CN111033294A - 基于误差度量信息自适应地选择用于节点定位的距离估计的系统和方法 - Google Patents
基于误差度量信息自适应地选择用于节点定位的距离估计的系统和方法 Download PDFInfo
- Publication number
- CN111033294A CN111033294A CN201880055011.6A CN201880055011A CN111033294A CN 111033294 A CN111033294 A CN 111033294A CN 201880055011 A CN201880055011 A CN 201880055011A CN 111033294 A CN111033294 A CN 111033294A
- Authority
- CN
- China
- Prior art keywords
- wireless
- node
- nodes
- wireless sensor
- distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 98
- 238000012545 processing Methods 0.000 claims abstract description 120
- 230000006854 communication Effects 0.000 claims description 103
- 238000004891 communication Methods 0.000 claims description 103
- 238000005259 measurement Methods 0.000 claims description 53
- 230000015654 memory Effects 0.000 claims description 20
- 230000007175 bidirectional communication Effects 0.000 claims description 16
- 238000005457 optimization Methods 0.000 claims description 8
- 238000004422 calculation algorithm Methods 0.000 description 33
- 230000004044 response Effects 0.000 description 20
- 238000010586 diagram Methods 0.000 description 12
- 230000008569 process Effects 0.000 description 11
- 230000005540 biological transmission Effects 0.000 description 8
- 239000011159 matrix material Substances 0.000 description 6
- 230000008901 benefit Effects 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 238000005070 sampling Methods 0.000 description 5
- 230000001360 synchronised effect Effects 0.000 description 5
- 238000005406 washing Methods 0.000 description 5
- 238000012935 Averaging Methods 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 4
- 230000011664 signaling Effects 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 238000012544 monitoring process Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- WHXSMMKQMYFTQS-UHFFFAOYSA-N Lithium Chemical compound [Li] WHXSMMKQMYFTQS-UHFFFAOYSA-N 0.000 description 2
- 230000002411 adverse Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000010267 cellular communication Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000005286 illumination Methods 0.000 description 2
- 229910052744 lithium Inorganic materials 0.000 description 2
- 230000004807 localization Effects 0.000 description 2
- 230000000737 periodic effect Effects 0.000 description 2
- 230000010363 phase shift Effects 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 238000007476 Maximum Likelihood Methods 0.000 description 1
- HCHKCACWOHOZIP-UHFFFAOYSA-N Zinc Chemical compound [Zn] HCHKCACWOHOZIP-UHFFFAOYSA-N 0.000 description 1
- BPKGOZPBGXJDEP-UHFFFAOYSA-N [C].[Zn] Chemical compound [C].[Zn] BPKGOZPBGXJDEP-UHFFFAOYSA-N 0.000 description 1
- 239000002253 acid Substances 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 238000012804 iterative process Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 229910001386 lithium phosphate Inorganic materials 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 229910052987 metal hydride Inorganic materials 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- PXHVJJICTQNCMI-UHFFFAOYSA-N nickel Substances [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 1
- -1 nickel metal hydride Chemical class 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 239000004576 sand Substances 0.000 description 1
- BSWGGJHLVUUXTL-UHFFFAOYSA-N silver zinc Chemical compound [Zn].[Ag] BSWGGJHLVUUXTL-UHFFFAOYSA-N 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- TWQULNDIKKJZPH-UHFFFAOYSA-K trilithium;phosphate Chemical compound [Li+].[Li+].[Li+].[O-]P([O-])([O-])=O TWQULNDIKKJZPH-UHFFFAOYSA-K 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 229910052725 zinc Inorganic materials 0.000 description 1
- 239000011701 zinc Substances 0.000 description 1
Images


















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B17/00—Monitoring; Testing
- H04B17/30—Monitoring; Testing of propagation channels
- H04B17/309—Measuring or estimating channel quality parameters
- H04B17/318—Received signal strength
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
- H04W64/003—Locating users or terminals or network equipment for network management purposes, e.g. mobility management locating network equipment
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/74—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems
- G01S13/76—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems wherein pulse-type signals are transmitted
- G01S13/765—Systems using reradiation of radio waves, e.g. secondary radar systems; Analogous systems wherein pulse-type signals are transmitted with exchange of information between interrogator and responder
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/0244—Accuracy or reliability of position solution or of measurements contributing thereto
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0284—Relative positioning
- G01S5/0289—Relative positioning of multiple transceivers, e.g. in ad hoc networks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B17/00—Monitoring; Testing
- H04B17/20—Monitoring; Testing of receivers
- H04B17/27—Monitoring; Testing of receivers for locating or positioning the transmitter
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/14—Determining absolute distances from a plurality of spaced points of known location
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
- H04W64/006—Locating users or terminals or network equipment for network management purposes, e.g. mobility management with additional information processing, e.g. for direction or speed determination
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W92/00—Interfaces specially adapted for wireless communication networks
- H04W92/16—Interfaces between hierarchically similar devices
- H04W92/18—Interfaces between hierarchically similar devices between terminal devices
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Electromagnetism (AREA)
- Quality & Reliability (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Mobile Radio Communication Systems (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
本文公开了用于自适应地确定网络架构中的无线节点的位置的系统和方法。在一个示例中,一种系统包括无线网络架构中的具有已知位置的第一多个无线传感器节点和具有未知位置的第二多个无线传感器节点。第一多个无线节点中的无线传感器节点的一个或多个处理单元被配置成运行指令以确定第一多个无线传感器节点与第二多个无线传感器节点之间的用于定位的距离估计,确定针对每个距离估计的误差度量信息,以及基于误差度量信息自适应地选择用于定位的被确定距离估计。
Description
相关申请的交叉引用
本申请要求于2017年8月23日提交的申请号为15/684,891的美国申请的权益,其全部内容通过引用并入本文。
本申请涉及于2015年8月19日提交的申请号为14/830,668,题为“用于确定具有网状的特征的树状网络构架中无线传感器节点位置的系统和方法”的申请;以及于2016年6月3日提交的申请号为15/173,531,题为“存在多个通信路径的情况下用于精确射频定位的系统和方法”的申请,该两个申请均通过引用并入本文。
技术领域
本发明的实施例涉及基于误差度量信息自适应地选择用于节点定位的距离估计的系统和方法。
背景技术
在消费类电子产品和计算机工业中,无线传感器网络已经研究了很多年。在原始无线传感器网络中,一个或多个传感器与无线电一起实施以能够从布置在网络内的一个或多个传感器节点无线收集数据。每个传感器节点可以包括一个或多个传感器,并且将包括无线电和用于对传感器节点的操作供电的电源。室内无线网络中的节点的位置检测在许多应用中是有用并且重要的。
基于使用射频测量执行的三角测量的定位是一种用于确定三维空间中无线设备目标的位置的具有吸引力的方法。可以以多种方式执行基于RF的定位。必须确定多个目标对之间的距离,以能够基于各个对距离通过三角测量方法(例如,最小二乘法、全局搜索、梯度下降)计算三维空间中的相对位置。示例性实施方案包括集线器和多个传感器节点。注意的是,可以用节点来替换集线器,或者实际上,可以用一个或多个节点来替换集线器。通过RF通信使用射频技术估计所有各对之间的距离。一旦估计了距离,三角测量就可以用于确定每个目标在三维空间中的相对位置。如果在现实空间中已知至少两个目标的位置,则可以确定网络中每个目标的绝对位置。实际上,如果在网络内已知1个目标(例如,集线器)的位置以及到至少一个其它节点的角路径,则可以再次确定网络内每个目标的绝对位置。
因此,目标对之间的距离测量是RF的定位中的关键步骤。可以以多种方式执行距离估计。通信信号强度(RSSI)可以在对之间被测量,并且用于基于已知的信号衰减模型估计距离。可以测量目标之间发送的信号的飞行时间(TOF),并且可以基于已知的传播延迟模型估计距离。可以另外基于信号强度中角度变化的分辨率来估计到达角(AOA)。其中,RSSI通常由于衰减的变化而易于出错,因此,对于距离估计的吸引力不如TOF。
基于TOF的距离估计易受反射引起的误差影响,从而导致两个目标之间存在多个路径。在这种情况下,由于反射路径比直接路径长,因此估计路径可能被检测为长于实际路径。如果系统基于反射路径估计TOF,则在三角测量中会引入误差。
发明内容
对于本发明的一个实施例,本文公开用于确定网络架构中的无线传感器节点的位置的系统和方法。在一个示例中,一种用于在无线网络架构中的节点定位的系统包括:第一多个无线传感器节点,第一多个无线传感器节点的每个具有已知位置以及无线装置,具有一个或多个处理单元和用于在无线网络架构中发送和接收通信的RF电路。系统进一步包括第二多个无线传感器节点,第二多个无线传感器节点中的每个具有未知位置以及无线装置,具有用于在无线网络架构中传送和接收通信的RF电路。第一多个无线节点的无线传感器节点的一个或多个处理单元被配置成运行指令以确定第一多个无线传感器节点与第二多个无线传感器节点之间的用于定位的距离估计,确定针对每个距离估计的误差度量信息,以及基于误差度量信息自适应地选择用于定位的被确定距离估计。
在另一示例中,一种用于无线网络架构中的无线传感器节点定位的计算机实施方法包括确定具有已知位置的第一多个无线传感器节点和具有未知位置的第二多个无线传感器节点之间的距离估计。方法进一步包括确定针对每个距离估计的误差度量信息,基于误差度量信息自适应地选择距离估计,以及基于自适应地选择的距离估计确定第二多个无线传感器节点的位置信息。
从附图和下面详细描述中,本发明的实施例的其它特征和优点将变得显而易见。
附图说明
本发明的实施例通过示例的方式示出,并且不限于附图中的图,相同的附图标记在附图中表示相似的元件,并且在附图中:
图1示出根据一个实施例的无线节点的示例性系统。
图2示出根据一个实施例的具有多个用于通信的集线器的非对称树状和网状网络架构的系统。
图3示出根据一个实施例的飞行时间测量系统。
图4示出根据一个实施例的飞行时间测量系统的框图。
图5示出根据一个实施例的用于距离估计的完全同步系统。
图6示出根据一个实施例的记录RF信号的数据包是如何成为从装置510传送的时移形式信号。
图7A示出根据一个实施例的理想信道的相位响应。
图7B示出根据一个实施例的非理想信道的相位响应。
图8A至图8C示出根据一个实施例的通过基于误差度量信息自适应地选择节点的距离估计来确定节点的位置估计的定位方法。
图9A至图9C示出根据另一实施例的通过基于误差度量信息自适应地选择节点的距离估计来确定节点的位置估计的定位方法。
图10A示出根据一个实施例的被实施为电源插座的覆盖物1500的集线器的示例性实施例。
图10B示出根据一个实施例的被实施为电源插座的覆盖物的集线器框图的分解图的示例性实施例。
图11A示出根据一个实施例的被实施为在计算机系统、装置或通信集线器中布置的卡的集线器的示例性实施例。
图11B示出根据一个实施例的被实施为在计算机系统、装置或通信集线器中布置的卡的集线器964的框图的示例性实施例。
图11C示出根据一个实施例的在电器(例如,智能洗衣机、智能冰箱、智能恒温器、其它智能电器等)内实施的集线器的示例性实施例。
图11D示出根据一个实施例的在电器(例如,智能洗衣机、智能冰箱、智能恒温器、其它智能电器等)内实施的集线器1684的框图的分解图的示例性实施例。
图12示出根据一个实施例的传感器节点的框图。
图13示出根据一个实施例的具有集线器的系统或电器1800的框图。
具体实施方式
本文公开了在存在多个通信路径的情况下进行精确射频定位的系统和方法。在一个示例中,一种用于定位无线网络架构中的节点的系统包括:第一多个无线传感器节点,第一多个无线传感器节点中的每个具有已知位置以及无线装置,具有一个或多个处理单元和用于在无线网络架构中传送和接收通信的RF电路。系统进一步包括第二多个无线传感器节点,第二多个无线传感器节点中的每个具有未知位置以及无线装置,具有用于在无线网络架构中传送和接收通信的RF电路。第一多个无线节点中的无线传感器节点的一个或多个处理单元被配置成运行指令以确定第一多个无线传感器节点与第二多个无线传感器节点之间的用于定位的距离估计,确定每个距离估计的误差度量信息,以及基于误差度量信息自适应地选择用于定位的被确定距离估计。
在无线传感器网络中的各种应用中,可能需要确定网络内传感器节点的位置。例如,这种信息可以用于估计诸如安全摄像头、运动传感器、温度传感器和其它对于本领域技术人员显而易见的这种传感器的相对位置。然后,这种信息可以用于生成例如温度图、运动路径和多视点图像采集的增强信息。因此,期望定位系统和方法能够在无线网络特别是在室内环境中的准确地、低功率地和环境感知地定位节点。为此目的,也假设室内环境包括诸如在建筑物和其它建筑周围的区域的邻室内环境中可能存在类似的问题(例如,附近墙壁的存在等)。
描述一种用于室内环境的无线传感器网络,室内环境包括房屋、公寓、办公室和商业建筑物以及附近的外部位置,例如停车场、人行道和花园。无线传感器网络还可以用于具有电源的任何类型的建筑物、结构、围护结构、车辆、船等。传感器系统为传感器节点提供良好的电池寿命,同时保持长通信距离。
本发明的实施例提供了用于室内环境中定位检测的系统、设备和方法。于2015年8月19日提交的申请号14/830,668的、通过引用并入本文的美国专利申请公开了基于RF的定位技术。具体地,这些系统、设备和方法在无线传感器网络中实施定位,无线传感器网络主要使用树状网络结构与周期性网状结构特征通信,以在需要定位时用于路径长度估计。通过使用高频定位和低频通信,无线传感器网络提高了定位的准确度,同时提供了良好的室内通信质量。
树状无线传感器网络由于降低了与无线电信号接收功能相关联的功率要求而对于许多应用具有吸引力。于2015年1月29日提交的申请号为14/607,045的美国专利申请、于2015年1月29日提交的申请号为14/607,047的美国专利申请、于2015年1月29日提交的申请号为14/607,048的美国专利申请、以及于2015年1月29日提交的申请号为14/607,050的美国专利申请中描述了树状网络架构的示例,这些美国专利申请通过引用整体并入本文。
另一类经常使用的无线网络是网状网络。在该网络中,通信发生在一个或多个邻居之间,然后可以使用多跳架构沿着网络传递信息。因为信息在短距离上发送,所以这可以用于降低发送功率需求。另一方面,因为必须频繁地打开接收无线电以启用多跳通信方案,所以接收无线电功率需求可能增加。
基于使用无线网络中节点之间信号的飞行时间,通过利用信号传播速度相对恒定的事实,可以估计无线网络中的各个节点对之间的距离。本网络架构的实施例允许测量多对路径长度并且执行三角测量,然后估计三维空间中的各个节点的相对位置。
图1示出根据一个实施例的示例性无线节点系统。示例系统100包括无线节点110-116。节点与通信120-130(例如,节点标识信息、传感器数据、节点状态信息、同步信息、定位信息、用于无线传感器网络的其它信息、飞行时间(TOF)通信等)双向通信。基于使用飞行时间测量,可以估计各个节点对之间的路径长度(例如,距离估计)。例如,测量节点110和111之间各个飞行时间测量可以通过在已知时间从节点110向节点111发送信号来实现。节点111接收信号,记录接收通信120的信号的时间戳,然后可以例如将返回信号与发送返回信号的时间戳一起发送给A。节点110接收信号并记录接收的时间戳。基于这两个发送和接收时间戳,可以估计节点110和111之间的平均飞行时间。该过程可以在多个频率重复多次,以提高精度,并消除或减少由于在特定频率下不良信道质量引起的劣化。可以通过对各个节点对重复过程估计一组路径长度。例如,在图1中,路径长度是TOF150-160。然后,通过使用几何模型,可以基于类似三角测量的处理估计各个节点的相对位置。
在一个实施例中,用于确定节点位置估计的定位方法包括基于误差度量信息自适应地选择节点的距离估计。可以基于这些距离估计的误差度量排除超过误差阈值的一个或多个距离估计。
由于仅可以测量任意节点和集线器之间的路径长度,因此这种三角测量过程在树状网络中不可行。然后,这限制了树状网络的定位能力。为了在允许定位的同时保留树状网络的节能优势,在本发明的一个实施例中,用于通信的树状网络与用于定位的网状网络功能相组合。一旦利用网状网络功能完成定位,网络就切换回树状通信,并且仅周期性地测量节点和集线器之间的飞行时间。假设这些飞行时间保持相对恒定,则网络假设节点没有移动并且不浪费能量,从而试图重新运行网状定位。另一方面,当检测到树状网络中路径长度的变化时,网络切换到网状系统,并且重新三角测量以确定网络中每个节点的位置。
图2示出根据一个实施例的具有多个用于通信的集线器的非对称树状和网状网络架构的系统。系统700包括具有无线控制装置711的中央集线器710、具有无线控制装置721的集线器720、具有无线控制装置783的集线器782以及包括具有无线控制装置n的集线器n的附加集线器。未示出的附加集线器可以与中央集线器710、其它集线器通信,或者可以是附加中央集线器。每个集线器都与其它集线器和一个或多个传感器节点双向通信。集线器还被设计成与包括装置780的其装置(例如,客户端装置、移动装置、平板装置、计算装置、智能电器、智能TV等)双向通信。
传感器节点730、740、750、760、770、788、792、n和n+1(或终端节点)均分别包括无线装置731、741、751、761、771、789、793、758和753。如果传感器节点仅具有与高级集线器或节点的上游通信而不具有与其它集线器或节点的下游通信,则该传感器节点是终端节点。每个无线装置包括具有发送器和接收器(或收发器)的RF电路,以实现与集线器或其它传感器节点的双向通信。
在一个实施例中,中央集线器710与集线器720、782、集线器n、装置780以及节点760和770通信。这些通信包括无线非对称网络架构中的722、724、774、772、764、762、781、784、786、714和712通信。具有无线控制装置711的中央集线器被配置成向其它集线器发送通信,并且从其它集线器接收通信,以控制并监视无线非对称网络架构,包括分配节点组以及针对每组的保证时间信号。
集线器720与中央集线器710以及传感器节点730、740和750通信。与这些传感器节点的通信包括通信732、734、742、744、752和754。例如,从集线器720的角度来看,集线器接收通信732,并且通信734被发送到传感器节点。从传感器节点730的角度来看,通信732被发送到集线器720,并且集线器接收通信734。
在一个实施例中,中央集线器(或其它集线器)将节点760和770分配给组716,将节点730、740和750分配给组715,将节点788和792分配给组717,以及将节点n和n+1分配给组n。在另一示例中,组716和715被组合成单个组。
通过使用图1-图2中所示的架构,需要较长电池寿命的节点使消耗在通信上的能量最小,并且在树状层次中的较高层节点可以使用有效的能量源来实施,或者可以交替地使用提供更高容量的电池或提供更短电池寿命的电池。为了促进在电池供电的终端节点上实现更长电池寿命,可以在这些节点和它们的上层对等节点(以下称为最低层集线器)之间建立通信,使得在最低层集线器和终端节点之间发生最小的发送和接收流量。
在一个实施例中,节点将其大部分时间(例如,90%以上的时间、95%以上的时间、大约98%或99%以上的时间)花费在低能量的非通信状态中。当节点唤醒并进入通信状态时,节点可以操作将数据传输到最低层的集线器。数据可以包括节点标识信息、传感器数据、节点状态信息、同步信息、定位信息和用于无线传感器网络的其它此类信息。
为了基于RF确定两个目标之间的距离,执行测距测量(即,RF通信用于估计目标对之间的距离)。为了实现此目的,RF信号从一个装置被发送至另一个装置。图3示出根据一个实施例的飞行时间测量系统。如图3所示,发送装置310发送RF信号312,而接收装置320接收RF信号312。在此,示例性无线网络中,装置310可以是集线器或节点,并且装置320也可以是集线器或节点。
图4示出根据一个实施例的飞行时间测量系统的框图。接收装置(例如,装置320)从发送装置(例如,装置310)接收发送,并且处理RF信号412以使用低分辨率估计器440生成至少一个粗略估计442,并且使用高分辨率估计器450生成在两个装置之间控制传播延迟的至少一个精细估计452。然后,系统400利用组合器460合并粗略时间估计442和精细时间估计452以生成准确的飞行时间测量470。然后,如图4所示,该飞行时间测量470可以乘以光速以计算距离。
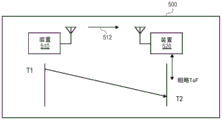
由于飞行时间测量本身对网络内操作的时序敏感,因此执行测量的装置的计时很重要。图5示出根据一个实施例的用于距离估计的完全同步系统。在完全同步系统500,即两个装置共享相同的时钟参考中,装置510首先在时间T1向装置520发送RF信号512(例如,具有数据包的RF信号)。数据包在时间T2到达装置520,并且触发装置520中的数据包检测算法以寄存时间T2。因为它是同步系统,所以飞行时间的粗略估计可以被计算为T2-T1。然而,这种测量的分辨率受采样时钟的时间分辨率的限制,采样时钟具有频率fs和时间分辨率Ts。图6中示出时间分辨率。此处,采样时钟表示系统的时间估计的最大精度,并且在示例性系统中,可以通过控制用于检测发送或接收的正时的电路的时钟频率来设置。例如,如果采样时钟是100MHz,则这种测量的分辨率将是10纳秒(ns),这对应于大约10英尺的准确度。
为了提高这种准确度,可以在装置520记录并分析RF信号512。图6示出根据一个实施例的记录RF信号的数据包是如何成为从装置510传送的时移形式信号。在采样时钟时间间隔(Ts),在T2处检测到RF信号512的数据包514。接收的数据包514的实际开始是早于T2的采样时钟周期的部分时段(例如,ΔT)。
可以用多种方法估计这部分时段(例如,ΔT)。例如,时域信号可以使用快速傅立叶变换(FFT)被转换成频域,然后除以原始信号的频谱获得信道的频率响应。基于基于正交频分复用(OFDM)的系统中,这种信息也可以从信道侦听信息(CSI)中获得。在理想的空中信道中,频域中的信道响应是
H(f)=Aej 2πfΔT
其中A是信道损耗,ΔT是信道延迟。图7A示出根据一个实施例的理想信道的相位响应。纵轴的相位202和横轴的频率204的曲线图示出理想信道210具有对应于2π*ΔT的斜率的直线。
将ΔT与T2-T1结合,可以建立准确的距离估计为:
距离=(T2–T1-斜率/(2π))X C
其中C是光速。
在非理想信道的情况下,存在来自环境的多次反射,并且整个信道响应可以被表示为
H(f)=∑Akej 2πfΔTk
其中Ak是每个路径的振幅,并且ΔTk是每个路径的延迟。因此,信道响应在相位上不同于直线。图7B示出根据一个实施例的非理想信道的相位响应。纵轴的相位252和横轴的频率254的曲线图示出非理想信道260。
可以使用诸如矩阵束、MUSIC等高级算法估计多个路径的最小延迟(ΔTk),并且可以根据提取的最小延迟计算距离。
距离=(T2–T1-S{H(f)})X C
其中S{H(f)}是从信道响应测量中提取的最小延迟结果,即它应当等于最小{ΔTk}。
通过将系统分为粗略估计和精细估计,可以同时实现高效率和高性能。粗略时间估计器可以覆盖长范围,但是降低了准确度。这种低准确度要求也使得估计器对干扰和多路径的敏感性降低,干扰和多路径是飞行时间测量的重要误差来源。可以用多种方法确定粗略时间估计。例如,可以从发送信号和接收信号指示时间的时间戳中提取粗略时间。可选地,可以使用中国剩余定理展开多个载波频率接收信号的相位测量,以估计粗略延迟。使用一特定非均匀载波频率组的非均匀离散傅立叶变换估计粗略延迟。
另一方面,高分辨率估计器仅需要覆盖相对较短的范围,因此减少了系统所需的计算资源。精细估计仅需要覆盖一个粗略采样周期的最大延迟。高级算法也可以应用于估计器以提高干扰和多径环境的性能。也可以使用多种方法导出精细估计。例如,可以从接收信号与理想形式信号的互相关性导出精细估计。它也可以使用接收信号从信道估计中导出。通过使用相位的斜率、逆FFT、矩阵束、MUSIC或其它方法,信道估计可以转换成精细延迟估计。
在线性代数中,矩阵束被定义为与复变量λ的矩阵值函数
L(λ)=∑λi Ai
在测距测量的背景下,信道响应具有类似的格式
H(f)=H(n*fsub)=∑Akej 2πfΔTk=∑Ak(ej 2πfsubΔTk)n=∑Ak(λ)n
其中频域测量是由相等间隔fsub(副载波频率)的频率下执行。
因此,矩阵束方法可以用来提取这种系统的极点(λ)。一旦从测量中提取了所有可能的极点(λk),就可以将每个时间延迟计算为
ΔTk=log(λk)/(j 2πfsub)
在另一实施例中,可以使用多信号分类(MUSIC)算法。MUSIC是基于谐波信号之和组成的信号建模
X(n)=∑Akej*wk*n
类似于矩阵束的情况,信道响应可以写为
H(f)=H(n*fsub)=∑Akej*2πf*ΔTk=∑Ak ej*2π*fsub*ΔTk*n
然后,算法基于测量结果X(n)提取Ak和wk,并且延迟元素可以计算为
ΔTk=wk/(2πfsub))
在估计总路径延迟之前,信道估计也可以与粗略延迟估计组合。可以将粗略延迟作为线性相移添加到信道估计。在同步情况下,它是:


在异步系统的情况下,计算的时钟相位偏移还被应用于线性相移与前向信道估计或反向信道估计的加法或减法。

或

或

然后,可以将矩阵束、MUSIC或其它方法应用于粗略信道估计和精细信道估计。这使全部估计路径是相对于0距离的真实距离。这有助于消除错误的短路径和选择视线路径。
如果节点具有同步时钟,则可以对多个数据包或多个无线传送(具有或不具有粗略延迟校正的)中的信道估计求平均。可以在使用矩阵束、MUSIC或用于路径估计的其它方法之前执行该平均。只要相对于信道的变化(信道相干时间)快速地测量多个信道估计,平均信道估计就可以提高信噪比(SNR)。较高的SNR提高了路径估计的准确度,并且将较弱的路径与噪声区分开。
在异步系统中,上述的相位偏移校正方法还实现对多个信道估计进行平均。当使用乘法方法时,可以对多个传送中的组合信道响应H(f)2或Htot(f)2求平均。当使用除法方法时,Htot(f)可以对多个传送求平均。
在本文所述的系统中,噪声、数值误差和其它此类限制可能估计错误延迟。当估计出较长的实际时间延迟,因为仅最短延迟用于与距离相关的延迟计算,所以时间延迟结果将不受影响。另一方面,当估计出较短的飞行时间延迟时,该飞行时间延迟可能被误认为实际飞行时间延迟。因此,消除错误的短路径提高时间延迟估计的准确性是很重要的。因此,在一个实施例中,实施了用于校正这种错误的系统。
在一个实施例中,系统识别节点之间距离估计的错误测量,并且不使用距离估计的错误测量的情况下,或者通过降低距离估计的错误测量的重要性计算或重新计算节点的位置。
在一个示例中,基于误差度量信息的误差度量大于误差阈值,可以从位置估计排除距离估计的至少一个错误测量。可以基于测量的距离估计(例如,飞行时间信息)与节点之间计算的距离估计之间的差值使用三角测量由位置以及位置估计来确定误差度量信息。
节点之间的距离估计的误差度量可以用加权因子进行加权,加权因子可以与距离测量的质量(例如,RSSI、从估计极点生成的信道响应与测量响应之间的拟合质量、估计视线信号的振幅等)相关。
在无线环境中,信号的振幅随着自由空间路径损耗所描述的距离的平方而减小。因此,期望由延迟估计算法估计的较短路径具有较高振幅。然后,使用这种预先消除错误的短路径估计。可以通过将估计距离的平方乘以估计振幅对接收信号的幅度进行归一化。如果这种归一化幅度低于某一阈值,则表明该路径的估计是由于噪声或算法限制,因此可以被排除。
实际上,实际信号强度还取决于包括墙壁、窗户、反射等的路径上发生的附加损耗。阈值可以根据由这些因素引起的预期损耗来设置,或者可以根据经验数据来设置。
一旦确立网络中各个对之间的距离,就可以将信息传递到网络的一个或多个成员,或者甚至传递到网络外部的系统,以便估计网络的各个成员的相对和/或绝对位置。这可以使用各种技术执行。例如,可以使用本领域技术人员公知的三角测量方法。诸如最小二乘法之类的误差最小化技术可以用于提高准确度并减小位置估计的误差。这种方法可以通过利用在各种成对的距离估计中产生的冗余信息减少与本文所述的实施例中的距离估计相关联的任何误差。可以基于确定的测距数据执行定位的其它方法包括多维标度测量、自主定位算法、地形算法、协作多边算法、分布式最大似然法、双曲线定位、移动地理分布式定位、弹性定位算法和其它无锚点定位算法和基于锚点的定位算法。
本文确定的定位信息可以用于促进或提高无线传感器网络的操作。于2015年8月19日提交的申请号为14/925,889的美国专利申请中公开了示例性无线传感器网络,该美国专利申请通过引用并入本文。定位可以用于建立网络内的逻辑和/或功能关系。在一个示例性实施例中,定位信息可用于限定传感器网络中的群集成员身份,该传感器网络与如图2所示的普通树状网络的群集实现节点到节点通信。在该实施例中,定位用于识别应当被分配到相同群集内的节点。这些节点可以在不通过集线器的情况下彼此直接通信。这种方法的优点在于,在三角测量计算中存在的距离估计的误差将不会导致网络的灾难性故障;相反,这些误差最多将导致群集的错误分配。重叠群集分配规则或松散群集分配规则的使用可进一步防止以不期望的方式影响网络性能。
在一个实施例中,定位算法包括基于锚节点的三角测量。在基于锚点的系统中,已知锚节点(例如,集线器、传感器、装置等)的位置。基于锚点的已知位置以及每个装置和每个锚点之间的测量距离(例如,距离估计)计算其它装置的未知位置。利用相同的进程逐个计算这些未知装置的位置。针对装置中的每个,关于锚节点i的距离测量是:

其中xi、yi和zi是第i个锚节点的坐标;di是未知装置和第i个锚节点之间的测量距离;x、y和z是作为估计目标的未知装置的坐标,并且ni是误差。通过针对估计设置不同的误差函数,可以使用线性最小二乘法计算未知装置(x,y,z)的位置。
如果距锚节点的至少一个距离测量具有一些误差,则针对具有未知位置的装置的计算的位置可能不准确。在该示例中,无线系统可以测量节点到节点距离的一部分,并且使用这些测量的距离提高了使用锚节点到节点测量而计算的位置。使用这种方法,也可以找到各个距离测量中误差的度量并将其制表。
可以排除具有大于误差阈值的误差度量的距离估计,以利用定位算法提高位置估计。
定位算法的初始位置估计也可以与形成无线网络体系架构的节点实际所处的环境的任何已知地图进行比较。如果地图指示任何处于不利条件的节点到节点或节点到锚点对,则这些对可以被排除或减少对定位算法的重视。不利条件可能包括墙壁、大的物体和干扰等。地图信息还可以用于识别不可能的位置,或者强制特定的节点拓扑(例如,节点可以仅位于墙壁上,节点可以仅位于远离墙壁等)。
在另一实施例中,对于无锚节点三角测量设置,不存在任何装置的已知位置。算法必须使用成对装置之间的距离测量以确定每个装置的相对位置。目标是找出全部装置的相对位置以使距离测量的总误差最小化。存在包括增量算法和并发算法的多种类型的算法。增量算法起始于一小组装置,并基于距离测量计算它们的位置。然后,小组装置用作其它装置的锚节点。它是一种简单的算法,但是具有缺点,即,即使利用高级算法更新早期节点的位置,早期计算的节点中的误差也可以容易地延续到后面节点。
因为并发算法同时估计所有位置以实现具有比增量算法更低误差的全局最优,所以并发算法解决了增量算法的问题。它通常使用迭代过程更新装置的位置,因此在使用更多计算能力和存储器的同时收敛将花费更长的时间。
图8A、图8B和图8C示出根据一个实施例的通过基于误差度量信息自适应地选择节点的距离估计确定节点的位置估计的定位方法。方法800的操作可以由无线装置、集线器(例如,装置)的无线控制装置或包括处理电路或处理逻辑的系统执行。处理逻辑可以包括硬件(电路、专用逻辑等)、软件(诸如在通用计算机系统或专用机器或装置上运行的软件)或两者的组合。在一个实施例中,锚节点、集线器、无线装置或远程装置或计算机执行方法800的操作。可以在与距离测量相关的相关数据所发送的远程计算机上执行与各种计算相关的算法。远程装置或计算机可以处于与具有多个无线节点的无线网络架构不同的位置。远程装置或计算机可以处于在无线网络架构内与在无线网络架构内传送和接收通信的某些节点不同的位置。
在操作801中,集线器初始化具有已知位置的第一多个无线节点(例如,锚节点)和具有未知位置的第二多个无线节点的无线网络架构,使得在一段时间(例如,预定时间段、足以定位的时间段等)内,一些节点可以被配置成网状网络架构。
在操作802中,具有射频(RF)电路和至少一个天线的第一多个无线节点(例如,锚节点等)中的无线节点将通信传送到无线网络架构(例如,无线非对称网络架构)中的第二多个无线节点(例如,无线传感器节点)中的无线节点,并且还从第二多个无线节点中的无线节点接收用于定位的通信,从而实现与无线网络架构中无线节点的RF电路的双向通信。在操作803中,锚节点、集线器、无线装置或远程装置或计算机确定第一多个无线节点中的无线节点(例如,第一锚节点)与第二多个传感器节点中至少一个无线节点(例如,第一无线节点、第二无线节点等)之间的距离估计。在一个示例中,操作803确定第一多个无线节点中的无线节点(例如,第一锚节点)与第二多个传感器节点之间的距离估计。
在操作804中,锚节点、集线器、无线装置或远程装置或计算机确定第一多个节点中的任何其它锚节点是否需要距离估计。如果否,则方法进行到操作805。如果是,则方法继续对第一多个无线传感器节点中的任何附加锚节点和第二多个无线节点中至少一个无线节点执行操作801-803。在一个示例中,操作803确定第二锚节点和第二多个传感器节点之间的距离估计。在另一示例中,操作803确定第三锚节点和第二多个传感器节点之间的距离估计。
具有已知位置的第一多个无线传感器节点和具有未知位置的第二多个无线传感器节点之间的距离估计可以包括多个路径。可以包括用于至少一个距离估计或用于全部距离估计的多个路径。在一个示例中,估计的最短路径距离(例如,视线距离、直线路径距离、直线距离)以及利用针对距离估计的测距算法计算的其它路径距离被包括在用于定位的定位算法中。计算每条路径的潜在位置。在距离估计达到锚节点(或所有锚节点)的某个阈值时,在操作805中,方法继续确定第二多个传感器节点中的第一传感器节点的位置估计。
在操作806中,无线节点(例如,锚节点、集线器、无线装置或者远程装置或计算机)的处理逻辑确定针对每个距离估计和针对包括在估计中的任意多个路径的误差度量信息。
在一个实施例中,误差度量信息包括基于针对具有已知位置的第一节点和具有未知位置的第二节点的距离估计与基于三角测量的第一和第二节点之间的计算距离之间的差值所确定的误差度量。
在操作807中,无线节点(锚节点、集线器、无线装置或已经提供了数据的远程装置或计算机)的处理逻辑将每个误差度量与误差阈值进行比较,并且排除具有超过误差阈值的误差度量的距离估计。在一个实施例中,误差阈值基于环境、距离测量、优化过程来预定义,或者在定位期间自适应地定义。在一个示例中,排除具有最大误差度量的距离估计。
在操作808中,无线节点、网络中的某个其它节点或远程计算机的处理逻辑基于误差度量信息自适应地选择用于定位(例如,第一传感器节点的定位)的距离估计子组。在一个示例中,处理逻辑基于小于或等于误差阈值的误差度量自适应地选择用于定位的距离估计子组。在该示例中,不选择大于误差阈值的距离估计和相关的误差度量用于确定定位。
在另一示例中,无线节点、网络中的其它节点或远程计算机的处理逻辑(基于例如RSSI、从估计极点生成的信道响应和测量响应之间的拟合质量、视线信号估计的振幅)自适应地将附加加权因子应用于误差度量,以降低具有较低距离测量质量的距离估计的重要性。
在操作810中,无线节点、网络中的其它节点或远程计算机的处理逻辑基于自适应地选择的距离估计第二次确定第二多个无线传感器节点中的第一无线节点的位置信息(例如,位置估计)。在一个示例中,无线节点的处理逻辑基于确定的距离估计子组确定用于定位的位置估计,其中至少一个距离估计和具有已知位置的相关无线传感器节点被排除用于确定位置估计。
在操作812中,无线节点、网络中的其它节点或远程计算机的处理逻辑确定是否需要计算任何附加传感器节点(例如,第二传感器节点、第三传感器)的位置信息。如果否,则方法进行到操作814。如果是,则方法返回到操作801,并且重复操作801-810(或操作801-810的子组),直到第二多个传感器节点中每个传感器节点的位置估计已经完成。
在一个示例中,无线节点、网络中的其它节点或远程计算机的处理逻辑在排除至少一个距离估计的情况下至少一次重复确定无线节点(例如,第二多个无线传感器节点)的位置信息。可选地,还排除至少一个具有已知位置的无线传感器节点。
在操作814中,无线节点、网络中的其它节点或远程计算机的处理逻辑提供用于对第二多个传感器节点的第一传感器节点进行测距的指令。在操作815中,无线节点、网络中的其它节点或远程计算机的处理逻辑提供用于对第二多个传感器节点的第二传感器节点进行测距的指令。在操作816中,第二多个传感器节点的第一和第二传感器节点发送和接收用于测距目的通信(例如,双向信令)。在操作817中,无线节点、网络中的其它节点或远程计算机的处理逻辑基于双向信令和位置信息确定第一传感器节点与第二传感器节点之间的距离估计。
在操作818中,无线节点、网络中的其它节点或远程计算机的处理逻辑确定任何附加传感器节点是否需要距离估计。如果是,则方法针对第二多个传感器节点中的附加传感器节点(例如,第三传感器节点、第四传感器节点)重复操作814-817。如果否,则方法进行到操作820。
在操作820中,假设在方法800中先前确定了其它节点位置,无线节点、网络中的其它节点或远程计算机的处理逻辑通过使用来自锚节点和其它节点的估计来确定针对第二多个传感器节点的第一传感器节点的位置估计。
在操作821中,无线节点、网络中的其它节点或远程计算机的处理逻辑确定针对传感器到传感器距离估计的误差度量信息。
在操作822中,无线节点(锚节点、集线器、无线装置或已经提供了数据的远程装置或计算机)的处理逻辑将每个误差度量与误差阈值进行比较,并且排除具有超过误差阈值的误差度量的距离估计。在一个实施例中,误差阈值基于环境、距离测量、优化过程被预定义,或者在定位期间自适应地定义。在一个示例中,排除具有最大误差度量的距离估计。
在操作823中,无线节点、网络中的某个其它节点或远程计算机的处理逻辑基于误差度量信息自适应地选择用于定位(例如,第一传感器节点的定位)的距离估计子组。在一个示例中,处理逻辑基于小于或等于误差阈值的误差度量自适应地选择用于定位的距离估计子组。在一个示例中,不选择大于误差阈值的距离估计和相关的误差度量用于确定定位。
在另一示例中,无线节点、网络中的其它节点或远程计算机的处理逻辑自适应地将附加加权因子应用于误差度量,以(基于例如RSSI、从估计极点生成的信道响应和测量响应之间的拟合质量、视线信号估计的振幅)淡化具有较低距离测量质量的距离估计。
在操作824中,无线节点、网络中的其它节点或远程计算机的处理逻辑基于自适应地选择的距离估计第二次确定第二多个无线传感器节点的第一无线节点的位置信息(例如,位置估计)。在一个示例中,无线节点的处理逻辑基于被确定距离估计子组确定用于定位的位置估计,其中至少一个距离估计和具有已知位置的相关无线传感器节点被排除用于确定位置估计。
在操作825,无线节点、网络中的其它节点或远程计算机的处理逻辑确定是否需要计算任何附加传感器节点(例如,第二传感器节点、第三传感器)的位置信息。如果是,则方法返回到操作814,并且重复操作814和后续操作,直到第二多个传感器节点中每个传感器节点的位置估计完成。
如果否,则方法进行到操作826以确定第二多个传感器节点的传感器节点(例如,第一传感器节点)的位置信息是否可接受。如果可接受,则该方法完成。如果不可接受,则方法返回到操作814,并重复操作814和后续操作,直到在操作826中获得针对传感器节点的可接受位置信息。也可以验证其它传感器节点的位置信息可接受。
在操作828中,一旦完成定位,无线节点、网络中的其它节点或远程计算机的处理逻辑将无线网络配置成树型或树状网络架构(或不具有网状特征的树状结构)中。
图9A、图9B和图9C示出根据另一实施例的通过基于误差度量信息自适应地选择节点的距离估计确定节点的位置估计的定位方法。方法900的操作可以由无线装置、集线器(例如,装置)的无线控制装置或包括处理电路或处理逻辑的系统执行。也可以运行方法使用网络中的远程计算机或装置或某些其它节点。
在一个实施例中,锚节点、集线器、无线装置或远程装置或计算机执行方法900的操作。可以在与距离测量相关的相关数据所发送的远程计算机上执行与各种计算相关的算法。远程装置或计算机可以处于与具有多个无线节点的无线网络架构不同的位置。远程装置或计算机可以处于在无线网络架构内与在无线网络架构内传送和接收通信的某些节点不同的位置。
处理逻辑可以包括硬件(电路、专用逻辑等)、软件(诸如在通用计算机系统或专用机器或装置上运行的软件)或两者的组合。在一个实施例中,锚节点、集线器或无线装置执行方法900地操作。
在操作901中,集线器初始化具有已知位置的第一多个无线节点(例如,锚节点)和具有未知位置的第二多个无线节点的无线网络架构,使得在一段时间(例如,预定的时间段、足以定位的时间段等)内,一些节点可以被配置成网状网络架构。
在操作902中,具有射频(RF)电路和至少一个天线的第一多个无线节点(例如,无线传感器节点、锚节点、集线器等)的无线锚节点将通信传送到无线网络架构(例如,无线非对称网络架构)中的第二多个无线节点(例如,无线传感器节点)中的无线节点,并且还从第二多个无线节点中的无线节点接收用于定位的通信,从而实现与无线网络架构中无线节点的RF电路的双向通信。在操作903中,锚节点、集线器、无线装置或远程装置或计算机确定第一多个无线节点中的无线节点(例如,第一锚节点)与第二多个传感器节点中至少一个无线节点(例如,第一无线节点、第二无线节点等)之间的距离估计。在一个示例中,操作903确定第一多个无线节点中的无线节点(例如,第一锚节点)与第二多个传感器节点之间的距离估计。
在操作904中,锚节点、集线器、无线装置或远程装置或计算机确定第一多个节点中的任何其它锚节点是否需要距离估计。如果否,则方法进行到操作905。如果是,则方法继续对第一多个无线传感器节点中的任何附加锚节点和第二多个无线节点中至少一个无线节点执行操作901-903。在一个示例中,操作903确定第二锚节点和第二多个传感器节点之间的距离估计。在另一示例中,操作903确定第三锚节点和第二多个传感器节点之间的距离估计。
具有已知位置的第一多个无线传感器节点和具有未知位置的第二多个无线传感器节点之间的距离估计可以包括多个路径。可以包括用于至少一个距离估计或用于全部距离估计的多个路径。在一个示例中,估计的最短路径距离(例如,视线距离、直线路径距离、直线距离)以及利用针对距离估计的测距算法计算的其它路径距离被包括在用于定位的定位算法中。计算每条路径的潜在位置。在距离估计达到锚节点(或所有锚节点)的某个阈值时,在操作905中,方法继续确定第二多个传感器节点中的第一传感器节点的位置估计。
在操作906中,无线锚节点的处理逻辑确定针对每个距离估计和针对包括在估计中的任意多个路径的误差度量信息。
在一个实施例中,误差度量信息包括基于针对具有已知位置的第一节点和具有未知位置的第二节点的距离估计与基于三角测量的第一和第二节点之间的计算距离之间的差值所确定的误差度量。
在另一实施例中,基于位置信息的位置估计和无线网络架构环境的先前信息确定误差度量,使得任何不利的距离估计被排除或者利用更高的误差度量来调整不利的距离估计的相关误差度量。
在另一实施例中,基于包括通信信号强度(RSSI)的信号或测距测量信号的接收质量确定误差度量。
在操作908中,无线锚节点的处理逻辑将每个误差度量与误差阈值进行比较,并且排除具有超过误差阈值的误差度量的距离估计。在一个实施例中,误差阈值基于环境、距离测量、优化过程来预定义,或者在定位期间自适应地定义。在一个示例中,排除具有最大误差度量的距离估计。
在操作909中,无线锚节点的处理逻辑基于误差度量信息自适应地选择用于定位(例如,第一传感器节点的定位)的距离估计子组,或者将加权因子应用于距离估计。在一个示例中,处理逻辑基于小于或等于误差阈值的误差度量自适应地选择用于定位的距离估计子组。在该示例中,不选择大于误差阈值的距离估计和相关误差度量用于确定定位。
在另一示例中,无线节点的处理逻辑基于误差度量自适应地将加权因子应用于定位的确定距离估计,以降低具有超过误差阈值的误差度量的距离估计的重要性。
在操作910中,无线锚节点的处理逻辑基于自适应选择的距离估计第二次确定针对(例如,第二多个无线传感器节点的)第一无线节点的位置信息(例如,位置估计)。在一个示例中,无线节点的处理逻辑基于被确定距离估计子组确定用于定位的位置估计,其中至少一个距离估计和具有已知位置的相关的无线传感器节点被排除用于确定位置估计。
在操作912中,无线锚节点的处理逻辑确定是否需要计算任何附加传感器节点(例如,第二传感器节点、第三传感器)的位置信息。如果否,则方法进行到操作914。如果是,则方法返回到操作901,并且重复操作901-910(或操作901-910子组),直到第二多个传感器节点中每个传感器节点的位置估计已经完成。
在另一示例中,无线锚节点的处理逻辑基于将加权因子应用于用于定位的确定的距离估计来估计用于定位的位置估计,以淡化具有超过误差阈值的误差量度的距离估计。
在一个示例中,无线锚节点的处理逻辑在排除至少一个距离估计的情况下至少一次重复确定针对无线节点(例如,第二多个无线传感器节点)的位置信息。可选地,还排除至少一个具有已知位置的无线传感器节点。具有最低误差度量(例如,低于误差阈值的误差度量、显著低于误差阈值的误差度量)的距离估计可以用于确定无线节点的位置信息。可选地,至少一个距离估计和具有已知位置的相关无线传感器节点由于误差度量信息被分配改进的影响。
在一个示例中,无线节点的处理逻辑基于初始节点位置估计、距离估计和相关的误差度量以及第一多个无线传感器节点的位置,重复地确定针对至少一个无线传感器节点的定位。
在操作914中,无线节点、网络中的其它节点或远程计算机的处理逻辑提供用于对第二多个传感器节点的第一传感器节点进行测距的指令。在操作915中,无线节点、网络中的其它节点或远程计算机的处理逻辑提供用于对第二多个传感器节点的第二传感器节点进行测距的指令。在操作916中,第二多个传感器节点的第一和第二传感器节点发送和接收用于测距目的通信(例如,双向信令)。在操作917中,无线节点、网络中的其它节点或远程计算机的处理逻辑基于双向信令和位置信息确定第一传感器节点与第二传感器节点之间的距离估计。
在操作918中,无线节点、网络中的其它节点或远程计算机的处理逻辑针对第二多个传感器节点中的附加传感器节点的(例如,第三传感器节点、第四传感器节点)重复操作914-917。
在操作920中,假设在方法900中先前确定了其它节点位置,无线节点、网络中的其它节点或远程计算机的处理逻辑通过使用来自锚节点和其它节点的位置的估计来确定针对第二多个传感器节点的第一传感器节点的位置估计。
在操作921中,无线节点、网络中的其它节点或远程计算机的处理逻辑确定针对传感器到传感器距离估计的误差度量信息。
在操作922中,无线节点(锚节点、集线器、无线装置或已经提供了数据的远程装置或计算机)的处理逻辑将每个误差度量与误差阈值进行比较,并且排除具有超过误差阈值的误差度量的距离估计。在一个实施例中,误差阈值基于环境、距离测量、优化过程被预定义,或者在定位期间自适应地定义。在一个示例中,排除具有最大误差度量的距离估计。
在操作923中,无线节点、网络中的某个其它节点或远程计算机的处理逻辑基于误差度量信息自适应地选择用于定位(例如,第一传感器节点的定位)的距离估计子组。在一个示例中,处理逻辑基于小于或等于误差阈值的误差度量自适应地选择用于定位的距离估计子组。在一个示例中,不选择大于误差阈值的距离估计和相关误差度量用于确定定位。
在另一示例中,无线节点、网络中的其它节点或远程计算机的处理逻辑自适应地将附加加权因子应用于误差度量,以(基于例如RSSI、从估计极点生成的信道响应和测量响应之间的拟合质量、视线信号估计的振幅)淡化具有较低的距离测量质量的距离估计。
在操作924中,无线节点、网络中的其它节点或远程计算机的处理逻辑基于自适应地选择的距离估计第二次确定第二多个无线传感器节点中的第一无线节点的位置信息(例如,位置估计)。在一个示例中,无线节点的处理逻辑基于被确定距离估计子组确定用于定位的位置估计,其中至少一个距离估计和具有已知位置的相关无线传感器节点被排除用于确定位置估计。
在操作925中,无线节点、网络中的其它节点或远程计算机的处理逻辑确定是否需要计算任何附加传感器节点(例如,第二传感器节点、第三传感器)的位置信息。如果是,则方法返回到操作914,并且重复操作914和后续操作,直到第二多个传感器节点中每个传感器节点的位置估计完成。
如果否,则方法进行到操作926以确定第二多个传感器节点中第一传感器节点的位置信息是否可接受。如果可接受,则该方法完成。如果不可接受,则方法返回到操作914,并重复操作914和后续操作,直到在操作926中获得针对第一传感器节点的可接受位置信息。也可以验证其它传感器节点的位置信息是可接受的。
在操作928中,一旦完成定位,无线节点的处理逻辑将无线网络配置成树型或树状网络架构(或不具有网状特征的树状结构)中。
本文所讨论的集线器和节点之间的通信可以通过使用包括但不限于下列的各种方法实施:使用射频的直接无线通信、通过将信号调制到房屋、公寓、商业建筑物等室内的电线上实现的电力线通信、使用诸如802.11a、802.11b、802.11n、802.11ac标准的WiFi通信协议的WiFi通信和对本领域普通技术人员显而易见的其它此类WiFi通信协议的WiFi通信、诸如GPRS、EDGE、3G、HSPDA、LTE的蜂窝通信和对本领域普通技术人员显而易见的其它蜂窝通信协议、蓝牙通信、使用诸如Zigbee众所周知的无线传感器网络协议的通信和对本领域普通技术人员显而易见的其它有线或无线通信方案。
终端节点和集线器之间的射频通信可以以包括窄带、信道重叠、信道步进、多通道宽带和超宽带通信的各种方式实施。
根据本发明的实施例,可以以多种方式物理地实施集线器。图10A示出根据一个实施例的实施为电源插座的覆盖物1500的集线器的示例性实施例。覆盖物1500(例如,面板)包括集线器1510和将集线器联接到电源插座1502的连接1512(例如,通信链路、信号线、电连接等)。可选地(或另外地),集线器联接到电源插座1504。出于安全和美观的目的,覆盖物1500覆盖或封闭电源插座1502和1504。
图10B示出根据一个实施例的实施为电源插座的覆盖物的集线器1520的框图的分解图的示例性实施例。集线器1520包括将周期性地转换方向的交流电(AC)转换为仅在一个方向上流动的直流电(DC)的电源整流器1530。电源整流器1530经由连接1512(例如,通信链路、信号线、电连接等)从插座1502接收AC,并且将AC转换成DC,以经由连接1532(例如,通信链路、信号线、电连接等)向控制器电路1540供应电力,并且经由连接1534(例如,通信链路、信号线、电连接等)向RF电路1550供应电力。控制器电路1540包括存储器1542或联接到存储指令的存储器,指令由控制器电路1540的处理逻辑1544(例如,一个或多个处理单元)执行以控制集线器的操作,以形成、监视和执行用于本文所讨论的无线非对称网络定位。RF电路1550可以包括收发器或单独的发送器1554和接收器1556功能,用于经由天线1552与无线传感器节点发送和接收的双向通信。RF电路1550经由连接1534(例如,通信链路、信号线、电连接等)与控制器电路1540双向通信。集线器1520可以是无线控制装置1520,或者控制器电路1540、RF电路1550和天线1552的组合可以形成如本文所讨论的无线控制装置。
图11A示出根据一个实施例的实施为在计算机系统、设备或通信集线器中布置的卡的集线器的示例性实施例。卡1662可以如箭头1663所示被插入在系统1660(例如,计算机系统、电器或通信集线器)中。
图11B示出根据一个实施例的实施为在计算机系统、设备或通信集线器中布置的卡的集线器1664的框图的示例性实施例。集线器1664包括经由连接1674(例如,通信链路、信号线、电连接等)向控制器电路1668提供电源(例如,DC电源),并且经由连接1676(例如,通信链路、信号线、电连接等)向RF电路1670提供电力的电源1666。
控制器电路1668包括存储器1661或联接到存储指令的存储器,指令由控制器电路1668的处理逻辑1663(例如,一个或多个处理单元)执行以控制集线器的操作,从而形成、监视和执行用于本文所讨论的无线非对称网络定位。RF电路1670可以包括收发器或单独的发送器1675和接收器1677功能,用于通过天线1678与无线传感器节点发送和接收的双向通信。RF电路1670经由连接1672(例如,通信链路、信号线、电连接等)与控制器电路1668进行双向通信。集线器1664可以是无线控制装置1664,或者控制器电路1668、RF电路1670和天线1678的组合可以形成如本文所讨论的无线控制装置。
图11C示出根据一个实施例的在电器(例如,智能洗衣机、智能冰箱、智能恒温器、其它智能电器等)内实施的集线器的示例性实施例。电器1680(例如,智能洗衣机)包括集线器1682。
图11D示出根据一个实施例的在电器(例如,智能洗衣机、智能冰箱、智能恒温器、其它智能电器等)内实施的集线器1684框图的分解图的示例性实施例。集线器包括经由连接1696(例如,通信链路、信号线、电连接等)向控制器电路1690提供电源(例如,DC电源)并且经由连接1698(例如,通信链路、信号线、电连接等)向RF电路1692提供电力的电源1686。控制器电路1690包括存储器1691或联接到存储指令的存储器,指令由控制器电路1690的处理逻辑1688(例如,一个或多个处理单元)执行以控制集线器的操作,从而形成、监视和执行用于本文所讨论的无线非对称网络定位。RF电路1692可以包括收发器或单独的发送器1694和接收器1695功能,用于经由天线1699与无线传感器节点发送和接收的双向通信。RF电路1692通过连接1689(例如,通信链路、信号线、电连接等)与控制器电路1690进行双向通信。集线器1684可以是无线控制装置1684,或者控制器电路1690、RF电路1692和天线1699的组合可以形成如本文所讨论的无线控制装置。
在一个实施例中,一种用于提供无线非对称网络架构的装置(例如,集线器)包括用于存储指令的存储器、集线器的处理逻辑(例如,一个或多个处理单元、处理逻辑1544、处理逻辑1663、处理逻辑1688、处理逻辑1763、处理逻辑1888)以运行指令来建立和控制无线非对称网络架构中的通信,以及包括在无线非对称网络架构中发送和接收通信的多个天线(例如,天线1552、天线1678、天线1699、天线1311、1312和1313等)的射频(RF)电路(例如,RF电路1550、RF电路1670、RF电路1692、RF电路1890)。RF电路和多个天线,用于向多个传感器节点(例如,节点1、节点2)发送通信,每个传感器节点具有无线装置,无线装置具有发送器和接收器(或具有收发功能的发送器和接收器),以实现与无线非对称网络架构中的RF电路装置的双向通信。
在一个示例中,第一无线节点包括无线装置,该无线装置具有一个或多个处理单元和用于在无线网络架构中发送和接收包括具有第一数据包的第一RF信号的通信的RF电路。第二无线节点包括无线装置,该无线装置具有发送器和接收器以实现与无线网络架构中的第一无线节点的双向通信,第一无线节点包括具有第二数据包的第二RF信号。第一无线节点的一个或多个处理单元被配置成执行指令,以确定具有已知位置的第一多个无线传感器节点与具有未知位置的第二多个无线传感器节点之间的距离估计,确定每个距离估计的误差度量信息,基于误差度量信息自适应地选择距离估计,并且基于自适应地选择距离估计确定第二多个无线传感器节点的位置信息。
在一个示例中,装置由主电源供电,并且多个传感器节点均由电池电源供电以形成无线网络架构。
各种电池可以用于包括基于锂的化学物质,例如锂离子、锂聚合物、磷酸锂,以及对于本领域普通技术人员来说是显而易见的其它化学物质的无线传感器节点中。可以使用的其它化学物质包括镍金属氢化物、标准碱性电池化学物质、银锌和锌空气电池化学物质、标准碳锌电池化学物质、铅酸电池化学物质或对本领域普通技术人员显而易见的任何其它化学物质。
本发明还涉及用于执行在此描述操作的设备。该设备可以被专门构造用于所需目的,或者可以包括由存储在计算机中的计算机程序选择性地激活或重新配置的通用计算机。这种计算机程序可以存储在计算机可读存储介质,例如但不限于任何类型的磁盘,包括软盘、光盘、CD-ROM和磁光盘、只读存储器(ROM)、随机存取存储器(RAM)、EPROM、EEPROM、磁卡或光卡、或者适合于存储电子指令的任何类型的介质中。
本文提出的算法和显示与任何特定计算机或其它装置没有内在关联。各种通用系统可以与根据本文所教导的程序一起使用,或者可以证明构造更专用的装置执行所需的方法操作是方便的。
图12示出根据一个实施例的传感器节点的框图。传感器节点1700包括电源1710(例如,能量源、电池源、主电池、可充电电池等),经由连接1774(例如,通信链路、信号线、电连接等)向控制器电路1720提供电源(例如,DC电源),经由连接1776(例如,通信链路、信号线、电连接等)向RF电路1770提供电源,并且经由连接1746(例如,通信链路、信号线、电连接等)向感测电路1740提供电力。控制器电路1720包括存储器1761或联接到存储指令的存储器,指令由控制器电路1720的处理逻辑1763(例如,一个或多个处理单元)执行以控制传感器节点的操作从而用于形成和监测如本文所讨论的无线非对称网络。RF电路1770(例如,通信电路)可以包括收发器或单独的发送器1775和接收器1777功能,用于通过天线1778与集线器和可选的无线传感器节点发送和接收的双向通信。RF电路1770经由连接1772(例如,电连接)与控制器电路1720双向通信。感应电路1740包括各种类型的感应电路和传感器,包括图像传感器和电路1742、水分传感器和电路1743、温度传感器和电路、湿度传感器和电路、空气质量传感器和电路、光传感器和电路、运动传感器和电路1744、音频传感器和电路1745、磁性传感器和电路1746以及传感器和电路n等。
本文公开的无线定位技术可以与其它感测信息组合以提高整个网络的定位准确度。例如,在一个或多个节点包括相机的无线传感器中,所采集的图像可与图像处理和机器学习技术一起使用,以确定正被监视的传感器节点是否正在查看相同的场景并因此可能在相同的房间中。通过使用周期性照明和光电探测器可以实现类似的优势。通过频闪照明并使用光电检测器检测,可以检测到光路的存在,这可能表示在频闪灯与检测器之间不存在不透明墙壁。在其它实施例中,磁传感器可以集成到传感器节点中,并用罗盘检测被监视的传感器节点的方向。然后,这些信息可以与定位信息一起使用以确定传感器是否处于墙壁、地板、天花板或其它位置上。
在一个示例中,每个传感器节点可以包括图像传感器,并且房屋的每个围墙包括一个或多个传感器节点。集线器分析包括图像数据和可选的定向数据以及定位信息的传感器数据,以确定每个传感器节点的绝对位置。然后,集线器可以为用户建立建筑物每个房间的三维图像。可以生成具有墙壁、窗户、门等位置的平面图。图像传感器可以采集表示反射变化的图像,反射变化可以指示房屋的完整问题(例如,水、屋顶渗漏等)。
图13示出根据一个实施例的具有集线器的系统1800的框图。系统1800包括无线非对称网络架构的集线器1882或中央集线器,或者与其集成。系统1800(例如,计算装置、智能TV、智能电器、通信系统等)可以与任何类型的无线装置(例如,蜂窝电话、无线电话、平板电脑、计算装置、智能TV、智能电器等)通信用于发送和接收无线通信。系统1800包括处理系统1810,其包括控制器1820和处理单元1814。处理系统1810经由一个或多个双向通信链路或信号线1898、1818、1815、1816、1817、1813、1819、1811分别与集线器1882、输入/输出(I/O)单元1830、射频(RF)电路1870、音频电路1860、用于采集一个或多个图像或视频的光学装置1880、用于确定系统1800的运动数据(例如,在三维中)的可选运动单元1844(例如,加速度计、陀螺仪等)、电力管理系统1840和机器可访问非暂时性介质1850通信。
集线器1882包括电源1891,经由连接1885(例如,通信链路、信号线、电连接等)向控制器电路1884提供电力(例如,DC电源),并且经由连接1887(例如,通信链路、信号线、电连接等)向RF电路1890提供电力。控制器电路1884包括存储器1886或联接到存储指令的存储器,指令由控制器电路1884的处理逻辑1888(例如,一个或多个处理单元)执行以控制集线器的操作从而用于形成和监测如本文所讨论的无线非对称网络。RF电路1890可以包括收发器或单独的发送器(TX)1892和接收器(RX)1894功能,用于经由天线1896与无线传感器节点发送和接收双向通信。RF电路1890经由连接1889(例如,通信链路、信号线、电连接等)与控制器电路1884双向通信。集线器1882可以是无线控制装置1884,或者控制器电路1884、RF电路1890和天线1896的组合可以形成如本文所讨论的无线控制装置。
系统的RF电路1870和天线1871或者集线器1882的RF电路1890和天线1896通过无线链路或网络向本文所讨论的集线器或传感器节点的一个或多个其它无线装置发送信息和接收信息。音频电路1860被联接到音频扬声器1862和麦克风1064,并且包括用于处理语音信号的已知电路。一个或多个处理单元1814经由控制器1820与一个或多个机器可访问的非暂时性介质1850(例如,计算机可读介质)通信。介质1850可以是能够存储供一个或多个处理单元1814使用的代码和/或数据的任何装置或介质(例如,存储装置、存储介质)。介质1850可以包括存储器分层结构,该存储器分层结构包括但不限于高速缓存、主存储器和辅助存储器。
介质1850或存储器1886存储实施本文所述任何一个或多个方法或功能的一组或多组指令(或软件)。软件可以包括操作系统1852、用于建立、监视和控制无线非对称网络架构的网络服务软件1856、通信模块1854、以及应用1858(例如,房屋或建筑物安全应用、房屋或建筑物完整性应用、开发者应用等)。在装置1800执行期间,软件还可以完全或部分驻留在介质1850、存储器1886、处理逻辑1888内或处理单元1814内。图11中示出的组件可以在包括一个或多个信号处理和/或专用集成电路的硬件、软件、固件或其任何组合中实施。
通信模块1854能够与其它装置通信。I/O单元1830与不同类型的输入/输出(I/O)装置1834(例如,显示器、液晶显示器(LCD)、等离子显示器、阴极射线管(CRT)、触摸显示设备、或用于接收用户输入和显示输出的触摸屏、可选的字母数字输入装置)通信。
可将以下示例中的任意一个组合成一个实施例,或者这些实例可以是单独的实施例。在一个示例中,一种用于定位无线网络架构中的节点的系统包括:每个具有已知位置和无线位置的第一多个无线传感器节点,无线装置具有一个或多个处理单元和用于在无线网络架构中发送和接收通信的RF电路。系统还包括每个具有未知位置和无线装置的第二多个无线传感器节点,无线装置具有用于在无线网络架构中发送和接收通信的RF电路。第一多个无线节点的无线传感器节点的一个或多个处理单元被配置成运行指令以确定第一多个无线传感器节点与第二多个无线传感器节点之间的用于定位的距离估计,确定针对每个距离估计的误差度量信息,以及基于误差度量信息自适应地选择用于定位的被确定距离估计。
在另一示例中,误差度量信息包括与具有已知位置的无线传感器节点和具有未知位置的无线传感器节点之间的每个距离估计相关的误差度量。
在另一示例中,第一多个无线节点的无线传感器节点的一个或多个处理单元被配置为运行指令以将每个误差度量与误差阈值进行比较,并且基于小于或等于误差阈值的误差度量自适应地选择用于定位的被确定距离估计子组。
在另一示例中,第一多个无线节点的无线传感器节点的一个或多个处理单元被配置为运行指令以基于被确定距离估计子组确定用于定位的位置估计,其中至少一个距离估计和具有已知位置的相关无线传感器节点被排除用于确定位置估计。
在另一示例中,误差阈值是基于环境、距离测量、优化过程被预定义的,或者在定位期间自适应地定义的。在另一示例中,第一多个无线节点的无线传感器节点的一个或多个处理单元被配置为运行指令以将每个误差度量与误差阈值进行比较,或者自适应地将加权因子应用于度量以淡化具有低距离测量质量的距离估计。
在另一示例中,第一多个无线节点的无线传感器节点的一个或多个处理单元被配置为运行指令,以通过使用以下至少两种重复地确定针对至少一个无线传感器节点的修正位置:第一多个节点的已知位置、来自第一和第二多个传感器节点之间定位的先前距离估计和相关误差度量、第二多个节点的节点之间的重复距离估计、来自第一和第二多个传感器节点之间的定位或来自较早的修正位置的第二多个节点的估计位置,以及在每个修正定位阶段中自适应地选择用于定位的被确定距离估计。
在另一示例中,第一多个无线节点的无线传感器节点的一个或多个处理单元被配置为运行指令,以基于第一距离估计子组和相关误差度量或者基于第二距离估计子组和相关误差度量重复地确定至少一个无线传感器节点的定位。
在一个示例中,一种用于定位无线网络架构中的无线传感器节点的计算机实施方法包括:确定具有已知位置的第一多个无线传感器节点中的每一个与具有未知位置的第二多个无线传感器节点中的每一个之间的距离估计;确定针对每个距离估计的误差度量信息;基于误差度量信息自适应地选择距离估计;以及基于自适应地选择的距离估计确定针对第二多个无线传感器节点的位置信息。
在另一示例中,误差度量信息包括,与具有已知位置的无线传感器节点和具有未知位置的无线传感器节点之间的每个距离估计相关的误差度量。
在另一示例中,计算机实施方法进一步包括将每个误差度量与误差阈值进行比较,并且基于小于或等于误差阈值的误差度量自适应地选择用于定位的被确定距离估计子组。
在另一示例中,计算机实施方法进一步包括基于被确定距离估计子组确定用于定位的位置估计,其中至少一个距离估计和具有已知位置的相关无线传感器节点被排除用于确定位置估计。
在另一示例中,误差阈值是基于环境、距离测量、优化过程被预定义的,或者是在定位期间自适应地定义的。
在另一示例中,计算机实施方法进一步包括利用被排除的至少一个距离估计和具有已知位置的相关无线传感器节点,或者利用具有修改作用的至少一个距离估计和具有已知位置的相关无线传感器节点,至少一次重复地确定针对第二多个无线传感器节点的位置信息。
在另一示例中,误差度量包括基于具有已知位置的第一节点和具有未知位置的第二节点的距离估计与基于三角测量计算的第一和第二节点之间的距离之间的差值确定的误差度量。
在另一示例中,基于位置信息的位置估计和无线网络架构环境的先前信息来确定误差度量,使得任何不利的距离估计被排除或者利用更高的误差度量来调整不利的距离估计的相关误差度量。
在一个示例中,一种设备包括用于存储指令的存储器、一个或多个处理单元,用于运行控制无线网络架构中多个传感器节点并且确定多个传感器节点位置的指令、以及射频(RF)电路,用于将通信发送到多个传感器节点并且从多个传感器节点接收通信,其中多个传感器节点中的每个具有无线装置,无线装置具有发送器和接收器以能够在无线网络架构中与设备的RF电路双向通信。设备中的一个或多个处理单元被配置为运行指令以确定具有已知位置的第一多个无线传感器节点和具有未知位置的第二多个无线传感器节点之间的距离估计,确定针对每个距离估计的误差度量信息,基于误差度量信息自适应地选择距离估计,并且基于自适应地选择的距离估计确定第二多个无线传感器节点的位置信息。
在另一示例中,误差度量信息包括与具有已知位置的无线传感器节点和具有未知位置的无线传感器节点之间的每个距离估计相关的误差度量。
在另一示例中,设备中的一个或多个处理单元进一步配置成运行指令以将每个误差度量与误差阈值进行比较,并且基于小于或等于误差阈值的误差度量自适应地选择用于定位的被确定距离估计子组。
在另一示例中,设备中的一个或多个处理单元被配置为运行指令以基于被确定距离估计子组确定用于定位的位置估计,其中至少一个距离估计和具有已知位置的相关无线传感器节点被排除用于确定位置估计。
在另一示例中,误差度量基于包括通信信号强度(RSSI)的信号或测距测量信号的接收质量来确定。
在另一示例中,具有已知位置的第一多个无线传感器节点与具有未知位置的第二多个无线传感器节点之间的距离估计包括第一多个无线传感器节点的第一节点与第二多个无线节点的第二节点之间的多个路径。
在另一示例中,一种用于定位无线网络架构中的节点的系统包括:第一多个无线传感器节点,第一多个无线传感器节点中的每个具有已知位置和无线装置,其中无线装置具有一个或多个处理单元和用于在无线网络结构中发送和接收通信的RF电路;第二多个无线传感器节点,第二多个无线传感器节点中的每个具有未知位置和无线装置,其中无线装置具有用于在无线网络架构中发送和接收通信的RF电路;以及远程装置,具有一个或多个处理单元。远程装置的一个或多个处理单元被配置为运行指令以确定第一多个无线传感器节点与第二多个无线传感器节点之间的用于定位的距离估计,确定针对每个距离估计的误差度量信息,以及基于误差度量信息自适应地选择用于定位的被确定距离估计。
在另一示例中,误差度量信息包括与具有已知位置的无线传感器节点和具有未知位置的无线传感器节点之间的每个距离估计相关的误差度量。
在另一示例中,远程装置的一个或多个处理单元被配置成运行指令以将每个误差度量与误差阈值进行比较,并且基于小于或等于误差阈值的误差度量自适应地选择用于定位的被确定距离估计子组。
在另一示例中,远程装置具有与无线网络架构的位置不同的位置。
在另一示例中,一种用于定位无线网络架构中的节点的系统,
包括:第一多个无线传感器节点,每个无线传感器节点具有已知位置并且包括具有一个或多个处理单元和RF电路的无线装置,RF电路用于在无线网络架构中传送和接收通信;以及第二多个无线传感器节点,每个无线传感器节点具有未知位置并且包括具有RF电路的无线装置,RF电路用于在无线网络架构中传送和接收通信,其中第一多个无线节点中无线传感器节点的一个或多个处理单元被配置为运行指令,在足以定位的时间段内将第二多个无线传感器节点配置为网状网络架构,确定第一多个无线传感器节点中的无线传感器节点和第二多个无线传感器节点中的每个之间的用于定位的距离估计,确定针对每个距离估计的误差度量信息,基于误差度量信息自适应地选择用于定位的被确定距离估计,以及在定位完成时将无线网络架构配置为树型网络架构。
在前述说明书中,已经参考本发明的特定示例性实施例描述了本发明。然而,明显的是,在不脱离本发明的更广泛的精神和范围的情况下可以对其进行各种修改和改变。因此,说明书和附图应被认为是说明性的而不是限制性的。
Claims (26)
1.一种用于定位无线网络架构中的节点的系统,包括:
第一多个无线传感器节点,所述第一多个无线传感器节点中的每个具有已知位置和无线装置,所述无线装置具有一个或多个处理单元和用于在所述无线网络架构中发送和接收通信的RF电路;以及
第二多个无线传感器节点,所述第二多个无线传感器节点中的每个具有未知位置和无线装置,所述无线装置具有用于在无线网络架构中发送和接收通信的RF电路,其中所述第一多个无线节点的无线传感器节点的所述一个或多个处理单元被配置为运行指令,以确定所述第一多个无线传感器节点与所述第二多个无线传感器节点之间的用于定位的距离估计,确定针对每个距离估计的误差度量信息,并且基于所述误差度量信息自适应地选择用于定位的被确定距离估计。
2.根据权利要求1所述的系统,其中所述误差度量信息包括与具有已知位置的无线传感器节点和具有未知位置的无线传感器节点之间的每个距离估计相关的误差度量。
3.根据权利要求2所述的系统,其中所述第一多个无线节点的无线传感器节点的一个或多个处理单元被配置为运行指令以将每个误差度量与误差阈值进行比较,并且基于小于或等于所述误差阈值的误差度量自适应地选择用于定位的被确定距离估计子组。
4.根据权利要求3所述的系统,其中所述第一多个无线节点的无线传感器节点的一个或多个处理单元配置成运行指令以基于所述被确定距离估计子组确定用于定位的位置估计,其中至少一个距离估计和具有已知位置的相关无线传感器节点被排除用于确定所述位置估计。
5.根据权利要求3所述的系统,其中所述误差阈值是基于环境、距离测量、优化过程被预定义的,或者是在所述定位期间自适应地定义的。
6.根据权利要求2所述的系统,其中所述第一多个无线节点的无线传感器节点的所述一个或多个处理单元被配置为运行指令以将每个误差度量与所述误差阈值进行比较,或者自适应地将加权因子应用于所述度量以淡化具有低距离测量质量的距离估计。
7.根据权利要求2所述的系统,其中所述第一多个无线节点的无线传感器节点的一个或多个处理单元被配置为运行指令以
通过使用以下中的至少两种重复地确定针对至少一个无线传感器节点的修正位置:所述第一多个节点的所述已知位置、来自所述第一和第二多个传感器节点之间定位的先前距离估计及其相关误差度量、所述第二多个节点的所述节点之间的重复距离估计、来自所述第一和第二多个传感器节点之间的定位或来自较早的修正位置的所述第二多个节点的所述估计位置,以及在每个修正定位阶段中自适应地选择用于定位的所述被确定的距离估计。
8.根据权利要求7所述的系统,其中所述第一多个无线节点的无线传感器节点的一个或多个处理单元被配置为运行指令以基于第一距离估计子组和相关误差度量或者基于第二距离估计子组和相关误差度量重复地确定至少一个无线传感器节点的定位。
9.一种用于定位无线网络架构中的无线传感器节点的计算机实施方法,包括:
确定具有已知位置的第一多个无线传感器节点中的每一个与具有未知位置的第二多个无线传感器节点中的每一个之间的距离估计;
确定针对每个距离估计的误差度量信息;
基于所述误差度量信息自适应地选择距离估计;以及
基于自适应地选择的距离估计确定针对所述第二多个无线传感器节点的位置信息。
10.根据权利要求9所述的计算机实施方法,其中所述误差度量信息包括与具有已知位置的无线传感器节点和具有未知位置的无线传感器节点之间的每个距离估计相关的误差度量。
11.根据权利要求10所述的计算机实施方法,进一步包括:
将每个误差度量与误差阈值进行比较,并且基于小于或等于所述误差阈值的误差度量自适应地选择用于定位的被确定距离估计子组。
12.根据权利要求11所述的计算机实施方法,进一步包括:
基于所述被确定距离估计子组确定用于定位的位置估计,其中至少一个距离估计和具有已知位置的相关无线传感器节点被排除用于确定所述位置估计。
13.根据权利要求10所述的计算机实施方法,其中所述误差阈值是基于环境、距离测量、优化过程被预定义的,或者是在所述定位期间自适应地定义的。
14.根据权利要求9所述的计算机实施方法,进一步包括:
利用被排除的至少一个距离估计和具有已知位置的相关无线传感器节点,或者利用具有修改作用的至少一个距离估计和具有已知位置的相关无线传感器节点,至少一次重复地确定针对所述第二多个无线传感器节点的位置信息。
15.根据权利要求10所述的计算机实施方法,其中所述误差度量包括基于具有已知位置的第一节点和具有未知位置的第二节点的距离估计与基于三角测量计算的所述第一节点和所述第二节点之间的距离之间的差值确定的误差度量。
16.根据权利要求10所述的计算机实施方法,其中基于所述位置信息的位置估计和所述无线网络架构的环境的先前信息确定所述误差度量,使得任何不利的距离估计被排除或者利用更高的误差度量来调整不利的距离估计的相关误差度量。
17.一种设备,包括:
存储器,用于存储指令;
一个或多个处理单元,用于运行用于控制无线网络架构中的多个传感器节点并且确定所述多个传感器节点的位置的指令;以及
射频(RF)电路,用于将通信发送到所述多个传感器节点以及从所述多个传感器节点接收通信,所述多个传感器节点中的每一个具有无线装置,所述无线装置具有发送器和接收器,以能够在所述无线网络架构中与所述设备的RF电路双向通信,其中所述设备的一个或多个处理单元被配置为运行指令以确定具有已知位置的第一多个无线传感器节点与具有未知位置的第二多个无线传感器节点之间的距离估计,确定针对每个距离估计的误差度量信息,基于所述误差度量信息自适应地选择距离估计,以及基于自适应地选择的距离估计确定所述第二多个无线传感器节点的位置信息。
18.根据权利要求17所述的设备,其中所述误差度量信息包括与具有已知位置的无线传感器节点和具有未知位置的无线传感器节点之间的每个距离估计相关的误差度量。
19.根据权利要求18所述的设备,其中所述设备中的所述一个或多个处理单元进一步配置成运行指令以将每个误差度量与误差阈值进行比较,并且基于小于或等于所述误差阈值的误差度量自适应地选择用于定位的被确定距离估计子组。
20.根据权利要求19所述的设备,其中所述设备中的所述一个或多个处理单元被配置为运行指令以基于所述被确定距离估计子组确定用于定位的位置估计,其中至少一个距离估计和具有已知位置的相关无线传感器节点被排除用于确定所述位置估计。
21.根据权利要求18所述的设备,其中所述误差度量基于包括通信信号强度(RSSI)的信号或测距测量信号的接收质量来确定。
22.根据权利要求17所述的设备,其中具有已知位置的第一多个无线传感器节点与具有未知位置的第二多个无线传感器节点之间的所述距离估计包括所述第一多个无线传感器节点的第一节点与所述第二多个无线节点的第二节点之间的多个路径。
23.一种用于定位无线网络架构中的节点的系统,包括:
第一多个无线传感器节点,所述第一多个无线传感器节点中的每个具有已知位置和无线装置,所述无线装置具有一个或多个处理单元和用于在所述无线网络架构中发送和接收通信的RF电路;
第二多个无线传感器节点,所述第二多个无线传感器节点中的每个具有未知位置和无线装置,所述无线装置具有用于在无线网络架构中发送和接收通信的RF电路;以及
远程装置,具有一个或多个处理单元,其中所述远程装置中的所述一个或多个处理单元被配置为运行指令以确定所述第一多个无线传感器节点与所述第二多个无线传感器节点之间的用于定位的距离估计,确定针对每个距离估计的误差度量信息,以及基于所述误差度量信息自适应地选择用于定位的被确定距离估计。
24.根据权利要求23所述的系统,其中所述误差度量信息包括与具有已知位置的无线传感器节点和具有未知位置的无线传感器节点之间的每个距离估计相关的误差度量。
25.根据权利要求24所述的系统,其中所述远程装置中的所述一个或多个处理单元配置成运行指令以将每个误差度量与误差阈值进行比较,并且基于小于或等于所述误差阈值的误差度量自适应地选择用于定位的被确定距离估计子组。
26.根据权利要求23所述的系统,其中所述远程装置具有与所述无线网络架构的位置不同的位置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/684,891 | 2017-08-23 | ||
| US15/684,891 US10575275B2 (en) | 2017-08-23 | 2017-08-23 | Systems and methods for adaptively selecting distance estimates for localization of nodes based on error metric information |
| PCT/US2018/047420 WO2019040556A1 (en) | 2017-08-23 | 2018-08-22 | SYSTEMS AND METHODS FOR ADAPTIVE SELECTION OF DISTANCE ESTIMATIONS FOR LOCATING NODES BASED ON ERROR MEASUREMENT INFORMATION |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN111033294A true CN111033294A (zh) | 2020-04-17 |
Family
ID=65436224
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880055011.6A Pending CN111033294A (zh) | 2017-08-23 | 2018-08-22 | 基于误差度量信息自适应地选择用于节点定位的距离估计的系统和方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10575275B2 (zh) |
| EP (1) | EP3707525B1 (zh) |
| JP (1) | JP7410851B2 (zh) |
| CN (1) | CN111033294A (zh) |
| FI (1) | FI3707525T3 (zh) |
| WO (1) | WO2019040556A1 (zh) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112040406A (zh) * | 2020-09-21 | 2020-12-04 | 武汉天喻聚联科技有限公司 | 基于蓝牙模块的组网内机柜定位方法及设备 |
| CN114089746A (zh) * | 2021-11-03 | 2022-02-25 | 西北工业大学 | 一种基于相对基准的跨无人平台协同定位方法 |
| CN114172836A (zh) * | 2020-08-19 | 2022-03-11 | 瞻博网络公司 | 利用具有路由反射的弹性算法 |
| CN115426615A (zh) * | 2022-07-21 | 2022-12-02 | 中山大学 | 基于5g毫米波通信的高精度时钟校准与定位测向方法 |
| CN116391134A (zh) * | 2020-10-12 | 2023-07-04 | 惠普发展公司,有限责任合伙企业 | 锚位置校准 |
Families Citing this family (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10757675B2 (en) | 2016-06-03 | 2020-08-25 | Locix, Inc. | Systems and methods for precise radio frequency localization in the presence of multiple communication paths |
| US10470156B2 (en) | 2016-06-03 | 2019-11-05 | Locix, Inc. | Systems and methods for coarse and fine time of flight estimates for precise radio frequency localization in the presence of multiple communication paths |
| US10455350B2 (en) | 2016-07-10 | 2019-10-22 | ZaiNar, Inc. | Method and system for radiolocation asset tracking via a mesh network |
| US10740503B1 (en) | 2019-01-17 | 2020-08-11 | Middle Chart, LLC | Spatial self-verifying array of nodes |
| US11625510B2 (en) | 2017-02-22 | 2023-04-11 | Middle Chart, LLC | Method and apparatus for presentation of digital content |
| US10740502B2 (en) | 2017-02-22 | 2020-08-11 | Middle Chart, LLC | Method and apparatus for position based query with augmented reality headgear |
| US11468209B2 (en) | 2017-02-22 | 2022-10-11 | Middle Chart, LLC | Method and apparatus for display of digital content associated with a location in a wireless communications area |
| US12086507B2 (en) | 2017-02-22 | 2024-09-10 | Middle Chart, LLC | Method and apparatus for construction and operation of connected infrastructure |
| US11900021B2 (en) | 2017-02-22 | 2024-02-13 | Middle Chart, LLC | Provision of digital content via a wearable eye covering |
| US11900022B2 (en) | 2017-02-22 | 2024-02-13 | Middle Chart, LLC | Apparatus for determining a position relative to a reference transceiver |
| US10575275B2 (en) | 2017-08-23 | 2020-02-25 | Locix, Inc. | Systems and methods for adaptively selecting distance estimates for localization of nodes based on error metric information |
| JP2020533569A (ja) * | 2017-09-06 | 2020-11-19 | ロシックス・インコーポレイテッド | 複数の通信経路が存在する場合の正確な無線周波数位置特定用の粗い飛行時間推定と細かい飛行時間推定のためのシステムおよび方法 |
| SE542201C2 (en) * | 2017-11-22 | 2020-03-10 | Nida Tech Sweden Ab | Method for determining a distance between two nodes |
| US10670709B2 (en) * | 2018-01-08 | 2020-06-02 | Intel Corporation | Drone localization |
| US11260809B2 (en) | 2018-01-18 | 2022-03-01 | Tesla, Inc. | Wiring system architecture |
| US11479189B2 (en) * | 2018-02-12 | 2022-10-25 | Tesla, Inc. | High-speed-wiring-system architecture |
| CA3104281A1 (en) * | 2018-06-20 | 2019-12-26 | Alarm.Com Incorporated | Device location network |
| US20210314895A1 (en) * | 2018-08-10 | 2021-10-07 | Lg Electronics Inc. | Method and apparatus for adjusting transmission timing by anchor node in wireless communication system |
| US11327147B2 (en) * | 2018-12-26 | 2022-05-10 | Locix, Inc. | Systems and methods for determining locations of wireless sensor nodes based on anchorless nodes and known environment information |
| US11255980B2 (en) * | 2019-06-28 | 2022-02-22 | Sony Corporation | Collaborative positioning |
| CA3148476C (en) * | 2019-07-08 | 2024-06-11 | Middle Chart, LLC | Spatially self-verifying array of nodes |
| US11343646B2 (en) * | 2019-08-23 | 2022-05-24 | Samsung Electronics Co., Ltd. | Method and apparatus for localization |
| US11640486B2 (en) | 2021-03-01 | 2023-05-02 | Middle Chart, LLC | Architectural drawing based exchange of geospatial related digital content |
| CN111432368B (zh) * | 2020-03-31 | 2022-10-21 | 中国人民解放军国防科技大学 | 一种适用于稀疏锚节点wsn的测距定位方法 |
| US11490458B2 (en) | 2020-08-04 | 2022-11-01 | Abl Ip Holding Llc | Wireless hub emulator |
| US11317442B2 (en) * | 2020-08-07 | 2022-04-26 | Abl Ip Holding Llc | Non-coordinated back-off timer assignment |
| DE102020211165A1 (de) | 2020-09-04 | 2022-03-10 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zum Bestimmen der Position eines Objekts |
| US11800484B2 (en) | 2020-11-24 | 2023-10-24 | Telefonaktiebolaget Lm Ericsson (Publ) | User equipment (UE) positioning |
| US11778583B2 (en) | 2021-03-31 | 2023-10-03 | Landis+Gyr Innovations, Inc. | Autonomous geographical location determination using mesh network |
| US11716639B2 (en) | 2021-08-10 | 2023-08-01 | Abl Ip Holding Llc | Self-healing of repeater formation in a network |
| CN113777557B (zh) * | 2021-09-26 | 2023-09-15 | 北方工业大学 | 基于冗余距离筛选的uwb室内定位方法及系统 |
| CN114786253A (zh) * | 2022-04-02 | 2022-07-22 | 广州杰赛科技股份有限公司 | 无线传感网的失效区域的定位方法、装置、介质及设备 |
| WO2024035713A1 (en) * | 2022-08-08 | 2024-02-15 | Interdigital Patent Holdings, Inc. | Prevention of error propagation for sidelink positioning |
| WO2024167458A1 (en) * | 2023-02-10 | 2024-08-15 | Telefonaktiebolaget Lm Ericsson (Publ) | Systems and methods for improved positioning |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006003187A (ja) * | 2004-06-17 | 2006-01-05 | Hitachi Ltd | 無線ネットワークシステム |
| US20080032708A1 (en) * | 2006-08-03 | 2008-02-07 | Ismail Guvenc | Method for estimating jointly time-of-arrival of signals and terminal location |
| JP2009074974A (ja) * | 2007-09-21 | 2009-04-09 | Kyocera Corp | 移動局および位置導出方法 |
| JP2012083136A (ja) * | 2010-10-07 | 2012-04-26 | Oki Electric Ind Co Ltd | バイアス誤差推定装置、バイアス誤差推定方法及び位置推定装置 |
| CN103607770A (zh) * | 2013-11-14 | 2014-02-26 | 南京邮电大学 | 一种无线传感器网络定位中高精度距离估计方法 |
| WO2017031248A1 (en) * | 2015-08-19 | 2017-02-23 | Dragonfly Technology Inc. | Systems and methods for determining locations of wireless sensor nodes in a network architecture having mesh-based features for localization |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3777299B2 (ja) | 2000-11-20 | 2006-05-24 | 日本電信電話株式会社 | 無線移動端末の位置検出方法 |
| JP4349758B2 (ja) | 2001-03-27 | 2009-10-21 | パイオニア株式会社 | 位置測位装置 |
| EP1388016A1 (en) * | 2001-03-28 | 2004-02-11 | Norwood Systems Pty Ltd. | A wireless communications network |
| US7359718B2 (en) | 2004-04-30 | 2008-04-15 | Hong Kong Applied Science And Technology Research Institute Co., Ltd. | Location determination and location tracking in wireless networks |
| KR100577682B1 (ko) | 2004-06-04 | 2006-05-10 | 삼성전자주식회사 | 노드들로 구성된 통신 시스템에서 거리 추정 장치 및 방법 |
| US7970574B2 (en) * | 2005-06-22 | 2011-06-28 | The Board Of Trustees Of The Leland Stanford Jr. University | Scalable sensor localization for wireless sensor networks |
| US7856234B2 (en) | 2006-11-07 | 2010-12-21 | Skyhook Wireless, Inc. | System and method for estimating positioning error within a WLAN-based positioning system |
| JP2009065394A (ja) | 2007-09-05 | 2009-03-26 | Meiji Univ | センサネットワーク用減衰定数推定システム、ノード位置推定システム、推定方法、及びそのプログラム |
| US8165150B2 (en) | 2008-12-17 | 2012-04-24 | Avaya Inc. | Method and system for wireless LAN-based indoor position location |
| US8102784B1 (en) * | 2009-02-18 | 2012-01-24 | Dust Networks, Inc. | Localization in a network |
| US8054226B2 (en) | 2009-03-31 | 2011-11-08 | Mitsubishi Electric Research Laboratories, Inc. | Method for estimating location of nodes in wireless networks |
| KR101440836B1 (ko) * | 2010-07-08 | 2014-11-04 | 에스케이텔레콤 주식회사 | 무선랜 신호를 이용한 측위 오차 판별 방법 및 장치 |
| US9197996B2 (en) * | 2010-11-19 | 2015-11-24 | Commonwealth Scientific And Industrial Research Organisation | Tracking location of mobile device in a wireless network |
| EP3251425A4 (en) * | 2015-01-27 | 2019-01-09 | Locix Inc. | SYSTEMS AND METHOD FOR PROVIDING WIRELESS SENSOR NETWORKS WITH ASYMMETRIC NETWORK ARCHITECTURE |
| US10470156B2 (en) | 2016-06-03 | 2019-11-05 | Locix, Inc. | Systems and methods for coarse and fine time of flight estimates for precise radio frequency localization in the presence of multiple communication paths |
| US10757675B2 (en) | 2016-06-03 | 2020-08-25 | Locix, Inc. | Systems and methods for precise radio frequency localization in the presence of multiple communication paths |
| US10575275B2 (en) | 2017-08-23 | 2020-02-25 | Locix, Inc. | Systems and methods for adaptively selecting distance estimates for localization of nodes based on error metric information |
-
2017
- 2017-08-23 US US15/684,891 patent/US10575275B2/en active Active
-
2018
- 2018-08-22 EP EP18847901.8A patent/EP3707525B1/en active Active
- 2018-08-22 CN CN201880055011.6A patent/CN111033294A/zh active Pending
- 2018-08-22 FI FIEP18847901.8T patent/FI3707525T3/fi active
- 2018-08-22 WO PCT/US2018/047420 patent/WO2019040556A1/en unknown
- 2018-08-22 JP JP2020510547A patent/JP7410851B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006003187A (ja) * | 2004-06-17 | 2006-01-05 | Hitachi Ltd | 無線ネットワークシステム |
| US20080032708A1 (en) * | 2006-08-03 | 2008-02-07 | Ismail Guvenc | Method for estimating jointly time-of-arrival of signals and terminal location |
| JP2009074974A (ja) * | 2007-09-21 | 2009-04-09 | Kyocera Corp | 移動局および位置導出方法 |
| JP2012083136A (ja) * | 2010-10-07 | 2012-04-26 | Oki Electric Ind Co Ltd | バイアス誤差推定装置、バイアス誤差推定方法及び位置推定装置 |
| CN103607770A (zh) * | 2013-11-14 | 2014-02-26 | 南京邮电大学 | 一种无线传感器网络定位中高精度距离估计方法 |
| WO2017031248A1 (en) * | 2015-08-19 | 2017-02-23 | Dragonfly Technology Inc. | Systems and methods for determining locations of wireless sensor nodes in a network architecture having mesh-based features for localization |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114172836A (zh) * | 2020-08-19 | 2022-03-11 | 瞻博网络公司 | 利用具有路由反射的弹性算法 |
| CN114172836B (zh) * | 2020-08-19 | 2024-05-14 | 瞻博网络公司 | 用于路由反射的路由反射器、计算机可读介质和方法 |
| CN112040406A (zh) * | 2020-09-21 | 2020-12-04 | 武汉天喻聚联科技有限公司 | 基于蓝牙模块的组网内机柜定位方法及设备 |
| CN116391134A (zh) * | 2020-10-12 | 2023-07-04 | 惠普发展公司,有限责任合伙企业 | 锚位置校准 |
| CN114089746A (zh) * | 2021-11-03 | 2022-02-25 | 西北工业大学 | 一种基于相对基准的跨无人平台协同定位方法 |
| CN115426615A (zh) * | 2022-07-21 | 2022-12-02 | 中山大学 | 基于5g毫米波通信的高精度时钟校准与定位测向方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10575275B2 (en) | 2020-02-25 |
| EP3707525A4 (en) | 2021-05-05 |
| EP3707525A1 (en) | 2020-09-16 |
| FI3707525T3 (fi) | 2024-10-10 |
| US20190069263A1 (en) | 2019-02-28 |
| JP7410851B2 (ja) | 2024-01-10 |
| JP2020531824A (ja) | 2020-11-05 |
| EP3707525B1 (en) | 2024-07-10 |
| WO2019040556A1 (en) | 2019-02-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7410851B2 (ja) | 誤差指標情報に基づいてノードの位置特定のための距離推定値を適応的に選択するためのシステムおよび方法 | |
| CN109565767B (zh) | 在存在多个通信路径下用于精确射频定位的系统和方法 | |
| US10802104B2 (en) | Systems and methods for using ranging and triangulation to determine locations of wireless sensor nodes based on radio frequency communications between the nodes and various RF-enabled devices | |
| US10104508B2 (en) | Systems and methods for determining locations of wireless sensor nodes in a tree network architecture having mesh-based features | |
| US9846220B2 (en) | Systems and methods for determining locations of wireless sensor nodes in a network architecture having mesh-based features for localization | |
| US10470156B2 (en) | Systems and methods for coarse and fine time of flight estimates for precise radio frequency localization in the presence of multiple communication paths | |
| CN111052819A (zh) | 在存在多个通信路径的情况下进行精确射频定位的粗略和精细飞行时间估计的系统和方法 | |
| CN110998354A (zh) | 使用到达时间差进行精确射频定位的系统和方法 | |
| JP7372906B2 (ja) | 非連続または不連続チャネルを使用した正確な無線周波数位置特定のためのシステムおよび方法 | |
| WO2017031248A1 (en) | Systems and methods for determining locations of wireless sensor nodes in a network architecture having mesh-based features for localization | |
| CN113474671A (zh) | 使用时间扫描的到达时间差进行精确射频定位的系统和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WD01 | Invention patent application deemed withdrawn after publication | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20200417 |