CN102046100B - 用于高速腔内斑块旋磨装置的偏心研磨和切割头 - Google Patents
用于高速腔内斑块旋磨装置的偏心研磨和切割头 Download PDFInfo
- Publication number
- CN102046100B CN102046100B CN200980119846.4A CN200980119846A CN102046100B CN 102046100 B CN102046100 B CN 102046100B CN 200980119846 A CN200980119846 A CN 200980119846A CN 102046100 B CN102046100 B CN 102046100B
- Authority
- CN
- China
- Prior art keywords
- driving shaft
- rubbing device
- turning cylinder
- rotary rubbing
- grinding head
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 claims description 16
- 230000008569 process Effects 0.000 claims description 11
- 230000003068 static effect Effects 0.000 claims description 7
- 230000015572 biosynthetic process Effects 0.000 claims description 4
- 210000001367 artery Anatomy 0.000 claims 1
- 238000001361 intraarterial administration Methods 0.000 claims 1
- 230000000149 penetrating effect Effects 0.000 claims 1
- 239000000463 material Substances 0.000 abstract description 17
- 230000002966 stenotic effect Effects 0.000 abstract description 15
- 230000033001 locomotion Effects 0.000 abstract description 5
- 208000031481 Pathologic Constriction Diseases 0.000 abstract description 4
- 230000003902 lesion Effects 0.000 abstract description 3
- 230000036262 stenosis Effects 0.000 abstract description 3
- 208000037804 stenosis Diseases 0.000 abstract description 3
- 208000014674 injury Diseases 0.000 abstract 1
- 230000000284 resting effect Effects 0.000 abstract 1
- 230000008733 trauma Effects 0.000 abstract 1
- 238000005516 engineering process Methods 0.000 description 15
- 230000006378 damage Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 7
- 238000002399 angioplasty Methods 0.000 description 6
- 238000013461 design Methods 0.000 description 6
- 208000037260 Atherosclerotic Plaque Diseases 0.000 description 5
- 239000011230 binding agent Substances 0.000 description 5
- 239000008280 blood Substances 0.000 description 5
- 210000004369 blood Anatomy 0.000 description 5
- 239000008187 granular material Substances 0.000 description 5
- 239000007788 liquid Substances 0.000 description 5
- 230000009286 beneficial effect Effects 0.000 description 4
- 239000010432 diamond Substances 0.000 description 4
- 229910003460 diamond Inorganic materials 0.000 description 4
- 230000036285 pathological change Effects 0.000 description 4
- PNEYBMLMFCGWSK-UHFFFAOYSA-N Alumina Chemical compound [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 3
- 239000006061 abrasive grain Substances 0.000 description 3
- 238000005452 bending Methods 0.000 description 3
- 231100000915 pathological change Toxicity 0.000 description 3
- 230000005855 radiation Effects 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 239000007787 solid Substances 0.000 description 3
- 206010003210 Arteriosclerosis Diseases 0.000 description 2
- 230000002308 calcification Effects 0.000 description 2
- HVYWMOMLDIMFJA-DPAQBDIFSA-N cholesterol Chemical compound C1C=C2C[C@@H](O)CC[C@]2(C)[C@@H]2[C@@H]1[C@@H]1CC[C@H]([C@H](C)CCCC(C)C)[C@@]1(C)CC2 HVYWMOMLDIMFJA-DPAQBDIFSA-N 0.000 description 2
- 239000011248 coating agent Substances 0.000 description 2
- 238000000576 coating method Methods 0.000 description 2
- 239000002826 coolant Substances 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000007943 implant Substances 0.000 description 2
- 238000002513 implantation Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000002045 lasting effect Effects 0.000 description 2
- 239000010410 layer Substances 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 231100000241 scar Toxicity 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- 206010002383 Angina Pectoris Diseases 0.000 description 1
- 206010003211 Arteriosclerosis coronary artery Diseases 0.000 description 1
- 206010008190 Cerebrovascular accident Diseases 0.000 description 1
- 206010020772 Hypertension Diseases 0.000 description 1
- 208000000501 Lipidoses Diseases 0.000 description 1
- 206010024585 Lipidosis Diseases 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 208000006011 Stroke Diseases 0.000 description 1
- NRTOMJZYCJJWKI-UHFFFAOYSA-N Titanium nitride Chemical compound [Ti]#N NRTOMJZYCJJWKI-UHFFFAOYSA-N 0.000 description 1
- 230000008485 antagonism Effects 0.000 description 1
- 230000003143 atherosclerotic effect Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 230000017531 blood circulation Effects 0.000 description 1
- 210000004027 cell Anatomy 0.000 description 1
- 229910010293 ceramic material Inorganic materials 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 235000012000 cholesterol Nutrition 0.000 description 1
