CN101813499A - Method and device for calibrating three-dimensional micro tactile sensor - Google Patents
Method and device for calibrating three-dimensional micro tactile sensor Download PDFInfo
- Publication number
- CN101813499A CN101813499A CN 201010136209 CN201010136209A CN101813499A CN 101813499 A CN101813499 A CN 101813499A CN 201010136209 CN201010136209 CN 201010136209 CN 201010136209 A CN201010136209 A CN 201010136209A CN 101813499 A CN101813499 A CN 101813499A
- Authority
- CN
- China
- Prior art keywords
- tactile sensor
- dimensional micro
- piezoelectric ceramics
- micro tactile
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Abstract
The invention discloses a method and a device for calibrating a three-dimensional micro tactile sensor. The method and the device are characterized in that: a three-dimensional micro tactile sensor fixing device, a micromovement input device, a CCD camera and a laser interferometer are arranged in a vibration isolation chamber; the three-dimensional micro tactile sensor is put on a rotary table through different clamping mechanisms; the micromovement input device realizes Z-axis coarse movement positioning of the three-dimensional micro tactile sensor and zero contact of the sensor and piezoelectric ceramics through a control device; the piezoelectric ceramics output amplitude signals to apply displacement constraint signals to the three-dimensional micro tactile sensor through a control system; an input-output relational graph is established through a signal acquisition system and computer software; and a calibration system of the laser interferometer tracks and measures the displacement constraint quantity of the piezoelectric ceramics so as to test and calibrate performance parameters of the three-dimensional micro tactile sensor. The method and the device calibrate performance of the three-dimensional micro tactile sensor with multiple sensing modes, such as linearity, measuring range and precision.
Description
Technical field
The present invention relates to a kind of method of correction of instrument, particularly disclose a kind of calibration steps and device of measuring the three-dimensional micro tactile sensor that micron/nano uses.
Background technology
In the last few years, become an important motivity that promotes the sensor development with the fusion of semiconductor technology, this fusion makes the performance of sensor more powerful, and volume is more and more littler, expedites the emergence of out microsensor.The appearance of microsensor makes originally in field that much can not application sensors and is able to the application sensors part, thereby provides condition for the intellectuality of system product.Expedited the emergence of large quantities of novel micro nanometer rice sensors thus, the correlation detection technology of micron/nano size has been proposed new challenge.Conventional sensors is because the unicity of signal, low precision and limited to the feeble signal acquisition capacity, so corresponding various calibrating installation and method often can only be to the realization of conventional sensors to calibrating.Because sensitivity height, precision that the sensor acknowledge(ment) signal of micrometer/nanometer size requires are good, the collection feeble signal, so the signal handling capacity of calibrating installation is had higher requirement.Three-dimensional micro tactile sensor can be realized the measurement to the micrometer/nanometer level of geometric senses such as multidimensional size, position and shape characteristic, the whether superior accuracy that directly affects undersized transmission of quantity value of three-dimensional micro tactile sensor performance, simultaneously also significant to little machining precision and technological level.So the three-dimensional micro tactile sensor that design is finished carries out accurately, calibration timely, the actual characteristic of understanding three-dimensional micro tactile sensor is significant for himself exploitation and design.Long term growth to micro-nano industry has great impetus.Design and a kind ofly can will effectively solve comparison and detection the clamping calibrating installation of multiple three-dimensional micro tactile sensor and method to the performance parameter of three-dimensional micro tactile sensor.
Summary of the invention
Purpose of the present invention proposes a kind of calibration steps and device of three-dimensional micro tactile sensor, can effectively solve multiple sensing mode (pressure resistance type, inductance type, whether the calibration operation of the linearity of the three-dimensional micro tactile sensor of one dimension piezoelectric type), two dimension, three-dimensional and array, range, hysteresis quality, a plurality of performances of precision is assessed its performance and is adhered to specification.
The present invention is achieved in that a kind of calibration steps of three-dimensional micro tactile sensor, it is characterized in that: three-dimensional micro tactile sensor stationary installation, micrometric displacement input media, CCD camera and laser interferometer are installed in shock-isolation chamber; Three-dimensional micro tactile sensor is placed on the rotation platform by different clamping devices, the micrometric displacement input media realizes that by control device the Z axle coarse motion location of three-dimensional micro tactile sensor contacts with zero of piezoelectric ceramics with sensor, piezoelectric ceramics applies the displacement constraint signal for described three-dimensional micro tactile sensor by control system output amplitude signal, signal acquiring system and last machine software by three-dimensional micro tactile sensor, set up input---output relation figure, calibration system by laser interferometer is carried out tracking measurement to the displacement constraint amount of piezoelectric ceramics, realizes the test and the calibration of three-dimensional micro tactile sensor performance parameter.
