JP2012083136A - バイアス誤差推定装置、バイアス誤差推定方法及び位置推定装置 - Google Patents
バイアス誤差推定装置、バイアス誤差推定方法及び位置推定装置 Download PDFInfo
- Publication number
- JP2012083136A JP2012083136A JP2010227708A JP2010227708A JP2012083136A JP 2012083136 A JP2012083136 A JP 2012083136A JP 2010227708 A JP2010227708 A JP 2010227708A JP 2010227708 A JP2010227708 A JP 2010227708A JP 2012083136 A JP2012083136 A JP 2012083136A
- Authority
- JP
- Japan
- Prior art keywords
- observation
- error
- bias
- distances
- base stations
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Abstract
【課題】観測距離に含まれる観測誤差の分布のピーク値の正方向のずれであるバイアス量を、複数の観測距離を用いて推定する。
【解決手段】バイアス誤差推定装置は、位置が既知である複数の基地局20a、20b、20cと、位置が未知である移動局10との距離である複数の観測距離に基づき基準位置を算出し、該基準位置から前記複数の基地局までの距離と前記複数の観測距離の差分を観測誤差として複数算出する処理を、所定回数を上回るまで繰り返す観測誤差算出部32と、観測誤差算出部による繰り返し処理の結果得られた複数の観測誤差に基づき、該観測誤差分布上の単峰性の山のピークの観測誤差0からのずれであるバイアス量を推定するバイアス推定部34とを備える。
【選択図】図4
【解決手段】バイアス誤差推定装置は、位置が既知である複数の基地局20a、20b、20cと、位置が未知である移動局10との距離である複数の観測距離に基づき基準位置を算出し、該基準位置から前記複数の基地局までの距離と前記複数の観測距離の差分を観測誤差として複数算出する処理を、所定回数を上回るまで繰り返す観測誤差算出部32と、観測誤差算出部による繰り返し処理の結果得られた複数の観測誤差に基づき、該観測誤差分布上の単峰性の山のピークの観測誤差0からのずれであるバイアス量を推定するバイアス推定部34とを備える。
【選択図】図4
Description
本発明は、バイアス誤差推定装置、バイアス誤差推定方法及び位置推定装置に関する。
従来から、複数の基地局と移動局との間で無線信号を送受信し、移動局の位置を推定するシステムが提案されている。例えば、複数の基地局と移動局との無線通信の結果、いずれかの局から発信された無線信号の発信時刻や、いずれかの局にて受信された無線信号の受信時刻に基づいて移動局の位置を推定するシステムが提案されている。
無線信号を用いた位置推定方式の代表的なものとして、特許文献1には、主に無線信号の受信強度を用いて移動局の位置を推定するRSSI(Received Signal Strength Indicator)方式が開示されている。また、特許文献2には、信号の伝搬時間を用いて移動局の位置を推定するTOA(Time Of Arrival)方式が開示されている。
RSSI方式は、無線信号の受信強度から機器間の距離を推定し、機器間の推定距離に基づき3辺測量で移動局の位置を推定する。この方式では、高精度な距離の推定が難しい一方、厳密かつ高精度な時刻管理が不要なため様々な機器に搭載されやすいという特徴がある。
TOA方式は、無線信号の伝搬時間(到来時刻)から機器間の距離を計測し、計測された機器間の距離に基づき3辺測量で移動局の位置を推定する。例えば、移動局から基地局に向かって無線信号を送信した際の信号の伝搬時間をtとし、信号の伝搬速度をcとすると、基地局と移動局間の距離lは、l=c×tの式に基づき算出される。なお、送信信号には通信方向が逆のものや双方向通信のものが含まれる。
無線信号の一例として電波を媒体とした場合について考える。一般に、空気中の電波の伝搬速度は一定(約30万km/秒)のため、時計の精度が十分に高ければ安定した位置精度を実現しやすい。例えば、移動局と基地局のすべての時計が同期している場合、伝搬時間tの計測は1回の通信で行える。他にも同期なしで距離を算出する方法もあるが、その場合には、移動局から発信した電波が基地局に到着し、更に基地局から移動局に戻った電波を検出する必要があるため、処理の負荷が高くなる。
例えば、TOA方式で用いられる測距の一方式であるTWR(Two Way Ranging)方式では、移動局が基地局に信号を送出し、その信号を受信した基地局は直ちに移動局に返信を行い、移動局は、自局が信号を送出してから基地局からの信号を受信するまでの往復伝搬時間に基づき基地局で折り返しに必要な処理時間を減算して2で割ることにより、片道にかかった伝搬時間を算出する。しかしながら、TWR方式では、信号の伝搬時間を計測するために、高精度な内部時計が必要となる。例えば電波を用いた場合、約1nsの時刻誤差で約30cmの距離誤差が生じる。
これらの無線信号を用いた位置推定方式の共通の課題として、観測値に含まれるノイズ(観測誤差)が挙げられる。主なノイズの要因としては、基地局の送受信のタイミング計測とサンプリング間隔に起因するものや、クロックの精度に起因するランダム的な誤差値、電波が端末から見通し外(NLOS:None Line of Sight)の伝搬路を通って到来するマルチパス(反射波)による影響、アンテナ(音波の場合はマイクロフォン等)から受信した信号を検波し、受信時間を付与する部分までの無線機器内の伝搬路による伝搬時間等が考えられる。
「「NLOS環境に適した低複雑度TOA位置推定アルゴリズム」電子情報通信学会技術研究報告、USN、ユビキタス・センサネットワーク107(152)、69−74、2007−07−12」には、移動局と基地局の間の距離をTOA方式により計測する測位システムにおいて、移動局と基地局の間に見通しがある場合の観測誤差の分布は、標準正規分布に従い発生し、移動局と基地局の間に見通しがない場合の観測誤差の分布は、標準正規分布に加え、0から取りうる反射経路の最大値を上限とする一様分布に従って発生すると記載されている。
「「TOAデータに基づく屋内高精度位置推定アルゴリズムの研究」日本計算機統計学会シンポジウム論文集23、31−34、2009−11−07」には、移動局と基地局の間の距離が既知である複数のポイントにおいて、TOA方式による測位システムを用いて局間の距離を計測し、実際の距離から観測誤差を算出すると、観測誤差は単峰性の分布で正の偏りを示し、非常に大きい正の値まで裾を引く分布が得られたことが開示されている。
以上から、移動局と基地局の間の距離をTOA方式で計測した場合に含まれる観測誤差の分布は、単峰性で正方向に非常に大きな値まで裾を引いていること、また、実際に測位システムを用いて観測した場合、山のピーク値が正方向にずれる(すなわち、バイアス量を持つ)ことがわかった。
