CN111590326A - 一种高效率钻孔攻丝机器人 - Google Patents
一种高效率钻孔攻丝机器人 Download PDFInfo
- Publication number
- CN111590326A CN111590326A CN202010415958.2A CN202010415958A CN111590326A CN 111590326 A CN111590326 A CN 111590326A CN 202010415958 A CN202010415958 A CN 202010415958A CN 111590326 A CN111590326 A CN 111590326A
- Authority
- CN
- China
- Prior art keywords
- pipe
- fixed
- workpiece
- mounting plate
- along
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23P—METAL-WORKING NOT OTHERWISE PROVIDED FOR; COMBINED OPERATIONS; UNIVERSAL MACHINE TOOLS
- B23P23/00—Machines or arrangements of machines for performing specified combinations of different metal-working operations not covered by a single other subclass
- B23P23/02—Machine tools for performing different machining operations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/25—Movable or adjustable work or tool supports
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q11/00—Accessories fitted to machine tools for keeping tools or parts of the machine in good working condition or for cooling work; Safety devices specially combined with or arranged in, or specially adapted for use in connection with, machine tools
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q11/00—Accessories fitted to machine tools for keeping tools or parts of the machine in good working condition or for cooling work; Safety devices specially combined with or arranged in, or specially adapted for use in connection with, machine tools
- B23Q11/0042—Devices for removing chips
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q11/00—Accessories fitted to machine tools for keeping tools or parts of the machine in good working condition or for cooling work; Safety devices specially combined with or arranged in, or specially adapted for use in connection with, machine tools
- B23Q11/0042—Devices for removing chips
- B23Q11/0046—Devices for removing chips by sucking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q15/00—Automatic control or regulation of feed movement, cutting velocity or position of tool or work
- B23Q15/20—Automatic control or regulation of feed movement, cutting velocity or position of tool or work before or after the tool acts upon the workpiece
- B23Q15/22—Control or regulation of position of tool or workpiece
- B23Q15/24—Control or regulation of position of tool or workpiece of linear position
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Auxiliary Devices For Machine Tools (AREA)
Abstract
本发明涉及一种高效率钻孔攻丝机器人,其包括支架,支架上安装有若干加工单元,加工单元包括第一直线模组;第一直线模组上安装有第一滑板,第一滑板上安装有升降驱动件,升降驱动件上安装有第一安装板;第一安装板上设有若干滑块,滑块上转动连接有旋转件,相邻两组旋转件上缠绕有同一皮带,皮带内侧设有收紧杆,收紧杆上固定有伸缩杆,伸缩杆的伸缩端上固定有限位环;所有收紧杆上设有同一移动板,第一安装板上固定有第一电机、第一带动件、第二带动件。多组加工单元能够同时对工件进行加工,且每一加工单元均能够同时进行多组钻孔与攻丝;第一带动件和第二带动件能够同时调节每两组相邻旋转件之间的间距。本发明提高了工件的加工效率。
Description
技术领域
本发明涉及金属加工设备的技术领域,尤其是涉及一种高效率钻孔攻丝机器人。
背景技术
现有工件上的钻孔和攻丝通常是由工人手持钻孔机和攻丝机来完成的。
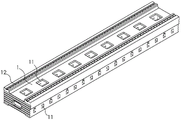
如图1所示,现有一种大型的钢制工件1,其内部呈镂空设置,其侧部和表面上铣削有若干连通于其内部的贯穿槽11。在工件1的加工过程中,需要先使用钻孔机在工件1的两边均钻出若干沿其长度方向依次排布的盲孔12,然后通过攻丝机在盲孔12的基础上进行攻丝。
但是,通常这种工件的长度在5000-20000mm之间,而盲孔之间的间距在200-300mm之间,故工件每一边盲孔的数量均在17-100个之间,若盲孔的钻孔和攻丝均由人工来操作,则花费时间长,效率低下;若采用钻孔和攻丝机床对工件进行加工,则因钻孔和攻丝机床的加工范围在2米左右,故需要多次移动工件并多次校准钻头和攻丝头的位置,颇为不便,加工效率仍较为低下,因此需要改进。
发明内容
针对现有技术存在的不足,本发明的目的是提供一种高效率钻孔攻丝机器人,提高了工件的加工效率。
本发明的上述目的是通过以下技术方案得以实现的:一种高效率钻孔攻丝机器人,包括支架,支架上安装有若干沿工件长度方向依次排布的加工单元,加工单元包括沿工件长度方向延伸的第一直线模组;第一直线模组上安装有第一滑板,第一滑板上安装有升降驱动件,升降驱动件上安装有第一安装板;第一安装板上设有若干滑块,位于边部的其一滑块固定在第一安装板上,其余滑块均沿工件的长度方向滑移连接于第一安装板;滑块上转动连接有旋转件,一半数量的旋转件为钻头,另一半数量的旋转件为攻丝头,钻头设于所有攻丝头的一侧;相邻两组旋转件上缠绕有同一皮带,皮带内侧设有收紧杆,收紧杆上固定有伸缩杆,伸缩杆的伸缩端上固定有供旋转件转动嵌设的限位环;所有收紧杆上设有同一移动板,收紧杆沿工件长度方向滑移连接于移动板;第一安装板上固定有第一电机、带动移动板沿工件宽度方向运动的第一带动件、带动位于边部的另一滑块沿工件长度方向运动的第二带动件,第一电机的输出轴固定连接于固定在第一安装板上的滑块上的旋转件。
通过采用上述技术方案,在工件的加工过程中,先通过手持钻孔机在每一加工单元的下方均钻出若干盲孔,盲孔的数量等于攻丝头的数量;再通过第一直线模组带动第一滑板运动,使得钻头位于工件未加工处的正上方,并使得攻丝头对应于盲孔;然后启动第一电机,在皮带的作用下,所有旋转件均将同步同向旋转,限位环使得旋转件在旋转过程中不易晃动;随后通过升降驱动件带动第一安装板下降,钻头将对工件进行钻孔,而攻丝头将对已钻出的盲孔进行攻丝;本发明中的加工单元能够同时对工件进行加工,且每一加工单元均能够同时进行多组钻孔与攻丝,从而提高了工件的加工效率;当工件的一边加工完成后,移动工件,即可进行另一边的加工。
当所需加工的盲孔孔距改变时,通过第一带动件带动收紧杆运动,并通过第二带动件带动滑块运动,此时所有伸缩杆的长度均将发生改变,所有皮带均保持张紧状态,并促使对应的收紧杆和滑块沿工件的长度方向运动,使得相邻旋转件之间的间距改变。
因所有伸缩杆的两端均同步运动,故所有伸缩杆的长度均相等;因相邻两组旋转件的连接线与伸缩杆之间的夹角角度是不变的,皮带的长度是固定的,滑块和收紧杆仅可沿工件的长度方向滑动,故每两组相邻旋转件之间的间距均相等。因此,通过第一带动件和第二带动件即可同时调节每两组相邻旋转件之间的间距,操作方便,从而进一步提高了工件的加工效率。
本发明在一较佳示例中可以进一步配置为:所述限位环上开设有沿竖直方向延伸的第一螺纹通槽,第一螺纹通槽内螺纹配合有抵紧于第一安装板的第一螺栓。
通过采用上述技术方案,当相邻两组旋转件之间的间距调节完成后,将第一螺栓螺纹配合于第一螺纹通槽并抵紧于第一安装板,即可将限位环锁紧固定,从而进一步使得旋转件不易晃动。
本发明在一较佳示例中可以进一步配置为:所述滑块上固定有冷却管,冷却管的管口朝向旋转件,冷却管通过第一软管与外部冷却水箱相连。
通过采用上述技术方案,在旋转件对工件进行加工的过程中,冷却管将向加工处喷射冷却水,从而减少了旋转件损坏的情况发生。
本发明在一较佳示例中可以进一步配置为:所述加工单元沿工件的宽度方向依次设有两组。
通过采用上述技术方案,两组加工单元能够同时对工件上表面的两边进行加工,从而进一步提高了工件的加工效率。
本发明在一较佳示例中可以进一步配置为:沿工件宽度方向设置的两组所述加工单元之间设有安装在支架上的第二直线模组,第二直线模组上安装有第二滑板,第二滑板上设有固定管,固定管通过连接管连通有沿水平方向延伸的第一吸屑管,第一吸屑管的管口朝下并正对于工件的上表面,固定管通过第二软管与外部吸屑机相连。
通过采用上述技术方案,在旋转件对工件进行加工的过程中,第二直线模组将带动第二滑板运动,使得第一吸屑管移动至加工完成处,然后工件上表面的废屑将通过第一吸屑管、连接管、固定管和第二软管进入到外部吸屑机内,实现了对废屑的吸除。
本发明在一较佳示例中可以进一步配置为:所述第二滑板上固定有第三电缸,第三电缸的活塞杆沿竖直方向延伸并固定有第二安装板,固定管固定在第二安装板上。
通过采用上述技术方案,第三电缸能够带动第二安装板升降,使得第一吸屑管能够对不同高度的工件进行废屑吸除。
本发明在一较佳示例中可以进一步配置为:所述连接管绕自身轴线转动嵌设在固定管内,固定管上设有带动连接管旋转的带动组件;第一吸屑管通过第三软管连通于连接管,且第一吸屑管沿水平方向滑移连接于连接管,连接管上设有用于将第一吸屑管锁紧固定的锁紧件。
通过采用上述技术方案,带动组件能够带动连接管绕自身轴线旋转,第一吸屑管能够沿水平方向滑动并通过锁紧件锁紧固定在连接管上,使得第一吸屑管的转动范围发生改变,从而使得第一吸屑管能够对不同宽度工件上的废屑进行吸除。
本发明在一较佳示例中可以进一步配置为:所述连接管的下端设有沿水平方向延伸的第二吸屑管,第二吸屑管通过第四软管连通于连接管,第二吸屑管的管口朝下并正对于工件的底部内壁。
通过采用上述技术方案,在工件进行外形铣削、钻孔和攻丝的过程中,部分废屑将通过贯穿槽进入到工件的内侧;当第三电缸带动第二安装板下降时,第二吸屑管将进入到工件内侧;当带动组件带动连接管旋转时,第二吸屑管也将旋转并对工件内侧底部的废屑进行吸除。
综上所述,本发明包括以下有益技术效果:
1.加工单元的设置,能够同时对工件进行加工,且每一加工单元均能够同时进行多组钻孔与攻丝,从而提高了工件的加工效率;
2.滑块、收紧杆、皮带、伸缩杆、移动板、第一带动件和第二带动件的设置,通过第一带动件和第二带动件即可同时调节每两组相邻旋转件之间的间距,操作方便,从而进一步提高了工件的加工效率;
3.限位环和第一螺栓的设置,使得旋转件不易晃动;
4.第二直线模组、第二滑板、固定管、连接管和第一吸屑管的设置,使得工件上表面的废屑将通过第一吸屑管、连接管、固定管和第二软管进入到外部吸屑机内;
5.第三电缸和第二安装板的设置,使得第一吸屑管能够对不同高度的工件进行废屑吸除;
6.带动组件和锁紧件的设置,使得第一吸屑管能够对不同宽度工件上的废屑进行吸除;
7.第二吸屑管的设置,能够对工件内侧底部的废屑进行吸除。
附图说明
图1是现有钢制工件的结构示意图;
图2是本发明实施例中整体结构示意图;
图3是本发明实施例中表示第一安装板上安装部件的结构示意图;
图4是本发明实施例中表示第一安装板下表面的结构示意图;
图5是本发明实施例中表示旋转件和收紧杆的结构示意图;
图6是本发明实施例中表示工件的剖视结构示意图;
图7是本发明实施例中表示第一吸屑管的结构示意图;
图8是本发明实施例中表示第二吸屑管的结构示意图。
附图标记:1、工件;11、贯穿槽;12、盲孔;2、支架;3、加工单元;31、第一直线模组;32、第一滑板;33、第四电缸;34、第一安装板;341、第一燕尾槽;35、滑块;351、第一燕尾块;36、旋转件;361、皮带槽;37、皮带;38、第一电机;39、冷却管;391、第一软管;4、第一电缸;41、移动板;411、第二燕尾槽;42、收紧杆;421、第二燕尾块;43、伸缩杆;44、限位环;45、第一螺栓;5、第二电缸;6、第二直线模组;61、第二滑板;62、第三电缸;63、第二安装板;64、固定管;641、第二软管;65、连接管;651、第三燕尾块;652、第二螺栓;653、转动块;654、上挡板;655、下挡板;656、第四燕尾块;657、第三螺栓;66、第一吸屑管;661、第三燕尾槽;67、第三软管;68、第二吸屑管;681、耐磨块;682、第四燕尾槽;69、第四软管;7、带动组件;71、从动锥齿轮;72、主动锥齿轮;73、第二电机。
具体实施方式
以下结合附图对本发明作进一步详细说明。
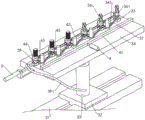
如图2所示,一种高效率钻孔攻丝机器人,包括支架2,支架2上安装有若干沿工件1长度方向依次排布的加工单元3,加工单元3沿工件1的宽度方向也依次设有两组。
如图2和图3所示,加工单元3包括沿工件1长度方向延伸的第一直线模组31,第一直线模组31上安装有第一滑板32,第一滑板32上固定有升降驱动件,升降驱动件为第四电缸33,第四电缸33的活塞杆沿竖直方向延伸并固定有第一安装板34。
如图3和图4所示,第一安装板34上设有若干滑块35,位于边部的其一滑块35固定在第一安装板34上;滑块35上转动连接有旋转件36,一半数量的旋转件36为钻头,另一半数量的旋转件36为攻丝头,钻头设于所有攻丝头的一侧;相邻两组旋转件36上缠绕有同一皮带37;第一安装板34上固定有第一电机38,第一电机38的输出轴固定连接于固定在第一安装板34上的滑块35上的旋转件36。
在工件1的加工过程中,先通过手持钻孔机在每一加工单元3的下方均钻出若干盲孔12,盲孔12的数量等于攻丝头的数量;再通过第一直线模组31带动第一滑板32运动,使得钻头位于工件1未加工处的正上方,并使得攻丝头对应于盲孔12;然后启动第一电机38,在皮带37的作用下,所有旋转件36均将同步同向旋转;随后通过第四电缸33带动第一安装板34下降,钻头将对工件1进行钻孔,而攻丝头将对已钻出的盲孔12进行攻丝;多组加工单元3能够同时对工件1进行加工,且每一加工单元3均能够同时进行多组钻孔与攻丝,从而提高了工件1的加工效率。
如图4和图5所示,滑块35上固定有冷却管39,冷却管39的管口朝向旋转件36,冷却管39通过第一软管391与外部冷却水箱相连。在旋转件36对工件1进行加工的过程中,冷却管39将向加工处喷射冷却水,从而减少了旋转件36损坏的情况发生。
如图4和图5所示,皮带37内侧设有收紧杆42,旋转件36和收紧杆42的侧壁上均设有皮带槽361,使得皮带37不易上下晃动;收紧杆42上固定有伸缩杆43;伸缩杆43包括固定在收紧杆42上的固定筒和滑动嵌设在固定筒内的滑杆,滑杆伸出到固定筒外的一端即为伸缩杆43的伸缩端,伸缩杆43的伸缩端上固定有供旋转件36转动嵌设的限位环44,使得旋转件36不易晃动;且相邻两组旋转件36的连接线与伸缩杆43之间的夹角角度为90°。
如图4和图5所示,所有收紧杆42上设有同一移动板41,收紧杆42上固定有第二燕尾块421;移动板41上开设有沿工件1长度方向延伸的第二燕尾槽411,第二燕尾块421滑动嵌设在第二燕尾槽411内,使得收紧杆42仅可沿工件1长度方向滑动。第一安装板34上固定有第一带动件,第一带动件为第一电缸4,第一电缸4的活塞杆沿工件1的宽度方向延伸并固定连接于移动板41。
如图4和图5所示,除了固定在第一安装板34上的一组滑块35,其余滑块35的上侧均固定有第一燕尾块351,第一安装板34的下表面开设有沿工件1的长度方向延伸的第一燕尾槽341,第一燕尾块351滑动嵌设在第一燕尾槽341内,使得滑块35仅可沿工件1长度方向滑动。第一安装板34上固定有第二带动件,第二带动件为第二电缸5,第二电缸5的活塞杆沿工件1的长度方向延伸并固定连接于位于边部的可滑动滑块35。
当所需加工的盲孔12孔距改变时,通过第一电缸4带动收紧杆42运动,并通过第二电缸5带动滑块35运动,此时所有伸缩杆43的长度均将发生改变,所有皮带37均保持张紧状态,并促使对应的收紧杆42和滑块35沿工件1的长度方向运动,使得相邻旋转件36之间的间距改变。
因所有伸缩杆43的长度均相等,相邻两组旋转件36的连接线与伸缩杆43之间的夹角角度是不变的,皮带37的长度是固定的,滑块35和收紧杆42仅可沿工件1的长度方向滑动,故每两组相邻旋转件36之间的间距均相等。因此,通过第一电缸4和第二电缸5的伸缩即可同时调节每两组相邻旋转件36之间的间距,操作方便,从而进一步提高了工件1的加工效率。
如图5所示,限位环44上开设有沿竖直方向延伸的第一螺纹通槽,第一螺纹通槽内螺纹配合有第一螺栓45。当相邻两组旋转件36之间的间距调节完成后,将第一螺栓45螺纹配合于第一螺纹通槽并抵紧于第一安装板34,即可将限位环44锁紧固定,从而进一步使得旋转件36不易晃动。
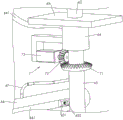
如图6所示,沿工件1宽度方向设置的两组加工单元3之间设有固定在支架2上的第二直线模组6,第二直线模组6上安装有第二滑板61;第二滑板61的下表面固定有第三电缸62,第三电缸62的活塞杆沿竖直方向延伸并固定有第二安装板63;第二安装板63的下表面固定有固定管64,固定管64通过连接管65连通有沿水平方向延伸的第一吸屑管66,第一吸屑管66的管口朝下并正对于工件1的上表面,固定管64通过第二软管641与外部吸屑机相连。
在旋转件36对工件1进行加工的过程中,第二直线模组6和第三电缸62将带动第二滑板61运动,使得第一吸屑管66移动至加工完成处,然后工件1上表面的废屑将通过第一吸屑管66、连接管65、固定管64和第二软管641进入到外部吸屑机内,实现了对废屑的吸除。
如图6和图7所示,连接管65绕自身轴线转动嵌设在固定管64内,第一吸屑管66通过第三软管67连通于连接管65;固定管64上设有带动组件7,带动组件7包括固定套设在连接管65外的从动锥齿轮71、啮合于从动锥齿轮71的主动锥齿轮72和固定在固定管64外壁上的第二电机73,第二电机73的输出轴固定嵌设在主动锥齿轮72。当第二电机73启动时,连接管65将带动第一吸屑管66旋转吸除工件1上表面的废屑。
如图7所示,连接管65的外壁上固定有第三燕尾块651,第一吸屑管66的外壁上开设有沿水平方向延伸的第三燕尾槽661,第三燕尾块651滑动嵌设在第三燕尾槽661内,使得第一吸屑管66能够沿第三燕尾槽661的开设方向滑动,使得第一吸屑管66的旋转范围发生改变,从而使得第一吸屑管66能够对不同宽度工件1上的废屑进行吸除。
如图7所示,第三燕尾块651上开设有第二螺纹通槽,第二螺纹通槽内螺纹配合有锁紧件,锁紧件为第二螺栓652。当第一吸屑管66的位置调节完成后,将第二螺栓652螺纹配合于第二螺纹通槽并抵紧于第三燕尾槽661的槽壁,即可将第一吸屑管66锁紧固定在连接管65上。
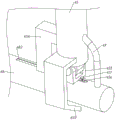
如图6所示,连接管65的下端设有沿水平方向延伸的第二吸屑管68,第二吸屑管68通过第四软管69连通于连接管65,第二吸屑管68的管口朝下并正对于工件1的底部内壁,且第二吸屑管68的端部也设有管口。当第三电缸62带动第二安装板63下降时,第二吸屑管68将进入到工件1内侧;当带动组件7带动连接管65旋转时,第二吸屑管68也将旋转并对工件1内侧底部的废屑进行吸除。
如图8所示,连接管65的下端转动连接有转动块653,第二吸屑管68设于转动块653上,第二吸屑管68的转动平面与竖直面平行,且第二吸屑管68远离于连接管65的一端处固定有耐磨块681;连接管65上固定有分设于第二吸屑管68上下两侧的上挡板654和下挡板655,上挡板654呈水平设置,下挡板655呈倾斜设置。
当第三电缸62带动第二安装板63下降,使得第二吸屑管68抵触于工件1内侧底部时,第二吸屑管68将发生旋转直至耐磨块681抵触于工件1的内侧底部,此时第二吸屑管68的上侧将抵触于上挡板654,使得第二吸屑管68不易晃动并能够旋转吸除工件1内侧底部的废屑。因第二吸屑管68在正常状态时将抵触于下挡板655,此时第二吸屑管68处于倾斜状态,第二吸屑管68能够选取的长度范围将更大,从而提高了对工件1内侧底部废屑的吸除效果。
如图8所示,转动块653上固定有第四燕尾块656;第二吸屑管68的外壁上开设有沿自身轴向延伸的第四燕尾槽682,第四燕尾块656滑动嵌设在第四燕尾槽682内,调节了第二吸屑管68的转动范围,使得第二吸屑管68能够对不同大小的工件1内侧进行废屑吸除。
如图8所示,第四燕尾块656上开设有第三螺纹通槽,第三螺纹通槽内螺纹配合有第三螺栓657。当第二吸屑管68的位置调节完成后,将第三螺栓657螺纹配合于第三螺纹通槽并抵紧于第四燕尾槽682的槽壁,即可将第二吸屑管68锁紧固定。
本实施例的实施原理为:在工件1的加工过程中,先通过手持钻孔机在每一加工单元3的下方均钻出若干盲孔12,盲孔12的数量等于攻丝头的数量;再通过第一直线模组31带动第一滑板32运动,使得钻头位于工件1未加工处的正上方,并使得攻丝头对应于盲孔12;然后启动第一电机38,在皮带37的作用下,所有旋转件36均将同步同向旋转;随后通过第四电缸33带动第一安装板34下降,钻头将对工件1进行钻孔,而攻丝头将对已钻出的盲孔12进行攻丝;多组加工单元3能够同时对工件1进行加工,且每一加工单元3均能够同时进行多组钻孔与攻丝,从而提高了工件1的加工效率。
在旋转件36对工件1进行加工的过程中,冷却管39将向加工处喷射冷却水,从而减少了旋转件36损坏的情况发生。
当所需加工的盲孔12孔距改变时,通过第一电缸4带动收紧杆42运动,并通过第二电缸5带动滑块35运动,此时所有伸缩杆43的长度均将发生改变,所有皮带37均保持张紧状态,并促使对应的收紧杆42和滑块35沿工件1的长度方向运动,使得相邻旋转件36之间的间距改变。
因所有伸缩杆43的长度均相等,相邻两组旋转件36的连接线与伸缩杆43之间的夹角角度是不变的,皮带37的长度是固定的,滑块35和收紧杆42仅可沿工件1的长度方向滑动,故每两组相邻旋转件36之间的间距均相等;然后将第一螺栓45螺纹配合于第一螺纹通槽并抵紧于第一安装板34,即可将限位环44锁紧固定,从而进一步使得旋转件36不易晃动。因此,通过第一电缸4和第二电缸5的伸缩即可同时调节每两组相邻旋转件36之间的间距,操作方便,从而进一步提高了工件1的加工效率。
在旋转件36对工件1进行加工的过程中,第二直线模组6和第三电缸62将带动第二滑板61运动,使得第一吸屑管66移动至加工完成处,而第二吸屑管68将通过贯穿槽11抵触于工件1内侧底部,第二吸屑管68将发生旋转直至耐磨块681抵触于工件1的内侧底部,此时第二吸屑管68的上侧将抵触于上挡板654,使得第二吸屑管68不易晃动。
然后第二电机73将带动主动锥齿轮72旋转,从动锥齿轮71、连接管65、第一吸屑管66和第二吸屑管68将发生旋转,工件1上表面的废屑将通过第一吸屑管66、连接管65、固定管64和第二软管641进入到外部吸屑机内,工件1内侧底部的废屑将通过第二吸屑管68、第四软管69、连接管65、固定管64和第二软管641进入到外部吸屑机内,从而实现了对工件1上废屑的吸除。
本具体实施方式的实施例均为本发明的较佳实施例,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
Claims (8)
1.一种高效率钻孔攻丝机器人,其特征在于:包括支架(2),支架(2)上安装有若干沿工件(1)长度方向依次排布的加工单元(3),加工单元(3)包括沿工件(1)长度方向延伸的第一直线模组(31);第一直线模组(31)上安装有第一滑板(32),第一滑板(32)上安装有升降驱动件,升降驱动件上安装有第一安装板(34);第一安装板(34)上设有若干滑块(35),位于边部的其一滑块(35)固定在第一安装板(34)上,其余滑块(35)均沿工件(1)的长度方向滑移连接于第一安装板(34);滑块(35)上转动连接有旋转件(36),一半数量的旋转件(36)为钻头,另一半数量的旋转件(36)为攻丝头,钻头设于所有攻丝头的一侧;相邻两组旋转件(36)上缠绕有同一皮带(37),皮带(37)内侧设有收紧杆(42),收紧杆(42)上固定有伸缩杆(43),伸缩杆(43)的伸缩端上固定有供旋转件(36)转动嵌设的限位环(44);所有收紧杆(42)上设有同一移动板(41),收紧杆(42)沿工件(1)长度方向滑移连接于移动板(41);第一安装板(34)上固定有第一电机(38)、带动移动板(41)沿工件(1)宽度方向运动的第一带动件、带动位于边部的另一滑块(35)沿工件(1)长度方向运动的第二带动件,第一电机(38)的输出轴固定连接于固定在第一安装板(34)上的滑块(35)上的旋转件(36)。
2.根据权利要求1所述的一种高效率钻孔攻丝机器人,其特征在于:所述限位环(44)上开设有沿竖直方向延伸的第一螺纹通槽,第一螺纹通槽内螺纹配合有抵紧于第一安装板(34)的第一螺栓(45)。
3.根据权利要求1所述的一种高效率钻孔攻丝机器人,其特征在于:所述滑块(35)上固定有冷却管(39),冷却管(39)的管口朝向旋转件(36),冷却管(39)通过第一软管(391)与外部冷却水箱相连。
4.根据权利要求1所述的一种高效率钻孔攻丝机器人,其特征在于:所述加工单元(3)沿工件(1)的宽度方向依次设有两组。
5.根据权利要求4所述的一种高效率钻孔攻丝机器人,其特征在于:沿工件(1)宽度方向设置的两组所述加工单元(3)之间设有安装在支架(2)上的第二直线模组(6),第二直线模组(6)上安装有第二滑板(61),第二滑板(61)上设有固定管(64),固定管(64)通过连接管(65)连通有沿水平方向延伸的第一吸屑管(66),第一吸屑管(66)的管口朝下并正对于工件(1)的上表面,固定管(64)通过第二软管(641)与外部吸屑机相连。
6.根据权利要求5所述的一种高效率钻孔攻丝机器人,其特征在于:所述第二滑板(61)上固定有第三电缸(62),第三电缸(62)的活塞杆沿竖直方向延伸并固定有第二安装板(63),固定管(64)固定在第二安装板(63)上。
7.根据权利要求6所述的一种高效率钻孔攻丝机器人,其特征在于:所述连接管(65)绕自身轴线转动嵌设在固定管(64)内,固定管(64)上设有带动连接管(65)旋转的带动组件(7);第一吸屑管(66)通过第三软管(67)连通于连接管(65),且第一吸屑管(66)沿水平方向滑移连接于连接管(65),连接管(65)上设有用于将第一吸屑管(66)锁紧固定的锁紧件。
8.根据权利要求7所述的一种高效率钻孔攻丝机器人,其特征在于:所述连接管(65)的下端设有沿水平方向延伸的第二吸屑管(68),第二吸屑管(68)通过第四软管(69)连通于连接管(65),第二吸屑管(68)的管口朝下并正对于工件(1)的底部内壁。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010415958.2A CN111590326B (zh) | 2020-05-16 | 2020-05-16 | 一种钻孔攻丝机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010415958.2A CN111590326B (zh) | 2020-05-16 | 2020-05-16 | 一种钻孔攻丝机器人 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111590326A true CN111590326A (zh) | 2020-08-28 |
| CN111590326B CN111590326B (zh) | 2021-04-23 |
Family
ID=72183506
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202010415958.2A Active CN111590326B (zh) | 2020-05-16 | 2020-05-16 | 一种钻孔攻丝机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN111590326B (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112743119A (zh) * | 2021-01-12 | 2021-05-04 | 艾利合(南京)机电设备有限公司 | 具有等分调节机构的机械加工用钻孔机器人及其应用 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN201267939Y (zh) * | 2008-09-26 | 2009-07-08 | 徐亮 | 变距式钻攻两用机 |
| CN204339369U (zh) * | 2014-11-24 | 2015-05-20 | 重庆金辰机械制造有限公司 | 压缩机缸体横向钻孔攻丝铣面多工位夹具 |
| CN105817886A (zh) * | 2016-03-31 | 2016-08-03 | 安徽奇峰机械装备有限公司 | 一种对工件连续钻孔攻丝装置 |
| CN208663050U (zh) * | 2018-04-08 | 2019-03-29 | 深圳市奥力压铸五金制品有限公司 | 全自动钻孔攻牙装置 |
| CN111152024A (zh) * | 2020-01-16 | 2020-05-15 | 蓝海五金(深圳)有限公司 | 一种轴类零件钻孔、攻丝一体化加工设备 |
| CN212169588U (zh) * | 2020-05-16 | 2020-12-18 | 杭州万科机械有限公司 | 一种钻孔攻丝一体化设备 |
-
2020
- 2020-05-16 CN CN202010415958.2A patent/CN111590326B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN201267939Y (zh) * | 2008-09-26 | 2009-07-08 | 徐亮 | 变距式钻攻两用机 |
| CN204339369U (zh) * | 2014-11-24 | 2015-05-20 | 重庆金辰机械制造有限公司 | 压缩机缸体横向钻孔攻丝铣面多工位夹具 |
| CN105817886A (zh) * | 2016-03-31 | 2016-08-03 | 安徽奇峰机械装备有限公司 | 一种对工件连续钻孔攻丝装置 |
| CN208663050U (zh) * | 2018-04-08 | 2019-03-29 | 深圳市奥力压铸五金制品有限公司 | 全自动钻孔攻牙装置 |
| CN111152024A (zh) * | 2020-01-16 | 2020-05-15 | 蓝海五金(深圳)有限公司 | 一种轴类零件钻孔、攻丝一体化加工设备 |
| CN212169588U (zh) * | 2020-05-16 | 2020-12-18 | 杭州万科机械有限公司 | 一种钻孔攻丝一体化设备 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112743119A (zh) * | 2021-01-12 | 2021-05-04 | 艾利合(南京)机电设备有限公司 | 具有等分调节机构的机械加工用钻孔机器人及其应用 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111590326B (zh) | 2021-04-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104369232B (zh) | 双主轴双工作台龙门式重型木材复合加工中心 | |
| CN110496997B (zh) | 一种用于模具生产的具有清理功能的防护型钻床 | |
| CN107309467A (zh) | 一种废屑易于清理的摩托车配件加工设备 | |
| CN111590326B (zh) | 一种钻孔攻丝机器人 | |
| CN204322225U (zh) | 双主轴双工作台龙门式重型木材复合加工中心 | |
| CN114749704A (zh) | 一种用于机械材料加工的表面铣削装置 | |
| CN107225256B (zh) | 车铣镗多功能卧式车床的立式车削结构 | |
| CN111001859B (zh) | 一种龙门铣床的可控滑移结构 | |
| CN212169588U (zh) | 一种钻孔攻丝一体化设备 | |
| CN107962394B (zh) | 一种多功能钻攻铣床及其操作方法 | |
| CN113523368A (zh) | 一种数控加工中心用数控龙门铣床 | |
| CN213702084U (zh) | 一种多工位一体化攻牙设备 | |
| CN114769658A (zh) | 一种螺栓生产用螺杆头部开孔装置及其开孔方法 | |
| CN210255073U (zh) | 一种带旋转锯切装置的加工中心 | |
| CN207942508U (zh) | 一种双工序加排钻开料机 | |
| CN110744088A (zh) | 一种接头钻孔用卧式镗床 | |
| CN116944888B (zh) | 一种加长型转向器长壳体齿条孔加工装置 | |
| CN210081136U (zh) | 一种控制焊枪进给的镋铣装置 | |
| CN215787261U (zh) | 自动攻牙设备 | |
| CN212793942U (zh) | 一种用于加工激光切割机床身的行程延长机构 | |
| CN219052970U (zh) | 一种摇臂钻床定程装置 | |
| CN214684612U (zh) | 自动攻牙设备及其横向攻牙装置 | |
| CN220992858U (zh) | 一种机床工作台加工用钻孔装置 | |
| CN212418938U (zh) | 一种高效率废屑清理设备 | |
| CN220574794U (zh) | 一种内链轮轮边制动器外壳钻孔装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| PE01 | Entry into force of the registration of the contract for pledge of patent right | ||
| PE01 | Entry into force of the registration of the contract for pledge of patent right |
Denomination of invention: A drilling and tapping robot Effective date of registration: 20221030 Granted publication date: 20210423 Pledgee: Zhejiang Xiaoshan Rural Commercial Bank Co.,Ltd. Chengnan sub branch Pledgor: Hangzhou Vanke Machinery Co.,Ltd. Registration number: Y2022330002846 |