CN110337523B - 机动车辆中的滑动车窗的自动运动设备的防夹方法及装置 - Google Patents
机动车辆中的滑动车窗的自动运动设备的防夹方法及装置 Download PDFInfo
- Publication number
- CN110337523B CN110337523B CN201880012999.8A CN201880012999A CN110337523B CN 110337523 B CN110337523 B CN 110337523B CN 201880012999 A CN201880012999 A CN 201880012999A CN 110337523 B CN110337523 B CN 110337523B
- Authority
- CN
- China
- Prior art keywords
- motor
- window
- electrical quantity
- signal
- pinch
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02H—EMERGENCY PROTECTIVE CIRCUIT ARRANGEMENTS
- H02H7/00—Emergency protective circuit arrangements specially adapted for specific types of electric machines or apparatus or for sectionalised protection of cable or line systems, and effecting automatic switching in the event of an undesired change from normal working conditions
- H02H7/08—Emergency protective circuit arrangements specially adapted for specific types of electric machines or apparatus or for sectionalised protection of cable or line systems, and effecting automatic switching in the event of an undesired change from normal working conditions for dynamo-electric motors
- H02H7/085—Emergency protective circuit arrangements specially adapted for specific types of electric machines or apparatus or for sectionalised protection of cable or line systems, and effecting automatic switching in the event of an undesired change from normal working conditions for dynamo-electric motors against excessive load
- H02H7/0851—Emergency protective circuit arrangements specially adapted for specific types of electric machines or apparatus or for sectionalised protection of cable or line systems, and effecting automatic switching in the event of an undesired change from normal working conditions for dynamo-electric motors against excessive load for motors actuating a movable member between two end positions, e.g. detecting an end position or obstruction by overload signal
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/40—Safety devices, e.g. detection of obstructions or end positions
- E05F15/41—Detection by monitoring transmitted force or torque; Safety couplings with activation dependent upon torque or force, e.g. slip couplings
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/60—Power-operated mechanisms for wings using electrical actuators
- E05F15/603—Power-operated mechanisms for wings using electrical actuators using rotary electromotors
- E05F15/665—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for vertically-sliding wings
- E05F15/689—Power-operated mechanisms for wings using electrical actuators using rotary electromotors for vertically-sliding wings specially adapted for vehicle windows
- E05F15/697—Motor units therefor, e.g. geared motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P7/00—Arrangements for regulating or controlling the speed or torque of electric DC motors