バイアス量を推定するための方法として、特開平05−53648号公報では、センサのバイアス誤差推定方法にバイアス誤差の正解と見込まれる値(初期状態においてバイアス誤差の正解と見込まれる値)を用いる。このバイアス誤差推定方法では、第1の観測器及び第2の観測器から観測行列を作る。さらに、観測位置の誤差評価を行って観測雑音の共分散行列を求め、観測行列と共分散行列とから推定行列を演算し、第1のセンサと第2のセンサの位置と、バイアス誤差の初期値を設定することにより推定行列を算出し、第1のセンサと第2のセンサのバイアス誤差を推定する。
しかし、上記推定方法では、バイアス誤差を推定するために予めバイアス誤差の初期値(バイアス誤差の正解と見込まれる値)を設定しておき、バイアス誤差の初期値を用いて観測値をキャリブレーション(校正)する必要があった。
上記課題に対して、本発明の目的とするところは、観測距離に含まれる観測誤差のうち、観測誤差分布のピーク値の正方向のずれであるバイアス量を、複数の観測距離を用いて推定することが可能な、バイアス誤差推定装置、バイアス誤差推定方法及び位置推定装置を提供することにある。
上記課題を解決するために、本発明のある観点によれば、位置が既知である複数の基地局と、位置が未知である移動局との距離である複数の観測距離に基づき基準位置を算出し、該基準位置から前記複数の基地局までの距離と前記複数の観測距離との差分を観測誤差として複数算出する処理を、所定回数を上回るまで繰り返す観測誤差算出部と、前記観測誤差算出部による繰り返し処理の結果得られた複数の観測誤差に基づき、該観測誤差分布上の単峰性の山のピークの観測誤差0からのずれであるバイアス量を推定するバイアス推定部と、を備えることを特徴とするバイアス誤差推定装置が提供される。
観測誤差は、前記バイアス量と、観測誤差分布上の裾野の広い部分の誤差量と、該観測誤差分布上の単峰性の山の幅方向の誤差量とから主に構成され、前記観測誤差算出部による観測誤差の算出処理を、前記所定回数を上回るまで繰り返すことにより、前記推定されたバイアス量に含まれる前記該観測誤差分布上の裾野の広い部分の誤差量及び前記観測誤差分布上の単峰性の山の幅方向の誤差量を低減してもよい。
前記バイアス推定部は、前記観測誤差算出部により算出された複数の観測誤差の中央値を算出し、該中央値をバイアス量として推定してもよい。
前記複数の基地局と前記移動局との間を一方向又は双方向により取得した信号に基づき、前記複数の基地局と前記移動局との距離である前記複数の観測距離を測定する前記距離計測部を更に備えてもよい。
前記観測誤差算出部は、前記複数の観測距離に基づき、該複数の観測距離の一部または全てを用いて前記基準位置を算出してもよい。
前記観測誤差算出部により算出された各基地局の観測誤差を複数時刻分記憶する観測誤差記憶部を更に備え、前記バイアス推定部は、前記観測誤差記憶部に記憶された複数時刻分の各基地局の観測誤差に基づき、前記バイアス量を推定してもよい。
また、上記課題を解決するために、本発明の別の観点によれば、位置が既知である複数の基地局と、位置が未知である移動局との距離である複数の観測距離に基づき基準位置を算出し、該基準位置から前記複数の基地局までの距離と前記複数の観測距離の差分を観測誤差として複数算出する処理を、所定回数を上回るまで繰り返す観測誤差算出ステップと、前記観測誤差算出ステップによる繰り返し処理の結果得られた複数の観測誤差に基づき、該観測誤差分布上の単峰性の山のピークの観測誤差0からのずれであるバイアス量を推定するバイアス推定ステップと、を含むことを特徴とするバイアス誤差推定方法が提供される。
また、上記課題を解決するために、本発明の別の観点によれば、位置が既知である複数の基地局と、位置が未知である移動局との距離である複数の観測距離に基づき基準位置を算出し、該基準位置から前記複数の基地局までの距離と前記複数の観測距離の差分を観測誤差として複数算出する処理を、所定回数を上回るまで繰り返す観測誤差算出部と、前記観測誤差算出部による繰り返し処理の結果得られた複数の観測誤差に基づき、該観測誤差分布上の単峰性の山のピークの観測誤差0からのずれであるバイアス量を推定するバイアス推定部と、前記バイアス推定部により推定されたバイアス量に基づき、前記複数の観測距離のそれぞれを補正する観測距離補正部と、前記補正後の複数の観測距離に基づき、移動局の位置を推定する推定位置算出部と、を備えることを特徴とする位置推定装置が提供される。
前記観測距離補正部は、前記複数の観測距離と前記推定されたバイアス量との差分を前記補正後の複数の観測距離として算出してもよい。
また、上記課題を解決するために、本発明の別の観点によれば、位置が既知である複数の基地局と、位置が未知である移動局との距離である複数の観測距離を複数算出する処理を、所定回数を上回るまで繰り返し、繰り返した結果得られた前記複数の観測距離の平均値又は中央値と、前記複数の基地局と前記移動局との距離である複数の観測距離に基づき算出された基準位置とに基づき複数の観測誤差を算出する観測誤差算出部と、
前記算出された複数の観測誤差に基づき、該観測誤差分布上の単峰性の山のピークの観測誤差0からのずれであるバイアス量を推定するバイアス推定部と、を備えることを特徴とするバイアス誤差推定装置が提供される。
前記算出された複数の観測誤差に基づき、該観測誤差分布上の単峰性の山のピークの観測誤差0からのずれであるバイアス量を推定するバイアス推定部と、を備えることを特徴とするバイアス誤差推定装置が提供される。
以上説明したように、本発明によれば、複数の観測値を用いて観測値に含まれる観測誤差のうち、観測誤差分布のピーク値の正方向のずれであるバイアス量を推定することができる。これにより、バイアス誤差の初期値を求めるための事前の測定を不要とすることができる。
以下に添付図面を参照しながら、本発明の実施形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
(観測誤差)
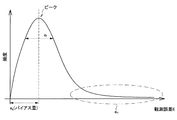
電波等を利用して移動局と基地局の間の距離を計測した場合、その計測距離の誤差分布は、図5に示したように単峰性の分布となる。この誤差分布には、図5のeb、er、enで示される3種類の観測誤差が主に含まれるものと考えられる。
電波等を利用して移動局と基地局の間の距離を計測した場合、その計測距離の誤差分布は、図5に示したように単峰性の分布となる。この誤差分布には、図5のeb、er、enで示される3種類の観測誤差が主に含まれるものと考えられる。
観測誤差の分布に現れる観測誤差の山のピークは、観測誤差0に対して正の方向にずれている。このずれ量をバイアス量ebと呼ぶ。バイアス量ebは、例えば、移動局で発信時刻を付与してからアンテナより信号を送信するまでの無線機器内の伝搬路による伝搬時間と、基地局でアンテナから受信した信号を検波し、受信時刻を付与する部分までの無線機器内の伝搬路による伝搬時間に含まれるバイアス的な誤差量である。
観測誤差の分布は、正の方向に裾を引くように非常に大きい値まで裾野の広い分布となっている。このような分布は、NLOS環境等でよく見られる現象である。よって、この部分に含まれる観測誤差enは、無線電波の伝搬路が反射によって伸びてしまうことにより生じる誤差量が主な原因であると仮定することができる。
単峰性の山の幅方向の観測誤差erは、基地局の送受信のタイミング計測とサンプリング間隔に起因するものや、クロックの精度に起因するランダム的な誤差量が主な原因であると考えられる。
裾野部分の観測誤差enは非常に大きな異常値をとるが、移動局と基地局がLOS環境にある場合には、その発生回数は極めて稀であるため、観測値の中央値を取る等により異常値として排除することができる。また、観測誤差erは、正規分布に従って発生すると考えられるため、同一地点で複数回距離を計測した観測値の平均値をとることにより除去することができる。一方、バイアス量ebは、観測距離にかかわらず一定量含まれるため、推定しないと除去できない値である。バイアス量ebは、本発明の実施形態において推定対象となる誤差である。
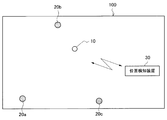
3辺測量によって移動局の位置を求める場合、3局以上の基地局が必要となる。例えば、図6に示したように、3つの基地局20a、20b、20cを用いて移動局10の位置を推定する。測位システムによって観測された基地局20a、20b、20cと移動局10の距離に誤差が含まれていない場合、基地局のそれぞれを中心に観測距離で描いた円は1点で交わるため、その交点を移動局10の位置と推定できる。
しかし、観測値には観測誤差が含まれている。例えば、図6の誤差が含まれない理想上の観測距離r1、r2、r3に対して、図3には観測誤差を含んだ観測距離r1’、r2’、r3’が示されている。観測距離r1’、r2’、r3’に基づいて位置推定を行うと、各基地局20a、20b、20cを中心に、半径が観測距離r1’、r2’、r3’の円をそれぞれ描き、3つの円は1点に交わらない。そのため、最小二乗法や円の交点を利用して幾何学的に移動局の位置を推定する方法が多く取られている。観測距離に誤差が多く含まれるほど、図3に示す3つの円が重なる面積は大きくなり、最小二乗法や幾何学的に位置を推定する方法での位置推定精度は劣化する。
そのため、観測距離に含まれる誤差を除去して位置推定の精度を向上させる方法が取られている。誤差を除去する際、前述したように、3つの誤差量のうちランダム的な誤差erと伝搬路が伸びることによる誤差enは容易に除去することができるが、バイアス量を推定することは非常に困難である。しかし、バイアス量は数mオーダーで観測値に含まれるため、高精度な位置推定を行うためには無視できないほど大きい誤差である。
バイアス量を推定する方法の一例としては、移動局と基地局の無線通信とは別に、位置が既知である基地局同士で通信を行い、得られた観測距離と実際の距離を差し引くことによって観測誤差を求め、求められた観測誤差を、基地局と移動局の間の観測距離に含まれるバイアス量として推定する方法である。しかし、この推定方法では、前提として移動局と基地局が同一のバイアス量を持つ(同一のデバイスである)必要があり、通信する基地局間に見通しが必要であり、かつ、基地局間で通信するための機能を持たなければならない等の問題がある。
基地局との距離が既知であるポイントに移動局を配置し、測位システムにより観測距離を求め、観測誤差を算出することにより、予めバイアス量を推定する方法もある。この推定方法では、基地局のアンテナを特性の異なるものに変更した場合、アンテナから受信した信号が検波され、受信時刻を付与する部分まで無線機器内の伝搬路を伝搬する伝搬時間は異なってしまうため、再度事前に計測を行い、バイアス量の正解値(初期値)を設定する必要がある。移動局のアンテナを特性の異なるものに変更した場合も同様に、再度事前測定を行う必要がある。
これに対して、以下に説明するように、本実施形態では、バイアス量を推定するために、バイアス量の正解値(初期値)を必要としない。さらに、本実施形態では、推定されたバイアス量を用いて観測距離からバイアス量を取り除くことにより、高い精度で移動局の位置を推定する方法を提案する。
(位置推定システム)
まず、本発明の一実施形態に係る位置推定システムの概略構成について図1を参照しながら説明する。位置推定システム100は、移動局10と、3つの基地局20a、20b、20cと、位置検知装置30とを有している。ここでは、移動局10が常に静止状態であると仮定した場合について説明する。なお、ここでは移動局10は1局であるが、移動局は複数でもよい。また、基地局も3局以上であれば何局であってもよい。移動局10は、本実施形態に係る位置推定方法により、位置を推定する対象物である。基地局20a、20b、20cの位置は既知である。移動局10、基地局20a、20b、20c及び位置検知装置30は、一方向又は双方向通信が可能であり、無線通信によりデータを送受信することができる。
まず、本発明の一実施形態に係る位置推定システムの概略構成について図1を参照しながら説明する。位置推定システム100は、移動局10と、3つの基地局20a、20b、20cと、位置検知装置30とを有している。ここでは、移動局10が常に静止状態であると仮定した場合について説明する。なお、ここでは移動局10は1局であるが、移動局は複数でもよい。また、基地局も3局以上であれば何局であってもよい。移動局10は、本実施形態に係る位置推定方法により、位置を推定する対象物である。基地局20a、20b、20cの位置は既知である。移動局10、基地局20a、20b、20c及び位置検知装置30は、一方向又は双方向通信が可能であり、無線通信によりデータを送受信することができる。
基地局20a、20b、20cは、例えば、屋内の無線LAN(Local AreaNetwork)の基地局や携帯電話の基地局等であってもよい。基地局20a、20b、20cは、各基地局の位置を知る方法があれば、固定される必要はなく、移動局10と同様に可動式の形態を有していてもよい。
移動局10としては、PC(Personal Computer)やセンサーネットワークのノード、携帯電話、PDA(Personal Digital Assistant)、アクティブタグ等、様々な形態への適用が可能である。
位置検知装置30は、各基地局20a、20b、20cと移動局10との間の距離を測定する。位置検知装置30は、移動局10の位置を推定する位置推定装置の一例である。位置推定装置は、単独で存在していてもよく、基地局20a、20b、20cに内蔵され、基地局20a、20b、20cと一体となっていてもよく、移動局10に内蔵され、移動局10と一体となっていてもよい。位置検知装置30は、基地局20a、20b、20c及び移動局10と通信可能な図示しないサーバに内蔵されてもよい。したがって、位置推定装置は、位置検知装置30として存在していてもよく、基地局20a、20b、20cとして存在していてもよく、移動局10として存在していてもよく、図示しないサーバとして存在していてもよい。さらに、基地局20a、20b、20cは、観測誤差特性の同じ複数のデバイスで構成されている場合に限られず、観測誤差特性の異なる複数のデバイスで構成されていてもよい。その場合には、基地局毎にデバイスIDを付与するなどして、デバイス毎に以下の処理を行えばよい。
[位置検知装置の機能構成]
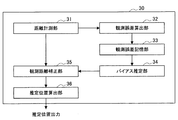
次に、本実施形態に係る位置検知装置30の機能構成について図2を参照しながら説明する。位置検知装置30は、距離計測部31、観測誤差算出部32、観測誤差記憶部33、バイアス推定部34、観測距離補正部35及び推定位置算出部36を有する。なお、距離計測部31、観測誤差算出部32、観測誤差記憶部33、バイアス推定部34の機能構成は、バイアス誤差推定装置の機能として、観測距離補正部35及び推定位置算出部36の機能構成を有する装置と別体の装置とすることもできる。
次に、本実施形態に係る位置検知装置30の機能構成について図2を参照しながら説明する。位置検知装置30は、距離計測部31、観測誤差算出部32、観測誤差記憶部33、バイアス推定部34、観測距離補正部35及び推定位置算出部36を有する。なお、距離計測部31、観測誤差算出部32、観測誤差記憶部33、バイアス推定部34の機能構成は、バイアス誤差推定装置の機能として、観測距離補正部35及び推定位置算出部36の機能構成を有する装置と別体の装置とすることもできる。
距離計測部31は、3つの基地局20a、20b、20cと移動局10との一方向又は双方向通信により取得した所定の信号に基づき、各基地局20a、20b、20cと移動局10との距離をそれぞれ計測する。所定の信号は、一方向又は双方向通信の結果である無線信号の受発信時刻や、基地局側での受信時刻の情報を含み、これらの情報に基づき各基地局20a、20b、20cと移動局10との距離を計測する。本実施形態では、移動局10は常に静止状態であることから、任意の観測時間幅tの移動局と各基地局との距離をまとめて扱うことができる。また、本実施形態では、3つの基地局20a、20b、20cは同一のデバイスを用いることができ、同一デバイスによる個体差はないものとする。
計測には、RSSI方式、TOA方式、TDOA(Time Difference Of Arrival)方式、AOA(Angle Of Arrival)方式、TOA方式で用いられる測距の一方式であるTWR方式等、いずれの方式も使用することができる。
RSSI方式は、例えば特開2009−85780号公報等に記載されているように、主に無線信号の受信強度を用いて移動局の位置を推定する。TOA方式は、例えば特開2001−275148号公報等に記載されているように、無線信号の伝搬時間(到来時刻)から機器間の距離を計測し、そこから3辺測量で位置を推定する。
TDOA(Time Difference Of Arrival)方式は、TOA方式と同様に信号の伝搬時間をベースとしているが、基地局と移動局の距離を計測せずに、移動局からマルチキャストで発信された信号を同時に複数の基地局にて受信し、その受信時間差に基づいて位置を推定する。
AOA方式は、複数の基地局が移動局から信号を受信した際の信号の到達角度に基づき、三角測量を行うことにより位置を推定する。TWR(Two Way Ranging)方式では、移動局が基地局に信号を送出し、その信号を受信した基地局は直ちに移動局に返信を行い、移動局は、自局が信号を送出してから基地局からの信号を受信するまでの往復伝搬時間に基づき基地局で折り返しに必要な処理時間を減算して2で割ることにより、片道にかかった伝搬時間を算出する。TDOA方式とAOA方式との組合せ等、各方式の組合せも可能である。

観測誤差Ei,tは、以下の3つの誤差により構成されると考えられる。図5には、その3つの誤差量er、eb、enが模式的に図示されている。一つ目は、サンプリング間隔やクロック精度によるランダム的な誤差量er(i,t)(iは基地局数:1〜3、tは時刻:t>0)である。2つ目は、アンテナと送受信時刻を付与する部分までの無線機器内の伝搬路によるバイアス的な誤差量(バイアス量)eb(i,t)(iは基地局数:1〜3、tは時刻:t>0)である。3つ目は、NLOS環境で多く見られる無線電波の伝搬路が反射によって伸びてしまうことによる非常に大きな誤差量en(i,t)(iは基地局数:1〜3、tは時刻:t>0)である。以上3つの特性の異なる誤差により観測誤差Ei,tは構成されると仮定する。
観測誤差記憶部33は、例えば、観測誤差算出部32が時刻tの時に算出した各基地局20a、20b、20cの観測誤差Ei,tとして複数時刻分記憶する。このようにして、観測誤差記憶部33は、観測誤差算出部32により算出された各基地局の観測誤差を複数時刻分記憶する。
バイアス推定部34は、時刻tまでに観測誤差記憶部33に記憶されている複数時刻分の観測誤差Ei,tを基にバイアス量eb(i,t)を推定する。前述したように、観測誤差Ei,tは単峰性で山の中心が誤差0から正方向にずれ、正方向に裾を引くように非常に大きい値まで広く分布していると仮定すると、山の中心の誤差0からのずれをバイアス量eb(i,t)、山の幅をランダム的な誤差量er(i,t)、正方向に裾を引いている大きな値で分布している誤差を反射による誤差量en(i,t)と仮定することができる。
誤差量er(i,t)は、正規分布に従って発生すると考えられるため、複数時刻分の観測誤差Ei,tの平均値や中央値を取ることで除去できる。誤差量en(i,t)は、移動局10と各基地局20a、20b、20cの間がLOS環境である場合、発生する確率は極めて低いと考えられるため、非常に大きな値を異常値として誤差量en(i,t)を除去してもよいし、中央値を取ることにより除去することもできる。
一方、バイアス量eb(i,t)を推定するためには山のピークのずれを求めれば良いが、単純に平均値をとると非常に大きな値であるen(i,t)の影響を強く受けてしまう。
そこで、バイアス推定部34では、観測誤差記憶部33に記憶された観測誤差Ei,tの中央値をバイアス量eb(i,t)として推定する。移動局10が常に静止状態であり、基地局20a、20b、20cが同一のデバイスであった場合、バイアス量eb(i,t)は時刻や基地局に限らず一定であると考え、バイアス量ebとして扱う。
なお、観測誤差算出部32は、位置が既知である複数の基地局と、位置が未知である移動局との距離である複数の観測距離を複数算出する処理を、所定回数を上回るまで繰り返し、繰り返した結果得られた前記複数の観測距離の平均値又は中央値と、前記複数の基地局と前記移動局との距離である複数の観測距離に基づき算出された基準位置とに基づき複数の観測誤差を算出してもよい。バイアス推定部34は、算出された複数の観測誤差に基づき、該観測誤差分布上の単峰性の山のピークの観測誤差0からのずれであるバイアス量を推定してもよい。
観測距離補正部35は、距離計測部31により計測された各基地局20a、20b、20cの時刻tまでの観測距離ri,t’からバイアス推定部34が推定したバイアス量eb(i,t)の差分を取り、補正観測距離di,t(iは基地局数:1〜3、tは時刻:t>0)とする。バイアス推定部34が推定したバイアス量eb(i,t)が存在しない場合は、補正観測距離di,tは、距離計測部31により計測された観測距離ri,t’とする。
推定位置算出部36は、観測距離補正部35により決定された補正観測距離di,tを用いて、最小二乗法などで移動局10の位置を推定する。本実施形態では、3局の基地局20a、20b、20cの補正観測距離di,tを用いて最小二乗法により1局の移動局10の位置を算出し、推定位置として出力する。
なお、上記各部への指令は、専用の制御デバイスあるいはプログラムを実行する図示しないCPUにより実行される。図4に示した位置推定処理を実行するためのプログラムは、図示しないROMや不揮発性メモリに予め記憶されていて、CPUが、これらのメモリから各プログラムを読み出し実行することにより、距離計測部31、観測誤差算出部32、観測誤差記憶部33、バイアス推定部34、観測距離補正部35及び推定位置算出部36の各機能が実現される。
[位置検知装置の動作]
次に、本実施形態に係る位置検知装置30の動作について、図4に示した位置推定処理のフローチャートを参照しながら説明する。
次に、本実施形態に係る位置検知装置30の動作について、図4に示した位置推定処理のフローチャートを参照しながら説明する。
(観測距離の測定)
まず、距離計測部31は、時刻tまでの移動局と複数の基地局との観測距離ri,t’(iは基地局数:1〜3、tは時刻:t>0)を測定する(ステップS405)。
まず、距離計測部31は、時刻tまでの移動局と複数の基地局との観測距離ri,t’(iは基地局数:1〜3、tは時刻:t>0)を測定する(ステップS405)。
本実施形態では、距離計測部31は、図1に示したように、3台の基地局20a、20b、20cから移動局10までの距離をTOA(Time of Arrival)方式でリアルタイムに測定する。TOA方式では、移動局10と3台の基地局20a、20b、20cとの間で、無線信号の伝搬時間に基づいて測定する。
時刻t0に移動局10から送られた無線信号が、時刻t1に基地局20aに到達した場合を考える。この場合、移動局10から基地局20aまでの距離r1は、無線信号の伝達速度vを用いて以下の式で表すことができる。
移動局10から基地局20b、20cまでの距離r2、r3も同様に以下の式で表すことができる。
しかしながら、図3に示すように実際に観測される観測距離ri’(iは基地局数:1〜3)には移動局10と基地局20a、20b、20cの間の真の距離ri(iは基地局数:1〜3)に観測誤差Ei(iは基地局数:1〜3)が含まれて観測される。TOA方式の場合、観測誤差Eiは、サンプリング間隔やクロック精度によるランダム的な誤差量er,i(iは基地局数:1〜3)、アンテナと送受信時刻を付与する部分までの無線機器内の伝搬路によるバイアス的な誤差量(バイアス量)eb,i(iは基地局数:1〜3)、NLOS環境で多く見られる無線電波の伝搬路が反射によって伸びてしまうことによる非常に大きな誤差量en,i(iは基地局数:1〜3)によって構成されると考えられる。なお、基地局20a、20b、20cが同一のデバイスである場合、含まれるバイアス量は一定であると考えられるためeb,iをebとして扱う。
次に、観測誤差算出部32は、ステップS405にて測定された観測距離ri,t’とステップS410にて算出された距離ri,tとの差分を算出し、これを観測誤差Ei,tとする(ステップS415)。今、移動局10の位置座標を(px,py)とし、基地局20aの位置座標を(ax,1,ay,1)とした場合、基地局20aと移動局10の間の距離r1は以下の式で表すことができる。
移動局10から基地局20b、20c間の距離r2、r3についても同様に以下の式で表すことができる。
式(4)〜式(6)をpx,pyについてマトリックスに変換すると以下の式で表すことができる。
上式より最小二乗解は以下の式で表すことができる。
観測距離ri,t’の測定の繰り返し回数が所定回数を上回ったかを判断する(ステップS420)。上回っていない場合には、ステップS405に戻り、繰り返し回数が所定回数を上回るまでステップS405〜420の処理を繰り返し、上回った場合にS425に進む。
(バイアス量の推定)
観測誤差記憶部33は、観測誤差算出部32で算出した観測誤差Ei,tを複数時刻分記憶する。バイアス推定部34は、観測誤差記憶部33に蓄積された観測誤差Ei,tを用いてバイアス量ebを推定する。前述した観測誤差の分布の特性から観測誤差記憶部33に記録されている観測誤差の中から誤差erとenの影響を低減するために中央値を選択しバイアス量ebと推定する(ステップS425)。なお、非常に大きな値を異常値として誤差enを除去してから平均値を求めることによりバイアス量ebを推定してもよい。
観測誤差記憶部33は、観測誤差算出部32で算出した観測誤差Ei,tを複数時刻分記憶する。バイアス推定部34は、観測誤差記憶部33に蓄積された観測誤差Ei,tを用いてバイアス量ebを推定する。前述した観測誤差の分布の特性から観測誤差記憶部33に記録されている観測誤差の中から誤差erとenの影響を低減するために中央値を選択しバイアス量ebと推定する(ステップS425)。なお、非常に大きな値を異常値として誤差enを除去してから平均値を求めることによりバイアス量ebを推定してもよい。
(補正観測距離の算出)
観測距離補正部35は、距離計測部31により測定された移動局と各基地局間の観測距離ri,t’と、バイアス推定部34により推定されたバイアス量ebを用いて、補正観測距離di,tを算出する(ステップS430)。観測距離補正部35は、前記複数の観測距離とステップS425にて推定されたバイアス量との差分を補正後の複数の観測距離として算出する。補正観測距離di,tは、以下の式で表すことができる。
(移動局の位置推定)
推定位置算出部36は、観測距離補正部35により算出された補正観測距離di,tを用いて、以下の式により移動局10の位置(x,y)を推定する(ステップS430)。
推定位置算出部36は、観測距離補正部35により算出された補正観測距離di,tを用いて、以下の式により移動局10の位置(x,y)を推定する(ステップS430)。
移動局10の位置(x,y)の位置推定方法は、移動局10と各基地局20a、20b、20cとの距離を用いて移動局10の位置を推定する手法であれば何でもよい。
図5の観測誤差分布には、主に以下の(1)〜(3)の3つの観測誤差が含まれる。
(1)観測誤差分布上の単峰性の山のピークの観測誤差0からのずれであるバイアス量eb
(2)観測誤差分布上の裾野の広い部分の誤差量en
(3)観測誤差分布上の単峰性の山の幅方向の誤差量er
(1)観測誤差分布上の単峰性の山のピークの観測誤差0からのずれであるバイアス量eb
(2)観測誤差分布上の裾野の広い部分の誤差量en
(3)観測誤差分布上の単峰性の山の幅方向の誤差量er
移動局の位置を固定して複数回観測した観測距離の平均値や中央値を計算すれば、ランダム的な誤差である誤差量erや非常に大きい誤差である誤差量enの影響を低減した観測距離を得ることができる。また、移動局の位置を固定し、移動局と3局以上の基地局で観測した距離を用いて位置推定を複数回行った結果の平均値や中央値を算出すると、ランダム的な誤差や非常に大きい誤差の影響を低減した位置推定結果を得ることができる。
特に、ステップS420の判定処理にて、所定回数を上回るまで、新たな観測距離に基づき、前記観測誤差算出部による観測誤差の算出を繰り返すことにより(ステップS405〜S420)、観測誤差の中央値として求めたバイアス量に含まれる該観測誤差分布上の裾野の広い部分の誤差量en及び観測誤差分布上の単峰性の山の幅方向の誤差量erを低減して、バイアス量の推定精度を高めることができる。これにより、移動局の位置推定の精度も高めることができる。
また、本実施形態では、前記観測誤差算出部よる観測誤差の算出を繰り返さずに観測距離を所定の回数を上回るまで記憶し、記憶した全ての観測距離を用いて推定した位置を仮りの位置(基準位置)として、各基地局と移動局との観測距離から、各基地局と仮り位置との間の距離を減算したものをバイアス量と推定することができる。よって、以上説明したように、本発明の一実施形態に係る位置推定システム100によれば、実験により前もってバイアス量の正解値(初期値)を計測する必要がなく、複数の観測距離に基づきバイアス量を推定し、推定されたバイアス量により観測誤差の影響を低減し、精度良く移動局の位置を推定することができる。また、移動局が静止状態であるため、観測時間を長くすればするほど、高精度にバイアスを推定することができ、移動局の位置推定精度を高めることができる。
(応用例)
通常、移動局10は移動する。この場合、移動速度に比べサンプリングレートが十分に高ければ静止状態とみなしバイアス量を推定することができる。また、必ずしも観測距離が得られるたびにバイアス量を推定する必要はなく、観測距離が一定量得られたタイミングでバイアス量を推定することで計算量を低減することもできる。
通常、移動局10は移動する。この場合、移動速度に比べサンプリングレートが十分に高ければ静止状態とみなしバイアス量を推定することができる。また、必ずしも観測距離が得られるたびにバイアス量を推定する必要はなく、観測距離が一定量得られたタイミングでバイアス量を推定することで計算量を低減することもできる。
また、移動局10が複数存在することもある。この場合、移動局10は移動局間でユニークなIDを発信することにより、基地局20a、20b、20cはどの移動局10からの発信であるかを認識することができる。これにより、基地局20a、20b、20cは、移動局10毎にデータを収集することができる。
また、位置検知装置30の機能を複数の基地局20a、20b、20cのいずれかに内蔵してもよいし、位置検知装置30の機能を移動局10に内蔵し、自機の位置を推定するようにしてもよい。
通信方法は、電波に限られず、例えば赤外線や超音波、画像処理等を用いて基地局20a、20b、20cと移動局10間の観測距離を求めてもよい。
上記一実施形態において、各部の動作は互いに関連しており、互いの関連を考慮しながら、一連の動作として置き換えることができる。これにより、バイアス誤差推定装置の実施形態を、バイアス誤差方法の実施形態とすることができる。
以上、添付図面を参照しながら本発明の好適な実施形態について詳細に説明したが、本発明はかかる例に限定されない。本発明の属する技術の分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本発明の技術的範囲に属するものと了解される。
10 移動局
20a、20b、20c 基地局
30 位置検知装置
31 距離計測部
32 観測誤差算出部
33 観測誤差記憶部
34 バイアス推定部
35 観測距離補正部
36 推定位置算出部
100 位置推定システム
eb バイアス量
20a、20b、20c 基地局
30 位置検知装置
31 距離計測部
32 観測誤差算出部
33 観測誤差記憶部
34 バイアス推定部
35 観測距離補正部
36 推定位置算出部
100 位置推定システム
eb バイアス量
Claims (10)
- 位置が既知である複数の基地局と、位置が未知である移動局との距離である複数の観測距離に基づき基準位置を算出し、該基準位置から前記複数の基地局までの距離と前記複数の観測距離との差分を観測誤差として複数算出する処理を、所定回数を上回るまで繰り返す観測誤差算出部と、
前記観測誤差算出部による繰り返し処理の結果得られた複数の観測誤差に基づき、該観測誤差分布上の単峰性の山のピークの観測誤差0からのずれであるバイアス量を推定するバイアス推定部と、
を備えることを特徴とするバイアス誤差推定装置。 - 観測誤差は、前記バイアス量と、観測誤差分布上の裾野の広い部分の誤差量と、該観測誤差分布上の単峰性の山の幅方向の誤差量とから主に構成され、
前記観測誤差算出部による観測誤差の算出処理を、前記所定回数を上回るまで繰り返すことにより、前記推定されたバイアス量に含まれる前記該観測誤差分布上の裾野の広い部分の誤差量及び前記観測誤差分布上の単峰性の山の幅方向の誤差量を低減することを特徴とする請求項1に記載のバイアス誤差推定装置。 - 前記バイアス推定部は、前記観測誤差算出部により算出された複数の観測誤差の中央値を算出し、該中央値をバイアス量として推定することを特徴とする請求項1又は2のいずれか一項に記載のバイアス誤差推定装置。
- 前記複数の基地局と前記移動局との間を一方向又は双方向により取得した信号に基づき、前記複数の基地局と前記移動局との距離である前記複数の観測距離を測定する前記距離計測部を更に備えることを特徴とする請求項1〜3のいずれか一項に記載のバイアス誤差推定装置。
- 前記観測誤差算出部は、前記複数の観測距離に基づき、該複数の観測距離の一部または全てを用いて前記基準位置を算出することを特徴とする請求項1〜4のいずれか一項に記載のバイアス誤差推定装置。
- 前記観測誤差算出部により算出された各基地局の観測誤差を複数時刻分記憶する観測誤差記憶部を更に備え、
前記バイアス推定部は、前記観測誤差記憶部に記憶された複数時刻分の各基地局の観測誤差に基づき、前記バイアス量を推定することを特徴とする請求項1〜5のいずれか一項に記載のバイアス誤差推定装置。 - 位置が既知である複数の基地局と、位置が未知である移動局との距離である複数の観測距離に基づき基準位置を算出し、該基準位置から前記複数の基地局までの距離と前記複数の観測距離の差分を観測誤差として複数算出する処理を、所定回数を上回るまで繰り返す観測誤差算出ステップと、
前記観測誤差算出ステップによる繰り返し処理の結果得られた複数の観測誤差に基づき、該観測誤差分布上の単峰性の山のピークの観測誤差0からのずれであるバイアス量を推定するバイアス推定ステップと、
を含むことを特徴とするバイアス誤差推定方法。 - 位置が既知である複数の基地局と、位置が未知である移動局との距離である複数の観測距離に基づき基準位置を算出し、該基準位置から前記複数の基地局までの距離と前記複数の観測距離の差分を観測誤差として複数算出する処理を、所定回数を上回るまで繰り返す観測誤差算出部と、
前記観測誤差算出部による繰り返し処理の結果得られた複数の観測誤差に基づき、該観測誤差分布上の単峰性の山のピークの観測誤差0からのずれであるバイアス量を推定するバイアス推定部と、
前記バイアス推定部により推定されたバイアス量に基づき、前記複数の観測距離のそれぞれを補正する観測距離補正部と、
前記補正後の複数の観測距離に基づき、移動局の位置を推定する推定位置算出部と、
を備えることを特徴とする位置推定装置。 - 前記観測距離補正部は、前記複数の観測距離と前記推定されたバイアス量との差分を前記補正後の複数の観測距離として算出することを特徴とする請求項8に記載の位置推定装置。
- 位置が既知である複数の基地局と、位置が未知である移動局との距離である複数の観測距離を複数算出する処理を、所定回数を上回るまで繰り返し、繰り返した結果得られた前記複数の観測距離の平均値又は中央値と、前記複数の基地局と前記移動局との距離である複数の観測距離に基づき算出された基準位置とに基づき複数の観測誤差を算出する観測誤差算出部と、
前記算出された複数の観測誤差に基づき、該観測誤差分布上の単峰性の山のピークの観測誤差0からのずれであるバイアス量を推定するバイアス推定部と、
を備えることを特徴とするバイアス誤差推定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010227708A JP2012083136A (ja) | 2010-10-07 | 2010-10-07 | バイアス誤差推定装置、バイアス誤差推定方法及び位置推定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010227708A JP2012083136A (ja) | 2010-10-07 | 2010-10-07 | バイアス誤差推定装置、バイアス誤差推定方法及び位置推定装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012083136A true JP2012083136A (ja) | 2012-04-26 |
Family
ID=46242170
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010227708A Pending JP2012083136A (ja) | 2010-10-07 | 2010-10-07 | バイアス誤差推定装置、バイアス誤差推定方法及び位置推定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012083136A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014190980A (ja) * | 2013-03-27 | 2014-10-06 | Mitsubishi Electric R&D Centre Europe B.V. | ターゲットノードの位置を一群の協働ノードの中の少なくとも1つの協働ノードによって求める方法、デバイス、及びコンピュータプログラム |
| JP2017111004A (ja) * | 2015-12-16 | 2017-06-22 | 株式会社ダイヘン | 移動局、測位システム及びコンピュータプログラム |
| WO2017154779A1 (ja) * | 2016-03-09 | 2017-09-14 | 三菱電機株式会社 | 測位装置および測位方法 |
| JP2017207366A (ja) * | 2016-05-18 | 2017-11-24 | 千代田化工建設株式会社 | 監視対象物管理システム |
| JP2018040765A (ja) * | 2016-09-09 | 2018-03-15 | 株式会社ダイヘン | 測位システム及び移動局 |
| CN111033294A (zh) * | 2017-08-23 | 2020-04-17 | 洛希克斯有限公司 | 基于误差度量信息自适应地选择用于节点定位的距离估计的系统和方法 |
| WO2020110748A1 (ja) * | 2018-11-29 | 2020-06-04 | 株式会社オートネットワーク技術研究所 | 通信装置、通信システム |
| CN112526450A (zh) * | 2020-11-19 | 2021-03-19 | 西安电子科技大学 | 基于时钟偏差和站址误差的时差定位跟踪方法 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0996668A (ja) * | 1995-09-29 | 1997-04-08 | Matsushita Electric Ind Co Ltd | Gps受信装置 |
| JPH10508686A (ja) * | 1994-08-23 | 1998-08-25 | ハネウエル・インコーポレーテッド | 差分gps地上局システム |
| JP2002031675A (ja) * | 2000-07-17 | 2002-01-31 | Hitachi Ltd | 無線通信基地局、無線位置測定システム、送信タイミング測定装置ならびに位置測定センタ装置 |
| JP2002214320A (ja) * | 2001-08-09 | 2002-07-31 | Hitachi Ltd | 無線基地局の送信タイミングのオフセット測定方法及びオフセット測定装置 |
| JP2003501632A (ja) * | 1999-06-01 | 2003-01-14 | ケンブリッジ ポジショニング システムズ リミテッド | 無線測位システムの改良 |
| JP2004251714A (ja) * | 2003-02-19 | 2004-09-09 | Mitsubishi Electric Corp | 測位装置 |
| JP2005024535A (ja) * | 2003-06-12 | 2005-01-27 | Mitsubishi Electric Corp | 位置推定装置 |
| JP2006090913A (ja) * | 2004-09-27 | 2006-04-06 | Hitachi Ltd | 位置算出方法およびそのプログラム |
| JP2010512064A (ja) * | 2006-12-01 | 2010-04-15 | トゥルーポジション・インコーポレーテッド | ワイヤレス・デバイスの位置検出をし易くするためにセル送信機パラメータを自動的に決定するシステム |
-
2010
- 2010-10-07 JP JP2010227708A patent/JP2012083136A/ja active Pending
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10508686A (ja) * | 1994-08-23 | 1998-08-25 | ハネウエル・インコーポレーテッド | 差分gps地上局システム |
| JPH0996668A (ja) * | 1995-09-29 | 1997-04-08 | Matsushita Electric Ind Co Ltd | Gps受信装置 |
| JP2003501632A (ja) * | 1999-06-01 | 2003-01-14 | ケンブリッジ ポジショニング システムズ リミテッド | 無線測位システムの改良 |
| JP2003501633A (ja) * | 1999-06-01 | 2003-01-14 | ケンブリッジ ポジショニング システムズ リミテッド | 無線測位システムの改良 |
| JP2002031675A (ja) * | 2000-07-17 | 2002-01-31 | Hitachi Ltd | 無線通信基地局、無線位置測定システム、送信タイミング測定装置ならびに位置測定センタ装置 |
| JP2002214320A (ja) * | 2001-08-09 | 2002-07-31 | Hitachi Ltd | 無線基地局の送信タイミングのオフセット測定方法及びオフセット測定装置 |
| JP2004251714A (ja) * | 2003-02-19 | 2004-09-09 | Mitsubishi Electric Corp | 測位装置 |
| JP2005024535A (ja) * | 2003-06-12 | 2005-01-27 | Mitsubishi Electric Corp | 位置推定装置 |
| JP2006090913A (ja) * | 2004-09-27 | 2006-04-06 | Hitachi Ltd | 位置算出方法およびそのプログラム |
| JP2010512064A (ja) * | 2006-12-01 | 2010-04-15 | トゥルーポジション・インコーポレーテッド | ワイヤレス・デバイスの位置検出をし易くするためにセル送信機パラメータを自動的に決定するシステム |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014190980A (ja) * | 2013-03-27 | 2014-10-06 | Mitsubishi Electric R&D Centre Europe B.V. | ターゲットノードの位置を一群の協働ノードの中の少なくとも1つの協働ノードによって求める方法、デバイス、及びコンピュータプログラム |
| JP2017111004A (ja) * | 2015-12-16 | 2017-06-22 | 株式会社ダイヘン | 移動局、測位システム及びコンピュータプログラム |
| WO2017154779A1 (ja) * | 2016-03-09 | 2017-09-14 | 三菱電機株式会社 | 測位装置および測位方法 |
| JPWO2017154779A1 (ja) * | 2016-03-09 | 2018-05-24 | 三菱電機株式会社 | 測位装置および測位方法 |
| JP2017207366A (ja) * | 2016-05-18 | 2017-11-24 | 千代田化工建設株式会社 | 監視対象物管理システム |
| JP2018040765A (ja) * | 2016-09-09 | 2018-03-15 | 株式会社ダイヘン | 測位システム及び移動局 |
| CN111033294A (zh) * | 2017-08-23 | 2020-04-17 | 洛希克斯有限公司 | 基于误差度量信息自适应地选择用于节点定位的距离估计的系统和方法 |
| WO2020110748A1 (ja) * | 2018-11-29 | 2020-06-04 | 株式会社オートネットワーク技術研究所 | 通信装置、通信システム |
| CN112526450A (zh) * | 2020-11-19 | 2021-03-19 | 西安电子科技大学 | 基于时钟偏差和站址误差的时差定位跟踪方法 |
| CN112526450B (zh) * | 2020-11-19 | 2022-10-21 | 西安电子科技大学 | 基于时钟偏差和站址误差的时差定位跟踪方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11051267B2 (en) | Channel latency determining method, positioning method, and related device | |
| JP2012083136A (ja) | バイアス誤差推定装置、バイアス誤差推定方法及び位置推定装置 | |
| US8179251B2 (en) | Method and network for determining positions of wireless nodes while minimizing propagation of positioning errors | |
| KR101040705B1 (ko) | 무선 측위 시스템 및 측위 방법 | |
| KR101234177B1 (ko) | 사용자 단말의 위치 측정 방법 | |
| CN107113762B (zh) | 一种定位方法、定位服务器及定位系统 | |
| CN110167135B (zh) | 一种免时钟同步的tdoa无线定位方法及系统 | |
| JP4957770B2 (ja) | 位置推定システム、位置推定装置、位置推定方法及びプログラム | |
| JP2011214920A (ja) | 位置推定装置、位置推定方法及びプログラム | |
| JP5278365B2 (ja) | 位置推定装置及び位置推定方法 | |
| CN110636606A (zh) | 用于确定节点位置的方法和系统 | |
| Baba | Calibrating time of flight in two way ranging | |
| US10349214B2 (en) | Localization using access point | |
| US20180329023A1 (en) | System and method for wireless time-of-arrival localization | |
| US11265841B2 (en) | Position estimation method and position estimation apparatus | |
| KR100882590B1 (ko) | 위치 판단 장치 및 방법 | |
| US10219103B2 (en) | Power-efficient location estimation | |
| CN103592624A (zh) | 一种基于接收信号强度的测距方法 | |
| Srbinovska et al. | Localization techniques in wireless sensor networks using measurement of received signal strength indicator | |
| JP6607190B2 (ja) | 位置推定装置、位置推定システム、方法および記録媒体 | |
| JP6185804B2 (ja) | 判定装置、ネットワークノード、判定方法、及びプログラム | |
| US20170013402A1 (en) | Localization using access point | |
| Zhang et al. | A distributed self-localization algorithm for wireless sensor networks | |
| CN116210291A (zh) | 用于无线设备定位的方法和系统 | |
| KR101049512B1 (ko) | 기준 디바이스의 위치 오차를 포함하는 무선 환경에서의 최대우도함수 기반 위치 추정 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120905 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120918 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121019 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130625 |