The calibrating installation of three-dimensional micro tactile sensor is positioned in the shock-isolation chamber, and the shock-isolation chamber physical efficiency effectively absorbs the noise of extraneous certain frequency scope, can realize the noise isolation in the calibration process, and stable calibration environment is provided, and realizes high-precision calibration.Shock-isolation chamber can be realized freely locating by automatic locking mechanism, after tested three-dimensional micro tactile sensor is fixing, closes shock-isolation chamber and finishes calibration operation under the isolation environment.
The calibrating installation of three-dimensional micro tactile sensor in the course of the work, three-dimensional micro tactile sensor is all monitored by a CCD monitor in real time with the situation that contacts of piezoelectric ceramics, prevents the infringement of excessive three-dimensional micro tactile sensor that causes of displacement and micro-displacement apparatus; The piece calibration device is placed on the air supporting vibration-isolating platform, reduces the influence of ambient noise to measuring.
The apparatus and method of calibrating design at the performance of three-dimensional micro tactile sensor have following feature:
(1) in order to eliminate the influence of calibration process environment, calibration process is finished in the shock-isolation chamber of sealing, the in-built CCD camera head, after shock-isolation chamber is closed, monitor in real time by the CCD supervision, observe the situation that contacts of three-dimensional micro tactile sensor and micro-displacement platform, prevent the damage of excessive three-dimensional micro tactile sensor that causes of piezoelectric ceramics displacement and piezoelectric ceramics.
(2) in order to solve the horizontal and axial restraint of three-dimensional micro tactile sensor parts, be fixed on high-precision 360 ° of rotation platforms by clamping device, realize that by the control device (comprising manual and automatic Rotation Controllers) of rotation platform the XOY arbitrary plane angle performance that laterally, axially reaches of three-dimensional micro tactile sensor is calibrated.
(3) fix for the different directions that solves three-dimensional micro tactile sensor and rotation platform, designed axial, horizontal clamping device, realize effective clamping of three-dimensional micro tactile sensor parts, and guarantee that the three-dimensional micro tactile sensor parts have enough surpluses and realize effective beat.The clamping device of piezoelectric ceramics is realized the interlock of piezoelectric ceramics and gear train, and effectively realizes the clamping of piezoelectric ceramics.
(4) the coarse motion location on the Z-direction of the gear train of displacement input media and controller realization piezoelectric ceramics contacts with zero of piezoelectric ceramics with three-dimensional micro tactile sensor, after piezoelectric ceramics contacts with three-dimensional micro tactile sensor is zero, realize that by the piezoelectric ceramics control system displacement constraint signal pressure electroceramics displacement constraint signal to a certain degree causes that sensor output changes again, carry out data acquisition and demonstration by signal modulation and Acquisition Circuit, set up input---output relation figure.
(5) by the tracking measurement of laser interferometer to the high-precision displacement constraint signal of piezoelectric ceramics output, the displacement variable that obtains by laser interferometer measurement with collect input---output relation figure effectively compares, realize the high-precision calibration of the performance of three-dimensional micro tactile sensor.
The invention has the beneficial effects as follows: the actual performance to multiple three-dimensional micro tactile sensor realizes calibration and parameter calibration, solution is to the investigation of three-dimensional micro tactile sensor its actual performance before installation, realize linearity, range, the hysteresis quality of three-dimensional micro tactile sensor, the calibration of precision property, for the raising of micro fabrication provides foundation.Solved in the active demand to the calibration of geometrical dimensional measurement apparatus performance of little processing and manufacturing and microstructure field tests, achievement in research has important application prospects and practical value.For the exploitation and the improvement direction of novel three-dimensional micro tactile sensor were put forward effective foundation, also provide good scheme reference for developing new micro-/ nano means of testing and surveying instrument, and significant for the raising that promotes the microstructure surveying instrument.Simultaneously, to the development of high precision measuring system more and promote further developing of micro-nano precision measurement measuring technique and have important scientific meaning and learning value equally.
The invention will be further described below in conjunction with drawings and Examples.
Description of drawings
Fig. 1 is a three-dimensional micro tactile sensor calibrating installation synoptic diagram of the present invention;
Fig. 2 is the stationary installation assembly drawing of three-dimensional micro tactile sensor of the present invention;
Fig. 3 is a micrometric displacement input media assembly drawing of the present invention;
Fig. 4 a is the horizontal clamping device synoptic diagram of three-dimensional micro tactile sensor of the present invention;
Fig. 4 b is the axial clamping structural scheme of mechanism of three-dimensional micro tactile sensor of the present invention;
Fig. 4 c is a piezoelectric ceramics clamping device synoptic diagram of the present invention;
Fig. 5 a is a three-dimensional micro tactile sensor lateral performance calibration mode synoptic diagram of the present invention;
Fig. 5 b is a three-dimensional micro tactile sensor axial property calibration mode synoptic diagram of the present invention.
In the drawings: 1, fixed support; 2, rotating disc manual knob; 3, gear train manual knob; 4, index dial; 5, rotation platform; 6, sensor clamping mechanism; 7, three-dimensional micro tactile sensor; 8, piezoelectric ceramics; 9, piezoelectric ceramics clamping device; 10, CCD camera system; 11, laser interferometer; 12, gear train guide rail; 13, gear train article carrying platform; 14, platform web joint; 15, sensor clamping plate; 16, platform web joint; 17, sensor clamping plate; 18, laser via; 19, platform web joint; 20, piezoelectric ceramics grip block.
Embodiment
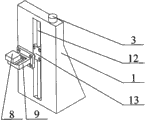
With reference to the accompanying drawings 1, three-dimensional micro tactile sensor calibrating installation of the present invention comprises fixed support 1, rotating disc manual knob 2, gear train manual knob 3, index dial 4, rotation platform 5, three-dimensional micro tactile sensor clamping device 6, three-dimensional micro tactile sensor 7, piezoelectric ceramics 8, piezoelectric ceramics clamping device 9, CCD camera system 10 and laser interferometer 11.
With reference to the accompanying drawings 2, the stationary installation of three-dimensional micro tactile sensor comprises: fixed support 1, rotating disc manual knob 2, index dial 4, rotation platform 5, sensor clamping mechanism 6 and three-dimensional micro tactile sensor 7.On fixed support 1, installed and can have 1 " rotation platform 5 of resolving power; realize three-dimensional micro tactile sensors 7 fixing with angle by sensor clamping mechanism 6, by be installed on the fixed support 1 rotating disc manual knob 2 and automatically Rotation Controllers realize the high precision angle orientation of XOY plane.The calibration mode synoptic diagram of two kinds of three-dimensional micro tactile sensors shown in accompanying drawing 5a and the 5b: a. lateral performance calibration mode b. is axially to the performance calibration mode.Select clamping device by two kinds of orientation, realize horizontal, axial restraint, realize location, any angle in the XOY plane by rotation platform drive three-dimensional micro tactile sensor, can realize effective calibration the multidimensional calibrating and the array three-dimensional micro tactile sensor of single gauge head sensor.
The input of three-dimensional micro tactile sensor displacement constraint signal.Micrometric displacement input media assembly drawing of the present invention comprises fixed support 1, gear train manual knob 3, gear train guide rail 12, gear train article carrying platform 13, sensor clamping mechanism 6, piezoelectric ceramics 8 shown in the accompanying drawing 3.For the coarse motion adjusting of Z axle and the high-precision signal input of piezoelectric ceramics micrometric displacement amount, Z-direction gear train guide rail 12 and gear train article carrying platform 13 are installed on fixed support 1, by sensor clamping mechanism 6, realize piezoelectric ceramics 8 and the flat interlock of gear train article carrying platform and effectively fixing, realize that by the gear train manual knob of installing on automatic transmission control device and the fixed support 13 gear train drives piezoelectric ceramics 8 and realizes friction speed, the displacement output of pattern and precision, the Primary Location of realization piezoelectric ceramics and three-dimensional micro tactile sensor gauge head parts.In order to realize effectively calibrating the displacement response performance of three-dimensional micro tactile sensor, by having high-resolution piezoelectric ceramic part, the prefabricated control of the signal mode of selection piezoelectric ceramics and speed, mobile displacement realizes high-precision, the displacement constraint amount of certain Oscillation Amplitude realizes the high-precision signal input to three-dimensional micro tactile sensor.
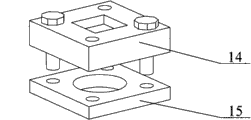
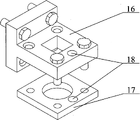
Accompanying drawing 4a is the horizontal clamping device synoptic diagram of three-dimensional micro tactile sensor of the present invention.The axial clamping structural scheme of mechanism of accompanying drawing 4b three-dimensional micro tactile sensor of the present invention, platform web joint 16 center evolution connected in stars are realized depositing of three-dimensional micro tactile sensor sensor circuit part and holding of three-dimensional micro tactile sensor.Open through hole at the center, realize the three-dimensional effective clamping with sensor fixed part of penetrating of touching little sense sensor parts.Laterally the platform web joint 14 and the sensor clamping plate 15 of clamping device leave laser via 18, realize effective tracking measurement of 11 pairs of piezoelectric ceramics displacement constraints of laser interferometer amount.Utilize Ultraprecision Machining machining screw cover and bolt, make the three-dimensional micro tactile sensor parts be fixed on the center of rotation platform, guaranteed the verticality and the bearing accuracy of three-dimensional micro tactile sensor by sensor clamping plate 15,17.
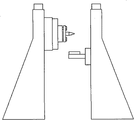
Accompanying drawing 4c is a piezoelectric ceramics clamping device of the present invention, by horizontal embedded groove and screw, realizes the effectively fixing of piezoelectric ceramics 8.
Embodiment:
The calibration implementation method of three-dimensional micro tactile sensor." clamping device 6 of the three-dimensional micro tactile sensor that the rotation platform 5 of resolution and different azimuth are installed is realized the fixing and location of three-dimensional micro tactile sensor; by piezoelectric ceramics clamping device 9 piezoelectric ceramics 8 is fixed near under the three-dimensional micro tactile sensor 7, realizes that by manual control gear train piezoelectric ceramic part contacts with zero of three-dimensional micro tactile sensor then by one 1.Whole measurement calibration process is monitored by the CCD monitor in real time by being installed in the CCD camera system 10 in the shock-isolation chamber, thereby clearly distinguishes the exposure level of three-dimensional micro tactile sensor parts and piezoelectric ceramics.After three-dimensional micro tactile sensor zero contact, using piezoelectric ceramics 8 instead provides 4 different driving voltages for three-dimensional micro tactile sensor 7, the low frequency displacement signal of output various amplitude carries out data acquisition and demonstration by signal condition system and Acquisition Circuit, sets up input---output relation figure.Laser interferometer 11 be installed in piezoelectric ceramics directly over, catoptron is placed on the piezoelectric ceramics, the setting in motion of piezoelectric ceramics is before with laser interferometer zero setting, by laser interference the constrained displacement input quantity of piezoelectric ceramics is carried out tracking measurement, with measured value and input---the output relation figure compare of analysis that collects, the actual performance of assessment three-dimensional micro tactile sensor.
The present invention for narrate accurately, convenient, be described in detail with three-dimensional micro tactile sensor, and the present invention to the calibration of one dimension, two dimension, three-dimensional, many gauge heads of array three-dimensional micro tactile sensor all within invention scope.The present invention is to all devices open and that disclose, parts and method can produce by using for reference this paper disclosure, although device of the present invention, parts and method are described by detailed implementation process, but those skilled in the art obviously can not break away from content of the present invention, the described method and apparatus of the application is spliced in the spirit and scope or change, or increase and decrease some parts, more particularly, the replacement that all are similar and change apparent to those skilled in the artly, they are regarded as being included in spirit of the present invention, among scope and the content.
Claims (4)
1. the calibration steps of a three-dimensional micro tactile sensor is characterized in that: three-dimensional micro tactile sensor stationary installation, micrometric displacement input media, CCD camera and laser interferometer are installed in shock-isolation chamber; Three-dimensional micro tactile sensor is placed on the rotation platform by different clamping devices, the micrometric displacement input media realizes that by control device the Z axle coarse motion location of three-dimensional micro tactile sensor contacts with zero of piezoelectric ceramics with sensor, piezoelectric ceramics applies the displacement constraint signal for described three-dimensional micro tactile sensor by control system output amplitude signal, signal acquiring system and last machine software by three-dimensional micro tactile sensor, set up input---output relation figure, calibration system by laser interferometer is carried out tracking measurement to the displacement constraint amount of piezoelectric ceramics, realize the test and the calibration of three-dimensional micro tactile sensor performance parameter, the concrete operations step is as follows:
(1) calibration process is finished in the shock-isolation chamber of sealing, the in-built CCD camera head, after shock-isolation chamber is closed, monitor in real time by the CCD supervision, observe the situation that contacts of three-dimensional micro tactile sensor and micro-displacement platform, prevent the damage of excessive three-dimensional micro tactile sensor that causes of piezoelectric ceramics displacement and piezoelectric ceramics;
(2) be fixed on high-precision 360 ° of rotation platforms by clamping device, realize that by the control device (comprising manual and automatic Rotation Controllers) of rotation platform the XOY arbitrary plane angle performance that laterally, axially reaches of three-dimensional micro tactile sensor is calibrated;
(3) designed axial, horizontal clamping device, realize effective clamping of three-dimensional micro tactile sensor parts, and guarantee that the three-dimensional micro tactile sensor parts have enough surpluses and realize effective beat, design the clamping device of piezoelectric ceramics and realized the interlock of piezoelectric ceramics and gear train, and effectively realized the clamping of piezoelectric ceramics;
(4) the coarse motion location on the Z-direction of the gear train of displacement input media and controller realization piezoelectric ceramics contacts with zero of piezoelectric ceramics with three-dimensional micro tactile sensor, after piezoelectric ceramics contacts with three-dimensional micro tactile sensor is zero, realize that by the piezoelectric ceramics control system displacement constraint signal pressure electroceramics displacement constraint signal to a certain degree causes that sensor output changes again, carry out data acquisition and demonstration by signal modulation and Acquisition Circuit, set up input---output relation figure;
(5) by the tracking measurement of laser interferometer to the high-precision displacement constraint signal of piezoelectric ceramics output, the displacement variable that obtains by laser interferometer measurement with collect input---output relation figure effectively compares, realize the high-precision calibration of the performance of three-dimensional micro tactile sensor.
2. the calibrating installation of the three-dimensional micro tactile sensor made of the described method of claim 1, it is characterized in that: the three-dimensional micro tactile sensor calibrating installation comprises fixed support, rotating disc manual knob, transmission manual knob, index dial, rotation platform, three-dimensional micro tactile sensor clamping device, three-dimensional micro tactile sensor, piezoelectric ceramics, piezoelectric ceramics clamping device, CCD camera system and laser interferometer; Three-dimensional micro tactile sensor is installed on the rotation platform by the three-dimensional micro tactile sensor clamping device, rotation platform is connected with index dial and is installed in fixed support top, the rotating disc manual knob is at this support bracket fastened top, piezoelectric ceramics is installed on another fixed support by the piezoelectric ceramics clamping device, the CCD camera system independently is installed in a top of the trellis, and laser interferometer is suspended on the two support bracket fastened sky.
3. the calibrating installation of three-dimensional micro tactile sensor according to claim 2 is characterized in that also comprising the micrometric displacement input media of three-dimensional micro tactile sensor: fixed support, gear train manual knob, gear train guide rail, gear train article carrying platform, piezoelectric ceramics and piezoelectric ceramics clamping device.
4. the calibrating installation of three-dimensional micro tactile sensor according to claim 2, it is characterized in that: described three-dimensional micro tactile sensor clamping device is divided into transducer transversely clamping device and sensor axis to clamping device, the transducer transversely clamping device comprises platform web joint and sensor clamping plate, and sensor axis comprises platform web joint, sensor clamping plate and laser via to clamping device; Described piezoelectric ceramics clamping device comprises platform web joint and piezoelectric ceramics grip block.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201010136209 CN101813499B (en) | 2010-03-30 | 2010-03-30 | Method and device for calibrating three-dimensional micro tactile sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201010136209 CN101813499B (en) | 2010-03-30 | 2010-03-30 | Method and device for calibrating three-dimensional micro tactile sensor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101813499A true CN101813499A (en) | 2010-08-25 |
| CN101813499B CN101813499B (en) | 2011-06-08 |
Family
ID=42620814
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 201010136209 Expired - Fee Related CN101813499B (en) | 2010-03-30 | 2010-03-30 | Method and device for calibrating three-dimensional micro tactile sensor |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN101813499B (en) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102967289A (en) * | 2012-11-01 | 2013-03-13 | 华中科技大学 | Device for calibrating static and dynamic characteristics of contact probe type contourgraph sensor |
| CN103185548A (en) * | 2011-12-31 | 2013-07-03 | 睿励科学仪器(上海)有限公司 | Auxiliary device and method for measuring platform performance parameters of semiconductor machine |
| CN104048588A (en) * | 2014-06-25 | 2014-09-17 | 中国科学院长春光学精密机械与物理研究所 | Calibration device for plate condenser displacement sensor |
| CN110017856A (en) * | 2019-03-28 | 2019-07-16 | 北京农业智能装备技术研究中心 | A kind of sensor calibrating system |
| CN111289030A (en) * | 2020-03-07 | 2020-06-16 | 中国计量科学研究院 | Capacitive sensor stability testing device |
| CN114923412A (en) * | 2022-05-24 | 2022-08-19 | 绍兴职业技术学院 | Calibration method for multi-measuring-head measuring system of shaft parts |
| CN115330641A (en) * | 2022-10-12 | 2022-11-11 | 天津大学 | Image restoration method, system and device based on MHD angular velocity sensor |
| CN115854887A (en) * | 2023-02-20 | 2023-03-28 | 四川思创博睿工业设计有限公司 | Distance measuring mechanism and method |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1067505A (en) * | 1991-06-05 | 1992-12-30 | 北京理工大学 | Combined tactile sensor |
| CN2156492Y (en) * | 1993-05-07 | 1994-02-16 | 北京理工大学 | Flexible photo touch sensor |
| EP0922431A1 (en) * | 1997-03-28 | 1999-06-16 | Seiko Epson Corporation | Tactile sense detector and notification unit |
| CN1246087A (en) * | 1997-01-29 | 2000-03-01 | 株式会社安川电机 | Device and method for calibrating robot |
| EP0997801A2 (en) * | 1998-10-27 | 2000-05-03 | Karl-Heinz Schmall | Linear drive means for machining tools |
| CN1582217A (en) * | 2001-11-01 | 2005-02-16 | 阿森姆布里昂股份有限公司 | Method of calibrating a component placement machine, device suitable for carrying out such a method, and calibration component suitable for use in such a method or device |
| CN1975322A (en) * | 2006-12-04 | 2007-06-06 | 天津大学 | Micro-geometric sense measuring device based on nano-measuring machine and micro-tactometering head |
| US20080202202A1 (en) * | 2004-09-14 | 2008-08-28 | Jun Ueda | Tactile Sensor and Use Thereof |
| CN201335681Y (en) * | 2009-01-20 | 2009-10-28 | 东南大学 | Accurate position measuring device in flexible tactile device |
-
2010
- 2010-03-30 CN CN 201010136209 patent/CN101813499B/en not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1067505A (en) * | 1991-06-05 | 1992-12-30 | 北京理工大学 | Combined tactile sensor |
| CN2156492Y (en) * | 1993-05-07 | 1994-02-16 | 北京理工大学 | Flexible photo touch sensor |
| CN1246087A (en) * | 1997-01-29 | 2000-03-01 | 株式会社安川电机 | Device and method for calibrating robot |
| EP0922431A1 (en) * | 1997-03-28 | 1999-06-16 | Seiko Epson Corporation | Tactile sense detector and notification unit |
| EP0997801A2 (en) * | 1998-10-27 | 2000-05-03 | Karl-Heinz Schmall | Linear drive means for machining tools |
| CN1582217A (en) * | 2001-11-01 | 2005-02-16 | 阿森姆布里昂股份有限公司 | Method of calibrating a component placement machine, device suitable for carrying out such a method, and calibration component suitable for use in such a method or device |
| US20080202202A1 (en) * | 2004-09-14 | 2008-08-28 | Jun Ueda | Tactile Sensor and Use Thereof |
| CN1975322A (en) * | 2006-12-04 | 2007-06-06 | 天津大学 | Micro-geometric sense measuring device based on nano-measuring machine and micro-tactometering head |
| CN201335681Y (en) * | 2009-01-20 | 2009-10-28 | 东南大学 | Accurate position measuring device in flexible tactile device |
Non-Patent Citations (2)
| Title |
|---|
| 《传感器技术》 19901031 叶世雄 触觉传感技术评述 , 第5期 2 * |
| 《液压与气动》 19881231 李建藩,等 气动触觉控制的装配机械手 , 第4期 2 * |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103185548A (en) * | 2011-12-31 | 2013-07-03 | 睿励科学仪器(上海)有限公司 | Auxiliary device and method for measuring platform performance parameters of semiconductor machine |
| CN103185548B (en) * | 2011-12-31 | 2016-03-09 | 睿励科学仪器(上海)有限公司 | Measure servicing unit and the method for the platform property parameter of semiconductor board |
| CN102967289A (en) * | 2012-11-01 | 2013-03-13 | 华中科技大学 | Device for calibrating static and dynamic characteristics of contact probe type contourgraph sensor |
| CN104048588A (en) * | 2014-06-25 | 2014-09-17 | 中国科学院长春光学精密机械与物理研究所 | Calibration device for plate condenser displacement sensor |
| CN110017856A (en) * | 2019-03-28 | 2019-07-16 | 北京农业智能装备技术研究中心 | A kind of sensor calibrating system |
| CN110017856B (en) * | 2019-03-28 | 2020-12-29 | 北京农业智能装备技术研究中心 | Sensor calibration system |
| CN111289030A (en) * | 2020-03-07 | 2020-06-16 | 中国计量科学研究院 | Capacitive sensor stability testing device |
| CN114923412A (en) * | 2022-05-24 | 2022-08-19 | 绍兴职业技术学院 | Calibration method for multi-measuring-head measuring system of shaft parts |
| CN114923412B (en) * | 2022-05-24 | 2024-03-12 | 绍兴职业技术学院 | Calibration method for shaft part multi-measuring head measuring system |
| CN115330641A (en) * | 2022-10-12 | 2022-11-11 | 天津大学 | Image restoration method, system and device based on MHD angular velocity sensor |
| CN115854887A (en) * | 2023-02-20 | 2023-03-28 | 四川思创博睿工业设计有限公司 | Distance measuring mechanism and method |
| CN115854887B (en) * | 2023-02-20 | 2023-05-16 | 四川思创博睿工业设计有限公司 | Distance measuring mechanism and method |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101813499B (en) | 2011-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101813499B (en) | Method and device for calibrating three-dimensional micro tactile sensor | |
| CN103485764B (en) | Calibrating device and calibrating method for borehole clinometer | |
| US9797700B2 (en) | Variable modelling of a measuring device | |
| CN108351203B (en) | Method for providing accurate coordinate measurement, independent reference module and coordinate measuring machine | |
| CN101881626A (en) | Self-correcting horizontal loading device | |
| CN106441153A (en) | Device and method for detecting contours of large-caliber aspheric surface components | |
| CN1884979A (en) | Motion parameter measurer | |
| CN103616127A (en) | Source tracing calibrating device and source tracing method for micro cantilever beam elastic constant | |
| CN110567639B (en) | Multi-axis force sensor calibration method and calibration device | |
| US6895682B2 (en) | Polar coordinate-based profilometer and methods | |
| CN104614254A (en) | Micropositioner rigidity measuring device and rigidity measuring method thereof | |
| CN105136418A (en) | Vibration characteristic testing and analyzing device of micro-interference moment simulation system | |
| CN102043069B (en) | Angular impact table | |
| CN111678434A (en) | Device and method for simultaneously detecting six-degree-of-freedom errors of machine tool linear shaft operation | |
| CN1975335A (en) | Universal precision displacement measurement auxiliary device and measuring method | |
| CN106123809A (en) | A kind of sub-rad level angle-measuring equipment | |
| CN109443765B (en) | RV reduction gear rigidity testing arrangement that overturns | |
| CN203488166U (en) | Calibration device of borehole clinometer | |
| CN203287264U (en) | Micro-structure mechanical property piece external-bending testing device | |
| CN106989723B (en) | Ultrahigh-precision inclination test platform | |
| CN201828245U (en) | Numerical control machine tool form and position error precision measuring device based on LabVIEW (laboratory virtual instrument engineering workbench) software | |
| CN111380486A (en) | High-resolution angular displacement measuring device and method for micro-thrust measurement | |
| CN102564862A (en) | Method for testing rigidity of chip | |
| JP2008151753A (en) | Friction tester, frictional load applying method and frictional load inspecting method | |
| CN214200176U (en) | Precision calibration device for eddy current displacement sensor in sealed environment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20110608 Termination date: 20160330 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |