CN112775927A - 一种仓储搬运机器人 - Google Patents
一种仓储搬运机器人 Download PDFInfo
- Publication number
- CN112775927A CN112775927A CN202110018409.6A CN202110018409A CN112775927A CN 112775927 A CN112775927 A CN 112775927A CN 202110018409 A CN202110018409 A CN 202110018409A CN 112775927 A CN112775927 A CN 112775927A
- Authority
- CN
- China
- Prior art keywords
- motor
- bearing seat
- cleaning
- turntable
- transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
- B25J15/0608—Gripping heads and other end effectors with vacuum or magnetic holding means with magnetic holding means
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01H—STREET CLEANING; CLEANING OF PERMANENT WAYS; CLEANING BEACHES; DISPERSING OR PREVENTING FOG IN GENERAL CLEANING STREET OR RAILWAY FURNITURE OR TUNNEL WALLS
- E01H1/00—Removing undesirable matter from roads or like surfaces, with or without moistening of the surface
- E01H1/08—Pneumatically dislodging or taking-up undesirable matter or small objects; Drying by heat only or by streams of gas; Cleaning by projecting abrasive particles
Abstract
本发明公开了一种仓储搬运机器人,包括承载组件、清扫组件、搬运组件和吸尘器,承载组件包括承载座和四个滚轮,清扫组件包括第一电机、第一锥齿轮、传动件和清扫件,搬运组件包括支撑柱、第二电机、传动轴、转盘、支撑杆和搬货件。本发明中,其承载座和四个滚轮简便的实现机器人的移动,进而实现对货物进行运送,达到良好的移动效果,其清扫件转动将邻近垃圾清扫到承载座底部中心处,在通过吸尘器将垃圾收集,简便的实现对垃圾的清理,避免后期人工清扫,省时省力,当待搬运货物与目的地较接近时,不需要移动承载座,通过第二电机带动转盘旋转,转盘带动支撑杆旋转,进而带动搬货件旋转,进而将待搬运货物搬运到目的地。
Description
技术领域
本发明涉及工业机器人技术领域,特别涉及一种仓储搬运机器人。
背景技术
机器人可以运行预先编排的程序,按照人类的指挥执行任务,随着科技的不断创新与进步,机器人系统在各个领域的应用越来越广泛,目前,工业机器人的应用领域主要有弧焊、点焊、装配、搬用、喷漆、检测、研磨抛光、激光加工等,其中搬运机器人在搬运工作上应用广泛,搬运机器人都是先移动到待搬货物旁边,通过夹持部对货物进行固定,之后再移动到所需位置将货物放下。
但是,现在的工业机器人在对货物进行搬运时,尤其是在搬运存放时间较长的货物时,货物搬走之后,底部会残留垃圾,这些垃圾需要人工扫除,费事费力。
发明内容
(一)要解决的技术问题
本发明可以解决现有的设备在将存放时间较长的货物搬走之后,底部会残留垃圾,这些垃圾需要人工扫除,费事费力的难题。
(二)技术方案
为了实现上述目的,本发明采用以下技术方案,一种仓储搬运机器人,包括承载组件、清扫组件、搬运组件和吸尘器。
所述承载组件包括承载座和四个滚轮,所述承载座呈空心设置,四个所述滚轮均对称安装于所述承载座底部邻近棱边处;
所述清扫组件包括第一电机、第一锥齿轮、传动件和清扫件,所述传动件和所述清扫件设有两个,所述第一电机安装于所述承载座顶部,所述第一锥齿轮键连接于所述第一电机输出端,所述传动件转动安装于所述承载座顶部,所述传动件一端与所述第一锥齿轮传动连接,所述清扫件转动安装于所述承载座侧壁,所述清扫件一端键连接有第二锥齿轮,所述第二锥齿轮与所述传动件传动连接;
所述搬运组件包括支撑柱、第二电机、传动轴、转盘、支撑杆和搬货件,所述支撑柱垂直安装于所述承载座顶部,所述支撑柱呈空心设置,所述第二电机安装于所述承载座内壁,所述传动轴转动安装于所述支撑柱内壁,所述第二电机与所述传动轴传动连接,所述转盘转动安装与所述支撑柱顶部,所述传动轴另一端与所述转盘连接,所述支撑杆一端安装于所述转盘侧壁,所述搬货件安装于所述支撑杆另一端;
所述吸尘器安装于所述承载座内部,所述吸尘器吸尘端与两个所述清扫件呈相对设置。
作为本发明的一种优选技术方案,所述承载座侧壁铰接有检修门,所述承载座顶部安装有支撑板,所述传动件转动安装于所述支撑板侧壁,所述承载座相对侧壁均开设有与所述清扫件配合的贯穿孔。
作为本发明的一种优选技术方案,所述传动件包括传动轴和两个第三锥齿轮,所述传动轴通过所述支撑板转动安装于所述承载座,两个所述第三锥齿轮均键连接于所述传动轴两端,两个所述第三锥齿轮分别与所述第一锥齿轮和所述第二锥齿轮相啮合。
作为本发明的一种优选技术方案,所述清扫件包括连接柱和圆盘,所述连接柱转动安装于所述贯穿孔,所述连接柱一端与所述第二锥齿轮连接,所述圆盘套接安装于所述连接柱另一端,所述圆盘底部安装有若干刷毛,若干所述刷毛与所述圆盘底部的夹角均设置为30°。
作为本发明的一种优选技术方案,所述圆盘顶部安装有套筒,所述套筒套接安装于所述连接柱,所述套筒侧壁螺纹安装有螺栓,所述螺栓一端与所述连接柱相抵触。
作为本发明的一种优选技术方案,所述转盘底部邻近外周处设置有凸起部,所述凸起部与所述转盘为一体结构。
作为本发明的一种优选技术方案,所述凸起部侧壁安装有若干滚珠,若干所述滚珠与所述支撑柱侧壁相贴合。
作为本发明的一种优选技术方案,所述支撑杆远离转盘的一端开设有贯穿槽。
作为本发明的一种优选技术方案,所述搬货件包括第三电机、收卷辊、电磁吸盘,所述第三电机安装于所述支撑杆侧壁,所述收卷辊转动安装于所述支撑杆邻近所述贯穿槽侧壁,所述收卷辊与所述第三电机传动连接,所述电磁吸盘通过钢绳与所述收卷辊连接。
作为本发明的一种优选技术方案,所述收卷辊包括转动辊和两个限位块,所述转动辊与所述第三电机输出端传动连接,所述钢绳一端安装于所述转动辊侧壁,两个所述限位块均分别安装于所述转动辊两端。
(三)有益效果
1.本发明提供的仓储搬运机器人,其承载座和四个滚轮简便的实现机器人的移动,进而实现对货物进行运送,达到良好的移动效果;
2.本发明提供的仓储搬运机器人,其清扫件转动将邻近垃圾清扫到承载座底部中心处,在通过吸尘器将垃圾收集,简便的实现对垃圾的清理,避免后期人工清扫,省时省力;
3.本发明提供的仓储搬运机器人,当待搬运货物与目的地较接近时,不需要移动承载座,通过第二电机带动转盘旋转,转盘带动支撑杆旋转,进而带动搬货件旋转,进而将待搬运货物搬运到目的地。
附图说明
为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
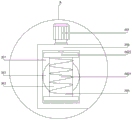
图1是本发明的主视剖面示意图;
图2是本发明的图1中A处俯视放大示意图;
图3是本发明的图1中B放大示意图;
图4是本发明的图1中C-C处剖面示意图;
图5是本发明的图4中D处放大示意图;
图6是本发明的图1中E处放大示意图。
图中:100、承载组件;110、承载座;111、检修门;112、支撑板;113、贯穿孔;120、滚轮;200、清扫组件;210、第一电机;220、第一锥齿轮;230、传动件;231、传动轴;232、第三锥齿轮;240、清扫件;241、连接柱;242、圆盘;2421、刷毛;2422、套筒;24221、螺栓;250、第二锥齿轮;300、搬运组件;310、支撑柱;320、第二电机;330、转动轴;340、转盘;341、凸起部;3411、滚珠;350、支撑杆;351、贯穿槽;360、搬货件;361、第三电机;362、收卷辊;3621、转动辊;3622、限位块;363、电磁吸盘;364、钢绳;400、吸尘器。
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
在本发明的描述中,需要理解的是,术语“纵向”、“上”、“下”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
如图1-6所示,一种仓储搬运机器人,包括承载组件100、清扫组件200、搬运组件300和吸尘器400,清扫组件200安装于承载组件100侧壁,搬运组件300安装于承载组件100顶部,吸尘器400安装于承载组件100顶部,清扫组件200用于对地面上的垃圾进行打扫汇集,搬运组件300用于对待搬运货物进行搬运,吸尘器400用于将清扫组件200打扫汇集的垃圾进行收集,便于后续的清理。
请参阅图1、图3、图4和图5,承载组件100包括承载座110和四个滚轮120,承载座110呈空心设置,便于吸尘器400的安装,具体设置时,四个滚轮120均为电动轮,四个滚轮120均对称使用螺钉安装于承载座110底部邻近棱边处,具体设置时,滚轮120用于对承载座110进行移动,进而使承载座110移动。
在本实施例中,承载座110侧壁铰接有检修门111,检修门111用于对吸尘器400进行清理。
在本实施例中,承载座110顶部安装有支撑板112,支撑板112与承载座110为一体结构,支撑板112便于清扫组件200的安装,承载座110相对侧壁均开设有贯穿孔113,贯穿孔113便于清扫组件200的安装。
请参阅图1、图3、图4和图5,清扫组件200包括第一电机210、第一锥齿轮220、传动件230和清扫件240,传动件230和清扫件240均设有两个,第一电机210使用螺钉安装于承载座110顶部,第一锥齿轮220键连接于第一电机210输出端,传动件230转动安装于承载座110顶部,传动件230用于将第一电机210的动力传输给清扫件240,具体设置时,传动件230转动安装于支撑板112顶部,传动件230一端与第一锥齿轮220传动连接,清扫件240转动安装于承载座110侧壁,具体实施时,清扫件240通过贯穿孔113转动安装于承载座110侧壁,清扫件240用于对地面的垃圾进行打扫,清扫件240一端键连接有第二锥齿轮250,第二锥齿轮250与传动件230传动连接,具体设置时,第一电机210运转带动第一锥齿轮220转动,第一锥齿轮220带动传动件230转动,传动件230带动第二锥齿轮250转动,进而带动清扫件240转动。
在本实施例中,传动件230包括传动轴231和两个第三锥齿轮232,传动轴231通过支撑板112转动安装于承载座110,两个第三锥齿轮232均键连接于传动轴231两端,两个第三锥齿轮232分别与第一锥齿轮220和第二锥齿轮250相啮合,具体设置时,第一电机210运转带动第一锥齿轮220转动,通过第一锥齿轮220与第三锥齿轮232相啮合带动传动轴231转动,进而通过第二锥齿轮250与第三锥齿轮232相啮合带动清扫件240转动。
在本实施例中,清扫件240包括连接柱241和圆盘242,连接柱241通过贯穿孔113转动安装于承载座110侧壁,连接柱241一端与第二锥齿轮250键连接,圆盘242套接安装于连接柱241另一端,圆盘242底部安装有若干刷毛2421,若干刷毛2421与圆盘242底部的夹角均设置为30°,具体设置时,若干刷毛2421用于对地面进行清扫,呈30°设置可确保将垃圾清扫到承载座110顶部,进而便于吸尘器400将垃圾清理,具体设置时,圆盘242顶部安装有套筒2422,套筒2422套接安装于连接柱241,套筒2422侧壁螺纹安装有螺栓24221,螺栓24221一端与连接柱241相抵触,当不需要对地面清扫时,将套筒2422向上滑动,再通过螺栓24221对套筒2422进行固定,有效避免当不需要使用时刷毛2421一直与地面摩擦,造成刷毛2421的损坏。
请参阅图1、图2和图6,搬运组件300包括支撑柱310、第二电机320、转动轴330、转盘340、支撑杆350和搬货件360,支撑柱310垂直使用螺钉安装于承载座110顶部,支撑柱310呈空心设置,便于转动轴330的安装,第二电机320使用螺钉安装于承载座110内壁,转动轴330转动安装于支撑柱310内壁,第二电机320与转动轴330一端传动连接,转盘340转动安装与支撑柱310顶部,转动轴330另一端与转盘340键连接,支撑杆350一端使用螺钉安装于转盘340侧壁,搬货件360安装于支撑杆另一端,具体设置时,当待搬运货物与目的地较接近时,不需要移动承载座110,第二电机320转动带动转动轴330转动,转动轴330带动转盘340转动,进而带动搬货件360转动,可快速将待搬运货物搬运到目的地。
在本实施例中,转盘340底部邻近外周处设置有凸起部341,凸起部341与转盘340为一体结构,凸起部341用于对转盘340进行限位,防止货物过重时转盘340发生偏移的情况发生,凸起部341侧壁安装有若干滚珠3411,若干滚珠3411与支撑柱310侧壁相贴合,具体设置时,若干滚珠3411用于减小凸起部341与支撑柱310侧壁之间的接触面积,进而减小摩擦力,便于转盘340转动。
在本实施例中,支撑杆350远离转盘340的一端开设有贯穿槽351,贯穿槽351便于搬货件360的安装。
在本实施例中,搬货件360包括第三电机361、收卷辊362、电磁吸盘363,第三电机361使用螺钉安装于支撑杆350侧壁,收卷辊362转动安装于支撑杆350邻近贯穿槽351侧壁,收卷辊362与第三电机361传动连接,电磁吸盘363通过钢绳364与收卷辊362连接,具体使用时,通过电磁吸盘363将货物吸起,此时第三电机361运转带动收卷辊362转动,进而使收卷辊362对钢绳364进行收卷,进而将货物抬高,有效避免直接将货物横移对货物底部造成损坏,具体设置时,收卷辊362包括转动辊3621和两个限位块3622,转动辊3621转动安装于支撑杆350邻近贯穿槽351侧壁,转动辊3621与第三电机361输出端传动连接,钢绳364一端安装于转动辊3621侧壁,两个限位块3622均分别安装于转动辊3621两端,具体设置时,转动辊3621用于对钢绳364进行收卷或放开,两个限位块3622用于对钢绳364进行限位,有效避免钢绳364收卷时脱离转动辊3621发安全事故的情况发生。
请参阅图1,吸尘器400安装于承载座110内部,吸尘器400吸尘端与两个清扫件240呈相对设置,可有效的将清扫件240清扫的垃圾全部清理,具体设置时,吸尘器400用于将地面残留的垃圾进行收集,便于后续的清理。
具体地,该仓储搬运机器人的工作原理:使用时首先通过滚轮120使承载座110移动到便于作业的位置,再通过电磁吸盘363将货物抬起,通过第二电机320转动带动转动轴330转动,转动轴330带动转盘340转动,进而带动搬货件360转动,可快速将待搬运货物搬运到目的地,当地面存有垃圾时,第一电机210运转带动第一锥齿轮220转动,第一锥齿轮220带动传动件230转动,传动件230带动第二锥齿轮250转动,进而带动连接柱241转动,连接柱241转动带动圆盘242转动,进而使圆盘242底部安装的刷毛2421旋转,对地面进行打扫清理,将垃圾打扫到承载座110底部,此时垃圾会被吸尘器400吸入,便于后续的清理,有效避免人工对地面进行清理费事费力的情况发生。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
Claims (10)
1.一种仓储搬运机器人,其特征在于,包括:
承载组件(100),所述承载组件(100)包括承载座(110)和四个滚轮(120),所述承载座(110)呈空心设置,四个所述滚轮(120)均对称安装于所述承载座(110)底部邻近棱边处;
清扫组件(200),所述清扫组件(200)包括第一电机(210)、第一锥齿轮(220)、传动件(230)和清扫件(240),所述传动件(230)和所述清扫件(240)均设有两个,所述第一电机(210)安装于所述承载座(110)顶部,所述第一锥齿轮(220)键连接于所述第一电机(210)输出端,所述传动件(230)转动安装于所述承载座(110)顶部,所述传动件(230)一端与所述第一锥齿轮(220)传动连接,所述清扫件(240)转动安装于所述承载座(110)侧壁,所述清扫件(240)一端键连接有第二锥齿轮(250),所述第二锥齿轮(250)与所述传动件(230)传动连接;
搬运组件(300),所述搬运组件(300)包括支撑柱(310)、第二电机(320)、转动轴(330)、转盘(340)、支撑杆(350)和搬货件(360),所述支撑柱(310)垂直安装于所述承载座(110)顶部,所述支撑柱(310)呈空心设置,所述第二电机(320)安装于所述承载座(110)内壁,所述转动轴(330)转动安装于所述支撑柱(310)内壁,所述第二电机(320)与所述转动轴(330)传动连接,所述转盘(340)转动安装与所述支撑柱(310)顶部,所述转动轴(330)另一端与所述转盘(340)连接,所述支撑杆(350)一端安装于所述转盘(340)侧壁,所述搬货件(360)安装于所述支撑杆另一端;
吸尘器(400),所述吸尘器(400)安装于所述承载座(110)内部,所述吸尘器(400)吸尘端与两个所述清扫件(240)呈相对设置。
2.根据权利要求1所述的一种仓储搬运机器人,其特征在于,所述承载座(110)侧壁铰接有检修门(111),所述承载座(110)顶部安装有支撑板(112),所述传动件(230)转动安装于所述支撑板(112)侧壁,所述承载座(110)相对侧壁均开设有与所述清扫件(240)配合的贯穿孔(113)。
3.根据权利要求1所述的一种仓储搬运机器人,其特征在于,所述传动件(230)包括传动轴(231)和两个第三锥齿轮(232),所述传动轴(231)通过所述支撑板(112)转动安装于所述承载座(110),两个所述第三锥齿轮(232)均键连接于所述传动轴(231)两端,两个所述第三锥齿轮(232)分别与所述第一锥齿轮(220)和所述第二锥齿轮(250)相啮合。
4.根据权利要求2所述的一种仓储搬运机器人,其特征在于,所述清扫件(240)包括连接柱(241)和圆盘(242),所述连接柱(241)一端与所述第二锥齿轮(250)连接,所述连接柱(241)通过所述贯穿孔(113)转动安装于所述承载座(110)侧壁,所述圆盘(242)套接安装于所述连接柱(241)另一端,所述圆盘(242)底部安装有若干刷毛(2421),若干所述刷毛(2421)与所述圆盘(242)底部的夹角均设置为30°。
5.根据权利要求4所述的一种仓储搬运机器人,其特征在于,所述圆盘(242)顶部安装有套筒(2422),所述套筒(2422)套接安装于所述连接柱(241),所述套筒(2422)侧壁螺纹安装有螺栓(24221),所述螺栓(24221)一端与所述连接柱(241)相抵触。
6.根据权利要求4所述的一种仓储搬运机器人,其特征在于,所述转盘(340)底部邻近外周处设置有凸起部(341),所述凸起部(341)与所述转盘(340)为一体结构。
7.根据权利要求6所述的一种仓储搬运机器人,其特征在于,所述凸起部(341)侧壁安装有若干滚珠(3411),若干所述滚珠(3411)与所述支撑柱(310)侧壁相贴合。
8.根据权利要求1所述的一种仓储搬运机器人,其特征在于,所述支撑杆(350)远离转盘(340)的一端开设有贯穿槽(351)。
9.根据权利要求8所述的一种仓储搬运机器人,其特征在于,所述搬货件(360)包括第三电机(361)、收卷辊(362)、电磁吸盘(363),所述第三电机(361)安装于所述支撑杆(350)侧壁,所述收卷辊(362)转动安装于所述支撑杆(350)邻近所述贯穿槽(351)侧壁,所述收卷辊(362)与所述第三电机(361)传动连接,所述电磁吸盘(363)通过钢绳(364)与所述收卷辊(362)连接。
10.根据权利要求9所述的一种仓储搬运机器人,其特征在于,所述收卷辊(362)包括转动辊(3621)和两个限位块(3622),所述转动辊(3621)与所述第三电机(361)输出端传动连接,所述钢绳(364)一端安装于所述转动辊(3621)侧壁,两个所述限位块(3622)均分别安装于所述转动辊(3621)两端。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110018409.6A CN112775927A (zh) | 2021-01-07 | 2021-01-07 | 一种仓储搬运机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110018409.6A CN112775927A (zh) | 2021-01-07 | 2021-01-07 | 一种仓储搬运机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112775927A true CN112775927A (zh) | 2021-05-11 |
Family
ID=75756695
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110018409.6A Pending CN112775927A (zh) | 2021-01-07 | 2021-01-07 | 一种仓储搬运机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112775927A (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113954090A (zh) * | 2021-10-15 | 2022-01-21 | 许磊 | 一种仓储搬运机器人 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130055524A1 (en) * | 2011-09-07 | 2013-03-07 | Wiedenmann Gmbh | Cleaning device for cleaning artificial floor areas provided with floor covering particles, especially for artifical turf |
| CN204935662U (zh) * | 2015-09-01 | 2016-01-06 | 江苏新光数控技术有限公司 | 一种大型智能化扫地机器人 |
| CN206764781U (zh) * | 2017-04-21 | 2017-12-19 | 济南大学泉城学院 | 一种工作稳定的机器人搬运装置 |
| CN207656670U (zh) * | 2017-10-31 | 2018-07-27 | 郑州慧腾科技有限公司 | 集清扫与安防一体的巡防机器人 |
| US20180296057A1 (en) * | 2015-11-11 | 2018-10-18 | Zhengzhou Qingchenyu Cleaning Equipment Co., Ltd. | Large to medium-size sweeping and mopping vehicle and mopping vehicle |
| CN108999129A (zh) * | 2018-09-04 | 2018-12-14 | 叶波 | 一种道路清扫装置及其使用方法 |
| CN210439208U (zh) * | 2019-07-19 | 2020-05-01 | 周成艳 | 一种市政工程环保用道路垃圾清扫装置 |
| CN210968883U (zh) * | 2019-11-01 | 2020-07-10 | 成都墨轩科技有限公司 | 一种用于移动物品的吸盘机械手 |
| CN112140119A (zh) * | 2019-06-28 | 2020-12-29 | 江苏凯盛信息科技有限公司 | 一种工厂物料转运用搬运机器人 |
-
2021
- 2021-01-07 CN CN202110018409.6A patent/CN112775927A/zh active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130055524A1 (en) * | 2011-09-07 | 2013-03-07 | Wiedenmann Gmbh | Cleaning device for cleaning artificial floor areas provided with floor covering particles, especially for artifical turf |
| CN204935662U (zh) * | 2015-09-01 | 2016-01-06 | 江苏新光数控技术有限公司 | 一种大型智能化扫地机器人 |
| US20180296057A1 (en) * | 2015-11-11 | 2018-10-18 | Zhengzhou Qingchenyu Cleaning Equipment Co., Ltd. | Large to medium-size sweeping and mopping vehicle and mopping vehicle |
| CN206764781U (zh) * | 2017-04-21 | 2017-12-19 | 济南大学泉城学院 | 一种工作稳定的机器人搬运装置 |
| CN207656670U (zh) * | 2017-10-31 | 2018-07-27 | 郑州慧腾科技有限公司 | 集清扫与安防一体的巡防机器人 |
| CN108999129A (zh) * | 2018-09-04 | 2018-12-14 | 叶波 | 一种道路清扫装置及其使用方法 |
| CN112140119A (zh) * | 2019-06-28 | 2020-12-29 | 江苏凯盛信息科技有限公司 | 一种工厂物料转运用搬运机器人 |
| CN210439208U (zh) * | 2019-07-19 | 2020-05-01 | 周成艳 | 一种市政工程环保用道路垃圾清扫装置 |
| CN210968883U (zh) * | 2019-11-01 | 2020-07-10 | 成都墨轩科技有限公司 | 一种用于移动物品的吸盘机械手 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113954090A (zh) * | 2021-10-15 | 2022-01-21 | 许磊 | 一种仓储搬运机器人 |
| CN113954090B (zh) * | 2021-10-15 | 2024-03-15 | 浙江逊龙机器人科技有限公司 | 一种仓储搬运机器人 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112775927A (zh) | 一种仓储搬运机器人 | |
| CN111409994A (zh) | 一种超长货物自动存取机构 | |
| CN111391742B (zh) | 一种工业运载机器人 | |
| CN211495530U (zh) | 一种仓储自动送货机 | |
| CN218058213U (zh) | 一种电动搬运车起重机构 | |
| CN115158953B (zh) | 一种硅棒仓储出料输送装置及其输送方法 | |
| CN113753153B (zh) | 一种适用于狭小空间的搬运设备 | |
| CN214648359U (zh) | 一种设备运输装置 | |
| CN216154866U (zh) | 一种配送站用电机自动化翻面装置 | |
| CN215478309U (zh) | 上下料装置 | |
| CN213109404U (zh) | 一种倒运装置 | |
| CN210794563U (zh) | 一种便于清洁的轴式提升机 | |
| CN213569381U (zh) | 一种堆高机 | |
| CN209850604U (zh) | 一种五金筒环切割边缘打磨装置 | |
| CN204675362U (zh) | 一种柱形货物取放装置 | |
| CN213167841U (zh) | 一种建筑工程用运料装置 | |
| CN215160740U (zh) | 一种高稳定性电动叉车 | |
| CN210237028U (zh) | 一种叉车旋转装置 | |
| US11124105B2 (en) | Solid waste displacement system | |
| CN215237659U (zh) | 应用于3d打印机的工作箱运转系统 | |
| CN217808613U (zh) | 一种具有防倾倒功能的纯电动叉车 | |
| CN217778708U (zh) | 一种自动化砖块装卸搬运车 | |
| CN214162964U (zh) | 一种便于移动的汽车前地板料架 | |
| CN214166200U (zh) | 一种移动工装小车 | |
| CN214828754U (zh) | 一种建筑工程用物料提升机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20210511 |
|
| RJ01 | Rejection of invention patent application after publication |