CN110337886B - 一种履带自走式大葱联合收获机 - Google Patents
一种履带自走式大葱联合收获机 Download PDFInfo
- Publication number
- CN110337886B CN110337886B CN201910702720.5A CN201910702720A CN110337886B CN 110337886 B CN110337886 B CN 110337886B CN 201910702720 A CN201910702720 A CN 201910702720A CN 110337886 B CN110337886 B CN 110337886B
- Authority
- CN
- China
- Prior art keywords
- clamping
- conveying
- shovel
- belt
- onion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D31/00—Other digging harvesters
- A01D31/02—Other digging harvesters combined with other agricultural machines, e.g. drilling, planting, hay-harvesting machines
Abstract
本发明公开了一种履带自走式大葱联合收获机,包括机架总成,机架总成上设有限深清土机构、振动挖掘机构、夹持输送机构、收集平台总成;限深清土机构通过连杆与夹持输送机构固接,夹持输送机构倾斜向上设置,夹持输送机构的低端与振动挖掘机构固接,收集平台总成配合设置于夹持输送机构的高端;限深清土机构包括两个对称铰接于机架总成两侧的限深松土部件,限深松土部件包括水平设置的限深臂,限深臂端部与倾斜设置的限深轮连接,限深臂中部通过第一传动机构与松土刀部件连接;振动挖掘机构包括铲架,铲架一端通过偏心轴与连接座连接,铲架另一端设置挖掘铲,偏心轴由第二传动机构传递动力转动。
Description
技术领域
本公开涉及大葱收获农业机械技术领域,具体涉及一种履带自走式大葱联合收获机。
背景技术
根茎类作物是我国重要的经济作物类别之一,近年来,随着我国根茎类作物的种植面积不断扩大,根茎类作物的产量逐年增加且种类也越加丰富。根茎类作物相比于地上作物而言,生长环境复杂、收获难度大。目前,土豆、花生、地瓜、胡萝卜等大面积种植作物的收获技术日趋成熟,但是,像葱、姜、蒜等特色经济作物的收获技术还处于起步阶段,且作物极具特色,收获难度更大。以大葱为例,特别是章丘大葱,种植深度比较深,挖掘铲作业时前进阻力特别大,可是在收获期,大马力通用动力设备难以进地;大葱葱白特别脆,怕损伤,现有挖掘收获技术容易造成大葱的损伤,不适宜大葱的收获作业。研究表明,振动挖掘能降低前进阻力40%~50%,振动式挖掘的方式降低了对收获装备前进驱动力的要求。
大葱是山东省优势特色经济作物之一,种植面积和产量均居全国首位,其中章丘大葱是享誉世界的地理标志性产品。章丘大葱的特点是高、粗、脆,种植深度比较深,难以实现章丘大葱的机械化收获。
现有的大葱收获机没有有效的减阻方案,功率消耗大,收获深度不足,难以满足章丘大葱的收获;夹持输送过程中容易造成大葱的损伤或折断,大葱带土比较严重。
发明内容
本公开目的是为克服上述现有技术的不足,提供一种履带自走式大葱联合收获机;该收获机可以一次性完成大葱的限深松土、振动挖掘、土壤松碎、柔性夹持输送、换向输送和收集等作业,能有效减小挖掘作业阻力,实现对包裹土壤的有效松动,减轻夹持输送过程中对大葱的损伤,收获的大葱品质较高,减轻大葱收获作业劳动强度。
本公开的发明目的是提出一种履带自走式大葱联合收获机,为实现上述目的,本公开采用下述技术方案:
一种履带自走式大葱联合收获机,包括机架总成,机架总成上设有限深清土机构、振动挖掘机构、夹持输送机构、收集平台总成;
所述限深清土机构通过连杆与夹持输送机构固接,夹持输送机构倾斜向上设置,夹持输送机构的低端与振动挖掘机构固接,收集平台总成配合设置于夹持输送机构的高端;
所述限深清土机构包括两个对称铰接于机架总成两侧的限深松土部件,所述限深松土部件包括水平设置的限深臂,限深臂端部与倾斜设置的限深轮连接,所述限深臂中部通过第一传动机构与松土刀部件连接;
所述振动挖掘机构包括铲架,所述铲架一端通过偏心轴与连接座连接,铲架另一端设置挖掘铲,连接座与机架总成固接,所述偏心轴由第二传动机构传递动力转动,所述铲架靠近挖掘铲的侧部设置长槽,长槽内配合设置可沿长槽滑动的滑套,滑套与夹持输送机构固接,由铲架围绕偏心轴的振动与相对滑套的滑动,使挖掘铲作横向长椭圆形振动,实现振动挖掘。
作为进一步的技术方案,所述限深臂还通过伸缩部件与机架总成固定连接。
作为进一步的技术方案,所述限深轮与竖直平面有设定夹角。
作为进一步的技术方案,所述铲架在竖直方向倾斜设置,铲架上表面具有凹槽。
作为进一步的技术方案,所述长槽水平设置。
