CN108646937B - 用于确定触摸输入刺激的装置 - Google Patents
用于确定触摸输入刺激的装置 Download PDFInfo
- Publication number
- CN108646937B CN108646937B CN201810058790.7A CN201810058790A CN108646937B CN 108646937 B CN108646937 B CN 108646937B CN 201810058790 A CN201810058790 A CN 201810058790A CN 108646937 B CN108646937 B CN 108646937B
- Authority
- CN
- China
- Prior art keywords
- touch
- electrode
- electrodes
- stimulus
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




















































































































Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0412—Digitisers structurally integrated in a display
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/0416—Control or interface arrangements specially adapted for digitisers
- G06F3/0418—Control or interface arrangements specially adapted for digitisers for error correction or compensation, e.g. based on parallax, calibration or alignment
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/044—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means
- G06F3/0446—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means by capacitive means using a grid-like structure of electrodes in at least two directions, e.g. using row and column electrodes
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/041—Indexing scheme relating to G06F3/041 - G06F3/045
- G06F2203/04101—2.5D-digitiser, i.e. digitiser detecting the X/Y position of the input means, finger or stylus, also when it does not touch, but is proximate to the digitiser's interaction surface and also measures the distance of the input means within a short range in the Z direction, possibly with a separate measurement setup
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/041—Indexing scheme relating to G06F3/041 - G06F3/045
- G06F2203/04103—Manufacturing, i.e. details related to manufacturing processes specially suited for touch sensitive devices
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/041—Indexing scheme relating to G06F3/041 - G06F3/045
- G06F2203/04104—Multi-touch detection in digitiser, i.e. details about the simultaneous detection of a plurality of touching locations, e.g. multiple fingers or pen and finger
Abstract
用于检测刺激的电容传感器。电容传感器包括限定电容耦合的第一和第二电极以及电耦合到第一和第二电极以基于电容耦合的变化率来确定刺激的存在的处理单元。基片被定位成相邻于第一第二电极,其中刺激对应于抵靠基片的物体的放置。处理单元可操作来基于电容耦合的连续测量并响应于电容耦合大于预先确定阈值而确定时间变化率。
Description
技术领域
本发明涉及用于检测刺激的装置和方法,且更具体地涉及用于检测触摸输入和手写笔输入的装置和方法。
背景技术
现今存在设计成感测人触摸的存在的人机接口(HMI)设备。在一些情况下,这些HMI接口包括用于向机器接口提供来自人的输入的手写笔。手写笔可完全代替直接的人接口或可补充人接口。这些HMI设备可使用光、声、机电(开关)磁场、电场、电磁场或这些刺激的组合。
今天存在的以及使用电场的三个现有和当前触摸技术通常被称为投影式电容、电容式和差分感测。投影式电容通常与结合相同的大概尺寸的显示器使用的透明触摸屏相关,并与这样的显示器组装在一起以便允许来自显示器的光通过投影式电容触摸屏感测元件的感测元件。投影式电容通常被实现有高分辨率能力,其中触摸区域的选择可以比手指的实际尺寸小得多。投影式电容广泛用在个人电子设备例如蜂窝电话、个人数字助理(PDA)、智能电话、笔记本计算机、膝上型计算机、桌上型监视器和具有显示器的其它用户设备上。与投影式电容相反,电容感测通常被应用在处理通常响应于比投影式电容低得多的分辨率的单个输入的应用中,例如按钮或低分辨率滑块。这些较低分辨率输入感测应用使用被设计成对手指大小的输入做出响应的电极结构。然而,电容检测可代替投影式电容来使用,且在原理上投影式电容通常是电容的子集实现。差分感测技术使用电场、低阻抗感测技术和特有的感测电极,其结合特定的电子感测电路来允许对人触摸的准确、鲁棒的感测,而不使用软件。
电容、投影式电容和差分检测具有至少两个共同属性:1)它们都使用电场作为刺激用于测量人机交互,以及2)它们依赖于由工程师确定的预先确定阈值,该预先确定阈值对应于当特定刺激变化由于人机交互而出现时的触摸。
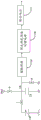
图1和2示出用于使用多电极和单电极电容感测的基本单输入传感器配置。图2示出具有用于通过电介质基片102进行感测的单个电极100的简单电容传感器。触摸刺激被插在单个电极100所位于的电介质102的相对侧上。图1示出具有电介质基片102和至少两个电极100、104的多电极电容传感器。类似于图2,触摸刺激将被插在多个电极100、104所位于的电介质102的相对侧上。与上面的图1和2中的结构有关的这些电容感测技术从单个或多个电极感测电容中的变化,使得在刺激信号被处理之后,将有当手指或手写笔接近感测电极时将改变的输出信号。输出信号被处理,使得当特定值(预先确定阈值)被达到时,触摸响应将出现。这个预先确定阈值将对应于位于触摸表面之上的触摸区内的触摸位置。被制造容差、介电常数、电介质厚度、电极面积和电子感测电路变化影响的变化将使在传感器电极之上的实际触摸位置也改变。
参考图3到7。图3示出如图2所示的单电极电容传感器的电气示意图和方框图,以及在图4到7中示出的时序图、用于利用单个电极来检测和处理触摸输入的基本技术。Ce代表在图2中示出的单电极感测元件的有效净电容。Ce将根据所存在的电容来改变,即,在“无触摸”的情况下Ce将具有比当“触摸”存在时低的电容值,在触摸存在时,Ce将具有更高的电容值。Cs代表模数转换器106、预先确定阈值电路108和输出响应110的采样电容器。控制设备A、B和C代表电子开关,其中当它们被接通时将在最小电阻模式(理想地,零欧姆)中以及当被断开时在高电阻模式(理想地,无限电阻)中。
图4、5、6和7是用于描述用于使用单个电极Ce感测触摸输出的感测技术的基本操作的时序图。图4示出控制设备A的控制信号的时序图。当控制信号在3.00的值处时,控制设备接通,且当控制信号在0.00的值处时,控制设备断开。同样的道理也适用于在图5和6中的控制设备B和C的控制信号。在图6中的时间t1,控制信号C变高,使控制设备接通,将Ce连接到Cs。也在时间t1,控制信号A和B如所示是低的,使控制设备A和B断开。在时间t2,控制设备A接通,释放存在于Ce和Cs上的任何电荷到地,如在图7中的从1.00的电压值下降到0.00的电压Vs所指示的。在时间t3,控制设备A断开。在时间t4,控制设备C断开,使Ce与Cs隔离。在时间t5,控制设备B接通,将采样电容器Cs充电到Vdd。图7示出从0.00的值充电到3.00的Vdd值的电压Vs。在时间t7,控制设备C接通,将Cs连接到Ce,使Cs上的电荷重新分布到Cs和Ce且因此电压Vs与Ce上的电容的量成比例地下降。Cs的电容是恒定的。较低的电压将根据下面的方程来下降:
Vs=Vdd*(Cs/(Cs+Ce))
在时间t7,在图7中示出1.00的“无触摸”值。如果存在触摸事件,则电容Ce将在比“无触摸”电容值高的值处。基于上面陈述的方程,Vs在图7中被示为.500的较低值。在时间t8,控制设备C断开,使传感器电容器Ce从采样电容器Cs分离。Vs的值将保持在与触摸条件成比例的采样值——“无触摸”条件的较高值和“触摸”条件的较低值——处。
在这里描述了利用多个电极的替代的电容检测技术。参考图1、8到12。图8示出如图1所示的多电极电容传感器的电气示意图和方框图以及在图9到12中示出的时序图、用于利用多个电极来检测和处理触摸输入的基本技术。Ce代表在图1中示出的多(双)电极感测元件的有效净电容。Ce将根据所存在的电容来改变,即,在“无触摸”的情况下Ce将较高的电容值,在触摸存在时,Ce将具有较低的电容值。Cs代表模数转换器的采样电容器。控制设备A和C代表电子开关,其中当它们被接通时将在最小电阻模式(理想地,零欧姆)中以及当被断开时在高电阻模式(理想地,无限电阻)中。控制设备B被表示为用于在控制设备B的输出上产生驱动信号的MOSFET电路。图9、10、11和12是用于描述用于使用多电极电容传感器Ce来感测触摸输出的感测技术的基本操作的时序图。图11示出控制设备C的控制信号的时序图。当控制信号在3.00的值处时,控制设备接通,且当控制信号在0.00的值处时,控制设备断开。同样的道理也适用于在图9中的控制设备A的控制信号。图10示出从0.00的值改变到3.00的值的输出驱动信号B的时序图。
在图11中的时间t1,控制信号C变高,引起控制设备C接通,将Ce连接到Cs。也在时间t1,控制信号A是低的,使控制设备A断开,且输出B是低的,这两个状态分别在图11和10中示出。在时间t2,控制设备A接通,将可能存储在Ce和Cs上的任何电荷释放到地,如在图12中的从1.00的电压值下降到0.00的电压Vs所指示的。在时间t3,控制设备A断开。在时间t4,输出设备B接通,使施加到传感器电极结构的电压从0.00的值改变到3.00。电压刺激将使Vs的值上升到与Ce的电容成比例的值,如由对于“无触摸”条件从0.00上升到1.00的值的电压所示的。如果手指/附件或其它触摸输入设备接近或接触触摸表面,则Ce的电容将在“触摸条件”的较低有效电容处,使在Vs处的电压稳定在如在“触摸条件”处的.500的值所指示的较低值处。这两个条件都在图12中示出。在时间t5,控制设备C断开,使Ce与Cs隔离。在时间t6,控制设备B变低,将刺激从电极结构Ce移除。Cs的电容是恒定的。较低的电压将根据下面的方程来下降:
Vs=Vdd*(Cs/(Cs+Ce))
在时间t6,在图12中示出1.00的“无触摸”值。如果存在触摸事件,则电容Ce将在比“无触摸”电容值高的值处。基于上面陈述的方程,Vs在图12中被示为.500的较低值,使电容器Ce从采样电容器Cs断开。Vs的值将保持在与触摸条件成比例的采样值——“无触摸”条件的较高值和“触摸”条件的较低值——处。这个双电极感测技术的一个有用的属性是,如果水落在触摸传感器结构的触摸表面上,则Ce本质上在值上变高,然后使Vs在值上增加。这是有用的,因为与正常触摸事件比较,Vs在水的相反的方向上移动。这个信息在内在地区分开由于水落在触摸表面上所致的错误触摸事件中非常有用。
在上面的两种情况中,不管单个电极还是两个电极,模数转换器106都将Vs的值转换成可由预先确定阈值处理电路108处理的数字值。将如何确定预先确定阈值的两个示例可以是:1)预先确定阈值等于一电压值,其中当Vs等于或小于相同的所述电压值时,则存在有效触摸事件,即,当V(采样)<=Vp(预先确定阈值)时,有效触摸事件存在,或2)预先确定阈值等于一电压值,其中当在“无触摸”Vs值和Vs之间的差异等于或大于同一所述电压值时,则存在有效触摸事件,即,当[(“无触摸”电压的值)–(Vs)]>=V(预先确定阈值)时,有效触摸事件存在。阈值处理电路108将采用Vs的数字表示,且阈值处理电路108将接着使用与上面描述的处理类似的预先确定阈值处理,来处理并决定是否存在将由用于与外部世界正确地通过接口连接的输出响应电路110处理的有效触摸事件。预先确定阈值必须由电容或场效应传感器的应用的设计者确定。预先确定阈值是最终与采样值比较的值,采样值与然后被解释为触摸事件的触摸刺激成比例。存在已经开发的使用利用预先确定阈值的这种方法的很多技术。甚至使用多个感测电极的差分感测技术也要求在一组电极上感测的值具有相对于其它组电极的特定值,例如作为示例在差分双电极感测结构中,两个电极都需要等于彼此,以便对应有触摸事件,且电极之一可能需要小于另一个以对应没有触摸事件(逻辑上无触摸)。不论技术如何,当使用预先确定阈值技术时,除了“无触摸”或“触摸”事件之外,存在可最终影响在图7和12中的采样电压例如Vs的值的其它变量。触摸基片的介电常数的变化、传感器板面积的有效变化、耦合到传感器结构的手指的面积的变化、基于玻璃基片的容差的变化、采样电路中的变化、温度、湿气等都可导致错误或欠/过敏感的触摸感测响应。图1和2示出在触摸表面上的对应于预先确定阈值的位置,例如以考虑可影响触摸敏感度或“触摸感觉”的其它因素的变化性。如果设计者必须考虑在手指/附件或其它触摸输入设备上的手套的使用,则在触摸表面上的将对应于预先确定阈值的位置将必须是较大的距离以适应手套绝缘的厚度。当然,当手指/附件或其它触摸输入设备将要接近触摸表面时,即使手指/附件或其它触摸输入设备实际上不接触触摸表面,预先确定阈值处理电路108也将登记有效触摸事件。预先确定阈值的对应位置可能就在触摸表面处。在这种情况下,设计者将考虑由于手指/附件在最初接触触摸表面之后变平而引起的信号贡献的量。当手指到玻璃的电容耦合增加时,刺激信号继续增加,这将使图3中的电容Ce增加以及图8中的电容Ce降低。设计者必须考虑影响预先确定阈值应是什么的所有变量。非常重要的是,在考虑所有这些变量之后,预先确定阈值不被设置到这样的值,使得当手指/附件或其它触摸输入设备被带到触摸表面时,将没有有效触摸事件被识别出。相反,预先确定阈值不应被设置为引起错误致动。所有上述变量——包括环境条件——需要被考虑以确定用于设置预先确定阈值的正确折衷。
发明内容
提供了一种电容传感器。在一个实施例中,电容传感器包括限定电容耦合的第一和第二电极以及电耦合到第一和第二电极以基于电容耦合的变化率来确定刺激的存在的处理单元。处理单元操作用于响应于电容耦合大于预先确定阈值而确定时间变化率。基片被定位成相邻于第一和第二电极,其中刺激对应于抵靠基片的物体的放置。
在另一实施例中,电容传感器包括内电极和外电极。内电极和外电极实质上是共面的,且外电极实质上包围内电极,与内电极间隔开。内电极可选地限定间隔开的片段,且外电极可选地插在内电极的间隔开的片段之间。处理单元操作用于响应于刺激(例如接近电容传感器的物体)而确定在内电极和外电极之间的电容耦合的变化率。
在又一实施例中,电容传感器包括用于将第一和第二共面电极在其上支持的刚性基片,并包括通过多个隔板在第一和第二电极上支持的柔性基片。柔性基片响应于在远离第一和第二电极的柔性基片的一部分上的触摸输入向下朝着内电极和外电极是柔性的。处理单元可操作用于响应于抵靠柔性基片的触摸输入而确定在第一和第二电极之间的电容耦合的变化率。
在又一实施例中,电容传感器包括与第一和第二电极间隔开的选通电极(strobeelectrode)。选通电极通常是平面的,并与第一和第二电极共同延伸以分别限定第一和第二电容耦合。刚性基片插在选通电极与第一和第二电极之间。处理单元可操作用于可选地响应于第一和第二电容耦合超过预先确定阈值而确定第一和第二电容耦合的变化率以指示触摸输入。
在甚至另一实施例中,电容传感器包括在第一方向上延伸的多个电极行和在横切第一方向的第二方向上延伸的多个电极列。多个电极行和多个电极列在实质上不重叠的对齐中。在其它实施例中,电极列与电极行的重叠对齐。处理单元可操作用于确定多个电极行的电容的变化率和多个电极列的电容的变化率以指示在二维中的刺激的存在。相邻电极行可选地形成电容耦合,其中处理单元进一步适合于测量电容耦合的变化率。此外,相邻电极列可选地形成电容耦合,其中处理单元进一步适合于测量电容耦合的变化率。
从本发明的下面的描述中,当根据附图和所附权利要求看时,本发明的这些和其它特征和优点将变得明显。
在详细解释本发明的实施例之前,应理解,本发明不限于在下面的描述中阐述的或在附图中示出的操作的细节或部件的构造和布置的细节。本发明可在各种其它实施例中实现,并以未在本文明确公开的可选方式来实践或执行。此外,应理解,本文使用的短语和术语是为了描述的目的,且不应被视为限制性的。“包括(including)”和“包含(comprising)”及其变形的使用意味着包括在其后列出的项和其等效形式以及其额外的项和等效形式。此外,在各种实施例的描述中可使用列举。除非另有明确规定,列举的使用不应被解释为将本发明限制到部件的任何特定的顺序或数量。列举的使用也不应被解释为从本发明的范围排除可与所列举的步骤或部件组合或组合到所列举的步骤或部件组合中的任何额外的步骤或部件。
附图说明
图1是用于差分感测技术的包括多个电极的触摸传感器的图示;
图2是用于电容感测技术的包括单个电极的触摸传感器的图示;
图3是对应于图2所示的单电极触摸传感器的电路图;
图4是图3的电路的第一时序图;
图5是图3的电路的第二时序图;
图6是图3的电路的第三时序图;
图7是图3的电路的第四时序图;
图8是对应于图1所示的多电极触摸传感器的电路图;
图9是图8的电路的第一时序图;
图10是图8的电路的第二时序图;
图11是图8的电路的第三时序图;
图12是图8的电路的第四时序图;
图13是用于确定与单个电极的接近度的包括有效区的触摸传感器的图示;
图14是用于时域差分感测的包括多个电极的触摸传感器的图示;
图15是用于时域差分感测的包括单个电极的触摸传感器的图示;
图16是接近包括单个电极和激活区的触摸传感器的手指的图示;
图17是示出图16所示的触摸传感器的电压与时间的关系的第一曲线;
图18是示出图16所示的触摸传感器的电压与时间的关系的第二曲线;
图19是示出图16所示的触摸传感器的电压与时间的关系的第三曲线;
图20是示出图16所示的触摸传感器的操作的流程图;
图21是示出图16所示的触摸传感器的定时接口电路的方框图;
图22是用于确定刺激(S)是否大于接近度阈值(X)的包括有效区的触摸传感器;
图23是包括多个电极和时域差分感测电路的触摸传感器的电路图;
图24是示出图23所示的触摸传感器的刺激与时间的关系的曲线;
图25是示出图23所示的触摸传感器的刺激的变化率与时间的关系的曲线;
图26是包括四个电极和时域差分特征处理电路的触摸传感器的电路图;
图27是用在图26所示的触摸传感器上的四个圆形电极的描绘;
图28是用在图27所描绘的四个圆形电极和图26所示的触摸传感器上的接地平面的描绘;
图29是停留在包括单个电极的触摸传感器上的手指的第一图示;
图30是停留在包括单个电极的触摸传感器上的手指的第二图示;
图31是示出图26所示的触摸传感器的刺激与时间的关系的曲线;
图32是示出图26所示的触摸传感器的刺激的变化率与时间的关系的曲线;
图33是用在图26所示的触摸传感器上的四个非圆形电极的描绘;
图34是用在图33所描绘的四个非圆形电极和图26所示的触摸传感器上的接地平面的描绘;
图35是包括用在时域差分逻辑上的多个电极和有效区的触摸传感器的图示;
图36是包括时域差分处理电路的多电极触摸传感器的电路图;
图37是包括八个单或双电极和时域差分处理电路的触摸传感器的电路图;
图38是用在图37所示的触摸传感器上的八个单电极的描绘;
图39是用在图37所示的触摸传感器上的八个双电极的描绘;
图40是用在图37所示的触摸传感器上的十二个双电极的描绘;
图41是包括插在柔性基片和刚性基片之间的单电极的触摸传感器的图示;
图42是接近图41所示的触摸传感器的手指的图示;
图43是使与图41所示的触摸传感器相关的柔性基片偏斜的手指的图示;
图44是示出图41-43所示的触摸传感器的刺激与时间的关系的曲线;
图45是示出图41-43所示的触摸传感器的刺激的变化率与时间的关系的曲线;
图46是包括插在两个刚性基片之间的单个电极的触摸传感器的图示;
图47是接近图46所示的触摸传感器的手指的图示;
图48是包括传感器电极和插在上和下刚性基片之间的偏置电极的触摸传感器的图示;
图49是包括插在上和下刚性基片之间的多个电极的触摸传感器的图示;
图50是包括多个电极和插在上和下刚性基片之间的偏置电极的触摸传感器的图示;
图51是示出图49-50的触摸传感器的刺激与时间的关系的第一曲线;
图52是示出图49-50的触摸传感器的刺激的变化率与时间的关系的第一曲线;
图53是示出图49-50的触摸传感器的刺激与时间的关系的第二曲线;
图54是示出图49-50的触摸传感器的刺激的变化率与时间的关系的第二曲线;
图55是示出图49-50的触摸传感器的刺激与时间的关系的第三曲线;
图56是示出图49-50的触摸传感器的刺激的变化率与时间的关系的第三曲线;
图57是示出图49-50的触摸传感器的刺激与时间的关系的第四曲线;
图58是示出图49-50的触摸传感器的刺激的变化率与时间的关系的第四曲线;
图59包括包含滤波功能和时域差分特征识别的单电极触摸传感器的电路图;
图60包括包含滤波功能和时域差分特征识别的多电极触摸传感器的电路图;
图61示出包括内电极和外电极的双电极触摸传感器;
图62示出包括净电场的图61的双电极触摸传感器;
图63包括图61所示的双电极触摸传感器的第一电路图;
图64包括图61所示的双电极触摸传感器的第二电路图;
图65示出包括间隔开的上和下刚性基片的双电极触摸传感器;
图66示出包括间隔开的上和下刚性基片和偏置下电极的双电极触摸传感器;
图67是使用本发明的差分感测技术的八电极触摸传感器;
图68是使用本发明的差分感测技术的十二电极触摸传感器;
图69示出包括内电极和外电极以及选通电极的触摸传感器;
图70是图69所示的并包括时间差分处理电路的触摸传感器的电路图;
图71是图69所示的并包括内部缓冲器及第一和第二刺激和检测电路的触摸传感器的电路图;
图72示出包括净电场的图69的触摸传感器;
图73示出包括由隔板支持的上覆基片的图69的触摸传感器;
图74示出包括净电场的图73的触摸传感器;
图75示出包括内电极和外电极的第一的十二电极传感器;
图76示出用在图75的十二电极传感器上的下选通电极;
图77示出包括内电极和外电极的第二的十二电极传感器;
图78示出用在图77的十二电极传感器上的下选通电极;
图79是包括重叠的电极行和电极列的触摸传感器的第一侧视图;
图80是包括重叠的电极行和电极列的触摸传感器的第二侧视图;
图81是包括电极列的图79-80的触摸传感器的顶视图;
图82是包括电极行的图79-80的触摸传感器的顶视图;
图83是包括电极列和电极行的图79-80的触摸传感器的顶视图;
图84是包括时域差分特征处理电路的图83的触摸传感器的电路图;
图85是描绘根据本发明的实施例的被驱动和读取的列的图83的触摸传感器的顶视图;
图86是描绘根据本发明的实施例的被驱动和读取的行的图83的触摸传感器的顶视图;
图87是描绘根据本发明的实施例的被驱动和读取的列和行的图83的触摸传感器的顶视图;
图88是描绘根据本发明的实施例的被驱动和读取的多个列的图83的触摸传感器的顶视图;
图89是描绘根据本发明的实施例的被驱动和读取的多个行的图83的触摸传感器的顶视图;
图90是描绘根据本发明的实施例的被驱动和读取的多个列和行的图83的触摸传感器的顶视图;
图91是示出根据本发明的实施例的图83的触摸传感器的操作的第一流程图;
图92是从图91的流程图继续的流程图;
图93是示出根据本发明的实施例的图83的触摸传感器的操作的第二流程图;
图94是从图93的流程图继续的流程图;
图95是包括滤波功能和时域差分特征处理电路的图83的触摸传感器的电路图;
图96是示出净电场的图83的触摸传感器的第一侧视图;
图97是示出净电场的图83的触摸传感器的第二侧视图;
图98是适合于选通列电极和读取行电极的电路的电路图;
图99是图98的电路图,其被修改以包括刺激选择电路来将来自行或列的响应按规定路线发送到响应检测电路;
图100是描绘单行的选通和两列的读取的图83的触摸传感器的顶视图;
图101是描绘单列的选通和两行的读取的图83的触摸传感器的顶视图;
图102是描绘多行的选通和多列的读取和反之亦然的图83的触摸传感器的顶视图;
图103是包括耦合到相邻电极行的电极列的触摸传感器的侧视图;
图104是包括耦合到相邻电极列的电极行的触摸传感器的侧视图;
图105是包括时域差分处理电路的图103-104的触摸传感器的电路图;
图106是图105的电路图,其被修改以包括刺激选择电路来将来自行或列的响应按规定路线发送到两个检测电路之一;
图107是描绘单列的选通和两行的读取的图103-104的触摸传感器的顶视图;
图108是描绘单行的选通和多列的读取的图103-104的触摸传感器的顶视图;
图109是描绘多行的选通和多列的读取和反之亦然的图103-104的触摸传感器的顶视图;
图110是包括电极列和电极行的触摸传感器的第一侧视图;
图111是被修改以包括柔性基片的图110的触摸传感器;
图112是包括电极列和电极行的触摸传感器的第二侧视图;
图113是被修改以包括柔性基片的图112的触摸传感器;
图114是包括电极列和电极行并示出净电场的触摸传感器的第一侧视图;
图115是包括电极列和电极行并示出净电场的触摸传感器的第二侧视图;
图116是包括电极列、电极行和偏置电极的触摸传感器的第一侧视图;
图117是示出净电场的图116的触摸传感器;
图118是包括电极列、电极行和偏置电极的触摸传感器的第二侧视图;
图119是示出净电场的图118的触摸传感器;
图120示出抵靠图116-119的触摸传感器停留的手指;
图121示出抵靠图116-119的触摸传感器停留的手写笔;
图122示出在触摸输入不存在时包括多个电极列的触摸传感器的净电场;
图123示出在触摸输入不存在时包括多个电极列和多个电极行的触摸传感器的净电场;
图124示出在触摸输入不存在时包括多个电极行的触摸传感器的净电场;
图125示出从第一侧视图看包括多个电极列和多个电极行的触摸传感器的净电场;
图126示出被手写笔接触的图123和125的触摸传感器;
图127示出被手写笔向下偏斜的图123和125的触摸传感器;
图128示出被手指接触的图123和125的触摸传感器;
图129示出被手指向下偏斜的图123和125的触摸传感器;
图130示出根据本发明的实施例的光传感器阵列以确定在触摸板上的物体的位置;
图131示出根据本发明的实施例的光传感器矩阵以确定在触摸传感器上的物体的位置;以及
图132示出在三维中相对于图131的触摸传感器的手指尖的位置。
具体实施方式
如在本文设想和公开的发明包括用于检测一个或多个触摸输入的系统和方法。系统和方法包括监测电容的变化率以确定何时物体抵靠基片停留。部分I包括时域差分感测技术的概述。部分II涉及使用时域差分感测技术的单电极和多电极触摸传感器。部分III涉及使用时域差分感测技术的矩阵电极触摸传感器。最后,部分IV涉及可选地结合在部分II-III中讨论的触摸传感器使用的光传感器中的时域差分感测。
I.时域差分感测的概述
2010年3月24日提交的Caldwell等人的国际专利申请WO2010/111362(其公开本文通过引用被全部并入)描述了与投影式电容、电容式和差分检测相关的很多缺点和限制以及用于克服这样的缺点和限制的技术。这些技术当被正确地应用时可产生比从只基于预先确定阈值的现有电容和场效应感测技术实现的性能和额外特征更大的性能和额外特征的机会。
特别是,国际专利申请WO2010/111362描述了使用单个电极和“时域差分”感测技术以通过实际上感测“触摸的特征”来实现更可靠的触摸感测。时域差分感测技术可最初使用与对检测图3中的触摸信号Vs(且就此而言,当使用多电极传感器时图8中的Vs)描述的相同的技术。人的触摸的基本描述是当它朝着给定单电极上的表面移动时,该表面使手指停止并因此在物理上限制手指接近感测电极且因此限制可由感测电极感测的刺激的量。由人手指引起的触摸事件的特征然后首先通过确定手指是否通过接近图13所示的有效区来在感测电极附近来限定,其中刺激(s)将大于x的宽松设置的值。一旦确定手指在感测电极的附近内并在有效区内,如s>x所指示的,则确定和分析刺激相对于时间的变化率(ds/dt)。刺激的变化率被描述为相对于时间的由于人手指接近在相应的感测电极或多个感测电极之上的触摸表面/仪表板而引起的刺激变化。
存在用于产生并感测在检测如早些时候描述的触摸中使用的刺激的很多技术,包括涉及单个电极的自电容技术和涉及两个或多个电极的互电容技术。即使根据当触摸输入接近触摸表面时用于基于触摸输入来产生刺激并检测刺激的技术可使刺激增加或减小,让我们假设当手指或其它附件/设备接近触摸表面界面时刺激增加(这可基于感测技术自然地发生,或可通过反转来格式化,等等),而不管是单还是多电极传感器。因此,使用模拟/数字硬件或软件或两者的组合处理的触摸特征的基本限定将由以下事件的基本逻辑序列规定:1)如果基于极接近感测电极的手指/附件或其它触摸输入设备,刺激(s)改变并被检测到大于特定值(s>x),后面是:2)基于手指朝着触摸感测电极移动,相对于时间的刺激变化率(ds/dt)大于零(ds/dt>0),后面是:3)相对于时间的刺激变化率由停留在感测电极之上被表面仪表板停止的手指引起(ds/dt=0或相对于当手指移动时的ds/dt非常接近于0),则如果条件使得事件1为真且事件2为真以及事件3为真,则过程将指示存在触摸刺激。
应注意,没有对评估触摸的过程预先确定的绝对值。因此作为示例,如果手套被戴在手指上,增加厚的额外层防止手指实际上接触触摸表面并本质上增加距离(该距离通常基于手套的厚度),则只要刺激在感测电极上的附近(s>x,其是上面的条件1)内且当上面的条件2)和3)被满足时,则触摸将被检测到,就像当无手套的手指/附件被使用一样。实现上述逻辑条件导致使用戴手套和不戴手套的条件的触摸的一致触摸“感觉”感测。此外如果基片电介质、基片厚度或其它制造容差使有效刺激强度变化,则与使用如在常规电容和差分感测方法(这两者都使用对应于刺激响应和触摸信号响应的预先确定阈值)中使用的预先确定阈值比较,使用上述逻辑序列来检测触摸输入将允许触摸响应的一致“感觉”。
II.单电极和多电极触摸传感器
可使用单和多电极触摸传感器来实现时域差分感测技术。这些技术可用于基于s、ds、S、dS、t、dt、T、dT、ds/dt、ds/dT、dS/dt、dS/dT使用单个电极或多个电极来确定触摸特征,其中s(或S,其中s<<S)表示电极电容的绝对值,且t和T是时域,其中t<<T。这些技术也可用于使用两个电极确定触摸特征。图14示出多电极感测结构,且图13和15示出单电极结构。不考虑感测技术如何,可根据上面描述的原理来分析对手指/附件或其它触摸输入设备接近触摸表面的刺激响应。图16是来自国际专利申请WO2010/111362的附图,其示出以手指的形式的触摸输入(当它接近单个电极时),且图17示出刺激以及当刺激对应于接近单个单极的手指时刺激的变化率。在图17中的响应也可示出多电极传感器和检测电路的响应。同样,图18、19、20和21可应用于多电极响应。
再次参考图13。假设当手指接近基片顶表面112时触摸增加的刺激感测方法。当人手指接近在单个电极100或多个电极100、104之上的指定触摸表面112时,用于检测触摸的逻辑由基于接近度和刺激相对于时间的变化率的事件的序列限定。这个限定被实现来模拟与简单开关相同的响应,但应用于触摸感测。实际上,触摸的特征可被重新限定。例如,简单的示例将是在添加新条件的情况下在上面限定的特征,其中第四条件需要跟随有负ds/dt。如果前三个序列被满足,则条件ds/dt<0将是终止条件(手指有时需要被移除,这将导致ds/dt<0)。
假设当手指朝着触摸表面112移动时s增加且s代表触摸刺激,则对于“常规触摸”,用于处理触摸的序列将如上所述那样:
1)如果s>x(接近度阈值)
以及
2)ds/dt>0,后面是
3)ds/dt=0,则
4)触摸被检测到
要求添加ds/dt<0的新条件用于将被检测到的触摸,我们将该触摸称为“释放时触摸(touch on release)”,于是下面的序列将如下:
1)如果s>x(接近度阈值)
以及
2)ds/dt>0,后面是
3)ds/dt=0,后面是
4)ds/dt>0,则
5)触摸被检测到
上面的第一步骤可能不是需要的,取决于刺激检测技术。在上面描述的条件逻辑序列中,第一步骤用作触摸的识别的看门人。使用较不鲁棒的感测技术,以便使步骤2到5完成,刺激需要满足有效的信号强度的水平。这消除了可能不是有效的触摸刺激的信号和噪声的处理。可使用其它手段来辨别有效的刺激强度和存在。一个示例将是多电极结构和用于差分感测的相关刺激感测技术的使用,这些刺激感测技术倾向于减小或抑制共模噪声。消除或减小噪声特征可允许消除在上面描述的两个逻辑序列中的步骤1。
注意,无论是使用单还是多电极板设计,通过只改变触摸特征的限定(通过添加步骤条件4),触摸响应将是不同的。也注意,添加上面的步骤4并不涉及改变预先确定阈值。也注意,用于确定触摸响应的逻辑内在地嵌在触摸检测的限定中。在现有电容、投影式电容和差分感测技术中,第一响应将是s>x作为触摸响应的检测,而不考虑ds/dt和有关序列。在触摸响应取决于预先确定阈值的情况下,结果将被认为是接近效应,其是在上述示例中的第一步骤。作为对感测的影响的示例,一旦s>x特别是对于“常规触摸”,裸手指和戴手套的手指将同等地起反应。使用常规电容、投影式电容和差分感测技术的“释放时触摸”将通过将额外的步骤添加到“s>0”步骤来实现,其中由手指插入的刺激将下降到特定值之下(s<x2或s<x)。当然,类似于当s>x时的条件,当在任一情况中手指从传感器表面移动时,关于与戴手套的手指比较的裸手指,使用常规电容、投影式电容和差分感测技术的“释放时触摸”具有类似响应。电容、投影式电容和差分感测技术的比较序列可看起来如下。
假设当手指朝着触摸表面移动时s增加且s代表触摸刺激,则对于使用常规电容、投影式电容和差分感测技术的“常规触摸”将如上所述那样:
1)如果s>x(接近度阈值),则
2)触摸被检测到。
需要添加s<x的新条件用于将使用常规电容、投影式电容和差分感测技术来检测到的触摸(我们可将此称为“释放时触摸”),于是下面的序列将如下:
6)如果s>x(接近度阈值),后面是
7)s<x(or x2),则
8)触摸被检测到
再次注意,在上面描述的序列中,没有取决于ds/dt的使用的条件。
与常规电容系统比较的时域差分检测的一个潜在的额外差别是,与常规电容比较,时域差分可使用较快的采样率。电容测量技术并不内在地取决于时间。只要刺激超过预先确定阈值水平(s>x)且感测接口能够测量刺激中的这个变化,则在原则上接口就需要只简单地采用两个样本。作为示例,对于触摸系统将即时做出响应的对用户的感觉,触摸接口系统将需要在大约30毫秒做出响应。基于采样定理,系统必须以所需的响应的频率的两倍来采样,这将意味着感测接口必须在15毫秒内对触摸刺激做出响应。常规电容系统必须测量刺激或刺激的变化,比较刺激或刺激的变化(因此s=刺激或刺激的变化)与阈值(s>x,假设当手指朝着触摸表面移动时s增加),如果与x的这个比较在15毫秒内是真的,则响应在15毫秒内只需要一个样本且在30毫秒内需要至多2个样本。这在各种方式中是相当可行的。
在比较中,时域差分感测技术使用在15ms的相同时域中的多个测量来按需要计算ds/dt值的数量以分析限定触摸检测的正确序列。时域差分感测可能需要在同一时域(30毫秒,见图18)中测量刺激s很多次,以便捕获条件ds/dt>0、ds/dt=0、ds/dt>0等。因此时域差分将一般——虽然不是总是——使用较高的采样率。与一般电容触摸传感器比较,这个额外的处理速度可能需要额外的电子电路或在微处理器中的更大的处理速度或这两者。再次,时域差分感测不取决于精确预先确定阈值来检测触摸,并依赖于ds/dt的估计作为用于确定触摸是否存在的决定过程的部分,与主要对预先确定阈值做出其决定的电容或差分不同。
时域差分检测技术最初测量与电容、投影式电容和差分检测技术相同的参数,包括时间。通过使用时域差分检测技术和可用的其它参数(例如s和时间),否则在使用常规电容感测接口时是不可用的新感测特征变成可用的。当时域差分接口确定是否存在触摸并且然后使用这些参数时,这些其它参数变得非常有用。在触摸被检测到之后,当时域差分界面可估计s和时间的值时,感兴趣的可能性产生。利用时域差分接口,在单个触摸表面之上的多个触摸点或手势的可能性变得可能。作为示例,如果下面的序列被允许通过改变触摸输入的物理结构来满足,则可能有至少两个触摸条件:
1)如果s>x(接近度阈值)
以及
2)ds/dt>0,后面是
3)ds/dt=0,则
5)触摸#1
以及如果后面是
6)ds/dt>0,后面是
7)ds/dt=0,则
8)触摸#2被检测到
图13示出具有有效区的基本单电极触摸传感器,其中可应用基本时域差分逻辑,其中简单开关功能可被代替。图23示出触摸检测电路,其与图3中的检测电路相同,例外是预先确定阈值处理电路108用具有检测元件Cs、Ce、控制设备A、B、C和模数转换器106的时域差分处理电路114来代替,其中所述模数转换器的输出被称为刺激(S)并被输出到时域差分处理电路114。时域差分处理电路114可以是模拟的、数字的或软件处理的,可选地实质上如在国际专利申请WO2010/111362中阐述的。图24和25是S和dS/dt的时序图,因为它们与时域差分处理序列有关。假设当触摸刺激被施加时(即,当手指/附件或其它触摸输入设备接近触摸表面时),值刺激(S)被格式化以在值上增大。当手指/附件刺激远离触摸表面时,在t0的刺激(S)被表示为在“无触摸”条件下的1.00的基本水平。在t0的S相对于时间的变化率(dS/dt)被表示为在上面描述的相同“无触摸”条件下的3.00的基本水平。在时间t1,刺激S被检测为增大。在时间t1,dS/dt被检测为与S相对于时间的变化率成比例的值,该值在这种情况下是4.00的值。5.00的HI ds/dt参考值和1.00的LO ds/dt参考值用作滤波器。如果触摸输入刺激被其它因素例如电噪声(比触摸刺激将有的激励快得多)或温度(比触摸刺激将有的激励慢得多)影响,则处理电路(其可在硬件中实现或在软件中处理或这两者的组合)可基于触摸特征的响应时间区分开不能是触摸的这些其它因素。作为示例,如果电噪声使刺激以不能是触摸输入的速率增加,则处理电路将通过产生正的高dS/dt或负高dS/dt值来检测此,这两个值都指示人可能不可能实现的刺激插入或提取的速率。在这种情况下,处理电路或软件可忽略、减小、插值dS/dt和/或S。在所有情况下,处理电路将不错误地指示触摸条件。类似地,如果刺激插入S的变化率太慢,则处理和/或软件将忽略、减小、插值dS/dt和/或S。如果手指以比手指将正常接近触摸表面时慢得多的速率接近或如果温度引起甚至更慢的速率的刺激变化,则处理电路和/或软件逻辑将忽略、减小、外推dS/dt和/或S。在这两种情况中,触摸处理电路将不导致有效触摸输入的解释。
再次参考图24和25,可容易看到有效触摸可用的信息。在时间t0,刺激S在对应于无刺激的1.00的基本值处。而且在时间t0处,dS/dt在对应于刺激S相对于时间t无变化率的3.00的基本值处。在时间t1,刺激S开始如图24所示的那样增大,且同时刺激S相对于时间t的变化率(dS/dt)是4.00的值(1.00的速率dS/dt加到3.00的基本值,这将产生4.00的净值)。刺激继续增大,直到手指/附件在时间t3与表面接触为止,停止该方法和因此停止刺激插入。如果手指/附件在接触触摸表面时立即开始远离接触表面移动,则刺激S的量将开始减小。因此同时在时间t3,dS/dt将立即转变到负值。这被示为2.00的值(-1.00的变化率加到3.00的基本值,这将产生2.00的净值)。当手指/附件更远离触摸表面(且因此更远离传感器电极)移动时,刺激S将继续减小,直到手指/附件足够远离传感器电极使得S=3.00的“无条件”和dS/dt=3.00的“无条件”在时间t5被满足为止。如果在时间t3,手指/附件停留在表面上,则刺激S的值将停留在3.00,但在时间t3的dS/dt值将转变为零。当然,从时间t1到时间t3,刺激S将超过在时间t1和时间t2之间的1.50的有效区设定点。简单触摸的逻辑可因此是:
1)如果S>x(1.50)(有效区设定点=x(1.50))
以及
2)dS/dt>+Lo dS/dt(3.50)和dS/dt<+Hi dS/dt(4.50),后面是
3)ds/dt<=0,则
4)触摸被检测到(因此在时间t3)
这的有效结果将是,在触摸被考虑为有效的之前,手指/附件将必须简单地接触触摸表面(无论是否戴手套等)。可选地,对于简单的触摸,有效触摸的逻辑可以是:
1)如果S>x(1.50)(有效区设定点=x(1.50))
以及
2)dS/dt>+Lo dS/dt(3.50)和dS/dt<+Hi dS/dt(4.50),后面是
3)S<x(1.50),则
4)触摸被检测到(因此在时间t4.5)
这的有效结果将是,在触摸将被考虑为有效的之前,手指/附件必须被拉得足够远以在有效区之外。而且有效触摸逻辑的另一替代形式可以是:
1)如果S>x(1.50)(有效区设定点=x(1.50))
以及
2)dS/dt>+Lo dS/dt(3.50)和dS/dt<+Hi dS/dt(4.50),后面是
3)ds/dt<=x(1.50),则
4)触摸被检测到(因此在时间t4.5)
这的有效结果将是,必须远离接触表面拉开手指/附件以被考虑为有效的。
参考图26、27和28。图26将测量单个单传感器的概念扩展到多个单传感器。在图26中示出的是被描绘为Ce1、Ce2、Ce3和Ce4的总共四个单传感器,每一个单传感器具有用于将每一个单传感器连接到采样电容器Cs的控制设备(控制设备1、2、3和4)。每一个传感器的序列与上面描述的相同,以其它方式。图27和28示出与图26所示的处理电路一起工作的四个传感器布局。可选的电介质层可插在图27的电极100和图28的接地平面之间。
可通过改变限定和可能电极结构,使用时域差分触摸感测的技术来实施其它特征。参考图26、29、30、31和32。图29-30描绘类似于已描述的单电极传感器的单电极传感器和接近接触表面(手指可以是另一附件或触摸输入设备)并将要停留在接触表面处的手指。这个序列由图26中的检测和处理电路检测,且刺激(S)和dS/dt在图31和32上从时间t1到t3示出并表示简单触摸的序列。如果在时间t2手指将被“滚动”例如使手指变平,引起从手指到触摸基片的底表面上的传感器电极的耦合的更多表面积,则刺激S将继续增加到更高的水平以及当手指移动时引起dS/dt中的跳跃。在移动之后,手指再次停留。从t3到t5看到这个序列。这将指示第二状态。序列的每一个集合可被处理为单独的触摸事件,或这些序列一起的任何组合可被解释为触摸事件。这些不同的组合可被称为“触摸特征”。上述序列可被描述如下:
1)如果S>x(1.50)(有效区设定点=x(1.50))
以及
2)dS/dt>+Lo dS/dt(3.50)和dS/dt<+Hi dS/dt(4.50),后面是
3)dS/dt返回到0,则
4)触摸#1被检测到(在时间t2)
5)如果触摸#1未重置(不返回到“无触摸”状态),则
6)如果dS/dt>+Lo dS/dt(3.50)和dS/dt<+Hi dS/dt(4.50),后面是
7)dS/dt返回到0,则
8)触摸#2被检测到(在时间t4)
图33和34示出可使用上面描述的序列的多触摸输入布局。注意,每一个触摸传感器116包括电极,电极包括两个交叉的圆118、120。每一个圆118、120被依尺寸制造为近似变平的手指的尺寸。当手指在正常触摸期间接触玻璃表面时,这将优化并限制手指到传感器的耦合的量。如果人在最远离迹线连接的圆“顶圆”之上触摸,则这将被登记为触摸#1。如果手指然后滚动(由dS/dt的步骤3分离,返回到零),则底圆允许手指增加其到传感器的电容耦合,允许触摸2的检测。具有不规则或间断的其它周边的其它电极配置也是可能的。这说明触摸电极设计可被修改以增强“触摸特征”响应。电极结构可被增强以帮助过滤出不想要的刺激S。
图35示出具有有效区的多电极触摸传感器,其例如将在如图1中的电容传感器中被使用。基本时域差分逻辑可被应用,其中简单的开关功能可被代替。图36示出触摸检测电路,其可以与图8中的检测电路相同,例外是预先确定的阈值处理电路108用具有检测元件Cs、Ce、控制设备A和C、输出驱动B和模数转换器106的时域差分处理电路114代替,其中所述模数转换器106的输出被称为刺激(S)并被输出到时域差分处理电路114。通过忽略在相反的方向上作为触摸刺激S移动的刺激S,这种类型的检测电路与其相关的双电极方法可以是更抗水干扰的。刺激S将倾向于在水的相反的方向上移动,水放置在双电极传感器区域之上的触摸表面上。在处理刺激S和刺激相对于时间的变化率dS/dt中描述的所有技术可用于处理与图35和36相关的输出。此外,可应用使用公共处理电路来测量多个双电极传感器的响应的概念。一个特定的配置是图37所示的配置。图37示出具有与如图35和36所述的八个双电极传感器的多输入配置。每一个传感器由Ce1、Ce2、Ce3、Ce4、Ce5、Ce6、Ce7、Ce8的净效果电容表示,且每一个传感器具有用于使采样电容器Cs和相关处理电路连接/隔离的控制设备(1-8)。在本例中示出Ce1到Ce8,所有传感器都经由一个公共驱动线由输出驱动器B驱动并经由第二公共驱动线由输出驱动器D驱动。图38特别适用于图37。经由在图39和图40中的布局示出了其它配置,其使用类似的技术是可能的。通过在每一个传感器位置上增强从外电极104到内电极100的耦合来针对抗扰性优化在图40中的布局。通过增加每一个外导电焊盘和内导电焊盘100、104的外周边的线性长度来实现增强的耦合,其中它们彼此相邻,同时最大化焊盘面积的量以增加通过水从外焊盘到内焊盘的耦合。如果水放置在特定的感测电极结构之上的触摸表面112上,允许较大的刺激S,则这将最大化刺激的大小。由水(在触摸刺激的相反方向上)引起的较大刺激允许处理电路更容易区分开水与触摸刺激。
参考图41,注意以柔性基片的形式的额外电介质层122的添加,电介质层122由以刚性基片的形式的第一电介质基片102分离。可以用各种方式实现和维持该分离,且在电介质柔性基片122和刚性基片102之间的材料可以是包括空气的多种结构。图42示出通过隔板124在柔性基片122和刚性基片102之间的分离和支持。隔板124的目的是支持并维持在柔性基片122和刚性基片102之间的空气间隙。注意,额外的电介质材料和相关空气间隙位于有效区内。图41-43示出使用时域差分感测技术的三维传感器的结构的功能。图42示出与电介质柔性基片122的触摸表面112接触的手指/附件。这将产生第一“触摸事件”。图43示出与电介质柔性基片122的触摸表面112接触的手指/附件,且其中手指/附件正在施加足够的物理压力以压下和弯曲电介质柔性基片122,以便减小距离并增加在触摸电介质柔性基片122的顶侧的手指/附件与在刚性基片102的顶侧或底侧上的传感器电极100之间的介电常数。
图44和45示出在图42和43中的传感器结构的操作的时序图。传感器结构的一个基本实现可如下:从时间t0到t1,刺激S和S相对于时间的变化率dS/dt都在“无触摸”条件下(S的1.00的基本值和dS/dt的3.00的基本值)。从t1到t2,当手指/附件接近柔性表面的上侧上的触摸表面时,如图42所示,S增加2.00的值,直到手指在t2被触摸表面限制为止。因此,从t1到t2,dS/dt在4.00的值处,指示S相对于时间的变化率。在t2,当手指/附件停在触摸表面处时,dS/dt返回到3.00的基本值。事件的这个序列可作为有效触摸事件被处理。从t2到t3,手指/附件与触摸表面接触,且刺激S在2.00的值处。同时,没有刺激相对于时间的变化,且因此dS/dt在3.00的基本值处(无变化)。从t3到t4,手指/附件施加压力,使柔性基片弯曲,减小距离并增加在手指/附件与刚性基片的底侧上的传感器电极之间的介电常数(通过使用柔性基片材料移动空气)。这个行动将使刺激S增加。这在图44中被示为刺激S从t3到t4从2.00的值增加到3.00。同时,将有如图45所示的在dS/dt中的跳跃。dS/dt的值从t3到t4被示为4.00的值。在t4当手指/附件停止增加柔性基片的偏斜时,刺激S停止增加并在图44中被示为停止在3.00的值处。同时在t4,dS/dt返回到“无变化”,如在3.00的基本值处指示的。事件的这个序列可作为触摸事件被处理。从t4到t5,没有手指/附件的刺激插入的变化,且图44和45示出如上所述的状态。从t5到t6,手指/附件将从有效区之外的触摸表面移除。刺激S下降到“无触摸”状态,其具有1.00(3.00的基本值+(-2.00)=1.00)的值的同时负(-dS/dt)。在t6,传感器在“无触摸”状态中,且S和dS/dt分别返回到1.00和3.00的其基本“无触摸”状态。
与上述时域差分感测技术耦合的在图42和43中所示的触摸传感器的构造可产生新特征,同时维持正确的触摸“感觉”的一致性,而不考虑通常困扰公约电容的可被引入的很多变量和利用预先确定阈值的差分感测技术。这个构造可被考虑为基本三维触摸传感器,因为可以有对触摸表面上的给定触摸位置的至少一个和然后两个响应。参考图41至45,逻辑步骤的序列再次可以是:
1)如果S>x(1.50)(有效区设定点=x(1.50))
以及
2)dS/dt>+Lo dS/dt(3.50)和dS/dt<+Hi dS/dt(4.50),后面是
3)ds/dt返回到0,则
4)触摸#1被检测到(在时间t2)
5)如果触摸#1未重置(不返回到“无触摸”状态),则
6)如果dS/dt>+Lo dS/dt(3.50)和dS/dt<+Hi dS/dt(4.50),后面是
7)dS/dt返回到0,则
8)触摸#2被检测到(在时间t4)
这的有效结果将是依次的两个不同触摸的检测。此外,上面不取决于除了有效区的宽松限定的设定点以外的预先确定阈值。可替换地,并参考图41到45,条件的下列逻辑序列将产生与以前的示例相同的结果,但也许基于添加来自处理电路可用的数据的额外的条件而具有稍微更高的可靠性:
1)如果S>x(1.50)(有效区设定点=x(1.50))
以及
2)dS/dt>+Lo dS/dt(3.50)和dS/dt<+Hi dS/dt(4.50),后面是
3)ds/dt返回到0,则
4)触摸#1被检测到(在时间t2);记住S(S1=S)的值
5)如果触摸#1未重置(不返回到“无触摸”状态),则
6)如果dS/dt>+Lo dS/dt(3.50)和dS/dt<+Hi dS/dt(4.50),后面是
7)dS/dt返回到0(S>2.75),则
8)如果S>S1,则
9)触摸#2被检测到(在时间t4)
这的有效结果将是依次的两个不同触摸的检测。此外,即使处理电路估计刺激S,预先确定阈值仍然不被使用,但S的两个变量值被得到并彼此比较。
又一替换形式将是条件的下列逻辑序列,其可产生相同的结果,但基于对处理电路可用的信息而具有也许更高的可靠性:
1)如果S>x(1.50)(有效区设定点=x(1.50))
以及
2)dS/dt>+Lo dS/dt(3.50)和dS/dt<+Hi dS/dt(4.50),后面是
3)ds/dt返回到0,且(S>1.75和S<2.25),则
4)触摸#1被检测到(在时间t8)
5)如果触摸#1未重置(不返回到“无触摸”状态),则
6)如果dS/dt>+Lo dS/dt(3.50)和dS/dt<+Hi dS/dt(4.50),后面是
7)dS/dt返回到0且(S>2.75),则
8)触摸#2被检测到(在时间t4)
这的有效结果将是依次的两个不同触摸的检测。此外,即使处理电路估计刺激S,预先确定阈值仍然不被使用(但两个单独的范围被估计)。
参考图42到43和特别是图44和45。时间t7到t14示出基于来自由柔性基片的顶表面上的手指/附件增加压力的增加偏斜来显示线性感测的方式。图44示出通过将手指/附件施加到柔性基片的顶表面并接着施加增加压力和因而柔性基片的偏斜在一系列步骤中增加刺激。图45示出增加的压力和因而由dS/dt的四个交替脉冲进行的分立步骤中的偏斜的序列。事件序列的处理的示例可以如下:
1)如果S>x(1.50)(有效区设定点=x(1.50))
以及
2)dS/dt>+Lo dS/dt(3.50)和dS/dt<+Hi dS/dt(4.50),后面是
3)dS/dt返回到0,则
4)触摸#1被检测到(在时间t8);记住S(S1=S)的值
5)如果触摸#1未重置(不返回到“无触摸”状态),则
6)如果dS/dt>+Lo dS/dt(3.50)和dS/dt<+Hi dS/dt(4.50),后面是
7)dS/dt返回到0且(S>S1),则
8)触摸#2被检测到(在时间t10),记住S(S1=S)的值
9)如果触摸#1未重置(不返回到“无触摸”状态),则
10)如果dS/dt>+Lo dS/dt(3.50)和dS/dt<+Hi dS/dt(4.50),后面是
11)dS/dt返回到0且(S>S1),则
12)触摸#3被检测到(在时间t12),记住S(S1=S)的值
13)如果触摸#1未重置(不返回到“无触摸”状态),则
14)如果dS/dt>+Lo dS/dt(3.50)和dS/dt<+Hi dS/dt(4.50),后面是
15)dS/dt返回到0且(S>S1),则
16)触摸#4被检测到(在时间t14),记住S(S1=S)的值
图46和47示出图42和43的构造的替换构造。图46和47示出由折叠式隔板124分离的两个刚性基片102、122的构造,其将允许在上刚性基片122的顶部触摸表面112上的手指/附件和下刚性基片102的顶侧或底侧上的传感器电极100之间的减小的距离/增加的平均介电常数。图48类似于图41中的传感器的构造,有两个例外:1)传感器电极100位于并附接在上柔性基片122的底侧126上,以及2)额外的电极128位于下刚性基片102的顶侧130上。额外的电极128被偏置在地电位处,并且也可位于上刚性基片122的底侧上。地允许刺激的变化,因为它在柔性基片朝着(但不触摸)接地偏置电极128移动时模拟手指/附件。上面描述的时域差分技术可使用在图41到42、43、44、47和48中示出的所有结构来实现。
图49和50示出与图41到48所示的配置类似的但具有到目前为止所述的多电极结构和其它类似结构的类似配置。顶部触摸表面112所位于的上基片122可由柔性或刚性基片制成,只要在图41到48的物理构造和操作中描述的技术被应用,再次有例外:多电极技术被使用。可对图49和50中的结构以及还有其等效形式应用利用时域差分检测和处理技术的所有检测和处理技术。此外,感测电极100被描绘为位于上刚性基片122的上侧上,而偏置电极128被描绘为位于下刚性基片102的顶部上。然而在其它实施例中,感测电极100位于下刚性基片102的顶部上,且偏置电极128位于上刚性基片122的下侧上。
利用如上所述的检测S和dS/dt的技术组合不同的序列可用于创建其它用户输入特征。这些用户特征可增强触摸输入功能的实利的功能。图51/52、53/54、55/56和57/58示出可被使用的多种序列中的一些,其将等同于多种特定的输出功能。作为示例:
图51/52示出事件的序列,其基本上意味着当触摸输入刺激被带到没有压下的表面时,然后进一步按压、后面是轻触摸、然后压下、然后轻触摸、然后最后压下可指示函数。同样,轻轻压下、后面是压下可选择特定函数,而下一压下可选择子函数,后面是轻触摸,以及下一压下将是第二子函数。
图53/54示出在与图51/52相同的触摸输入位置处,如果触摸刺激是触摸并立即压下触摸输入且也许高于x2的S值(伴随有S值>x2的dS/dt),则当存在跟随有第二压下的轻触摸时,函数将是不同的函数,后面是子函数值。
图55/56示出在与在图51/52和53/54中描述的相同的触摸点处,除不同组的条件以外。在这组序列中,在最初压下和后面是时间周期的第一行动(伴随有S值>x2的dS/Dt)之后,然后基于轻触摸/压下序列(类似于上面)的两个子函数选择。
最后,类似于图55/56,序列示出与所描述的类似的“特征”,其中时间被再次使用,除了在首先轻触摸之后,然后一组子函数(在这种情况下是三个),其中通过后面是轻触摸的压下来选择子函数。
