CN112606037B - 一种同步转动的人形铸造辅助机器人腰臂连接机构 - Google Patents
一种同步转动的人形铸造辅助机器人腰臂连接机构 Download PDFInfo
- Publication number
- CN112606037B CN112606037B CN202011489762.4A CN202011489762A CN112606037B CN 112606037 B CN112606037 B CN 112606037B CN 202011489762 A CN202011489762 A CN 202011489762A CN 112606037 B CN112606037 B CN 112606037B
- Authority
- CN
- China
- Prior art keywords
- block
- gear
- rotating
- outside
- elastic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
Abstract
本发明公开了一种同步转动的人形铸造辅助机器人腰臂连接机构,包括靠背、转动轴、转动块和盖板,所述靠背的外侧连接有弹性层,且弹性层的外侧连接有连接层,并且连接层的外侧固定连接有第一连接块,所述连接层的两侧开设有固定槽,且固定槽的内部固定有竖杆,所述竖杆的外部贯穿有滑块,且滑块的底端固定连接有锯齿块,并且锯齿块的外侧安装有啮合块,所述转动轴安装于靠背的底部,且转动轴的底部固定有连接座,所述连接座的内部安装有传动齿轮,且传动齿轮的顶端固定安装有第一齿轮。该同步转动的人形铸造辅助机器人腰臂连接机构具有调节捆绑松紧度的效果,且具有辅助转动和使用者同步转动的效果,同时具有降低压迫感的效果。
Description
技术领域
本发明涉及机器人技术领域,具体为一种同步转动的人形铸造辅助机器人腰臂连接机构。
背景技术
机器人是一种模拟人类行为或外形创造出的智能机械设备,传统的机器人可以代替人工完成相应的工作,并具有一定的思维性,并可以通过大量的练习来提高机动性和智能性,还有一种外骨骼辅助机器人,这种机器人广泛的应用于康复领域,可以辅助患者身体机能的康复,现在市面上传统的辅助机器人腰臂连接机构还存在一定的不足,例如:
1、现在传统的辅助机器人腰臂连接机构在同步转动上还存在一定的不足,传统的辅助机器人腰臂连接机构不能灵活的根据人体转动并进行转动,灵活性较差,当患者需要通过腰部扭动动作进行康复时,进而出现难以满足患者需求的问题。
2、现在传统的辅助机器人腰臂连接机构在缓解患者背部压迫感还存在一定的不足,因外骨骼辅助机器人腰臂连接机构多数为金属结构,若是不能对和患者连接的部位进行缓冲,经过一段时间使用,容易对患者身体产生一定的影响,进而因压迫而出现身体酸痛等问题。
针对现有问题,急需在原有腰臂连接机构的基础上进行创新。
发明内容
本发明的目的在于提供一种同步转动的人形铸造辅助机器人腰臂连接机构,以解决上述背景技术中提出的在同步转动上还存在一定的不足,传统的辅助机器人腰臂连接机构不能灵活的根据人体转动并进行转动,灵活性较差,当患者需要通过腰部扭动动作进行康复时,进而出现难以满足患者需求,同时在缓解患者背部压迫感还存在一定的不足,因外骨骼辅助机器人腰臂连接机构多数为金属结构,若是不能对和患者连接的部位进行缓冲,经过一段时间使用,容易对患者身体产生一定的影响,进而因压迫而出现身体酸痛等问题。
为实现上述目的,本发明提供如下技术方案:一种同步转动的人形铸造辅助机器人腰臂连接机构,包括靠背、转动轴、转动块和盖板,所述靠背的外侧连接有弹性层,且弹性层的外侧连接有连接层,并且连接层的外侧固定连接有第一连接块,所述连接层的两侧开设有固定槽,且固定槽的内部固定有竖杆,所述竖杆的外部贯穿有滑块,且滑块的底端固定连接有锯齿块,并且锯齿块的外侧安装有啮合块,所述转动轴安装于靠背的底部,且转动轴的底部固定有连接座,所述连接座的内部安装有传动齿轮,且传动齿轮的顶端固定安装有第一齿轮,所述第一齿轮的外侧连接有链条,且第一齿轮的左侧安装有第二齿轮,所述转动块安装于连接座的两端,且转动块的外侧连接有连接带,所述连接带的一端连接有弹性带,且弹性带的外侧固定安装有卡扣,并且卡扣的外侧连接有限位带,所述盖板安装于连接座的外侧,且盖板的内壁连接有锁定块。
优选的,所述弹性层的外侧与连接层的内侧相互贴合,且第一连接块关于连接层的外壁层等距离设置。
优选的,所述滑块嵌套设置于竖杆的内部,且滑块通过锯齿块与固定槽构成滑动结构,并且锯齿块与啮合块之间为啮合连接。
优选的,所述转动轴的底部连接有转动齿轮,且转动齿轮的表面开设有槽孔,并且槽孔的内部固定连接有限位杆,同时转动齿轮的外侧连接有传动齿轮。
优选的,所述槽孔关于转动齿轮的中轴线对称设置有两个,且槽孔的内壁与限位杆的外表相互贴合,并且转动齿轮的直径大于传动齿轮的直径。
优选的,所述传动齿轮的中轴线与第一齿轮的中轴线相互重合,且第一齿轮通过链条与第二齿轮构成链传动结构。
优选的,所述连接带通过转动块与连接座构成转动结构,且连接带与弹性带之间为固定连接,并且弹性带与卡扣之间为卡合连接,同时卡扣关于限位带的外壁呈等距离设置。
优选的,所述锁定块的底部固定安装有伸缩弹簧,且锁定块的顶部连接有连接绳,并且锁定块的一端连接有活动块,同时活动块的底部固定有第二连接块,并且锁定块的外侧连接有盖板。
优选的,所述锁定块通过活动块与第二连接块构成转动结构,且锁定块与盖板之间为卡合连接,并且连接绳通过锁定块与伸缩弹簧构成弹性伸缩结构。
与现有技术相比,本发明的有益效果是:
1、该同步转动的人形铸造辅助机器人腰臂连接机构设置有弹性层和第一连接块,弹性层和连接层相连,弹性层为海绵材质,连接层将弹性层包裹在连接层的内部,进而来缓解对人体的压迫感,增加使用舒适性,同时连接层的外侧连接有第一连接块,且第一连接块设置有多个,可以增加身体与连接层之间的孔隙,进而让装置具有较好的透气性;
2、该同步转动的人形铸造辅助机器人腰臂连接机构设置有转动轴和转动齿轮,转动轴和转动齿轮相连,且转动齿轮上开设有槽孔,槽孔的内部安装有限位杆,且槽孔的俯视呈圆弧形设置,来对转动齿轮的转动角度进行限位,进而避免装置在自动辅助转动时,因转动角度较大,而导致转动齿轮和转动轴的转动角度较大而对患者腰部产生损伤的问题;
3、该同步转动的人形铸造辅助机器人腰臂连接机构设置有弹性带和限位带,拉动弹性带,弹性带和连接带相连,带动连接带通过转动块在连接座上转动,让弹性带和限位带上的卡扣相连,且卡扣等距离设置有多个,让使用者可以根据需求,来对松紧度进行调节,且调节操作较为的简单,便于使用者对其进行使用。
附图说明
图1为本发明的正视结构示意图;
图2为本发明的连接座与弹性带俯视连接结构示意图;
图3为本发明的弹性层与连接层俯视连接结构示意图;
图4为本发明的固定槽和啮合块连接结构示意图;
图5为本发明的转动齿轮侧视结构示意图;
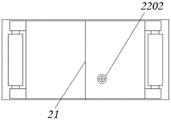
图6为本发明的连接座与盖板连接结构示意图;
图7为本发明的盖板正视结构示意图;
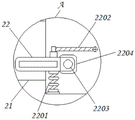
图8为本发明的图6中A处放大结构示意图。
图中:1、靠背;2、弹性层;3、连接层;4、第一连接块;5、固定槽;6、竖杆;7、滑块;8、锯齿块;9、啮合块;10、转动轴;1001、转动齿轮;1002、槽孔;1003、限位杆;11、连接座;12、传动齿轮;13、第一齿轮;14、链条;15、第二齿轮;16、转动块;17、连接带;18、弹性带;19、卡扣;20、限位带;21、盖板;22、锁定块;2201、伸缩弹簧;2202、连接绳;2203、活动块;2204、第二连接块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-8,本发明提供一种技术方案:一种同步转动的人形铸造辅助机器人腰臂连接机构,包括靠背1、弹性层2、连接层3、第一连接块4、固定槽5、竖杆6、滑块7、锯齿块8、啮合块9、转动轴10、转动齿轮1001、槽孔1002、限位杆1003、连接座11、传动齿轮12、第一齿轮13、链条14、第二齿轮15、转动块16、连接带17、弹性带18、卡扣19、限位带20、盖板21、锁定块22、伸缩弹簧2201、连接绳2202、活动块2203和第二连接块2204,靠背1的外侧连接有弹性层2,且弹性层2的外侧连接有连接层3,并且连接层3的外侧固定连接有第一连接块4,连接层3的两侧开设有固定槽5,且固定槽5的内部固定有竖杆6,竖杆6的外部贯穿有滑块7,且滑块7的底端固定连接有锯齿块8,并且锯齿块8的外侧安装有啮合块9,转动轴10安装于靠背1的底部,且转动轴10的底部固定有连接座11,连接座11的内部安装有传动齿轮12,且传动齿轮12的顶端固定安装有第一齿轮13,第一齿轮13的外侧连接有链条14,且第一齿轮13的左侧安装有第二齿轮15,转动块16安装于连接座11的两端,且转动块16的外侧连接有连接带17,连接带17的一端连接有弹性带18,且弹性带18的外侧固定安装有卡扣19,并且卡扣19的外侧连接有限位带20,盖板21安装于连接座11的外侧,且盖板21的内壁连接有锁定块22;
弹性层2的外侧与连接层3的内侧相互贴合,且第一连接块4关于连接层3的外壁层等距离设置,弹性层2和连接层3相连,弹性层2为海绵材质,连接层3将弹性层2包裹在连接层3的内部,进而来缓解对人体的压迫感,增加使用舒适性,同时连接层3的外侧连接有第一连接块4,且第一连接块4设置有多个,可以增加身体与连接层3之间的孔隙,进而让装置具有较好的透气性;
滑块7嵌套设置于竖杆6的内部,且滑块7通过锯齿块8与固定槽5构成滑动结构,并且锯齿块8与啮合块9之间为啮合连接,转动啮合块9,啮合块9和锯齿块8相连,带动锯齿块8和滑块7在固定槽5内运动,同时滑块7的内部贯穿有竖杆6,让滑块7的滑动较为的平稳,当滑块7转动时,带动滑块7外侧的松紧调节机构的高度进行调节,进而让装置可以根据需求来调节合适的高度,来对装置进行固定;
槽孔1002关于转动齿轮1001的中轴线对称设置有两个,且槽孔1002的内壁与限位杆1003的外表相互贴合,并且转动齿轮1001的直径大于传动齿轮12的直径,转动轴10和转动齿轮1001相连,且转动齿轮1001上开设有槽孔1002,槽孔1002的内部安装有限位杆1003,且槽孔1002的俯视呈圆弧形设置,来对转动齿轮1001的转动角度进行限位,进而避免装置在自动辅助转动时,因转动角度较大,而导致转动齿轮1001和转动轴10的转动角度较大而对患者腰部产生损伤的问题;
传动齿轮12的中轴线与第一齿轮13的中轴线相互重合,且第一齿轮13通过链条14与第二齿轮15构成链传动结构,第二齿轮15转动,第二齿轮15和链条14相连,带动链条14和第一齿轮13运动,第一齿轮13和传动齿轮12之间为固定连接,带动传动齿轮12转动,传动齿轮12和转动齿轮1001相连,进而带动转动齿轮1001运动,让装置具有自动辅助患者进行转动的效果,且多级齿轮构成的结构,来对转速进行降低,进而辅助转动的角度调节较为的柔和;
连接带17通过转动块16与连接座11构成转动结构,且连接带17与弹性带18之间为固定连接,并且弹性带18与卡扣19之间为卡合连接,同时卡扣19关于限位带20的外壁呈等距离设置,拉动弹性带18,弹性带18和连接带17相连,带动连接带17通过转动块16在连接座11上转动,让弹性带18和限位带20上的卡扣19相连,且卡扣19等距离设置有多个,让使用者可以根据需求,来对松紧度进行调节,且调节操作较为的简单,便于使用者对其进行使用;
锁定块22通过活动块2203与第二连接块2204构成转动结构,且锁定块22与盖板21之间为卡合连接,并且连接绳2202通过锁定块22与伸缩弹簧2201构成弹性伸缩结构,拉动连接绳2202,连接绳2202和锁定块22相连,带动锁定块22通过活动块2203在第二连接块2204上转动,让锁定块22与盖板21分离,让盖板21的打开和锁定较为的简单,进而便于盖板21内部的部件更换检修较为的便捷,同时锁定块22的底部连接有伸缩弹簧2201,当松掉连接绳2202时,伸缩弹簧2201带动锁定块22复位,来对盖板21进行锁定。
工作原理:该同步转动的人形铸造辅助机器人腰臂连接机构使用流程为,根据图1-2和图4,首先拉动弹性带18,弹性带18和连接带17相连,带动连接带17通过转动块16在连接座11上转动,让弹性带18和限位带20上的卡扣19相连,且卡扣19等距离设置有多个,让使用者可以根据需求,来对松紧度进行调节,转动啮合块9,啮合块9和锯齿块8相连,带动锯齿块8和滑块7在固定槽5内运动,同时滑块7的内部贯穿有竖杆6,让滑块7的滑动较为的平稳,当滑块7转动时,带动滑块7外侧的松紧调节机构的高度进行调节,以达到根据需求调节合适使用高度的目的;
根据图1-2、图3和图5,同时,弹性层2和连接层3相连,弹性层2为海绵材质,连接层3将弹性层2包裹在连接层3的内部,进而来缓解对人体的压迫感,增加使用舒适性,同时连接层3的外侧连接有第一连接块4,且第一连接块4设置有多个,可以增加身体与连接层3之间的孔隙,以达到装置具有较好透气性的目的,当使用者进行腰部转动时,带动靠背1和转动轴10在连接座11上转动,转动轴10和转动齿轮1001相连,且转动齿轮1001上开设有槽孔1002,槽孔1002的内部安装有限位杆1003,且槽孔1002的俯视呈圆弧形设置,来对转动齿轮1001的转动角度进行限位,以达到对转动角度进行限位的目的,同时让装置可以和使用者同步进行转动;
根据图1-2和图6-8,当第二齿轮15转动,第二齿轮15和链条14相连,带动链条14和第一齿轮13运动,第一齿轮13和传动齿轮12之间为固定连接,带动传动齿轮12转动,传动齿轮12和转动齿轮1001相连,进而带动转动齿轮1001运动,让装置具有自动辅助患者进行转动的效果,且多级齿轮构成的结构,来对转速进行降低,当需要对部件进行检修时,拉动连接绳2202,连接绳2202和锁定块22相连,带动锁定块22通过活动块2203在第二连接块2204上转动,让锁定块22与盖板21分离,让盖板21的打开和锁定较为的简单,以达到便于盖板21内部的部件更换检修较为的目的,同时锁定块22的底部连接有伸缩弹簧2201,当松掉连接绳2202时,伸缩弹簧2201带动锁定块22复位,来对盖板21进行锁定。
本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
Claims (4)
1.一种同步转动的人形铸造辅助机器人腰臂连接机构,包括靠背(1)、转动轴(10)、转动块(16)和盖板(21),其特征在于:所述靠背(1)的外侧连接有弹性层(2),且弹性层(2)的外侧连接有连接层(3),并且连接层(3)的外侧固定连接有第一连接块(4),所述连接层(3)的两侧开设有固定槽(5),且固定槽(5)的内部固定有竖杆(6),所述竖杆(6)的外部贯穿有滑块(7),且滑块(7)的底端固定连接有锯齿块(8),并且锯齿块(8)的外侧安装有啮合块(9),所述转动轴(10)安装于靠背(1)的底部,且转动轴(10)的底部固定有连接座(11),所述连接座(11)的内部安装有传动齿轮(12),且传动齿轮(12)的顶端固定安装有第一齿轮(13),所述第一齿轮(13)的外侧连接有链条(14),且第一齿轮(13)的左侧安装有第二齿轮(15),所述转动块(16)安装于连接座(11)的两端,且转动块(16)的外侧连接有连接带(17),所述连接带(17)的一端连接有弹性带(18),且弹性带(18)的外侧固定安装有卡扣(19),并且卡扣(19)的外侧连接有限位带(20),所述盖板(21)安装于连接座(11)的外侧,且盖板(21)的内壁连接有锁定块(22),所述弹性层(2)的外侧与连接层(3)的内侧相互贴合,且第一连接块(4)关于连接层(3)的外壁层等距离设置,所述滑块(7)嵌套设置于竖杆(6)的内部,且滑块(7)通过锯齿块(8)与固定槽(5)构成滑动结构,并且锯齿块(8)与啮合块(9)之间为啮合连接,所述转动轴(10)的底部连接有转动齿轮(1001),且转动齿轮(1001)的表面开设有槽孔(1002),并且槽孔(1002)的内部固定连接有限位杆(1003),同时转动齿轮(1001)的外侧连接有传动齿轮(12),所述槽孔(1002)关于转动齿轮(1001)的中轴线对称设置有两个,且槽孔(1002)的内壁与限位杆(1003)的外表相互贴合,并且转动齿轮(1001)的直径大于传动齿轮(12)的直径,所述传动齿轮(12)的中轴线与第一齿轮(13)的中轴线相互重合,且第一齿轮(13)通过链条(14)与第二齿轮(15)构成链传动结构。
2.根据权利要求1所述的一种同步转动的人形铸造辅助机器人腰臂连接机构,其特征在于:所述连接带(17)通过转动块(16)与连接座(11)构成转动结构,且连接带(17)与弹性带(18)之间为固定连接,并且弹性带(18)与卡扣(19)之间为卡合连接,同时卡扣(19)关于限位带(20)的外壁呈等距离设置。
3.根据权利要求1所述的一种同步转动的人形铸造辅助机器人腰臂连接机构,其特征在于:所述锁定块(22)的底部固定安装有伸缩弹簧(2201),且锁定块(22)的顶部连接有连接绳(2202),并且锁定块(22)的一端连接有活动块(2203),同时活动块(2203)的底部固定有第二连接块(2204),并且锁定块(22)的外侧连接有盖板(21)。
4.根据权利要求3所述的一种同步转动的人形铸造辅助机器人腰臂连接机构,其特征在于:所述锁定块(22)通过活动块(2203)与第二连接块(2204)构成转动结构,且锁定块(22)与盖板(21)之间为卡合连接,并且连接绳(2202)通过锁定块(22)与伸缩弹簧(2201)构成弹性伸缩结构。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011489762.4A CN112606037B (zh) | 2020-12-16 | 2020-12-16 | 一种同步转动的人形铸造辅助机器人腰臂连接机构 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011489762.4A CN112606037B (zh) | 2020-12-16 | 2020-12-16 | 一种同步转动的人形铸造辅助机器人腰臂连接机构 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN112606037A CN112606037A (zh) | 2021-04-06 |
| CN112606037B true CN112606037B (zh) | 2022-11-08 |
Family
ID=75239934
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011489762.4A Active CN112606037B (zh) | 2020-12-16 | 2020-12-16 | 一种同步转动的人形铸造辅助机器人腰臂连接机构 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112606037B (zh) |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103610568A (zh) * | 2013-12-16 | 2014-03-05 | 哈尔滨工业大学 | 一种拟人化的下肢助力外骨骼机器人 |
| CN204709093U (zh) * | 2015-05-20 | 2015-10-21 | 杜宇航 | 一种分离式外骨骼系统 |
| CN109202863A (zh) * | 2017-07-04 | 2019-01-15 | 现代自动车株式会社 | 可穿戴式肌肉力量辅助装置及其控制方法和系统 |
| CN109223456A (zh) * | 2018-10-23 | 2019-01-18 | 哈尔滨工业大学 | 一种基于人机末端交互的下肢外骨骼机器人系统 |
| CN111150544A (zh) * | 2020-01-16 | 2020-05-15 | 赵莉 | 一种用于疼痛科的可穿戴式颈椎辅助治疗装置 |
| CN111283661A (zh) * | 2020-02-13 | 2020-06-16 | 北京工业大学 | 一种穿戴式单电机驱动腰部助力装置 |
| CN211094048U (zh) * | 2019-07-23 | 2020-07-28 | 陈健 | 一种穿戴式心脑血管疾病智能检测装置 |
| CN211139092U (zh) * | 2019-12-11 | 2020-07-31 | 重庆澳腾汽车部件有限责任公司 | 一种便于调节角度的正驾驶座椅靠背骨架总成 |
| CN111685975A (zh) * | 2020-07-21 | 2020-09-22 | 黄河科技学院 | 腰部助力外骨骼 |
| CN211729161U (zh) * | 2019-12-26 | 2020-10-23 | 中国科学院沈阳自动化研究所 | 轻型可穿戴式局部力反馈仿生双臂外骨骼主手 |
| CN211940926U (zh) * | 2020-04-02 | 2020-11-17 | 深圳市盛唐伟业环保设备有限公司 | 一种辅助下肢锻炼的可穿戴机器人 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110202542B (zh) * | 2017-09-07 | 2022-08-23 | 重庆市牛迪科技发展有限公司 | 一种外骨骼 |
-
2020
- 2020-12-16 CN CN202011489762.4A patent/CN112606037B/zh active Active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103610568A (zh) * | 2013-12-16 | 2014-03-05 | 哈尔滨工业大学 | 一种拟人化的下肢助力外骨骼机器人 |
| CN204709093U (zh) * | 2015-05-20 | 2015-10-21 | 杜宇航 | 一种分离式外骨骼系统 |
| CN109202863A (zh) * | 2017-07-04 | 2019-01-15 | 现代自动车株式会社 | 可穿戴式肌肉力量辅助装置及其控制方法和系统 |
| CN109223456A (zh) * | 2018-10-23 | 2019-01-18 | 哈尔滨工业大学 | 一种基于人机末端交互的下肢外骨骼机器人系统 |
| CN211094048U (zh) * | 2019-07-23 | 2020-07-28 | 陈健 | 一种穿戴式心脑血管疾病智能检测装置 |
| CN211139092U (zh) * | 2019-12-11 | 2020-07-31 | 重庆澳腾汽车部件有限责任公司 | 一种便于调节角度的正驾驶座椅靠背骨架总成 |
| CN211729161U (zh) * | 2019-12-26 | 2020-10-23 | 中国科学院沈阳自动化研究所 | 轻型可穿戴式局部力反馈仿生双臂外骨骼主手 |
| CN111150544A (zh) * | 2020-01-16 | 2020-05-15 | 赵莉 | 一种用于疼痛科的可穿戴式颈椎辅助治疗装置 |
| CN111283661A (zh) * | 2020-02-13 | 2020-06-16 | 北京工业大学 | 一种穿戴式单电机驱动腰部助力装置 |
| CN211940926U (zh) * | 2020-04-02 | 2020-11-17 | 深圳市盛唐伟业环保设备有限公司 | 一种辅助下肢锻炼的可穿戴机器人 |
| CN111685975A (zh) * | 2020-07-21 | 2020-09-22 | 黄河科技学院 | 腰部助力外骨骼 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112606037A (zh) | 2021-04-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20120087801A (ko) | 헬멧식 마사지기 및 그 헬멧 | |
| CN110327183B (zh) | 一种医用骨科康复治疗设备 | |
| CN110974601A (zh) | 介入科护理用康复锻炼装置 | |
| CN111054032A (zh) | 一种穿戴式手腕康复护理锻炼装置 | |
| WO2011050621A1 (zh) | 头盔式按摩器及其头盔 | |
| CN109157040B (zh) | 多功能picc导管维护座椅 | |
| CN112606037B (zh) | 一种同步转动的人形铸造辅助机器人腰臂连接机构 | |
| CN210145027U (zh) | 床式步态康复训练系统 | |
| CN209564354U (zh) | 一种妇幼保健儿童手术用可调节约束装置 | |
| CN111119305B (zh) | 一种节水型一体式马桶结构 | |
| CN210843692U (zh) | 一种颈椎牵引器 | |
| CN209827464U (zh) | 神经内科功能训练护理床 | |
| CN201058101Y (zh) | 按摩装置 | |
| CN204744723U (zh) | 多用途自动翻身床 | |
| CN211797584U (zh) | 一种用于外骨骼机器人腰部两侧连杆的同步伸缩装置 | |
| CN208726734U (zh) | 一种无级锁止的玩具腿部 | |
| CN209596305U (zh) | 用于小儿头皮穿刺的约束装置 | |
| CN207241602U (zh) | 一种新型轮椅固定装置 | |
| CN213250105U (zh) | 一种腰背矫正康复理疗保健器 | |
| CN111529231A (zh) | 轮椅床 | |
| CN217066930U (zh) | 一种医疗诊断床 | |
| CN113230087B (zh) | 一种气动肌肉驱动的柔性穿套式肢体康复装置 | |
| CN212439918U (zh) | 一种便携式指尖康复拉力装置 | |
| CN220813031U (zh) | 一种针织布的多通道传送吹边机构 | |
| CN211722503U (zh) | 一种辅助运动床 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |