CN211940926U - 一种辅助下肢锻炼的可穿戴机器人 - Google Patents
一种辅助下肢锻炼的可穿戴机器人 Download PDFInfo
- Publication number
- CN211940926U CN211940926U CN202020468170.3U CN202020468170U CN211940926U CN 211940926 U CN211940926 U CN 211940926U CN 202020468170 U CN202020468170 U CN 202020468170U CN 211940926 U CN211940926 U CN 211940926U
- Authority
- CN
- China
- Prior art keywords
- driving wheel
- wheel
- mounting
- arc
- lower limb
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Abstract
本实用新型提供了一种辅助下肢锻炼的可穿戴机器人,包括有腰部固定件、大腿固定件和调节装置,所述腰部固定件的两端设有第一弧形夹板,所述调节装置包括有驱动电机,所述驱动电机的输出端连接有第一主动轮和第二主动轮,所述第一主动轮的一侧连接有第一从动轮,所述第一从动轮的底端连接有第三主动轮,所述第三主动轮的一侧连接有第三从动轮,所述第二主动轮的一侧连接有第二从动轮,所述第二从动轮的顶端连接有第四主动轮,所述第四主动轮的一侧连接有第四从动轮,所述第四从动轮和所述第三从动轮的底端连接有螺纹杆。本实用新型通过调节装置能够根据不同患者的腿长进行个性化的伸缩,能够很好地满足实际应用的需要,有利于康复训练技术的推广。
Description
技术领域
本实用新型涉及医疗康复机器人设备技术领域,主要涉及一种辅助下肢锻炼的可穿戴机器人。
背景技术
越来越多疾病或者意外康复的患者需要进行康复锻炼,一些无法自行行走的病人需要医疗器械来进行康复锻炼和辅助行走,迫切需 要一些医疗器械来帮助他们更快的恢复和重新站起来。下肢康复训练机器人是根据康复医学理论和人机合作机器人原理,通过一套计算 机控制下的走步状态控制系统,使患者模拟正常人的步伐规律作康复训练运动,锻炼下肢的肌肉,恢复神经系统对行走功能的控制能力,达到恢复走路机能的目的。现有的下肢康复机器人存在的主要缺陷有:结构复杂,体积庞大,不能够根据不同患者的腿长进行个性化的伸缩,不能很好地满足实际应用的需要,不利于康复训练技术的推广。因此我们需要研制一种可调节的辅助下肢锻炼的可穿戴机器人。
实用新型内容
本实用新型主要提供了一种辅助下肢锻炼的可穿戴机器人,用以解决上述背景技术中提出的技术问题。
本实用新型解决上述技术问题采用的技术方案为:
一种辅助下肢锻炼的可穿戴机器人,包括有腰部固定件、大腿固定件和调节装置,所述腰部固定件的两端对称设置有第一弧形夹板,两个所述第一弧形夹板的外侧底部均焊接有第一固定块;
所述大腿固定件与两个所述第一弧形夹板相同的一侧均焊接有第二固定块,且所述调节装置包括有设置在所述腰部固定件一侧的呈垂直设置的驱动电机,所述驱动电机的输出端从上到下依次连接有第一主动轮和第二主动轮,所述第一主动轮的一侧通过皮带转动连接有第一从动轮,所述第一从动轮的底端中心处通过转轴连接有第三主动轮,所述第三主动轮靠近所述第一弧形夹板的一侧通过皮带转动连接有第三从动轮,且所述第二主动轮远离所述第一从动轮的一侧通过皮带转动连接有第二从动轮,所述第二从动轮的顶端中心处通过转轴连接有第四主动轮,所述第四主动轮靠近所述第一弧形夹板的一侧通过皮带转动连接有第四从动轮,所述第四从动轮和所述第三从动轮的底端中心处均连接有螺纹杆,两个所述螺纹杆的底端依次贯穿对应所述第一固定块和第二固定块。
优选的,两个所述第一固定块的底部两端均对称焊接有导向杆,每个所述导向杆的底端均贯穿对应所述第二固定块呈滑动连接。
优选的,所述腰部固定件的顶端中心处设有主动伸缩杆,所述主动伸缩杆的两侧对称设有从动伸缩杆,且所述主动伸缩杆和两个所述从动伸缩杆的顶端共同连接有背部固定件,所述背部固定件的内侧设有第一软垫。
优选的,所述背部固定件内设有隔板,所述隔板的两侧对称设有内腔室,两个所述内腔室的底端均等间距开设有多个限位槽,且两个所述内腔室相反的一侧均开设有插口。
优选的,所述背部固定件的两端对称设有调节件,两个所述调节件均包括有设置在对应所述内腔室内的延伸板,两个所述延伸板的高度尺寸均小于对应所述插口的高度尺寸,两个所述延伸板相向的一端底部均焊接有限位板,两个所述限位板均与对应所述限位槽相卡接。
优选的,两个所述延伸板相反的一端侧壁上均连接有扶手。
优选的,两个所述大腿固定件的底端均通过连杆连接有小腿固定件,两个所述小腿固定件的底端均通过连杆连接有脚踝固定件,两个所述脚踝固定件的底端均连接有脚部支撑件。
优选的,所述大腿固定件由三个第二弧形夹板环绕组成,每个所述第二弧形夹板的一端均开设有卡槽,且每个所述第二弧形夹板远离所述卡槽的一端均连接有卡扣,每个所述卡扣均与相邻所述第二弧形夹板一端的卡槽相卡接。
优选的,每个所述第二弧形夹板的内侧均设有第二软垫。
与现有技术相比,本实用新型的有益效果是:
其一:本实用新型主要通过启动驱动电机工作,使得驱动电机驱动第一主动轮和第二主动轮转动,第一主动轮和第二主动轮均通过皮带带动第一从动轮和第二从动轮转动,第一从动轮和第二从动轮均通过转轴带动第三主动轮和第四主动轮转动,从而使得第三主动轮和第四主动轮通过皮带带动第三从动轮和第四从动轮旋转,第四从动轮和第三从动轮即可通过螺纹杆旋转带动第二固定块移动,由于两个第一固定块的底部均通过导向杆贯穿对应第二固定块呈滑动连接的设计,从而可以通过螺纹杆带动第二固定块进行升降,第二固定块进而带动大腿固定件进行升降,即可调节腰部固定件与大腿固定件之间的距离,能够根据不同患者的腿长进行个性化的伸缩,能够很好地满足实际应用的需要,有利于康复训练技术的推广;
其二:通过主动伸缩杆和两个从动伸缩杆的设计,能够有效的进行调节腰部固定件和背部固定件之间的距离,从而便于适用于不同身高的用户,通过背部固定件内侧的第一软垫的设计,能够有效的提高用户使用时的舒适度,通过延伸板的高度尺寸小于插口的高度尺寸的设计,从而可以通过手动拖起延伸板,使得限位板与对应限位槽相分离,即可通过移动延伸板调节两个延伸板之间的距离,从而便于适用于不同背部尺寸不同的用户进行使用,适用性较强;
其三:通过大腿固定件由三个第二弧形夹板环绕组成以及卡扣与相邻第二弧形夹板一端的卡槽相卡接的设计,可以通过调节三个第二弧形夹板之间的距离来调节大腿固定件的直径尺寸,从而即可适用于大腿不同粗细度的用户使用。
以下将结合附图与具体的实施例对本实用新型进行详细的解释说明。
附图说明
图1是本实用新型的整体结构示意图;
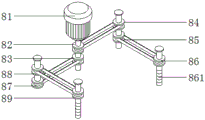
图2是本实用新型的调节装置示意图;
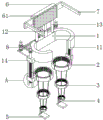
图3是本实用新型的背部固定件剖视图;
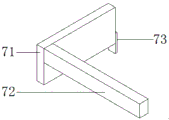
图4是本实用新型的调节件示意图;
图5是本实用新型的第二弧形夹板示意;
图6是图1中的A区放大图。
附图标记:1、腰部固定件;11、第一弧形夹板;12、主动伸缩杆;13、从动伸缩杆;14、第一固定块;141、导向杆;2、大腿固定件;21、第二弧形夹板;211、卡槽;212、卡扣;22、第二软垫;23、第二固定块;3、小腿固定件;4、脚踝固定件;5、脚部支撑件;6、背部固定件;61、第一软垫;62、隔板;63、内腔室;64、插口;65、限位槽;7、调节件;71、延伸板;72、扶手;73、限位板;8、调节装置;81、驱动电机;82、第一主动轮;83、第二主动轮;84、第一从动轮;85、第三主动轮;86、第三从动轮;861、螺纹杆;87、第二从动轮;88、第四主动轮;89、第四从动轮。
具体实施方式
为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更加全面的描述,附图中给出了本实用新型的若干实施例,但是本实用新型可以通过不同的形式来实现,并不限于文本所描述的实施例,相反的,提供这些实施例是为了使对本实用新型公开的内容更加透彻全面。
需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上也可以存在居中的元件,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件,本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常连接的含义相同,本文中在本实用新型的说明书中所使用的术语知识为了描述具体的实施例的目的,不是旨在于限制本实用新型,本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
请参照附图1-6,一种辅助下肢锻炼的可穿戴机器人,包括有腰部固定件1、大腿固定件2和调节装置8,所述腰部固定件1的两端对称设置有第一弧形夹板11,两个所述第一弧形夹板11的外侧底部均焊接有第一固定块14,所述大腿固定件2与两个所述第一弧形夹板11相同的一侧均焊接有第二固定块23,且所述调节装置8包括有设置在所述腰部固定件1一侧的呈垂直设置的驱动电机81,所述驱动电机81的输出端从上到下依次连接有第一主动轮82和第二主动轮83,所述第一主动轮82的一侧通过皮带转动连接有第一从动轮84,所述第一从动轮84的底端中心处通过转轴连接有第三主动轮85,所述第三主动轮85靠近所述第一弧形夹板11的一侧通过皮带转动连接有第三从动轮86,且所述第二主动轮83远离所述第一从动轮84的一侧通过皮带转动连接有第二从动轮87,所述第二从动轮87的顶端中心处通过转轴连接有第四主动轮88,所述第四主动轮88靠近所述第一弧形夹板11的一侧通过皮带转动连接有第四从动轮89,所述第四从动轮89和所述第三从动轮86的底端中心处均连接有螺纹杆861,两个所述螺纹杆861的底端依次贯穿对应所述第一固定块14和第二固定块23,两个所述第一固定块14的底部两端均对称焊接有导向杆141,每个所述导向杆141的底端均贯穿对应所述第二固定块23呈滑动连接。
请参照附图1、3和4,所述腰部固定件1的顶端中心处设有主动伸缩杆12,所述主动伸缩杆12的两侧对称设有从动伸缩杆13,且所述主动伸缩杆12和两个所述从动伸缩杆13的顶端共同连接有背部固定件6,所述背部固定件6的内侧设有第一软垫61,所述背部固定件6内设有隔板62,所述隔板62的两侧对称设有内腔室63,两个所述内腔室63的底端均等间距开设有多个限位槽65,且两个所述内腔室63相反的一侧均开设有插口64,所述背部固定件6的两端对称设有调节件7,两个所述调节件7均包括有设置在对应所述内腔室63内的延伸板71,两个所述延伸板71的高度尺寸均小于对应所述插口64的高度尺寸,两个所述延伸板71相向的一端底部均焊接有限位板73,两个所述限位板73均与对应所述限位槽65相卡接,两个所述延伸板71相反的一端侧壁上均连接有扶手72。在本实施例中,通过延伸板71的高度尺寸小于插口64的高度尺寸的设计,从而可以通过手动拖起延伸板71,使得限位板73与对应限位槽65相分离,即可通过移动延伸板71调节两个延伸板71之间的距离,从而便于适用于不同背部尺寸不同的用户进行使用,适用性较强。
请参照附图1和5,两个所述大腿固定件2的底端均通过连杆连接有小腿固定件3,两个所述小腿固定件3的底端均通过连杆连接有脚踝固定件4,两个所述脚踝固定件4的底端均连接有脚部支撑件5,所述大腿固定件2由三个第二弧形夹板21环绕组成,每个所述第二弧形夹板21的一端均开设有卡槽211,且每个所述第二弧形夹板21远离所述卡槽211的一端均连接有卡扣212,每个所述卡扣212均与相邻所述第二弧形夹板21一端的卡槽211相卡接,每个所述第二弧形夹板21的内侧均设有第二软垫22。在本实施例中,通过大腿固定件2由三个第二弧形夹板21环绕组成以及卡扣212与相邻第二弧形夹板21一端的卡槽211相卡接的设计,可以通过调节三个第二弧形夹板21之间的距离来调节大腿固定件2的直径尺寸,从而即可适用于大腿不同粗细度的用户使用。
本实用新型的具体操作方式如下:
当需要使用本实用新型时,当需要进行调节腰部固定件1与大腿固定件2之间距离时,首先启动驱动电机81工作,驱动电机81驱动第一主动轮82和第二主动轮83转动,第一主动轮82和第二主动轮83均通过皮带带动第一从动轮84和第二从动轮87转动,第一从动轮84和第二从动轮87均通过转轴带动第三主动轮85和第四主动轮88转动,然后第三主动轮85和第四主动轮88通过皮带带动第三从动轮86和第四从动轮89旋转,第四从动轮89和第三从动轮86即可通过螺纹杆861旋转带动第二固定块23移动,进而可以调节腰部固定件1与大腿固定件2之间的距离。
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定,因此本实用新型的实施例只是针对本实用新型的一个说明示例,无论从哪一点来看本实用新型的实施例都不构成对本实用新型的限制。
Claims (9)
1.一种辅助下肢锻炼的可穿戴机器人,包括有腰部固定件(1)、大腿固定件(2)和调节装置(8),其特征在于:所述腰部固定件(1)的两端对称设置有第一弧形夹板(11),两个所述第一弧形夹板(11)的外侧底部均焊接有第一固定块(14);
所述大腿固定件(2)与两个所述第一弧形夹板(11)相同的一侧均焊接有第二固定块(23),且所述调节装置(8)包括有设置在所述腰部固定件(1)一侧的呈垂直设置的驱动电机(81),所述驱动电机(81)的输出端从上到下依次连接有第一主动轮(82)和第二主动轮(83),所述第一主动轮(82)的一侧通过皮带转动连接有第一从动轮(84),所述第一从动轮(84)的底端中心处通过转轴连接有第三主动轮(85),所述第三主动轮(85)靠近所述第一弧形夹板(11)的一侧通过皮带转动连接有第三从动轮(86),且所述第二主动轮(83)远离所述第一从动轮(84)的一侧通过皮带转动连接有第二从动轮(87),所述第二从动轮(87)的顶端中心处通过转轴连接有第四主动轮(88),所述第四主动轮(88)靠近所述第一弧形夹板(11)的一侧通过皮带转动连接有第四从动轮(89),所述第四从动轮(89)和所述第三从动轮(86)的底端中心处均连接有螺纹杆(861),两个所述螺纹杆(861)的底端依次贯穿对应所述第一固定块(14)和第二固定块(23)。
2.根据权利要求1所述的一种辅助下肢锻炼的可穿戴机器人,其特征在于:两个所述第一固定块(14)的底部两端均对称焊接有导向杆(141),每个所述导向杆(141)的底端均贯穿对应所述第二固定块(23)呈滑动连接。
3.根据权利要求1所述的一种辅助下肢锻炼的可穿戴机器人,其特征在于:所述腰部固定件(1)的顶端中心处设有主动伸缩杆(12),所述主动伸缩杆(12)的两侧对称设有从动伸缩杆(13),且所述主动伸缩杆(12)和两个所述从动伸缩杆(13)的顶端共同连接有背部固定件(6),所述背部固定件(6)的内侧设有第一软垫(61)。
4.根据权利要求3所述的一种辅助下肢锻炼的可穿戴机器人,其特征在于:所述背部固定件(6)内设有隔板(62),所述隔板(62)的两侧对称设有内腔室(63),两个所述内腔室(63)的底端均等间距开设有多个限位槽(65),且两个所述内腔室(63)相反的一侧均开设有插口(64)。
5.根据权利要求4所述的一种辅助下肢锻炼的可穿戴机器人,其特征在于:所述背部固定件(6)的两端对称设有调节件(7),两个所述调节件(7)均包括有设置在对应所述内腔室(63)内的延伸板(71),两个所述延伸板(71)的高度尺寸均小于对应所述插口(64)的高度尺寸,两个所述延伸板(71)相向的一端底部均焊接有限位板(73),两个所述限位板(73)均与对应所述限位槽(65)相卡接。
6.根据权利要求5所述的一种辅助下肢锻炼的可穿戴机器人,其特征在于:两个所述延伸板(71)相反的一端侧壁上均连接有扶手(72)。
7.根据权利要求1所述的一种辅助下肢锻炼的可穿戴机器人,其特征在于:两个所述大腿固定件(2)的底端均通过连杆连接有小腿固定件(3),两个所述小腿固定件(3)的底端均通过连杆连接有脚踝固定件(4),两个所述脚踝固定件(4)的底端均连接有脚部支撑件(5)。
8.根据权利要求7所述的一种辅助下肢锻炼的可穿戴机器人,其特征在于:所述大腿固定件(2)由三个第二弧形夹板(21)环绕组成,每个所述第二弧形夹板(21)的一端均开设有卡槽(211),且每个所述第二弧形夹板(21)远离所述卡槽(211)的一端均连接有卡扣(212),每个所述卡扣(212)均与相邻所述第二弧形夹板(21)一端的卡槽(211)相卡接。
9.根据权利要求8所述的一种辅助下肢锻炼的可穿戴机器人,其特征在于:每个所述第二弧形夹板(21)的内侧均设有第二软垫(22)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202020468170.3U CN211940926U (zh) | 2020-04-02 | 2020-04-02 | 一种辅助下肢锻炼的可穿戴机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202020468170.3U CN211940926U (zh) | 2020-04-02 | 2020-04-02 | 一种辅助下肢锻炼的可穿戴机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN211940926U true CN211940926U (zh) | 2020-11-17 |
Family
ID=73168738
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202020468170.3U Expired - Fee Related CN211940926U (zh) | 2020-04-02 | 2020-04-02 | 一种辅助下肢锻炼的可穿戴机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN211940926U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112606037A (zh) * | 2020-12-16 | 2021-04-06 | 安徽恒利增材制造科技有限公司 | 一种同步转动的人形铸造辅助机器人腰臂连接机构 |
-
2020
- 2020-04-02 CN CN202020468170.3U patent/CN211940926U/zh not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112606037A (zh) * | 2020-12-16 | 2021-04-06 | 安徽恒利增材制造科技有限公司 | 一种同步转动的人形铸造辅助机器人腰臂连接机构 |
| CN112606037B (zh) * | 2020-12-16 | 2022-11-08 | 安徽恒利增材制造科技有限公司 | 一种同步转动的人形铸造辅助机器人腰臂连接机构 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100942968B1 (ko) | 재활치료용 운동기구 | |
| CN106176143B (zh) | 一种多姿态下肢康健训练椅 | |
| JP2012213616A (ja) | 歩行訓練機器およびその使用方法 | |
| CN210472965U (zh) | 一种临床调节式四肢康复器 | |
| CN103637864A (zh) | 脑瘫综合康复训练辅具 | |
| CN110478191A (zh) | 一种新型腿部非拟人型外骨骼康复机器人 | |
| CN203662957U (zh) | 脑瘫综合康复训练辅具 | |
| CN113082627A (zh) | 一种辅助训练康复设备 | |
| CN211940926U (zh) | 一种辅助下肢锻炼的可穿戴机器人 | |
| CN211610609U (zh) | 一种康复辅助固定装置 | |
| CN113730175A (zh) | 柔性十字架牵引康复床 | |
| CN215652121U (zh) | 新型下肢康复训练护理设备 | |
| CN108670519B (zh) | 一种骨科康复用可调节的电动牵引装置 | |
| CN105617612A (zh) | 改善膝关节僵直度和灵活性的便携式锻炼装置及使用方法 | |
| WO2017111286A1 (ko) | 관절 재활치료기 | |
| WO2018117897A1 (ru) | Многофункциональная больничная кровать для реабилитации, трансформируемая в вертикализатор | |
| CN213250902U (zh) | 一种神经外科用多功能康复锻炼装置 | |
| CN114404209B (zh) | 骨科膝关节置换手术用下肢固定装置 | |
| CN211535402U (zh) | 一种骨科用辅助牵引装置 | |
| CN213157471U (zh) | Icu患者肢体辅助锻炼运动器 | |
| CN109009874A (zh) | 多功能医用肩关节康复训练器 | |
| CN215081692U (zh) | 一种骨科护理用锻炼架 | |
| CN210844071U (zh) | 一种下肢康复训练机 | |
| CN210125132U (zh) | 一种用于康复器械或健身器械的可调式拉力装置 | |
| CN220695767U (zh) | 康复锻炼装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20201117 Termination date: 20210402 |