基于上面的描述,对本领域中的技术人员而言明显的是,存在可用于限定不同的输入序列的很多序列,没有一个依赖于用于触摸的主要检测的预先确定阈值。如在任何一个序列图中注意的,与时域差分处理有关的任何一个序列图依赖于用于检测至少第一触摸的绝对值。当然,如上所示,即使我们将结合检测dS/dt的技术来使用预先确定阈值,可靠性和新特征也可被添加到简单的触摸响应。此外,可以通过仔细控制具有如上所述的传感器的构造的范围(即,基于两个阈值的两个触摸点且结合序列的时间和数量)使用预先确定阈值技术来稍微成功地使用上面的序列。与如本文所述的时域差分处理技术比较,预先确定阈值技术的限制仍将适用。
如早些时候所述的,用于感测触摸输入的时域差分感测技术需要以足够快的速率采样以至少检测dS/dt的上升和下降,例如检测触摸。即使是这样,与电噪声和其它环境条件的速率比较,人可触摸触摸输入感测设备的速率也慢。同样,触摸刺激的变化率比其它因素例如温度、湿气、冰等和当然静态偏移例如电介质基片厚度、介电常数和在环境中根本不改变(dS/dt=0)的其它事情快得多。图59/60示出可被电子地使用的滤波器132、软件或这两者的组合的应用和使用。滤波器132可被构造为低通滤波器,以便过滤出可能以比可能由人执行的速率大的速率影响刺激的变化。同样,滤波器也可用于以高通滤波器的形式过滤出较慢的信号。也可使用低通和高通滤波器的组合或这两者的整体形式以形成带通滤波器。刺激和检测电路134将在必要时并基于用于感测触摸刺激的技术和传感器电极结构(不管是单电极传感器还是多电极传感器)刺激。滤波器132将过滤出与触摸无关的那些频率,且接着时域差分处理电路114然后将通过序列S和dS/dt识别与有效输入函数有关的“特征”。使用单独的滤波器将降低时域差分处理电路114的信号处理速度要求。此外通过使滤波器功能与“特征”识别功能分离,滤波器块132可被修整至以较低的成本通过使用现有技术的集成电路设计的更紧密滤波器设计。图59示出单电极结构的使用,且图60示出滤波器132可如何用在多个传感器输入应用中。
参考图61。图61示出用于检测触摸输入的双电极结构,双电极结构具有第一电极100和位于第一电极100附近的第二电极104。差分测量电路可抑制共模信号,例如电噪声、干扰和温度变化。可使用时域差分技术而不是使用预先确定阈值技术来输出处理因而产生的差分信号,从而允许触摸输入的提高的检测以及允许如到现在为止描述的增强的特征的开发。图61指示“内”和“外”电极100、104的使用,每一个被表示为Cinner和Couter。每一个电极100、104被刺激,从而创建由如在Cinner和Couter电极中的每一个之上和之下伸展的箭头所示的电场。原则上在图62中示出基于在Cinner和Couter电场中的差异的净电场。图61中的电场可被产生并被测量,被时间分开,以接着由与前面在图26中描述的电路相似的处理电路比较。
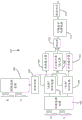
图63示出耦合到刺激和检测电路134的Cinner和Couter,其中每一个电极的信号被滤波并由时域差分特征处理电路114处理。所有块110、114、132、134至少如在本公开中描述的操作。刺激和检测电路134将首先刺激Cinner电极并接着通过使控制设备1接通并然后断开来测量Cinner电极。刺激和检测电路134将然后重复这个循环,但对于Couter使用控制设备2。这两个电极的因而产生的输出的差异将然后连同与可能稍后由时域差分处理电路114使用的与电极相关的其它参数一起被输出。其它可能的参数可以是Cinner和Couter电极中的每一个的非差分信号值、共模电压值等。刺激和检测电路134的输出将然后可选地耦合到滤波函数132,其输出转而耦合到时域差分特征处理电路114,其中触摸事件或触摸事件的系列由在时域差分电路块114中匹配的序列限定,如已经在本文描述的。时域差分电路114的输出然后耦合到输出响应电路110。
可选地如图64所示,Cinner和Couter中的每一个将被刺激,且第一和第二刺激和检测电路136、138将同时检测在Cinner和Couter上的电场。Cinner和Couter电极的电响应将同时由内部缓冲器140、外部缓冲器142和差分缓冲器/放大器144处理。Cinner和Couter的差分值的同时处理将基于Cinner和Couter值的实时噪声耦合极大地提高共模噪声抗扰性。内部缓冲器140、外部缓冲器142和差分缓冲器/放大器144的输出将耦合到滤波函数132和块的其余部分以如前所述和如在图64中所示的类似地进行处理。再次但以较大的有效性,差分测量技术经由辐射电磁干扰或通过传导电磁干扰耦合导致电噪声的抑制。在前面的示例中,处理刺激S和dS/dt的第一步骤被检测,如果S的值已超过x的宽松接近度设置以验证信号足够强以处理dS/dt事件。来自图22、23、24和25的用于识别简单的触摸示例的序列如下:
1)如果s>x(接近度阈值)
以及
2)ds/dt>0,后面是
3)ds/dt=0,则触摸事件
使用差分感测技术,其中差分输出信号与触摸成比例但可使电噪声衰减,则序列的第一步骤可如下被消除:
1)ds/dt>0,后面是
2)ds/dt=0,则触摸事件
其中s=S(Cinner)–S(Couter),且ds/dt基于图64中的Cinner和Couter的差分输出。
这可根据特定的应用也许在没有滤波函数的情况下实现。消除滤波函数的优点将是可能的简化和也许较快的响应时间的问题。滤波函数倾向于减少响应时间。此外,通过引入差分感测技术,且甚至滤波函数可减小时域差分处理的处理要求。在其它情况下,使用软件数字滤波技术结合差分感测技术实现滤波函数可能是有益的。
差分感测技术也可实现如前面讨论的三维感测技术。以很多方式,可使用早些时候讨论的很多结构和布局,因为差分处理主要在电子处理电路中实现。图65到68示出可与时域差分处理与差分电极感测一起使用的前面讨论的结构和布局。图65/66是如前面讨论的但使用差分感测电极结构的三维的示例。每一个电极结构的上基片可以是柔性或刚性的,在操作上与前面的示例一致。
在图69中示出将组合在图35到40中描述的感测技术和差分电极感测技术的益处的电极结构。图70和71示出与图63和64可比较的可比较感测技术。特别是,图69示出额外电极146的使用。这个额外电极146用作选通电极以将场耦合到与图35到40所述并与图35到40相关联的感测电极类似的感测电极100。与图35到40不同,图69示出两个单独的电极Cinner100和Couter 104共有的且同时为了耦合到两个单独的电极Cinner 100和Couter104的目的的选通电极146。选通电极146位于在Cinner 100和Couter 104所位于的基片148的相对侧上的Cinner 100和Couter 104之下。基本结构通过从选通电极146耦合到感测电极(在这种情况下是同时两个感测电极)而允许额外的水抗扰性。图70示出耦合到Cinner 100和Couter 104的选通电极。处理电路显示使用多重测量技术进行处理。类似于如图63所述的,通过测量被时间分离的Cinner 100和Couter 104来计算差分感测。图71示出与在图64中示出的用于同时测量Cinner 100和Couter 104差分感测的技术类似的技术,再次具有公共选通电极146和刺激电路150。如前面所述的共模抑制、水抗扰性和时域差分感测技术的益处的组合都可通过实现在图69中和在图71中的基本电极结构来被集成和利用。
图72示出基于在图69中被示为耦合的Cinner 100和Couter 104之间的电位中的差异的电场。图73和74再次如前所述示出与三维电极相关联的结构,其可增强时域差分感测可提供的特征。图75和76示出如所讨论的与图69到74有关的三个电极结构的阵列。图75示出Cinner和Couter的电极的阵列,且图76示出选通电极的电极的阵列。图77和78是在图75和76中示出的与三个电极结构有关的替换示例。图77示出Cinner 100和Couter 104的电极阵列,且图78示出选通电极146的电极阵列。在图77和78中描绘的电极结构基于从选通电极146到Cinner 100和Couter 104的增加的耦合而将被考虑为比在图75和76中所示的更有水抗扰性,这帮助区分开水与人触摸。
额外的实施例可包括上面讨论的差分感测技术。例如,电容传感器可包括彼此电隔离的多个电容开关,其中每一个电容开关包括具有第一和第二电极的电极对。电容传感器还可包括电耦合到多个电容开关中的每一个的差分测量电路,其中差分测量电路适合于同时或顺序地比较第一电极的自电容与第二电极的自电容,以帮助检测接近相关电容开关的刺激。差分测量也可适合于比较第一电极的自电容的变化率与第二电极的自电容的变化率。在本例中,可实质上通过如上面结合图37-40讨论的时域差分处理电路114来确定电极电容的变化率。此外通过示例,时域差分处理电路114可适合于确定相关电容的变化率,其中相关电容包括在第一电极自电容和第二电极自电容之间的差异。仍然进一步通过示例,时域差分处理电路114可适合于测量在第一和第二电极之间的互电容的变化率。有关方法可包括:a)提供多个电极对,每一个电极对包括内电极和外电极,b)测量在多个电极对中的每一个电极的自电容,以及c)比较每一个内电极的自电容与成对的外电极的自电容以可选地使用单个差分感测电路来确定接近该电极对的刺激的存在。该方法还可包括比较每一个电极对的内电极的电容的变化率与外电极的电容的变化率。该方法可更进一步包括比较内电极的电容与外电极的电容以限定相关电容,以及确定相关电容随着时间的变化。
另一实施例包括触摸板或触摸屏,其包括电耦合到差分测量电路的电极行和电极列。在这个实施例中,差分测量电路适合于同时或顺序地比较一个或多个电极行的自电容与一个或多个电极列的自电容,以确定在触摸屏显示器上的刺激的存在。差分测量也可适合于比较电极行的自电容的变化率与另一电极行的自电容的变化率。在本例中,可实质上通过如上面结合图37-40讨论的时域差分处理电路114来确定电极电容的变化率。此外通过示例,时域差分处理电路114可适合于确定相对电容的变化率,其中相对电容包括在一行或列的自电容与另一行或列的自电容之间的差异。仍然进一步通过示例,时域差分处理电路114可适合于测量在两行、两列或一行和一列之间的互电容的变化率。有关方法可包括:a)提供多个电极,其包括电极行和电极列,b)测量每一个电极行和每一个电极列的自电容,以及c)比较多个电极中的至少两个的自电容以可选地使用单个差分感测电路来确定在触摸屏显示器上的触摸输入的二维位置。该方法还可包括比较行电极的电容的变化率与列电极的另一行电极的电容的变化率。该方法可更进一步包括比较任何两个电极的电容以限定相对电容,以及确定相对电容随着时间的变化。
III.矩阵电极触摸传感器
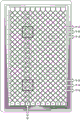
图79到85示出可布置成形成用于使用如前讨论的时域差分技术来检测多个点的矩阵156的电极152的列和电极154的列的系列。电极152、154的矩阵可以是不透明的、半透明的或透明的,并可使用丝网印刷、无电镀、电镀或包括嵌入或组装导线或在载体基片上或内的其它组装部件的其它技术由导体、半导体或电阻材料制成。矩阵156的构造可包括插在电极列152和电极行154之间的电介质158。例如,矩阵156可包括导电材料例如在聚酯或聚碳酸酯膜或玻璃上的印刷银环氧树脂、在玻璃或印刷电路板上的铜、在聚酯或聚碳酸酯膜或玻璃上的氧化铟锡(ITO)、或沉积在膜或玻璃上的碳纳米材料。图79和80是电场可如何通过用于检测电容变化(包括在本文描述的电容变化)的任何技术从列和行生成的侧视图。在图79和80中的侧视图中所示的列在图81中的顶视图中示出,且同样在图79和80中的侧视图中所示的行在图82中的顶视图中示出。图83示出在顶视图中的列和行的组合视图。
图84示出使用如早些时候在图59和60中描述的但应用于图79到85中的行/列矩阵的概念的基本感测电路170。这个电路170将使用利用如前所述的参数的时域差分感测对每一个列152和然后每一个行154采样,确定期望输出响应的适当触摸特征。图85示出使用图84中的电路采样技术来驱动和读取的列。因为每一个列电极被刺激,与图79所示的电场类似的电场将被生成。类似地,图86示出使用图84中的电路采样技术来驱动和读取的行。因为每一个行电极被刺激,与图80所示的电场类似的电场将被生成。也可使用差分电极感测时域差分感测技术,如关于图60到63描述的。图88到90示出可如何通过分析三列电极和三行电极来制造“虚拟”内电极和外电极结构。图88示出三列电极的感测,每列单独地使用图84所示的电路。图89示出三行电极的感测,每行单独地使用图84所示的电路。最外列和最外行电极、虚拟外电极的集成被创建。最内列电极和最内行电极及虚拟内电极的集成被创建。虚拟内电极和虚拟外电极的差异创建在图61和62中所示的差分电极结构的基本属性。通过在进行测量时知道列和行的电极的地址来知道矩阵中的虚拟电极的位置。这在图90中的列电极和行电极的交叉处的阴影区域中示出。
图91和92示出在操作上类似于在20中描述的操作的流程图。在检测到触摸特征之后插入位于电极列和行之间的输入的位置的额外标准。图91和92中的流程图示出基本触摸输入的特征。触摸位置的插入未被执行,直到在触摸特征被识别出为止。类似于使用预先确定阈值来确定触摸并具有早些时候描述的因而产生的缺点的单按钮的常规电容传感器,使用预先确定阈值来确定触摸的投影式电容触摸屏也具有类似的问题。通过使用如本文描述的时域差分技术,单输入触摸电极的益处可用于提高触摸屏、鼠标板(mouse pad)和其它高分辨率/高输入设备的性能。在图90中所示的矩阵触摸输入设备将具有至少209个单输入。有插入的矩阵将接近与一般电容触摸屏的分辨率相同的分辨率,但具有使用不戴手套的裸手指或戴手套的手指的准确触摸输入的增加的益处以及其它特征例如将然后触发位置的插入的用于触摸的独特特征限定。可以用多种方式修改图91和92中的流程图。例如所有电极的所有数据可被采样并存储且接着为了触摸特征而被分析,以及如果存在有效触摸特征匹配则有插入和手势识别。图91和92示出对于有效触摸输入和在然后存在插入且手势识别被译解的情况下的一次一个电极的采样。图93和94示出寻找触摸特征匹配的匹配以及非触摸特征的匹配的概念。这个概念说明,在触摸特征恰好使用本文描述的参数和技术的一些情况下,时域差分感测技术可在触摸译解水平处作手势时被考虑为基本的。
图95示出用于一次对列和行同时刺激三个电极的图84所示的电路的修改版本。例如,开关13B和15B将被选择来确定列2和4到外部电路块138的刺激和检测电路的路线,且14A将被选择来确定列3到内部电路块136的刺激和检测电路的路线。绝对值和差分信号将被处理并发送到滤波块132和时域差分特征处理电路114。同时测量电极的益处在与图64相关联的如前所述的相似方式中将是有益的。同样和类似地,可通过分别选择行3、4和5的开关3B、5B和4A来测量行3、4和5。再次,列和行的寻址将确定矩阵传感器170的虚拟触摸区。
图96和97示出矩阵触摸传感器170的侧视图,矩阵触摸传感器170类似于在图35到40中描述的传感器,除了在列和行矩阵中被应用以外。图96示出通过对行电极154选通并接着寻找在列电极152上的响应的从行电极154到列电极152的耦合。相反,图97示出通过对列电极152选通并接着寻找在行电极154上的响应的从列电极152到行电极154的耦合。图98是用于刺激列并接着读取在行R1上的响应的电路。我们可只对列选通并读取行或只对行选通并读取列,但为了增加鲁棒性,做这两者可增加鲁棒性。图99示出图98中的电路,其增加了用于确定刺激单独地到任何行或列的路线的刺激选择电路160、162的供应。同样,图99示出图98中的基本电路,其增加了用于将来自任何行或列的响应按规定路线发送到响应检测电路164的选择电路的供应。图91到94所示的流程图如上所述被应用以确定是否存在发起的触摸特征事件、插入和手势识别,且列/行和/或行/列选择可确定矩阵中的触摸的位置。
图100示出用于两列的选通和读取的行的单独选择。所有列可与一次选通一起同时被读取,但更成本有效的方法是对同一行选通,同时接着测量单独选择的列。该过程将重复,直到所有列及其响应被测量为止,虽然以处理时间为代价。注意,一行刺激可用于检测沿着单独的列的两个单独的触摸响应。图101相反示出列的选通,同时单独地选择并读取行的响应。再次注意,可以有来自两个不同行的两个响应,一行的刺激对一列选通。图102示出对行选通和读取列响应都共有的触摸输入的公共交叉部分以及图100和101中的列的选通和行响应的读取。此外在这种采样技术中,每一个列/行和/或行/列组合单独地被采样。即使采样单独地完成选择,也可使用与早些时候描述的技术类似的差分感测技术。
可如图103到109所述的实现额外的差分感测技术。使用如在图96到102中所述的基本选通/感测技术,例外是代替读取来自选定单独列152和/或行154的响应,三个选定列和/或行的组被同时产生并接着按照105和106被处理。图105示出与图36和37及图69到71有关的技术。当为响应选择任何三列或任何三行时,最外列或最外行被同时选择并被确定到外部检测电路138的路线,其中输出被发送到外部缓冲器142和差分缓冲器/放大器144以用于稍后由时域差分处理电路144处理。此外,最内行或最内列被选择并被确定到内部检测电路137的路线,其中输出被发送到内部缓冲器140和差分缓冲器/放大器144以用于稍后由时域差分处理电路144处理。
图107到109类似于图100到102,因为存在列的选通和来自行的响应的读取,与行的选通和列的响应的读取相反,例外是代替选择单独的行和列用于读取响应,同时存在三个行和列的选择。再次注意,在图107中,对于列选通可以有在行上的两个或更多响应。且类似地在图108中,对于行选通可以有在列上的两个或更多响应。图109示出对列的选通和读取行响应及图107和108中的行的选通和读取列响应都共有的触摸输入的公共交叉部分。再次,将使用在图91到94中的流程图,且针对使用时域差分特征识别处理的差分电极描述的技术和益处将适用。
图110到129示出使用三维触摸传感器的时域差分触摸特征处理的其它潜在的使用。图110到113示出柔性基片122添加到在图81到83、85到87、88到90、100到102和107到109中示出的任何基本结构。柔性基片122与用于描述图41到43、65、73、74的技术将类似地被使用。图110和图112示出当列和行如在图81到83和图85到90中所示的被刺激时由列和行形成的电场的侧视图。图111和图113示出当列和行如在图100到102和图107到109中所示的被刺激时由列和行形成的电场的侧视图。图114示出手写笔172可如何被使用,且图115示出手指174的使用。如果手写笔尖连接到导电材料,且如果这个导电材料耦合到人的手,则手写笔可在类似于图115中所示的手指的结构中被使用。可使用较小的更高分辨率的输入刺激的增加的益处。图116到119示出使用列/行矩阵构造的三维电极结构的另一变形。三维电极结构可包括在电极行和电极列之间的间隙,可选地空气间隙。除了时域差分感测以外,三维电极结构也可应用于常规电容感测和差分感测。当手指174或手写笔172朝着偏置电极128移动列/行矩阵时,这个变形允许朝着偏置电极(例如地)128的列/行矩阵的弯曲以影响刺激的变化。偏置电极128可包括任何DC电位、脉冲AC电位或被选通,并可被定位成相邻于上基片122。其它配置也是可能的,假定在感测电极和偏置电极之间有相对运动。手指或手写笔在接近触摸基片122的表面112时将引起刺激的增加。当手写笔或手指朝着偏置电极128移动柔性列/行矩阵(局部化)时,增加的刺激将被插入。图120和121示出手指174和手写笔172的使用。
图122到129示出由可压缩的隔板124分离的两种刚性材料102和122制成的三维时域差分电极结构的使用。图122和124示出由刚性基片122构成的顶部刚性传感器组件的侧视图。所示构造也特别适用于矩阵型触摸输入设备170。顶部刚性传感器基片122直接或间接由隔板材料124支持,隔板材料124可被压缩以允许这两个刚性基片102和122移动得靠在一起,而在被手指174或手写笔172按压时没有上刚性基片122的很多偏斜。当手写笔172或手指174朝着刚性上传感器基片112移动并触摸刚性上传感器基片112时,时域差分触摸特征技术将用于确定触摸输入的匹配,然后插入和手势识别。如果手写笔172和手指174在触摸条件之后加压压力以便使支持刚性上传感器组件的隔板124压缩,从而允许传感器电极152、154朝着偏置电极128移动,则使用时域差分处理技术将允许额外的特征基于第三维输入而被添加。这些添加的特征类似于在图46、47、48、50和66中描述的特征。图126和128示出用于在不压缩隔板124的情况下检测触摸条件的手写笔和手指的使用。图127和129示出通过朝着下刚性基片102移动刚性上触摸表面122的在两个刚性基片122和102之间的空间的移动和减小(由于偏置电极而增加了刺激)。
此外通过共享导电行和列以及具有触觉驱动器的下导电偏置电极,相同的结构可用于生成触摸感测的第三维,并且也可用于生成触觉响应。触觉反馈变得越来越普遍,因为当触摸输入通过在手指处引起可调节振动刺激来产生时,用户体验增强了,其指示触摸由用户设备解释以及根据触摸特征或触摸特征/手势的类型被提供而提供不同的振动响应。时域差分对触觉是特别有用的,因为触摸的实际时刻被确定,这转而可用于生成触觉反馈。这将与使用预先确定阈值技术的系统相反,其中触摸输入可能被错误地或过早地解释,从而使触觉响应快或迟钝地触发。使用如本文所述的时域差分感测的优点在任何触觉应用中是真的。图122到129所示的集成触觉/时域差分特征电极结构(当在上和下刚性基片上的电极被共享时)可在移动和其它设备中提供减小的封装轮廓。例如,电容传感器可包括用于在其上接收触摸输入的上基片122、由上基片122支持的上电极152、与上电极152间隔开的下电极154和用于支持下电极152的下基片122’。集成电路、微控制器或FGPA例如可包括检测触摸输入的处理单元和包括在第一和第二间隔开的电极152、154之间的静电力以响应于其上的触摸输入而使上基片112振动的触觉驱动器。通过将处理单元和触觉驱动器组合成单个集成电路,例如触觉响应时延可能被减小。此外,处理单元可包括如上面实质上阐述的时域差分感测电路和/或差分感测电路。然而,在其它实施例中,上基片112的振动可由专用触觉控制器执行。在这些和其它实施例中,触觉驱动器和触摸感测的控制可被交错。此外可选地,上电极152可包括多个电极行,且下电极可包括多个电极列,如上面结合图81-82实质上阐述的。
IV.在光传感器中的时域差分感测
时域差分感测技术可应用于其它参数例如光的感测。图130示出LED照明和光传感器200的使用以确定在表面202之上的物体的特征。图130示出具有LED孔A1和A2的传感器板204的单行阵列以允许位于孔之下的LED L1和L2所发射的光的投影。有两个LED和孔,一个LED和孔在传感器条的一端处而另一LED和孔在相对端处。有一个传感器S1位于条的中间以用于感测反射光物体,当它们从LED L1和L2朝着触摸表面移动时。孔尺寸和几何结构被依尺寸制造成使得当物体在传感器条的顶部之上移动时光的强度将改变。当物体从光的左边移到右边时,光的强度将大致与sin(h2)和sin(h1)成比例地改变。当物体从左边移动到右边时角度h2将减小,且来自孔A1的光被物体反射到传感器S1并在强度上与角度h2成比例地减小。同时,从孔A2发射并由物体反射到传感器S1的光将在强度上大致与sin(h1)成比例地改变。LED L1和L2将通过驱动电路在刺激中交替。换句话说,L1将接通且传感器S1将测量反射光的强度并处理或存储以用于以后处理。L1将断开且L2将接通,以及从物体反射的反射光强度将由S1测量并被处理或存储以稍后用于处理。如果物体在传感器条之上保持固定但朝着表面垂直移动,则从LED L1和L2反射的光的强度都同时降低。相反,如果物体在传感器条之上保持固定然而远离传感器条表面移动,则反射强度在离开物体反射光中将增加。不是测量电场的刺激中的变化,而是测量在光强度中的这个刺激变化,物体将能够在传感器条200上被向上、向下、向左和向右跟踪,从而在触摸传感器板204上添加第三维。当手指或手写笔在表面202上移动时,不同的手指/手特征可被捕获以补充在触摸表面202处的触摸特征的相互作用,如前面在本文描述的。
结合触摸电极的行和列使用光的概念可被实现为分立按钮或高分辨率触摸矩阵。图131示出扩展在XY矩阵应用例如鼠标板或触摸屏210上的时域差分感测的一种可能性。图132示出与简单的分析三角学有关的变量以确定在平面(其可以是触摸屏、触摸板或键盘)之上的三维空间中的位置。触摸板或触摸屏可包括实质上如上面结合图122到129阐述的集成触觉。公式通常适用,其中光强度根据下式成比例地改变:
x=r*sin(angle r)*cos(angle y)
y=r*sin(angle r)*sin(angle y)
z=r*cos(angle r)

Angle y=inv tan(x/y)

其中来自光孔的强度将随着angle(r)而改变。
作为在本文使用的术语,“电容感测电路”是包括具有电容的一个或多个电极的任何电路,其响应于物体例如手指、手套或手写笔的存在而改变。电容感测电路可包括例如单个电极、电极对、多个电极对、采样和保持电容器、多个采样和保持电容器、电极行、多个电极行、电极列、多个电极列、复用器及其组合,而不管是现在已知的还是以后开发的。作为在本文使用的术语,“电容传感器”包括与一个或多个处理单元组合的电容感测电路(例如至少单个电极)以提供指示刺激的输出。示例性处理单元可包括模拟滤波器、模数转换器、数字滤波器、差分处理单元、时域差分处理单元、时域差分特征处理单元、刺激检测单元、手势识别单元、触觉驱动器及其组合,如可选地结合图16-129所阐述的。一个或多个处理单元可以是模拟或数字的,且例如可包括例如一个或多个集成电路、微控制器和FPGA。可在刺激的检测被期望的应用的整个范围内使用本发明的电容传感器,其包括触摸传感器、触摸屏、触摸面板和其它控制接口,不管是现在已知的还是以后开发的。
上面的描述是当前实施例的描述。可做出各种变更和变化,而不偏离如在所附权利要求中限定的本发明的精神和更宽方面,其应根据包括等价物的教义的专利法的原则被解释。本公开为了例证性目的而被呈现,且不应被解释为本发明的所有实施例的无遗漏描述或将权利要求的范围限制到结合这些实施例示出或描述的特定元件。例如且没有限制地,所述发明的任何一个或多个单独元件可由提供实质上类似的功能或否则提供足够的操作的替换元件代替。这包括例如目前已知的替换元件例如本领域中的技术人员可能当前已知的那些元件以及可在未来开发的替换元件例如本领域中的技术人员在开发时识别为替换形式的那些元件。此外,所公开的实施例包括一致地被描述且可协作地提供一组利益的多个特征。本发明并不只限于包括所有这些特征或提供所有陈述的益处的那些实施例,除了在否则在所发布的权利要求中明确阐述的程度上以外。以单数形式例如使用冠词“一”、“一个”、“该”或“所述”对权利要求元件的任何提及不应被解释为将元件限制到单数。对作为“X、Y和Z中的至少一个”的权利要求元件的任何提及意指包括单独地X、Y或Z中的任何一个和X、Y和Z的任何组合,例如X、Y、Z;X、Y;X、Z和Y、Z。
Claims (8)
1.一种电容传感器,包括:
具有互电容的多个电极;
在所述多个电极上的材料层;以及
处理单元,其电耦合到所述多个电极并配置成响应于物体接近所述多个电极中的一个而登记第一触摸特征,
所述第一触摸特征在第一实质上恒定互电容与第二实质上恒定互电容之间、在第一时间与第二时间之间的总时域(T)上发生,其中所述第一触摸特征包括所述互电容的变化率(ds/dt),所述变化率(ds/dt)结合所述第一触摸特征的以下参数:
在所述总时域(T)期间互电容中的间隔变化(ds),其中互电容中的所述间隔变化(ds)小于第一触摸事件的互电容中的总变化(S),
对应于互电容中的所述间隔变化(ds)的间隔时域(dt),其中所述间隔时域(dt)小于所述第一触摸事件的总时域(T)。
2.如权利要求1所述的电容传感器,其中所述触摸特征包括在所述总时域(T)期间互电容中的总变化(S)。
3.如权利要求1所述的电容传感器,其中互电容中的所述间隔变化(ds)是互电容的增加。
4.如权利要求1所述的电容传感器,其中互电容中的所述间隔变化(ds)是互电容的减小。
5.如权利要求1所述的电容传感器,其中互电容中的所述间隔变化(ds)在所述间隔时域(dt)期间实质上为零。
6.如权利要求1所述的电容传感器,其中所述多个电极中的一个是感测电极,并且其中所述多个电极中的第二个是与所述感测电极间隔开的选通电极。
7.如权利要求1所述的电容传感器,其中所述处理单元还配置成响应于物体从所述多个电极后退而登记第二触摸特征。
8.如权利要求1所述的电容传感器,其中所述多个电极中的第一电极是电极行,并且其中所述多个电极中的第二电极是电极列。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261639373P | 2012-04-27 | 2012-04-27 | |
| US61/639373 | 2012-04-27 | ||
| CN201380033387.4A CN104603729B (zh) | 2012-04-27 | 2013-04-26 | 用于确定触摸输入刺激的装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201380033387.4A Division CN104603729B (zh) | 2012-04-27 | 2013-04-26 | 用于确定触摸输入刺激的装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108646937A CN108646937A (zh) | 2018-10-12 |
| CN108646937B true CN108646937B (zh) | 2021-07-30 |
Family
ID=49484036
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810058790.7A Active CN108646937B (zh) | 2012-04-27 | 2013-04-26 | 用于确定触摸输入刺激的装置 |
| CN201380033387.4A Expired - Fee Related CN104603729B (zh) | 2012-04-27 | 2013-04-26 | 用于确定触摸输入刺激的装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201380033387.4A Expired - Fee Related CN104603729B (zh) | 2012-04-27 | 2013-04-26 | 用于确定触摸输入刺激的装置 |
Country Status (9)
| Country | Link |
|---|---|
| US (2) | US10248264B2 (zh) |
| EP (1) | EP2842020A4 (zh) |
| JP (3) | JP2015518218A (zh) |
| KR (3) | KR102262597B1 (zh) |
| CN (2) | CN108646937B (zh) |
| AU (3) | AU2013251459A1 (zh) |
| CA (1) | CA2871246A1 (zh) |
| SG (1) | SG11201406896WA (zh) |
| WO (1) | WO2013163496A2 (zh) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9110543B1 (en) * | 2012-01-06 | 2015-08-18 | Steve Dabell | Method and apparatus for emulating touch and gesture events on a capacitive touch sensor |
| US9142363B2 (en) * | 2013-02-27 | 2015-09-22 | Microchip Technology Germany Gmbh | Method for forming a sensor electrode for a capacitive sensor device |
| US10955973B2 (en) * | 2013-04-16 | 2021-03-23 | Atmel Corporation | Differential sensing for touch sensors |
| US10589049B2 (en) | 2013-12-18 | 2020-03-17 | Koninklijke Philips N.V. | Fluid connector with exhaust valve |
| WO2015134569A1 (en) | 2014-03-04 | 2015-09-11 | Alsentis, Llc | Simultaneous time domain differential sensing and electric field sensing |
| CN103699262B (zh) * | 2013-12-20 | 2016-08-17 | 合肥京东方光电科技有限公司 | 一种触摸屏及其制作方法、显示装置 |
| CN105183202B (zh) * | 2014-05-30 | 2018-05-04 | 宸鸿光电科技股份有限公司 | 触控模块及其制造方法 |
| JP2016208342A (ja) * | 2015-04-24 | 2016-12-08 | 信越ポリマー株式会社 | 静電容量型入力装置 |
| CN105068690B (zh) * | 2015-07-28 | 2018-10-26 | 李睿 | 一种用于触控屏的防误触方法及系统 |
| US10394393B2 (en) * | 2015-10-09 | 2019-08-27 | Synaptics Incorporated | Compensating force baseline artifacts in a capacitive sensor |
| TWI593943B (zh) * | 2015-10-19 | 2017-08-01 | 國立清華大學 | 可調變的感測元件 |
| US10942596B2 (en) * | 2016-10-03 | 2021-03-09 | Carnegie Mellon University | Touch-sensing system |
| DE102016124485A1 (de) * | 2016-12-15 | 2018-06-21 | Valeo Schalter Und Sensoren Gmbh | Bedienvorrichtung mit einer ersten und einer zweiten kapazitiven Messeinheit, Kraftfahrzeug, sowie Verfahren zum Betreiben einer Bedienvorrichtung |
| US10288658B2 (en) * | 2017-02-02 | 2019-05-14 | Texas Instruments Incorporated | Enhancing sensitivity and robustness of mechanical rotation and position detection with capacitive sensors |
| US10572087B2 (en) * | 2017-07-27 | 2020-02-25 | Cirque Corporation | Self-capacitence sensor and sensor array sensitivity calibration method using secondary mutual capacitence measurements |
| US10725549B2 (en) * | 2018-03-29 | 2020-07-28 | Cirrus Logic, Inc. | Efficient detection of human machine interface interaction using a resonant phase sensing system |
| US20190354815A1 (en) * | 2018-05-15 | 2019-11-21 | Palo Alto Investors LP | Homeostatic Capacity Evaluation of Artificial Intelligence Systems |
| WO2021041733A1 (en) * | 2019-08-27 | 2021-03-04 | Lutron Technology Company Llc | Load control device having a capacitive touch surface |
| KR102325726B1 (ko) * | 2020-02-27 | 2021-11-12 | 주식회사 카프마이크로 | 전계변화 감지를 이용한 물체 감지 장치 및 이를 위한 센서 유닛 |
| CN111399645B (zh) * | 2020-03-13 | 2023-07-25 | Oppo广东移动通信有限公司 | 可穿戴设备及触觉反馈方法、装置、存储介质 |
| CN115698650A (zh) | 2020-06-02 | 2023-02-03 | 微芯片技术股份有限公司 | 利用差分值指示的电容感测 |
| KR102534265B1 (ko) * | 2021-01-27 | 2023-05-17 | 고려대학교 산학협력단 | 정전용량형 센서 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011005977A2 (en) * | 2009-07-10 | 2011-01-13 | Apple Inc. | Touch and hover sensing |
| CN101958090A (zh) * | 2009-07-21 | 2011-01-26 | 上海天马微电子有限公司 | 触摸检测电路以及触摸检测方法 |
| CN102084326A (zh) * | 2008-05-14 | 2011-06-01 | 3M创新有限公司 | 评估多个触摸输入的位置的系统和方法 |
| CN102239461A (zh) * | 2008-09-26 | 2011-11-09 | 苹果公司 | 用于触摸面板的差分感测 |
| CN102362250A (zh) * | 2009-03-25 | 2012-02-22 | 阿尔申蒂斯有限责任公司 | 用于确定触摸输入的装置和方法 |
Family Cites Families (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4766368A (en) | 1986-09-30 | 1988-08-23 | Cox Harold A | Capacitive sensor |
| US5543588A (en) * | 1992-06-08 | 1996-08-06 | Synaptics, Incorporated | Touch pad driven handheld computing device |
| GB9422911D0 (en) * | 1994-11-14 | 1995-01-04 | Moonstone Technology Ltd | Capacitive touch detectors |
| EP1456739A2 (de) * | 2001-12-14 | 2004-09-15 | Infineon Technologies AG | Keypad in textilien mit kapazativer ausleseschaltung |
| US7009663B2 (en) * | 2003-12-17 | 2006-03-07 | Planar Systems, Inc. | Integrated optical light sensitive active matrix liquid crystal display |
| JP2005030901A (ja) * | 2003-07-11 | 2005-02-03 | Alps Electric Co Ltd | 容量センサ |
| JP4651355B2 (ja) * | 2004-10-27 | 2011-03-16 | 京セラ株式会社 | 可変容量コンデンサ |
| US7567240B2 (en) * | 2005-05-31 | 2009-07-28 | 3M Innovative Properties Company | Detection of and compensation for stray capacitance in capacitive touch sensors |
| TWI269214B (en) * | 2005-06-08 | 2006-12-21 | Elan Microelectronics Corp | Object-detecting method of capacitive touch panel |
| US8111243B2 (en) | 2006-03-30 | 2012-02-07 | Cypress Semiconductor Corporation | Apparatus and method for recognizing a tap gesture on a touch sensing device |
| US8040142B1 (en) * | 2006-03-31 | 2011-10-18 | Cypress Semiconductor Corporation | Touch detection techniques for capacitive touch sense systems |
| WO2007146785A2 (en) * | 2006-06-09 | 2007-12-21 | Apple Inc. | Touch screen liquid crystal display |
| US20080238448A1 (en) * | 2007-03-30 | 2008-10-02 | Cypress Semiconductor Corporation | Capacitance sensing for percussion instruments and methods therefor |
| US7920134B2 (en) | 2007-06-13 | 2011-04-05 | Apple Inc. | Periodic sensor autocalibration and emulation by varying stimulus level |
| JP5158493B2 (ja) * | 2008-03-26 | 2013-03-06 | Toto株式会社 | タッチスイッチ検出装置及びそれを用いた給水装置 |
| TWI385567B (zh) * | 2008-12-30 | 2013-02-11 | Univ Nat Chiao Tung | 電容式觸控面板 |
| JP5281551B2 (ja) | 2009-02-20 | 2013-09-04 | アルプス電気株式会社 | 静電容量式入力装置 |
| US20100295813A1 (en) * | 2009-05-22 | 2010-11-25 | Tyco Electronics Corporation | System and method for a projected capacitive touchscreen having grouped electrodes |
| CN101907922B (zh) * | 2009-06-04 | 2015-02-04 | 新励科技(深圳)有限公司 | 一种触感触控系统 |
| US9069405B2 (en) * | 2009-07-28 | 2015-06-30 | Cypress Semiconductor Corporation | Dynamic mode switching for fast touch response |
| TWI405108B (zh) * | 2009-10-09 | 2013-08-11 | Egalax Empia Technology Inc | 分析位置的方法與裝置 |
| US8773366B2 (en) | 2009-11-16 | 2014-07-08 | 3M Innovative Properties Company | Touch sensitive device using threshold voltage signal |
| JP5123370B2 (ja) * | 2010-01-28 | 2013-01-23 | 富士フイルム株式会社 | 導電シート、導電シートの使用方法及び静電容量方式タッチパネル |
| JP5264800B2 (ja) * | 2010-02-23 | 2013-08-14 | パナソニック株式会社 | タッチパネル装置 |
| JP5427648B2 (ja) * | 2010-03-02 | 2014-02-26 | 株式会社ジャパンディスプレイ | 座標入力装置、およびそれを備えた表示装置 |
| JP5540797B2 (ja) * | 2010-03-19 | 2014-07-02 | ソニー株式会社 | センサ装置および表示装置 |
| WO2011133605A1 (en) * | 2010-04-19 | 2011-10-27 | Tactus Technology | Method of actuating a tactile interface layer |
| US8933907B2 (en) | 2010-04-30 | 2015-01-13 | Microchip Technology Incorporated | Capacitive touch system using both self and mutual capacitance |
| JP5396333B2 (ja) * | 2010-05-17 | 2014-01-22 | パナソニック株式会社 | タッチパネル装置 |
| KR20120010795A (ko) * | 2010-07-27 | 2012-02-06 | 삼성전기주식회사 | 터치패널 일체형 전자종이 |
| US8717331B2 (en) * | 2010-08-24 | 2014-05-06 | Cypress Semiconductor Corporation | Reducing water influence on a touch-sensing device |
| JP5768347B2 (ja) * | 2010-09-07 | 2015-08-26 | ソニー株式会社 | 情報処理装置、情報処理方法およびコンピュータプログラム |
| US10013058B2 (en) * | 2010-09-21 | 2018-07-03 | Apple Inc. | Touch-based user interface with haptic feedback |
| JP5606242B2 (ja) * | 2010-09-24 | 2014-10-15 | 株式会社ジャパンディスプレイ | 表示装置 |
| JP5667824B2 (ja) * | 2010-09-24 | 2015-02-12 | 株式会社ジャパンディスプレイ | タッチ検出装置およびその駆動方法、タッチ検出機能付き表示装置、ならびに電子機器 |
| JP5839173B2 (ja) * | 2010-10-14 | 2016-01-06 | Nltテクノロジー株式会社 | タッチセンサ装置及び電子機器 |
| US20120090757A1 (en) * | 2010-10-18 | 2012-04-19 | Qualcomm Mems Technologies, Inc. | Fabrication of touch, handwriting and fingerprint sensor |
| US8907867B2 (en) * | 2012-03-21 | 2014-12-09 | Google Inc. | Don and doff sensing using capacitive sensors |
-
2013
- 2013-04-26 US US14/396,794 patent/US10248264B2/en active Active
- 2013-04-26 EP EP13780865.5A patent/EP2842020A4/en active Pending
- 2013-04-26 AU AU2013251459A patent/AU2013251459A1/en not_active Abandoned
- 2013-04-26 KR KR1020147033227A patent/KR102262597B1/ko active IP Right Grant
- 2013-04-26 CN CN201810058790.7A patent/CN108646937B/zh active Active
- 2013-04-26 KR KR1020217016968A patent/KR20210068626A/ko active Application Filing
- 2013-04-26 KR KR1020227036281A patent/KR20220145425A/ko not_active Application Discontinuation
- 2013-04-26 CN CN201380033387.4A patent/CN104603729B/zh not_active Expired - Fee Related
- 2013-04-26 CA CA2871246A patent/CA2871246A1/en not_active Abandoned
- 2013-04-26 SG SG11201406896WA patent/SG11201406896WA/en unknown
- 2013-04-26 WO PCT/US2013/038323 patent/WO2013163496A2/en active Application Filing
- 2013-04-26 JP JP2015509162A patent/JP2015518218A/ja not_active Withdrawn
-
2018
- 2018-05-16 JP JP2018094686A patent/JP2018139146A/ja not_active Withdrawn
- 2018-08-13 AU AU2018217209A patent/AU2018217209A1/en not_active Abandoned
-
2019
- 2019-04-01 US US16/372,134 patent/US20190369771A1/en not_active Abandoned
-
2020
- 2020-08-28 AU AU2020223778A patent/AU2020223778A1/en not_active Abandoned
- 2020-10-09 JP JP2020171395A patent/JP2021009722A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102084326A (zh) * | 2008-05-14 | 2011-06-01 | 3M创新有限公司 | 评估多个触摸输入的位置的系统和方法 |
| CN102239461A (zh) * | 2008-09-26 | 2011-11-09 | 苹果公司 | 用于触摸面板的差分感测 |
| CN102362250A (zh) * | 2009-03-25 | 2012-02-22 | 阿尔申蒂斯有限责任公司 | 用于确定触摸输入的装置和方法 |
| WO2011005977A2 (en) * | 2009-07-10 | 2011-01-13 | Apple Inc. | Touch and hover sensing |
| CN101958090A (zh) * | 2009-07-21 | 2011-01-26 | 上海天马微电子有限公司 | 触摸检测电路以及触摸检测方法 |
Non-Patent Citations (1)
| Title |
|---|
| 触摸控制中高精度低功耗SAR-ADC的研究与设计;贺黉胤;《中国优秀硕士学位论文全文数据库 信息科技辑》;20100515;第I135-201页 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN104603729B (zh) | 2018-02-02 |
| CN108646937A (zh) | 2018-10-12 |
| KR20150023303A (ko) | 2015-03-05 |
| US20150301646A1 (en) | 2015-10-22 |
| CA2871246A1 (en) | 2013-10-31 |
| US10248264B2 (en) | 2019-04-02 |
| KR20220145425A (ko) | 2022-10-28 |
| US20190369771A1 (en) | 2019-12-05 |
| AU2018217209A1 (en) | 2018-08-30 |
| KR102262597B1 (ko) | 2021-06-09 |
| SG11201406896WA (en) | 2014-11-27 |
| KR20210068626A (ko) | 2021-06-09 |
| JP2015518218A (ja) | 2015-06-25 |
| JP2018139146A (ja) | 2018-09-06 |
| WO2013163496A3 (en) | 2013-12-19 |
| CN104603729A (zh) | 2015-05-06 |
| AU2013251459A1 (en) | 2014-11-20 |
| JP2021009722A (ja) | 2021-01-28 |
| WO2013163496A2 (en) | 2013-10-31 |
| EP2842020A4 (en) | 2016-10-12 |
| AU2020223778A1 (en) | 2020-09-17 |
| EP2842020A2 (en) | 2015-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108646937B (zh) | 用于确定触摸输入刺激的装置 | |
| US9201559B2 (en) | Method of operating a multi-zone input device | |
| TWI469022B (zh) | 電容性觸控式螢幕系統以及偵測電容性觸控式螢幕系統上之觸摸的方法 | |
| US8674950B2 (en) | Dual-sensing-mode touch-sensor device | |
| JP5106268B2 (ja) | タッチパネル | |
| US8717302B1 (en) | Apparatus and method for recognizing a gesture on a sensing device | |
| JP6074408B2 (ja) | タッチセンシティブスクリーン | |
| US20140354577A1 (en) | Multi-State Capacitive Button | |
| EP2575012A2 (en) | Predictive touch surface scanning | |
| WO2010045067A2 (en) | Sensor device and method with at surface object sensing and away from surface object sensing | |
| TW201023012A (en) | Capacitive touch sensors | |
| TW201841100A (zh) | 具有陣列電極之觸控面板之可辨識控制器及驅動方法 | |
| CN108376039B (zh) | 将信号施加到触摸传感器 | |
| WO2017029860A1 (ja) | 静電容量式入力装置 | |
| KR20150087714A (ko) | 터치패널 및 이를 포함하는 터치스크린 장치 | |
| CN107239173B (zh) | 触控装置、触控显示装置及其驱动方法 | |
| CN107315450B (zh) | 用于确定使用者的手与电子设备的壳体之间的关系的触摸屏控制器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |