CN113697119A - 一种输电线无人机巡检设备 - Google Patents
一种输电线无人机巡检设备 Download PDFInfo
- Publication number
- CN113697119A CN113697119A CN202111160308.9A CN202111160308A CN113697119A CN 113697119 A CN113697119 A CN 113697119A CN 202111160308 A CN202111160308 A CN 202111160308A CN 113697119 A CN113697119 A CN 113697119A
- Authority
- CN
- China
- Prior art keywords
- mounting
- motor
- unmanned aerial
- aerial vehicle
- transmission line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000005540 biological transmission Effects 0.000 title claims abstract description 43
- 238000007689 inspection Methods 0.000 title claims abstract description 29
- 239000000725 suspension Substances 0.000 claims abstract description 10
- 230000005611 electricity Effects 0.000 claims description 12
- 239000011810 insulating material Substances 0.000 claims description 5
- 239000007788 liquid Substances 0.000 abstract description 4
- 238000010276 construction Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 238000011161 development Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 238000010009 beating Methods 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 239000010445 mica Substances 0.000 description 2
- 229910052618 mica group Inorganic materials 0.000 description 2
- 230000002035 prolonged effect Effects 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENTS OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D47/00—Equipment not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/04—Helicopters
- B64C27/08—Helicopters with two or more rotors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENTS OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D47/00—Equipment not otherwise provided for
- B64D47/08—Arrangements of cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02G—INSTALLATION OF ELECTRIC CABLES OR LINES, OR OF COMBINED OPTICAL AND ELECTRIC CABLES OR LINES
- H02G1/00—Methods or apparatus specially adapted for installing, maintaining, repairing or dismantling electric cables or lines
- H02G1/02—Methods or apparatus specially adapted for installing, maintaining, repairing or dismantling electric cables or lines for overhead lines or cables
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
Abstract
本发明公开了一种输电线无人机巡检设备,包括机体和悬挂单元;机体外表面设置有安装环,所述安装环上设置有放置槽,所述机体上设置有录像单元和飞行单元,机体内设置有PLC控制器;悬挂单元包含有连接板、安装螺栓、安装架、电机安装板、电机、转轴、滑轮、电液推杆一、放置架和辅助轮,所述安装架设置在机体的上表面,安装架的两侧底端分别设置有连接板,所述连接板的上表面设置有安装螺栓,所述安装架上设置有电机安装板,所述电机安装板的上表面设置有电机,所述电机的输出轴连接有转轴,该无人机巡检设备能够对设备进行折叠放置,减少对设备的损伤,且能够长时间工作,提高巡检的效率,具有实用性。
Description
技术领域
本发明涉及无人机技术领域,具体为一种输电线无人机巡检设备。
背景技术
随着经济和科学技术的不断发展,各种电力设备也得到了完善,近年来,无人机在电力设备当中的应用范围越来越广泛,无人机的有效应用促进了电力行业的可持续发展,电力设备的应用范围比较广泛,因此传统意义上的电力管理体系渐渐无法满足当前电力行业的发展需求,而无人机的应用则解决了相关问题,降低了电力建设难度,解决了区域巡检问题;
现在技术中申请号202110108249.4提出了一种输电线无人机巡检设备,包括:机体;安装座,四个所述安装座每两个为一组分别固定安装在所述机体的外侧四角处;安装机构,所述安装机构设置在所述安装座的内腔中;插杆,所述插杆可拆卸的插接在所述安装座的内侧;敲打机构,所述敲打机构固定安装在所述机体的底端;云台,所述云台固定安装在所述敲打机构的底端后侧中部位置;摄像机,所述摄像机安装在所述云台的底端内侧;
其在使用时,需要对无人机巡检设备来回拆卸,对无人机巡检设备会造成一定的损伤,且在巡检时无法长时间工作,不利于实际应用。
发明内容
本发明要解决的技术问题是克服现有的缺陷,提供一种输电线无人机巡检设备,能够对设备进行折叠放置,减少对设备的损伤,且能够长时间工作,提高巡检的效率,具有实用性,可以有效解决背景技术中的问题。
为实现上述目的,本发明提供如下技术方案:一种输电线无人机巡检设备,包括机体和悬挂单元;
机体:外表面设置有安装环,所述安装环上设置有放置槽,所述机体上设置有录像单元和飞行单元,机体内设置有PLC控制器;
悬挂单元:包含有连接板、安装螺栓、安装架、电机安装板、电机、转轴、滑轮、电液推杆一、放置架和辅助轮,所述安装架设置在机体的上表面,安装架的两侧底端分别设置有连接板,所述连接板的上表面设置有安装螺栓,所述安装架上设置有电机安装板,所述电机安装板的上表面设置有电机,所述电机的输出轴连接有转轴,所述转轴转动连接安装架,转轴上套接有滑轮,所述电液推杆一设置在机体的上表面,电液推杆一的上端设置有放置架,所述放置架上转动连接有辅助轮,电机和电动推杆一的输入端电连接PLC控制器的输出端。
整体设置在机体上,通过飞行单元带动机体上升,使得滑轮悬挂在需要巡检的输电线上,通过PLC控制器控制电动推杆一工作,电动推杆一带动放置架上升,放置架带动辅助轮上升,辅助轮配合滑轮卡接在输电线上,通过PLC控制器控制电机工作,电机带动转轴转动,转轴带动滑轮滑动,从而使得机体沿着输电线移动,通过录像单元对输电线进行拍摄检测。
进一步的,所述滑轮和辅助轮均为绝缘材质,可采用复合云母制作,通过使用绝缘材料制作滑轮和辅助轮,避免无人机巡检设备受到输电线的影响。
进一步的,所述录像单元包含有安装座、安装板、摄像机和调节组件,所述安装板共两个且均设置在机体的上表面,两个安装板之间活动连接有安装板,所述安装板的下表面设置有调节组件,安装板的上表面设置有摄像机,摄像机的输出端电连接PLC控制器的输入端,通过调节组件调整安装板的角度,从而对摄像机的拍摄角度进行调整,通过摄像机对输电线进行拍摄,并把结果传输进PLC控制器中。
进一步的,所述调节组件包含有U型架和电动推杆二,所述U型架共两个且分别设置在安装板和机体上,两个U型架之间设置有电动推杆二,电动推杆二的输入端电连接PLC控制器的输出端,通过PLC控制器控制电动推杆二工作,电动推杆二带动U型架移动,U型架带动安装板进行移动,从而对安装板的角度进行调整。
进一步的,所述飞行单元包含有连接轴、力臂、连接柱、卡接槽、连接箱和动力组件,所述连接轴设置在安装环上,连接轴转动连接力臂,所述力臂上开设有卡接槽,所述卡接槽设置有连接柱,所述力臂连接有连接箱,所述连接箱内设置有动力组件,动力组件带动连接箱运动,连接箱通过力臂带动机体进行移动,当不使用时,把力臂绕连接轴转动,卡接槽卡接在安装环上,连接箱卡接在放置槽内,便于机体的收纳。
进一步的,所述动力组件包含有旋转电机、转盘和机翼,所述旋转电机设置在连接箱内,旋转电机的输出轴转动连接连接箱,旋转电机的输出轴连接有转盘,所述转盘上设置有机翼,旋转电机的输入端电连接PLC控制器的输出端,通过PLC控制器控制旋转电机工作,旋转电机带动转盘转动,转盘带动机翼转动,从而带动连接箱移动。
进一步的,还包括磁铁和磁铁吸条,所述磁铁设置在放置槽内,所述磁铁吸条设置在连接箱上,通过磁铁和磁铁吸条相互吸附,使得连接箱固定在放置槽内。
进一步的,还包括蓄电池,所述蓄电池设置在机体内,蓄电池的输出端电连接PLC控制器的输入端,通过蓄电池为整个无人机巡检设备提供动力。
进一步的,还包括支柱和底座,所述支柱共四个且均设置在机体的下表面,四个支柱的下端分别设置有底座,通过支柱和底座对机体进行支撑,便于机体的提升。
进一步的,还包括锁紧螺杆,所述锁紧螺杆设置在力臂上,锁紧螺杆螺纹连接安装环,通过锁紧螺杆把力臂固定在安装环上。
与现有技术相比,本发明的有益效果是:具有以下好处:
1、把滑轮挂在需要检修的输电线上,辅助轮和滑轮配合卡接在输电线上,通过电机带动滑轮转动,从而带动整个无人机巡检设备移动,完成对输电线的巡检,减少无人机巡检设备电力的浪费,提高巡航时长;
2、通过摄像机对输电线进行拍摄,对输电线的实际情况进行记录,通过电动推杆二带动U型架移动,U型架带动安装板移动,从而改变摄像机的角度,使得摄像机能够对周围环境和输电线进行有效拍摄,提高检修的效率;
3、力臂能够围绕力臂转动,卡接槽能够卡接在安装环上,且连接箱能够放置在放置槽,提高了无人机巡检设备收纳时的便捷性,便于无人机巡检设备的携带移动,且能减少使用时拆卸对无人机巡检设备的损伤,延长使用寿命;
4、通过磁铁和磁铁吸条相互吸附能够使得连接箱固定在卡接槽内,提高了无人机巡检设备收纳时的稳定,避免无人机巡检设备在移动的过程中发生晃动,对无人机巡检设备形成保护。
附图说明
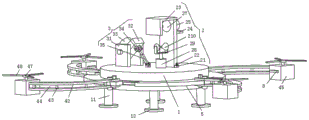
图1为本发明结构示意图;
图2为本发明侧面结构示意图;
图3为本发明剖面结构示意图。
图中:1机体、2悬挂单元、21连接板、22安装螺栓、23安装架、24电机安装板、25电机、26转轴、27滑轮、28电动推杆一、29放置架、210辅助轮、3录像单元、31安装座、32安装板、33摄像机、34 U型架、35电动推杆二、4飞行单元、41连接轴、42力臂、43连接柱、44卡接槽、45连接箱、46旋转电机、47转盘、48机翼、5安装环、6放置槽、7磁铁、8磁铁吸条、9 PLC控制器、10蓄电池、11支柱、12底座、13锁紧螺杆。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-3,本实施例提供一种技术方案:一种输电线无人机巡检设备,包括机体1和悬挂单元2;
机体1:外表面设置有安装环5,安装环5上设置有放置槽6,机体1上设置有录像单元3和飞行单元4,机体1内设置有PLC控制器9;
悬挂单元2:包含有连接板21、安装螺栓22、安装架23、电机安装板24、电机25、转轴26、滑轮27、电液推杆一28、放置架29和辅助轮210,安装架23设置在机体1的上表面,安装架23的两侧底端分别设置有连接板21,连接板21的上表面设置有安装螺栓22,安装架23上设置有电机安装板24,电机安装板24的上表面设置有电机25,电机25的输出轴连接有转轴26,转轴26转动连接安装架23,转轴26上套接有滑轮27,电液推杆一28设置在机体1的上表面,电液推杆一28的上端设置有放置架29,放置架29上转动连接有辅助轮210,电机25和电动推杆一28的输入端电连接PLC控制器9的输出端。
整体设置在机体1上,通过飞行单元4带动机体1上升,使得滑轮27悬挂在需要巡检的输电线上,通过PLC控制器9控制电动推杆一28工作,电动推杆一28带动放置架29上升,放置架29带动辅助轮210上升,辅助轮210配合滑轮27卡接在输电线上,通过PLC控制器9控制电机25工作,电机25带动转轴26转动,转轴26带动滑轮27滑动,从而使得机体1沿着输电线移动,通过录像单元3对输电线进行拍摄检测。
滑轮27和辅助轮210均为绝缘材质,可采用复合云母制作,通过使用绝缘材料制作滑轮27和辅助轮210,避免无人机巡检设备受到输电线的影响。
录像单元3包含有安装座31、安装板32、摄像机33和调节组件,安装板32共两个且均设置在机体1的上表面,两个安装板32之间活动连接有安装板32,安装板32的下表面设置有调节组件,安装板32的上表面设置有摄像机33,摄像机33的输出端电连接PLC控制器9的输入端,通过调节组件调整安装板32的角度,从而对摄像机33的拍摄角度进行调整,通过摄像机33对输电线进行拍摄,并把结果传输进PLC控制器9中。
调节组件包含有U型架34和电动推杆二35,U型架34共两个且分别设置在安装板32和机体1上,两个U型架34之间设置有电动推杆二35,电动推杆二35的输入端电连接PLC控制器9的输出端,通过PLC控制器9控制电动推杆二35工作,电动推杆二35带动U型架34移动,U型架34带动安装板32进行移动,从而对安装板32的角度进行调整。
飞行单元4包含有连接轴41、力臂42、连接柱43、卡接槽44、连接箱45和动力组件,连接轴41设置在安装环5上,连接轴41转动连接力臂42,力臂42上开设有卡接槽44,卡接槽44设置有连接柱43,力臂42连接有连接箱45,连接箱45内设置有动力组件,动力组件带动连接箱45运动,连接箱45通过力臂42带动机体1进行移动,当不使用时,把力臂42绕连接轴41转动,卡接槽44卡接在安装环5上,连接箱45卡接在放置槽6内,便于机体1的收纳。
动力组件包含有旋转电机46、转盘47和机翼48,旋转电机46设置在连接箱45内,旋转电机46的输出轴转动连接连接箱45,旋转电机46的输出轴连接有转盘47,转盘47上设置有机翼48,旋转电机46的输入端电连接PLC控制器9的输出端,通过PLC控制器9控制旋转电机46工作,旋转电机46带动转盘47转动,转盘47带动机翼48转动,从而带动连接箱45移动。
还包括磁铁7和磁铁吸条8,磁铁7设置在放置槽6内,磁铁吸条8设置在连接箱45上,通过磁铁7和磁铁吸条8相互吸附,使得连接箱45固定在放置槽6内。
还包括蓄电池10,蓄电池10设置在机体1内,蓄电池10的输出端电连接PLC控制器9的输入端,通过蓄电池10为整个无人机巡检设备提供动力。
还包括支柱11和底座12,支柱11共四个且均设置在机体1的下表面,四个支柱11的下端分别设置有底座12,通过支柱11和底座12对机体1进行支撑,便于机体1的提升。
还包括锁紧螺杆13,锁紧螺杆13设置在力臂42上,锁紧螺杆13螺纹连接安装环5,通过锁紧螺杆13把力臂42固定在安装环5上。
本发明提供的一种输电线无人机巡检设备的工作原理如下:通过锁紧螺杆13把力臂42固定在安装环5上,把无人机巡检设备放置在地面上,通过PLC控制器9控制旋转电机46工作,旋转电机46带动转盘47转动,转盘47带动机翼48转动,从而带动连接箱45移动,连接箱45通过力臂42带动机体1进行移动,机体1带动悬挂单元2上升,使得滑轮27悬挂在需要巡检的输电线上,通过PLC控制器9控制电动推杆一28工作,电动推杆一28带动放置架29上升,放置架29带动辅助轮210上升,辅助轮210配合滑轮27卡接在输电线上,通过PLC控制器9控制电机25工作,电机25带动转轴26转动,转轴26带动滑轮27滑动,从而使得机体1沿着输电线移动,通过PLC控制器9控制电动推杆二35工作,电动推杆二35带动U型架34移动,U型架34带动安装板32进行移动,安装板32带动摄像机33,从而对摄像机33的角度进行调整,通过摄像机33对输电线进行拍摄检测,并把结果传输进PLC控制器9中,完成对输电线的巡检,当巡检完成后,松开锁紧螺杆13,转动力臂42,使得卡接槽44卡接在安装环5上,连接箱45卡接在放置槽6内,通过磁铁7和磁铁吸条8相互吸附,使得连接箱45固定在放置槽6内,使得无人机巡检设备便于收纳。
值得注意的是,以上实施例中所公开的电动推杆一28可采用具体型号为IP800,摄像机33可采用微型检测摄像机,电动推杆二35可采用具体型号为IP40X,电机25和旋转电机46可采用具体型号为SZ-60S,PLC控制器9控制电机25、电动推杆一28、电动推杆二35和旋转电机46工作采用现有技术中常用的方法。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
Claims (10)
1.一种输电线无人机巡检设备,其特征在于:包括机体(1)和悬挂单元(2);
机体(1):外表面设置有安装环(5),所述安装环(5)上设置有放置槽(6),所述机体(1)上设置有录像单元(3)和飞行单元(4),机体(1)内设置有PLC控制器(9);
悬挂单元(2):包含有连接板(21)、安装螺栓(22)、安装架(23)、电机安装板(24)、电机(25)、转轴(26)、滑轮(27)、电液推杆一(28)、放置架(29)和辅助轮(210),所述安装架(23)设置在机体(1)的上表面,安装架(23)的两侧底端分别设置有连接板(21),所述连接板(21)的上表面设置有安装螺栓(22),所述安装架(23)上设置有电机安装板(24),所述电机安装板(24)的上表面设置有电机(25),所述电机(25)的输出轴连接有转轴(26),所述转轴(26)转动连接安装架(23),转轴(26)上套接有滑轮(27),所述电液推杆一(28)设置在机体(1)的上表面,电液推杆一(28)的上端设置有放置架(29),所述放置架(29)上转动连接有辅助轮(210),电机(25)和电液推杆一(28)的输入端电连接PLC控制器(9)的输出端。
2.根据权利要求1所述的一种输电线无人机巡检设备,其特征在于:所述滑轮(27)和辅助轮(210)均为绝缘材质。
3.根据权利要求1所述的一种输电线无人机巡检设备,其特征在于:所述录像单元(3)包含有安装座(31)、安装板(32)、摄像机(33)和调节组件,所述安装板(32)共两个且均设置在机体(1)的上表面,两个安装板(32)之间活动连接有安装板(32),所述安装板(32)的下表面设置有调节组件,安装板(32)的上表面设置有摄像机(33),摄像机(33)的输出端电连接PLC控制器(9)的输入端。
4.根据权利要求3所述的一种输电线无人机巡检设备,其特征在于:所述调节组件包含有U型架(34)和电液推杆二(35),所述U型架(34)共两个且分别设置在安装板(32)和机体(1)上,两个U型架(34)之间设置有电液推杆二(35),电液推杆二(35)的输入端电连接PLC控制器(9)的输出端。
5.根据权利要求1所述的一种输电线无人机巡检设备,其特征在于:所述飞行单元(4)包含有连接轴(41)、力臂(42)、连接柱(43)、卡接槽(44)、连接箱(45)和动力组件,所述连接轴(41)设置在安装环(5)上,连接轴(41)转动连接力臂(42),所述力臂(42)上开设有卡接槽(44),所述卡接槽(44)设置有连接柱(43),所述力臂(42)连接有连接箱(45),所述连接箱(45)内设置有动力组件。
6.根据权利要求5所述的一种输电线无人机巡检设备,其特征在于:所述动力组件包含有旋转电机(46)、转盘(47)和机翼(48),所述旋转电机(46)设置在连接箱(45)内,旋转电机(46)的输出轴转动连接连接箱(45),旋转电机(46)的输出轴连接有转盘(47),所述转盘(47)上设置有机翼(48),旋转电机(46)的输入端电连接PLC控制器(9)的输出端。
7.根据权利要求1所述的一种输电线无人机巡检设备,其特征在于:还包括磁铁(7)和磁铁吸条(8),所述磁铁(7)设置在放置槽(6)内,所述磁铁吸条(8)设置在连接箱(45)上。
8.根据权利要求1所述的一种输电线无人机巡检设备,其特征在于:还包括蓄电池(10),所述蓄电池(10)设置在机体(1)内,蓄电池(10)的输出端电连接PLC控制器(9)的输入端。
9.根据权利要求1所述的一种输电线无人机巡检设备,其特征在于:还包括支柱(11)和底座(12),所述支柱(11)共四个且均设置在机体(1)的下表面,四个支柱(11)的下端分别设置有底座(12)。
10.根据权利要求5所述的一种输电线无人机巡检设备,其特征在于:还包括锁紧螺杆(13),所述锁紧螺杆(13)设置在力臂(42)上,锁紧螺杆(13)螺纹连接安装环(5)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111160308.9A CN113697119A (zh) | 2021-10-03 | 2021-10-03 | 一种输电线无人机巡检设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111160308.9A CN113697119A (zh) | 2021-10-03 | 2021-10-03 | 一种输电线无人机巡检设备 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN113697119A true CN113697119A (zh) | 2021-11-26 |
Family
ID=78662441
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111160308.9A Pending CN113697119A (zh) | 2021-10-03 | 2021-10-03 | 一种输电线无人机巡检设备 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113697119A (zh) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107226195A (zh) * | 2017-04-28 | 2017-10-03 | 青岛高智高新科技有限公司 | 一种无人机机翼定位精确锁定装置 |
| CN108995797A (zh) * | 2018-07-17 | 2018-12-14 | 河南聚合科技有限公司 | 一种可穿戴折叠式氢燃料混合动力四旋翼飞行器 |
| CN210567174U (zh) * | 2019-09-21 | 2020-05-19 | 王振伟 | 一种建筑安全用监视装置 |
| CN212099341U (zh) * | 2020-03-31 | 2020-12-08 | 深圳市书呆科技有限公司 | 一种折叠式多旋翼救援无人机 |
| CN112874759A (zh) * | 2021-02-25 | 2021-06-01 | 中国南方电网有限责任公司超高压输电公司贵阳局 | 便携式电网巡检用无人机 |
| CN112977819A (zh) * | 2021-03-10 | 2021-06-18 | 鲁东大学 | 一种包含双机的输电线路巡检飞行机器人 |
| CN213746020U (zh) * | 2020-11-25 | 2021-07-20 | 保定尚品电子科技有限公司 | 摄像机安装支架 |
| CN113270814A (zh) * | 2021-07-20 | 2021-08-17 | 四川华东电气集团有限公司 | 一种基于智能无人机技术的高压输电线检修线缆滑行装置 |
-
2021
- 2021-10-03 CN CN202111160308.9A patent/CN113697119A/zh active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107226195A (zh) * | 2017-04-28 | 2017-10-03 | 青岛高智高新科技有限公司 | 一种无人机机翼定位精确锁定装置 |
| CN108995797A (zh) * | 2018-07-17 | 2018-12-14 | 河南聚合科技有限公司 | 一种可穿戴折叠式氢燃料混合动力四旋翼飞行器 |
| CN210567174U (zh) * | 2019-09-21 | 2020-05-19 | 王振伟 | 一种建筑安全用监视装置 |
| CN212099341U (zh) * | 2020-03-31 | 2020-12-08 | 深圳市书呆科技有限公司 | 一种折叠式多旋翼救援无人机 |
| CN213746020U (zh) * | 2020-11-25 | 2021-07-20 | 保定尚品电子科技有限公司 | 摄像机安装支架 |
| CN112874759A (zh) * | 2021-02-25 | 2021-06-01 | 中国南方电网有限责任公司超高压输电公司贵阳局 | 便携式电网巡检用无人机 |
| CN112977819A (zh) * | 2021-03-10 | 2021-06-18 | 鲁东大学 | 一种包含双机的输电线路巡检飞行机器人 |
| CN113270814A (zh) * | 2021-07-20 | 2021-08-17 | 四川华东电气集团有限公司 | 一种基于智能无人机技术的高压输电线检修线缆滑行装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111106568B (zh) | 一种电力线路周围杂物旋转式清除专用工具 | |
| CN106887807A (zh) | 用于架空输电线路的巡线机器人 | |
| CN214110320U (zh) | 一种可多角度调节的机械加工用工作台 | |
| CN110588976A (zh) | 一种高空作业电缆除冰无人机 | |
| CN111404083A (zh) | 一种基于综合导航的输电线路巡视机器人及其巡线方法 | |
| CN110386249B (zh) | 一种无人机电力线巡检装置及其巡检方法 | |
| CN112265638A (zh) | 一种地形测绘用无人机 | |
| CN116551258A (zh) | 一种航模机架设计加工用焊接设备 | |
| CN113697119A (zh) | 一种输电线无人机巡检设备 | |
| CN212169661U (zh) | 一种数控加工中心用固定夹具 | |
| CN207191410U (zh) | 一种多旋翼无人机 | |
| CN214224114U (zh) | 一种基于三维智能监测的无人机测量装置 | |
| CN213343180U (zh) | 一种用于铁路电网运行监测系统的控制装置 | |
| CN204746921U (zh) | 一种转子清洁机器人 | |
| CN113997262A (zh) | 一种陆空巡检机器人及其工作方法 | |
| CN206827011U (zh) | 一种自动上袋机 | |
| CN212497380U (zh) | 一种用于飞机轮毂维修专用工具 | |
| CN211726891U (zh) | 一种输变电设备绝缘子零值检测清扫机器人机械抓手 | |
| CN209051588U (zh) | 一种新型无人机 | |
| CN114073881A (zh) | 一种汽车零部件焊接用除尘装置 | |
| CN113771979A (zh) | 反推力吸附的爬壁机器人 | |
| CN113606463A (zh) | 一种植物图像采集装置的固定支架 | |
| CN219790530U (zh) | 一种飞机腹鳍装配型架 | |
| CN214978732U (zh) | 一种铝材加工用具有散热结构的焊接装置 | |
| CN220048788U (zh) | 一种光伏组件生产用自动装框设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20211126 |
|
| RJ01 | Rejection of invention patent application after publication |