作为进一步的技术方案,所述挖掘铲在竖直方向倾斜设置,所述挖掘铲包括铲脊,所述铲脊两侧均与铲刃固接,铲刃侧部与连接板固接,连接板与铲架固定连接。
作为进一步的技术方案,所述铲刃通过多根导向杆与夹持输送机构连接。
作为进一步的技术方案,所述铲脊包括相连接的两倾斜板,倾斜板由与另一倾斜板的连接处向铲刃方向倾斜向下设置,两倾斜板的倾斜角度相同。
作为进一步的技术方案,所述倾斜板与铲刃、连接板之间形成通道,且通道面积由低端向高端逐渐减小。
作为进一步的技术方案,所述铲刃包括相连接的第一连接板和第二连接板,两连接板倾斜向上设置,且第二连接板位于第一连接板上部,第二连接板的倾斜角度大于第一连接板的倾斜角度。
作为进一步的技术方案,所述连接板与铲刃相互垂直设置。
作为进一步的技术方案,所述收集平台总成包括倾斜设置的导向板,导向板与水平设置的操作平台连接,操作平台与可折叠的延展平台连接,所述操作平台底部通过平台支架固定于机架总成。
作为进一步的技术方案,所述导向板由夹持输送机构向操作平台倾斜向下设置。
作为进一步的技术方案,所述导向板侧部通过可伸缩支撑杆与平台支架连接;所述延展平台侧部通过另一可伸缩支撑杆与平台支架连接。
作为进一步的技术方案,所述夹持输送机构包括底部输送装置,底部输送装置上方配合设置一级夹持输送装置,底部输送装置与一级夹持输送装置固接且二者同步输送,一级夹持输送装置可带动大葱折向输送以松动葱垄土壤;
所述一级夹持输送装置末端上方配合设置二级夹持输送装置,二级夹持输送装置末端下方配合设置导葱装置,二级夹持输送装置可输送大葱至导葱装置处,导葱装置可夹持住大葱根部并将其由竖直放平并输送至收集平台总成。
作为进一步的技术方案,所述底部输送装置、一级夹持输送装置、二级夹持输送装置均倾斜向上设置,所述底部输送装置固定设置于铲架内,且底部输送装置与挖掘铲连接。
作为进一步的技术方案,所述导葱装置包括相对配合设置的第一导葱带和第二导葱带,所述第一导葱带和第二导葱带沿输送方向均由二级夹持输送装置的倾斜方向扭转至竖直向。
作为进一步的技术方案,所述第一导葱带环绕在第一驱动带轮和第一被动带轮上,所述第一驱动带轮和第一被动带轮的轮面相互垂直。
作为进一步的技术方案,所述第二导葱带环绕在第二驱动带轮和第二被动带轮上,所述第二驱动带轮和第二被动带轮的轮面相互垂直。
作为进一步的技术方案,所述导葱装置还包括扶葱带,所述扶葱带环绕在扶葱带驱动轮和扶葱带被动轮上,所述扶葱带由第二导葱带中部上方向第二导葱带末端倾斜设置。
作为进一步的技术方案,所述扶葱带带面上设置尖刺状结构。
作为进一步的技术方案,所述一级夹持输送装置包括相对配合设置的第一夹持带组和第二夹持带组,所述第二夹持带组与第一夹持带组结构相同,且第二夹持带组和第一夹持带组之间形成折线形输送通道。
作为进一步的技术方案,所述第一夹持带组包括第一夹持带,第一夹持带由两带轮支撑且两带轮之间靠近第二夹持带组侧设置张紧轮组,所述第一夹持带末端带轮环绕设置第二夹持带。
作为进一步的技术方案,所述二级夹持输送装置包括相对配合设置的第一夹持输送组件和第二夹持输送组件,第一夹持输送组件和第二夹持输送组件结构相同且二者沿二者之间接触面相对称设置。
作为进一步的技术方案,所述第一夹持输送组件包括二级夹持带,二级夹持带环绕设置在二级驱动带轮和二级张紧轮上,所述二级驱动带轮和二级张紧轮之间设置支撑杆,支撑杆沿二级夹持带的运转方向设置多个夹持张紧装置,夹持张紧装置端部支撑张紧二级夹持带。
作为进一步的技术方案,所述夹持张紧装置包括弯折杆,弯折杆的弯折处铰接于支撑杆,弯折杆一端与支撑杆之间连接弹性元件,弯折杆另一端固设支撑轮。
作为进一步的技术方案,所述二级夹持带的带面上设置软质夹持层。
本公开的有益效果为:
本公开的大葱联合收获机,可以一次性完成大葱的限深松土、振动挖掘、土壤松碎、柔性夹持输送、换向输送和收集等作业。
本公开的大葱联合收获机,通过控制限深松土机构,可以实现夹持输送机构的升降,进而控制振动挖掘机构的升降。可以实现限制挖掘深度和行走导向的作用。
本公开的大葱联合收获机,挖掘输送机构可实现大葱振动挖掘,有效降低大葱挖掘作业前进阻力。
本公开的大葱联合收获机,夹持输送机构采用底部输送装置和一级夹持输送装置、二级夹持输送装置和导葱装置三级夹持输送机构,能够有效的去土,将大葱由竖直输送转为横向水平摆放,实现大葱的无损夹持输送。
本公开的大葱联合收获机,集葱装置可将夹持输送装置输送过来的大葱进行归集,然后在操作平台上人工作业,延展平台采用可折叠结构,在工作时扩大作业平台面积。
附图说明
构成本申请的一部分的说明书附图用来提供对本申请的进一步理解,本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定。
图1为履带自走式大葱联合收获机的整体结构示意图;
图2为限深清土机构的结构示意图;
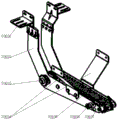
图3为振动挖掘机构的结构示意图;
图4为挖掘铲的结构示意图;
图5为夹持输送机构的结构示意图;
图6为底部输送装置的结构示意图;
图7为一级夹持输送装置结构示意图;
图8为二级夹持输送装置的主视图;
图9为二级夹持输送装置的俯视图;
图10为导葱装置的结构示意图;
图11为机架总成的结构示意图;
图12为驱动总成的结构示意图;
图13为行走总成的结构示意图;
图14为收集平台总成的结构示意图;
图中,1.限深清土机构,11.右限深松土装配,1101.连杆,1102.限深臂,1103驱动链轮,1104.传动链条,1105.松土刀部件,1106.限深轮,12.左限深松土装配;
2.振动挖掘机构,201.挖掘铲,20101.铲刃;20102.铲脊;20103.导向杆;20104.连接板;202.铲架,203.偏心轴,204.振动驱动链轮,205.连接座,206.长槽;
3.夹持输送机构,301.导葱装置,30101.左导葱带,30102.扶葱带,30103.扶葱带驱动轮,30104.联轴器,30105.右导葱带驱动带轮,30106.导葱装置机架,30107.右导葱带,30108.导葱带驱动马达,30109尖刺状结构,302.后连杆,303.底部输送驱动马达,304.前连杆,305.底部输送驱动链条,306.底部输送装置,30601.后连接件,30602.机架,30603.底部输送驱动链轮,30604.前连接件,30605.输送链,30606.滑套,30607.张紧装置,307.一级夹持输送装置,30701.一级夹持左支架,30702.夹持输送驱动链轮,30703.夹持输送驱动马达,30704.一级驱动链轮,30705.左夹持带Ⅱ,30706.张紧轮,30707.支撑轮,30708.左夹持带Ⅰ,30709.张紧轮组,30710.右夹持带,30711.一级夹持右支架,308.二级夹持输送装置,3080.二级右夹持,30801.二级驱动带轮,30802.二级夹持带,30803.夹持张紧装置,30804.二级右夹持支架,30805.二级左夹持支架,30806.张紧螺栓,30807.二级张紧轮,30808.二级夹持输送驱动链轮,30809支撑杆,30810弯折杆,30811弹簧,30812支撑轮,3081.二级左夹持;
4.车架总成;
5.驱动总成,501.发动机总成,502.齿轮泵;
6.行走总成,601.左履带装配,60101.导向轮,60102.支重轮,60103.履带导轨板,60104.驱动轮,60105.履带,602驱动变速箱,603右履带装配;
7.收集平台总成,701.导向板,702.支撑杆,703.平台支架,704.操作平台,705.延展平台。
具体实施方式
应该指出,以下详细说明都是例示性的,旨在对本申请提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本申请所属技术领域的普通技术人员通常理解的相同含义。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合;
为了方便叙述,本公开中如果出现“上”、“下”、“左”“右”字样,仅表示与附图本身的上、下、左、右方向一致,并不对结构起限定作用,仅仅是为了便于描述本公开和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本公开的限制。
正如背景技术所介绍的,发明人发现,现有的大葱收获机没有有效的减阻方案,功率消耗大,收获深度不足,难以满足章丘大葱的收获;夹持输送过程中容易造成大葱的损伤或折断,大葱带土比较严重;为了解决如上的技术问题,本申请提出了一种履带自走式大葱联合收获机。
本申请提供了一种履带自走式大葱联合收获机,包括机架总成,机架总成上设有限深清土机构、振动挖掘机构、夹持输送机构、收集平台总成;
所述限深清土机构通过连杆与夹持输送机构固接,夹持输送机构倾斜向上设置,夹持输送机构的低端与振动挖掘机构固接,收集平台总成配合设置于夹持输送机构的高端;
所述限深清土机构包括两个对称铰接于机架总成两侧的限深松土部件,所述限深松土部件包括水平设置的限深臂,限深臂端部与倾斜设置的限深轮连接,所述限深臂中部通过第一传动机构与松土刀部件连接;
所述振动挖掘机构包括铲架,所述铲架一端通过偏心轴与连接座连接,铲架另一端设置挖掘铲,连接座与机架总成固接,所述偏心轴由第二传动机构传递动力转动,所述铲架靠近挖掘铲的侧部设置长槽,长槽内配合设置可沿长槽滑动的滑套,滑套与夹持输送机构固接,由铲架围绕偏心轴的振动与相对滑套的滑动,使挖掘铲作横向长椭圆形振动,实现振动挖掘。
实施例1
下面结合附图1-附图13对本实施例公开的大葱收获机做进一步的说明;
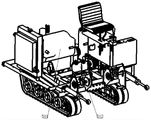
参照附图1所示,履带自走式大葱联合收获机,主要包括车架总成4、行走总成6、驱动总成5、限深清土机构1、振动挖掘机构2、夹持输送机构3和收集平台总成7等。振动挖掘机构2、夹持输送机构3均倾斜向上设置,夹持输送机构3的低端与振动挖掘机构2固接,收集平台总成7配合设置于夹持输送机构3的高端。限深清土机构1安装在车架总成4最前端,通过连杆连接夹持输送机构3,振动挖掘机构2固定在收获机前端,上部通过螺栓与夹持输送机构3固定连接。