- H02P7/0094—Arrangements for regulating or controlling the speed or torque of electric DC motors wherein the position is detected using the ripple of the current caused by the commutator
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME RELATING TO HINGES OR OTHER SUSPENSION DEVICES FOR DOORS, WINDOWS OR WINGS AND DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION, CHECKS FOR WINGS AND WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05Y2900/00—Application of doors, windows, wings or fittings thereof
- E05Y2900/50—Application of doors, windows, wings or fittings thereof for vehicles
- E05Y2900/53—Application of doors, windows, wings or fittings thereof for vehicles characterised by the type of wing
- E05Y2900/55—Windows
Abstract
一种用于机动车辆中的滑动车窗的自动运动的设备特别是电动车窗设备的防夹方法,所述设备包括直流电动马达(M),直流电动马达(M)使得车窗(F)运动,从而车窗(F)沿导轨滑动,所述方法包括:‑接收所述马达(M)的至少一个电学量(ea,ia);‑对所述至少一个电学量(ea,ia)的振荡周期(Rd)计数(Rc);‑根据电学量(ea,ia)的周期数量(Rc)来计算马达(M)的角位置((θ(t));‑根据马达(M)的角位置((θ(t))来计算车窗(F)的位置;以及‑如果所述车窗(F)的位置落入防夹区域(APZ)内并且马达(M)的运动至少部分地被阻止,则反转马达(M)的旋转方向。所述方法设想:‑接收所述马达(M)的多个电学量(ea,ia);‑选择电学量以便对在根据马达(M)的操作步骤(停止(STOP),向上运行(RUN UP),向下运行(RUN DOWN))产生的通过控制信号(模式)接收的所述多个电学量(ea,ia)中的所述至少一个电学量的振荡周期(Rd)进行计数(Rc)。
Description
技术领域
本发明涉及一种用于机动车辆中的滑动车窗的自动运动的设备(特别是电动车窗设备)的防夹方法,所述设备包括直流电动马达,直流电动马达使得车窗运动,从而车窗沿导轨滑动,所述方法包括以下步骤:接收电动马达的一个或多个电学量,对电学量的振荡周期进行计数,根据通过先前计算的振荡周期数量计算出的马达角位置来计算车窗的位置,并且最后,如果车窗的位置落入防夹区域内并且同时马达的运动被部分地或者完全阻止,则反转马达的旋转方向。
背景技术
本文具体参考机动车辆的电动车窗设备描述上述技术,但是也可以参考用于车窗的其他马达驱动装置或者引起导致夹住的风险的等效元件描述上述技术,等效元件诸如沿着车辆上所提供的导轨的面板,诸如可打开的天窗。
电动车窗设备是由机电系统构成的装置,借助于该机电系统,通过将车窗在两侧上约束到由两个平行导轨构成的路径,在空间中仅在两个方向上产生车窗的位移。借助于由直流电动马达驱动的杠杆系统,车窗沿着两个导轨滑动。
连接到上述杠杆系统的轴装配在电动马达的转子的旋转方向上,电动马达的转子的旋转方向确定车窗的运动方向。
插入机动车辆车门中的电动车窗设备的半自动或自动操作设想存在直流电电动马达(其中车窗的位移直接取决于施加在按钮上的压力并且随着压力停止而停止),特别是由电子电路自动控制。在自动操作模式下,通常设想所谓的防夹安全功能。事实上,在自动模式下,车窗的位移是施加在连接到控制电动马达操作的电子电路的按钮上的压力的结果。除了“按下按钮/释放按钮”信息之外,电子控制电路还解释边界条件,诸如马达中的电流,因为已经到达行程终端或是因为沿着车窗的路径遇到障碍物,马达中的电流值在车窗停滞之后马达的运动被阻止的瞬间瞬时增加。
因此,在自动模式下,电动车窗系统能够评估关于安全性的条件,并且因此可以引入防夹功能,其包括当遇到障碍物时或当证明运动有问题时,例如在人的手指碰巧挡道并且因此有可能在上升的车窗和电动车窗窗框的顶部边缘之间受到夹挤(具有明显的创伤后果)的情况下,车窗向上运动的方向反转。
防夹系统的可靠性和高灵敏度必须能够在存在障碍物的情况下自动反转车窗的运动;因此,在这方面,系统被校准以对严格的测试条件作出积极响应。
特别地,标准(FMVSS118(美国)-74/60/EEC(欧洲)(FMVSS118(USA)-74/60/EEC(Europe)))将防夹区域定义为包括在行程顶端(或电动车窗窗框的顶部边缘)下方4mm至200mm之间的区域。系统所经受的测试设想到的是在存在障碍物的情况下,车窗必须不能施加高于100N的力,其中物体具有的挠度比可在5Nm和20Nm之间。
图11是由附图标记50整体标示的电动车窗设备的示例的示意图。设备50包括以绕旋转轴线的角速度ω转动的马达M,并且通过马达减速器51来致动滑动缆线55,滑动缆线55经由设置在车窗F的在顶端行程CFu和底端行程CFd之间的行程路径CF的底端57和顶端56处的两个滑动辊56和57使得连接到车窗F的车窗接合元件52运动,以使上述车窗沿着由P指定的路径在导轨54中滑动(为简单起见,在图中表示为纯垂直的)。车窗F沿着路径P以线速度v运动,线速度v通常经由常数与角速度ω成正比,该常数除了其他参数之外由马达减速器51的减速比确定。由53标示用于将设备50接合到车门上的元件。由APZ表示的是沿着路径P相对于行程顶端CFu定义的防夹区域。
已知简单的电动车窗设备不包括位置传感器,但是过程参数(诸如在车窗玻璃和滑动导轨之间设置的耐候性橡胶的阻率),通过测量点的适当校准,根据车窗位置而变化。然而,可以实现的作为有效防夹系统的最重要参数的精度并不是很高。
已知通过下述以更精确的方式操作,即通过使用电子控制电路存储在适当校准之后的车窗位置,经由传感器(最广泛用于此类应用的传感器类型是霍尔效应传感器,其中编码器安装在印刷电路上,而编码器又布置在装配在马达轴上并包含磁体的磁盘附近)的集成来利用行程的顶端和行程的底端,并且经由电子电路处理一系列参数(电动马达本身的参数特性和与电路相关的参数,诸如根据摩擦力而变化的电流值),从而评估系统的摩擦力,以便适应于可能的变化,所述变化不仅是短期发生的变化而且还有由于老化导致的变化。该系统更精确,但需要准确了解系统校准过程中使用的马达的电气参数;即,例如,必须用相同型号或相同特性的电动马达进行的电动马达的任何可能的更换;否则,就不能保证初始特性和性能。此外,该系统需要特定的传感器来检测车窗的位置。
此外,已知用于电动车窗设备的防夹方法,其包括接收马达的电学量,诸如电枢电流,对其振荡周期进行计数,以及根据被计数的周期数量来计算电动马达的角位置,以便根据马达的所述角位置的函数来计算车窗的位置,并且如果车窗的位置落入防夹区域并且马达的运动至少部分被阻止,则反转马达的旋转方向。
然而,上述方法可能在电动车窗的马达的所有操作步骤中进行位置的连续控制时存在缺陷。
发明内容
本发明的目的是提供一种改进的方法,该方法将使得能够在不借助外部传感器器件的情况下精确确定车窗沿其路径的位置,将与系统特别是电动马达的典型(和寄生)参数无关,并且将使在电动车窗的马达的所有操作步骤中更容易地执行位置的连续控制成为可能。
根据本发明,由于用于机动车辆中的滑动车窗的自动运动的设备(特别是电动车窗设备)的防夹方法和包括直流电电动马达的相应的自动电子电动车窗设备以及相应的防夹装置而实现上述目的,上述具有在随后的权利要求中以特定方式所述的特征。
附图说明
将参考附图来描述本发明,附图仅通过非限制性示例的方式提供,并且其中:
-图1是能够实施根据本发明方法的用于滑动车窗自动运动设备的控制电路的框图;
-图2表示在所述设备中运行的马达的控制逻辑;
-图3表示直流电动马达的等效电气模型;
-图4是实施根据本发明方法的设备的控制电路的模块的框图;
-图5是表示用于一个或多个实施例的操作的不同信号的时间曲线图的图;
-图6A和图6B分别是表示在根据本发明方法操作的设备中的马达的电枢电流的时间曲线图的图和表示未供应的在根据本发明方法操作的设备中运行的马达中的反电动势的时间曲线图的图;
-图7是表示用于一个或多个实施例的操作的各种信号的时间曲线图的图;
-图8是根据本发明设备的控制电路的框图;
-图9A、图9B和图9C示出实施根据本发明方法的设备的一部分控制电路的操作步骤;
-图9D和图9E示出根据现有技术的设备的一部分控制电路的操作步骤;
-图10是表示根据本发明方法的实施例的流程图;以及
-图11示出能够实施根据本发明方法的用于机动车辆的电动车窗设备的原理图。
具体实施方式
简而言之,根据本发明的解决方案通常设想在电动车窗设备中利用直流马达的电学量,特别是来自马达的反电动势和电枢电流,以提取关于马达转子位置的信息,并在此基础上在马达的运动被阻止的情况下反转马达的旋转方向。
为了驱动电动马达M,设想到例如采用PWM(脉冲宽度调制)模式。直流马达供应的PWM模式本身对于本领域内的技术人员而言是已知的,并且对于电动马达M设想到的是,给定总周期ttot=t1+t2,向马达M的端子A,B施加电压v=va持续等于第一接通(ON)时间t1的一段时间并且施加零电压v=0持续随后的断开(OFF)时段t2。
通过控制接通(ON)时间t1和断开(OFF)时间t2的值,马达M的旋转可以保持恒定,因为在电压未施加到其端子的时段期间,马达M因为系统的惯性倾向于继续其运动。
电动马达M是由配备有微控制器并实施特定软件策略的电子电路控制的直流电动马达,其使在两个方向上通过两个平行导轨约束在其路径上的车窗表面(玻璃或类似材料)能够滑动并且控制该滑动。通过施加在机电按钮上的压力来控制在两个方向上的滑动。上述表面可以是由位于具有防夹功能的机动车辆的车门中的电动车窗系统运动的车窗玻璃,或者可以是电动滑动打开和关闭的天窗。
图1中所示的是通过可能的防夹电路装置10的示例提供的框图,该防夹电路装置10配置成控制用于耦联到马达M的车窗F的自动运动的设备。由附图标记M标示直流电动马达,例如电动车窗设备的直流电动马达,其耦联到待位移的物体,例如车窗。例如,马达可以是PMDC(永磁直流(Permanent-Magnet DC)类型的电动马达。由A和B表示的是电动马达M的端子。
由CU标示的块是控制单元,其具有以下功能:
-获取用于使得马达M运动的请求信号,马达M的运动用于关闭车窗F,即使车窗向上滑动,up,以及用于打开车窗F,即使车窗向下滑动,dw;
-根据由用户进行的用于使得电动马达运动的请求产生的运动请求信号up,dw的值,通过跨马达M施加到端子A和B的电枢电压va驱动马达M;以及
-控制在电枢电流ia和反电动势ea之间的电学量的选择操作,并经由操作模式信号模式和马达的运动方向信号dir来控制纹波计数器单元RCU,操作模式信号模式和马达的运动方向信号dir由控制单元CU产生。
在一个或多个实施例中,纹波计数器单元RCU在输入处接收来自控制单元CU的电学量(即在与电枢电压va施加到其的那些相同的端子A,B处获得的反电动势ea和电枢电流ia),以及操作模式信号模式和运动方向信号dir。控制单元RCU基于这些量和输入信号配置成在输出处产生信号Rc,该信号Rc表示用于计算马达角位置的数量,其与电学量的振荡的数量成比例。
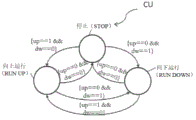
图2示出更详细地示出如由关闭信号up和打开信号dw管理的用于驱动马达M的上述控制单元CU的操作的图。特别地,图2可以表示具有三种可能状态的有限状态机器:向上运行(RUN UP),其中车窗被摇上,向下运行(RUN DOWN),其中车窗被摇下,并且最后是停止(STOP),其中马达关闭或停止。在一个或多个实施例中,控制单元CU根据操作状态产生两个信号,即操作模式信号模式和运动方向信号dir。
例如,可以从停止(STOP)状态开始操作。在这种状态下,信号模式具有值MV(即选择振荡周期计算中的反电动势),而信号dir的值不改变。
如果信号采取以下值,则状态机器从停止(STOP)状态退出:
-up=1以及dw=0:在这种情况下,机器进入向上运行(RUN UP)状态,其中车窗被摇上;以及
-up=0以及dw=1:在这种情况下,机器进入向下运行(RUN DOWN)状态,其中车窗被摇下。
向上运行(RUN UP)状态又示例性说明通常与向上运动一致的车窗的关闭运动。在这种状态下,信号模式和dir分别采取值MI/电流和-1。
如果up和dw值采取以下值,则状态机器从向上运行(RUN UP)状态退出:
-up=0以及dw=0:在这种情况下,机器返回停止(STOP)状态;以及
-up=0以及dw=1:在这种情况下,机器进入向下运行(RUN DOWN)状态。
最后,向下运行(RUN DOWN)状态示例性说明通常与向下运动一致的车窗的打开运动。在这种状态下,信号模式和dir分别采取值MI/电流和1。
如果信号up和dw采取以下值,则状态机器从向下运行(RUN DOWN)状态退出:
-up=0以及dw=0:在这种情况下,机器进入停止(STOP)状态;以及
-up=1以及dw=0:在这种情况下,机器返回向上运行(RUN UP)状态。
应该注意的是,上述信号值是完全任意的,并且可以使用任何替代形式的驱动,例如,当信号dw等于-1并且信号up等于0时,发生车窗的向上运动。同样,信号模式和dir可以根据一个或多个实施例基于采用的操作状态和惯例来改变它们自身的值,例如,在系统的起点是在车窗的最大打开点而不是最大关闭点的情况下。
状态机器可以在微处理器中实现,例如下文在图8中所示的微处理器21中实现,其产生控制信号DS,或者在另一个微处理器或微控制器中实现。微处理器或微控制器同样可以作为其输出而产生信号模式和dir,例如在其输入上接收马达M的电学量,诸如电枢电压和电流,以便验证马达M是在停止(STOP),向上运行(RUN UP)或者向下运行(RUN DOWN)的哪种状态下。当然,用于产生信号模式和dir的其他类型的控制模块或电路也是可能的。
在图3中示例性说明电动马达M的理论机电表示。如图1中所示,端子A和B接收用于驱动马达M的电压va,而电枢电流由附图标记ia表示。
Ra是马达M的电枢电阻,La是马达M的电枢电感,以及ea是电动马达M的反电动势(BEMF),其与转子的角速度ωr成比例。
电动马达M可由以下一对微分方程式表示:


其中J,Kt,B和τr分别是转子的转动惯量(the moment of inertia)、马达的机械常数、转子轴的摩擦力和施加在转子上的外部转矩。
如从方程式(1)可以看出的那样,施加的电压va分为反电动势ea、由于电枢电阻引起的电压降VR=Ra·ia,以及由于电枢电感引起的电压降VL=La·dia/dt,它们两者都与马达M的绕组相关。
反电动势ea又可以分解成直流(或平均值)分量eaDC和交流分量eaAC。在交流分量是纯正弦的情况下,这两个分量将用以下方程式描述:
ea=eaDC+eaAC (3)

eaAC=Keωrγsin(Npωrt)=ea-eaDC (5)
其中Ke是马达的电常数,γ是一个系数,它取决于电动势(emf)的振荡(纹波)幅度,Np是转子的极数,以及t是时间。因此,我们发现电动势ea可以与转子角速度ωr的值成比例,这意味着,通过跨电动马达M的端子A,B施加电压,电动马达M绕其轴线(主轴围绕该轴线装配)以其自身的旋转速度ωr旋转,其自身的旋转速度与反电动势ea的值成比例。应该注意的是,纹波是反电动势eaAC的交流分量的结果,其振荡周期T为:

还应注意的是,转子的完整旋转对应于周期数量等于Np的反电动势的交流分量eaAC的多个周期;实际上,当t=Np·T时的理论角位置θ为:

图4通过示例的方式表示纹波计数器单元RCU。如前所述,该单元在输入处接收电枢电流ia的值、跨马达例如在端子A和B处的电压的值(如上所述,其通常是电枢电压va,但在感兴趣的状况下,即当发动机关闭时,它是反电动势ea)、操作模式信号模式的值(例如其可以是电压MV,或者是电流MI,如通过控制单元CU以选择性的方式所决定的)和电动马达方向信号dir的值(在一个或多个实施例中,该信号可以根据马达M的旋转方向采取值+1或-1)。单元RCU可以在输出处回馈变量Rc,其表示所考虑的电学量的振荡数量。本发明的目的是通过计算输入量(电枢电流ia或电枢电压va)上的纹波周期数量来评估马达的角位置。
波纹计数器单元RCU的工作原理描述如下。
模数转换器(ADC)100对输入处的电学量(电枢电压va和电枢电流ia)进行采样并将它们作为数字量回馈。由信号模式驱动的开关102从转换器100的输出处的数字电学量中“选择”电计数量RCUin,其用于对纹波的振荡计数。在将电枢电压va选择为电计数量RCUin的情况下,从其推导出反电动势ea,信号模式采取值MV,以及在将电枢电流ia选择为电计数量RCUin的情况下,信号模式采取值I。在一个或多个实施例中,接收电计数量RCUin的自适应数字滤波器(自适应HP滤波器)104配置成抑制输入量的低频谐波分量,其中滤波器的截止频率由通过框106计算的输入信号Fr线性地控制。
上述框106表示纹波检测器,其在输入处接收来自滤波器104的输出处的滤波后的电数字计数量RCUin,其表示基于信号模式的值选择的由于反电动势引起的振荡,并且返回识别信号Rd,其通知识别已经过去的振荡周期的事件。识别信号Rd在识别事件发生的情况下采取值1(Rd=1),以及在剩余时段内采取值0(Rd=0)。在实践中,识别信号Rd表示为具有脉冲的信号,该脉冲对应于已经过去的振荡周期的识别事件;因此,如果计数信号RCUin在一段时间间隔内呈现连续振荡,则识别信号Rd表现为由振荡周期彼此分开的一连串脉冲(其又可以随时间变化)。
纹波检测器106可配置成发信号通知存在半周期而不是全周期。同样,在这种情况下,信号Rd在半周期出现时呈现脉冲Rd=1,否则呈现脉冲Rd=0。以这种方式,考虑到给定半周期而不是整个周期,总计数值将是两倍高。
纹波检测器106可以通过配置它来实现,以便使用自适应阈值来寻找电计数量RCUin的局部(上或下)峰值。纹波检测器106还确定纹波脉冲的频率Fr,其控制滤波器104的截止频率。
框108表示纹波积分器,其在脉冲计数变量Rc(t)中加上或减去由纹波检测器106在输出处提供的在输入识别信号Rd的时候的值。
框108在车窗F下降(例如它正在打开)的情况下当方向信号dir具有等于+1的值时计算加法,而在车窗F上升(例如它正在关闭)的情况下当方向信号dir具有等于-1的值时它计算减法。换句话说,积分器框108实现以下操作:
Rc(t)=Rddir+Rc(t)
因此,可以从以下方程式推导出马达角位置的值:

其中Np是转子的极数。
一旦获得上述信息,就可以容易地计算车窗的线性位置:系统的起点例如是可以达到的最高点,即车窗关闭时的位置,以及其计算的位置将与角位置θ(t)的值成比例。
图5是通过示例提供的一个或多个实施例的可能时间曲线图,并且被分成对应于图2中示例的马达的三个操作状态的三个时间部分:
-摇下状态,如从以下事实可以理解到的那样,即信号dw和up具有值dw=1以及up=0:马达M使得车窗向下运动,例如打开车窗,并且因此信号模式=MI(在图5中通过值模式=0示例性表示)并且生成dir=1;给定信号dir具有正值,通过递增脉冲计数变量Rc(t)的值,在脉冲计数器单元RCU中添加在输入识别信号Rd中观察到的脉冲;
-马达M的停止状态,如从以下事实可以理解到的那样,即信号dw和up具有值dw=0以及up=0:因此,产生信号模式=MV(在图5中通过值模式=1示例性表示),并且信号dir保持不变;通过递增脉冲计数变量Rc(t)的值,在纹波计数器单元RCU中添加在输入信号Rd中观察到的脉冲(即信号dir的正值或负值保持不变;实际上,在模式MV下的马达不改变旋转方向)-由于马达M关闭并因此逐渐减速的事实,该值增加得更慢;以及
-摇上状态,如从以下事实可以理解到的那样,即信号dw和up具有值dw=0以及up=1:马达M使得车窗向上运动,例如关闭车窗,并且信号模式=MI(在图5中通过值模式=0示例性表示)并且因此生成dir=-1;通过递减脉冲计数变量Rc(t)的值,在纹波计数器单元RCU中减去在输入信号Rd中观察到的脉冲。
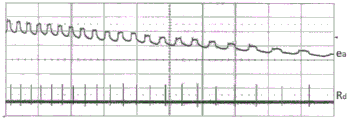
图6A示出在跨马达M的端子A,B两端施加阶跃电压(模式=MI,电流)的情况下电枢电流的可能曲线图;注意由于反电动势的振荡引起纹波。图6B示出在保持供应电路断开(open)并且马达M的转子具有非零初始角速度ωr(即马达M的转子由于机械惯性而继续转动的马达M的转子,并且因此跨马达M两端即在端子A和B处产生与其速度成比例的反电动势)的假设下具有类似纹波的反电动势ea(模式=MV,电压)的曲线图。应当注意,随着时间的推移,反电动势的振荡逐渐变得不那么强烈,表明由于转子的旋转惯性损失导致马达逐渐减速。
当电枢电流ia不可用时,反电动势ea证明是有用的,例如,在马达的关闭状态(停止(STOP))期间的某些电路解决方案中。在这些情况下,防夹电路装置配置成选择反电动势ea而不是电枢电流ia(框102),特别是通过实现电动马达M的驱动,该驱动可用于对上述反电动势的纹波计数(其中由控制单元CU选择的模式是MV),以便评估耦联到马达M的车窗位置。
出现在振荡电学量下方的两个脉冲信号是通过信号Rd的可能时间曲线图的示例提供的。
图7中示例性表示的是在电路实施例中发生从电流模式(模式=MI)到电压模式(模式=MV)的转换的情况,该电路实施例在马达M关闭时不能观察到电流ia。在这种情况下,示出三个信号的时间曲线图:电枢电压va、电流ia和识别信号Rd。
转换时刻由信号up和dw的值转到零的时刻表示,即up=0以及dw=0,在用于中断马达M的运动的手动命令(由用户发出)或自动命令(在达到行程终端位置的情况下)的情况下,这种情形在电枢电流ia下降到零值时出现。在这种情况下,电压va更具体地说是电动势ea成为下述信号,即相关于上述信号,在脉冲计数变量Rc中,对经过时间段T的事件Rd计数。再一次,可以注意到一旦触发电压模式MV,Rd中的脉冲频率逐渐降低。如上所述,这些转换可以通过分析电枢电流和电压的微处理器来评估。
图8中示意性地描述防夹电路装置的实施例20,所述防夹电路装置用于控制机动车辆中的滑动车窗的自动运动的设备,特别是电动车窗设备,防夹电路装置的实施例20基本上包括控制电路,该控制电路包括微处理器21,微处理器21将控制信号(例如,PWM信号,在图8中用DS表示,具有接通(ON)时间t1和断开(OFF)时间t2)发出到H桥电路22,特别是由驱动电动马达M的电池电压Vbatt供应。
特别地,由附图标记DS表示的控制信号可以包括马达M的驱动信号,以及H桥电路22的控制信号。这些控制解决方案在本领域中是已知的,并且本文的任何进一步解释说明是被认为是多余的。
跨所述马达M的端子A和B获得的是相应的电压值EMFA和EMFB,它们均被发送到第一运算放大器调节电路23和第二运算放大器调节电路24,所述第一运算放大器调节电路23计算减法EMFA-EMFB,称为向上位移信号EMFUP,用于马达的旋转以使车窗F向上运动,所述第二运算放大器调节电路24计算减法EMFB-EMFA,称为向下位移EMFDOWN,用于马达的旋转以使车窗F向下运动。信号EMFUP和EMFDOWN被提供给微处理器21,微处理器21通过第三运算放大器调节电路25接收马达的电流值ia,该电流值ia通过与H桥电路22相关联的具体设置在驱动H桥电路22与接地G之间的分流电阻26测量。马达M的电枢电流ia由电路25计算为电路25跨分流电阻26检测的电压与分流电阻26本身的值之比。
应当注意的是,在一个或多个实施例中,经济上更为有利的变型是可能的,其中通过执行这样的操作来实现对其输入处的量进行减法和除法的操作的有源运算放大器调节电路23,24被只是简单地进行RC滤波的无源调节电路取代。根据参考图4描述的方法,电路装置10因此配置成在信号模式的控制下在不同的操作模式下操作,在电流ia上没有发现振荡以执行纹波计数的情况下,在该不同的操作模式下第三运算放大器调节电路25读取反电动势ea。
微处理器21通常包括功能框100,102,104,106和108,基于电枢电流ia的值产生信号模式。该信号模式根据其是否具有电流值MI或电压值MV可以确定由DS表示的一个或多个控制信号的变化,如下面将参考图9A-图9C更全面地描述的那样。
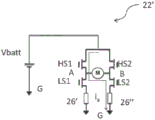
图9A、图9B和图9C实际上是通过H桥电路22的可能实施方式的示例提供的,其包括与马达M的相应端子特别是A和B相关联的第一支路和第二支路,支路包括相应的低侧开关LS1和LS2以及高侧开关HS1和HS2(例如金属氧化物半导体场效应晶体管(MOSFET))。特别地,图9A示出在马达M运动期间H桥22中的电枢电流ia的路径,而图9B和图9C分别描述电枢电流ia的路径和在马达M关闭的情况下获得关于反电动势ea的信息的点。
如图9C中所示,在马达关闭的情况下,通过获取电压值EMFA和EMFB,可以检测马达M的反电动势,即跨马达M的端子A和B的反电动势;特别是在图9C中,这通过获取电压EMFA而发生。
对于与图8的参考相同的那些参考,任何进一步的描述都被认为是多余的。相反,由附图标记LS1,LS2,HS1和HS2标示的是开关(例如金属氧化物半导体场效应晶体管(MOSFET)),其中LS1是H桥22的第一支路的低侧开关,LS2是H桥22的第二支路的低侧开关,HS1是H桥22的第一支路的高侧开关,以及HS2是H桥22的第二支路的高侧开关,根据本领域内已知的方案,它们通过控制信号DS选择性地激活,以便使得电动马达M能够向一个方向或另一个方向转动。例如,图9A中的箭头表示在闭合的开关是HS1和LS2而断开的开关是HS2和LS1的情况下电动马达M的供应电流路径。当开关HS2和LS1闭合而HS1和LS2断开时,发生相反方向的旋转。
图9A、图9B和图9C中示例性说明的电路的特征在于它具有单个分流器,用于检测电学量,特别是电枢电流ia。
如图9C中所示,可以注意到的是,除了电流之外,通过控制除了第二支路LS2的低侧开关(即未连接到在其上获得反电动势ea的马达M的端子的支路的低侧开关)之外的所有开关断开的控制信号DS,特别是通过电路25,如何能够获取跨马达M读取的反电动势ea的值。以这种方式,在常规的检测方法失败的情况下,也可以在关闭期间获得马达的角位置。
如上所述,图4的其他功能框例如可以通过处理器22获得。
为了更全面地理解由根据本发明的方法和实现它的装置所提供的优点,图9D和图9E示出实现根据现有技术的方法的H桥22′,其中通常结构类似并且相同的附图标记表示相同的组件,但是分流模块26通过连接在相应的低侧开关LS1和LS2与接地G之间的两个分流器26′和26”获得。H桥22′因此不构成落入本文所述发明范围内的解决方案的一部分。这种现有方法是常规的,因为它仅使用电枢电流ia来对纹波的振荡计数,并且在使用单个分流器的情况下不能获得对位置的连续控制,例如当马达关闭时。实际上,在车窗摇动状态向上运行(RUN UP)或向下运行(RUN DOWN)中的一种状态下,电枢电流ia呈现如图9D中所示的通过第一支路HS1的高侧开关、马达M和第二支路LS2的低侧开关的路径。以双重方式,在另一个车窗摇动状态中,开关的状态被反转,电枢电流ia通过马达M在通向接地G的路径中从第二支路到达第一支路。两个分流器26′并且26”能够测量电枢电流ia,并因此能够在关闭的操作步骤中计算纹波,其中它呈现如由图9E中箭头所示例性示出的路径。仅使用一个分流器26,就会发生先前参考图9C所示和论述的内容。
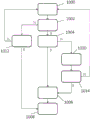
图10描述了一种例如通过有限状态机器以流程图的形式来实施的防夹方法,其考虑了耦联到马达M的车窗F的位置以及由此产生的转矩的读取。在一个或多个实施例中,通过微控制器21实现防夹方法。
该方法设想基于在来自波纹计数器单元RCU的输出处的脉冲计数变量Rc的值来评估车窗F的位置的第一步骤1000。
步骤1002评估车窗F的位置是否落入防夹区域内;以及
-如果是(Y)并且马达的运动被阻止(步骤1004,Y),则执行马达M的旋转反转的步骤1006,这不可避免地导致阻止马达M的步骤1008;
-如果是(Y)并且马达的运动未被阻止(步骤1004,N),则在步骤1010中评估施加在外部障碍物上的力,该力导致夹挤;
-如果否(N)并且电动马达的运动被阻止(步骤1012,Y),则电动马达M进入阻断状态,步骤1008;和
-如果否(N)并且马达的运动未被阻止(步骤1010,N),则控制返回到步骤1000。
评估所施加的力的步骤1010导致步骤1014,其中将评估值与阈值进行比较;以及
-如果评估值不超过阈值(N,步骤1014),则控制返回步骤1000;
-如果评估值超过阈值(Y,步骤1014),则控制转到步骤1006。
应该注意的是,在一个或多个实施例中,对于所施加的力的评估是必要的,因为马达的运动可能被部分地阻止而不是完全阻止,然而,这不应该被考虑用于反转的目的;例如,车窗因使用导致的磨损而上升的摩擦力不应该被考虑(低于阈值),而由于在车窗F关闭期间可能仍被卡住的可变形物体的变形引起的力被考虑(高于阈值)。
从前面的描述中,所述的解决方案及其优点因此清楚地显现出来。
因此,一个或多个实施例提供了能够在不使用传感器的情况下检测车窗F的位置的技术优点,因此在任何电路条件下都可以进行无传感器检测。
特别地,由于该方法基于各种可能的电学量,所以它也能够在电枢电流证明不适合该目的的电路情况下检测位置。
这种优点的电路示例可以由所述的情况表示,其中仅使用一个分流器而不是两个分流器来检测电学量。这导致经济上的节省并且在印刷电路板或集成电路上的负担方面得以节省。
仅基于电枢电流的常规方法不能在某些电路解决方案中连续控制位置,如在使用单个分流器的情况下,例如在马达关闭期间,因为电流在该操作步骤中基本上为零。
Claims (8)
1.一种用于机动车辆中的滑动车窗的自动运动的设备的防夹方法,所述设备包括直流电动马达(M),所述直流电动马达(M)使得车窗(F)运动,从而车窗(F)沿导轨滑动,所述方法包括:
-接收所述马达(M)的至少一个电学量(ea,ia);
-对所述至少一个电学量(ea,ia)的振荡周期(Rd)的数量(Rc)进行计数;
-根据电学量(ea,ia)的周期数量(Rc)来计算马达(M)的角位置(θ(t));
-根据所述马达(M)的角位置((θ(t))来计算车窗(F)的位置;以及
-如果所述车窗(F)的位置落入防夹区域(APZ)内并且马达(M)的运动至少部分地被阻止,则反转马达(M)的转动方向;
所述方法的特征在于:
-接收所述马达(M)的多个电学量(ea,ia);
-选择电学量以便对通过控制信号接收的所述多个电学量(ea,ia)中的所述电学量的振荡周期(Rd)的所述数量(Rc)进行计数,该控制信号根据马达(M)的操作步骤产生,所述电学量在马达(M)的电枢电流(ia)和反电动势(ea)之间进行选择,马达(M)的所述反电动势(ea)在马达(M)的停滞状态期间被选择。
2.根据权利要求1所述的方法,其特征在于包括对所述至少一个电学量(ea,ia)的振荡半周期(Rd)计数(Rc)。
3.根据权利要求1或2所述的方法,其特征在于还包括以下步骤:
-确定(106)纹波脉冲的频率(Fr);以及
-利用自适应滤波器以截止频率(Fr)对电学量(ea,ia)进行滤波(104),以便抑制低频谐波分量,截止频率(Fr)是纹波脉冲的频率(Fr)的函数。
4.根据权利要求1所述的方法,其特征在于包括将输入处的模拟电学量转换(100)为数字电学量。
5.一种防夹电路装置,所述防夹电路装置用于控制机动车辆中的滑动车窗的自动运动的设备,所述设备包括直流电动马达(M),直流电动马达(M)使车窗(F)运动,从而车窗(F)沿导轨滑动;所述装置(10;20)配置成驱动所述马达(M);
所述装置的特征在于,其执行根据权利要求1至4中任一项所述的方法的步骤。
6.根据权利要求5所述的装置,其特征在于所述防夹电路装置(20)包括用于驱动所述马达(M)的H桥(22)和用于测量在连接到所述H桥(22)的分流路径(26)上的电动马达(M)的电流(I)的模块(25,26),以及用于测量在向上滑动或朝向车窗(F)的行程的关闭终端的位置(CFu)滑动期间的马达(M)的反电动势(EMFUP)和在向下滑动或朝向车窗(F)的行程的打开终端的位置(CFd)滑动期间的马达(M)的反电动势(EMFDOWN)的相应的模块(23,24)。
7.根据权利要求6所述的装置,其特征在于所述H桥(22)包括第一支路和第二支路,所述第一支路和第二支路与电动马达(M)的相应端子(A,B)相关联,所述第一支路和第二支路包括相应的低侧开关(LS1,LS2)和高侧开关(HS1,HS2),其中通过H桥(22)的所述低侧开关(LS1,LS2)的电流路径耦联在一起,并且在它们之间设置单个分流器,其是在接地(G)和所述电流路径之间的分流路径(26)。
8.根据权利要求7所述的装置,其特征在于所述低侧开关(LS1,LS2)和高侧开关(HS1,HS2)是金属氧化物半导体场效应晶体管(MOSFET)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| IT102017000023222 | 2017-03-01 | ||
| IT102017000023222A IT201700023222A1 (it) | 2017-03-01 | 2017-03-01 | "Procedimento di anti-pizzicamento per apparato di movimentazione automatica di finestre scorrevoli in un autoveicolo, in particolare un apparato alza-cristallo automatico e relativo dispositivo" |
| PCT/IB2018/050929 WO2018158647A1 (en) | 2017-03-01 | 2018-02-15 | "anti-pinch method for an apparatus for automatic movement of sliding windows in a motor vehicle, in particular a power-window apparatus, and corresponding device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110337523A CN110337523A (zh) | 2019-10-15 |
| CN110337523B true CN110337523B (zh) | 2021-11-26 |
Family
ID=59521316
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880012999.8A Active CN110337523B (zh) | 2017-03-01 | 2018-02-15 | 机动车辆中的滑动车窗的自动运动设备的防夹方法及装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11655661B2 (zh) |
| EP (1) | EP3590167A1 (zh) |
| CN (1) | CN110337523B (zh) |
| BR (1) | BR112019017906A2 (zh) |
| IT (1) | IT201700023222A1 (zh) |
| WO (1) | WO2018158647A1 (zh) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019108693A1 (de) * | 2019-04-03 | 2020-10-08 | Brose Fahrzeugteile Se & Co. Kommanditgesellschaft, Bamberg | Steuersystem für eine Verstellanordnung eines Verschlusselements eines Kraftfahrzeugs |
| EP3838639A1 (en) * | 2019-12-17 | 2021-06-23 | Inalfa Roof Systems Group B.V. | Open roof assembly for use in a vehicle and a method for operating same |
| CN111206838A (zh) * | 2020-02-26 | 2020-05-29 | 马瑞利汽车电子(广州)有限公司 | 一种纹波防夹位置补偿方法及装置 |
| CN111267592B (zh) * | 2020-03-19 | 2022-03-01 | 北京经纬恒润科技股份有限公司 | 一种汽车上闭合结构的关闭控制方法及装置 |
| CN111550144B (zh) * | 2020-04-29 | 2021-12-24 | 宁波芯路通讯科技有限公司 | 一种车窗防夹控制系统及方法 |
| WO2022246176A1 (en) * | 2021-05-20 | 2022-11-24 | Magna Seating Inc. | Motor position estimation using current ripples |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101929876A (zh) * | 2009-06-19 | 2010-12-29 | 法国阿文美驰轻型车系统有限公司 | 获得用于检测闭合开口的障碍物的指标的方法 |
| CN102362230A (zh) * | 2009-03-25 | 2012-02-22 | 欧陆汽车有限责任公司 | 用于控制驱动机构的具有响应延迟的控制件的方法和装置 |
| CN102414387A (zh) * | 2009-04-27 | 2012-04-11 | 欧陆汽车有限责任公司 | 用于检测夹紧情形的方法和设备 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6906487B2 (en) * | 2002-01-21 | 2005-06-14 | International Rectifier Corporation | Anti-pinch window drive circuit |
| US7372224B2 (en) * | 2005-09-30 | 2008-05-13 | The Chamberlain Group, Inc. | System and method for determining barrier motor parameters without using sensors |
| JP5385019B2 (ja) * | 2008-08-06 | 2014-01-08 | 株式会社日本自動車部品総合研究所 | 回転検出装置 |
| DE102009014264A1 (de) * | 2008-09-12 | 2010-04-15 | Brose Fahrzeugteile Gmbh & Co. Kommanditgesellschaft, Hallstadt | Verfahren und Vorrichtung zur Verarbeitung eines Stromrippel aufweisenden Motorsignals eines Gleichstrommotors |
| DE102011000871A1 (de) * | 2010-02-26 | 2011-11-10 | Denso Corporation | Rotationserfassungsvorrichtung und Rotationserfassungssystem |
| JP6258004B2 (ja) * | 2013-11-07 | 2018-01-10 | ローム株式会社 | モータ駆動回路およびその駆動方法、それを用いた電子機器 |
-
2017
- 2017-03-01 IT IT102017000023222A patent/IT201700023222A1/it unknown
-
2018
- 2018-02-15 US US16/481,780 patent/US11655661B2/en active Active
- 2018-02-15 WO PCT/IB2018/050929 patent/WO2018158647A1/en unknown
- 2018-02-15 BR BR112019017906-2A patent/BR112019017906A2/pt active Search and Examination
- 2018-02-15 CN CN201880012999.8A patent/CN110337523B/zh active Active
- 2018-02-15 EP EP18710519.2A patent/EP3590167A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102362230A (zh) * | 2009-03-25 | 2012-02-22 | 欧陆汽车有限责任公司 | 用于控制驱动机构的具有响应延迟的控制件的方法和装置 |
| CN102414387A (zh) * | 2009-04-27 | 2012-04-11 | 欧陆汽车有限责任公司 | 用于检测夹紧情形的方法和设备 |
| CN101929876A (zh) * | 2009-06-19 | 2010-12-29 | 法国阿文美驰轻型车系统有限公司 | 获得用于检测闭合开口的障碍物的指标的方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11655661B2 (en) | 2023-05-23 |
| EP3590167A1 (en) | 2020-01-08 |
| US20190390500A1 (en) | 2019-12-26 |
| BR112019017906A2 (pt) | 2020-05-12 |
| CN110337523A (zh) | 2019-10-15 |
| WO2018158647A1 (en) | 2018-09-07 |
| IT201700023222A1 (it) | 2018-09-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110337523B (zh) | 机动车辆中的滑动车窗的自动运动设备的防夹方法及装置 | |
| JP4487588B2 (ja) | 開閉体制御装置 | |
| US7346272B2 (en) | Anti-trap protection detection based on comparing the duty cycle of a PWM control system | |
| US10280676B2 (en) | Vehicle window lift control system and control method | |
| US6316892B1 (en) | Automatic door control system | |
| CN101046137B (zh) | 电动机控制装置及方法 | |
| US10122303B2 (en) | Motor control device | |
| US7908061B2 (en) | Opening/closing member control apparatus and method | |
| JP4896471B2 (ja) | 開閉部材制御装置および挟み込み検出方法 | |
| JP2005351042A (ja) | 開閉体制御装置 | |
| JP4818697B2 (ja) | 開閉部材制御装置 | |
| CN108350717B (zh) | 适于用于在机动车辆中自动移动滑动车窗的装置的防夹电路设备及相应的方法 | |
| KR20160098052A (ko) | 시스템의 장치에서 모터의 움직임을 감지 및 방지하기 위한 장치 및 방법 | |
| US20230017386A1 (en) | Electric motor furniture drive | |
| JPH07224576A (ja) | パワーウインドウ駆動制御装置 | |
| KR101686528B1 (ko) | 전자기계 조정 디바이스를 동작시키기 위한 디바이스 및 방법 | |
| WO2017203982A1 (ja) | 開閉体制御システム及び開閉体制御方法 | |
| JP3787186B2 (ja) | 車窓用開閉機構の挟まれ検出方法 | |
| WO2019208579A1 (ja) | 回転電機の負荷検出装置及び挟み込み検出装置 | |
| CZ283888B6 (cs) | Zařízení pro řízení motoru, zejména pro ovládání dveří například posuvných dveří výtahů | |
| JPH11241561A (ja) | 開閉部材の異物挟み込み検出装置 | |
| CN111817621B (zh) | 用于确定转子的运动的方法 | |
| JP6928156B2 (ja) | モータ制御装置およびドア開閉装置 | |
| JP4884856B2 (ja) | 開閉部材制御装置 | |
| JP2021130937A (ja) | スライドドア開閉装置、制御装置および制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |