为气缸、电缸或液压缸。
9.根据权利要求5所述的一种单晶硅上料自适应夹持转运装置,其特征在于,所述放置架与载物台滑动配合,所述放置架上固定有沿棒料移动方向布设的导杆,所述载物台套于导杆上,导杆的两端固定有防止载物台脱出的限位板,所述置物架沿棒料长度方向布设有多个槽状支架,所述导轮成对布设于槽状支架的顶部,所述载物台底部设置有滑轮,所述送料机架上固定有能抵靠滑轮的导向支板,所述导向支板的内侧为弧面,所述送料机架上部固定有能辅助支撑置物架的定位托盘。
10.一种单晶硅上料自适应夹持转运方法,其特征在于,利用如权利要求6所述的一种单晶硅上料自适应夹持转运装置,包括以下步骤:
(1)将上料机构的放置架初始状态下横置,待切割的单晶硅棒沿水平方向输入后进入载物台,并由送料驱动机构驱动使放置架转变为竖直状态;
(2)利用转运基座上的夹爪组一对夹爪张开,在滑台的控制下移动至载物台旁侧,通过夹爪夹持载物台上的单晶硅棒;
(3)放置架复位,滑台与转运基座电机配合带动夹持单晶硅棒移动至下夹持件旁侧并将转动至回转下夹持件的外罩体上表面,放松夹爪;
(4)电磁铁与球头处于未锁紧状态,由于重力的作用,球头的上部外沿与外罩体相接触,球头下部与外罩体下部的接触面为间隙所配合,回转下夹持件的外罩体上表面在单晶硅棒重心作用下作自适应偏转,实现单晶硅棒位置的自适应调整;
(5)单晶硅静止后,电磁铁作用,对外罩体及球头吸附实现锁紧,保证自适应调整后外罩体的位置不动,上夹持件在驱动装置的驱动下下行与回转下夹持件夹持单晶硅。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210104356.4A CN114474437B (zh) | 2022-01-28 | 2022-01-28 | 单晶硅上料自适应夹持转运装置及方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210104356.4A CN114474437B (zh) | 2022-01-28 | 2022-01-28 | 单晶硅上料自适应夹持转运装置及方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN114474437A true CN114474437A (zh) | 2022-05-13 |
| CN114474437B CN114474437B (zh) | 2023-11-28 |
Family
ID=81476381
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210104356.4A Active CN114474437B (zh) | 2022-01-28 | 2022-01-28 | 单晶硅上料自适应夹持转运装置及方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114474437B (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115284086A (zh) * | 2022-10-08 | 2022-11-04 | 扬州大伟光电科技有限公司 | 数控磨面倒角滚圆一体机用上料工装 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB8500068D0 (en) * | 1985-01-03 | 1985-02-13 | Yang T H | Clamping device |
| CN105835246A (zh) * | 2016-05-14 | 2016-08-10 | 洛阳金诺机械工程有限公司 | 一种晶体硅棒的切割装置及其切割方法 |
| CN109830759A (zh) * | 2019-01-21 | 2019-05-31 | 陆阳清 | 一种软包新能源圆柱锂电池双向校直组件及方法 |
| CN215360000U (zh) * | 2021-03-30 | 2021-12-31 | 领胜城科技(江苏)有限公司 | 一种3c片状产品的自动上料压贴成型装置 |
| CN113954256A (zh) * | 2021-11-01 | 2022-01-21 | 青岛高测科技股份有限公司 | 硅棒切割系统的上下料装置及硅棒切割系统 |
-
2022
- 2022-01-28 CN CN202210104356.4A patent/CN114474437B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB8500068D0 (en) * | 1985-01-03 | 1985-02-13 | Yang T H | Clamping device |
| CN105835246A (zh) * | 2016-05-14 | 2016-08-10 | 洛阳金诺机械工程有限公司 | 一种晶体硅棒的切割装置及其切割方法 |
| CN109830759A (zh) * | 2019-01-21 | 2019-05-31 | 陆阳清 | 一种软包新能源圆柱锂电池双向校直组件及方法 |
| CN215360000U (zh) * | 2021-03-30 | 2021-12-31 | 领胜城科技(江苏)有限公司 | 一种3c片状产品的自动上料压贴成型装置 |
| CN113954256A (zh) * | 2021-11-01 | 2022-01-21 | 青岛高测科技股份有限公司 | 硅棒切割系统的上下料装置及硅棒切割系统 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115284086A (zh) * | 2022-10-08 | 2022-11-04 | 扬州大伟光电科技有限公司 | 数控磨面倒角滚圆一体机用上料工装 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114474437B (zh) | 2023-11-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN207548753U (zh) | 机械手上下料装置 | |
| CN216996634U (zh) | 单晶硅上料转运装置 | |
| JPH06503272A (ja) | 第1の機械から第2の機械に加工物を運ぶための装置 | |
| CN107755494A (zh) | 一种电芯极耳折弯机构 | |
| CN111769064B (zh) | 上下料装置 | |
| CN114474437A (zh) | 单晶硅上料自适应夹持转运装置及方法 | |
| KR101182378B1 (ko) | 반송 로봇 | |
| CN108907981B (zh) | 一种凸轮轴磨床上下料装置 | |
| CN108000278A (zh) | 一种油泵转子去毛刺装置 | |
| CN210064434U (zh) | 一种电芯翻转上料装置及应用其的设备 | |
| CN108327436A (zh) | 雕刻机中的全自动翻板装置 | |
| JPH0890110A (ja) | 板材自動加工装置 | |
| CN207696549U (zh) | 上下料机械手臂 | |
| CN111668146B (zh) | 一种水平式硅片石英舟装卸片自动化工作线 | |
| CN112736021B (zh) | 一种超薄硅片的夹持装置 | |
| CN214454892U (zh) | 一种c型弹簧定型机 | |
| CN212161776U (zh) | 一种水平式硅片石英舟装卸片自动化工作线 | |
| CN114536573B (zh) | 一种单晶硅开方方法 | |
| CN213562588U (zh) | 片舟转运机械手 | |
| CN114643526A (zh) | 一种矩形金属壳体抛光装置及其抛光方法 | |
| CN208699937U (zh) | 一种下料翻转单元 | |
| CN113305735A (zh) | 一种用于磨削设备的上料装置及磨削设备 | |
| CN108621306B (zh) | 瓶件削口设备及瓶件削口流水线 | |
| CN117465941B (zh) | 一种酒瓶上料输送线及上料方法 | |
| CN219362374U (zh) | 一种翻转搬运机构 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20240711 Address after: No. 1588 Lingmei South Street, Hushi Town, Xiuyu District, Putian City, Fujian Province, 351146 Patentee after: Fujian Tianshiyuan Intelligent Equipment Co.,Ltd. Country or region after: China Address before: No.6 Nanxing Road, sugarcane street, Minhou County, Fuzhou City, Fujian Province, 350100 Patentee before: FUZHOU TIANRUI SCROLL SAW TECHNOLOGY Co.,Ltd. Country or region before: China |