行走总成和驱动总成安装在车架总成后部,实现收获机行走功能并为作业部件工作运转提供动力;限深清土机构铰接安装在机架总成前部,对葱垄两侧土壤初步清理;振动挖掘机构固定于机架总成前部,完成大葱的振动挖掘;夹持输送机构通过前连杆和后连杆与主机相连,完成大葱的三级输送;收集平台总成固定于机架总成后部,完成大葱的收集任务。
参照附图13所示,行走总成6主要包括左履带装配601、驱动变速箱602和右履带装配603等,它采用后置驱动的方式。驱动变速箱602选用液压无极变速(HST)驱动方式,可实现三挡调整、正向、倒行无极变速行走方式,操作方便灵活,驱动力强。左履带装配601主要包括导向轮60101、支重轮60102、履带导轨板60103、驱动轮60104和履带60105等,满足收获机驱动力的需要。右履带装配603和左履带装配601采用相同结构组成。
参照附图12所示,驱动总成5设置于车架总成4中后部,主要包括发动机总成501、齿轮泵502等,分两路分别驱动行走总成和作业部件。一路,发动机总成通过V带驱动液压无级变速器(HST),进而驱动行走总成;另一路,通过V带驱动液压系统齿轮泵,由液压马达、油缸等驱动作业部件,动力匹配合理。
参照附图2所示,限深清土机构1主要包括左限深松土装配12和右限深松土装配11,左右两侧结构原理相似,对称安装。
限深清土机构1铰接安装在机架总成4上,上部通过油缸与机架总成4连接,通过操作油缸,可以实现限深清土机构1的升降;
限深清土机构1前端通过连杆1101与夹持输送机构3连接,通过提升限深清土机构1实现夹持输送机构3的提升。工作时,限深清土机构1首先将葱垄两侧土壤进行初步清理,同时支撑轮可以起到限制挖掘深度和行走导向的作用。
参照附图2所示,右限深松土装配11主要包括连杆1101、限深臂1102、驱动链轮1103、传动链条1104、松土刀部件1105和限深轮1106等。限深臂1102水平设置,限深臂1102端部与限深轮1106连接,限深轮1106采用倾斜布置,工作时限深轮1106支撑在葱垄和葱沟底部夹角部位,既能实现较好的支撑限深作用,又能实现一定的导向作用。
限深臂1102中部固设驱动链轮1103,驱动链轮1103通过传动链条1104与从动链轮连接,从动链轮与松土刀部件1105连接,带动松土刀部件1105转动。传动链条1104可设置于箱体类结构中。
松土刀部件1105从葱垄两侧将葱垄包裹土壤进行旋耕清理,以减小振动挖掘阻力。限深轮1106和松土刀部件1105可以实现横向的调整,以适应不同的垄宽。
参照附图3所示,振动挖掘机构2,主要包括挖掘铲201、铲架202、偏心轴203、振动驱动链轮204和连接座205。
连接座205由螺栓固定在车架总成4上;偏心轴203通过轴承固定在连接座205上;铲架202通过轴承固定在偏心轴203上;振动驱动链轮204固定在偏心轴203轴端。主机动力通过链条驱动振动驱动链轮204,进而驱动偏心轴203,使铲架202上部围绕偏心轴203作偏心振动;铲架202下端设置挖掘铲201,铲架202靠近挖掘铲201的侧部设置有长槽206,长槽206与滑套30606配合,二者可相对滑动,滑套30606固定于夹持输送机构3的底部输送装置306上;铲架202上部围绕偏心轴203的振动与相对滑套滑动运动合成,使挖掘铲201作横向长椭圆形振动,实现振动挖掘;工作结束后,通过提升夹持输送机构,滑套通过铲架长槽将振动挖掘机构提起,方便设备转场作业和运输。
铲架202在竖直方向倾斜设置,铲架202上表面具有凹槽,夹持输送机构3的底部输送装置306设置于该凹槽内。
参照附图4所示,挖掘铲201主要包括铲刃20101、铲脊20102、导杆20103和连接板20104。挖掘铲201在竖直方向倾斜设置,连接板20104位于挖掘铲201两侧,将挖掘铲201固定在铲架202前端;
铲脊20102两侧均与铲刃20101固接,铲刃20101侧部与连接板20104固接。铲刃20101通过多根导向杆20103与夹持输送机构3连接。
铲脊20102包括相连接的两倾斜板,倾斜板由与另一倾斜板的连接处向铲刃20101方向倾斜向下设置,两倾斜板的倾斜角度相同。铲脊20102布置在挖掘铲201正中,作业时处于葱垄底部中间位置,可以将葱垄从中间顶起,借助于葱垄重力,实现大葱包裹土壤的变形松散;
铲脊20102倾斜板与铲刃20101、连接板20104之间形成通道,且通道面积由低端向高端逐渐减小。连接板20104与铲刃20101相互垂直设置。
铲刃20101包括相连接的第一连接板和第二连接板,两连接板倾斜向上设置,且第二连接板位于第一连接板上部,第二连接板的倾斜角度大于第一连接板的倾斜角度。铲刃20101采用折弯结构,入土端可以使铲刃20101以较小的入土角入土,减小入土阻力,后端可以有较大的输送抬升角度。
导向杆20103采用三个圆柱形结构,既能有效支撑葱垄大葱部位,有利于大葱包裹土壤的脱落,同时减小葱垄滑动输送阻力,并与底部输送装置306的输送链30605进行衔接。
振动挖掘机构在工作过程中,挖掘铲可以有效降低根茎类作物前进阻力;振动轴驱动的结构可以解决现有振动机构牵引机构结构强度不足的问题,可抬升的结构特点可满足设备转场或运输的需求;振动挖掘输送衔接作业能有效地减少作业前进阻力、提高作业效率,同时,实现大葱的无损收获。
参照附图5所示,夹持输送机构3主要包括底部输送装置306、一级夹持输送装置307、二级夹持输送装置308和导葱装置301;夹持输送机构3通过前连杆304和后连杆302与主机相连。底部输送装置306深入到振动挖掘机构2的铲架202内部,与挖掘铲201衔接,将挖掘铲201挖起的大葱和包裹土壤整体从底部向上输送,底部输送装置306通过后连接件30601和前连接件30604分别与一级夹持输送装置307、二级夹持输送装置308固定连接。一级夹持输送装置307安装在底部输送装置306上方,与底部输送同步,夹持葱垄土壤包裹部位,将大葱同步向上输送;同时,在夹持输送过程中,实现葱垄的成一定角度的折向输送,达到松动葱垄土壤的目的。二级夹持输送装置308固定在一级夹持输送装置307的尾部上方,与一级夹持输送装置307衔接,夹持住大葱的分叶处,将大葱向上夹持输送;同时,底部输送装置306输送结束,使土壤自然脱落,达到去土的目的。导葱装置301固定在二级夹持输送装置308尾部下方,与二级夹持输送装置308衔接,夹持住大葱根部,将大葱由竖直缓慢放平,输送至收集平台总成7。
底部输送装置306、一级夹持输送装置307、二级夹持输送装置308均倾斜向上设置。
参照附图6所示,底部输送装置306主要包括后连接件30601、机架30602、底部输送驱动链轮30603、前连接件30604、输送链30605、滑套30606和张紧装置30607等。底部输送装置306布置在振动挖掘机构2的铲架202内部。动力由底部输送驱动马达303通过底部输送驱动链条305驱动底部输送驱动链轮30603提供。
后连接件30601和前连接件30604将机架30602与一级夹持输送装置307、二级夹持输送装置308固定连接,通过调整后连接件30601和前连接件30604可实现一级夹持输送装置307夹持带间距的调整;输送链30605安装在机架30602内部,张紧装置30607将输送链30605张紧并与挖掘铲201衔接,实现从葱垄根部对大葱的向上输送,输送链30605采用长节距自制链条,在输送过程方便大葱包裹土壤的脱落;滑套30606与挖掘铲201连接,滑套13可围绕挖掘铲铰接圆心作圆周运动,通过调整夹持输送机构3,实现对挖掘铲201高度的调整。
参照附图7所示,一级夹持输送装置307主要包括一级夹持左支架30701、夹持输送驱动链轮30702、夹持输送驱动马达30703、一级驱动链轮30704、左夹持带Ⅱ30705、张紧轮30706、支撑轮30707、左夹持带Ⅰ30708、张紧轮组30709、右夹持带30710和一级夹持右支架30711等。一级夹持输送装置307分别与底部输送装置306和二级夹持输送装置308固定连接。前连杆304分别与一级夹持右支架30711和一级夹持左支架30701连接。
夹持输送驱动链轮30702安装在夹持输送驱动马达30703上,左右两侧各有一组,下层链轮通过链条驱动一级驱动链轮30704,进而驱动一级夹持输送装置307左侧的左夹持带Ⅰ30708、左夹持带Ⅱ30705和右侧的右夹持带30710;上层链轮左右两侧分别驱动二级夹持输送装置308的二级夹持输送驱动链轮30808。
张紧轮30706、左夹持带Ⅰ30708、支撑轮30707和左夹持带Ⅱ30705组成一级夹持输送装置307左侧具有内折角度的夹持输送带,即第一夹持带组;其左夹持带Ⅰ30708、左夹持带Ⅱ30705的带面具有一定夹角;张紧轮组30709和右夹持带30710组成右侧的与第一夹持带组平行的具有外折角度的夹持输送带,即第二夹持带组;第一夹持带组和第二夹持带组之间形成折线形输送通道;左、右两侧夹持输送带组成的一级输送带组夹持住收获机旋耕刀修整后的葱垄包裹土壤部位,实现葱垄的一级输送;同时,在输送过程中对葱垄进行折向运输,实现松动土壤的目的。
参照附图8和9所示,二级夹持输送装置308主要包括二级右夹持3080、二级左夹持3081;动力分别由一级夹持输送装置307中夹持输送驱动链轮30702上侧通过链条驱动二级夹持输送驱动链轮30808提供。
二级右夹持3080(即第一夹持输送组件)、二级左夹持3081(即第二夹持输送组件)结构相似,二者沿二者之间接触面相对称设置,主要包括二级夹持输送驱动链轮30808、二级驱动带轮30801、二级夹持带30802、夹持张紧装置30803、张紧螺栓30806和二级张紧轮30807等。二级夹持带30802采用双层结构,外层为软质夹持层,采用软质海绵,内层为驱动层,采用硬质平带,既有较好的夹持力,又保证不夹伤大葱。二级夹持带30802环绕设置在二级驱动带轮30801和二级张紧轮30807上,二级驱动带轮30801与二级夹持输送驱动链轮30808连接,张紧螺栓30806、二级张紧轮30807可以对二级夹持带30802进行张紧。
二级驱动带轮30801和二级张紧轮30807之间设置支撑杆30809,支撑杆30809沿二级夹持带的运转方向设置多个夹持张紧装置30803,夹持张紧装置30803端部支撑张紧二级夹持带30802。夹持张紧装置30803连续均匀布置,采用弹簧张紧,使大葱在夹持输送过程中保持稳定的夹持力;同时对不同粗细的葱都有较好的夹持效果。夹持张紧装置30803均支撑于二级右夹持3080、二级左夹持3081接触面侧的二级夹持带30802。
夹持张紧装置包括弯折杆30810,弯折杆30810的弯折处铰接于支撑杆30809,弯折杆30810一端与支撑杆30809之间连接弹簧30811,弯折杆30810另一端固设支撑轮30812,支撑轮30812支撑二级左夹持30802带面。
对应于二级夹持输送装置308输送入口端、输送出口端的弯折杆30810的弯折角度为钝角,其余中部设置的弯折杆30810大约呈90度弯折,使二级夹持带30802的输送带面成一平面,二级张紧轮30807的直径小于二级驱动带轮30801的直径,二级夹持输送装置308输送入口端两二级夹持带30802间距离较大,且成一夹角,二级夹持输送装置308输送出口端两二级夹持带30802间距离较小,也成一夹角。
参照附图10所示,导葱装置301主要包括左导葱带30101、扶葱带30102、扶葱带驱动轮30103、联轴器30104、右导葱带驱动带轮30105、导葱装置机架30106、右导葱带30107和导葱带驱动马达30108、尖刺状结构30109等,它固定在二级夹持输送装置308尾部下方。
左导葱带30101(即第一导葱带)和右导葱带30107(即第二导葱带)相对配合设置的,左导葱带30101和右导葱带30107沿输送方向均由二级夹持输送装置的倾斜方向扭转至竖直向。
右导葱带30107环绕在右导葱带驱动带轮30105和右被动带轮上,右导葱带驱动带轮30105和右被动带轮的轮面相互垂直。左导葱带30101环绕在左导葱带驱动带轮和左被动带轮上,左导葱带驱动带轮和左被动带轮的轮面相互垂直。使得左导葱带30101、右导葱带30107发生扭转,大葱经由二者夹持输送由竖直逐渐放平。
扶葱带30102环绕在扶葱带驱动轮30103和扶葱带被动轮上,扶葱带30102由右导葱带30107中部上方向右导葱带30107末端倾斜设置,扶葱带30102带面上设置尖刺状结构30109,尖刺状结构30109可对大葱葱叶部分进行扶持,辅助将大葱逐步放平。
左导葱带30101和右导葱带30107分别由两个导葱带驱动马达30108通过带轮驱动,并同时扭转一定角度,夹持住大葱根部,将大葱在输送的过程中逐步扭转至接近水平方向。扶葱带30102由联轴器30104驱动扶葱带驱动轮30103带动,与左导葱带30101和右导葱带30107同步,扶持大葱上部,以防大葱在输送翻转的过程折断,逐步将大葱放平,最终实现大葱导向放平。
参照附图14所示,收集平台总成7主要包括导向板701、支撑杆702、平台支架703、操作平台704和延展平台705等。收集平台总成7通过平台支架703固定在机架总成4上;导向板701倾斜设置,导向板701与水平设置的操作平台704连接,操作平台704与可折叠的延展平台705连接,导向板701由夹持输送机构3向操作平台704倾斜向下设置。
导向板701侧部通过可伸缩支撑杆702与平台支架703连接;延展平台705侧部通过另一可伸缩支撑杆与平台支架703连接。可伸缩支撑杆采用现有技术,在此不再赘述。
导向板701将夹持输送装置3输送过来的大葱依靠重力导向滑落至操作平台704,然后在操作平台704上人工作业,延展平台705采用可折叠结构,在工作时可以扩大作业平台面积。
本公开履带自走式大葱联合收获机的工作过程是:
行走总成采用履带式后置驱动结构,固定在机架总成上,为收获机提供行走驱动。驱动总成通过行走变速箱驱动行走总成,通过液压系统驱动整机工作部件工作。
工作时,由油缸带动限深清土机构下降,限深清土机构首先将葱垄两侧土壤进行清理,同时支撑轮起到限制挖掘深度和行走导向的作用。
设备前行,振动挖掘机构深入葱垄底部,通过挖掘铲振动的方式减小收获机前进阻力,将葱垄整体挖掘抬升,沿挖掘铲上铲面向后输送。
夹持输送机构的底部输送装置深入到振动挖掘机构内部,与挖掘铲衔接,将挖掘铲挖起的大葱和包裹土壤整体从底部向上输送,使葱垄整体由滑动输送转为链条驱动主动输送。一级夹持输送装置安装在底部输送装置上方,与底部输送装置同步,夹持葱垄土壤包裹部位,将大葱同步向上输送;同时,在夹持输送过程中,实现葱垄的成一定角度的折向输送,达到松动葱垄土壤的目的。二级夹持输送装置固定在一级夹持输送装置的尾部上方,与一级夹持输送装置衔接,夹持住大葱的分叶处,将大葱向上夹持输送;同时,底部输送装置输送结束,使土壤自然脱落,达到去土的目的。导葱装置固定在二级夹持输送装置尾部下方,与二级夹持输送装置衔接,夹持住大葱根部,将大葱由竖直缓慢放平,输送至收集平台总成。收集平台总成为大葱的整理存放平台,由人工在平台上对大葱进行捆扎、包装等,并转移存放。
收获完成后,由油缸提升限深清土机构,进而通过连杆提升夹持输送机构和振动挖掘机构,将工作机构抬起转场。
上述虽然结合附图对本公开的具体实施方式进行了描述,但并非对本公开保护范围的限制,所属领域技术人员应该明白,在本公开的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本公开的保护范围以内。
以上所述仅为本申请的优选实施例而已,并不用于限制本申请,对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。
Claims (9)
1.一种履带自走式大葱联合收获机,其特征是,包括机架总成,机架总成上设有限深清土机构、振动挖掘机构、夹持输送机构、收集平台总成;
所述限深清土机构通过连杆与夹持输送机构固接,夹持输送机构倾斜向上设置,夹持输送机构的低端与振动挖掘机构固接,收集平台总成配合设置于夹持输送机构的高端;
所述限深清土机构包括两个对称铰接于机架总成两侧的限深松土部件,所述限深松土部件包括水平设置的限深臂,限深臂端部与倾斜设置的限深轮连接,所述限深臂中部通过第一传动机构与松土刀部件连接;
所述振动挖掘机构包括铲架,所述铲架一端通过偏心轴与连接座连接,铲架另一端设置挖掘铲,连接座与机架总成固接,所述偏心轴由第二传动机构传递动力转动,所述铲架靠近挖掘铲的侧部设置长槽,长槽内配合设置可沿长槽滑动的滑套,滑套与夹持输送机构固接,由铲架围绕偏心轴的振动与相对滑套的滑动,使挖掘铲作横向长椭圆形振动,实现振动挖掘;
所述夹持输送机构包括,固定设置于铲架内且与挖掘铲连接的底部输送装置,底部输送装置上方配合设置一级夹持输送装置,两者固接且同步输送;所述一级夹持输送装置包括相对配合设置的第一夹持带组和第二夹持带组,两者结构相同且两者之间形成折线形输送通道;所述一级夹持输送装置末端上方配合设置二级夹持输送装置,二级夹持输送装置末端下方配合设置导葱装置;
所述二级夹持输送装置包括,结构相同且相对配合设置的第一夹持输送组件和第二夹持输送组件,二者沿二者之间的接触面相对称设置;
所述导葱装置包括相对配合设置的第一导葱带和第二导葱带,所述第一导葱带和第二导葱带沿输送方向均由二级夹持输送装置的倾斜方向扭转至竖直向;
所述导葱装置还包括扶葱带,所述扶葱带环绕在扶葱带驱动轮和扶葱带被动轮上,所述扶葱带由第二导葱带中部上方向第二导葱带末端倾斜设置。
2.如权利要求1所述的履带自走式大葱联合收获机,其特征是,所述限深臂还通过伸缩部件与机架总成固定连接;所述铲架在竖直方向倾斜设置,铲架上表面具有凹槽;所述长槽水平设置。
3.如权利要求1所述的履带自走式大葱联合收获机,其特征是,所述挖掘铲在竖直方向倾斜设置,所述挖掘铲包括铲脊,所述铲脊两侧均与铲刃固接,铲刃侧部与连接板固接,连接板与铲架固定连接;所述铲刃通过多根导向杆与夹持输送机构连接。
4.如权利要求3所述的履带自走式大葱联合收获机,其特征是,所述铲脊包括相连接的两倾斜板,倾斜板由与另一倾斜板的连接处向铲刃方向倾斜向下设置,两倾斜板的倾斜角度相同;
所述倾斜板与铲刃、连接板之间形成通道,且通道面积由低端向高端逐渐减小。
5.如权利要求3所述的履带自走式大葱联合收获机,其特征是,所述铲刃包括相连接的第一连接板和第二连接板,两连接板倾斜向上设置,且第二连接板位于第一连接板上部,第二连接板的倾斜角度大于第一连接板的倾斜角度;所述连接板与铲刃相互垂直设置。
6.如权利要求1所述的履带自走式大葱联合收获机,其特征是,所述收集平台总成包括倾斜设置的导向板,导向板与水平设置的操作平台连接,操作平台与可折叠的延展平台连接,所述操作平台底部通过平台支架固定于机架总成;所述导向板由夹持输送机构向操作平台倾斜向下设置;所述导向板侧部通过可伸缩支撑杆与平台支架连接;所述延展平台侧部通过另一可伸缩支撑杆与平台支架连接。
7.如权利要求1所述的履带自走式大葱联合收获机,其特征是,所述一级夹持输送装置带动大葱折向输送以松动葱垄土壤;所述二级夹持输送装置输送大葱至导葱装置处,导葱装置夹持住大葱根部并将其由竖直放平并输送至收集平台总成;所述底部输送装置、一级夹持输送装置、二级夹持输送装置均倾斜向上设置。
8.如权利要求1所述的履带自走式大葱联合收获机,其特征是,所述扶葱带带面上设置尖刺状结构。
9.如权利要求1所述的履带自走式大葱联合收获机,其特征是,所述第一夹持输送组件包括二级夹持带,二级夹持带环绕设置在二级驱动带轮和二级张紧轮上,所述二级驱动带轮和二级张紧轮之间设置支撑杆,支撑杆沿二级夹持带的运转方向设置多个夹持张紧装置,夹持张紧装置端部支撑张紧二级夹持带。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910702720.5A CN110337886B (zh) | 2019-07-31 | 2019-07-31 | 一种履带自走式大葱联合收获机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910702720.5A CN110337886B (zh) | 2019-07-31 | 2019-07-31 | 一种履带自走式大葱联合收获机 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110337886A CN110337886A (zh) | 2019-10-18 |
| CN110337886B true CN110337886B (zh) | 2020-11-20 |
Family
ID=68183581
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910702720.5A Active CN110337886B (zh) | 2019-07-31 | 2019-07-31 | 一种履带自走式大葱联合收获机 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110337886B (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114375673A (zh) * | 2022-02-24 | 2022-04-22 | 山东省农业机械科学研究院 | 一种自走式生姜联合收获机 |
| CN114766175B (zh) * | 2022-05-31 | 2023-09-22 | 山东省农业机械科学研究院 | 一种挖掘松土输送组件及联合收获机 |
| CN115053687A (zh) * | 2022-06-23 | 2022-09-16 | 青岛农业大学 | 挖拔组合式生姜收获机 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0984422A (ja) * | 1995-09-21 | 1997-03-31 | Kobashi Kogyo Co Ltd | 自走式白ねぎ収穫機 |
| CN105075487B (zh) * | 2015-09-29 | 2017-03-08 | 青岛农业大学 | 大葱收获机 |
| CN106068879B (zh) * | 2016-08-11 | 2017-11-03 | 新乡地隆药业机械有限公司 | 自走式浅型根茎联合收获机 |
| CN106941854B (zh) * | 2017-05-05 | 2023-04-07 | 山东省玛丽亚农业机械有限公司 | 一种履带自走式大蒜收获机 |
| CN107409592A (zh) * | 2017-08-24 | 2017-12-01 | 山东省农业机械科学研究院 | 自走式大蒜联合收获机 |
-
2019
- 2019-07-31 CN CN201910702720.5A patent/CN110337886B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN110337886A (zh) | 2019-10-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110337886B (zh) | 一种履带自走式大葱联合收获机 | |
| US4172352A (en) | Apparatus for harvesting fruit | |
| CN1292635C (zh) | 芹菜收获机 | |
| KR100871106B1 (ko) | 구근작물 수확기 | |
| CN112005695A (zh) | 一种大蒜联合收获机 | |
| CN201323764Y (zh) | 一种秸秆收割机 | |
| CN1072054A (zh) | 采茶机 | |
| JP3463758B2 (ja) | 非結球葉菜収穫機 | |
| CN210298556U (zh) | 一种自走式全自动大蒜收割装置 | |
| JP4286567B2 (ja) | 青葱収穫機 | |
| CN108811707B (zh) | 夹拔耙土装置 | |
| CN2750642Y (zh) | 芹菜收获机 | |
| JP2000004629A (ja) | 収穫機 | |
| US2585416A (en) | Celery harvester | |
| CN219019568U (zh) | 一种白萝卜联合收获机 | |
| JP2829509B2 (ja) | 収穫機 | |
| JP3298835B2 (ja) | 自走球葱収穫機 | |
| JP2000004627A (ja) | 泥土除去装置付き根菜収穫機 | |
| JP3279553B2 (ja) | 自走球葱収穫機 | |
| JP3699251B2 (ja) | 根菜収穫機 | |
| JP3279445B2 (ja) | 自走球葱収穫機 | |
| JP3647617B2 (ja) | 根菜収穫機 | |
| CN117242972A (zh) | 生姜收获机 | |
| JP2000004626A (ja) | 根菜収穫機 | |
| JP3636542B2 (ja) | 根菜収穫機の前処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |