CN111343896A - 内窥镜系统 - Google Patents
内窥镜系统 Download PDFInfo
- Publication number
- CN111343896A CN111343896A CN201880072777.5A CN201880072777A CN111343896A CN 111343896 A CN111343896 A CN 111343896A CN 201880072777 A CN201880072777 A CN 201880072777A CN 111343896 A CN111343896 A CN 111343896A
- Authority
- CN
- China
- Prior art keywords
- elongate member
- flexible elongate
- endoscope
- endoscopic system
- distal end
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000033001 locomotion Effects 0.000 claims abstract description 49
- 238000013519 translation Methods 0.000 claims abstract description 29
- 210000002435 tendon Anatomy 0.000 claims abstract description 25
- 238000012546 transfer Methods 0.000 claims abstract description 16
- 230000008878 coupling Effects 0.000 claims abstract description 15
- 238000010168 coupling process Methods 0.000 claims abstract description 15
- 238000005859 coupling reaction Methods 0.000 claims abstract description 15
- 238000003032 molecular docking Methods 0.000 claims description 57
- 238000003780 insertion Methods 0.000 claims description 12
- 230000037431 insertion Effects 0.000 claims description 12
- 239000000463 material Substances 0.000 claims description 12
- 229910052751 metal Inorganic materials 0.000 claims description 7
- 239000002184 metal Substances 0.000 claims description 7
- 238000004804 winding Methods 0.000 claims description 7
- 229910001000 nickel titanium Inorganic materials 0.000 claims description 5
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 claims description 5
- 235000012771 pancakes Nutrition 0.000 claims description 4
- 230000007797 corrosion Effects 0.000 claims description 3
- 238000005260 corrosion Methods 0.000 claims description 3
- 230000002265 prevention Effects 0.000 claims description 3
- 230000001902 propagating effect Effects 0.000 claims description 3
- 229920000642 polymer Polymers 0.000 claims description 2
- 230000007246 mechanism Effects 0.000 description 53
- 239000012530 fluid Substances 0.000 description 26
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 21
- 239000011295 pitch Substances 0.000 description 17
- 230000002262 irrigation Effects 0.000 description 13
- 238000003973 irrigation Methods 0.000 description 13
- 238000005452 bending Methods 0.000 description 12
- 230000006870 function Effects 0.000 description 12
- 208000027418 Wounds and injury Diseases 0.000 description 11
- 238000004140 cleaning Methods 0.000 description 10
- 230000004913 activation Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 239000000523 sample Substances 0.000 description 6
- 230000001954 sterilising effect Effects 0.000 description 6
- 238000004659 sterilization and disinfection Methods 0.000 description 6
- 238000001356 surgical procedure Methods 0.000 description 6
- 230000007935 neutral effect Effects 0.000 description 5
- 230000004888 barrier function Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 230000006835 compression Effects 0.000 description 4
- 238000007906 compression Methods 0.000 description 4
- 239000012528 membrane Substances 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000009467 reduction Effects 0.000 description 4
- 238000005096 rolling process Methods 0.000 description 4
- RVCKCEDKBVEEHL-UHFFFAOYSA-N 2,3,4,5,6-pentachlorobenzyl alcohol Chemical compound OCC1=C(Cl)C(Cl)=C(Cl)C(Cl)=C1Cl RVCKCEDKBVEEHL-UHFFFAOYSA-N 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 210000001035 gastrointestinal tract Anatomy 0.000 description 3
- 230000002829 reductive effect Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 210000001072 colon Anatomy 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 239000012636 effector Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 238000002955 isolation Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 210000000056 organ Anatomy 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 230000001681 protective effect Effects 0.000 description 2
- 229910000990 Ni alloy Inorganic materials 0.000 description 1
- 229910001069 Ti alloy Inorganic materials 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 238000001574 biopsy Methods 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 230000001186 cumulative effect Effects 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000000916 dilatatory effect Effects 0.000 description 1
- 238000002224 dissection Methods 0.000 description 1
- 210000003238 esophagus Anatomy 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000023597 hemostasis Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000011065 in-situ storage Methods 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 230000000670 limiting effect Effects 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 210000003800 pharynx Anatomy 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 238000007790 scraping Methods 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 210000002784 stomach Anatomy 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
Images








































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/018—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor for receiving instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00112—Connection or coupling means
- A61B1/00121—Connectors, fasteners and adapters, e.g. on the endoscope handle
- A61B1/00128—Connectors, fasteners and adapters, e.g. on the endoscope handle mechanical, e.g. for tubes or pipes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
- A61B1/0057—Constructional details of force transmission elements, e.g. control wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
- A61B2034/742—Joysticks
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
- A61B2090/508—Supports for surgical instruments, e.g. articulated arms with releasable brake mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2218/00—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2218/001—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body having means for irrigation and/or aspiration of substances to and/or from the surgical site
- A61B2218/002—Irrigation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2218/00—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2218/001—Details of surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body having means for irrigation and/or aspiration of substances to and/or from the surgical site
- A61B2218/007—Aspiration
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0043—Catheters; Hollow probes characterised by structural features
- A61M2025/0059—Catheters; Hollow probes characterised by structural features having means for preventing the catheter, sheath or lumens from collapsing due to outer forces, e.g. compressing forces, or caused by twisting or kinking
Abstract
提供了一种内窥镜系统,其包括具有形成在其中的中空管的内窥镜;柔性细长构件,该柔性细长构件具有用于操作控制的第一端和用于操作机器人构件的第二远端;在柔性细长构件的第一端可耦接至柔性细长构件的一个或多个致动器;以及相对于中空管布置在内窥镜的第一端的防屈曲管,以防止一个或多个致动器的平移期间柔性细长构件屈曲。还公开了不同的实施例,包括一种内窥镜,其包括一个或多个柔性腱绳,该腱绳具有线圈护套,该线圈护套包括具有基本上矩形的横截面的线;或一种内窥镜,其包括旋转运动传递装置,一个或多个柔性腱绳和其上具有防扭结支撑件的一个或多个电线,将机器人构件约束到非对称的运动范围的耦接装置,或包括居中对准的滑轮的扭矩关节装置以耦接机器人构件。
Description
优先权要求
本申请要求于2017年11月09日提交的新加坡专利申请号10201709245X的优先权。
技术领域
本发明总体上但不排他地涉及内窥镜系统。
背景技术
内窥镜是用于检查身体的中空器官或空腔的内部和/或将器械递送到身体的中空器官或空腔的内部的中空管。例如,可以使用内窥镜检查上消化道(例如,咽喉、食道或胃)或下消化道(例如,结肠)。内窥镜通常向内部区域提供光,并为内镜医师提供视觉以在器官或空腔内导航。一旦识别需要治疗的区域,就将用于治疗所识别位置的必要器械插入内窥镜内的中空管中并操纵到该区域。器械可以例如用于去除结肠中的息肉或从所识别的区域内采集活检组织样本以进行测试。
器械是柔性细长构件,其通过内窥镜的中空管被馈送到治疗部位。为了精确地操作器械,重要的是防止柔性细长构件的扭结和屈曲。在一些实施例中,线圈护套缠绕在电缆周围。但是,具有圆形线圈护套的电缆虽然足以传递压缩力,但是当在线圈护套上存在大量弯曲时易于屈曲或扭结,从而导致线圈护套内部的区域变窄。由于线圈护套的屈曲/扭结而导致的管腔变窄导致电缆与线圈护套之间的摩擦增大,从而降低了电缆的力传递效率。
因此,需要克服上述缺点的内窥镜装置和内窥镜系统。此外,结合附图和本公开的背景技术,根据随后的详细描述和所附权利要求,其他期望的特征和特性将变得显而易见。
发明内容
根据本发明的一方面,提供了一种内窥镜系统。该内窥镜系统包括内窥镜、柔性细长构件、一个或多个致动器和防屈曲管。内窥镜具有形成在其中的中空管,并且具有可耦接到对接站的第一端和第二远端。柔性细长构件可插入穿过内窥镜的中空管,并且具有用于操作控制的第一端和用于操作在内窥镜的远端的机器人构件的第二远端。一个或多个致动器在第一端可耦接至柔性细长构件,并且可在平行于中空管的中心轴线的方向上平移,以允许柔性细长构件的第二远端在操作期间的精细运动。并且将防屈曲管相对于中空管布置在内窥镜的第一端,使得柔性细长构件在一个或多个致动器的下游插入穿过防屈曲管,以防止在一个或多个致动器的平移期间柔性细长构件的屈曲。
根据本发明的第二方面,提供了一种内窥镜系统,其包括内窥镜和柔性细长构件。内窥镜具有形成在其中的中空管,用于插入柔性细长构件。柔性细长构件具有用于操作控制的第一端和用于操作在内窥镜的远端的机器人构件的第二远端。柔性细长构件还包括一个或多个柔性腱绳,以从第一端提供到在第二远端的机器人构件的操作控制,一个或多个柔性腱绳中的每一个都具有线圈护套,该线圈护套包括缠绕在一个或多个柔性腱绳中的相应一个上的具有基本上矩形的横截面的线。
根据本发明的第三方面,提供了一种用于内窥镜系统的柔性细长构件。柔性细长构件具有用于操作控制的第一端和用于操作在第二远端的机器人构件的第二远端。柔性细长构件包括一个或多个柔性腱绳,以从第一端提供到在第二远端的机器人构件的操作控制。一个或多个柔性腱绳中的每一个都具有线圈护套,该线圈护套包括缠绕在一个或多个柔性腱绳中的相应一个上的具有基本上矩形的横截面的线。
根据本发明的第四方面,提供了一种内窥镜系统。该内窥镜系统包括内窥镜和柔性细长构件。内窥镜具有形成在其中的中空管,用于插入柔性细长构件。柔性细长构件具有用于操作控制的第一端,并且耦接到在内窥镜的远端的机器人构件以对其进行操作。柔性细长构件包括旋转运动传递装置,该旋转运动传递装置形成柔性细长构件的轴,用于将致动从第一端传播到在第二远端的机器人构件。
根据本发明的第五方面,提供了一种用于内窥镜系统的柔性细长构件。柔性细长构件具有用于操作控制的第一端,并且耦接至在第二远端的机器人构件。柔性细长构件包括旋转运动传递装置,该旋转运动传递装置形成柔性细长构件的轴,用于将致动从第一端传播到在第二远端的机器人构件。
根据本发明的第六方面,提供了一种内窥镜系统。该内窥镜系统包括内窥镜、柔性细长构件和至少一个防扭结支撑件。内窥镜具有形成在其中的中空管,用于插入柔性细长构件。柔性细长构件具有用于操作控制的第一端和用于操作在内窥镜的远端的机器人构件的第二远端。柔性细长构件包括一个或多个柔性腱绳,以将操作控制从第一端提供到在第二远端的机器人构件。至少一个防扭结支撑件位于一个或多个柔性腱绳中的一个上,以在一个或多个柔性腱绳中的该一个上强加最小弯曲半径,该防扭结支撑件围绕一个或多个柔性腱绳中的该一个自由枢转。
根据本发明的第七方面,提供了一种内窥镜系统。该内窥镜系统包括内窥镜、柔性细长构件、至少一个机器人构件以及用于将至少一个机器人构件耦接到柔性细长构件的耦接装置。内窥镜具有形成在其中的中空管。柔性细长构件可插入穿过中空管,并且具有用于操作控制的第一端和第二远端,该第二远端具有与之耦接的相机。至少一个机器人构件位于柔性细长构件的第二远端,并且耦接装置将至少一个机器人构件耦接至柔性细长构件,同时将机器人构件约束到不对称的运动范围。
根据本发明的第八方面,提供了一种内窥镜系统。该内窥镜系统包括内窥镜、柔性细长构件、至少一个机器人构件和用于将至少一个机器人构件耦接至柔性细长构件的扭矩关节装置。内窥镜具有形成在其中的中空管。柔性细长构件可插入穿过中空管,并且具有用于操作控制的第一端和第二远端。该至少一个机器人构件位于柔性细长构件的第二远端,并且扭矩关节装置包括居中对准的滑轮。
附图说明
在附图的各个单独的视图中,相同的附图标记指代相同或功能相似的元件,并且其与下面的详细描述一起被并入说明书中并形成说明书的一部分,该附图用于示出各种实施例并解释根据本实施例的各种原理和优点。
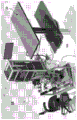
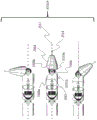
图1示出了提供根据本实施例的内窥镜系统的透视图的示意图。
图2示出了根据本实施例的图1的内窥镜系统的从属部分的示意图。
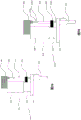
图3示出了根据本实施例的位于图1的内窥镜系统的主要部分和从属部分中的一个或两个中的模块的框图。
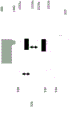
图4示出了根据本实施例的阀控制器箱的透视图。
图5示出了根据本实施例的图1的内窥镜系统的机器人构件的激活和/或校准状态。
图6示出了根据本实施例的来自内窥镜系统的主要部分的远程可控阀控制箱的状态。
图7示出了根据本实施例的具有位置输入装置(PID)和显示器的图1的内窥镜系统的主要部分的透视图。
图8示出了根据本实施例的位置输入装置(PID)之一的放大图。
图9A和9B示出了根据本实施例的图1的内窥镜系统的对接站的部件的示意图。
图10和11A示出了根据本实施例的图1的内窥镜系统的对接站的示意图。
图11B和11C示出了用于实现根据本实施例的图1的内窥镜系统的对接站的部件的结构。
图11D至11G示出了用于实现根据本实施例的图1的内窥镜系统的对接站的部件的另一结构的各种视图。
图12A示出了根据本实施例的在图9A、9B、10和11A的可平移壳体内的平移机构的第一实施方式的侧视图。
图12B示出了根据本实施例的在图9A、9B、10和11A的可平移壳体内的平移机构的第二实施方式的侧视图。
图13示出了根据本实施例的用于控制图1的内窥镜系统的柔性细长构件的关节的电动机箱的侧视图。
图14示出了根据本实施例的图1的内窥镜系统的柔性细长构件的示意图。
图15示出了根据本实施例的图14的柔性细长构件的轴的截面图。
图16示出了根据本实施例的圆形线圈护套的一部分的截面图。
图16a示出了根据本实施例的柔性细长构件的详细截面图。
图17示出了根据本实施例的矩形线圈护套的一部分的截面图。
图18示出了根据第二实施例的图16的圆形线圈护套的一部分的截面图。
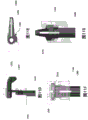
图19示出了根据本实施例的用于内窥镜系统的电线的防扭结支撑件的示意图。
图20a和20b示出了根据本实施例的内窥镜系统的机器人构件之一的特写截面图。
图21a示出了根据本实施例的滑轮的侧视图。
图21b示出了根据本实施例的具有滑轮的扭矩关节的透视图。
图21c和21d示出了根据本实施例的具有滑轮的扭矩关节的截面。
图21e示出了根据本实施例的柔性细长构件的管腔的截面,并且图21f示出了图21e的截面沿顺时针方向旋转90度。
图22示出了根据本实施例的柔性细长构件的典型铰链关节的截面图。
图23a示出了根据本实施例的图12A和12B的典型平移机构的透视图,而图23b示出了图23a的透视图的特写图。
图23c、23d和23e示出了根据本实施例的平移机构的实施方式的截面图。
图24a示出了根据本实施例的内窥镜对接系统的典型的电动高度调节机构的透视图。
图24b示出了根据本实施例的图2的从属部分的第一实施方式的侧视图。
图24c示出了根据本实施例的当内窥镜对接系统处于其最高位置时具有分离的电磁制动器的第一实施方式的侧视图。
图24d示出了根据本实施例的当内窥镜对接系统处于其最高位置时具有接合的电磁制动器的第一实施方式的侧视图。
图24e示出了根据本实施例的当内窥镜对接系统处于其最低位置时具有分离的电磁制动器的第一实施方式的侧视图。
图24f示出了根据本实施例的当内窥镜对接系统处于其最低位置时具有接合的电磁制动器的第一实施方式的侧视图。
图24g示出了根据本实施例的图2的从属部分的第二实施方式的侧视图。
图24h示出了根据本实施例的在内窥镜对接系统处于其最高位置时的第二实施方式的侧视图。
图24i示出了根据本实施例的在内窥镜对接系统处于其最低位置时的第二实施方式的侧视图。
通过以下书面描述,仅作为示例并结合附图,本领域的普通技术人员将更好地理解本发明的示例实施例,并且对本领域的普通技术人员而言,本发明的示例实施例将容易显而易见。附图不一定按比例绘制,而是通常将重点放在说明本发明的原理上。
具体实施方式
在下面的描述中,参照附图描述了各种实施例,其中贯穿不同的视图,相似的附图标记通常指代相同的部分。
图1是提供内窥镜系统10的透视图的示意图。内窥镜系统10具有主要或主要侧部分100和从属或从属侧部分200,主要或主要侧部分100具有主要侧元件,从属或从属侧部分200具有从属侧元件。
参考图2,主要部分100和从属部分200被配置为彼此进行信号通信,使得主要部分100可以向从属部分200发出命令,并且从属部分200可以响应于主要部分100的输入精确地控制、调遣、操纵、定位和/或操作:(a)由从属部分200的输送内窥镜320承载或支撑的一组机器人构件410,该输送内窥镜320具有柔性细长轴;(b)由输送内窥镜320承载或支撑的成像内窥镜或成像探针构件;(c)用于执行空气或CO2吹入、水冲洗和流体抽吸的阀,这些阀耦接到由输送内窥镜320承载或支撑的通道管;和(d)用于外科手术的探针,外科手术通过电灼(使用电灼术)或激光作用(使用激光)中的一种或多种进行,例如,组织操纵或回缩、切口、解剖和/或止血,其中,连接到探针的电线由探针或输送内窥镜320承载或支撑。主要部分和从属部分100、200还可被配置为使得从属部分200可在机器人构件410被定位、操纵或操作时向主要部分100动态地提供触觉/触感反馈信号(例如,力反馈信号)。这样的触觉/触感反馈信号与在机器人构件410驻留的环境(例如手术台20上的生物体)内施加在机器人构件410上的力相关或对应。机器人构件410(参见图14)指可以抓取和提起组织的臂或抓手。机器人构件可以可选地安装有(host)电灼探针以解剖组织或止血。臂或抓手的致动是通过电缆对(也称为“腱绳(tendon)”)实现的,在图16、17和18中用附图标记1604表示其中的一个。电缆/腱绳可以通过护套进行保护,该护套在图16、图17和图18中未示出,但在图16a的截面图中使用附图标记1602表示为内部地位于轴(在图9A、9B和14中使用附图标记1402表示)内。可以通过保护罩1606隔离的轴用于平移和/或旋转臂或抓手。该轴(电缆对位于内部)和保护罩称为柔性细长构件1600(请参见图16a)。电缆对用于移动臂或抓手的关节,从而使机器人构件410可以抓取或解剖组织,或用于其他医疗目的。用于电缆对的致动器容纳在可平移电动机壳体中(请参见图9A、9B、10、11A、12A和12B中的附图标记926),该可平移电动机壳体可操作地耦接至适配器(参见图9A,9B和10中的附图标记906)。该适配器906、柔性细长构件1600和机器人构件410被称为手术器械,其中,机器人构件410位于手术器械的远端。
图2是图1的内窥镜系统10的从属部分200的示意图。从属部分200具有被配置成用于承载至少一些从属部分元件的患者侧推车、支架或机架202。患者侧推车202具有可将输送内窥镜320拆卸(例如,安装/对接和解安装/解对接)到的对接站500和相关的阀控制器箱348。患者侧推车202通常包括轮子204以促进从属部分200的易于搬运性和定位。
图3示出了位于图1的内窥镜系统10的主要部分100和从属部分200中的一个或两个中的模块的框图。图2的输送内窥镜320的空气吹入、水冲洗和流体抽吸能力与这些模块相关。阀控制器箱348包含几个模块,其中,阀控制器箱348位于图2所示的患者侧推车202上,或者与患者侧推车202分离但在患者侧推车202附近。其余模块,安全系统模块352和运动控制系统模块354位于患者侧推车202上或附接到位于患者侧推车202上的从属侧元件,例如机器人构件410耦接至作为对接站500的一部分的可平移壳体926。
位于阀控制器箱348中的模块包括阀箱印刷电路板组件(PCBA)364、紧急停止PCBA362、推车电源输出端口356(额定值为12V)、阀控制器箱电源模块358(额定值为24V)、电磁阀360、紧急开关366、推车电源开关368和空气/水电源开关370。
阀箱PCBA 364控制电磁阀360以实现输送内窥镜320的空气吹入、水冲洗和流体抽吸功能。紧急停止PCBA 362控制安全系统模块352,安全模块352进而控制运动控制系统模块354。运动控制系统模块354控制机器人构件410。
阀控制器箱348具有AC输入电源端口372,AC输入电源端口372包括AC至DC转换器,以向推车电源输出端口356和阀控制器箱电源模块358提供DC电源。推车电源输出端口356和阀控制器箱电源模块358分别向紧急停止PCBA 362和阀控制器箱电源模块358供电。当推车电源开关368和空气/水电源开关370分别打开时,向紧急停止PCBA 362和阀控制器箱电源模块358供电。
图3中所示的模块的电气系统被配置为具有连接与其余模块所属的电路电隔离的电磁阀360、阀控制器箱348、阀箱PCBA 364和空气/水电源开关370的电路。这种配置使得当紧急开关366被激活时,电磁阀360将继续操作。保持电磁阀360工作的原因是,根据医疗装置安全标准,紧急操作开关366的激活在外科手术过程中不应造成任何伤害。
在第一实施方式中,在推车电源输出端口356和阀控制器箱电源模块358均连接到AC输入电源端口372的情况下,推车电源输出端口356和阀控制器箱电源模块358在与AC输入电源端口372并联的电气连接上。紧急停止PCBA 362的操作也由紧急开关366控制,因为紧急开关366的激活会切断机器人构件410的电源。这使机器人构件410停止操作,而阀控制器箱电源模块358保持被供电,以允许电磁阀360保持操作。切断机器人构件410的电源可以采用以下几种方法之一来完成,例如:终止推车电源输出端口356与AC输入电源端口372之间的连接;终止推车电源输出端口356与安全系统模块352之间的连接;或终止安全系统模块352与运动控制系统模块354之间的连接。
在第二实施方式(未示出)中,推车电源输出端口向从属部分200(参见图2)的患者侧推车的所有部件供电。在该第二实施方式中,推车电源输出端口及其相关模块;以及阀控制器箱电源模块及其相关模块位于单独的外壳中。这两个外壳中的每个外壳都独立连接到AC输入电源端口,以实现电气隔离。
因为阀控制器箱电源模块358和推车电源输出端口356彼此独立,由于上述电气隔离,即使在切断推车电源输出端口356的电源后仍向阀控制器箱电源模块358供电。因此,电磁阀360保持操作,并且不影响空气吹入、水冲洗和流体抽吸功能,即,由输送内窥镜320承载或支撑并耦接至电磁阀360的通道管仍然将空气和水从电磁阀360运送到手术台20上的生物体,并将流体从生物体运送到电磁阀360。图3是提供了图4中所示的阀控制器箱348的透视图的示意图。
紧急开关366、推车电源开关368和空气/水电源开关370位于阀控制器箱348的前部。阀控制器箱348还具有与安全系统模块352连接的端口;位置输入装置(PID)702(见图7)已连接;以及显示器704(见图7)。
从图7中将认识到,PID 702位于内窥镜系统10的主要部分100处。PID 702允许机器人构件410的运动控制和电磁阀360(见图3)的空气吹入、水冲洗和流体抽吸功能的激活,同时还可以通过输送内窥镜320上的按钮来激活电磁阀360的空气吹入、水冲洗和流体抽吸功能。参考图8,其提供了一个PID 702的放大图,每个PID 702都具有带有两个按钮804的手柄802。将四个按钮804中的三个按钮中的每个按钮分配为提供对电磁阀360的空气吹入、水冲洗和流体抽吸功能之一的远程控制。第四个按钮用于激活机器人构件410的遥操作。这是为了确保用户是否打算在手术器械初始化和校准并且准备好通过PID 702被远程控制后开始遥操作。该遥操作开始命令可以通过另一个通道(例如脚踏板)发送。
在三个按钮804能够控制它们分别被分配的电磁阀360的空气吹入、水冲洗和流体抽吸功能之前,必须打开推车电源开关368和空气/水电源开关370,其中,按下按钮804将实现空气吹入、水冲洗和流体抽吸。这些在手术期间对于例如使胃肠道膨胀、清洁通过输送内窥镜320的柔性细长轴插入(或嵌入在输送内窥镜320的远端)的相机镜头以及去除不想要的流体(例如,来自清洁相机镜头的流体)之类的目的来说都是很重要的。
显示器704用于显示来自PID 702的可远程控制的阀箱控制器348的激活状态;机器人构件410的校准状态(参见图5中的附图标记504);通过输送内窥镜320上的按钮和/或PID 702上的三个按钮804指令的空气吹入、水冲洗和流体抽吸功能的激活状态。当将空气/水电源开关370打“开”(switch‘ON’)并激活阀控制器箱348的远程控制时(参见图6中的附图标记602,在显示器704中显示为“开(‘ON’)”),按钮804被激活以允许电磁阀360的远程控制。当取消激活阀控制器箱的远程控制时,显示器704将显示单词“关(‘OFF’)”以表示按钮804被取消激活。当按下按钮804和/或输送内窥镜320上的按钮时,显示器704也将更新,并且提供关于在任何时间点正在操作空气吹入、水冲洗和流体抽吸功能中的哪一个的指示。与显示由通过输送内窥镜320的柔性细长轴插入的相机镜头串流发送空气吹入、水冲洗和流体抽吸的图像的主显示器一起,显示器704为操作者提供了附加方式来验证在任何时间点正在操作空气吹入、水冲洗和流体抽吸功能中的哪一个。从图4至图8将认识到,阀控制器箱348提供了整合操作和监测空气吹入、水冲洗和流体抽吸功能的一种手段。
图9A示出了对接站500的部件,输送内窥镜320的近端920附接到该对接站500。
对接站500容纳电动机箱,该电动机箱包含致动器,该致动器用于旋转在其远端耦接至机器人构件410的柔性细长构件1600(见图14)。致动器还使机器人构件410铰接在细长构件1600的远侧末端。电动机箱位于可平移壳体926内,该可平移壳体926包括固定的下部930,可移动的上部928平移到固定的下部930上。可移动的上部928的尺寸大于固定的下部930的尺寸,使得固定的下部930和可移动的上部928具有伸缩结构布置,其中固定的下部930的一部分进入可移动的上部928中或从可移动的上部928撤回,这取决于可移动的上部928的平移方向。调节固定的下部930和可移动的上部928之间的间隙或自由游隙,以防止外来微粒进入容纳在可平移壳体926内的电动机箱中,同时电动机箱从内窥镜操作吸引的流体和微粒被保持在可平移壳体926的外部。
可移动的上部928平移以允许机器人构件410允许在手术台20上的生物体内的精细运动。
当可移动的上部928平移以将柔性细长构件1600进一步推入输送内窥镜320的柔性细长轴内的紧密配合的管腔中时,柔性细长构件1600存在屈曲的倾向,如图9A的虚线部分所示。此外,在平移期间保护罩1606可能被刮掉。在图9A中,通过使用防屈曲管924使屈曲最小化,柔性细长构件1600朝着输送内窥镜320进入电动机箱的下游,特别是在电动机箱的致动器与输送内窥镜320的近端920之间的暴露部分中。该防屈曲管924因此充当柔性细长构件1600的致动器和输送内窥镜320之间的引导构件。防屈曲管924通过支撑件932保持就位,支撑件932从输送内窥镜320对接到的基座934或可平移的电动机壳体926的固定的下部930的一部分延伸。此外,防屈曲管924在两端都张开,以利于在插入和移除期间机器人构件410的拉直,并防止在插入和抽出细长构件1600期间在防屈曲管924的端部的尖锐特征损坏保护罩1606,插入和抽出细长构件1600例如在外科手术结束时或在切换到不同功能的新手术器械时进行。防屈曲管924可以使用例如管道(pipe)的刚性结构来实现。
通过图9B、10和11A所示的实施方式,细长构件1600的这种屈曲被进一步最小化,如下文进一步所述。
图9B的第一实施方式通过使轴1402的至少一部分1420刚性,进一步减轻了上述屈曲和刮掉的问题,该部分1420邻近柔性细长构件1600附接到适配器906的位置。
图10和11A示出了对接站500的第二实施方式的示意图,输送内窥镜320的近端920附接到该对接站500,该第二实施方式旨在减轻图9A所示的柔性细长构件1600的屈曲。图10示出了处于完全延伸状态的可移动的上部928,而图11A示出了在平移期间的可移动的上部928。
虽然第一实施方式使用单个防屈曲管924,但是第二实施方式使用两个防屈曲管1024a和1024b。两个防屈曲管1024a和1024b具有伸缩结构布置,其中两个防屈曲管1024a和1024b之一具有比另一个更大的尺寸,其中当可平移壳体926的可移动的上部928平移时,较小尺寸的防屈曲管1024a、1024b进入较大尺寸的防屈曲管1024a、1024b。在图10和11A中,示出了防屈曲管1024a具有较小的尺寸并且用作内引导件,而防屈曲管1024b具有较大的尺寸并且用作外引导件。然而,防屈曲管1024a具有较大的尺寸,而防屈曲管1024b具有较小的尺寸也是可能的。应当理解,在图10和11A的第二实施方式中,使柔性细长构件1600的一部分刚性是可选的。
防屈曲管1024a由从可移动的上部928突出的支撑件1032a保持就位,而防屈曲管1024b由支撑件1032b就位,支撑件1032b从输送内窥镜320对接到的基座934或可平移的电动机壳体926的固定的下部930的一部分突出。当可移动的上部928平移时,防屈曲管1024a也将平移。通过消除防屈曲管1024b与细长构件1600之间的相对平移运动,减少了保护罩1606的磨损。类似于图9A和9B的防屈曲管924,二件式防屈曲管1024a和1024b在其端部张开以促进机器人构件410的移除。在第一和第二实施方式中,单个防屈曲管924和二件式防屈曲管1024a和1024b可从对接站500拆卸,以用于灭菌或用新的单个防屈曲管924和新的二件式防屈曲管1024a和1024b替换。
图9A、9B、10和11A示出了可平移壳体926具有基本竖直的取向,其中可移动的上部928进行竖直平移以移动柔性细长构件1600。但是,应当理解,可平移壳体926可以放置在其他取向(未示出)上,例如水平取向,其中可移动部分以大致水平的方式平移,或者倾斜的取向,其中可移动部分沿倾斜轴移动。
在使用过程中,防屈曲管1024a和1024b可能被弄脏。因此,有利的是,将它们设计成就位地被清洁和灭菌,或者将其设计为可移除以分别清洁,以便可以重复使用。替代地,防屈曲管1024a和1024b可以被设计为一次性使用并且可用后即弃,在这种情况下,为每个手术提供新鲜的管。
如果防屈曲管1024a和1024b被设计为可重复使用,则应将防屈曲管1024a和1024b的材料选择为确保与规定的清洁和灭菌方法相容。由于在世界不同地区使用各种各样的清洁和灭菌解决方案,因此在多种解决方案之间具有广泛相容性的材料是有利的。这样,例如不锈钢之类的抗腐蚀金属或抗腐蚀聚合物是防屈曲管1024a和1024b的良好材料选择。
如果防屈曲管1024a和1024b被设计成在清洁和灭菌期间可操作地与可平移电动机壳体926解除耦接,则促进防屈曲管1024a和1024b与可平移电动机壳体926的解除耦接的附接装置还应当促进清洁和/或灭菌的方便和彻底性。可以想到许多可能的可清洁的附接装置。例如,使用磁体的附接装置是特别有利的,因为它们可以被嵌入,从而留下光滑、平坦或凸出的外部轮廓,如果有缝隙的话则具有很少的缝隙,以便于用刷子清洁或用布擦拭。在一种实施方式中,支撑件1032a和1032b使用磁性材料制造或至少具有嵌入的磁体,其中支撑件1032a被焊接到防屈曲管1024a,并且支撑件1032b被焊接到防屈曲管1024b。
图11B和11C示出了使用例如机械装置之类的非磁性装置将防屈曲管附接到图9A、9B、10和11的可平移电动机壳体926的结构。在用于支撑件1032a和1032b(参见图10和11A)中的磁体可能会干扰可平移电动机壳体926内的磁性部件的操作的情况下采用非磁性装置。
如果防屈曲管1024a和1024b的磁性附接是不可能的,则可以使用图11B所示的动态接合机构1135。动态接合机构1135具有主体9,主体9具有第一开口,以容纳防屈曲管7的手柄6的至少一部分。主体9容纳机械止动装置,当要移除防屈曲管7以进行清洁时,该机械止动装置从主体9释放防屈曲管7。在图11B所示的实施方式中,机械止动装置包括杆2、抵接构件3、释放按钮1和偏压结构5。杆2可枢转地连接到抵接构件3和释放按钮1,并且被设置为沿着主体9的纵向部分移动。主体9具有第二开口,释放按钮1的一部分通过该第二开口从主体9突出;而释放按钮1的在主体9内的一部分耦接到偏压结构5。膜/不可渗透屏障4覆盖释放按钮1的从主体9突出的部分。
当通过膜/不可渗透屏障4操作释放按钮1时,沿箭头所示方向机械地激活抵接构件3,其中杆2向下拉动抵接构件3。焊接到防屈曲管7的手柄6在方向8上被释放。膜/不可渗透屏障4可以永久地附接到主体9或可移除以进行清洁和灭菌。
图11C示出了图11B所示的实施方式的变型。图11C的动态接合机构1135与图11B的动态接合机构1135相同。但是,代替使用膜/不可渗透屏障4,图11C的动态接合机构1135的主体9使用动态密封件4”来密封主体9以免弄脏。动态密封件4”可以是例如垫圈,其中按钮1从其突出的主体9的第二开口的壁与动态密封件4”的面对表面之间的摩擦接合阻止流体进入主体9内部空腔。
图11D至图11G描绘了防屈曲管1340耦接到防屈曲管保持器1342的又一变型,这可以通过使用防屈曲管1340的非永久塑性变形特性的机械手段来实现。防屈曲管1340包括顺应性特征/几何形状1344的一部分,其可以暂时变形以被装配到防屈曲管保持器1342的刚性部分中。可以在到电动机壳体面1350的垂直方向上将防屈曲管1340附接到防屈曲管保持器1342/从其分离或附接角1349可以与电动机壳体面1350成锐角。此外,在顺应性特征/几何形状1344上的三个或更多个侧面1346使防屈曲管1340的中心平面1348能够始终垂直于电动机壳体面1350。这允许将柔性细长构件插入穿过防屈曲管1340。
图12A示出了图9A、9B、10、11A和11B的可平移壳体926内平移机构的第一实施方式,而图12B示出了图9A、9B、10、11A和11B的可平移壳体926内平移机构的第二实施方式。在图12A和12B中,均未示出壳体。可平移壳体926的平移机构包括电动机(在图12A中使用附图标记1202和在图12B中使用附图标记1204表示)和丝杠机构或滚珠丝杠机构(在图12A中使用附图标记1222和在图12B中使用附图标记1224表示)。可平移壳体926的总高度926h受到可平移壳体926的平移机构(其包括电动机和丝杠机构或滚珠丝杠机构)的配置的影响,如下所述。
在图12A中,驱动平移运动的电动机1202安装在平台1220上,并与平台1220一起平移。随着平台1220平移,可平移壳体926的高度926h在完全缩回状态和丝杠机构1222的完全插入状态之间变化。
低高度926h是合乎需要的,因为它使机器人构件410的驱动机构对接在平台1220上容易。驱动机构的一部分,即器械适配器(其包含鼓,在其上在近端缠绕如图16、17和18所示的电缆对),在图9A、9B和10中示出并使用附图标记906表示。
在图12B的配置中,使平台1220平移的平移电动机1204安装在固定支架上。平台1220(可移动的上部928的壳体放置在其上)通过安装到构件1226上而被允许平移,该构件1226可旋转地耦接到由平移电动机1204驱动的丝杠机构1224。该构件1226可以是有孔的物体,例如螺母。
对于相同的平移运动范围,因为图12B的螺杆机构1224不平移,而图12A的电动机1202的螺杆机构1222在被电动机1202驱动时平移,所以图12B的可平移壳体926的高度926h将低于图12A的高度。
在输出轴底架1304和电动机输出轴1302之间存在缝隙。如果有流体进入这种缝隙,则将对输出轴1302周围的流体敏感部件造成危险或故障。
在流体敏感部件与输出轴底架1304的内壁之间在输出轴1302周围安装有防护件1306。该防护件排斥进入缝隙的流体,从而防止进入的流体与流体敏感部件接触。与使用轴封来防止这种流体进入相比,防护件1306是特别有利的,其中使用围绕输出轴1302的轴封会将摩擦引入轴旋转。
图14示出了柔性细长构件1600的示意图,该柔性细长构件1600在其远端耦接至机器人构件410,并且在其近端耦接至驱动机构。驱动机构包括一系列机械联动装置,这些机械联动装置将运动从致动器传递到适配器906(图9A和9B)。适配器906包含激励器,例如一个或多个鼓,电缆对围绕该鼓缠绕,以允许对机器人构件410进行运动控制,电缆对在柔性细长构件1600内延伸。在一种实施方式中,包含一个电动机轴(见图13的附图标记1302)的电动机箱用于旋转与机器人构件410连接的柔性细长构件1600。
由于柔性细长构件1600必须有效地将施加在其近端的致动传播到远端(例如旋转或平移),所以可以使用具有低旋转反冲(backlash)、良好的扭矩传递和低可压缩性的旋转运动传递装置(例如扭矩线圈)来实现其一部分(轴1402)。旋转运动传递装置还必须足够柔性以顺应输送内窥镜320。为了实现这些特性的混合,用于轴1402的旋转运动传递装置被设计为结合以下一个或多个特征。
第一特征使用扁平线圈,在图15中显示了其的一个部段1502。从截面图看,该线圈的较长部分W放置成使得当扁平线圈边缘到边缘地缠绕时,它形成轴1402的纵向长度。扁平线圈的示例横截面尺寸是0.2-0.4mm的宽度W和0.05-0.15mm的厚度T。纵向方向上相邻线圈之间的接触以低反冲传递压缩力。而且,对于给定的外径约束,较薄的层可使管腔空间更大,因此,对于线圈内给定数量的层,扁平线线圈优于圆形线圈。
第二特征使用根据第一特征制造的多层扁平线圈。缠绕方向在层之间交替,这使得最终的轴402以较小的反冲传递1:1的扭矩。例如,图15所示的截面切口1504具有三层4、5和6。内层4和外层6沿相同的方向缠绕,例如S旋转,也称为左旋缠绕方向,而中间层5沿另一方向缠绕,Z旋转,也称为右旋缠绕方向。每层包括螺旋缠绕的8-12股扁平线,这导致线圈的外径范围为3mm至6mm。
交替层之间的缠绕方向以如下方式导致近端和远端之间具有低反冲的1:1旋转。当沿给定方向传递扭矩时,一个或多个左旋缠绕的线圈将通过膨胀其直径而引入旋转反冲。在相同的扭转方向下,一个或多个右旋缠绕的线圈将通过减小其直径而引入旋转反冲。当交替缠绕方向的线圈彼此层叠在内部时,可以防止这种旋转反冲来源。在上面的示例中,左旋缠绕线圈的径向膨胀被下一外层中的右旋缠绕线圈的径向压缩所抵消。至少需要三层交替的缠绕线圈来消除在两方向上的旋转反冲的这种来源。
图16示出了根据已知实施方式的圆形线圈护套的一部分的截面图,其中圆形线圈护套具有圆形线圈1602,该圆形线圈具有穿过其管腔延伸的电缆1604。这种圆形线圈护套用于传递压缩力。在线圈1602管腔内部延伸的电缆1604在作用反作用对中提供张力。为了防止张力的传递损失,期望这两个部件之间的低摩擦。在导管对线圈1602的护套施加大量弯曲的情况下,即使施加到线圈1602的护套的很小的压缩力也将导致其屈曲/扭结,从而导致线圈护套的管腔变窄。由于线圈护套的屈曲/扭结而导致的管腔变窄导致与电缆1604的摩擦增加,从而降低了电缆1604的力传递效率。
图16a示出了柔性细长构件1600(如图14所示)的详细截面图,柔性细长构件1600包括保护罩1606、轴1402、多个圆形线圈护套1602和包含在每个圆形线圈护套1602内的电缆1604。
为简单起见,在图16中仅示出了线圈的四个节距1a-1d。1b上的压缩力4a、4b来自相邻的节距1a和1c。当圆形线圈护套弯曲时,该压缩力具有向上的分量。由于线圈1602保持其原始形状的趋势,所以存在抵消的向下力5。电缆1604在1b上还施加小的向下力6。但是,当来自4a、4b的压缩力足够大时,1b与1a和1c交界的圆形表面会形成不稳定的平衡,其中1b在向上方向上的增量滑移会导致相邻节距之间的接触角发生明显变化。这又导致相邻节距之间的压缩反作用力4a、4b的方向明显改变。反过来,这在良性循环中会导致1b更大的向上侧滑,并导致线圈永久变形,称为屈曲/扭结。这种不稳定性会沿着护套的长度传播,如图18所示。
图17示出了根据图16的圆形线圈护套的改进的矩形线圈护套的一部分的截面图。矩形线圈护套具有线圈1702,该线圈具有基本上矩形的横截面。与图16的圆形线圈护套相似,电缆1604延伸穿过图17的矩形线圈护套的管腔。
对图16的改进在于,代替具有圆形横截面的线圈线,而使用具有矩形横截面的线圈线1702。当将其缠绕成护套时,护套的每个节距与相邻的节距具有更稳定的接触,使得线圈上的外部弯曲和压缩力不太可能导致交替的节距在横向滑移。矩形横截面在线圈护套的方向上较短。这增加了节距密度,这导致每个节距的弯曲量较小,因此在相同的弯曲半径下由于弯曲引起的横截面中的引起的应变低于较低节距密度的线圈的引起的应变。如果由弯曲力和压缩力引起的应变保持在材料的屈服应变以下,则线圈1702将不会永久屈曲/扭结。线圈3b向上的轻微移动不会改变来自线圈3a和3c的压缩力的迎角(angle of attack)。在较小节距的情况下,迎角的改变被进一步减小,从而在保持相同弯曲特性的同时,比圆形线圈1具有更好的防屈曲性能。
矩形线圈护套的特定实施例是当横截面具有相等的尺寸时,即,它是正方形线圈护套。这没有提供增加节距密度的益处,但是仍然提供了抵抗屈曲的更多稳定性,因为来自线圈3a和3c的压缩力在3b上的迎角不会随侧向挠度而改变。另外,正方形横截面的线圈的截面积比等节距的圆形线圈的圆形横截面积大。这使其更能抵抗侧向剪切力。
图18示出了图16的圆形线圈护套的一部分的类似截面图。在该图中,线圈护套1802由超弹性材料制成。超弹性材料的一个例子是镍钛诺,一种镍和钛的合金。镍钛诺具有独特的材料特性,因为它可以通过加载而在很大程度上变形,但在移除负载后仍能够恢复其原始形状。在图18中,在电缆1604上的高负载期间,镍钛诺圆形线圈护套1802被高度压缩,因此经受暂时的屈曲。这增加了电缆1604上的摩擦(如图16和图16a所示),并降低了效率。在线圈线1802去除负载/不弯曲后,线圈线1802恢复到其原始形状,而不是保持塑性变形的不规则形状。因此,线圈护套1802可以在大多数时间内以最大效率工作,而效率不会随时间降低。
图19示出了用于电线的防扭结支撑件1902的示意图。防扭结支撑件可以位于机器人构件410处,并且可以在不影响旋转关节功能的情况下增加线1604(参见图14和图16a)的防扭结性。可以理解,除了腱绳/电缆1604,轴还承载电线(为简单起见未在图16a中示出)。如图19所示,本发明的防扭结支撑件1902通过具有弯曲的入口1906来在线1604上强加最小弯曲半径。最小弯曲半径是通过实验确定的,使得线在装置的预期寿命内不会经历弯曲疲劳故障,同时使装置内部容纳线弯曲所需的空间最小化。防扭结支撑件1902包括允许其在销1910a和1910b或类似的非销形结构上自由枢转的支撑件1908。这可以允许线1604达到其能量上最稳定的状态,即具有最低的总弯曲量。防扭结支撑件1902的旋转轴线可以与机器人构件410的关节运动轴线大致位于同一位置,以使得线在机器人构件410的运动的整个关节运动范围内不会经受明显的拉伸或压缩力。
图20a示出了根据示例实施例的机器人构件410之一的特写截面图。机器人构件410可以具有不对称的运动范围,从而使得相机的可见度增强,这可以导致器械的更安全的操作。通过使用机械限位件2008a、2008b、2010a、2010b,允许机器人构件410的关节2006与朝着相机轴线的方向上相比,在远离相机轴线的方向上以较小角度运动。替代实施例可以涉及使用软件和位置感测来实现相同的效果。
在示例实施例中,图20a的机器人构件410被示出为具有三个阶段的关节运动,即处于中立位置(0°),中立位置逆时针90°和中立位置顺时针45°。基部关节2002是固定的并且平行于参考轴线2012。远侧关节2004绕铰链2006旋转。上硬限位件2008a和2008b提供允许的最大向上旋转程度。在所示的示例实施例中,允许绕中立位置最大逆时针旋转90°。与硬限位件2008a和2008b的表面相比,下硬限位件2010a和2010b的表面可以具有不同的角度,从而限制了向下旋转的最大程度。在所示的示例实施例中,允许绕中立位置最大顺时针旋转45°。跨多个关节的不对称的累积效应可以确定机器人构件410的远端处的工作空间。可以优化关节之间的不对称以提供远端执行器2014的最大可见性。
在示例实施例中,结合与机器人构件410相邻的相机2016,在图20b中示出了上述概念的实现。机器人构件410基本上平行于相机的观察方向,但是具有小侧向偏移2020。当使机器人构件410远离相机2016关节运动时,机械限位件2010a、2010b限制了远端执行器2014的运动不会走得太远而超出视觉范围。
内窥镜系统可以包括位于机器人器械处的扭矩关节,该扭矩关节利用具有节省空间的钣金结构部件的居中对准的滑轮,并且不使用中心销。这种扭矩关节占据的横截面空间尽可能小,但通过使滑轮居中对准,可以针对给定的缆索力提供最大的扭矩量,从而可以针对机器人构件410的给定直径最大化滑轮的直径。另外,该扭矩关节使穿过元件可以沿着滑轮的两侧畅通无阻地铺设。对可比较的制造成本来说,与其他安装解决方案相比,使用钣金安装居中对准的滑轮并将其扭力传递到扭矩关节的其余部分,可以使壁更薄,因此可以获得更紧凑的滑轮结构。由于滑轮不再直接连接至铰链关节,因此在组装期间可以暂时使用定位销,以保持滑轮的旋转轴线与扭矩关节的旋转轴之间的良好对准。
图21a示出了滑轮2102的侧视图,而图21b示出了具有滑轮2102的扭矩关节的透视图。滑轮2102可以包括三角形钣金安装支架2116a和2116b。滑轮2102还可包含有助于保持滑轮线的特征2118a-2118d。钣金部件2106可以帮助约束致动线2108,并且还可以在结构上将滑轮2102固定到远侧关节部分2110。铰链关节2104a和2104b为远侧关节部分2110提供旋转点并且与滑轮轴向对准。图21c和21d示出了具有滑轮2102的扭矩关节的横截面。在图中,由于滑轮2102居中对准,管腔2112被一分为二。
图21e示出了根据示例实施例的管腔2112的横截面,并且图21f示出了顺时针旋转90度的相同横截面。在图中,该配置为滑轮2102保留了空间,而不会妨碍通过元件2114(在图21e中未示出)。居中对准的滑轮允许其直径尽可能大,这增加了关节的机械优势。没有中心铆销意味着管腔2112不被过度地切割,要不将减小可用于通过元件2114的管腔横截面面积。本发明的扭矩关节还可允许通过元件2114在关节铰接时经历程度较小的弯曲。
图22示出了典型的铰链关节2202的截面图。关节2202可包括近侧部分2204和远侧部分2206,并且可定位在机器人构件410处(如图14所示)。旋转发生在近侧部分2204和远侧部分2206重叠的点附近。在所示的优选实施例中,可以使用两个单独的铆销2208a和2208b来约束这两个部分2204、2206。这可以使得能够保留内部管腔空间2210用于其他用途。
在销2208a、2208b与关节部分2204和2206之间存在间隙配合,该间隙配合允许关节平滑旋转。然而,这样的间隙可能阻止容易对准两个部分2204、2206的枢转轴线。如果这些部分未对准,则可能难以在极限运动范围处运动。因此,销2208a、2208b可以通过桥接插入件2212彼此对准。因此,可以提供一种方法,以通过在组装期间使用桥接插入件来确保两个离散的铰链关节的轴向对准。该桥接插件可以成为关节的一部分,也可以拔出。在图22所示的实施例中,插入件2212可以是穿过铆销2208a、2208b中的孔的杆,并且因此可以确保所述部分对准。在将铆销2208a、2208b焊接到近侧部分2204以形成保留的关节之后,将桥接插入物2212移除。
在内窥镜系统中,在平移致动器用于将机器人构件410平移入和平移出输送内窥镜320(参见图2,其中将机器人构件410通过其近端920(参见图9A)引入输送内窥镜320)的情况下,当从平移致动器断开电源时,平移致动器保持固定就位是有利的。在平移致动器在预期的外力如重力或其他力的作用下可向后驱动的系统中,当从致动器断电时,机器人构件410将移入或移出输送内窥镜320。当机器人构件410的无指令的平移运动导致机器人构件410无意地与敏感组织接触时,这是特别不利的。因此,有利的是,当断电时,内窥镜系统的平移致动器是不可向后驱动的。
图23a示出了典型的平移机构的透视图,而图23b示出了典型的平移机构的透视图的特写图。典型的平移致动器通常采用低摩擦驱动机构,例如滚珠丝杠2322,以将电动机2302的旋转运动转换为致动器的线性运动2326。滚珠丝杠2322在工业上是优选的,因为消耗了低摩擦力,这对于给定的输入命令给出可重复的运动。典型的滚珠丝杠2322包括滚动接触元件而不是滑动接触元件,并且由于低磨损率而具有长使用寿命。然而,典型的滚珠丝杠2322具有至少两个特性,这使得它们不适合用作内窥镜系统中的平移致动器。首先,滚珠丝杠2322的低摩擦滚动元件使其可在通常低于预期外部负载的力下向后驱动。其次,减小滚珠丝杠2322的节距会增加其向后驱动阻力。与其他传动元件相比,滚珠丝杠节距可以降低的量受到限制。这是因为必须在相邻的节距之间保留足够的空间以容纳滚动元件及其往复的引导座圈。
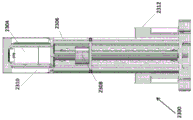
图23c、23d和23e示出了可改善当前工业线性致动器的向后驱动性的平移机构2300的实施方式的截面图。如图23c至图23e所示,内窥镜系统平移机构2300包括旋转电动机2304和丝杠(lead screw)2306,以将电动机2304的旋转运动转换为机器人构件410(参见图2)的平移运动。在该实施例中使用丝杠2306,因为与具有低摩擦滚动元件接触的滚珠丝杠相比,由于丝杠2306和丝杠螺母2308之间的滑动接触,其固有地具有更大的摩擦力。另外,丝杠2306可具有比等效尺寸的滚珠丝杠更低的节距,从而赋予丝杠2306更大的向后驱动阻力。平移机构2300还可以包括用于封闭电动机2304的固定电动机平台2310和支撑平移机构2300的电动机平台基座2312。图23d和23e示出了随着电动机2304旋转丝杠2306而竖直平移的丝杠螺母2308的各种位置。
在图中未示出的替代实施例中,平移机构2300可以包括旋转电动机和滚珠丝杠,使得电动机具有足够的内齿轮减速以提供所需的向后驱动阻力。在平移机构2300中不能接受丝杠的较高摩擦和较低使用寿命的情况下,这样的实施例可能是有利的。这种电动机的优选实施例将包括行星齿轮减速或谐波传动,这两者都允许在紧凑的尺寸中实现较大的齿轮减速比。
平移机构2300的另一个实施例可以包括电动机、滚珠丝杠和电动摩擦装置,当从电动机断开电源时,该电动摩擦装置自动接合以停止致动器的运动。当丝杠的较高摩擦和较低使用寿命不可接受时,并且在电动机内的大齿轮减速将导致不可接受的缓慢平移速度的情况下,这样的实施例可能是有利的。这种摩擦装置的优选实施例是连接到电动机轴或滚珠丝杠的旋转电磁制动器。
内窥镜对接系统可以包括对接站500、输送内窥镜320和相关的阀控制器箱348(如图2所示)。调节内窥镜对接系统的高度以适应不同的患者台高度以及不同的临床医生高度是有利的。另外,一旦将内窥镜对接系统调节至期望的高度,则将其固定也是有利的。出于安全原因,内窥镜对接系统必须在所需高度保持稳固,以避免在内窥镜检查期间发生突然和意外的变化。
当前有多种简单的机构可以为内窥镜对接系统提供可调节高度功能。这种机构的一个示例包括具有不同高度的多个螺栓位置的简单的螺栓接口,该接口提供可调节性,但是可能需要使用工具来进行调节,并且在调节机构时需要额外的人来支撑该机构的重量。这使得在手术中调节螺栓接口麻烦且不切实际。可以采用其他可调节高度机构,例如机械操作的竖直螺杆调节器或机械操作的液压提升缸。但是,由于将运动传递到所需位置需要大量机械联动装置,因此将这些装置的机械控制件置于附接的内窥镜的控制主体上的用户的手位置附近或用户的脚附近不切实际。这意味着用户必须停止正在执行的操作,然后移至控制件的位置,然后移回其原始位置以评估调节是否足够。这给用户增加了延迟和不便。
另一解决方案可包括使用电动致动器,以基于来自用户经由控制接口的输入来调节内窥镜对接系统的高度。图24a示出了内窥镜对接系统2402的典型的电动高度调节机构的透视图。该机构中的电致动器2404必须可靠地支撑和操纵内窥镜对接系统2402的整个重量。由于内窥镜对接系统2402较大的尺寸和重量,电致动器2404的成本也很高。因此,即使电动致动器2404在用户控制件的位置上提供了更大的自由度,但是也增加了内窥镜系统的巨大成本。
这里公开了可以消除现有机械调节机构的不便并且可以提供比电致动器系统更低的成本的机构。公开的机构可以包括重量补偿装置和电动锁定装置。重量补偿装置可以抵消内窥镜对接系统的大部分重量。其余的重量可灵活悬挂,以便易于竖直调节而不会拉紧。重量补偿装置还可包括高度调节机构,以调节内窥镜对接系统的高度。
电动锁定装置可包括控制器和用户控制件。作为电子设备,用户控制件可以位于手或脚位置附近,例如参照图7,在PID 702或主要部分的脚踏板附近。首选的用户控制件包括手动按钮或脚踏开关。设备默认为锁定状态,并且仅在用户控制件的激活期间被解锁。
图24b示出了根据第一实施方式的图2的从属部分200的侧视图,该从属部分200包括重量补偿装置和电动锁定装置。如图24b所示,从属部分200包括患者侧推车202、内窥镜对接系统2406、高度调节机构2408和线性电磁制动器2410。内窥镜对接系统2406包括对接站500和输送内窥镜320(如图2所示)。在该实施方式中,高度调节机构2408可包括恒力弹簧,内窥镜对接系统2406直接悬挂在该恒力弹簧上。定制恒力弹簧的力,使其基本类似于内窥镜对接系统2406最重配置的重量。
如图24c所示,内窥镜对接系统2406在线性电磁制动器2410分离的情况下处于其最高位置。这允许通过高度调节机构2408来调节内窥镜对接系统2406的高度,同时保持内窥镜对接系统2406的重量。
图24d示出了内窥镜对接系统2406处于其最高位置,其中线性电磁制动器2410被接合。在将内窥镜对接系统2406调节到期望的高度之后,接合的线性电磁制动器2410牢固地固定内窥镜对接系统2406,以避免在内窥镜检查期间突然和意料之外的变化,这可能危及患者。更具体地,线性电磁制动器2410可以利用摩擦直接接合内窥镜对接系统2406,以防止内窥镜对接系统2406的竖直运动。
从属部分200可以包括线性电磁接合花键或棘齿(图中未示出),该线性电磁接合花键或棘齿使用互锁部件直接接合内窥镜对接系统2406,以防止内窥镜对接系统2406竖直运动。互锁部件的示例包括致动器、齿轮和/或阀。图24e和24f分别示出了当内窥镜对接系统2406处于其最低点时在分离位置和接合位置的电磁制动器2410。
图24g示出了根据第二实施方式的图2的从属部分200的侧视图,该从属部分200包括重量补偿装置和电动锁定装置。如图24g所示,从属部分200包括患者侧推车202、内窥镜对接系统2406和高度调节机构2408。内窥镜对接系统2406包括对接站500和输送内窥镜320(如图2所示)。
在该第二实施方式中,高度调节机构2408可以是配重和滑轮系统,其中,配重2412的重量与内窥镜对接系统2406的重量基本相似。细长柔性构件2414将配重2412以这样的方式连接至内窥镜对接系统2406——使得细长柔性构件2414向上引导并跨过滑轮2416。细长构件2414可以是无弹性的,并且可以由防滑材料制成,从而当对接系统2406进行竖直运动时在细长构件2414与滑轮2416之间没有滑动。滑轮2416和细长柔性构件2414的优选实施例可以包括齿轮齿带和齿轮齿滑轮或者链轮和链条。另外,高度调节机构2408可以包括旋转电磁制动器(未示出),该旋转电磁制动器被施加到细长构件2414接合到的滑轮2416上。图24h和24i分别分别示出了当内窥镜对接系统2406处于其最高位置和最低位置时的配重和滑轮系统的实施方式。
本领域技术人员将理解,如实施方式所示,可以对本发明进行多种变化和/或修改,而不脱离如广泛描述的本发明的精神或范围。因此,这些实施方式在所有方面都被认为是说明性的而非限制性的。
Claims (40)
1.一种内窥镜系统,包括:
内窥镜,该内窥镜具有形成在其中的中空管,其中,所述内窥镜具有可耦接到对接站的第一端,并具有第二远端;
柔性细长构件,该柔性细长构件用于插入穿过所述中空管,其中,所述柔性细长构件具有用于操作控制的第一端和用于操作在所述内窥镜的远端的机器人构件的第二远端;
一个或多个致动器,该一个或多个致动器在所述柔性细长构件的第一端可耦接到所述柔性细长构件,所述一个或多个致动器能够在平行于所述中空管的中心轴线的方向上平移,以在操作期间允许所述柔性细长构件的第二远端的精细运动;和
防屈曲管,该防屈曲管在所述内窥镜的第一端相对于所述中空管布置,所述柔性细长构件在所述一个或多个致动器的下游插入穿过所述防屈曲管,以防止所述柔性细长构件在所述一个或多个致动器平移期间屈曲。
2.根据权利要求1所述的内窥镜系统,其中,所述防屈曲管位于所述一个或多个致动器与所述内窥镜的第一端之间。
3.根据权利要求1所述的内窥镜系统,还包括将所述防屈曲管耦接到所述一个或多个致动器的一个或多个支撑件。
4.根据权利要求3所述的内窥镜系统,其中,所述致动器被容纳在电动机壳体内,所述一个或多个支撑件将所述防屈曲管耦接到所述电动机壳体。
5.根据权利要求4所述的内窥镜系统,其中,所述一个或多个支撑件包括用于将所述防屈曲管耦接到所述电动机壳体的磁性装置或机械装置。
6.根据权利要求4所述的内窥镜系统,其中,所述电动机壳体包括固定部分和可平移部分,所述可平移部分在平行于所述中空管的中心轴线的方向上平移所述一个或多个致动器,并且其中,所述一个或多个支撑件的至少第一部分将所述防屈曲管耦接到所述电动机壳体的固定部分。
7.根据权利要求6所述的内窥镜系统,其中,所述防屈曲管包括以伸缩结构布置而被布置的两个或更多个管,使得所述两个或更多个管中的第一个具有比所述两个或更多个管中的第二个大的直径,并且其中,所述一个或多个支撑件的第一部分将所述防屈曲管的所述两个或多个管中的所述第一个耦接到所述电动机壳体的固定部分,并且所述一个或多个支撑件的第二部分将所述防屈曲管的所述两个或更多个管中的所述第二个耦接到所述电动机壳体的可平移部分。
8.根据权利要求6所述的内窥镜系统,其中,所述防屈曲管包括以伸缩结构布置而被布置的两个或更多个管,使得所述两个或更多个管中的第一个具有比所述两个或更多个管中的第二个小的直径,并且其中,所述一个或多个支撑件的第一部分将所述防屈曲管的所述两个或多个管中的所述第一个耦接到所述电动机壳体的固定部分,并且所述一个或多个支撑将的第二部分将所述防屈曲管的所述两个或更多个管中的所述第二个耦接到所述电动机壳体的可平移部分。
9.根据权利要求1所述的内窥镜系统,其中,所述防屈曲管在一端或两端张开。
10.根据权利要求1所述的内窥镜系统,其中,所述防屈曲管的至少一部分具有刚性结构。
11.根据权利要求10所述的内窥镜系统,其中,所述防屈曲管的具有刚性结构的所述至少一部分在所述柔性细长构件的第一端耦接到所述一个或多个致动器的情况下邻近所述柔性细长构件的第一端。
12.根据权利要求1所述的内窥镜系统,其中,所述防屈曲管由耐腐蚀金属或聚合物构成。
13.根据权利要求3所述的内窥镜系统,其中,所述一个或多个支撑件将所述防屈曲管可拆卸地耦接到所述一个或多个致动器。
14.一种内窥镜系统,包括:
内窥镜,该内窥镜具有形成在其中的中空管;和
柔性细长构件,该柔性细长构件用于插入穿过所述中空管,其中,所述柔性细长构件具有用于操作控制的第一端和用于操作在所述内窥镜的远端的机器人构件的第二远端,所述柔性细长构件包括一个或多个柔性腱绳以从所述第一端提供到在所述第二远端的机器人构件的操作控制,其中,所述一个或多个柔性腱绳中的每一个都具有线圈护套,该线圈护套包括缠绕在所述一个或多个柔性腱绳中的相应一个周围的具有基本上矩形的横截面的线。
15.根据权利要求14所述的内窥镜系统,其中,所述一个或多个柔性腱绳包括包裹在所述线圈护套中的一个或多个电缆对。
16.根据权利要求14所述的内窥镜系统,其中,所述线圈护套包括缠绕在所述一个或多个柔性腱绳中的相应一个周围的具有基本上正方形的横截面的线。
17.根据权利要求14所述的内窥镜系统,其中,所述线圈护套的基本上矩形的横截面在所述线圈护套的方向上较短。
18.根据权利要求14至17中的任一项所述的内窥镜系统,其中,所述线圈护套包括超弹性材料。
19.根据权利要求18所述的内窥镜系统,其中,所述超弹性材料是镍钛诺。
20.一种用于内窥镜系统的柔性细长构件,所述柔性细长构件具有用于操作控制的第一端,还具有第二远端,所述第二远端用于操作在该第二远端的机器人构件,所述柔性细长构件包括:
一个或多个柔性腱绳,以从所述第一端提供到在所述第二远端的机器人构件的操作控制,其中,所述一个或多个柔性腱绳中的每一个都具有线圈护套,该线圈护套包括缠绕在所述一个或多个柔性腱绳中的相应一个周围的具有基本上矩形的横截面的线。
21.根据权利要求20所述的柔性细长构件,其中,所述一个或多个柔性腱绳包括包裹在所述线圈护套中的一个或多个电缆对。
22.根据权利要求20所述的柔性细长构件,其中,所述线圈护套包括缠绕在所述一个或多个柔性腱绳中的相应一个周围的具有基本上正方形的横截面的线。
23.根据权利要求20所述的柔性细长构件,其中,所述线圈护套的基本上矩形的横截面在所述线圈护套的方向上较短。
24.根据权利要求20至23中的任一项所述的柔性细长构件,其中,所述线圈护套包括超弹性材料。
25.根据权利要求24所述的柔性细长构件,其中,所述超弹性材料是镍钛诺。
26.一种内窥镜系统,包括:
内窥镜,该内窥镜具有形成在其中的中空管;和
柔性细长构件,该柔性细长构件用于插入穿过所述中空管,其中,所述柔性细长构件具有用于操作控制的第一端,并且耦接到在所述内窥镜的远端的机器人构件以对其进行操作,所述柔性细长构件包括旋转运动传递装置,该旋转运动传递装置形成所述柔性细长构件的轴,以将致动从所述第一端传播到在所述第二远端的机器人构件。
27.根据权利要求26所述的内窥镜系统,其中,所述旋转运动传递装置包括扁平线圈,该扁平线圈边缘到边缘地缠绕。
28.根据权利要求27所述的内窥镜系统,其中,所述旋转运动传递装置包括多层边缘到边缘地缠绕的扁平线圈。
29.根据权利要求28所述的内窥镜系统,其中,多层扁平线圈中的每一层从所述多层扁平线圈中的相邻层交替变换缠绕方向。
30.一种柔性细长构件,该柔性细长构件具有用于操作控制的第一端并且耦接到在第二远端的机器人构件,所述柔性细长构件包括:
旋转运动传递装置,该旋转运动传递装置形成所述柔性细长构件的轴,用于将致动从所述第一端传播到在所述第二远端的机器人构件。
31.根据权利要求30所述的柔性细长构件,其中,所述旋转运动传递装置包括扁平线圈,该扁平线圈边缘到边缘地缠绕。
32.根据权利要求31所述的柔性细长构件,其中,所述旋转运动传递装置包括多层边缘到边缘地缠绕的扁平线圈。
33.根据权利要求32所述的柔性细长构件,其中,多层扁平线圈中的每一层从所述多层扁平线圈中的相邻层交替变换缠绕方向。
34.一种内窥镜系统,包括:
内窥镜,该内窥镜具有形成在其中的中空管;
柔性细长构件,该柔性细长构件用于插入穿过所述中空管,其中,所述柔性细长构件具有用于操作控制的第一端和用于操作在所述内窥镜的远端的机器人构件的第二远端,所述柔性细长构件包括一个或多个柔性腱绳以从所述第一端提供到在所述第二远端的机器人构件的操作控制,以及一个或多个电线以将电力从所述第一端提供到在所述第二远端的机器人构件;和
在所述一个或多个电线中的一个上的至少一个防扭结支撑件,以在所述一个或多个电线中的所述一个上强加最小弯曲半径,该防扭结支撑件围绕所述一个或多个电线中的所述一个自由枢转。
35.一种内窥镜系统,包括:
内窥镜,该内窥镜具有形成在其中的中空管;
柔性细长构件,该柔性细长构件用于插入穿过所述中空管,其中,所述柔性细长构件具有用于操作控制的第一端,并具有第二远端,该第二远端具有与之耦接的相机;
至少一个机器人构件,该至少一个机器人构件位于所述柔性细长构件的第二远端;和
用于将所述至少一个机器人构件耦接到所述柔性细长构件的耦接装置,该耦接装置将机器人构件约束到不对称的运动范围。
36.根据权利要求35所述的内窥镜系统,其中,相对于所述相机测量所述不对称的运动范围,使得与朝着所述相机的方向的运动角度相比,所述耦接装置将所述机器人构件在远离所述相机的方向上约束到较小的运动角度。
37.根据权利要求36所述的内窥镜系统,其中,所述耦接装置包括一个或多个机械硬限位件,与朝着所述相机的方向的运动角度相比,将所述机器人构件在远离所述相机的方向上约束到较小的运动角度。
38.根据权利要求35所述的内窥镜系统,其中,所述耦接装置包括位置感测装置和用于将机器人构件约束到非对称的运动范围的控制装置。
39.一种内窥镜系统,包括:
内窥镜,该内窥镜具有形成在其中的中空管;
柔性细长构件,该柔性细长构件用于插入穿过所述中空管,其中,所述柔性细长构件具有用于操作控制的第一端,并具有第二远端;
至少一个机器人构件,该至少一个机器人构件位于所述柔性细长构件的第二远端;和
用于将所述至少一个机器人构件耦接到所述柔性细长构件的扭矩关节装置,该扭矩关节装置包括居中对准的滑轮。
40.根据权利要求39所述的内窥镜系统,其中,所述扭矩关节装置包括一个或多个三角形的钣金安装支架。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SG10201709245X | 2017-11-09 | ||
| SG10201709245X | 2017-11-09 | ||
| PCT/SG2018/050563 WO2019093968A1 (en) | 2017-11-09 | 2018-11-09 | Endoscopy system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN111343896A true CN111343896A (zh) | 2020-06-26 |
Family
ID=66438868
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880072777.5A Pending CN111343896A (zh) | 2017-11-09 | 2018-11-09 | 内窥镜系统 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US11490973B2 (zh) |
| EP (1) | EP3681367A4 (zh) |
| JP (1) | JP2021502156A (zh) |
| CN (1) | CN111343896A (zh) |
| SG (1) | SG11202004166TA (zh) |
| WO (1) | WO2019093968A1 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115715702A (zh) * | 2023-01-09 | 2023-02-28 | 北京云力境安科技有限公司 | 一种软式内窥镜手术机器人系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090287043A1 (en) * | 2008-05-13 | 2009-11-19 | Olympus Medical Systems Corp. | Electric medical instrument fitting which is attached to a medical instrument holding device |
| US20120071895A1 (en) * | 2010-09-17 | 2012-03-22 | Stahler Gregory J | Anti-buckling mechanisms and methods |
| CN102596062A (zh) * | 2009-11-13 | 2012-07-18 | 直观外科手术操作公司 | 弯曲套管、机器人操纵器和具有被动柔性轴的手术器械 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002330923A (ja) * | 2001-03-07 | 2002-11-19 | Fuji Photo Optical Co Ltd | 内視鏡の可撓管及びその製造方法 |
| JP3748421B2 (ja) * | 2002-07-03 | 2006-02-22 | 株式会社ベクトロニクス | 医療用遠隔操作器具 |
| JP2007511247A (ja) * | 2003-05-19 | 2007-05-10 | ユーエスジーアイ メディカル, インコーポレイテッド | 管腔ツール展開システム |
| US8133171B2 (en) * | 2003-06-02 | 2012-03-13 | Karl Storz Endovision, Inc. | Wire spring guide for flexible endoscope |
| WO2005009227A1 (en) | 2003-07-29 | 2005-02-03 | Pentax Corporation | Internal treatment apparatus for a patient and an internal treatment system for a patient |
| JP2005081100A (ja) * | 2003-09-11 | 2005-03-31 | Olympus Corp | 内視鏡の可撓管 |
| US7822458B2 (en) * | 2005-05-19 | 2010-10-26 | The Johns Hopkins University | Distal bevel-tip needle control device and algorithm |
| JP5073415B2 (ja) * | 2006-08-28 | 2012-11-14 | オリンパスメディカルシステムズ株式会社 | 超音波内視鏡 |
| US8105230B2 (en) | 2007-07-09 | 2012-01-31 | Olympus Medical Systems Corp. | Medical system |
| JP5105605B2 (ja) * | 2008-01-22 | 2012-12-26 | 富士フイルム株式会社 | 内視鏡 |
| US9254123B2 (en) * | 2009-04-29 | 2016-02-09 | Hansen Medical, Inc. | Flexible and steerable elongate instruments with shape control and support elements |
| US8545515B2 (en) * | 2009-09-23 | 2013-10-01 | Intuitive Surgical Operations, Inc. | Curved cannula surgical system |
| CN102821669B (zh) | 2010-05-18 | 2015-03-25 | 奥林巴斯医疗株式会社 | 医疗装置 |
| US8523808B2 (en) * | 2011-11-18 | 2013-09-03 | Biosense Webster (Israel), Ltd. | Medical device control handle with independent self holding puller wire actuators |
| US20130190561A1 (en) * | 2012-01-10 | 2013-07-25 | Boston Scientific Scimed, Inc. | Steerable medical device having an imaging system |
| CN104955375B (zh) * | 2013-02-08 | 2017-06-30 | 奥林巴斯株式会社 | 操纵器 |
| JP6516736B2 (ja) * | 2013-10-15 | 2019-05-22 | コリンダス、インコーポレイテッド | ロボットカテーテルシステム、細長い医療装置の支持方法及び装置 |
| JP5897237B1 (ja) * | 2014-06-09 | 2016-03-30 | オリンパス株式会社 | 内視鏡 |
| WO2016037133A1 (en) * | 2014-09-05 | 2016-03-10 | Auris Surgical Robotics, Inc. | Method, apparatus, and a system for facilitating bending of an instrument in a surgical or medical robotic environment |
| CN105559888B (zh) * | 2014-10-30 | 2019-11-22 | 香港中文大学 | 机器人系统 |
| CA2969093A1 (en) * | 2014-11-29 | 2016-06-02 | Xact Robotics Ltd. | Insertion guide |
| US10265088B2 (en) * | 2014-12-19 | 2019-04-23 | Boston Scientific Scimed, Inc. | Medical retrieval systems and related methods |
| JP6109449B1 (ja) | 2015-05-18 | 2017-04-05 | オリンパス株式会社 | 可撓管及びその可撓管を用いる挿入機器及び内視鏡 |
| CN108135451B (zh) | 2015-10-28 | 2020-02-21 | 奥林巴斯株式会社 | 插入装置 |
-
2018
- 2018-11-09 CN CN201880072777.5A patent/CN111343896A/zh active Pending
- 2018-11-09 EP EP18875814.8A patent/EP3681367A4/en not_active Withdrawn
- 2018-11-09 US US16/757,223 patent/US11490973B2/en active Active
- 2018-11-09 JP JP2020524790A patent/JP2021502156A/ja active Pending
- 2018-11-09 SG SG11202004166TA patent/SG11202004166TA/en unknown
- 2018-11-09 WO PCT/SG2018/050563 patent/WO2019093968A1/en unknown
-
2022
- 2022-10-05 US US17/960,292 patent/US20230036248A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090287043A1 (en) * | 2008-05-13 | 2009-11-19 | Olympus Medical Systems Corp. | Electric medical instrument fitting which is attached to a medical instrument holding device |
| CN102596062A (zh) * | 2009-11-13 | 2012-07-18 | 直观外科手术操作公司 | 弯曲套管、机器人操纵器和具有被动柔性轴的手术器械 |
| US20120071895A1 (en) * | 2010-09-17 | 2012-03-22 | Stahler Gregory J | Anti-buckling mechanisms and methods |
| WO2012037506A2 (en) * | 2010-09-17 | 2012-03-22 | Hansen Medical, Inc. | Robotically controlled steerable catheters |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115715702A (zh) * | 2023-01-09 | 2023-02-28 | 北京云力境安科技有限公司 | 一种软式内窥镜手术机器人系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3681367A1 (en) | 2020-07-22 |
| WO2019093968A1 (en) | 2019-05-16 |
| SG11202004166TA (en) | 2020-06-29 |
| EP3681367A4 (en) | 2021-06-02 |
| US20230036248A1 (en) | 2023-02-02 |
| US20200315716A1 (en) | 2020-10-08 |
| JP2021502156A (ja) | 2021-01-28 |
| US11490973B2 (en) | 2022-11-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6569084B1 (en) | Endoscope holder and endoscope device | |
| US20200315720A1 (en) | Flexible robotic endoscopy system | |
| US8597280B2 (en) | Surgical instrument actuator | |
| US7828723B2 (en) | Power driven bending endoscope with detachable insertion portion | |
| JP6364013B2 (ja) | 医療器具のための自己対立駆動 | |
| JP2022105638A (ja) | 器具ベースの挿入アーキテクチャのためのシステム及び方法 | |
| US20180228557A1 (en) | Articulating robotic probes, systems and methods incorporating the same, and methods for performing surgical procedures | |
| EP1987789B1 (en) | Endoscope system and medical instrument | |
| CN108969103A (zh) | 具有手动释放杆的机器人外科工具 | |
| WO2016136301A1 (ja) | マニピュレータ及びマニピュレータシステム | |
| EP2324789A1 (en) | Medical system | |
| JP5331507B2 (ja) | 内視鏡 | |
| EP3119263A1 (en) | Master slave flexible robotic endoscopy system | |
| CN109496135B (zh) | 内窥镜检查系统部件 | |
| US20120053417A1 (en) | Endoscope and hardness adjuster | |
| US20230036248A1 (en) | Endoscopy system | |
| JP2009090087A (ja) | 内視鏡 | |
| JP3549435B2 (ja) | 内視鏡装置 | |
| CN115919475B (zh) | 一种分体式软式内镜手术机器人系统 | |
| WO2023026148A1 (en) | Surgical robotic system and surgical instrument thereof |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WD01 | Invention patent application deemed withdrawn after publication | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20200626 |