CN113682850A - 一种无动力跨轨抑尘小车的智能抑尘作业方法 - Google Patents
一种无动力跨轨抑尘小车的智能抑尘作业方法 Download PDFInfo
- Publication number
- CN113682850A CN113682850A CN202111089833.6A CN202111089833A CN113682850A CN 113682850 A CN113682850 A CN 113682850A CN 202111089833 A CN202111089833 A CN 202111089833A CN 113682850 A CN113682850 A CN 113682850A
- Authority
- CN
- China
- Prior art keywords
- trolley
- dust suppression
- dust
- track
- rail
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G69/00—Auxiliary measures taken, or devices used, in connection with loading or unloading
- B65G69/18—Preventing escape of dust
- B65G69/185—Preventing escape of dust by means of non-sealed systems
- B65G69/188—Preventing escape of dust by means of non-sealed systems with spraying means
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Platform Screen Doors And Railroad Systems (AREA)
Abstract
本发明提出了一种无动力跨轨抑尘小车的智能抑尘作业方法,使轨道动力设备移动至小车拖挂位置,将抑尘小车的推拉杆与轨道动力设备连接,将导向轮与轨道连接,轨道动力设备驱动小车运行至作业位置,固定小车的位置,断开推拉杆与轨道动力设备的连接;射雾器连接水管和电缆,控制系统上电,智能选择抑尘模式,进行扬尘监控和扬尘点跟踪,实现射雾器智能抑尘;抑尘结束后,由轨道动力设备推动小车后退入库,抑尘小车回到初始的小车存放区。本发明的抑尘小车可借用带轨道的机械设备的其中一个轨道的运行空间,跟随轨道动力设备一同移动和作业,可以最近距离的实现对场内进行作业辐射;且小车借用轨道动力设备的动力为运行动力,无需外加动力。
Description
技术领域
本发明属于射雾器小车领域,具体涉及一种无动力跨轨抑尘小车的智能抑尘作业方法。
背景技术
在生产生活中,有一些带有轨道的机械设备(比如龙门吊车、斗轮机、装船机等)在一定范围的作业区域沿两侧轨道往返移动,另外在有些情况需要在这些轨道设备的作业点完成一些辅助动作(比如对斗轮机工作时产生的扬尘进行抑制作业)。然而辅助设备在现场安装布置空间受限,在带轨道的机械设备作业范围以外无法满足其自身的辅助作业的辐射范围。
为解决上述问题,第一种措施是可在带轨道的机械设备作业范围以外,通过加大辅助设备的数量向场地内辐射;第二种措施是通过专用设备或车辆将辅助设备运到场地内使用。第一种措施不仅无法全面覆盖至整个场地,而且辅助设备的投资成本和运行成本都太高,造成极大浪费。第二种措施因大多场地未经地面硬化处理,辅助设备很难到达适合位置,而且在场地内会严重影响其他设备的安全运行,极易造成事故,导致主作业设备或辅助作业设备的损坏。
发明内容
本发明旨在解决现有技术中存在的技术问题,本发明的目的是提供一种无动力跨轨抑尘小车的智能抑尘作业方法。
为达到上述目的,本发明采用如下技术方案:一种无动力跨轨抑尘小车的智能抑尘作业方法,抑尘小车包括承载车体和设在承载车体上的射雾器,承载车体包括车架,车架底部安装有可沿轨道行驶的导向轮,车架上安装有车轮,车架上还连接有推拉杆,推拉杆远离车架的一端能够与轨道动力设备连接;
智能抑尘作业方法包括如下过程:初始时,抑尘小车位于小车存放区,使轨道动力设备移动至小车拖挂位置,将抑尘小车的推拉杆与轨道动力设备连接,轨道动力设备拖动抑尘小车出库,此时抑尘小车通过车轮在地面行进,导向轮悬空;将导向轮与轨道连接,轨道动力设备拖动抑尘小车使导向轮在轨道上运行,轨道动力设备驱动抑尘小车运行至作业位置,并固定抑尘小车的位置,断开推拉杆与轨道动力设备的连接;射雾器连接水管和电缆,控制系统上电,智能选择抑尘模式,进行扬尘监控和扬尘点跟踪,实现射雾器智能抑尘;抑尘结束后,断开射雾器与水管和电缆的连接,使轨道动力设备移动至小车拖挂位置,将抑尘小车的推拉杆与轨道动力设备连接,解开抑尘小车位置的固定,轨道动力设备驱动抑尘小车使导轮在轨道上运行,轨道动力设备推动抑尘小车后退入库,断开推拉杆与轨道动力设备的连接,抑尘小车回到初始的小车存放区。
上述技术方案中,抑尘小车(以下简称小车)通过推拉杆与轨道动力设备连接,借用轨道动力设备的动力为运行动力,无需外加动力。本发明的小车可借用带轨道的机械设备的其中一个轨道的运行空间,跟随轨道动力设备(比如斗轮机、龙门吊车、装船机等)一同移动和作业,可以最近距离的实现对场内进行作业辐射。抑尘小车进行抑尘工作时,对抑尘小车的位置进行固定,可避免因抑尘小车的承载车体的移动而使射雾器喷口位置偏移;而且抑尘小车进行抑尘工作时,抑尘小车与轨道动力设备断开连接,不影响轨道动力设备的作业。
在本发明的一种优选实施方式中,导向轮包括与车架连接的导向支架、以及能够在轨道上运行的且可转动安装在导向支架上的导轮,导向支架上部的两端均设置有转轴孔,车架上设有与转轴孔对应的夹耳,导向支架通过转轴孔与夹耳活动连接;抑尘小车出库时,顶起抑尘小车,通过摆动导向支架使导轮运动至轨道正上方,再使抑尘小车回落,导轮与轨道配合,轨道动力设备驱动导轮在轨道上运行;抑尘小车入库时,顶起抑尘小车,通过摆动导向支架使导轮远离轨道,再使抑尘小车回落,轨道动力设备推动抑尘小车后退入库。
上述技术方案中,当该抑尘小车不在轨道上运行时,可移开或取下导轮,使该抑尘小车可作为在地面运行的小车。
在本发明的一种优选实施方式中,导向轮的数量为两个,两个导向轮分别设在车架的前端和后端;抑尘小车出库时,顶起抑尘小车的前部,通过摆动前侧的导向支架使前侧导轮运动至轨道正上方,再使抑尘小车的前部回落,前侧的导轮与轨道配合;顶起抑尘小车的后部,通过摆动后侧的导向支架使后侧导轮运动至轨道正上方,再使抑尘小车的后部回落,后侧的导轮与轨道配合;抑尘小车入库时,顶起抑尘小车的后部,通过摆动后侧的导向支架使后侧导轮远离轨道,再使抑尘小车的后部回落;顶起抑尘小车的前部,通过摆动前侧的导向支架使前侧导轮远离轨道,再使抑尘小车的前部回落。
上述技术方案中,在车架的一前一后各设置一个导向轮,两个导向轮同时在一根轨道上运行,使小车的运行更平稳。
在本发明的一种优选实施方式中,导向支架的转轴孔与夹耳通过销活动连接,且其中一个销为固定销,另一个销为便于取出的活动销;抑尘小车出库时,绕固定销转动导向支架使导轮运动至轨道正上方,将活动销插入至夹耳和转轴孔的同心孔内,实现导向轮与车架的固定,再使抑尘小车回落;抑尘小车入库时,取出活动销,绕固定销转动导向支架使导轮远离轨道,再使抑尘小车回落。
上述技术方案中,由此取下活动销后,相对固定销转动导向支架便可移开导向轮。
在本发明的一种优选实施方式中,车架上还固接有能够与活动销插接配合的带孔支架,带孔支架的孔中心至固定销中心的距离与两个转轴孔之间的中心距相等;抑尘小车出库前,活动销插入带孔支架和转轴孔的同心孔内;抑尘小车出库时,取出活动销,绕固定销转动导向支架使导轮运动至轨道正上方后,再将活动销插入夹耳和转轴孔的同心孔内;抑尘小车入库时,取出活动销,绕固定销转动导向支架使导轮远离轨道,再将活动销插入带孔支架和转轴孔的同心孔内。
上述技术方案中,由此移走导向轮后,导向支架远离固定销一端的转轴孔通过活动销与带孔支架连接,固定导向轮的位置,避免导向轮松动乱晃,提高安全性。
在本发明的另一种优选实施方式中,车架上还设有若干个支撑腿,支撑腿能够顶起车架,支撑腿能够锚定于轨道或地面;抑尘小车出库时,通过伸展支撑腿以顶起车架,导轮与轨道配合后,支撑腿收回;射雾器进行抑尘工作时,支撑腿锚定于轨道或地面,以固定抑尘小车的位置;抑尘工作结束后,支撑腿收回,解开抑尘小车位置的固定;抑尘小车入库时,通过伸展支撑腿以顶起车架,导轮与远离轨道后,支撑腿收回。
上述技术方案中,在该小车到达作业位置后,车架通过支撑腿锚定于轨道或地面,实现该小车位置的固定;在小车出库和入库过程中,支撑腿还用于顶起车架,便于导轮与轨道的连接或断开。
在本发明的另一种优选实施方式中,车架上还设有沿车架宽度方向延伸的支撑腿滑道,支撑腿可在支撑腿滑道上滑动;顶起车架时,支撑腿在支撑腿滑道上滑行至轨道的正上方,伸展支撑腿后,支撑腿的下端与轨道抵紧;收回支撑腿后,支撑腿在支撑腿滑道上滑行至轨道的外侧。
上述技术方案中,通过设置支撑腿滑道,在支撑腿向远离轨道的方向滑行时,断开支撑腿与轨道的连接;在支撑腿向靠近轨道的方向滑行时,使支撑腿与轨道连接。
在本发明的另一种优选实施方式中,射雾器具有手控抑尘模式和智控抑尘模式。设置两种抑尘模式,便于精确调整射雾器喷口的位置,提高抑尘效果。
在本发明的另一种优选实施方式中,在采用手控抑尘模式时;将抑尘喷口调整至扬尘点附近,启动抑尘;调整至抑尘状态;当扬尘点移动时, 跟随扬尘点调整抑尘喷口;工作结束,调整风筒收回至可移动状态。
在本发明的另一种优选实施方式中,在采用智控抑尘模式时;将抑尘喷口调整至扬尘点附近;启动视频追踪,同时进行扬尘监控和扬尘点跟踪;在扬尘点跟踪过程中,采集扬尘点图像,根据扬尘点图像移动抑尘喷口与扬尘点的相对偏差,并自动调整缩小偏差,根据喷出喷雾的风速风向换算抑尘喷口与扬尘点的偏移值,并自动调整缩小偏差。
上述技术方案中,通过视频追踪,同时进行扬尘监控和扬尘点跟踪,并根据扬尘点跟踪情况实时调整抑尘喷口与抑尘点的偏差,提高抑尘效果。
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
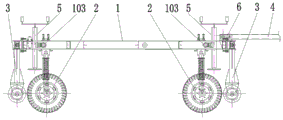
图1是实施例一的一种无动力跨轨作业小车的主视结构示意图。
图2是实施例一的一种无动力跨轨作业小车的俯视结构示意图。
图3是图1的左视图。
图4是实施例一中的车轮的结构示意图。
图5是实施例一中的异物分流板与车轮连接的主视示意图。
图6是实施例一中的异物分流板与车轮连接的俯视示意图。
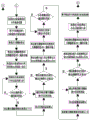
图7是本申请实施例三的抑尘小车的智能抑尘作业方法的第一部分流程图。
图8是本申请实施例三的抑尘小车的智能抑尘作业方法的第二部分流程图。
图9是本申请实施例三的抑尘小车的智能抑尘作业方法的第三部分流程图。
图10是本申请实施例三的抑尘小车的智能抑尘作业方法的第四部分流程图。
其中,图7中的流程线连接点A与图8中的流程线连接点A相连;
图8中的流程线连接点B与图9中的流程线连接点B相连;
图9中的流程线连接点C与图10中的流程线连接点C相连;
图10中的流程线连接点D与图8中的流程线连接点D相连;
图10中的流程线连接点E与图7中的流程线连接点E相连。
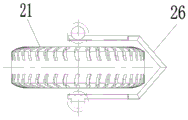
说明书附图中的附图标记包括:车架1、夹耳101、带孔支架102、支撑腿滑道103、车轮2、车轮本体21、支撑架22、导套221、导杆222、减震弹簧223、下转向调整板23、上转向调整板24、高低调整单元25、滑杆251、滑套252、条形槽252a、横插螺栓253、异物分流板26、紧固螺栓27、导向轮3、导轮31、导向支架32、转轴孔32a、固定销33、活动销34、推拉杆4、支撑腿5、连接座6。
具体实施方式
下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“竖向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,除非另有规定和限定,需要说明的是,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,也可以通过中间媒介间接相连,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
实施例一
本实施例供了一种无动力跨轨作业小车,如图1所示,在本发明的一种优选实施方式中,其包括车架1,车架1底部安装有可沿轨道行驶的导向轮3,比如导向轮3的数量为两个,两个导向轮3分别设在车架1的前端和后端。车架1上安装有车轮2,在车架1的一侧或者两侧设置车轮2;当在车架1一侧设置车轮2时,车轮2和导向轮3分别位于车架1的两侧;当在车架1的两侧设置车轮2时,导向轮3位于车架1宽度方向中间的中心线上,车轮2对称的设在车架1中心线的两侧,图2所示为设置四个车轮2,车架1的前端设置两个车轮2,车架1的后端设置两个车轮2。
车架1的前端还连接有推拉杆4,推拉杆4远离车架1的一端与轨道动力设备连接,比如用挂扣卡接。车架1上设有连接座6,推拉杆4与连接座6连接,推拉杆4可相对车架1上下摆动和水平摆动,比如连接座6为铰接座,推拉杆4与铰接座球铰连接。也可将推拉杆4与连接座6固接,连接座6与车架1铰接;或者推拉杆4和连接座6均可相对车架1上下摆动和水平摆动。
本发明以在斗轮机的轨道上使用该跨轨作业小车为例进行说明,将导向轮3卡设在其中一根轨道上,使该作业小车骑跨于斗轮机一侧轨道,然后将推拉杆4与斗轮机连接。斗轮机行走时通过导向轮3保证该作业小车沿轨道行走,同时作业小车的主要重量由导向轮3承受,车轮2在地面滚动,四角下方的四个车轮2用来保证作业小车的平衡及辅助承载。该作业小车在斗轮机的牵引下到达作业位置后,断开推拉杆4与斗轮机的连接,作业小车上的辅助作业设备(比如射雾器)进行作业。
需要说明的是,当轨道位置相对地面具有一定高度,车轮2无法与地面接触时,车轮2仅用来保证作业小车的平衡。
如图4所示,在一种实施方式中,车轮2包括与车架1连接的支撑架22、以及可转动安装在支撑架22上的车轮本体21。优选支撑架22为减震支架,在车轮本体21的两侧各设一个减震支架,比如减震支架包括导套221和插入导套221中并可在导套221中竖向滑动的导杆222,导套221和导杆222组成伸缩杆,导套221与车轮本体21连接,导杆222连接至车架1。伸缩杆外套设有减震弹簧223,减震弹簧223的两端分别由导套221和导杆222上的台阶限位。当然支撑架22也可采用现有技术中的其他具有减震性的结构,比如具有弹性套筒、橡胶垫、弹片等结构的支架。
如图5和图6所示,在另一种实施方式中,车轮本体21运行的前侧设置有与支撑架22固接的异物分流板26,异物分流板26从前端夹设在车轮本体21的两侧,异物分流板26的两侧通过螺栓与支撑架22两侧的两个导套221分别固接。
如图4所示,在另一优选的实施方式中,支撑架22与车架1之间还设有下转向调整板23、上转向调整板24和紧固件,下转向调整板23与支撑架22的导杆222的上端固接,上转向调整板24与车架1连接,下转向调整板23可相对上转向调整板24水平转动,且下转向调整板23和上转向调整板24由紧固件固定连接。比如紧固件为紧固螺栓27,设置两颗紧固螺栓27,下转向调整板23上设有与紧固螺栓27配合的两个螺纹孔,上转向调整板24上设有两个弧形槽,紧固螺栓27可在弧形槽中滑动,弧形槽的圆心与下转向调整板23的旋转中心同心,紧固螺栓27穿过弧形槽与下转向调整板23上的螺纹孔连接。
以轨道为直线轨道为例进行说明,当四个车轮2不能保持沿轨道直线行驶时,拧松紧固螺栓27,人们相对上转向调整板24水平转动下转向调整板23,车轮本体21随下转向调整板23水平转动,车轮本体21调整至合适角度后,拧紧紧固螺栓27。
如图4所示,在另一优选的实施方式中,支撑架22与车架1之间设有可相对车架1调整车轮本体21高度的高低调整单元25。比如高低调整单元25包括与上转向调整板24固接的滑杆251,滑杆251外套设有与之竖向滑动连接的滑套252,滑套252与车架1通过螺栓固定连接。滑套252的外壁上开设有两条竖向设置的条形槽252a,两条条形槽252a以滑套252的中心对称设置,横插螺栓253从滑套252的一侧穿过条形槽252a和滑杆251,并从滑套252另一侧的条形槽252a穿出,并用螺母锁紧。需要说明的是高低调整单元25也可采用现有技术中的伸缩气杆或者电动伸缩杆。
在使用场地四个车轮2与轨道相对高度不合适时,拧松横插螺栓253上的螺母,然后在对应的滑套252中上下滑动滑杆251,车轮本体21随滑杆251上下运动,车轮本体21调整至合适高度后,再拧紧横插螺栓253上的螺母。
在另一优选的实施方式中,导向轮3与车架1可拆卸的固定连接。具体地,如图2和图3所示,导向轮3包括与车架1连接的导向支架32、以及能够在轨道上运行的且可转动安装在导向支架32上的导轮31。导向支架32为“T”字型结构,导向支架32两侧设置三角形加强肋板。导向支架32上部的两端均设置有转轴孔32a,车架1上设有与转轴孔32a对应的夹耳101,两个导向轮3处各设置两个夹耳101,共四个夹耳101,导向支架32通过转轴孔32a与夹耳101活动连接。
如图3所示,夹耳101具有上下相对设置的两个耳片,导向支架32上部的端部插入夹耳101的两个耳片之间,导向支架32的转轴孔32a与夹耳101通过销活动连接,且其中一个销为固定销33,另一个销为便于取出的活动销34,比如图3所示的左侧为活动销34,右侧为固定销33。
当不需要该作业小车在轨道上运行时,其可作为普通载物小车使用,具体可取下活动销34,然后使导向支架32相对固定销33转动,将导向轮3转到旁边去,从车架1底部的中间将导向轮3移开。
如图2所示,在另一优选的实施方式中,车架1上还固接有能够与活动销34插接配合的带孔支架102,带孔支架102的孔中心至固定销33中心的距离与导向支架33两端的两个转轴孔32a之间的中心距相等。需要将导向轮3移开时,使导向支架32相对固定销33转动,导向支架32远离固定销33一端的转轴孔32a通过活动销34与带孔支架102连接,固定导向轮3的位置。应保证,导向轮3转至旁边后,导向轮3不与车轮2干涉。
如图1和图2所示,车架1上还设有若干个支撑腿5,比如在车架的前端和后端各设一个支撑腿5,支撑腿5能够锚定于轨道。车架1上还设有支撑腿滑道103,支撑腿5可在支撑腿滑道103上滑动,支撑腿滑道103沿车架1宽度方向延伸或者相对车架1的长度方向倾斜设置。该作业小车在斗轮机的牵引下到达作业位置后,在支撑腿滑道103上滑动支撑腿5,支撑腿5靠近轨道并将支撑腿5锚定于轨道上,实现该作业小车位置的固定。支撑腿5为伸缩杆结构,支撑腿5能够顶起车架1,比如通过伸展前侧的支撑腿5以顶起车架1的前部,便可通过摆动前侧的导向支架32使前侧的导轮31与轨道配合或远离轨道。
当然,支撑腿5可以描固于地面,比如支撑腿5为现有技术中摩托车脚撑的结构,支撑腿5与车架1铰接,支撑腿5支撑在地面上,实现该作业小车位置的固定。
在另一优选的实施方式中,该作业小车与动力设备(比如斗轮机)限位缓冲胶块相对应的位置,增设防撞电气和机械保护装置(简称电器保护装置),电器保护装置将信号传输至动力设备,以保护该作业小车和动力设备不受到损坏。动力设备作业过程中,在动力设备与无该作业小车碰撞发生之前,设置的电器保护装置应提前动作,并将信号传输至动力设备迫使动力设备立即停止运行。
该作业小车还可在合适位置装设明显的具备警示功能的灯具,便于动力设备操作人员和现场工作人员观察该作业小车的位置。
实施例二
本实施例提供了一种无动力跨轨抑尘小车,包括承载车体和设在承载车体上的射雾器,承载车体为实施例一中的无动力跨轨作业小车,射雾器随承载车体在斗轮机的轨道上运动。
射雾器的有效射程不低于斗轮机作业最大范围的1.2倍,用于煤场卸煤、上煤扬尘遏制。射雾器随承载车体在斗轮机轨道上运动,射雾器达到作业位置后,断开推拉杆4与动力设备的连接并固定该抑尘小车,即可进行射雾作业,应保证抑尘小车停靠位置与斗轮机的距离不小于斗轮机悬臂的长度。在射雾器喷射行程范围内,布置电缆和不锈钢水管,每隔二十米设置防水性能良好的工业插座和快速水管接头,射雾器自身电源线和水管长度适合现场工作人员安全操作要求,保障射雾器随斗轮机堆取料移动时的电源和水源需要。
实施例三
本实施例提供了一种无动力跨轨抑尘小车的智能抑尘作业方法,无动力跨轨抑尘小车为实施例二中的全范围辐射远程抑尘小车。在一种优选实施方式中,该智能抑尘作业方法包括如下过程:
如图7-图10所示,初始时,抑尘小车(以下简称小车)位于小车存放区,使轨道动力设备移动至小车拖挂位置,将抑尘小车的推拉杆4与轨道动力设备连接,轨道动力设备拖动抑尘小车出库,此时抑尘小车通过车轮2在地面行进,导向轮3悬空。然后将导向轮3与轨道连接,轨道动力设备拖动抑尘小车使导向轮3在轨道上运行,轨道动力设备驱动抑尘小车运行至作业位置,并固定抑尘小车的位置,然后断开推拉杆4与轨道动力设备的连接。
射雾器连接水管和电缆,控制系统上电,智能选择抑尘模式,进行扬尘监控和扬尘点跟踪,实现射雾器智能抑尘。
抑尘结束后,断开射雾器与水管和电缆的连接,使轨道动力设备移动至小车拖挂位置,将小车的推拉杆4与轨道动力设备连接,解开抑尘小车位置的固定,轨道动力设备驱动抑尘小车使导轮31在轨道上运行,轨道动力设备推动抑尘小车后退入库,断开推拉杆4与轨道动力设备的连接,抑尘小车回到初始的小车存放区。
结合图1和图2所示,本实施例以导向轮3的数量为两个进行说明,两个导向轮3分别设在车架1的前端和后端。抑尘小车出库前,活动销34插入带孔支架102和转轴孔32a的同心孔内,前侧的导向轮3靠近小车的左侧,后侧的导向轮3位靠近小车的右侧。
如图7和图8所示,抑尘小车出库时,轨道动力设备拖动小车运动,使小车前侧车轮2越过限位挡柱,然后将前侧支撑腿5滑移至轨道正上方,取出前侧的活动销34,通过伸展前侧的支撑腿5将抑尘小车的前部顶起(此时支撑腿5的下端与轨道的上端抵紧),绕固定销33转动摆动前侧的导向支架32使前侧导轮31运动至轨道正上方,将活动销34插入至前侧夹耳101和转轴孔32a的同心孔内,再将前侧支撑腿5收回并滑移向支撑腿滑道103一侧的末端,抑尘小车的前部回落,使前侧的导轮31与轨道配合。轨道动力设备拖动小车继续前行,使小车后侧车轮2也越过限位挡柱,然后将后侧支撑腿5滑移至轨道正上方,取出后侧的活动销34,通过伸展后侧的支撑腿5将小车的后部顶起,绕固定销33转动后侧的导向支架32使后侧导轮31运动至轨道正上方,将活动销34插入至后侧夹耳101和转轴孔32a的同心孔内,再将后侧支撑腿5收回并滑移向支撑腿滑道103一侧的末端,抑尘小车的后部回落,使后侧的导轮31与轨道配合。
如图8和图9所示,射雾器进行抑尘工作之前,将前后支撑腿5滑移至轨道正上方,伸展前后支撑腿5将小车锚定与轨道或地面,以固定抑尘小车的位置。抑尘工作结束后,将前后支撑腿5收回,将前后支撑腿5滑移向各自支撑腿滑道103一侧的末端,以解开抑尘小车位置的固定。
抑尘小车入库为按原路后退至抑尘小车存放区,抑尘小车入库的过程与抑尘小车出库的过程相反。具体地,如图10所示,抑尘小车出库时,轨道动力设备推动小车运动,使小车后侧车轮2先越过限位挡柱,然后将后侧支撑腿5滑移至轨道正上方,取出后侧的活动销34,通过伸展后侧的支撑腿5将抑尘小车的后部顶起,绕固定销33转动后侧的导向支架32使导轮31远离轨道并向后侧带孔支架102靠近,将活动销34插入至后侧带孔支架102和转轴孔32a的同心孔内,再将后侧支撑腿5收回并滑移向支撑腿滑道103一侧的末端,使抑尘小车的后部回落。轨道动力设备推动小车继续后退,使小车前侧车轮2也越过限位挡柱,然后将前侧支撑腿5滑移至轨道正上方,取出前侧的活动销34,通过伸展前侧的支撑腿5将抑尘小车的前部顶起,绕固定销33转动前侧的导向支架32使导轮31远离轨道并向前侧带孔支架102靠近,将活动销34插入至前侧带孔支架102和转轴孔32a的同心孔内,再将前侧支撑腿5收回并滑移向支撑腿滑道103一侧的末端,使抑尘小车的前部回落,轨道动力设备推动小车后退结束入库。
如图9所示,射雾器具有手控抑尘模式和智控抑尘模式。
在采用手控抑尘模式时:通过控制面板上的上下左右键将抑尘喷口调整至扬尘点附近(具体可通过人工操作实现,也可通过遥控操作实现),然后启动抑尘;再通过上下左右键调整抑尘喷口位置至抑尘状态(抑尘状态是指通过目测射雾器喷出的抑尘小颗粒与粉尘可以较好的结合并抑制其向外扩散的状态),期间,当扬尘点移动时, 通过上下左右键跟随扬尘点调整抑尘喷口的位置。扬尘点停止工作时,通过停止键结束抑尘;工作结束, 通过上下左右键调整风筒收回至可移动状态。
在采用智控抑尘模式时:先通过上下左右键将抑尘喷口调整至扬尘点附近,然后启动视频追踪,同时进行扬尘监控和扬尘点跟踪。在扬尘点跟踪过程中,采集扬尘点图像,根据扬尘点图像获取灰尘集中区(例如对图像进行灰度处理,灰度值超过阈值的区域即为灰尘集中区),移动抑尘喷口与扬尘点的相对偏差,并自动调整缩小偏差,使抑尘喷口对准灰尘集中区,或者使抑尘喷口在灰尘集中区和灰尘喷射口之间扫射喷洒。具体喷洒时,根据喷出喷雾的风速风向换算抑尘喷口与扬尘点的偏移值(具体可以为根据采集到的风力和风向、及其对水雾喷出后造成的偏离量的经验值,然后驱使抑尘喷口向相反方向调整对应的角度),并自动调整缩小偏差。抑尘结束后,切换为手控模式,由人工关闭电源。
在本实施方式中,射雾器预留有偏移修正系数设置接口,由此在对射雾器设备调试时,可以通过设置偏移修正系数来实现抑尘喷口的偏移。
在本说明书的描述中,参考术语“优选的实施方式”、“一个实施例”、“一些实施例”、“示例”、“具体示例”或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
Claims (10)
1.一种无动力跨轨抑尘小车的智能抑尘作业方法,其特征在于,所述抑尘小车包括承载车体和设在承载车体上的射雾器,所述承载车体包括车架,所述车架底部安装有可沿轨道行驶的导向轮,车架上安装有车轮,车架上还连接有推拉杆,推拉杆远离车架的一端能够与轨道动力设备连接;
所述智能抑尘作业方法包括如下过程:
初始时,抑尘小车位于小车存放区,使轨道动力设备移动至小车拖挂位置,将抑尘小车的推拉杆与轨道动力设备连接,轨道动力设备拖动抑尘小车出库,此时抑尘小车通过车轮在地面行进,导向轮悬空;将导向轮与轨道连接,轨道动力设备拖动抑尘小车使导向轮在轨道上运行,轨道动力设备驱动抑尘小车运行至作业位置,并固定抑尘小车的位置,断开推拉杆与轨道动力设备的连接;
射雾器连接水管和电缆,控制系统上电,智能选择抑尘模式,进行扬尘监控和扬尘点跟踪,实现射雾器智能抑尘;
抑尘结束后,断开射雾器与水管和电缆的连接,使轨道动力设备移动至小车拖挂位置,将抑尘小车的推拉杆与轨道动力设备连接,解开抑尘小车位置的固定,轨道动力设备驱动抑尘小车使导轮在轨道上运行,轨道动力设备推动抑尘小车后退入库,断开推拉杆与轨道动力设备的连接,抑尘小车回到初始的小车存放区。
2.根据权利要求1所述的一种无动力跨轨抑尘小车的智能抑尘作业方法,其特征在于,所述导向轮包括与车架连接的导向支架、以及能够在轨道上运行的且可转动安装在导向支架上的导轮,所述导向支架上部的两端均设置有转轴孔,车架上设有与转轴孔对应的夹耳,所述导向支架通过转轴孔与所述夹耳活动连接;
抑尘小车出库时,顶起抑尘小车,通过摆动导向支架使导轮运动至轨道正上方,再使抑尘小车回落,导轮与轨道配合,轨道动力设备驱动导轮在轨道上运行;
抑尘小车入库时,顶起抑尘小车,通过摆动导向支架使导轮远离轨道,再使抑尘小车回落,轨道动力设备推动抑尘小车后退入库。
3.根据权利要求2所述的一种无动力跨轨抑尘小车的智能抑尘作业方法,其特征在于,所述导向轮的数量为两个,两个导向轮分别设在车架的前端和后端;
抑尘小车出库时,顶起抑尘小车的前部,通过摆动前侧的导向支架使前侧导轮运动至轨道正上方,再使抑尘小车的前部回落,前侧的导轮与轨道配合;顶起抑尘小车的后部,通过摆动后侧的导向支架使后侧导轮运动至轨道正上方,再使抑尘小车的后部回落,后侧的导轮与轨道配合;
抑尘小车入库时,顶起抑尘小车的后部,通过摆动后侧的导向支架使后侧导轮远离轨道,再使抑尘小车的后部回落;顶起抑尘小车的前部,通过摆动前侧的导向支架使前侧导轮远离轨道,再使抑尘小车的前部回落。
4.根据权利要求2所述的一种无动力跨轨抑尘小车的智能抑尘作业方法,其特征在于,所述导向支架的转轴孔与夹耳通过销活动连接,且其中一个销为固定销,另一个销为便于取出的活动销;
抑尘小车出库时,绕固定销转动导向支架使导轮运动至轨道正上方,将活动销插入至夹耳和转轴孔的同心孔内,实现导向轮与车架的固定,再使抑尘小车回落;
抑尘小车入库时,取出活动销,绕固定销转动导向支架使导轮远离轨道,再使抑尘小车回落。
5.根据权利要求4所述的一种无动力跨轨抑尘小车的智能抑尘作业方法,其特征在于,所述车架上还固接有能够与所述活动销插接配合的带孔支架,带孔支架的孔中心至固定销中心的距离与两个转轴孔之间的中心距相等;
抑尘小车出库前,所述活动销插入带孔支架和转轴孔的同心孔内;
抑尘小车出库时,取出活动销,绕固定销转动导向支架使导轮运动至轨道正上方后,再将活动销插入夹耳和转轴孔的同心孔内;
抑尘小车入库时,取出活动销,绕固定销转动导向支架使导轮远离轨道,再将活动销插入带孔支架和转轴孔的同心孔内。
6.根据权利要求2-5中任一项所述的一种无动力跨轨抑尘小车的智能抑尘作业方法,其特征在于,所述车架上还设有若干个支撑腿,所述支撑腿能够顶起所述车架,所述支撑腿能够锚定于轨道或地面;
抑尘小车出库时,通过伸展所述支撑腿以顶起所述车架,导轮与轨道配合后,支撑腿收回;
射雾器进行抑尘工作时,支撑腿锚定于轨道或地面,以固定所述抑尘小车的位置;
抑尘工作结束后,支撑腿收回,解开抑尘小车位置的固定;
抑尘小车入库时,通过伸展所述支撑腿以顶起所述车架,导轮与远离轨道后,支撑腿收回。
7.根据权利要求6所述的一种无动力跨轨抑尘小车的智能抑尘作业方法,其特征在于,所述车架上还设有沿车架宽度方向延伸的支撑腿滑道,所述支撑腿可在支撑腿滑道上滑动;
顶起所述车架时,支撑腿在支撑腿滑道上滑行至轨道的正上方,伸展支撑腿后,支撑腿的下端与轨道抵紧;
收回支撑腿后,支撑腿在支撑腿滑道上滑行至轨道的外侧。
8.根据权利要求1-5中任一项所述的一种无动力跨轨抑尘小车的智能抑尘作业方法,其特征在于,所述射雾器具有手控抑尘模式和智控抑尘模式。
9.根据权利要求8所述的一种无动力跨轨抑尘小车的智能抑尘作业方法,其特征在于,在采用手控抑尘模式时;
将抑尘喷口调整至扬尘点附近,启动抑尘;
调整至抑尘状态;
当扬尘点移动时, 跟随扬尘点调整抑尘喷口;
工作结束,调整风筒收回至可移动状态。
10.根据权利要求8所述的一种无动力跨轨抑尘小车的智能抑尘作业方法,其特征在于,在采用智控抑尘模式时;
将抑尘喷口调整至扬尘点附近;
启动视频追踪,同时进行扬尘监控和扬尘点跟踪;
在扬尘点跟踪过程中,采集扬尘点图像,根据扬尘点图像移动抑尘喷口与扬尘点的相对偏差,并自动调整缩小偏差,根据喷出喷雾的风速风向换算抑尘喷口与扬尘点的偏移值,并自动调整缩小偏差。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111089833.6A CN113682850B (zh) | 2021-09-17 | 2021-09-17 | 一种无动力跨轨抑尘小车的智能抑尘作业方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111089833.6A CN113682850B (zh) | 2021-09-17 | 2021-09-17 | 一种无动力跨轨抑尘小车的智能抑尘作业方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113682850A true CN113682850A (zh) | 2021-11-23 |
| CN113682850B CN113682850B (zh) | 2022-11-18 |
Family
ID=78586578
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111089833.6A Active CN113682850B (zh) | 2021-09-17 | 2021-09-17 | 一种无动力跨轨抑尘小车的智能抑尘作业方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113682850B (zh) |
Citations (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN2748156Y (zh) * | 2004-10-28 | 2005-12-28 | 天津港第二港埠有限公司 | 一种拖挂移动式抑尘喷淋设备 |
| KR100812570B1 (ko) * | 2007-09-05 | 2008-03-12 | (주)서동 | 터널의 발파 공사시 적용되는 비산 먼지 제거용 살수 장치 |
| DE102009008596A1 (de) * | 2009-02-12 | 2010-08-19 | Cft Gmbh Compact Filter Technic | Verfahren zur Sanierung und/oder Erweiterung von befahrbaren Tunnelröhren |
| CN102407057A (zh) * | 2011-11-14 | 2012-04-11 | 广东风华环保设备有限公司 | 轨道自行式环保喷雾除尘装置 |
| CN103256071A (zh) * | 2013-05-24 | 2013-08-21 | 济南隆恒矿山机械有限公司 | 一种煤矿巷道无动力洒水车 |
| CN103801167A (zh) * | 2014-02-25 | 2014-05-21 | 苏州中材建设有限公司 | 喷雾除尘多自由度调整移动臂架 |
| CN204865372U (zh) * | 2015-07-09 | 2015-12-16 | 山东华力机电有限公司 | 移动式喷雾机 |
| CN206081992U (zh) * | 2016-06-14 | 2017-04-12 | 张家口恒灏环保科技有限公司 | 拖挂式多功能射雾器 |
| CN207278294U (zh) * | 2017-10-24 | 2018-04-27 | 郝先鹏 | 一种用于煤矿井下用喷雾降尘装置 |
| CN109151384A (zh) * | 2018-07-22 | 2019-01-04 | 绿山高科建设科技有限公司 | 一种建筑工地的降尘监控系统及其降尘方法 |
| CN209670996U (zh) * | 2019-02-26 | 2019-11-22 | 梁俊锋 | 一种基于矿山开采的辅助抑尘喷雾装置 |
| CN209838470U (zh) * | 2019-05-04 | 2019-12-24 | 王建中 | 一种煤矿井下可移动式喷雾降尘装置 |
| CN211462468U (zh) * | 2019-12-16 | 2020-09-11 | 江西省雄发环保选矿设备制造有限公司 | 一种便于安装的矿山开采设备除尘装置 |
| CN212428814U (zh) * | 2020-06-22 | 2021-01-29 | 张鑫 | 矿山开采喷雾风机 |
| CN212837926U (zh) * | 2020-05-26 | 2021-03-30 | 秦会锦 | 一种煤矿掘进作业用高效喷雾装置 |
| CN112675641A (zh) * | 2020-10-29 | 2021-04-20 | 河南省工建集团有限责任公司 | 一种除尘喷淋系统及安装方法 |
| CN112959861A (zh) * | 2021-02-05 | 2021-06-15 | 卢红绸 | 一种铁路钢轨运输车连接过渡调节装置 |
-
2021
- 2021-09-17 CN CN202111089833.6A patent/CN113682850B/zh active Active
Patent Citations (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN2748156Y (zh) * | 2004-10-28 | 2005-12-28 | 天津港第二港埠有限公司 | 一种拖挂移动式抑尘喷淋设备 |
| KR100812570B1 (ko) * | 2007-09-05 | 2008-03-12 | (주)서동 | 터널의 발파 공사시 적용되는 비산 먼지 제거용 살수 장치 |
| DE102009008596A1 (de) * | 2009-02-12 | 2010-08-19 | Cft Gmbh Compact Filter Technic | Verfahren zur Sanierung und/oder Erweiterung von befahrbaren Tunnelröhren |
| CN102407057A (zh) * | 2011-11-14 | 2012-04-11 | 广东风华环保设备有限公司 | 轨道自行式环保喷雾除尘装置 |
| CN103256071A (zh) * | 2013-05-24 | 2013-08-21 | 济南隆恒矿山机械有限公司 | 一种煤矿巷道无动力洒水车 |
| CN103801167A (zh) * | 2014-02-25 | 2014-05-21 | 苏州中材建设有限公司 | 喷雾除尘多自由度调整移动臂架 |
| CN204865372U (zh) * | 2015-07-09 | 2015-12-16 | 山东华力机电有限公司 | 移动式喷雾机 |
| CN206081992U (zh) * | 2016-06-14 | 2017-04-12 | 张家口恒灏环保科技有限公司 | 拖挂式多功能射雾器 |
| CN207278294U (zh) * | 2017-10-24 | 2018-04-27 | 郝先鹏 | 一种用于煤矿井下用喷雾降尘装置 |
| CN109151384A (zh) * | 2018-07-22 | 2019-01-04 | 绿山高科建设科技有限公司 | 一种建筑工地的降尘监控系统及其降尘方法 |
| CN209670996U (zh) * | 2019-02-26 | 2019-11-22 | 梁俊锋 | 一种基于矿山开采的辅助抑尘喷雾装置 |
| CN209838470U (zh) * | 2019-05-04 | 2019-12-24 | 王建中 | 一种煤矿井下可移动式喷雾降尘装置 |
| CN211462468U (zh) * | 2019-12-16 | 2020-09-11 | 江西省雄发环保选矿设备制造有限公司 | 一种便于安装的矿山开采设备除尘装置 |
| CN212837926U (zh) * | 2020-05-26 | 2021-03-30 | 秦会锦 | 一种煤矿掘进作业用高效喷雾装置 |
| CN212428814U (zh) * | 2020-06-22 | 2021-01-29 | 张鑫 | 矿山开采喷雾风机 |
| CN112675641A (zh) * | 2020-10-29 | 2021-04-20 | 河南省工建集团有限责任公司 | 一种除尘喷淋系统及安装方法 |
| CN112959861A (zh) * | 2021-02-05 | 2021-06-15 | 卢红绸 | 一种铁路钢轨运输车连接过渡调节装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113682850B (zh) | 2022-11-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7350467B2 (en) | Long rail pick-up and delivery system | |
| RU2062313C1 (ru) | Машина для ремонта или укладки железнодорожного пути | |
| CN101993005B (zh) | 用于轮胎式龙门起重机的自动取电系统及自动取电方法 | |
| CN108419652B (zh) | 一种底盘旋转式水涡轮驱动卷盘喷灌机的使用方法 | |
| CN111762131B (zh) | 一种空车线智能清车厢系统及其清扫方法 | |
| CN211896701U (zh) | 一种隧道衬砌台架 | |
| CN105133515B (zh) | 声屏障巡检维修设备 | |
| CN113200308A (zh) | 一种具有托举功能的动车组车下部件拆装设备 | |
| CN113682850B (zh) | 一种无动力跨轨抑尘小车的智能抑尘作业方法 | |
| CN216008528U (zh) | 一种走行小车及含此走行小车的养护台车 | |
| CN115198582A (zh) | 一种轨枕螺栓涂油装置及包括该装置的铁路工程作业车 | |
| CN205046491U (zh) | 声屏障巡检维修设备 | |
| CA2912866C (en) | Railway vehicle | |
| CN216036936U (zh) | 一种无动力跨轨作业小车和全范围辐射远程射雾器 | |
| CN216687184U (zh) | 一种门式起重机的限位控制装置 | |
| CN215748970U (zh) | 一种动车底仓设备拆装装置 | |
| CN215513943U (zh) | 一种便于对接安装的平板拖车 | |
| CN115352540A (zh) | 一种具有横向定位功能的二轴轴转向空悬挂车安装面板 | |
| CN205010159U (zh) | 升降式侧防护 | |
| CN209778206U (zh) | 一种用于承载涂料的叉车 | |
| CN220012057U (zh) | 作业臂和作业车 | |
| CN220578777U (zh) | 一种具有防护结构的门式起重机 | |
| CN213537024U (zh) | 一种行车限位器 | |
| CN210396610U (zh) | 一种地铁隧道新式侧壁作业梯车 | |
| CN205345356U (zh) | 一种滑橇式直升机拖车 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |