CN1117018A - 快速升降式千斤顶 - Google Patents
快速升降式千斤顶 Download PDFInfo
- Publication number
- CN1117018A CN1117018A CN94114934A CN94114934A CN1117018A CN 1117018 A CN1117018 A CN 1117018A CN 94114934 A CN94114934 A CN 94114934A CN 94114934 A CN94114934 A CN 94114934A CN 1117018 A CN1117018 A CN 1117018A
- Authority
- CN
- China
- Prior art keywords
- nut
- screw rod
- cam
- actuating unit
- lifting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F3/00—Devices, e.g. jacks, adapted for uninterrupted lifting of loads
- B66F3/08—Devices, e.g. jacks, adapted for uninterrupted lifting of loads screw operated
- B66F3/12—Devices, e.g. jacks, adapted for uninterrupted lifting of loads screw operated comprising toggle levers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q5/00—Driving or feeding mechanisms; Control arrangements therefor
- B23Q5/22—Feeding members carrying tools or work
- B23Q5/34—Feeding other members supporting tools or work, e.g. saddles, tool-slides, through mechanical transmission
- B23Q5/38—Feeding other members supporting tools or work, e.g. saddles, tool-slides, through mechanical transmission feeding continuously
- B23Q5/40—Feeding other members supporting tools or work, e.g. saddles, tool-slides, through mechanical transmission feeding continuously by feed shaft, e.g. lead screw
- B23Q5/408—Nut bearings therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B1/00—Vices
- B25B1/06—Arrangements for positively actuating jaws
- B25B1/10—Arrangements for positively actuating jaws using screws
- B25B1/12—Arrangements for positively actuating jaws using screws with provision for disengagement
- B25B1/125—Arrangements for positively actuating jaws using screws with provision for disengagement with one screw perpendicular to the jaw faces
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
- F16H25/2025—Screw mechanisms with means to disengage the nut or screw from their counterpart; Means for connecting screw and nut for stopping reciprocating movement
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
- Y10T74/19642—Directly cooperating gears
- Y10T74/19698—Spiral
- Y10T74/19702—Screw and nut
- Y10T74/19735—Nut disengageable from screw
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/19—Gearing
- Y10T74/19642—Directly cooperating gears
- Y10T74/19698—Spiral
- Y10T74/19702—Screw and nut
- Y10T74/19805—Less than 360 degrees of contact between nut and screw
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Structural Engineering (AREA)
- Transmission Devices (AREA)
Abstract
本发明属常规起重工具,是一种具有快速升降功能的千斤顶,其特征在于有一套“自动同步开合式半螺母装置”由支承座、半螺母和半螺母自动开合执行机构组成。加上锁定机构,也可使其恢复慢升、慢降的功能。若加装上电动机则可变成新型的具有快速升降式电动千斤顶。本发明的开合式半螺母装置可广泛应用在一切用螺杆传动而又需要快速移动的装置上。
Description
本发明属于一种起重工具,是一种具有快速升降功能的千斤顶,特别适合作轿车的随车维修工具。其发明中的核心“自动开合式半螺母装置”除用于千斤顶外,还可用于手工台虎钳、机床平口钳、机床滑台、建筑用手脚架及其它用螺杆螺母运动副而又需要快速越过空行程的装置上。
图1-I是目前常用在汽车维修中的一种换汽车轮胎的千斤顶结构原理示意图,由底座10.5、托顶10.6、四个带扇形齿轮的连杆10.1~4、螺杆4、左铰链轴O2、右铰链轴O1、平面轴承10.8、保险销10.10、绳索10.11以及与右铰链轴O1制成一体的铰链轴螺母“K”组成。螺杆4左端与铰链轴O2相连接,右端螺纹部分与铰链轴O1一体的螺母“K”相配合。工作时当人们转动螺杆4,通过螺母“K”的作用使左、右两铰链轴O2和O1之间距离缩小或增大,通过连杆机构的作用,则托顶10.6就将汽车W升起或落下。其缺点是因螺母“K”是整体的螺母,不能快速越过空行程,所以工作效率低。
本发明目的在于克服上述缺点,提供一种具有快速升降功能的千斤顶。
本发明的技术方案是将原图1—I中设在右铰链轴O1上的整体螺母“K”改为图1-II和图1-III中的一种“快速自动同步开合式半螺母装置F”,(以下简称“F螺母”),其余相同,其特征为:“F螺母”可设在某一个铰链轴上,如图1-II中的右铰链轴“O1”上,其螺杆4的右部外园上有螺纹与其“F螺母”中的相应半螺母相配合,而其螺杆4的左部端头穿过左铰链轴O2中心孔与输入转动力矩的“传动装置相连接(如手柄接头、变速箱、电机等);其“F螺母”也可同时分别设置在千斤顶的两个铰链轴“O1”和“O2”上,如图I-III所示,但这两个“F螺母″以及相应与其配合的螺杆4的左、右两部分的螺杆,其螺纹的螺旋方向要相反,如设置在左铰链轴O2上的“F螺母”和相配合的螺杆4左部上的螺纹是左旋扣(或右旋扣),则设置在右铰链轴O1上的“F螺母”及相应配合的螺杆4右部上的螺纹必须是右旋扣(或左旋扣),另其转动螺杆4的传动装置可设在螺杆的一端。“F螺母”由:(1)支承座;(2)1个或多个半螺母;(3)半螺母自动同步开合机构组成。螺杆上有螺纹,穿过″F螺母″中的支承座的支承孔与相应的半螺母及其自动开合机构相配合。这三个组成部分的特点:(1)支承座:其上设有与应用载体(如千斤顶)相连接的构件(如铰链轴)、与螺杆相连接的构件(如支承孔)、与半螺母相配合的构件(如升降导轨)、还安有限位机构、快慢速变换机构;(2)半螺母,其数量为1个或多个,其上具有不大于半周的内螺纹、升降滑动导轨、产生并传递升降力的外周面和执行件(如凸轮廓线、面凸轮导销),有时半螺母上还设有与实用裁体相连接配合的构件(如铰链轴、支承定位面);(3)″半螺母自动同步开合机构″具有:自动同步过载离合机构、螺杆半螺母相对开合执行机构、开合行程限位机构、起升后防止螺杆再转动的保险机构,有时还设有快、慢速交换操纵机构(使千斤顶下降时也有慢速功能)。
本发明的优点在于因采用了“F螺母”,使千斤顶具有快速越过空行程的功能,提高了工效,特别是快速下落时冲击较大,正好轿车设计有完善的弹簧和轮胎的抗震系统,这潜力得到了充分利用。此外,若安装上电动机,当把汽车W顶升后,下落时,只要电动机刚一反转,汽力即刻可在重力作用下立即下落,故下落时还能节省电力。
附图说明
图1-I为用现有技术右铰链轴O1为整体螺母“K”的千斤顶的构造原理示意图。
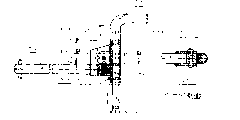
图1—II为采用本发明的“F螺母”和电机减速传动装置后的一种“电动型具有快、慢速升降功能的千斤顶”。
图1-III为在左、右铰链轴O1和O2上分别都设有“F螺母”的千斤顶示意图。
图2—I为“开合执行机构”为内弧式凸轮副和钣簧的实施例主视图。图中,螺杆4呈“M”向转,内、外牙齿处于啮合状态。
图2-II为图2-I中的A-A剖视图(之一)表示螺杆4作“M”向转动,两个半螺母的内螺纹正与螺杆螺纹相啮合工况图。
图2-III为图2-I中的A-A剖视图(之二),表示螺杆4作“N”反向转动,内、外螺纹分离的工况图。
图3-I为图2-I中的支承座1A的立体图。
图3-II为图2-I中的上、下两个半螺母2A、2A′的立体图。
图3-III为图2-I中的升降3 A的立体图。
图3-III为图2-I中的涨力钣簧14的立体图。
图4-I为“开合执行机构”是内弧凸轮和端面凸轮槽的实施例主视图。图中螺杆4呈“M”转向,内、外螺纹正处啮合工况。
图4-II为图4-I中的G-G向剖视图(之一),螺杆4作“M”向转动,内外螺纹处啮合工况。
图4-III为图4-I中的G-G向剖视图(之二),螺杆作“N”反转,内、外螺纹处于分离工况。
图4-III为图4-I中的上、下半螺母2B、2B′的立体图。
图5-I为“开合执行机构”是在半螺母上设置腰形端面凸轮槽的实施例主视图,图中螺杆4作“M”向转动,内、外螺纹正处于啮合工况图。
图5-II为图5-I的F-F向剖面图(之一),图中内外螺纹处于啮合状态。
图5-III为图5-1的F-F向剖面图(之二),图中内外螺纹正处于分离状态。
图6-I为“开合执行机构”是采用凸轮腰形槽设在升降套上,凸轮导销设在半螺母上的实施例主视图。图中内、外螺纹正处于分离状态。
图6-II为图6-I中的G-G向剖视图(之一)。
图6-III为图6-I中的H-H向剖视图。
图6-III为图6-I中的G-G向剖视图(之二),图为用压簧32代替图6-II中的“降程凸轮廓面”3.D.22后,内外螺纹处于分离状态工况图。
图7为“开合执行机构”是采用:凸轮廓面设在升降套园柱筒3E.1上,凸轮导销设在半螺母端头上的实施例主视图。螺杆4作“N”向反转,内、外螺纹处于分离的工况。
图8为“开合执行机构”是连杆式“曲柄滑块机构”的实施例图。本图为图5-I中的F-F向剖面图(之三),图中螺杆4呈“N”向反转,内、外螺纹正分离。
图9-I为开合执行机构是:外园径向凸轮和凸轮升降板凸轮副,铰链轴O1设在半螺母上的实施例主视图。
图9-II为半螺母2F的立体图。
图10-I为“开合执行机构”与图9-I相同,仅铰链轴O1设在支承座1G的实施例主视图。
图10-II为支承座1G的立体图。
图11为“开合执行机构”与图9-I相同,仅取消了支架1F后的实施例主视图。
图12-I与图11相同,仅加装防窜框架的实施例图。
图12-II为框架的立体图。
图13为“开合执行机构”是偏心凸轮套3H与框形孔共轭的凸轮副的实施例主视图。
图14-I为“开合执行机构”与图13相同,仅半周内螺母同时也设在偏心凸轮套内的实施例主视图。
图14-II为图14-I中的A-A向剖视(之一)。
图14-III为图14-I中的A-A向剖视图(之二)。
图15-I为半螺母开合装置的过载离合机构是端面摩擦锥式的实施例局部主视图。
图15-II为图15-I中A-A剖面图。
图16-I为半螺母开合装置的过载离合器机构是外摩擦涨环式的实施例局部主视图。
图16-II为图16-I中B-B剖面图(之一)——外摩擦涨环结构图。
图16-III为图16-I中B-B剖面(之二)——内摩擦涨环结构图。
图17-I为半螺母开合装置的过载离合机构是轴向导柱(或钢球)式的实施例局部主视图。
图17-II为半螺母开合装置的过载离合机构是径向滚珠(或导柱)式的实施例的局部主视图。
图18-I为半螺母开合装置的“快慢速操纵机构”是“棘爪插销式”锁定机构的主视图。
图18-II为图18-I中的A-A剖面图(之一)。
图18-II为图18-I中的A-A剖面图(之二)。
图19-I为图18-I的另一种变换,改为圈簧和叉式偏心手柄后的主视图。
图19-II为图19-I的K-K向剖面图。
图20为本发明“快速自动同步开合式半螺母装置F”的实用载体为台虎钳的实施例主视图。
图21-I为本发明千斤顶的摇把做成折迭式的实施例主视图。
图21-II本发明的摇把做成折迭伸缩式实施例主视图。
图2-I为本发明第一个实施例。其特征是采用1至多个半螺母,螺杆由支承座支承,螺杆的横截面上均匀地分布1个或多个半螺母,半螺母设置在支承座和升降套之间,半螺母配有自动升降的开合装置,升降套设有防止沿螺杆轴向移动的防窜装置。其结构为支承座设有:支承臂(1个或2个)、并相应地有支承孔(1个或2个)、支承体(包括与载体连接装置如绞链轴O1等)、与半螺母升降滑动导轨相配合的升降导向件及限位件。螺杆呈动配合状态穿过支承孔与半螺母和升降装置(如升降套)相配合(包括防轴向窜动装置)。半螺母如有两个或两个以上,它们相对螺杆中心对称布置,半螺母具有小于半周的内螺纹和作升降运动的导向滑动导轨,以及传递升降力执行件;控制半螺母自动同步开合动作的“半螺母自动开合机构”具有开合执行机构(如升降套和凸轮廓线),过载离合机构(如棘爪,圈簧等)和升程限位机构;保险机构;锁定机构,它使螺杆具有快慢速进退功能。
图2-I为本发明的“F螺母”,采用两瓣半螺母、开合执行机构是内弧凸轮和涨力钣簧作半螺母的开合执行机构的实施方案的主视图。
“该机构”由支承座1A、上、下两半螺母2A和2A′、涨力板簧14,升降套3A,棘爪7,圈簧6限位、挡销15、压板17、锁定机构5和螺杆4组成。因“F螺母”的实用载体是千斤顶,故支承座的连接方法是铰链轴耳1A.1(如图3-I)。螺杆4穿过支承孔1A.2和升降套内孔3A.1与半螺母和升降执行机构配合。两个半螺母的2 A和2A′的左侧约一半体积的外侧面2A.2和2A.3等与支承座的内侧导轨面1A.3、1A.4动配合,右端的那一半装在升降套3A的左端的大孔中,该孔是内弧式凸轮,其凸轮廓面是由对称的两段内弧凸轮升程廓面3A.2、3A.3和两段最小半径为Rmin的内弧3A.4以及另两段最大半径为Rmax的内圆弧3A.5组成。涨力板簧14装在上、下两个半螺母上的槽2A.4和2A′.4内(图3-II),强迫上、下半螺母向外分离,从而使得半螺母外弧最高点2A.5和2A′.5始终牢牢地压在升降套的内弧凸轮表面上,这内弧式凸轮廓面即为“F螺母”的“开合执行机构”,其工作原理显而易见,如升降套3A作“M”向(顺时针方向)转动,则与半螺母的端头最高点2A.5,2A′.5相接触的内弧式凸轮廓线将由最大半径的3A.5,经升程凸轮廓线3A.2而运动到最小半径的3A.4止,迫使半螺母2A和2A′向螺杆4中心方向作合牙运动(以下简称向心运动),直到内外螺纹的牙齿完全啮合(见图2-II),此时,限位挡销15刚好碰到挡块17。反之,同理,如升降套3A作“N”向(逆时针方向)转动,则半螺母2A、和2A′作“离心运动”,使内、外螺纹牙齿分开,如图2-III所示。
关于上述升降套3A作“M”向或“N”转动的扭力矩是来自螺杆4,经安装在升降套上的“自动同步过载离合机构”传递给升降套的。图2-I中的“过载离合机构”是由安装在升降套径向孔3A.7中的棘爪7(滑动配合)和圈簧6以及螺杆4上的键槽4.1组成。棘爪下端有两个斜面7.1,该斜面端头在圈簧6的压力推动下压向螺杆4的外园上或掉进螺杆的键槽4.1中,当螺杆4作“M”向转动时,则螺杆键槽4.1的侧边4.1.1就碰到棘爪斜面7.1,并推着棘爪7和升降套3A一同跟随升降套一同作“M”向转动,于是升降套3A上的“开合执行机构”将半螺母2A,2A′作″向心啮合运动″,直到升降套上的限位挡块17与支承座1A上的挡销15相碰而停止转动,此刻螺杆4仍作“M”向转动,则键槽侧边4.1.1作用在棘爪斜面7.1上的压力加大,直到这向上的轴向分力大于圈簧6加在棘爪上的向下的压力时,则棘爪的斜面7.1就被键槽4.1挤出,即过载后分离,而螺杆仍继续作″M″向转动,将汽车顶起。反之,螺杆作″N″向转动,则通过棘爪7同样把扭矩传递到升降套3A也随螺杆4作“N”向转动,再通过“开合执行机构”使半螺母作“离心运动”,迫使内外螺纹打开,(见图2-III)实现千斤顶快速下落。千斤顶下落时的速度,如果希望是慢速,则可在支承座1上安装锁定机构5,它由插销5.1、弹簧5.2、插销座5.3、销轴5.4和偏心手柄5.5组成,其中插销5.1前端为插销尖5.1.1,正好对准升降套3A上的锁定孔3A.8。锁定机构工作原理如下:当希望螺杆4有慢退、慢进功能(即千斤顶能慢升或慢降)时;首先操作手柄让螺杆4作“M”向转动,使内、外螺纹啮合,然后将“偏心手柄5.5的箭头放置成垂直(如图2-I所示),这时偏心手柄5.5处于短轴位置(即偏心手柄5.5的底面的5.5.2与弹簧座5.3前端面5.3.1相接触),此时插销5.1刚好插入锁定孔3.4内,升降套3被固定不能转动,从而使半螺母2的内螺纹与螺杆螺纹总保持在啮合状态,这就与传统的螺杆机构一样得以保持原有的慢进、慢退的功能;当希望螺杆具备快进、快退功能时,将偏心手柄5.5放至箭头呈水平的位置,这时偏心手柄5.5处于长轴位置(即偏心手柄5.5的侧面5.5.1与弹簧座5+3前端面5.3.1相接触),此时插销尖5.1.1退出升降套3的锁定孔3.4,此时升降套3在螺杆和棘爪带动下可作“N”向转动,则就能使半螺母2A和2A′与螺杆上的内外螺纹分离,从而使螺杆4具有快速越过空行程的功能,若应用载体是千斤顶,则就可该千斤顶实现快速升或降。
图4-I是本发明的″F螺母″的″开合执行机构″,它是分别由两套执行机构来完成的。其中负责半螺母2B和2B′自动合牙动作的“执行机构”与图2-I—样的,仍是升降套3B左端大孔上的内弧式凸轮廓面3B.2、3B.4、3B.5。而负责半螺母自动分开动作的“执行机构”则是由凸轮槽和凸轮导销组成的端面凸轮副来承担,该凸轮副的端面凸轮槽2B.2和2B′.2设置在半螺母2B和2B′的右端侧面上,升降执行凸轮廓面为2B.3和2B′.3,见图4-III;其凸轮导销16和16′设置在升降套3B的左端面3B.2上,其余构造与图2-I一样。工作过程:当螺杆4作″M″向转动,通过棘爪7把扭力矩传给升降套3B,也作“M”向转动,通过内弧式凸轮升程廓线3B.2的半径从大到小的变化,迫使半螺母2B、2B′作“向心合牙运动”,直到限位挡板17被挡为止,而螺杆4继续″M″向转动使千斤顶慢速上升(见图4-II)。反之当螺杆4作″N″转动(如图4-III),则升降套3B也作“N”向转动,装在升降套3B上的凸轮导销16和16′进入凸轮槽2B.2和2B′.2中与凸轮升程廓面2B.3和2B′.3相作用,使半螺母2B和2B′作“离心运动”,实现内外螺纹分离,使螺杆与螺母间可快速往返移动。其他与图2-I均一样。
图5-I所示的″开合执行机构″的特征是由腰形端面凸轮槽和凸轮导销组成的端面凸轮副。其腰形端面凸轮槽2C.2和2C′.2设在半螺母2C和2C′的右侧端面上,腰形凸轮槽的执行件是由升程凸轮廓线2C.4和降程凸轮廓线2C.3组成。凸轮导销16和16′设置在升降套3C的左端面3C.2上。腰形凸轮槽的两端头园弧面2C.7和2C.8是升程限位面。其余与图4-I相同。工作过程:螺杆4作“M”向转动并带动升降套3C和其上的导销16,16′也一同作″M″转动,通过端面半螺母上的降程凸轮廓面2C.4和2C′.4的作用,迫使半螺母2C和2C′作″向心合牙运动″直到导销16和16′与腰形槽端头2C.7相阻,内、外螺纹牙齿全啮合为止(如图5-II)。反之,螺杆4作″N"向转动,通过升程凸轮廓面2C.3和2C′.3的作用迫使半螺母2C和2C′作离心运动,使内、外螺纹分离。其余与图2-I一样。
图6-I所示的“开合执行机构”的特征为腰形凸轮槽3D.2和3D′.2设在升降套3D的凸轮盘3D.1上,其凸轮槽的“执行”件是由升程凸轮廓线3D.2.1和降程凸轮廓线3D.2.2组成;其凸轮导销16、16′设在半螺母2D和2D′上。半螺母2D和2D′在支承座1D的框形(或燕尾形等)的升降导轨中作升降开合运动,升降套3D的轴向窜动的限制是由凸轮导销16、16′的凸台端面16、1挡住凸轮盘3D.1的右侧面3D.4来实现的,此外,升降套3D的轴向窜动的限制方案也可取消上述凸轮导销的凸台16.1,然后在升降凸轮盘3D.1的右侧端面3D.4上安装一个带园柱凸沿的大垫圈,其园柱凸沿与支承座1D相固定连接(如焊接等)。因本图6-I和图5-I的“开合执行机构”都是腰形端面凸轮槽和凸轮导销,(仅是这两者的相对安装位置一个在升降套上,另一个在半螺母上)故两者动作过程和工作原理完全一样,故不再论述。
图6-IV的“开合执行机构”是在图6-II的基础上作了如下改造,首先把图6-II中的腰形凸轮槽3D.2中的降程凸轮廓线3D.2.2取消,只保留升程凸轮廓线3D.2.1,另再加上压力弹簧32而组成了两套“执行机构”:一套是完成半螺母2D和2D′自动分开动作的″执行机构″,这与上述的图6-II中基本相同。如仍由凸轮盘3D.1上的凸轮升降廓线3D.2.1与半螺母2D上的凸轮导销16和16′组成的凸轮副来实现,(当然也可互换位置,如图5—I一样,把导销16改设在升降套3D上,把凸轮廓线3D.2.1改设到半螺母上);另一套是完成半螺母2D和2D′的“向心合牙运动”的“执行机构”,即是压簧32直接压在半螺母2D和2D′的最外端头2D.1和2D′.1上。其余与图6-I和图6-II一致。
图7的“开合执行机构”是在图2-I的基础上改进的,其特征是在升降套3E.1的内、外园柱体上设有凸轮廓面3E.1.2和3E.1.1与凸轮共轭导销18、19组成的径向凸轮副来实现的,其凸轮共轭导销18、19安装在半螺母端头2E.1和2E′.1的销柱16和16′上,其他结构与图2-I相同。
图8中的“开合执行机构”是由曲柄滑块机构来实现的。曲柄20有两个铰链轴孔O2和O3,铰链轴孔O2与半螺母2F相连接,O3与升降套3F相连接。其他结构与图2-I相似。工作时,当升降套3F作“N”向转动,则铰链轴O3也一同作“N”向转动,于是曲柄倾角α变大,于是曲柄的铰链轴O2和O2′作“离心运动”,把半螺母2F和2F′分离,直到曲柄碰到限位面2F.1为止。反之当升降套3F随螺杆4作“M”向转动时,则曲柄铰链轴O2和O2′将带动半螺母2F和2F′作“向心合牙运动”。
图9-I和9-II的“开合执行机构”是由半螺母2F外周面上的凸轮廓面(包括升程廓线2F.2和降程廓线2F.3)和升降套3F上的升降板3F.1组成的凸轮副来实现的。半螺母2F有小于半周的内螺纹2F.6、大于螺杆外径的半光孔2F.7、前后两侧有两个与载体(千斤顶)相连接的铰链轴2F.7、外周面上有凸轮升程廓面2F.2和降程廓面2F.3。螺杆4依次穿过支架1F的左端孔1F.1,半螺母的光孔2F.7,升降套孔3F.3和支架右端孔1F.2。当“执行机构”的升降板3F.1转到最上位置时,它正好呈滑配合状态,垫塞在半螺母2F的外周面的上顶平面2F.9和支架1F的内腔上底平面1F.3之间。上述“执行机构”也可作下列三种简单的等效变换,如(1)将上述的原安设在半螺母2F外周面的前后两侧的与载体(千斤顶)相连接的铰链轴2F.7,也可改为安设在支架1F的左侧壁的前后两侧面上,这样这支架1F就变成带铰链轴的支承座1G,如图10-I和10-II所示,即在支承座1G的左端壁的前后侧面1G.8、1G.9上安设上铰链轴1G.7和1G.7′。这样去掉铰链轴2F.7之后的半螺母即变成无铰链轴的半螺母2G,其余如升降套3G和3F等都完全一样的,包括在升降套上都安装有棘爪7,在支架上都安装锁定机构5F和5G等。
(2)图9-I中可将原支架1F取消,只保留带铰链轴O1的半螺母2F和升降套3F,其余主要构造仍一样,就变成另一种新的“执行机构”(如图II所示),即半螺母为2G,升降套为3G,为防轴向窜动,在升降套的升降板3G.1上设有挡销12,相应地在半螺母2G上切出深槽2G.10与挡销12相配合。
(3)同样也是将图9-I中原支架1F取消(其余一样)就变成另一种新的“执行机构”,其半螺母为2F,升降套为3F,为防轴向窜动,增设防窜框架33,架上有两个耳孔33.1和33.2分别套在半螺母2F前后两侧面上的铰链轴2F.7上。
关于图9-I中的“开合执行机构”的工作原理如下:当螺杆4通过棘爪7带动升降套3F和其上的升降板3F.1一起作“M”向转动时,这升降板3F.1就围绕着半螺母2F的外周面上的升程凸轮廓线2F.2和降程凸轮廓线2F.3作行星运动,因这些凸轮廓线距内螺纹2F.6的中心的尺寸是变化的,如2F.2凸轮廓线到内螺纹2F.6的中心的尺寸最大,2F.3到中心尺寸就最小。所以升降套内孔3F.3和与之滑动配合的螺杆4的中心到半螺母2F的内螺纹2F.6的中心的距离也随着升降板3F.1作“M”向行星式转动而变小,迫使螺杆上的外螺纹4.3与半螺母上的内螺纹2F.6相啮合。相反,螺杆4带动升降套3 F作“N”转动,则内外螺纹就分开。此外支架1F的前后宽度正好与半螺母的左部的前后侧面2F.11和2F.12之间的宽度相等,正好夹在千斤顶连杆10.1,10.2片之间起升降导轨作用,故螺杆4只能在连杆片之间作上、下升降运动。
图13所示的“开合执行机构”是由偏心凸轮套3H和半螺母支承座1H的框形长方孔的上、下两平面1H.4和1H.3组成的偏心凸轮运动副来实现的。半螺母支架1H呈框架形、框架中间有长方孔,该孔的上、下平面1H.4和1H.3与偏心凸轮3H的偏心外园3H.2表面呈滑动配合;框架左侧壁1H.7和右侧壁1H.8上分别设有小于半周的内螺纹1H、6和1H.5和大于螺杆4外径的半周光孔1H.1和1H.2。螺杆4依次穿过左壁光孔1H.1、偏心凸轮内孔3H.1和右壁光孔1H.2。此外,框架左侧壁的前、后侧设有铰链轴O1与实用载体的千斤顶体10.1和10.2相连接。
本“偏心凸轮套”3H的壁厚,因偏心园关系造成一边厚,一边簿,所以该套在螺杆4的带动下作“M”向转动时,则偏心套3H的最厚处,正好转到最下位与支承座的下平面1H.3相接触,螺杆4的中心被抬高,使其内、外螺纹啮合。反之螺杆4带偏心套3H作“N”向转动,这偏心套3H的最厚处转到支承座1H的最上平面1H.4处,则内外螺纹就分开。
图14-I所示的″开合执行机构″是由半螺母2J的外周面偏心凸轮廓线2J.1与支承架1J中的框形长方孔的上、下两平面1J、1和1J.2组成的凸轮运动副来实现的。
半螺母2J的外周面偏心凸轮廓面2J.1实际是一个以O3为园心的外园柱表面,在半螺母2J体内有两个偏心孔,其孔的中心分别为:O2和O4,它们相距园心O3的偏心距都等于e,(e稍大于螺纹牙齿高度),中心为O4的偏心孔是一个直径大于螺杆4外径的半光孔2J.3;中心为O3的偏心孔是一个小于半周的内螺纹2J.4,在半螺母2J上设有两个升程限位销35、36和一个径向孔2J.5,内孔配有棘爪34,环形压簧6压着棘爪34,使棘爪端头34.1的锥体压在螺杆4的外园或键槽4.1中。
支承座1J呈方框形,框孔中配有半螺母2J,螺杆依次穿过支承座1J的左框支承孔1J.3、半螺母孔和右框支承孔1J.4。在左框臂1J.6的前、后侧安设有铰链轴1J.5(轴心为O1)、与实用载体(千斤顶)相连接。
为改善合牙性能其半螺母2J的外周面上的凸轮廓面2J.1的形状除了园柱体外,还可根据需要设计成其他凸轮曲线。
本机构原理显而易见,如螺杆4带动半螺母2J作″M"转动,偏心外园2J.1上距内螺纹中心O2最远点转到支承架的内腔下平面1J.2处,则内螺纹中心O2与螺杆4的中心O5重合,使内外螺纹啮合,此时限位销35与下平面1J.2相碰而止,如图14-II所示。反之,螺杆4作″N″向反转,带动半螺母2J也作″N"向转动,如图14-II所示。当内螺纹中心O2距偏心外园2J.1最近距离的园弧部位与下平面1J.2接触,则内螺纹中心O2远离螺杆中心O5,实现内外螺纹分离,此时限位销36与下平面1J.2相碰而止。
综上所述,关于本发明的“快速自动同步开合式半螺母装置F″的螺杆、螺母相对开合执行机构的实施方案,等效机构是很多的,如常应用在车床三爪自动定心卡盘上的阿基米德螺线端面螺纹就可代替图4—I中的端面凸轮机构,再如半螺母的个数,既可1个或2个,也可两个以上,因这些都在本发明范畴之内,故不一一例举。
关于本发明“快速自动同步开合式半螺母装置F”的″半螺母自动开合机构”中的“自动同步过载离合机构”除了图2—I中所述棘爪7和圈簧6组成的“过载离合机构”之外,其他能起过载离合作用的等效“过载离合机构”,有各式各样,从形式讲,有单向式、双向式、超越式,以及电磁、液、气动等各种方式、从过载离合元件讲、可以用棘爪(单向、双向式)、牙嵌、钢球、导园柱,摩擦锥(盘、片、块、园、垫)以及各种弹性元件(如各种弹簧、弹性涨圈、弹性涨环、涨套等),总之一切过载离合器均为本发明的过载离合机构的等效机构,下面列举几个以图2—I中所示的过载离合机构的等效过载离合机构的实施例。图15-I、图15—II为摩擦环(或摩擦锥)的摩擦式过载离合机构,其工作原理为摩擦环(锥)21装在升降套3A内,并滑动地套在螺杆4的外园上,摩擦面(锥)21.1在压簧22的作用下,紧紧压在升降套3A的右摩擦面(锥)3A.10上,摩擦环(锥)21通过导键23与螺杆4连接,螺杆4转动时,其驱动力矩通过键槽4.1、导键23,摩擦环摩擦面(锥)21.1传递给升降套3A,并带着它一同转动,直到升降套3A碰到升程限位装置而停止转动,但螺杆将继续转动,这摩擦副就过载而打滑,但不妨碍螺杆继续转动,以完成螺杆螺母副的预定传动任务。上述摩擦环(锥)的接触面21.1和3A.10也可改为牙嵌式互相作用,在压簧22作用下,如传递力矩过载,则牙嵌间就打滑,当然压簧22的压缩变形量要大于牙嵌的高度。
图16-I和16—II为外园摩擦涨环式过载离合机构。本例仅是用图16-I中的外园摩擦涨环25代替图9中的摩擦环21和弹簧22,仍用挡圈24挡住涨环25,在涨环25的园柱体上开一轴向开口槽25.1,该涨环25在自由状态时,其外园25.2的直径大于升降套3A的内孔3A.11的内径,装配时将开口25.1略收拢,装入内孔3A.11中再松开,这样涨环25的外园25.2就依靠弹性涨贴在升降套3A的内孔3A.11的内孔壁上,并产生一定的摩擦力,该涨环的内径比螺杆外径略大,并通过导键23与螺杆4连接,其工作过程与图9-I中的摩擦环式相同,仅将过载打滑的摩擦面从端面上(或锥面上)改到涨环的外园上而已。
图16—III为内孔摩擦涨环式过载离合机构,工作原理:基本与图16-II相同。仅是内孔摩擦式涨环26也有轴向开口槽26.1,在自由状态下其内孔26.2的内径比螺杆4的外径4.9小些,装配后,其内孔在弹性作用下,抱住螺杆4的外园柱上,并产生一定摩擦力(螺杆4上无键槽),内涨环26的外径比升降套3A的内孔内径小,并通过传力销27,把螺杆的驱动力矩传递给升降套3A。工作过程与图16-II相同,仅是过载打滑摩擦面,直接由螺杆4的外园与涨环内孔之间的摩擦面来承担。
图17-I为轴向分布导柱(或钢球)式过载离合机构,工作原理:空套在螺杆4上滑套28的左端面上,有径向小孔,孔内装小压簧29和导柱30(或钢球),与设置在升降套3A右端面上的阻力小锥坑3A.12相啮合,工作过程与图15—I也基本相同,仅是将图15—I中的纯端面摩擦式,改成图17—I中的小锥坑与导柱(或钢球)阻力式。图17—II中所示的机构,为图17-I中所示机构的等效机构,仅将图17-I中的轴向分布的导柱孔改为图17-II中的径向分布即可,图中3A.13为轴向阻力槽,工作原理相同。总之还有许多种由各种过载元件组合成的过载离合机构,均为本发明中的过载离合机构的等效机构。
本发明“快速自动同步开合式半螺母装置F”中的″快、慢速操纵控制机″的结构形式除图2—I中的插销锁定机构5之外,图19-I是另一种“棘爪式锁定机构”5′。其结构基本与插销式锁定机构5一样,仅是将原园柱形插销5.1的插销尖5.1.1改为锥面棘爪式插销尖5′.1.1,它可在偏心手柄5′.5的操纵和控制下插在螺杆4的键槽4.1中,或者从键槽4.1中拔出。其插销座5′.2固定在升降套3A上。为方便操作,可将片式箭头形偏心手柄5′.5改成双叉式偏心手柄36,它与棘爪30的端头相配。为安装圈簧6,则在升降套3A上切槽子3A.10,在棘爪30上切槽子30.3。
本棘爪锁定机构工作原理:当偏心5′.5放置成垂直位置时,如图18-II,棘爪在压簧5′.2作用下可插进键槽4.1中,其作用与图2-I的“锁定机构”5一样,如当螵杆4作“M ”转动,则可通过键槽4.1和棘爪锥面5′.1.2带动升降套3A作“M”转动,并通过开合执行机构使半螺母2A、2A′与螺杆螺纹处于啮合状态。如此刻把偏心手柄5′.5放成水平,如图18-,则棘爪端头5.1.1被抬起离开螺杆4的键槽4.1,这样,螺杆4无论作″M″或“N”向转动,都不能使升降套3A跟着螺杆4转动,从而保护了半螺母与螺杆的螺纹牙齿仍处在啮合的状态,这与传统的螺杆螺母传动副就毫无区别,即实现了慢进、慢退的功能,如载体是千斤顶,则此刻可实现了使千斤顶具有了慢升、或慢落的功能。
图1-II所述“快速升降式千斤顶”,其螺杆4左端头穿过左铰链轴O2的中心支承孔与输入(驱动)扭矩的传动装置相连接,这些传动装置除了人工用手柄直接转动螺杆4(″直接手动型″)和人工用手柄转动变速箱再带动螺杆4的“减速手动型”之外,其特征在于可用汽车上自身的电源,使用电动机10.8带动减速机10.9来驱动,螺杆4的″电动型″或既可手动又能电动的″手电两用型”。
关于图1—I中的手柄10.7由手柄体10.7.5和摇把10.7.1、10.7.2组成,为减少体积、便于收藏,可把它们做成折迭式或伸缩式。图21-I的特征为:操纵手柄10.7的摇把10.7.1、10.7.2可分别以铰链轴10.7.3和10.7.4为轴心快速折迭,弹簧10.7.6和钢球10.7.7完成定位。图21—II为将摇把10.7装入空心的摇把10.7.1的内孔10.7.8中,作伸缩运动的机构,10.7.9为定位圈簧,必要时手柄体10.7.5可制成折迭式或伸缩式。
总结以上,本发明虽是一种能快、慢速升降的千斤顶,但最本质的发明核心仍是“快速自动同步开合式半螺母装置F”,该机构的应用载体十分广泛,如果应用载体是千斤顶,则该千斤顶实施例即为前述的本发明名称。同样如应用载体是台虎钳,则发明名称即为“一种能快、慢速开合的台虎钳”等等。举例,图20就是把图2—I所示的“快速自动同步开合式半螺母装置F″的原实用载体“千斤顶”,改为实用载体是“台虎钳”的实施例,对比这两实施例可知。改装的方法其实十分简单,只要改变与各实用载体与“F螺母”的连接方法即可,如将图2-I中的支承座1A上的铰链轴O1去掉,改为用支承座1A′上的底平面1A′1和垂直平面1A′.2直接与台钳固定钳体“a”上的相应定位平面a1和a2相接触,并用螺钉“b”相紧固,此外,螺杆4与台钳的活动钳体″c″相联即可,其他不用改动。总之本发明的″快速自动同步开合式半螺母装置F″的应用范围即“应用载体”除千斤顶之外,还可用在:台虎钳、机床平口钳、管子钳、机床滑台、车床尾架、建筑用可调高度手脚架等等以及其他一切需要用螺杆、螺母传动副作传动装置的地方而组合成新的机构,均属本发明之范畴,(仅需采用一些显而易见的方法,改变一下与上述这些“实用载体”的连接方案即可)。
Claims (7)
1.一种快速升降式千斤顶有:螺杆4、底座10.5、托顶10.6、举升连杆机构10.1~4、左铰链轴O1、右铰链轴O2组成,其特征:(1)在于还有在左、右铰链轴O2和O1上设有“快速自动同步开合式半螺母装置F”(以下简称“F螺母”);(2)螺杆4与左、右铰链轴的连接方法有两种型式,一种是螺杆4左部端头穿过左铰链轴O2中心孔与输入转动力矩的传动装置相连接(如手柄接头、变速箱、电机等),而螺杆4右部外园上有螺纹,与设在右铰轴O1上的“F螺母”中相应的半螺母相配合;另一种是:螺杆4的左部外园上设有左(或右)旋螺纹,与设在左铰链轴O2上的“F螺母”中相应的半螺母相配合,而螺杆4的右部外园上设有右(或左)旋螺纹,与设在右铰轴O1上的“F螺母”中相应的半螺母相配合,另其转动螺杆4的传动装置可设在螺杆的一端;(3)“F螺母”由:(1)支承座,(2)1个或多个半螺母,(3)半螺母自动同步开合(升降)机构组成。螺杆上有螺纹穿过“F螺母”中的支承座的支承孔与半螺母及半螺母自动同步开合机构相配合。“F螺母”这三部分特点:(1)支承座,其上设有:与应用载体(如千斤顶)相连接的构件(如铰链轴)、与螺杆相连接的构件(如支承孔)、与半螺母相配合的构件(如升降导轨)、还安有限位机构、快慢速变换机构,(2)半螺母,其数量为1个或多个,其上具有不大于半周的内螺纹、升降滑动导轨、产生并传递升降力的外周面和执行件(如凸轮廓线、面凸轮导销),有时半螺母上还设有与实用载体相连接配合的构件(如铰链轴、支承定位面),(3)“半螺母自动同步开合机构”具有:自动同步过载离合机构、螺杆半螺母相对开合执行机构、开合行程限位机构、起升后防止螺杆再转动的保险机构,有时还设有快、慢交换操纵机构(使千斤顶下降时也有慢速功能);
2.如权利要求1所述的快速升降式千斤顶,其特征在于″自动开合式半螺母装置”的“半螺母自动开合(升降)机构”中的“自动同步过载离合机构”可为下述结构之一:
(1)在升降套3A上设有径向棘爪孔3A.7,棘爪孔3A.7内设有棘爪7,棘爪7上配合有环形拉簧6,同时在螺杆4上设有轴向键槽4.1,使之与棘爪6相配合;
(2)由升降套3A,摩擦环(锥)21、导键23、压簧22、挡圈24构成,摩擦环(锥)21装在升降套3A内,并通过导键23与螺杆4连结,所述的螺杆4上同时设有轴向键槽4.1,使之与导键23相配合;或将摩擦锥(环)的接触面21.1和3A.10改成牙嵌式,加大压簧22变形量留出略大于牙嵌高度的左右移动空间;
(3)由弹性涨环26、传力销27、升降套34、挡圈24组成,弹性涨环26有开口26.1,在自由状态下,其内孔直径比螺杆4的外径小,安装在螺杆与升降套之间,通过传力销27与升降套连结;
(4)由弹性涨环25、导键23、升降套34、挡圈24组成,弹性涨环25上有开口25.1,在自由状态下,其涨环外园25.2的外径尺寸比升降套的内孔3A.11孔径大,安装在螺杆与升降套之间,螺杆上设有轴向键槽28,通过导键4.1与螺杆连结;
(5)由滑套28、导键23、弹簧29、导柱30、升降套3A组成,在升降套3A的右端面上有一个(或数个)阻力小锥坑3A.12,导柱30和弹簧29装在滑套3A左端面轴向小孔中,导柱30与阻力小锥坑3A.12配合,滑套28通过导键23与螺杆4连结,螺杆4上设有轴向键槽4.1与导键23配合;导柱30可用钢球代替;
(6)由滑套28、导键23、弹簧29、园导柱(或钢球)30、升降套3A和数个小阻力槽3A.13组成,钢球30和弹簧29装在滑套28的径向小孔中,钢球30与阻力槽3A.13相配合,滑套28通过导键23与螺杆连结,螺杆4上设有轴向键槽4.1与导键23相配合;
3.如权利要求1或2所述的快速升降式千斤顶,其特征在于“自动开合式半螺母装置”的“半螺母自动开合(升降)机构”中的螺杆、螺母相对开合执行机构(以下简称″开合执行机构″)可为下述结构之一:
“开合执行机构”之一:
螺杆4穿过支承座1A的支承孔1A.2和升降套3A的内孔3A.1,有两个可相对螺杆4作相对开、合(升降)运动的半螺母2A和2A′,它们的左侧约一半体积的外侧面2A.2、2A′.2和2A.3、2A′.3与支承座1A的滑动导轨1A.3、1A.4动配合,右侧的那一半体积装在升降套3A的左端的大孔中,其“开合执行机构”是该大孔上的内弧式凸轮,其凸轮廓面是由对称的两段内弧凸轮升程廓面3A.2、3A.3和两段最小半径为Rmin的内弧3A.4以及另两段最大半径为Rmax的内圆弧3A.5组成。涨力板簧14装在上、下两个半螺母上的槽2A.4和2A′.4内,强迫上下半螺母2A′、2A向外分离,从而使得外弧最高点2A.5和2A′.5始终牢牢地压在升降套的内弧凸轮表面上,其压板17和挡销15组成半螺母的开行程的限位机构;
“开合执行机构”之二:
本“开合执行机构”是上述“执行机构”结构之一的改进,仅将半螺母自动分开和自动合牙的动作分别由两套“执行机构”来完成,其余均相同,其中负责半螺母自动合牙动作的“执行机构”仍与上述结构之一相同,即仍是升降套3B左端大孔上的内孤式凸轮廓面3B.2、3B.4、3B.5,而负责半螺母自动分开动作的“执行机构”则是由凸轮槽和凸轮导销组成的端面凸轮副来承担,该凸轮副的端面凸轮槽2B.2和2B′.2设置在半螺母2B和2B′的右端侧面上,升降执行凸轮廓面为2B.3和2B′.3;其凸轮导销16和16′设置在升降套3B的左端面3B.2上;
“开合执行机构”之三:
本“执行机构”是由腰形端面凸轮槽和凸轮导销组成的端面凸轮副,其特征是腰形端面凸轮槽2C.2和2C′.2设在半螺母2C和2C′的右侧端面上,其腰形凸轮槽的执行件是由升程凸轮廓线2C.4和降程凸轮廓线2C.3组成,凸轮导销16和16′设置在升降套3C的左端面3C.2上,腰形凸轮槽的两端头园弧面2C.7和2C.8是升程限位面;
“开合执行机构”之四:
本机构与上述“机构”之三的原理是一样的,其特征是腰形凸轮槽3D.2和3D′.2设在升降套3D的凸轮盘3D.1上,其凸轮槽的″执行″件是由升程凸轮廓线3D.2.1和降程凸轮廓线3D.2.2组成;其凸轮导销16、16′设在半螺母2D和2D′上。半螺母2D和2D′在支承座1D的框形(或燕尾形等)的升降导轨中作升降开合运动,升降套3D的轴向窜动的限制是由凸轮导销16、16′的凸台端面16.1挡住凸轮盘3D.1的右侧面3D.4来实现的,此外,升降套3D的轴向窜动的限制方案也可取消上述凸轮导销的凸台16.1,然后在升降凸轮盘3D.1的右侧端面3D.4上安装一个带园柱凸沿的大垫圈,其园柱凸沿与支承座1D相固定连接(如焊接等)。
“开合执行机构”之五:
本“机构”是将前述“机构”之四的腰形凸轮槽中的降程凸轮廓线3D.2.2取消,只保留升程凸轮廓线3D.2.1,另再加上压力弹簧32而组成了两套“执行机构”:一套是完成半螺母2D和2D′自动分开动作的“执行机构”,这与上述“机构”之四是一样的,仍由凸盘3D.1上的凸轮升程廓线3D.2.1与半螺母2D上的凸轮导销16和16′组成的凸轮副来实现(其凸轮廓线和凸轮导销设置在半螺母上,还是设置在升降套上,是可以互换的),另一套“执行机构”即是压弹32直接压在半螺母2D和2D′的最外端头上以完成半螺母的合牙动作;
“开合执行机构”之六:
本“执行机构”是在“执行机构”之一基础上改进的,其特征是将升降套3E.1的内、外园柱体上设有凸轮廓面3E.1.2和3E.1.1与凸轮共轭销18、19组成的径向凸轮副来实现的,其凸轮共轭销18、19安装在半螺母端头2E.1和2E′.1的销柱16和16′上,其他结构与“执行机构”之一相同;
“开合执行机构”之七:
本“执行机构”是由曲柄滑块机构来实现的。曲柄20有两个铰链轴孔O2和O3,铰链轴孔O2与半螺母2F相连接,O3与升降套3F相联结。其他结构与“执行机构”之一相似;
“开合执行机构”之八:
本“机构”是由半螺母2F外周面上的凸轮廓面(包括升程廓线2F、2和降程廓线2F、3)和升降套3F上的升降板3F.1组成的凸轮副来实现的。半螺母2F有小于半周的内螺母2F.6、大于螺杆外经的半光孔2F.7、前后两侧有两个与载体(千斤顶)相连接的铰链轴2F、7、外周面上有凸轮升程廓面2F.2和凸轮降程廓面2F.3。螺杆4依次穿过支架1F的左端孔1F.1、半螺母的光孔2F.7、升降套孔3F.3和支架右端孔1F.2。当″执行机构″的升降板3F、1转到最上位置时,它正好呈滑配合状态垫塞在半螺母2F的外周面的上顶平面2F.9和支架1F的内腔上底平面1F.3之间。上述“执行机构”也可作下列三种简单的等效变换,如(1)将上述的原安设在半螺母2F外周面的前后两侧的与载体(千斤顶)相连接的铰链轴2F.7,也可改为安设在支架1F的左侧壁的前后两侧面上,这样支架1F就变成铰链轴的支承座1G,即在支承座1G的左端壁的前后侧面1G8、1G9上安设上铰链轴1G、7和1G.7′,去掉铰链轴2F.7之后的半螺母即变成无铰链轴的半螺母2G,其余如升降套3G和3F等都完全一样,包括在升降套上都安装有棘棘爪7,在支架上都安装锁定机构5F和5G等都一;。
(2)可将原支架1F取消,只保留带铰链轴O1的半螺母2F和升降套3F,其余主要构造仍一样,就变成另一种新的″执行机构″,即半螺母为2G,升降套为3G,为防轴向窜动,在升降套的升降板3G.1上设有挡销12,相应地在半螺母2G上切出深槽2G.10与挡销12相配合;
(3)同样也是将原支架1F取消,其余主要构造仍一样,而变成另一种新的“执行机构”,其半螺母为2F,升降套为3F,为防止轴向窜动,增设防窜框架33,其上的两个耳孔:33.1和33.2分别套在半螺母2F的前后两侧面上的铰链轴2F.7上;
“开合执行机构”之九:
本“执行机构”是由偏心凸轮3H和半螺母支承座1H的框形长方孔的上、下两平面1H.4和1H.3组成的偏心凸轮运动副来实现的,半螺母支架1H呈框架形,框架中间有长方孔,该孔的上、下平面1H.4和1H.3与偏心凸轮3H的外园3H.2呈滑动配合;在框架左侧壁1H.7和右侧壁1H.8上分别设有小于半周的内螺纹1H.6和1H.5和大于螺杆4外径的半周光孔1H.1和1H.2,螺杆4依次穿过左壁光孔1H.1、偏心凸轮内孔3H.1和右壁光孔1H.2,此外,框架左侧壁的前后侧设有铰链轴O1与实用载体的千斤顶体10.1和10.2相连接;
“开合执行机构”之十:
本“执行机构”是由半螺母2J的外周面偏心凸轮廓线2J.1与支承架1J中的框形长方孔的上、下两平面1J.1和1J.2组成的凸轮运动副来实现的,
半螺母2J的外周面上的偏心凸轮廓面2J.1实际是一个以O3为园心的外园柱表面,在半螺母2J体内有两个偏心孔,其孔的中心分别为:O2和O4,它们相距园心O3的偏心距都等于e,(e稍大于螺纹牙齿高度),关于中心为O4的偏心孔是一个直径大于螺杆4外径的半光孔2J.3;中心为O3的偏心孔是一个小于半周的内螺纹2J.4,在半螺母2J上还设有两个升程限位销35、36和径向孔2J.5,内孔配有棘爪34,环形压簧6压着棘爪34,迫使棘爪端头34.1的锥体压在螺杆4的外园或键槽4.1中,支承座1J呈方框形,框孔中配有半螺母2J,螺杆依次穿过支承座1J的左框支承孔1J、3、半螺母孔和右框支承孔1J.4 ,在左框臂1J.6前、后侧安设有铰链轴1J.5(轴心为O1)与实用载体(千斤顶)相连接;
为改善合牙性能其半螺母2J的外周面上的凸轮廓面2J.1的形状除了园柱体之外,还可根据需要设计成其他凸轮曲线;
4.如权利要求3所述的快速升降千斤顶,其特征在于″自动开合式半螺母装置″的半螺母自动开合机构中的″快慢速操纵控制机构”可为下述结构之一:
(1)插销锁定机构5:由插销5.1、弹簧5.2、插销座5.3、轴销5.4和偏心手柄5.5组成,插销5.1前端为园柱形插销尖5.1.1,它可插入升降套3A(或3G)上的锁定孔3A.8中,关于插销尖5.1.1是否插入锁定孔3A.8中,或从锁定孔3A.8中拔出,只要控制操作偏心手柄5.5的箭头方向是垂直(或水平)即可。其插销座5安装在支承座1A上;
(2)棘爪式插销机构5′:其结构基本与插销式锁定机构5一样,仅是将原园柱形插销5.1的插销尖5.1.1改为锥面棘爪式插销尖5′.1.1,它可在偏心手柄5′.5的操纵和控制下插在螺杆4的键槽4.1中,或者从键槽4.1中拔出,其插销座5′.2固定在升降套3A上,为方便操作可将片式箭头形偏心手柄5′.5改成双叉式偏心手柄36,它与棘爪30的端头相配,为安装弹簧6,相应地在升降套3A上切槽子3A.10,在棘爪30上切槽子30.3,同样,只要操作手柄34的方位(如垂直或水平),则可使棘爪的爪部30.2从螺杆4的键槽4.1中拔出或放入键槽4.1中;
5.如权利要求3所述快速升降式千斤顶,其螺杆4左端头穿过左铰链O2的中心支承孔与输入(驱动)扭矩的传动装置相连接,这些传动装置除了人工用手柄直接转动螺杆4“直接手动型”和人工用手柄转动变速箱再带动螺杆4的“减速手动型”之外,其特征在于可用汽车上自身的电源,使用电动机10.8带动减速机10.9来驱动螺杆4的″电动型”或即可手动又能电动的“手电两用型”;
6.权利要求3所述的快速升降式千斤顶,其特征在于″自动开合式半螺母装置”的应用范围即“应用载体”除千斤顶之外,还可用在:台虎钳、机床平口钳、夹管子钳、机床滑台、车床尾架、建筑用可调高度手脚架等等,以及其他一切需要用螺杆、螺母传动副作传动装置的地方而组合成新的机构,均属本发明之范畴,(仅需采用一些显而易见的方法,改变一下与上述这些“实用载体”与本发明的“自动开合式半螺母装置”的连接方法即可);
7.如权利要求3所述的快速升降千斤顶,其特征在于操作手柄10.7的摇把10.7.1和10.7.2可分别以铰链轴10.7.3和10.7.4为轴心快速折迭,以减少体积便以收芷,弹簧10.7.6和定位钢球10.7.7完成定位,或者把摇把10.7.1制成空心并可绕铰链轴10.7.3折迭,另将摇把10.7.2装入空心的摇把10.7.1的内孔10.7.8中,作伸缩运动的机构,必要时手柄体10.7.5可制成折迭或伸缩式。
Priority Applications (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN94114934A CN1117018A (zh) | 1994-08-18 | 1994-08-18 | 快速升降式千斤顶 |
| AU32516/95A AU704054B2 (en) | 1994-08-18 | 1995-08-18 | Quickly movable elastically engaging screw-and-nut mechanism |
| EP95928941A EP0774599B1 (en) | 1994-08-18 | 1995-08-18 | Quickly movable elastically engaging screw-and-nut mechanism |
| PL95318678A PL179442B1 (pl) | 1994-08-18 | 1995-08-18 | Szybkonastawiany elastycznie sprzegany mechanizm srubowy PL PL |
| BR9509067A BR9509067A (pt) | 1994-08-18 | 1995-08-18 | Mecanismo de parafuso e porca de engate elástico |
| PCT/CN1995/000068 WO1996006292A1 (fr) | 1994-08-18 | 1995-08-18 | Mecanisme a ecrous et vis a prise elastique et deplacement rapide |
| JP1996507682A JP3510895B6 (ja) | 1994-08-18 | 1995-08-18 | 高速動弾性係合式ねじ・ナット機構 |
| CA002198244A CA2198244C (en) | 1994-08-18 | 1995-08-18 | Quickly movable elastically engaging screw-and-nut mechanism |
| US08/801,216 US5970812A (en) | 1994-08-18 | 1997-02-18 | Quickly movable elastically engaging screw-and-nut mechanism |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 94218458 CN2238823Y (zh) | 1994-08-18 | 1994-08-18 | 快速升降式千斤顶 |
| CN94114934A CN1117018A (zh) | 1994-08-18 | 1994-08-18 | 快速升降式千斤顶 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN1117018A true CN1117018A (zh) | 1996-02-21 |
Family
ID=25743501
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN94114934A Pending CN1117018A (zh) | 1994-08-18 | 1994-08-18 | 快速升降式千斤顶 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US5970812A (zh) |
| EP (1) | EP0774599B1 (zh) |
| CN (1) | CN1117018A (zh) |
| AU (1) | AU704054B2 (zh) |
| BR (1) | BR9509067A (zh) |
| CA (1) | CA2198244C (zh) |
| PL (1) | PL179442B1 (zh) |
| WO (1) | WO1996006292A1 (zh) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101966970A (zh) * | 2009-07-08 | 2011-02-09 | 信孚产业股份有限公司 | 剪式千斤顶 |
| CN105485283A (zh) * | 2016-02-24 | 2016-04-13 | 南京康尼新能源汽车零部件有限公司 | 一种动力输出轴的防过载的传动装置 |
| CN106044612A (zh) * | 2016-08-16 | 2016-10-26 | 福州大学 | 双速千斤顶及其工作方法 |
| CN109592616A (zh) * | 2013-11-15 | 2019-04-09 | 施耐宝公司 | 可拆卸的卧式千斤顶鞍座 |
| CN111453645A (zh) * | 2019-01-18 | 2020-07-28 | 北京京东尚科信息技术有限公司 | 举升装置及具有该装置的agv小车 |
| CN116104346A (zh) * | 2023-04-10 | 2023-05-12 | 中国电建集团山东电力建设第一工程有限公司 | 一种横担升降式电杆 |
| CN116441839A (zh) * | 2023-06-14 | 2023-07-18 | 艾瑞(成都)排放控制技术有限公司 | 端锥焊接夹具 |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6092797A (en) * | 1999-03-10 | 2000-07-25 | You; Yen-Jen | Quick clamping type vice |
| EP1872028A1 (en) * | 2005-04-11 | 2008-01-02 | Grigoryan, Emil | Spiral gear |
| US7232120B2 (en) | 2005-07-19 | 2007-06-19 | Black & Decker Inc. | Quick clamping system for a workbench |
| CN1834496B (zh) * | 2006-04-18 | 2010-09-08 | 黄昌国 | 柔性丝杠自动啮合快速调距机构 |
| DE202006016114U1 (de) | 2006-10-20 | 2006-12-21 | Brückner Trockentechnik GmbH & Co. KG | Vorrichtung zur Behandlung einer Warenbahn |
| CN101259603B (zh) | 2007-11-09 | 2012-06-27 | 范朝来 | 一种节材型多功能台钳 |
| DE202011103223U1 (de) * | 2011-07-08 | 2012-10-11 | Kuka Systems Gmbh | Arbeitsvorrichtung |
| DE102012211508A1 (de) * | 2012-07-03 | 2014-01-09 | Dewertokin Gmbh | Vorrichtung zur Steuerung eines Möbelantriebs |
| EP3239052B1 (en) * | 2016-04-30 | 2019-02-06 | Hamilton Sundstrand Corporation | Locking and unlocking mechanism |
| KR102359926B1 (ko) * | 2017-10-31 | 2022-02-07 | 현대자동차 주식회사 | 차량용 리프팅 잭 |
| CN108275618A (zh) * | 2018-02-12 | 2018-07-13 | 上海外高桥造船有限公司 | 一种带锁紧装置的螺纹支撑杆 |
| CN108972339A (zh) * | 2018-09-12 | 2018-12-11 | 惠州市坤豪塑胶电器制品有限公司 | 一种方便使用的不锈钢门把手除锈用夹持装置 |
| JP7352167B2 (ja) | 2019-11-05 | 2023-09-28 | 株式会社アイシン | 駆動装置 |
| CN115388278B (zh) * | 2022-08-12 | 2024-05-14 | 贵州电网有限责任公司 | 一种用于变电站伸缩旋转支架的旋转限位机构 |
| US11912324B1 (en) * | 2023-10-19 | 2024-02-27 | Omni Cubed, Inc. | Dolly and cart system with independently slidable jaws |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4569242A (en) * | 1981-04-27 | 1986-02-11 | Anny Hu | Rapid advancing and retracting mechanism for clamping device |
| US4834355A (en) * | 1987-09-03 | 1989-05-30 | Chaolai Fan | Mechanical program-controlled fast range-adjusting device |
| US4923185A (en) * | 1987-09-04 | 1990-05-08 | Chaolai Fan | Vertical-lift screw drive mechanism |
| CN2065969U (zh) * | 1989-04-14 | 1990-11-21 | 田芸 | 全钳口压力行程快速台虎钳 |
| CN1047466A (zh) * | 1989-05-22 | 1990-12-05 | 田芸 | 全钳口压力行程快速台虎钳或平口钳 |
| CN2057131U (zh) * | 1989-10-24 | 1990-05-16 | 田芸 | 快速台虎钳或平口钳 |
| CN2078210U (zh) * | 1990-09-13 | 1991-06-05 | 吴光生 | 一种全行程夹紧的快速台虎钳 |
| CN1024037C (zh) * | 1991-04-03 | 1994-03-16 | 范朝来 | 三点包容螺母升降自动同步开合式螺杆机构 |
| US5282392A (en) * | 1991-01-31 | 1994-02-01 | Chaolai Fan | Synchro-clutching screw-and-nut mechanism |
| US5306248A (en) * | 1992-04-07 | 1994-04-26 | C. R. Bard, Inc. | Selectively controllable inflation-deflation device adapted for use in angioplasty procedures |
| CN2139872Y (zh) * | 1992-12-03 | 1993-08-11 | 卢国骥 | 一种台式快夹虎钳 |
| CN1042055C (zh) * | 1993-04-23 | 1999-02-10 | 范朝来 | 一种快慢速螺杆传动机构 |
-
1994
- 1994-08-18 CN CN94114934A patent/CN1117018A/zh active Pending
-
1995
- 1995-08-18 AU AU32516/95A patent/AU704054B2/en not_active Ceased
- 1995-08-18 PL PL95318678A patent/PL179442B1/pl not_active IP Right Cessation
- 1995-08-18 BR BR9509067A patent/BR9509067A/pt not_active IP Right Cessation
- 1995-08-18 EP EP95928941A patent/EP0774599B1/en not_active Expired - Lifetime
- 1995-08-18 WO PCT/CN1995/000068 patent/WO1996006292A1/zh active IP Right Grant
- 1995-08-18 CA CA002198244A patent/CA2198244C/en not_active Expired - Fee Related
-
1997
- 1997-02-18 US US08/801,216 patent/US5970812A/en not_active Expired - Lifetime
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101966970A (zh) * | 2009-07-08 | 2011-02-09 | 信孚产业股份有限公司 | 剪式千斤顶 |
| CN101966970B (zh) * | 2009-07-08 | 2012-12-12 | 信孚产业股份有限公司 | 剪式千斤顶 |
| CN109592616A (zh) * | 2013-11-15 | 2019-04-09 | 施耐宝公司 | 可拆卸的卧式千斤顶鞍座 |
| CN105485283A (zh) * | 2016-02-24 | 2016-04-13 | 南京康尼新能源汽车零部件有限公司 | 一种动力输出轴的防过载的传动装置 |
| CN105485283B (zh) * | 2016-02-24 | 2018-02-23 | 南京康尼新能源汽车零部件有限公司 | 一种动力输出轴的防过载的传动装置 |
| CN106044612A (zh) * | 2016-08-16 | 2016-10-26 | 福州大学 | 双速千斤顶及其工作方法 |
| CN111453645A (zh) * | 2019-01-18 | 2020-07-28 | 北京京东尚科信息技术有限公司 | 举升装置及具有该装置的agv小车 |
| CN116104346A (zh) * | 2023-04-10 | 2023-05-12 | 中国电建集团山东电力建设第一工程有限公司 | 一种横担升降式电杆 |
| CN116104346B (zh) * | 2023-04-10 | 2023-08-22 | 中国电建集团山东电力建设第一工程有限公司 | 一种横担升降式电杆 |
| CN116441839A (zh) * | 2023-06-14 | 2023-07-18 | 艾瑞(成都)排放控制技术有限公司 | 端锥焊接夹具 |
| CN116441839B (zh) * | 2023-06-14 | 2023-08-22 | 艾瑞(成都)排放控制技术有限公司 | 端锥焊接夹具 |
Also Published As
| Publication number | Publication date |
|---|---|
| US5970812A (en) | 1999-10-26 |
| BR9509067A (pt) | 1998-11-03 |
| AU3251695A (en) | 1996-03-14 |
| PL179442B1 (pl) | 2000-09-29 |
| AU704054B2 (en) | 1999-04-15 |
| CA2198244C (en) | 2002-05-21 |
| CA2198244A1 (en) | 1996-02-29 |
| JPH10504374A (ja) | 1998-04-28 |
| EP0774599B1 (en) | 2001-12-12 |
| JP3510895B2 (ja) | 2004-03-29 |
| PL318678A1 (en) | 1997-07-07 |
| EP0774599A1 (en) | 1997-05-21 |
| EP0774599A4 (en) | 2000-05-03 |
| WO1996006292A1 (fr) | 1996-02-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1117018A (zh) | 快速升降式千斤顶 | |
| CN1091672C (zh) | 换刀装置及用于机床的方法 | |
| EP2191933B1 (de) | Werkzeugwechsler für Werkzeugmaschinen | |
| CN108274262B (zh) | 一种供机床使用的夹具 | |
| EP3976328B1 (de) | Multibearbeitungseinheit | |
| CN102490177B (zh) | 四自由度并联机器人 | |
| CN112024930B (zh) | 一种适用于组合机床加工汽车刹车盘的可调节钻孔装置 | |
| DE102010036263B4 (de) | Schmieröl-Zuführstruktur | |
| DE102020109601A1 (de) | Fahrzeugaufhängung | |
| CN102490186B (zh) | 新型四自由度并联机械手 | |
| CN108942900B (zh) | 串联式绳驱机械手关节运动的被动解耦机构 | |
| CN2238823Y (zh) | 快速升降式千斤顶 | |
| CN111922395B (zh) | 一种cng大容积钢质无缝气瓶瓶口铣方专机 | |
| CN2661365Y (zh) | 换刀装置的连动结构 | |
| CN205414455U (zh) | 一种车削加工专用夹具 | |
| CN1065514A (zh) | 螺母升降自动开合式新型螺杆机构 | |
| CN109648505B (zh) | 一种圆柱型汽车零件用气动翻转装置 | |
| CN110481415A (zh) | 一种用于货车的便于使用型管状货物固定装置 | |
| CN1044029C (zh) | 柔性自动啮合快速调距式螺杆机构 | |
| CN216178481U (zh) | 一种铣削加工用的固定组件 | |
| CN212286612U (zh) | 螺钉安装自动变径装置 | |
| CN1042055C (zh) | 一种快慢速螺杆传动机构 | |
| CN108545682A (zh) | 一种电力施工车 | |
| CN211661813U (zh) | 一种齿轮生产用表面抛光装置 | |
| CN209452608U (zh) | 一种回转支承加工用定位盘 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C01 | Deemed withdrawal of patent application (patent law 1993) | ||
| WD01 | Invention patent application deemed withdrawn after publication |