- 239000012141 concentrate Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000007812 deficiency Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 230000001815 facial effect Effects 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000003607 modifier Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 208000010125 myocardial infarction Diseases 0.000 description 1
- 230000037361 pathway Effects 0.000 description 1
- 230000035699 permeability Effects 0.000 description 1
- 238000007747 plating Methods 0.000 description 1
- 230000000750 progressive effect Effects 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 208000037803 restenosis Diseases 0.000 description 1
- 238000007788 roughening Methods 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 239000011780 sodium chloride Substances 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 238000007920 subcutaneous administration Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 239000002344 surface layer Substances 0.000 description 1
- 210000003684 theca cell Anatomy 0.000 description 1
- 230000025366 tissue development Effects 0.000 description 1
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 1
- 239000010937 tungsten Substances 0.000 description 1
- 229910052721 tungsten Inorganic materials 0.000 description 1
- UONOETXJSWQNOL-UHFFFAOYSA-N tungsten carbide Chemical compound [W+]#[C-] UONOETXJSWQNOL-UHFFFAOYSA-N 0.000 description 1
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320016—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes
- A61B17/32002—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes with continuously rotating, oscillating or reciprocating cutting instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/3205—Excision instruments
- A61B17/3207—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions
- A61B17/320758—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions with a rotating cutting instrument, e.g. motor driven
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B2017/320004—Surgical cutting instruments abrasive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/3205—Excision instruments
- A61B17/3207—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions
- A61B17/320758—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions with a rotating cutting instrument, e.g. motor driven
- A61B2017/320766—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions with a rotating cutting instrument, e.g. motor driven eccentric
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Vascular Medicine (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Surgical Instruments (AREA)
Abstract
本发明以多个实施例提供了腔内斑块旋磨装置,装置具有柔性的、细长的、可旋转的驱动轴,驱动轴至少具有一个固定在其上的柔性或非柔性的偏心膨大研磨和切割头,以构成研磨面。当置于狭窄组织并高速旋转时,研磨和切割头的偏心特性沿轨道移动,打开病变到比膨大研磨和切割头静止直径大的直径。优选的,研磨和切割头的质心辐射状分布在驱动轴的转动轴周围,以利于装置沿轨道运动。研磨和切割头含有利于切割难去除的狭窄物质并将对管壁损伤降至最低的近端和/或末端倒圆面。
Description
技术领域
本发明涉及用于从体内通道中清除组织的装置和方法,比如使用高速腔内斑块旋磨装置从动脉中清除动脉粥样硬化斑。
背景技术
已经开发了多种用于去除或修复动脉和类似身体通路组织的技术和仪器。这种技术和仪器的一个常用目的是去除患者动脉内的动脉粥样硬化斑。动脉粥样硬化的特征在于患者血管内膜层(内皮下)的脂肪沉积(动脉粥样化)的增长。通常随着时间,开始淀积的是相对软的、富胆固醇的动脉粥样化物质,逐渐硬化为钙化动脉粥样硬化斑。这种动脉粥样化限制了血液的流动,因此通常被称为狭窄性病变(stenoticlesions)或狭窄(stenoses),阻塞物被称为致狭窄物。如未作处理,这种狭窄将引起心绞痛、高血压、心肌梗死、中风等。
旋磨术已经成为了清除这种致狭窄物的常规技术。这种手术最常用于冠状动脉钙化损害通道的打开。大多数情况下,内腔旋磨术并不单独使用,而是伴随有气囊血管成形术(balloon angioplasty),气囊血管成形术后,通常又伴随着支架的植入以辅助维持打开的动脉的开放。对非钙化损害,气囊血管成形术大多数情况下被单独用于打开动脉,通常植入支架以维持打开的动脉的开放。然而,已有研究显示,相当大比例接受气囊血管成形术并在动脉中植入支架的患者会经历支架再狭窄--即大多数情况下是一段时间后支架内的瘢痕组织发展引起的是支架的阻塞。在这种情况下,在支架之内的气囊血管成形术并不是十分有效,如此腔内斑块旋磨术在从支架清除额外的瘢痕组织,以恢复动脉的通透性的优选程序。
已经开发出几种用于清除致狭窄物的腔内斑块旋磨装置。其中一类装置,如美国专利4990134(Auth)所述,一种覆有研磨材料的磨锥,例如钻石颗粒,该磨锥装配在柔性驱动轴的末端。在推进穿过狭窄时,磨锥以高速(一般的,如大约在150000-190000 rpm的范围内)旋转。但是在锥清除致狭窄组织时,磨锥会阻断血流。一旦磨锥被推进穿过狭窄,动脉将被打开,其直径等于或稍大于磨锥的最大外径。通常,需要使用超过一种尺寸的磨锥以将动脉打开到所需直径。
美国专利5314438(Shturman)公开了另一种腔内斑块旋磨装置,该装置具有驱动轴,驱动轴的一段具有膨大的直径,膨大表面的至少一部分覆盖有研磨材料以形成驱动轴的研磨部。高速旋转时,研磨部可以从动脉中清除致狭窄组织。尽管这种腔内斑块旋磨装置由于其具有柔性,相对Auth的装置具有一些优点,由于装置本质上不是偏心的,它也仅能将动脉打开到与驱动轴的膨大研磨表面直径相当的直径。
美国专利6494890(Shturman)公开了一种已知的腔内斑块旋磨装置,装置具有驱动轴,驱动轴具有偏心膨大部,其中膨大部的至少一部分覆盖有研磨材料。高速旋转时,研磨部可以从动脉中清除致狭窄组织。装置可以将动脉打开到大于偏心膨大部静止直径的直径,部分原因是高速操作中的轨道旋转。因为偏心膨大部包括未粘合在一起的驱动轴线,驱动轴的偏心膨大部在植入狭窄内或在高速操作的过程中可以弯曲。这种弯曲使得在高速操作过程中,可以打开更大的直径,但是动脉实际磨去的直径所需的控制更少。此外,一些致狭窄组织可以完全堵塞通路,以致Shturman的装置不能穿过置入。因为Shturman要求驱动轴的偏心膨大部置于致狭窄组织之内以实现研磨,如果偏心膨大部不能移动至狭窄中,其效果将降低。美国专利6494890公开的内容在这里整体作为参考引入。
美国专利5681336(Clement)公开了一种已知的偏心的,其外表面部分设有通过适当的粘合剂固定的研磨粒组织清除锥。这种结构是有限的,但是因为,如Clement在第3栏53-55行所说明的,非对称的锥以“比高速旋磨装置低的速度”旋转,“以抵消热和失衡”。也就是说,对于给定尺寸和质量二者的实心锥,不可能以在腔内斑块旋磨操作时使用的高速,即以20000-200000 rpm的转速范围内旋转锥。更为重要的是,驱动轴的转动轴质心的偏离将导致显著的,并且是不需要的离心力的形成,从而对动脉壁产生过大的压力,以及并形成过多的热和过大的颗粒。
普通受让的专利申请序列号为US 11/761128,名称为Eccentric Abrading Head for Head for High-Speed Rotational Atherectomy Devices的专利申请,公开了一些具有偏心研磨头的实施例。特别的,该专利申请(序列号US11/761128)公开了一种柔性的、细长的、可旋转的驱动轴,驱动轴上连接至少一个柔性的,或非柔性的偏心膨大研磨头,偏心膨大切割头的至少一部分具有组织清除面—通常为研磨面。某些实施例中,研磨头至少部分空心。当相对致狭窄组织放置在动脉中并以足够的高速旋转时,膨大切割头的偏心本质引起切割头和驱动轴以这种方式旋转以将狭窄病变打开到基本大于膨大切割头外径的直径。优选的,偏心膨大切割头的质心辐射分布在驱动轴的转动轴周围,以利于装置在高速操作时,将狭窄病变打开到基本大于膨大切割头外径的直径。
在申请序列号为11/761128的专利申请中公开的偏心研磨头包括近端、远端和中间面。每个公开的近端和远端面为具有基本上垂直于连接装置的驱动轴的前边沿。这种凸边表面使得更难以在不破坏管壁的情况下通过狭窄,可在此基础上进行改进。申请序列号11/761128公开的内容在此作为参考全文引入,因为它公开了上述的特征。
本发明要克服这些不足,并提供,特别是上述的提及的改进。
发明内容
本发明提供一种腔内斑块旋磨装置,在多个实施例中,具有柔性的、细长的、可旋转的驱动轴,驱动轴上固定有至少一个柔性的或非柔性的偏心膨大研磨和切割头。在置于狭窄组织并高速旋转时,研磨和切割头的偏心特性使其沿着轨道移动,将病变打开到大于膨大研磨和切割头静止直径的直径。优选的,研磨和切割头的质心辐射状分布在驱动轴的转动轴周围,以利于装置沿轨道运动。研磨和切割头包括有利于切割难去除的狭窄物质并将对管壁伤害降至最低的近端和/或远端倒圆面。
本发明的一个目的在于提供一种高速腔内斑块旋磨装置,装置具有至少一个至少部分柔性的偏心研磨和切割头,偏心研磨和切割头具有至少一个用于研磨的研磨面以及近端或远端倒圆边缘,以便于在进入狭窄的同时最少损伤管壁。
本发明的另一个目的在于提供一种高速腔内斑块旋磨装置,装置具有至少一个至少非柔性的偏心研磨和切割头,偏心研磨和切割头具有至少一个用于研磨的研磨面以及近端或远端倒圆边缘,以便于在进入狭窄的同时最少损伤管壁。
本发明的另一个目的是提供一种高速腔内斑块旋磨装置,装置具有至少一个至少部分柔性的,边缘倒圆的偏心研磨和切割头以便于在进入狭窄的同时最小损伤管壁,并使得静止直径小于其高速旋转直径。
本发明的另一个目的是提供一种高速腔内斑块旋磨装置,装置具有至少一个非柔性的,边缘倒圆的偏心研磨和切割头以便于在进入狭窄的同时最小损伤管壁,并使得静止直径小于其高速旋转直径。
本发明的另一个目的是提供一种高速腔内斑块旋磨装置,装置具有至少一个部分柔性的偏心研磨和切割头,研磨和切割头具有倒圆的近端和/或远端边缘,并能够在几乎或完全封闭目标血管的狭窄处以最小的损伤打开导向孔。
本发明的另一个目的是提供一种高速腔内斑块旋磨装置,装置具有至少一个非柔性的偏心研磨和切割头,研磨和切割头具有倒圆的近端和/或远端边缘,并能够在几乎或完全封闭目标血管的狭窄处以最小的损伤打开导向孔。
本发明的另一个目的是提供一种高速腔内斑块旋磨装置,装置具有至少一个柔性的,近端和/或远端边缘倒圆的偏心研磨和切割头,在插入和定位的过程中弯曲,提供一种增强的,最少损伤的控制弯曲腔的能力。
本发明的另一个目的是提供一种高速腔内斑块旋磨装置,装置具有至少一个非柔性的,近端和/或远端边缘倒圆的研磨和偏心切割头,在定位和高速旋转操作中不弯曲。
图及其后的详细说明更为具体的示例性说明本发明的所有实施例。
附图说明
通过下述本发明的各种实施例的详细描述及相关附图可以更充分的理解本发明。
图1是一种包括本发明的非柔性的偏心切割头实施例的腔内斑块旋磨装置和系统的透视图;
图2是在先技术中由驱动轴形成的柔性偏心切割头的拆开透视图;
图3是由驱动轴构成的偏心切割头在先技术的拆开纵向截面图;
图4是显示在先技术中由驱动轴构成的柔性偏心膨大切割头的柔性的拆开纵向截面图;
图5是在先技术中实心的并且是非柔性的,固定于驱动轴的偏心研磨锥的纵向截面图;
图6是在先技术中具有锐利近端和远端边缘的研磨头的拆开纵向截面图;
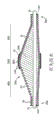
图7是本发明一个实施例的透视图;
图8是本发明一个实施例的侧视图;
图9是本发明一个实施例的仰视图;
图10是本发明一个实施例的拆开截面图;
图11是显示本发明一个实施例几何特征的拆开纵向截面图;
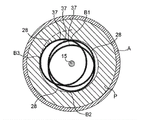
图12A-12C是本发明一个实施例的偏心切割头的横向截面图;
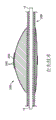
图13是显示本发明一个实施例的切割头在基本上已经使用装置打开狭窄后,在静止(非旋转)位置的纵向截面图;
图14是显示本发明偏心腔内斑块旋磨装置快速旋转的偏心膨大切割头三个不同位置的横向截面图;
图15显示的是如图14所示的本发明的偏心腔内斑块旋磨装置快速旋转的偏心膨大切割头的三个不同位置的原理图;
图16是本发明整合有柔性缝的一个实施例的拆开侧视图。
具体实施方式
由于本发明具有多种合理的改动或替换,因此,本文通过提供附图并详细描述以展示本发明的细节。但是,应当注意的是,其意图并不是用于限制发明为具体描述的实施例。相反的,其意图是覆盖在本发明构思和范围内的所有改动、等同和替换。
图1显示了共同受让的美国专利申请(序列号11/761128)公开的腔内斑块旋磨装置的一个实施例。该装置包括持手部10,细长的、柔性的驱动轴20,驱动轴20具有偏心膨大研磨头28,以及从持手部10远端延伸出的细长的导管13。如本领域技术人员所知的,驱动轴20由螺旋盘绕的线构成,研磨头28固定在其上。进一步的,对本发明考虑到的各种驱动轴的实施例而言,如本领域技术人员所知的,驱动轴的螺旋盘绕线可含有少至3根线或多至15根线,可能为右手或左手弯曲。导管13具有腔,其中容纳有驱动轴20的大部分长度,除了膨大研磨头28和膨大研磨头28远端短部件。驱动轴20同样含有一内腔,使得驱动轴20可沿着导线15推进和旋转。可设置液体补给线17以将冷却和润滑液(一般为盐水或另一种生物相容的液体)引入导管13。
持手部10优选包含涡轮(或类似的旋转驱动机构),以高速旋转驱动轴20。持手部10一般可连接到动力源,比如通过管16输送的压缩空气。也可设置纤维光缆对25以监测涡轮和驱动轴20的转速。与这种持手部及相关装置的细节是本领域所熟知的,并描述在例如授权给Auth的美国专利5314407。持手部10还优选包括控制按钮11,以相对导管13和持手部壳体推进和缩回涡轮和驱动轴20。
图2-4显示了在先技术中包括驱动轴20A的偏心膨大直径研磨部28A的细节。驱动轴20A包括一个或多个螺旋弯曲线18,限定了导线腔19A和在膨大研磨部28A中的空凹25A。除了导线15穿过空凹25A之外,空凹25A基本上是空的。相对狭窄的位置,偏心膨大直径研磨部28A包括,近端30A、中部35A和远端40A。偏心膨大直径部28A的近端30A的线圈31的直径优选逐步基本以恒定比率向远端增大,如此大致形成圆锥的形状。远端40A的线圈41优选具有基本以恒速逐步减少的直径,因此一般形成圆锥体形。中部35的线圈36设有逐步变化的直径,以提供通常为凸状的外表面,外表面被塑形以在驱动轴20A的膨大偏心直径部28A的近端和远端锥形部分之间提供平滑过渡。
继续参照在先技术的图2-4,驱动轴28A的偏心膨大直径研磨部的至少部分(优选中部35A)包括可清除组织的外表面。组织清除表面37包括用以限定驱动轴20A的组织清除节的研磨材料涂层24A,如图所示,研磨材料涂层24A直接通过合适的粘合剂26A附着在驱动轴20A的线圈上。
图4显示了在先技术的驱动轴28A的偏心膨大直径研磨部的柔性,显示了沿着导线15推进的驱动轴20A。在实施例中显示,驱动轴的偏心膨大直径研磨部的中部35A上的相邻线圈彼此固定在一起,通过粘合剂26A粘合将研磨颗粒24A固定在线圈36上。驱动轴的偏心膨大直径部的近端部30A和远端部40A分别由线圈31和41构成,线圈彼此不固定,这样使得驱动轴的这些部分可以弯曲,如图所示。这种柔性促进了装置在通过相对曲折通路时的推进,在一些实施例,偏心膨大直径研磨部28A在高速旋转中旋转弯曲。作为替换,驱动轴的偏心膨大直径研磨部28A中部35A的相邻线圈36可彼此固定,以此限制研磨部28A的柔性。
图5显示了另一种在先技术的腔内斑块旋磨装置,装置包括固定于柔性驱动轴20B的不对称实心研磨锥28B,沿着如Clement的美国专利US 5681336所提供的导线15旋转。驱动轴20B可以是柔性的,但是,不对称的实心研磨锥28B是非柔性的。偏心组织清除锥28B的部分外表面通过合适的粘合剂26B固定有研磨颗粒层24B。这种结构的用途是有限的,但是因为,如Clement在第3栏53-55行所说明的,非对称的锥以“比高速旋磨装置低的速度”旋转,“以抵消热和失衡”。也就是说,对于给定尺寸和质量二者的实心锥,不可能以在腔内斑块旋磨操作时使用的高速,如在20000-200000 rpm的转速范围内旋转锥。更为重要的是,驱动轴的转动轴质心的偏离将导致显著的,并且是不需要的离心力的形成,对动脉壁产生过大的压力,并产生过多的热和过大的颗粒。
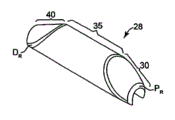
图6显示了公开在共同受让的美国专利申请(序列号11/761128)中的偏心膨大研磨头28C的又一个实施例。在这一实施例,如图所示,驱动轴20以两个分离的部分固定于研磨头28C,其间有一缺口,偏心研磨头28固定于驱动轴的两个部分。作为替换,驱动轴20可以是整体构建的。图示的近端部30和远端部40基本上是等长的,其间设置有中部35。图示的近端部前边沿30A和远端部前边沿40A基本上垂直于驱动轴20,因此形成了硬并锐利的边E。在高速旋转过程中,这种硬并锐利的边可引起管壁的损伤,这是一种非常不期望的结果。
现在转到图7-11,将论述本发明腔内斑块旋磨装置的非柔性的,偏心膨大研磨头28的一个实施例。研磨头28可包括至少一个位于中部35、远端部40和/或近端部30外表面的组织清除表面37,以促进狭窄在高速旋转过程中的磨损。组织清除表面37可包括结合在研磨头28中部35、远端部40和/或近端部30的研磨材料层24。研磨材料可以是任何适当的材料,比如金刚石粉末、熔融石英、氮化钛、碳化钨、氧化铝、碳化硼,或其他陶瓷材料。优选的研磨材料由金刚石片(或金刚石粉末颗粒)构成通过适当的粘合剂直接固定在驱动轴20的线圈,这种固定可以通过使用熟知的技术,如传统的电镀或熔合技术(参见美国专利US 4018576)实现。作为替换,外组织清除表面可由机械或化学糙化中部35,远端部40和/或近端部30的外表面构成,以提供合适的组织研磨清除表面37。另一种替换,外表面通过蚀刻或切割(如,通过激光),以提供一种小但有效的研磨面。其他类似的技术也可用于提供一个适当的组织清除表面37。
最佳方案如图9和10所示,至少部分封闭的腔或缝23可设置为纵向沿着驱动轴20的转动轴21穿过膨大研磨头28,以将研磨头28按本领域技术人员所熟知的技术固定到驱动轴20。在各种实施例中,可设置空腔25以减小并控制研磨头28的质量(以及质心相对于驱动轴的转动轴21的位置),以利于抗损伤研磨,并提高研磨头28在高速,如20000到200000 rpm的操作过程中轨迹控制的可预测性。如本领域技术人员将认识到的,轨道振幅将可被预测地操作,其基础是质心相对于驱动轴的转动轴的位置。因此,与较小的空腔25(或没有空腔25)相比,更大的空腔25的存在将使质心移动更接近转动轴21,在给定的转速下,将引起更小的轨道振幅和/或研磨头28在高速旋转过程中产生的直径。
图7-11中的每一幅都显示了倒圆的近端边缘和远端边缘PR、DR。近端边缘和远端边缘PR、DR的圆形本质有利于逐渐进入狭窄,与此同时最小化对管壁的共同损伤。如本领域技术人员可轻易认识到的,近端边缘和远端边缘PR、DR可能具有多种半径,所有这些半径都是本发明的范围之内。图中所示实施例包括具有相等半径的倒圆边缘,但是近端边缘和远端边缘PR、DR也可包括不等半径。此外,在其他实施例,研磨头可含有近端倒圆边缘而远端表面不是倒圆的。更进一步,远端边缘可以是倒圆的而近端表面不是。
在图示的实施例中,研磨头28可以固定在驱动轴20上,其中驱动轴由一个单元构成。作为替换,如以下将要论述的,驱动轴20可由两个分离的片构成,其中膨大偏心研磨头28固定于驱动轴20的两个片上,其间有一缺口。这种两片驱动轴的构建技术,可与空腔25相结合,进一步控制研磨头28质心的定位。可以修改空腔25的尺寸和形状以优化研磨头28的轨道旋转路径,特别针对需要的转速。本领域的技术人员将轻易地认识到各种可能的结构,其中的每一个都在本发明的范围之内。
图7-11所示的实施例,近端部30和远端部40具有对称的形状和长度。其他实施例可以延长近端部30或远端部40的长度,以获得不对称的纵向外观。
特别参照图11,驱动轴20具有与导线15共轴的转动轴21,导线15位于驱动轴20的腔19内。因此,偏心膨大研磨头28的近端部30具有的外表面基本由平截圆锥体的外表面限定而成,圆锥体具有以相对小角度β与驱动轴20的转动轴21相交的轴32。类似的,膨大研磨头28的远端部40具有的外表面基本由平截圆锥体的外表面限定而成,圆锥体具有以相对小角度β与驱动轴20的转动轴21相交的轴42。近端部30的锥体轴32和远端部40的锥体轴42彼此相交,与驱动轴的纵向转动轴21共面。
圆锥体的对面一般分别应在约10°到约30°之间的角α;优选的角α在约20°到约24°之间,最佳角α为约22°。同样的,近端部30的锥体轴32和远端部40的锥体轴42一般在约20°到约8°之间的角β与驱动轴20的转动轴21相交。优选的角β在约3°到约6°之间。尽管图示的优选实施例中,膨大研磨头28的远端部和近端部的角α一般相等,但是他们不必相同。这对角β而言也是一样的。
在替换实施例中,中部35可包括从远端部40的相交处到近端部30的相交处逐步增加的直径。在这一实施例,角α,如图6所示,在近端部30可比在远端部40大,或相反。进一步的替换实施例包括具有凸状表面的中部35,其中中部外表面可被塑造以在近端部和远端部的近端部外表面和远端部外表面之间提供平滑过渡。
因为锥体轴32和42以角β与驱动轴20的转动轴21相交,偏心膨大研磨头28的质心因此辐射分布在驱动轴20的纵向转动轴21的四周。如下将要详细描述的,质心偏离驱动轴的旋转轴21使膨大研磨头28具有一定的偏心率,允许其打开动脉到基本上更大的直径,大于偏心膨大研磨头28的名义直径,优选的,打开的直径至少为偏心膨大研磨头28名义直径的两倍。
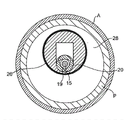
图12A-12C描述了图7-11所示的偏心膨大研磨头28的质心29的3个截面薄片(显示为横向截面),偏心膨大研磨头28固定在驱动轴20上,驱动轴20沿着导线15推进,导线15在驱动轴腔19之内。整个偏心膨大研磨头28可分为许多这样的薄片,每一个薄片都有其质心。图12B选取的是偏心膨大研磨头28具有其最大截面直径的位置(在这一实施例中,它是偏心膨大研磨头28中部35的最大直径),图12A和12C分别是偏心膨大研磨头28的远端40和近端30的截面。在这些截面薄片的每一片中,质心29远离驱动轴20的转动轴21分布,驱动轴20的转动轴与导线15一致。每一个截面薄片的质心29一般也与这种截面薄片的几何中心重合。图12B显示了中部35的截面薄片,包括研磨头28的最大截面直径,与近端部30和远端部40相比,其质心29和几何中心两者都位于最远离(即最大间隔)驱动轴20的转动轴21处。
应当认识到,在本文,用语“偏心”定义为并用于描述膨大研磨头28和驱动轴20的转动轴21之间几何中心的位置差异,或膨大研磨头28和驱动轴20的转动轴21之间质心29的位置差异。任意一种这样的差异,在适当的转速下,将使得偏心膨大研磨头28打开狭窄到基本上大于偏心膨大研磨头28名义直径的直径。此外,对具有不规则几何形状的偏心膨大研磨头28,其“几何中心”大致可以通过定位画经驱动轴的转动轴21的最长弦的中点,并连接其在偏心膨大研磨头28的外周具有最大长度处的横截面上的两点确定。
本发明腔内斑块旋磨装置的研磨头28可由不锈钢、钨或类似的材料制成。研磨头28可由单一的整体片构成,或作为替换,由两个或更多可组装的研磨头部件固定在一起以实现本发明的目的。
本领域的技术人员将认识到在此图示的实施例,包括至少一个如上所述的组织清除表面37。这个组织清除表面37可以设置在偏心研磨头28的中部35、近端部30和/或远端部40中的一个或多个上。近端和/或远端倒圆边缘PR、DR也可设有组织清除表面,其上分布有如上所述的研磨材料。
在某些情况下,包括在此讨论的那种情况,研磨头28可用于逐渐地并无损伤地打开一个开口,使用研磨头28逐渐增加的远端部40直径以扩大开口的直径直到足够的斑块被清除,允许研磨头28推进穿透狭窄,然后在其内撤回。打开导向孔的能力通过数个特征而增强。圆锥状的近端部30使得可以逐渐推进和控制组织清除表面37到狭窄的研磨通路,获得用于继续推进研磨头28的导向孔。圆形倒角的近端和/或远端边缘PR、DR进一步促进导向孔的产生,并如此所描述的,其表面设有研磨材料以助于逐渐的并无损伤打开导向孔。进一步的,研磨头28的圆锥状近端部30(以及远端部40-未显示在图中)与圆筒状中部35的连接处可以限定边缘,该边缘在装置逐步推进时可切割或研磨斑块,进而扩大被研磨狭窄的直径。此外,如上所述,研磨头28的近端部30,以及中部35和远端部40(未显示在图中)的表面,可完全或部分覆盖组织清除表面37的研磨材料,进而在通过狭窄推进和撤回促进斑块的研磨并以渐进及可控的方式打开狭窄。最后,足够地斑块将被清除,使得整个研磨头28可以穿透狭窄推进和撤回。
此外,非柔性的研磨头28的尺寸可以适当地设计以产生穿过狭窄的导向孔,必需产生用于本发明的持续增大研磨头28沿着的通道,这样开口是逐渐被打开的,或可能创造导向孔以使得某些在先,如在Shturman 6494890中描述的装置,即驱动轴的柔性偏心膨大部随后可以进入。这样一种设置可以包括使用两个分离的装置或结合两个(或更多)在一个装置中。例如,沿着驱动轴20远端设置本发明的非柔性偏心研磨头28,结合更近端设置的,如在Shturman 6494890公开的驱动轴20的柔性偏心膨大研磨部也许是有利的。在这一实施例中,导向孔可以使用非柔性的研磨头28打开,这样驱动轴20的柔性偏心膨大研磨部可以跟随穿过狭窄,更进一步地打开它。作为替换,持续增大的非柔性研磨头28可被连续地沿着驱动轴20设置,最小的位于最远离驱动轴20的末端,即最接近狭窄。更进一步的替换,非柔性和柔性的(在下文论述),偏心研磨头28的结合可沿着驱动轴20连续设置。
图13显示了本发明具有导线20的偏心膨大研磨头28,附着的研磨头28沿着导线15推进,并在狭窄已经基本上打开后,处于动脉“A”内的“静止位”,因此,显示了装置可以打开狭窄到远超过装置名义直径的直径。
动脉中狭窄可被打开到直径大于本发明偏心膨大研磨头名义直径的程度取决于数个参数,包括偏心膨大研磨头的形状、偏心膨大研磨头的质量、质量的分布和,因此,研磨头内质心相对于驱动轴的转动轴的位置,以及转速。
在确定离心力时转速是一个重要因素,离心力是膨大研磨头的组织清除表面压迫狭窄组织的力,进而使得操作者可以控制组织清除率。转速的控制同样也可以,在某种程度上,控制装置将打开狭窄的最大直径。申请人还发现可靠地控制组织清除表面压迫狭窄组织的力的能力不仅可以使操作者更好地控制组织清除率,还可以更好地控制被清除颗粒的尺寸。
图14-15显示了由本发明偏心研磨头28的各种实施例使用的大致螺旋轨道,研磨头28显示相对于导线15,研磨头28沿其推进。出于说明性目的,图14-15中的螺旋状路径的高被放大了,事实上,偏心膨大研磨头28的每一个螺旋状路径通过组织清除表面37只清除极薄的一层组织,当装置正向和反向通过狭窄反复移动时,通过偏心膨大研磨头28的作用产生了许多、许多这样的螺旋以彻底地打通狭窄。图14显示了本发明腔内斑块旋磨装置的偏心膨大研磨头28的3个不同旋转位置。在每一个位置,与偏心膨大研磨头28的研磨面相接触的斑块“P”被去除--这3个位置通过与斑块“P”接触的3个不同的点区分,这些点在图中标示为B1、B2和B3。注意,在每一个点,其一般是偏心膨大研磨头28的研磨面的相同部分与尽量辐射远离驱动轴的转动轴的组织清除表面37相接触。
除上述的非柔性研磨头的实施例之外,本发明的多种实施例进一步在偏心研磨头28包括部分柔性。典型的实施例图示在图15-18中。
图15显示了类似于在图7-11中提供的研磨头,但是在研磨头28上设置有柔性缝46。图示的缝46为完全切透研磨头28并进入腔23,以使研磨头28可最大程度的弯曲。但是,本领域的技术人员将认识到缝46不必延伸到腔23,并可通过有效地切刻研磨头28而非延伸入腔23以获得其柔性。在各中实施例中,研磨头28将随柔性驱动轴20弯曲,以易化在多弯曲通路的目标腔中的推进。研磨头28的这种柔性使得在进入病变研磨的过程中提供更少损伤性进入,亦可提供更少损伤性退出。至少需要一个柔性缝46以提供这种柔性;优选设置多个柔性缝46。
图15的柔性研磨头28的实施例显示了一系列平均分布的柔性缝46,柔性缝46的宽度和深度基本相等,其中缝46被完全切刻通过研磨头28并到达其内的腔23。本领域的技术人员将认识到研磨头28的柔性可被控制,例如通过,修饰、通过人为操纵,特别是以下部件的一个或多个:缝46的数量;缝46在研磨头28中的深度;缝46的宽度;缝46的切割角;缝46在研磨头28上的分布。
因此,研磨头的柔性特性可使用柔性缝46来控制或修饰。本发明的某些实施例可包括,例如,柔性缝46集中在研磨头28中心附近,即分布在中部35中,只有一个缝46位于近端部30,一个缝46位于远端部40。对本领域的技术人员而言,显然有许多种可能的等同替换;每一个都在本发明的范围之内。
如上所述,每一个柔性研磨头的实施例都可包括设置在其上的研磨材料,并与非柔性实施例相结合。
因此本发明的偏心研磨头28可包括非柔性的和/或至少部分柔性的实施例。
虽然不希望限定于任何特定的工作原理,申请人相信质心偏离旋转轴造成了膨大研磨头的“轨道”运动,“轨道”的直径可以通过改变,特别是驱动轴的转速加以控制。无论“轨道”运动是否如图14-15所示般的几何规则是确定的,但是申请人经验显示通过改变驱动轴的转速,可以控制促进偏心膨大研磨头28的组织清除表面对抗狭窄表面的离心力。离心力可根据公式:
Fc=mΔx (πn/30) 2 确定。
其中,Fc是离心力,m是偏心膨大研磨头的质量,Δx是偏心膨大研磨头质心与驱动轴的转动轴之间的距离,n是每分钟的转数(rpm)。这个力Fc的控制提供了对被清除组织速度的控制,对装置将打开狭窄的最大直径的控制,以及对被清除组织颗粒大小的改善控制。
与在先的高速腔内斑块旋磨装置相比,本发明的研磨头28具有更大的质量。因此,在高速旋转过程可以获得更大的轨道,这反过来使得可以使用比在先装置小的研磨头。除了可以在完全或基本上堵塞的动脉等产生导向孔之外,在插入的过程中,使用更小的研磨头将获得更大的通路便利性和更少的损伤。
操作时,使用本发明的腔内斑块旋磨装置,偏心膨大研磨头28反复往返通过狭窄。通过改变装置的转速,可以控制组织清除表面对狭窄组织的力,进而更好地控制斑块去除的速度以及被清除组织的颗粒大小。因为狭窄被打开到大于偏心膨大研磨头28名义直径更大的直径,冷却液和血液可以持续地围绕膨大研磨头流动。一旦研磨头穿过病变,血液和冷却液的这种持续流动不断地冲走被清除的组织颗粒,进而提供了被清除颗粒的一致释放。
偏心膨大研磨头28具有的最大截面部直径在约1.0 mm到约3.0 mm之间。因此,偏心膨大研磨头具有的截面直径包括,但不限于:1.0 mm、1.25 mm、1.50mm、1.75 mm、2.0 mm、2.25 mm、2.50 mm、2.75 mm和3.0 mm。本领域的技术人员将认识到,上述以0.25mm为梯度递增的截面直径仅仅是典型的,本发明并不限于所述典型列表,因此,以其他梯度递增的截面直径也是可能的并在本发明的范围之内。
如上所述,因为膨大研磨头28的偏心率取决于多个参数,申请人发现以下设计参数可被认为与驱动轴20的转动轴21和横截面部几何中心之间的距离有关,在偏心膨大研磨头的最大截面直径处取一位置:对最大截面直径在约1.0 mm到约1.5 mm之间的偏心膨大研磨头的装置而言,几何中心优选以至少约0.02mm的距离远离驱动轴的转动轴分布,优选的以至少约0.035 mm的距离;对最大截面直径在约1.5 mm到约1.75 mm之间的偏心膨大研磨头的装置而言,几何中心优选以至少约0.05 mm的距离远离驱动轴的转动轴分布,优选的以至少约0.07mm的距离,最佳以至少约0.09 mm的距离;对最大截面直径在约1.75 mm到约2.0 mm之间的偏心膨大研磨头的装置而言,几何中心优选以至少约0.1 mm的距离远离驱动轴的转动轴分布,优选的以至少约0.15 mm的距离,最佳以至少约0.2 mm的距离;以及对最大截面直径在2.0 mm以上的偏心膨大研磨头的装置而言,几何中心优选以至少约0.15 mm的距离远离驱动轴的转动轴分布,优选的以至少约0.25 mm的距离,最佳以至少约0.3 mm的距离。
设计参数同样可基于质心的位置。对最大截面直径在约1.0 mm到约1.5 mm之间的偏心膨大研磨头28的装置而言,质心优选以至少约0.013 mm的距离远离驱动轴的转动轴分布,优选以至少约0.02 mm的距离;对最大截面直径在约1.5 mm到约1.75 mm之间的偏心膨大研磨头28的装置而言,质心优选以至少约0.03 mm的距离远离驱动轴的转动轴分布,优选以至少约0.05mm的距离;对最大截面直径在约1.75mm到约2.0mm之间的偏心膨大研磨头28的装置而言,质心优选以至少约0.06 mm的距离远离驱动轴的转动轴分布,优选以至少约0.1mm的距离;以及对最大截面直径在约2.0 mm以上的偏心膨大研磨头28的装置而言,质心优选以至少约0.1 mm的距离远离驱动轴的转动轴分布,优选以至少约0.16 mm的距离。
优选的,壁50的厚度,例如,如图10C所示,将空腔与近端30、中部35和/或远端40限定的外表面分隔应当至少为0.008英寸厚,以保证结构的稳定性和完整性。
优选的,选择的设计参数使膨大研磨头28足够偏心,当沿着固定导线15(充分拉紧以排除导线任何潜在的移动)以大于约20000 rpm的转速旋转时,其至少一部分组织清除表面37可旋转通过直径大于偏心膨大研磨头28名义直径的路径(不管这种路径是否优选为规则的或环形的)。例如,并不是限定,对最大直径在约1.5 mm到约1.75 mm之间的膨大研磨头28而言,组织清除表面37的至少一部分可以旋转通过直径比偏心膨大研磨头28名义直径至少大约10%的路径,优选的比偏心膨大研磨头28名义直径至少大约15%,最佳比偏心膨大研磨头28名义直径至少大约20%。对最大直径在约1.75 mm到约2.0 mm之间的膨大研磨头28而言,组织清除部的至少一部分可以旋转通过直径比偏心膨大研磨头28名义直径至少大约20%的路径,优选的比偏心膨大研磨头28名义直径至少大约25%,最佳比偏心膨大研磨头28名义直径至少大约30%。对最大直径至少约为2.0 mm的膨大研磨头28而言,组织清除表面37的至少一部分可旋转通过直径的路径,优选的比偏心膨大研磨头28名义直径至少大约40%。
优选的,选择的设计参数可使膨大研磨头28足够偏心,当沿着固守导线15以约20000 rpm到约200000 rpm之间的速度旋转时,其组织清除表面37的至少一部分旋转通过最大直径基本大于偏心膨大研磨头28最大名义直径的路径(不管这种路径是否优选为规则的或环形的)。在一些实施例中,本发明可以限定最大直径比偏心膨大研磨头28的最大名义直径增加约50%到约400%之间的轨道。优选的这种轨道的最大直径比偏心膨大研磨头28的最大名义直径大约200%到约400%。
本发明不应被认为限于上述的特定例子,而应当被理解为覆盖本发明的所有方面。各种修改、等同步骤,以及本领域的技术人员根据本说明书的直接认识后,作出的显而易见的适用于本发明的多种结构。
Claims (39)
1.一种用于在具有给定直径的动脉内打通狭窄的腔内斑块旋磨装置,包括:
最大直径小于动脉直径的导线;
柔性的、细长的、可沿导线推进的可旋转驱动轴,驱动轴具有转动轴;以及至少一个偏心研磨头,所述至少一个偏心研磨头包括固定于驱动轴的非柔性的单一的整体片结构,并包括径向偏离驱动轴的转动轴定位的质心,偏心研磨头包括近端部、中部和远端部,其中近端部包括近端外表面,中部包括中部外表面,远端部包括远端外表面,近端外表面具有向远端扩大的直径和圆形近端倒圆边缘,所述圆形近端倒圆边缘包括一半径,远端外表面具有向远端缩小的直径以及圆形远端倒圆边缘,所述圆形远端倒圆边缘包括一半径,其中圆形近端倒圆边缘的半径和圆形远端倒圆边缘的半径基本相等,中部外表面为圆柱状,其中至少中部外表面包括组织清除部,偏心研磨头内限定了通透的驱动轴腔和空腔,所述空腔具有尺寸和形状,从而至少一个偏心研磨头的质心的定位至少部分确定,以及其中驱动轴至少部分穿过驱动轴腔;
其中所述至少一个偏心研磨头包括一静止直径并在高速旋转过程中遍历一轨道路径,其中所述至少一个偏心研磨头偏心的结果是由所述至少一个偏心研磨头遍历的轨道路径大于静止直径。
2.根据权利要求1所述的腔内斑块旋磨装置,其中驱动轴部分穿过驱动轴腔并附着于其上构成单一的、完整的驱动轴。
3.根据权利要求1所述的腔内斑块旋磨装置,其中驱动轴部分穿过驱动轴腔并附着于其上,包括至少两部分,每一部分都附着于驱动轴腔,所述至少两部分驱动轴之间有一缺口。
4.根据权利要求1所述的腔内斑块旋磨装置,其中至少一个偏心研磨头的近端外表面大致限定为圆锥体的外表面,圆锥体具有与驱动轴的转动轴相交的轴。
5.根据权利要求1所述的腔内斑块旋磨装置,其中至少一个偏心研磨头的远端外表面大致限定为圆锥体的外表面,圆锥体具有与驱动轴的转动轴相交的轴。
6.根据权利要求1所述的腔内斑块旋磨装置,其中圆形近端倒圆边缘包括组织清除表面。
7.根据权利要求1所述的腔内斑块旋磨装置,其中圆形远端倒圆边缘包括组织清除表面。
8.根据权利要求1所述的腔内斑块旋磨装置,其中近端、远端和中部外表面包括组织清除部。
9.根据权利要求1所述的腔内斑块旋磨装置,其中仅中部外表面包括组织清除部。
10.根据权利要求4所述的腔内斑块旋磨装置,其中近端外表面的锥体轴和远端外表面的锥体轴彼此相交并与驱动轴的转动轴共面。
11.根据权利要求1所述的腔内斑块旋磨装置,其中远端外表面具有以恒定比率向远端扩大的直径,进而大致形成圆锥体状。
12.根据权利要求11所述的腔内斑块旋磨装置,其中近端外表面具有以恒定比率向远端缩小的直径,进而大致形成圆锥体状。
13.根据权利要求12所述的腔内斑块旋磨装置,其中每一个圆锥体相对的面彼此间存在10°到30°的角α。
14.根据权利要求12所述的腔内斑块旋磨装置,其中每一个圆锥体相对的面彼此间存在20°到24°的角α。
15.根据权利要求12所述的腔内斑块旋磨装置,其中至少一个偏心研磨头的每一个圆锥体具有不与驱动轴的转动轴平行的轴。
16.根据权利要求12所述的腔内斑块旋磨装置,其中至少一个偏心研磨头的近端部和远端部的锥体轴是共面的,并分别以2°到8°之间的角β与驱动轴的转动轴相交。
17.根据权利要求12所述的腔内斑块旋磨装置,其中至少一个偏心研磨头的近端部和远端部的锥体轴是共面的,并分别以3°到6°之间的角β与驱动轴的转动轴相交。
18.根据权利要求1所述的腔内斑块旋磨装置,其中中部外表面用于在偏心研磨头的近端和远端外表面之间提供平滑过渡的形状。
19.根据权利要求1所述的腔内斑块旋磨装置,其中至少一个偏心研磨头的近端和远端外表面彼此间大致是对称的。
20.根据权利要求1所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大直径在1.0mm到1.5mm之间,质心至少以0.013mm的距离远离驱动轴的转动轴分布。
21.根据权利要求1所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大直径在1.5mm到1.75mm之间,质心至少以0.03mm的距离远离驱动轴的转动轴分布。
22.根据权利要求1所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大直径在1.75mm到2.0mm之间,质心至少以0.06mm的距离远离驱动轴的转动轴分布。
23.根据权利要求1所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大直径为至少2.0mm,质心至少以0.1mm的距离远离驱动轴的转动轴分布。
24.根据权利要求1所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大直径在1.0mm到1.5mm之间,质心至少以0.02mm的距离远离驱动轴的转动轴分布。
25.根据权利要求1所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大直径在1.5mm到1.75mm之间,质心至少以0.05mm的距离远离驱动轴的转动轴分布。
26.根据权利要求1所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大直径在1.75mm到2.0mm之间,质心至少以0.1mm的距离远离驱动轴的转动轴分布。
27.根据权利要求1所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大直径为至少2.0mm,质心至少以0.16mm的距离远离驱动轴的转动轴分布。
28.根据权利要求1所述的腔内斑块旋磨装置,其中位于偏心膨大直径部最大截面直径处的偏心膨大直径部的横截面具有远离驱动轴的转动轴分布的几何中心。
29.根据权利要求28所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大截面直径在1.5mm到1.75mm之间,几何中心至少以0.05mm的距离远离驱动轴的转动轴分布。
30.根据权利要求28所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大截面直径在1.75mm到2.0mm之间,几何中心至少以0.1mm的距离远离驱动轴的转动轴分布。
31.根据权利要求28所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大截面直径至少2.0mm,几何中心至少以0.15mm的距离远离驱动轴的转动轴分布。
32.根据权利要求28所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大截面直径在1.0mm到1.5mm之间,几何中心至少以0.035mm的距离远离驱动轴的转动轴分布。
33.根据权利要求28所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大截面直径在1.5mm到1.75mm之间,几何中心至少以0.07mm的距离远离驱动轴的转动轴分布。
34.根据权利要求28所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大截面直径在1.75mm到2.0mm之间,几何中心至少以0.15mm的距离远离驱动轴的转动轴分布。
35.根据权利要求28所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大截面直径至少2.0mm,几何中心至少以0.25mm的距离远离驱动轴的转动轴分布。
36.根据权利要求28所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大截面直径在1.5mm到1.75mm之间,几何中心至少以0.09mm的距离远离驱动轴的转动轴分布。
37.根据权利要求28所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大截面直径在1.75mm到2.0mm之间,几何中心至少以0.20mm的距离远离驱动轴的转动轴分布。
38.根据权利要求28所述的腔内斑块旋磨装置,其中偏心膨大直径部的最大截面直径至少为2.0mm,几何中心至少以0.30mm的距离远离驱动轴的转动轴分布。
39.根据权利要求1所述的腔内斑块旋磨装置,其中组织清除部是研磨面。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/130,024 US8758377B2 (en) | 2008-05-30 | 2008-05-30 | Eccentric abrading and cutting head for high-speed rotational atherectomy devices |
| US12/130,024 | 2008-05-30 | ||
| PCT/US2009/043451 WO2009146248A1 (en) | 2008-05-30 | 2009-05-11 | Eccentric abrading and cutting head for high-speed rotational atherectomy devices |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102046100A CN102046100A (zh) | 2011-05-04 |
| CN102046100B true CN102046100B (zh) | 2013-04-24 |
Family
ID=41377525
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN200980119846.4A Active CN102046100B (zh) | 2008-05-30 | 2009-05-11 | 用于高速腔内斑块旋磨装置的偏心研磨和切割头 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US8758377B2 (zh) |
| EP (1) | EP2303149B1 (zh) |
| JP (1) | JP5653347B2 (zh) |
| CN (1) | CN102046100B (zh) |
| AU (1) | AU2009251467B2 (zh) |
| CA (1) | CA2718074C (zh) |
| DK (1) | DK2303149T3 (zh) |
| NO (1) | NO2303149T3 (zh) |
| WO (1) | WO2009146248A1 (zh) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8551130B2 (en) * | 2010-02-18 | 2013-10-08 | Cardiovascular Systems, Inc. | Therapeutic agent delivery system, device and method for localized application of therapeutic substances to a biological conduit |
| US9907567B2 (en) * | 2010-05-04 | 2018-03-06 | Samuel Shiber | Mechanical — pharmaceutical system for opening obstructed bodily vessels |
| US9289230B2 (en) | 2012-09-17 | 2016-03-22 | Cardiovascular Systems, Inc. | Rotational atherectomy device with a system of eccentric abrading heads |
| US20150005791A1 (en) * | 2013-06-28 | 2015-01-01 | Cardiovascular Systems, Inc. | Atherectomy device having combined open/close drive shaft |
| US20150080795A1 (en) | 2013-07-26 | 2015-03-19 | Cardiovascular Systems, Inc. | Devices, systems and methods for performing atherectomy and subsequent balloon angioplasty without exchanging devices |
| US10271869B2 (en) | 2014-03-01 | 2019-04-30 | Rex Medical, L.P. | Atherectomy device |
| EP3116417B1 (en) | 2014-03-12 | 2021-09-08 | Boston Scientific Limited | Infusion lubricated atherectomy catheter |
| US10405878B2 (en) | 2014-07-25 | 2019-09-10 | Boston Scientific Scimed, Inc. | Rotatable medical device |
| US10405879B2 (en) | 2014-12-04 | 2019-09-10 | Boston Scientific Scimed, Inc. | Rotatable medical device |
| US10463389B2 (en) | 2014-12-27 | 2019-11-05 | Rex Medical, L.P. | Atherectomy device |
| US10433868B2 (en) | 2014-12-27 | 2019-10-08 | Rex Medical, L.P. | Artherectomy device |
| US10226276B2 (en) | 2015-06-26 | 2019-03-12 | Covidien Lp | Tissue-removing catheter including operational control mechanism |
| US11253292B2 (en) | 2015-09-13 | 2022-02-22 | Rex Medical, L.P. | Atherectomy device |
| US10307175B2 (en) | 2016-03-26 | 2019-06-04 | Rex Medical, L.P | Atherectomy device |
| CN106214216B (zh) * | 2016-08-31 | 2019-01-25 | 赵萍萍 | 一种血栓清除仪 |
| US11690645B2 (en) | 2017-05-03 | 2023-07-04 | Medtronic Vascular, Inc. | Tissue-removing catheter |
| CN110582242B (zh) | 2017-05-03 | 2023-03-10 | 美敦力瓦斯科尔勒公司 | 组织移除导管 |
| US11819236B2 (en) | 2019-05-17 | 2023-11-21 | Medtronic Vascular, Inc. | Tissue-removing catheter |
| CN111513818A (zh) * | 2020-05-12 | 2020-08-11 | 安徽一升医疗设备有限公司 | 一种用于治疗冠状动脉钙化病变的旋磨介入治疗仪 |
| CN114144131A (zh) * | 2020-07-03 | 2022-03-04 | 为泰医疗器械(深圳)有限公司 | 血管内钙化病变旋磨设备 |
| CN112494111A (zh) * | 2020-12-10 | 2021-03-16 | 蚌埠冠硕医疗科技有限公司 | 用于动脉斑块的介入式旋磨装置 |
| CN114129227B (zh) * | 2022-02-08 | 2022-05-10 | 广州博鑫医疗技术有限公司 | 偏心旋磨头的制造工装、制造方法和介入式旋磨装置 |
| WO2024026919A1 (zh) * | 2022-08-05 | 2024-02-08 | 广州博鑫医疗技术有限公司 | 偏心旋磨头及其制造方法、驱动轴及介入式医疗设备 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5314438A (en) * | 1992-12-17 | 1994-05-24 | Shturman Cardiology Systems, Inc. | Abrasive drive shaft device for rotational atherectomy |
| US6494890B1 (en) * | 1997-08-14 | 2002-12-17 | Shturman Cardiology Systems, Inc. | Eccentric rotational atherectomy device |
| GB2426456A (en) * | 2005-05-26 | 2006-11-29 | Leonid Shturman | Rotational atherectomy device with offset abrasive and counterweight |
Family Cites Families (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4445509A (en) | 1982-02-04 | 1984-05-01 | Auth David C | Method and apparatus for removal of enclosed abnormal deposits |
| US5007896A (en) | 1988-12-19 | 1991-04-16 | Surgical Systems & Instruments, Inc. | Rotary-catheter for atherectomy |
| US5041082A (en) | 1986-06-16 | 1991-08-20 | Samuel Shiber | Mechanical atherectomy system and method |
| US5443443A (en) | 1984-05-14 | 1995-08-22 | Surgical Systems & Instruments, Inc. | Atherectomy system |
| US4646736A (en) | 1984-09-10 | 1987-03-03 | E. R. Squibb & Sons, Inc. | Transluminal thrombectomy apparatus |
| CA1293663C (en) | 1986-01-06 | 1991-12-31 | David Christopher Auth | Transluminal microdissection device |
| US4728319A (en) | 1986-03-20 | 1988-03-01 | Helmut Masch | Intravascular catheter |
| US4883460A (en) | 1988-04-25 | 1989-11-28 | Zanetti Paul H | Technique for removing deposits from body vessels |
| US4935025A (en) | 1989-01-30 | 1990-06-19 | Bundy Mark A | Transluminal lysing device |
| US5431673A (en) | 1989-02-17 | 1995-07-11 | American Biomed, Inc. | Distal atherectomy catheter |
| US5078723A (en) | 1989-05-08 | 1992-01-07 | Medtronic, Inc. | Atherectomy device |
| US5226909A (en) | 1989-09-12 | 1993-07-13 | Devices For Vascular Intervention, Inc. | Atherectomy device having helical blade and blade guide |
| US5116352A (en) | 1989-10-06 | 1992-05-26 | Angiomed Ag | Apparatus for removing deposits from vessels |
| US5026384A (en) | 1989-11-07 | 1991-06-25 | Interventional Technologies, Inc. | Atherectomy systems and methods |
| US5030201A (en) | 1989-11-24 | 1991-07-09 | Aubrey Palestrant | Expandable atherectomy catheter device |
| US5158564A (en) | 1990-02-14 | 1992-10-27 | Angiomed Ag | Atherectomy apparatus |
| US5267955A (en) | 1990-05-10 | 1993-12-07 | Lake Region Manufacturing Company, Inc. | Atherectomy device |
| US5395311A (en) | 1990-05-14 | 1995-03-07 | Andrews; Winston A. | Atherectomy catheter |
| US5217474A (en) | 1991-07-15 | 1993-06-08 | Zacca Nadim M | Expandable tip atherectomy method and apparatus |
| ES2147730T3 (es) * | 1991-07-15 | 2000-10-01 | Nadim M Zacca | Aparato de aterectomia y angioplastia. |
| FR2685190B1 (fr) | 1991-12-23 | 1998-08-07 | Jean Marie Lefebvre | Dispositif rotatif d'atherectomie ou de thrombectomie a developpement transversal centrifuge. |
| US5224945A (en) | 1992-01-13 | 1993-07-06 | Interventional Technologies, Inc. | Compressible/expandable atherectomy cutter |
| US5192291A (en) | 1992-01-13 | 1993-03-09 | Interventional Technologies, Inc. | Rotationally expandable atherectomy cutter assembly |
| CA2107741C (en) | 1992-10-07 | 2000-06-27 | Peter T. Keith | Ablation devices and methods of use |
| US5312427A (en) | 1992-10-16 | 1994-05-17 | Shturman Cardiology Systems, Inc. | Device and method for directional rotational atherectomy |
| US5643297A (en) | 1992-11-09 | 1997-07-01 | Endovascular Instruments, Inc. | Intra-artery obstruction clearing apparatus and methods |
| US5490859A (en) | 1992-11-13 | 1996-02-13 | Scimed Life Systems, Inc. | Expandable intravascular occlusion material removal devices and methods of use |
| US5501694A (en) | 1992-11-13 | 1996-03-26 | Scimed Life Systems, Inc. | Expandable intravascular occlusion material removal devices and methods of use |
| US5540707A (en) | 1992-11-13 | 1996-07-30 | Scimed Life Systems, Inc. | Expandable intravascular occlusion material removal devices and methods of use |
| US5836868A (en) | 1992-11-13 | 1998-11-17 | Scimed Life Systems, Inc. | Expandable intravascular occlusion material removal devices and methods of use |
| US5372602A (en) | 1992-11-30 | 1994-12-13 | Device For Vascular Intervention, Inc. | Method of removing plaque using catheter cutter with torque control |
| AU5956194A (en) * | 1993-02-02 | 1994-08-29 | Shturman Cardiology Systems, Inc. | Abrasive drive shaft device for rotational atherectomy |
| US5584843A (en) | 1994-12-20 | 1996-12-17 | Boston Scientific Corporation | Shaped wire multi-burr rotational ablation device |
| US5556408A (en) | 1995-04-27 | 1996-09-17 | Interventional Technologies Inc. | Expandable and compressible atherectomy cutter |
| US5681336A (en) | 1995-09-07 | 1997-10-28 | Boston Scientific Corporation | Therapeutic device for treating vien graft lesions |
| US5843103A (en) | 1997-03-06 | 1998-12-01 | Scimed Life Systems, Inc. | Shaped wire rotational atherectomy device |
| US6015420A (en) | 1997-03-06 | 2000-01-18 | Scimed Life Systems, Inc. | Atherectomy device for reducing damage to vessels and/or in-vivo stents |
| US6183487B1 (en) | 1997-03-06 | 2001-02-06 | Scimed Life Systems, Inc. | Ablation device for reducing damage to vessels and/or in-vivo stents |
| US6132444A (en) * | 1997-08-14 | 2000-10-17 | Shturman Cardiology Systems, Inc. | Eccentric drive shaft for atherectomy device and method for manufacture |
| GB9717580D0 (en) | 1997-08-19 | 1997-10-22 | Curry Paul | Device for opening blocked tubes |
| US20080140101A1 (en) | 2006-12-07 | 2008-06-12 | Revascular Therapeutic, Inc. | Apparatus for crossing occlusions or stenoses |
| US6146395A (en) * | 1998-03-05 | 2000-11-14 | Scimed Life Systems, Inc. | Ablation burr |
| US6096054A (en) * | 1998-03-05 | 2000-08-01 | Scimed Life Systems, Inc. | Expandable atherectomy burr and method of ablating an occlusion from a patient's blood vessel |
| US6001112A (en) | 1998-04-10 | 1999-12-14 | Endicor Medical, Inc. | Rotational atherectomy device |
| US7645242B1 (en) | 1998-12-31 | 2010-01-12 | Advanced Cardiovascular Systems, Inc. | Composite guidewire with drawn and filled tube construction |
| US7507245B2 (en) * | 2001-10-19 | 2009-03-24 | Cardiovascular Systems, Inc. | Rotational angioplasty device with abrasive crown |
| US8257278B2 (en) | 2002-05-14 | 2012-09-04 | Advanced Cardiovascular Systems, Inc. | Metal composite guide wire |
| US20050149083A1 (en) | 2004-01-07 | 2005-07-07 | Dmitriy Prudnikov | Terminal guide for rotational atherectomy device and method of using same |
| EP1848348A2 (en) * | 2005-02-02 | 2007-10-31 | Peacock, James C., III | Total vascular occlusion treatment system and method |
| US8052703B2 (en) | 2005-06-29 | 2011-11-08 | Boston Scientific Scimed, Inc. | Medical devices with cutting elements |
| US20080300610A1 (en) | 2007-05-31 | 2008-12-04 | Cook Incorporated | Device for treating hardened lesions and method of use thereof |
| US8597313B2 (en) | 2007-06-11 | 2013-12-03 | Cardiovascular Systems, Inc. | Eccentric abrading head for high-speed rotational atherectomy devices |
-
2008
- 2008-05-30 US US12/130,024 patent/US8758377B2/en active Active
-
2009
- 2009-05-11 AU AU2009251467A patent/AU2009251467B2/en active Active
- 2009-05-11 DK DK09755610.4T patent/DK2303149T3/en active
- 2009-05-11 NO NO09755610A patent/NO2303149T3/no unknown
- 2009-05-11 CA CA2718074A patent/CA2718074C/en active Active
- 2009-05-11 CN CN200980119846.4A patent/CN102046100B/zh active Active
- 2009-05-11 WO PCT/US2009/043451 patent/WO2009146248A1/en active Application Filing
- 2009-05-11 EP EP09755610.4A patent/EP2303149B1/en active Active
- 2009-05-11 JP JP2011511690A patent/JP5653347B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5314438A (en) * | 1992-12-17 | 1994-05-24 | Shturman Cardiology Systems, Inc. | Abrasive drive shaft device for rotational atherectomy |
| US6494890B1 (en) * | 1997-08-14 | 2002-12-17 | Shturman Cardiology Systems, Inc. | Eccentric rotational atherectomy device |
| GB2426456A (en) * | 2005-05-26 | 2006-11-29 | Leonid Shturman | Rotational atherectomy device with offset abrasive and counterweight |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2303149A1 (en) | 2011-04-06 |
| JP2011521713A (ja) | 2011-07-28 |
| EP2303149A4 (en) | 2011-11-23 |
| CA2718074C (en) | 2016-07-05 |
| DK2303149T3 (en) | 2018-06-06 |
| CN102046100A (zh) | 2011-05-04 |
| AU2009251467B2 (en) | 2014-07-10 |
| AU2009251467A1 (en) | 2009-12-03 |
| CA2718074A1 (en) | 2009-12-03 |
| WO2009146248A1 (en) | 2009-12-03 |
| EP2303149B1 (en) | 2018-02-28 |
| NO2303149T3 (zh) | 2018-07-28 |
| JP5653347B2 (ja) | 2015-01-14 |
| US8758377B2 (en) | 2014-06-24 |
| US20090299391A1 (en) | 2009-12-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102046100B (zh) | 用于高速腔内斑块旋磨装置的偏心研磨和切割头 | |
| CN102325502B (zh) | 作为旋切术一部分的研磨头 | |
| CN102573670B (zh) | 用于高速腔内斑块旋切术装置的偏心研磨切割头 | |
| CN102046099B (zh) | 用于高速旋磨设备的偏心研磨部件 | |
| US10888351B2 (en) | Eccentric system of abrasive elements with equal mass for rotational atherectomy | |
| CN102223846B (zh) | 用于提高高速腔内斑块旋磨装置研磨部件旋转振幅的方法和装置 | |
| CN102300510B (zh) | 用于具有横向位移的质心的切除术设备的多材料研磨头 | |
| CN102438535B (zh) | 提高磨切效率的旋磨术装置和方法 | |
| JP5307127B2 (ja) | 高速回転式アテレクトミー装置のための偏心研磨ヘッド | |
| US8348965B2 (en) | Rotational atherectomy device with counterweighting | |
| JP2010528817A5 (zh) | ||
| CN105120778A (zh) | 用于旋转粥样斑块切除术的导引尖端套管的装置、系统和方法 | |
| CN107072679A (zh) | 用于旋切的导向尖端套管的装置、系统与方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant |