CN101680760A - 物理量测量装置以及物理量测量方法 - Google Patents
物理量测量装置以及物理量测量方法 Download PDFInfo
- Publication number
- CN101680760A CN101680760A CN200880017242A CN200880017242A CN101680760A CN 101680760 A CN101680760 A CN 101680760A CN 200880017242 A CN200880017242 A CN 200880017242A CN 200880017242 A CN200880017242 A CN 200880017242A CN 101680760 A CN101680760 A CN 101680760A
- Authority
- CN
- China
- Prior art keywords
- vector
- reference point
- mentioned
- difference vector
- physical quantity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C17/00—Compasses; Devices for ascertaining true or magnetic north for navigation or surveying purposes
- G01C17/38—Testing, calibrating, or compensating of compasses
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C25/00—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass
- G01C25/005—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass initial alignment, calibration or starting-up of inertial devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/18—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration in two or more dimensions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P21/00—Testing or calibrating of apparatus or devices covered by the preceding groups
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Manufacturing & Machinery (AREA)
- Measuring Magnetic Variables (AREA)
- Indication And Recording Devices For Special Purposes And Tariff Metering Devices (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Testing Or Calibration Of Command Recording Devices (AREA)
Abstract
一种物理量测量装置,即使不是在作为测量对象的矢量物理量的大小均匀的空间内获取的测量数据群也能够估计可靠性较高的偏移。能够进一步提高估计出的偏移的可靠性。反复检测由多个成分构成的矢量物理量来获取矢量物理量数据群,根据所获取的矢量物理量数据群来算出差矢量群,基于使用了所算出的该差矢量群的规定的评价式来估计所获取的矢量物理量数据群所包含的基准点。判断所算出的差矢量群是否适于基准点的估计,根据该判断结果仅输出规定的差矢量群用于上述基准点的估计。另外,使用差矢量群来判断估计出的基准点的可靠度,根据该判断结果仅将规定的基准点作为偏移而输出。
Description
技术领域
本发明涉及一种物理量测量装置以及物理量测量方法。更详细地说,涉及一种用于根据由检测矢量物理量的传感器获取到的矢量物理量数据群来估计矢量物理量数据群所包含的偏移(Offset)的物理量测量装置以及物理量测量方法。
背景技术
已知一种在两个方向或三个方向上配置磁传感器、测量地磁场来计算方位的方位角测量装置(所谓的电子罗盘)。近年来,方位角测量装置的小型化不断发展,出现装载在以手机、PDA(Personal Digital Assistant:个人数字助理)为代表的便携设备上的例子。
在磁传感器的周边配置有扬声器等已被磁化的部件的情况下,这种方位角测量装置在检测地磁场的同时也检测从已被磁化的部件漏出的磁场,因此如果不在从测量信号中减去由地磁场以外的原因引起的信号成分之后求出方位,就会计算出错误的方位。将由地磁场以外的原因引起的稳定的信号成分称为偏移。
专利文献1公开了一种适于便携设备的方位角测量装置的偏移的估计方法。专利文献1所公开的方法是如下一种技术:便携设备根据使用者的使用状况而保持各种姿势,利用这一点,不使使用者有意识而自动估计装载在便携式设备上的方位角测量装置的偏移。
图11是说明在以往的方位角测量装置中估计偏移的方法的概念的图。
在地磁场的大小均匀的环境下,在使用者自由移动方位角测量装置1时,方位角测量装置1所获取的地磁场数据分布在以数据中所包含的偏移为中心的球面上。此外,设为方位角测量装置1的各测量轴的灵敏度相同。
(在本案中,如上述那样将数据中所包含的地磁场以外的成分称为偏移。在估计偏移时,首先,估计地磁场数据群所分布的球面(使用三轴的地磁场传感器检测地磁场的情况)的中心。将球面的中心称为基准点。接着,调查所估计出的基准点的可靠性(是否以系统所能够允许的估计误差进行估计),采用被判断为具有可靠性的基准点作为系统的偏移。在不进行可靠性判断的情况下,直接采用基准点作为系统的偏移)。
根据专利文献1,在将由方位角测量装置1反复获取到的三轴测量数据群设为(xi,yi,zi)时,估计基准点(ox,oy,oz)使评价式[数1]最小较为妥当,此时利用[数2]所示的一次联立方程式的解来求出基准点。即,
[数1]
[数2]
在此,
[数3]
N为所获取的地磁场数据个数。
专利文献8公开了求出传感器的偏移的其它方法。根据专利文献8,将连结磁场检测单元所检测到的三个点以上的磁场数据中的任意两点之间的直线的垂直平分线和连结与上述任意两点不同的其它两点之间的直线的垂直平分线的交点设为偏移。
另外,从多个磁场数据中提取多组任意的两点,按照连结各自的两点之间的每条直线来设定多条垂直平分线,并且将对上述多条垂直平分线相交叉的多个交点的坐标进行平均化而得到的交点的坐标设为偏移。
近年来,作为能够安装在便携设备上的轻量小型的三轴加速度传感器而开发出了一种使用了MEMS(Micro ElectroMechanical Systems:微机电系统)技术的半导体设备的压电电阻型三轴加速度传感器(参照专利文献7)。
在专利文献5、专利文献6中公开了一种不使使用者有意识而自动估计加速度传感器的偏移的方法。它们都是以[数2]为基础的技术,都公开了用于利用加速度特有的性质来估计可靠度较高的偏移的技术。
与图11的方位角测量装置同样地,三轴加速度传感器所检测的重力加速度测量数据分布在以加速度传感器的偏移为中心的球面上。此外,假设加速度传感器的各测量轴的灵敏度相同。
加速度传感器在检测重力加速度的同时检测运动加速度,因此为了求出可靠度较高的偏移,重力加速度与运动加速度的分离成为技术要点。
在专利文献5中,根据时间上连续的加速度测量数据来判断便携终端已静止,并仅使用此时的加速度测量数据来估计偏移。
在专利文献6中,根据时间上连续的加速度测量数据的偏差来估算加速度测量数据中包含运动加速度的概率,从而根据包含有运动加速度的测量数据也能够估计偏移。
专利文献1:PCT/JP2003/008293
专利文献2:PCT/JP2004/009324
专利文献3:PCT/JP2004/018888
专利文献4:日本特开2005-195376号公报
专利文献5:PCT/JP2005/014817
专利文献6:PCT/JP2006/326015
专利文献7:日本特开2003-101033号公报
专利文献8:日本特开2006-226810号公报
发明内容
上述的[数2]是根据在地磁场的大小均匀的空间中获取的地磁场数据群来估计地磁场数据群所包含的偏移的式子。
然而,地磁场的大小均匀的环境较少。
图12是表示在市区一边步行在直线上一边测量地磁场的大小、地磁场的倾角(Depression)以及步行方位(地磁场方位)的结果的图。
获取图12的数据时的步行速度大约为1m/秒左右,因此可以考虑大致以m(米)为横轴的单位。已知地磁场根据场所而发生变动。由于建筑物中所包含的铁等磁性体对地磁场产生吸引,因此通常地磁场在人工建筑物的周围不均匀。
因此,即使随机抽取方位角测量装置所获取的地磁场测量数据并使用[数2]来求出偏移,也未必得到正确的值。
如果使用专利文献8所公开的根据垂直平分线的交点来求出偏移的方法,如果用于设定各垂直平分线的至少两个磁场数据是在地磁场的大小相同的场所获取的,则即使获取所有磁场数据的场所的地磁场的大小不同,也能够求出传感器的偏移。
专利文献1、专利文献2、专利文献3等公开了结合[数2]来估计可靠度较高的偏移的技术。在专利文献1中,例如算出在利用[数2]进行估计中使用的测量数据群的各轴成分的最大值与最小值的差,在差为规定值以上的情况下,采用所估计出的基准点作为偏移。即使是在地磁场的大小各异的场所获取的数据群,如果数据群分布在较广的区域,则所估计的基准点的精确度提高。
另外,定期算出被估计的基准点群的各轴成分的最大值与最小值的差(偏差),在差为规定值以下的情况下,采用估计出的基准点作为偏移。当被估计的基准点的偏差较小时,在均匀的地磁场环境下获取使用于估计的测量数据群的可能性较高。
在专利文献3中,将使用于估计的测量数据群应用到平面中,算出所应用的平面与测量数据群的距离,在距离的最大值为规定值以上的情况下,采用估计出的基准点作为偏移。
在专利文献2中,公开了如下方法:使上述规定值定期地(例如在每次得到规定次数的偏移时)变得严格,或者在产生了特定的事情的情况下(例如在便携终端上安装了存储卡等磁性体部件)放宽上述规定值,由此,紧接在便携式设备的操作刚开始之后,即使可靠度较低也迅速地估计偏移,渐渐提高偏移的可靠性。
图13是表示以往的基准点估计单元300的结构的框图。
基准点估计单元300根据需要来存储由数据获取单元301获取到的数据,由基准点估计部302基于预先决定的评价式303并根据所存储的该数据群来估计在数据获取单元301输出的数据中包含的基准点,并将其作为偏移而输出。通常,调查估计出的基准点的可靠性(专利文献1、专利文献2、专利文献3),仅将被判断为具有可靠性的基准点作为偏移而输出。
然而,上述的以往方法都是用于提高采用精确度较佳的基准点作为偏移的概率的方法,也存在由于使用于估计的数据而错误地采用精确度较低的基准点的情况。当为了不错误地采用精确度较低的基准点而将规定值设定得过于严格时,直到得到偏移为止会花费非常长的时间。通常很难设定满足利用方位角测量装置的系统所要求的多个规格(所需的偏移的平均精确度、得到精确度较差的偏移的频率、直到得到偏移为止的时间等)的规定值。
即使场所发生改变,重力加速度也基本不发生变化,因此,在得到不包含运动加速度的纯粹的重力加速度数据的情况下,利用[数2]能够求出高精确度的偏移。
如专利文献5所公开的那样,能够进行便携设备的静止判定,利用静止时的测量数据来得到不包含运动加速度的测量数据。例如在规定时间T的期间内所获取的加速度测量数据群的各测量轴的偏差在规定范围TH以下的情况下,能够判断为便携设备静止。通过延长T、减小TH来降低测量数据中包含运动加速度的概率,但是直到得到静止数据为止要花费较长的时间(因而,直到求出偏移为止要花费较长的时间)。在为了加快直到估计出偏移为止的时间而宽松地设定T、TH的情况下,所得到的静止数据也有时会包含运动加速度。
即使便携终端的使用者不移动终端,也存在获取错误的重力加速度数据的情况。例如,电梯以大约0.1G(≈1m/s2)的恒定加速度进行加速减速。另外,由于技术的进步,升降过程中的振动也没有了。因此,存在电梯内静止的加速度传感器受到1.1G或者0.9G左右的恒定加速度的情况,并且满足上述静止判断基准的情况较多。
在误将便携终端掉落的情况下,便携终端所受到的加速度(取决于便携终端的旋转运动的程度,但是)大约为0G。在自由落体过程中,满足上述静止判断基准的情况较多。
以往,利用上述那样的专利文献1、专利文献2、专利文献3所公开的方位角测量装置的方法来计算估计出的基准点的可靠度,但是这些方法都无法判断是否是仅利用重力加速度估计出基准点。
因此,本发明的目的在于提供一种即使不是在作为测量对象的矢量物理量的大小均匀的空间内获取到的测量数据群也能够估计可靠性较高的偏移的矢量物理量测量装置。
另外,本发明的其它目的在于提供一种能够进一步提高估计出的偏移的可靠性的矢量物理量测量装置。
本发明是一种测量物理量的物理量测量装置,其特征在于,具备:矢量物理量检测单元,其检测由多个成分构成的矢量物理量;数据获取单元,其通过反复获取所检测到的上述矢量物理量作为矢量物理量数据来获取矢量物理量数据群;以及基准点估计单元,其根据所获取的上述矢量物理量数据群来算出差矢量群,基于使用了所算出的该差矢量群的规定的评价式来估计所获取的上述矢量物理量数据群所包含的基准点。
上述基准点估计单元也可以包括:差矢量算出部,其利用所获取的上述矢量物理量数据群的各成分的差来算出上述差矢量群;以及基准点估计部,其基于使用了所算出的上述差矢量群的上述评价式来估计在以所获取的上述矢量物理量数据群的各成分为坐标值的规定的坐标系上被确定的上述基准点的坐标,将估计出的该基准点的坐标作为偏移而输出。
上述基准点估计单元也可以还具备差矢量可靠性算出部,该差矢量可靠性算出部判断所算出的上述差矢量群的各差矢量是否适于上述基准点的估计,根据该判断结果仅输出规定的差矢量群用于上述基准点的估计。
上述基准点估计单元也可以还具备可靠性算出部,该可靠性算出部使用上述差矢量群来判断估计出的上述基准点的可靠度,根据该判断结果仅将规定的基准点作为偏移而输出。
也可以使用上述差矢量与连结该差矢量的中点和上述基准点的矢量的内积的绝对值的N次方来规定上述评价式。
也可以使用上述差矢量的中点与从上述基准点引到该差矢量的垂线的垂足点之间的距离的N次方来规定上述评价式。
也可以是上述矢量物理量检测单元是两个成分的矢量物理量检测单元,使用上述差矢量的垂直平分线与上述基准点之间的距离的N次方来规定上述评价式。
也可以是上述矢量物理量检测单元是三个成分的矢量物理量检测单元,使用上述差矢量的垂直平分面与上述基准点之间的距离的N次方来规定上述评价式。
也可以是上述矢量物理量检测单元是两个成分的矢量物理量检测单元,使用由多个上述差矢量的垂直平分线所决定的点与上述基准点之间的距离的N次方来规定上述评价式。
也可以是上述矢量物理量检测单元是三个成分的矢量物理量检测单元,使用由三个以上的上述差矢量的垂直平分面所决定的点与上述基准点之间的距离的N次方来规定上述评价式。
上述N也可以是2。
上述基准点估计单元也可以使用获取到构成在上述基准点估计中使用的差矢量的两个矢量物理量数据的时间的差在规定值以下的差矢量来估计上述基准点。
上述基准点估计单元也可以算出上述差矢量的大小,使用上述差矢量的大小为规定值以上的差矢量来估计上述基准点。
上述基准点估计单元也可以计算根据包括由上述数据获取单元新获取到的矢量物理量数据在内的两个矢量物理量数据而计算出的差矢量与根据由上述数据获取单元在上述新获取到的矢量物理量数据之前获取到的两个矢量物理量数据而计算出的差矢量所形成的角,在上述所形成的角为规定值以上的情况下,使用根据上述新获取的矢量物理量数据计算出的差矢量来估计基准点。
上述基准点估计单元也可以对使用于估计上述基准点的坐标的差矢量群中的每个差矢量算出差矢量与连结该差矢量的中点和由上述基准点估计单元估计出的基准点的矢量所形成的角,在该所形成的角与90度之差的最大值在规定值以下的情况下,将上述基准点作为偏移而输出。
也可以对使用于估计上述基准点的坐标的差矢量群中的每个差矢量算出从估计出的基准点作该差矢量的垂线而得到的垂足与该差矢量的中点之间的距离,在所算出的该距离的最大值在规定值以下的情况下,将上述基准点作为偏移而输出。
也可以是上述矢量物理量检测单元是两个成分的矢量物理量检测单元,上述基准点估计单元对使用于估计上述基准点的坐标的差矢量群中的每个差矢量算出该差矢量的垂直平分线与估计出的上述基准点之间的距离,在所算出的该距离的最大值在规定值以下的情况下,将上述基准点作为偏移而输出。
也可以是上述矢量物理量检测单元是三个成分的矢量物理量检测单元,上述基准点估计单元对使用于估计上述基准点的坐标的差矢量群中的每个差矢量算出该差矢量的垂直平分面与估计出的上述基准点之间的距离,在所算出的该距离的最大值在规定值以下的情况下,将上述基准点作为偏移而输出。
也可以将上述矢量物理量检测单元设为检测磁场作为上述物理量的磁传感器。
也可以将上述矢量物理量检测单元设为检测加速度作为上述物理量的加速度传感器。
本发明是一种测量物理量的物理量测量方法,其特征在于,具备以下工序:矢量物理量检测工序,检测由多个成分构成的矢量物理量;数据获取工序,通过反复检测并获取上述矢量物理量作为矢量物理量数据来获取矢量物理量数据群;以及基准点估计工序,根据所获取的上述矢量物理量数据群来算出差矢量群,基于使用了所算出的该差矢量群的规定的评价式来估计所获取的上述矢量物理量数据群所包含的基准点。
根据本发明,通过反复检测并获取由多个成分构成的矢量物理量作为矢量物理量数据来获取矢量物理量数据群,根据所获取的矢量物理量数据群来算出差矢量群,基于使用了所算出的该差矢量群的规定的评价式来估计所获取的矢量物理量数据群所包含的基准点,因此即使不是在作为测量对象的矢量物理量的大小均匀的空间内获取的测量数据群,也能够估计可靠性较高的偏移。
另外,根据本发明,判断所算出的差矢量群的各差矢量是否适于估计基准点,根据该判断结果仅将规定的差矢量群使用于基准点的估计,并且使用差矢量群来判断估计出的基准点的可靠度,根据该判断结果仅将规定的基准点作为偏移而输出,因此能够进一步提高估计出的偏移的可靠性。
附图说明
图1是表示作为本发明的第一实施方式的物理量测量系统的整体概要结构的框图。
图2是表示基准点估计单元的结构例的框图。
图3是表示物理量测量装置的物理量测量的概要的流程图。
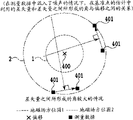
图4是说明根据在地磁场大小不均匀的环境下获取的数据群来估计偏移的方法的图。
图5是表示作为本发明的第二实施方式的图2所示的基准点估计单元的其它结构例的框图。
图6A是说明在基准点的估计中利用的差矢量和混入到测量数据中的噪声与偏移之间的关系的图,是差矢量的大小较大的情况的例子。
图6B是说明在基准点的估计中利用的差矢量和混入到测量数据中的噪声与偏移之间关系的图,是差矢量的大小较小的情况的例子。
图7A是说明在基准点的估计中利用的差矢量和构成差矢量的测量数据的获取时间差与偏移之间的关系的图,是时间差较小的情况的例子。
图7B是说明在基准点的估计中利用的差矢量和构成差矢量的测量数据的获取时间差与偏移之间的关系的图,是时间差较大的情况的例子。
图8A是说明在测量数据中混入了噪声的情况下、在基准点的估计中利用的差矢量和差矢量之间所形成的角与偏移之间的关系的图,是差矢量之间所形成的角较小的情况的例子。
图8B是说明在测量数据中混入了噪声的情况下、在基准点的估计中利用的差矢量和差矢量之间所形成的角与偏移之间的关系的图,是差矢量之间所形成的角较大的情况的例子。
图9是表示作为本发明的第三实施方式的图4所示的基准点估计部42的结构例的框图。
图10A是说明真正的偏移、估计出的基准点与从估计出的基准点引到使用于估计中的差矢量的中点的矢量之间的关系的图,是利用由没有混入噪声的测量数据构成的差矢量来估计基准点的情况的例子。
图10B是说明真正的偏移、估计出的基准点与从估计出的基准点引到使用于估计中的差矢量的中点的矢量之间的关系的图,是利用由混入了噪声的测量数据构成的差矢量来估计基准点的情况的例子。
图11是说明在以往的方位角测量装置中估计偏移的方法的概念的图。
图12是表示在市区一边步行在直线上一边测量地磁场的大小、地磁场的倾角以及步行方位(地磁场方位)的结果的图。
图13是表示以往的基准点估计单元的结构的框图。
图14是说明利用[数4]以及专利文献8所公开的方法来估计偏移的情况的概念的图。
图15是用于说明利用[数5]估计的偏移的估计偏差的图。
图16是用于说明利用文献8所公开的方法估计的偏移的估计偏差的图。
具体实施方式
下面,参照附图来详细说明本发明的实施方式。
[第一例]
根据图1~图4来说明本发明的第一实施方式。
<结构>
图1示出物理量测量系统100的整体概要结构。
物理量测量系统100由物理量测量装置10以及运算部200构成。
物理量测量装置10由矢量物理量检测单元20、数据获取单元30以及基准点估计单元40构成。
矢量物理量检测单元20检测由多个成分构成的矢量物理量。
数据获取单元30通过反复获取所检测到的矢量物理量作为矢量物理量数据来获取矢量物理量数据群。
基准点估计单元40根据所获取的矢量物理量数据群算出差矢量群,基于使用了所算出的该差矢量群的规定的评价式来估计矢量物理量数据群所包含的基准点,将所估计出的该基准点作为偏移而输出。
另外,运算部200根据由物理量测量装置10获取到的矢量物理量数据群以及估计出的偏移来算出系统所需的信息。
图2示出基准点估计单元40的结构例。
基准点估计单元40由差矢量算出部41以及基准点估计部42构成。
差矢量算出部41利用所获取的矢量物理量数据群的各成分的差来算出差矢量群(V1)。
基准点估计部42基于使用了所算出的差矢量群(V1)以及在差矢量算出中使用的矢量物理量数据群(D1)的评价式43,利用统计方法估计在以所获取的矢量物理量数据群的各成分为坐标值的规定的坐标系上被确定的基准点的坐标,将所估计出的该基准点的坐标作为偏移而输出。
下面,说明各部分的具体结构例。
矢量物理量检测单元20检测两个成分或三个成分的物理量,输出与所检测到的物理量对应的信号。作为成为对象的物理量,例如有地磁场、加速度等。
作为矢量物理量检测单元20的结构,例如能够使用检测磁场并输出与所检测到的该磁场成比例的电压的磁传感器、检测加速度并输出与所检测到的该加速度成比例的电压的加速度传感器等。
数据获取单元30将矢量物理量检测单元20所输出的信号变换为后级(基准点估计单元40以后)的各模块易于处理的形式并进行获取。
另外,数据获取单元30例如对物理量检测单元20所输出的信号进行放大,对所放大的信号进行A/D变换,输出转换后的数字数据。也有时在进行放大的同时,为了去除噪声而实施滤波处理。
通常,以磁传感器、加速度传感器等为代表的传感器输出非常小的信号,因此在进行放大、实施滤波处理来提高S/N之后,转换成在计算机等中易于处理的数字数据并输出。也可以不进行A/D变换而直接以模拟信号进行后级的处理。
<动作>
下面,说明本系统的动作。
(物理量测量的概要)
图3是表示物理量测量装置10的物理量测量的概要的流程图。
在步骤S1中,检测由多个成分构成的矢量物理量。
在步骤S2中,反复检测并获取矢量物理量来获取矢量物理量数据群。
在步骤S3中,取所获取的矢量物理量数据群的各成分的差来算出差矢量群。
在步骤S4中,基于使用了差矢量群的评价式,利用统计方法估计在以所获取的矢量物理量数据群的各成分为坐标值的规定的坐标系上被确定的基准点的坐标。由此,将估计出的该基准点的坐标作为偏移而输出。
下面,举出具体例子来说明物理量测量。
(基准点的估计)
在图2的基准点估计单元40中,根据由数据获取单元30获取的两个测量数据或者根据测量数据群计算出的两个数据来计算差矢量。然后,根据需要存储差矢量以及构成该差矢量的数据。基于预先决定的评价式并根据所存储的该差矢量群以及构成该差矢量的数据群来估计由数据获取单元输出的数据所包含的基准点,将其作为偏移而输出。
如后所述,通过将差矢量使用在评价式中,根据在矢量物理量的大小不均匀的环境下获取的数据群也能够进行偏移的估计。
构成差矢量的两个数据可以是由数据获取单元获取的数据,也可以使用为了降低噪声的影响而对测量数据群实施某种计算处理(例如,平均化)而得到的值。
(运算处理)
图1所示的物理量测量系统100在运算部200中通常接受由物理量测量装置10的数据获取单元30所获取的测量数据以及由基准点估计单元40估计出的偏移来计算系统所需的信息。
例如,在物理量检测单元是三轴磁传感器并且是以检测地磁场来算出方位角为目的的方位角测量装置的情况下,根据估计出的偏移以及所获取的测量数据来首先算出地磁场的值,进一步算出方位角。
具体地说,当设估计出的偏移为(ox,oy,oz)、具备本发明所涉及的物理量测量系统100的便携设备水平(磁传感器x测量轴、y测量轴位于水平面上)时的磁场测量数据为m=(xi,yi,zi)时,利用下式计算x测量轴相对于磁北的方位。
[数6]
例如,在矢量物理量检测单元20是三轴加速度传感器并且是以算出便携设备相对于水平面的倾斜为目的的倾斜角测量装置的情况下,根据估计出的偏移以及所获取的数据来首先计算重力加速度的值,进一步算出便携设备的倾斜角。
具体地说,当设估计出的偏移为(ox,oy,oz)、重力加速度测量数据为g=(xi,yi,zi)时,利用下式计算x测量轴相对于水平面所形成的角Φ、y测量轴相对于水平面所形成的角η。
[数7]

(偏移的估计方法)
在如上所述那样地磁场的大小不发生变化的环境下,在使用三轴的磁传感器来获取地磁场数据的情况下,地磁场的测量数据分布在球面上。在使两轴磁传感器在水平面上移动的情况下,地磁场数据分布在以偏移为中心的圆(所谓方位圆)上。下面,为了简单化而以二维的情况为主进行说明,但是三维的情况也能够同样地展开理论。
图4是说明根据在地磁场大小不均匀的环境下获取的数据群来估计偏移的方法的图。
例如,表示水平固定在汽车的仪表板上的两轴磁传感器所检测的磁场的时间变化。通常,汽车在各种磁场环境中高速通过。例如,桥大多是铁结构物,地磁场被吸引从而大小、方向都发生变化。也有时在道路中也埋有铁结构物。另外,在都市的道路的情况下,也受到道路周边的建筑物等的影响。因此,设置在汽车内的磁传感器所检测的地磁场测量值不是分布在一个圆上,而是分布在同心圆状的多个圆上。因而,使用[数2](将[数2]修改为在两个成分的情况下的式子)求出的偏移的精确度通常较差。
在图4中,为了说明本发明的概念,示出了在通过了地磁场的大小不同的三个区域的情况下所获取的磁场数据。
在地磁场的大小相同的区域中获取的两个地磁场数据的垂直平分线通过偏移。如果在地磁场的大小相同的区域中获取的两个地磁场数据的组为两组,则能够根据垂直平分线估计偏移。在实际的地磁场测量数据中包含有噪声的情形很多,并且在地磁场的大小相同的区域内不一定能够获取两个地磁场数据,因此,希望根据多个成对数据来统计地求出偏移。
将由地磁场传感器反复获取的两轴测量数据群设为mi=(xi,yi),将地磁场传感器的测量数据所包含的偏移设为o=(ox,oy)。由位于一个方位圆上的两个地磁场数据构成的差矢量与连结地磁场传感器的偏移和该差矢量的中点的矢量的内积为0。
实际上,如果场所稍有改变则地磁场的大小发生变动的情况较多,很难严格地获取相同方位圆上的两个测量数据,但是认为在场所接近(即,时间上接近)处所获取的两个数据大致处于相同大小的方位圆上也无妨。即使方位圆的大小与时间一起变动,只要能够获取位于相同(程度的)大小的方位圆上的测量数据的组,则由各测量数据的组制作的内积全部为近似0的值。所有的由测量数据的组制作的内积的绝对值的平方如下式。
[数8]
理想上S的值为0,但是实际的测量值中包含噪声、或者是没有严格地位于相同方位圆上的测量数据的组,因此为近似0的值。作为估计方法,求出使[数6]为最小值的o是适当的。作为使[数6]最小的方法,存在利用Newton-Raphson法等迭代法来渐进地求出o的方法,也能够通过求解下面的联立方程式来解析地求出o。
[数9]
由一个方位圆上的两点构成的差矢量的垂直平分线通过方位圆的中心,因此也能够定义[数8]或[数9]的评价式来代替[数6],确定o使这些评价式取得最小值。
[数10]
[数11]
[数8]对各差矢量中的每个差矢量计算由两个测量数据构成的差矢量的中点与从基准点引到差矢量的垂线的垂足点之间的距离的平方,是对各差矢量中的每个差矢量进行计算得到的值的和。
[数9]对各差矢量中的每个差矢量计算由两个测量数据构成的差矢量的垂直平分线与基准点之间的距离的平方,是对各差矢量中的每个差矢量进行计算得到的值的和。(在三个成分的物理量检测装置的情况下,为“对各差矢量中的每个差矢量计算由两个测量数据构成的差矢量的垂直平分面与基准点之间的距离的平方,是对各差矢量中的每个差矢量进行计算得到的值的和”。[数9]是矢量描述,因此两个成分也好三个成分也好都是相同的)。
[数8]和[数9]仅导出的思考过程不同,是相同的式子。
作为使[数8]和[数9]最小的方法,存在利用Newton-Raphson法等迭代法来渐进地求出o的方法。
[数6]、[数8]、[数9]为绝对值的平方和的形式,但是通常也可以是绝对值的N次方的和。例如,也可以使用下式来代替[数6]的评价式。
[数12]
通常,当N变大时计算量增加,并且计算过程中必须处理的值的范围变大,因此不适合表现数值的位数受到限制的系统。
两个差矢量的垂直平分线(物理量检测单元检测两个成分的物理量的情况。在三个成分的情况下,为三个差矢量的垂直平分面)通过基准点。因而,也可以制作数组两个差矢量的组,对每一组计算垂直平分线的交点,将对每一组计算出的交点与基准点之间的距离的和的N次方规定为评价式([数11])。
[数13]
其中,关于矢量a,aT代表行矢量。
也可以进一步扩展,定义根据多个(例如A个)差矢量确定特定的点的方法,制作数组A个差矢量的组,对每一组计算特定的点,将对每一组计算出的特定的点与基准点之间的距离的和的N次方规定为评价式。
例如,能够将通过根据三个差矢量对[数6]进行求解而得到的(ox,oy)定义为特定点。
[第二例]
根据图5~图8说明本发明的第二实施方式。此外,对与上述第一例相同的部分,省略其说明,附加同一附图标记。
图5示出图2所示的基准点估计单元40的其它结构例。
基准点估计单元40还具备差矢量可靠性算出部50。
如上述的图3所示,差矢量可靠性算出部50在步骤S10中判断所算出的差矢量群的各差矢量是否适于基准点的估计,根据该判断结果仅输出规定的差矢量群用于基准点的估计。
下面,具体说明差矢量可靠性算出部50的功能。
即使设为根据由图1的数据获取单元30获取的任意两个数据计算差矢量并求出使评价式[数6]、[数8]或者[数9]最小的o,通常也由于在测量数据中混入有噪声、或者构成差矢量的两个数据未必在一个方位圆上等理由,根据构成差矢量的两个数据的选择方法而存在偏移的估计精确度较差的情况。因此,最好仅挑选适于基准点估计的差矢量来进行基准点的估计。
图5的差矢量可靠性算出部50利用一个至多个方法来判断从差矢量算出部41输出的差矢量群的各差矢量是否适于基准点的估计,仅将由被判断为适于基准点的估计的差矢量构成的差矢量群V2以及构成差矢量群的数据群(为了计算各差矢量而使用的矢量物理量数据的集合)D2输出到基准点估计部42。
(基准点的估计例1)
图6A、图6B是说明在基准点的估计中利用的差矢量和混入到测量数据401中的噪声与偏移400之间的关系的图。
图6A是差矢量的大小较大的情况的例子,图6B是差矢量的大小较小的情况的例子。
在图6A、图6B中,示出在所选择的一组数据的一个数据中混入了噪声的情况下的差矢量的垂直平分线与方位圆的中心之间的关系。
可知即使噪声相同,差矢量的大小越小,差矢量的垂直平分线越偏离方位圆的中心。由此,可知为了降低由噪声的影响而引起的估计误差,最好在基准点估计中使用尽可能大的差矢量。
但是,如上所述那样,由于地磁场的大小因场所而发生变动,因此为了得到较大的差矢量而使用在相互远离的场所(离开的时间)获取的两个磁场数据不可取。因而,应该事先将要算出差矢量的两个磁场数据的获取时间决定为既定值以下。
下面,说明本发明与文献8的技术的差异。
在像市区那样人工建筑物较多的场所,地磁场均匀的区域非常狭窄,因而对于步行者所获取的两个磁场数据,即使磁场数据在时间上接近,也几乎都是获取它们的场所的地磁场的大小不完全一致的情况。另外,由于汽车等已磁化的移动体、屋内外的各种电流的影响,在磁场数据中混入噪声的情况较多。
图8是表示根据混入了噪声的地磁场数据而设定的两个垂直平分线的交点与真正的偏移的关系的图。在磁场数据中混入噪声的情况下,由于在偏移的估计中使用的垂直平分线而包含较大的误差。
图14是说明利用[数7]以及文献8所公开的方法来估计偏移的情况的概念的图。
在图14中将真正的地磁场传感器的偏移设为X,以虚线表示地磁场传感器的测量值所描绘的方位圆。以410表示利用[数7]并根据此时十二个点的磁场数据而估计的偏移,以500表示利用文献8而估计的偏移。
利用[数7]估计的偏移410是根据所有十二个点的磁场数据一次求出的。
关于利用文献8而得到的偏移500,首先求出由用测量数据401表示的四个点制作的两条平分线的交点,接着求出由用测量数据420表示的四个点制作的两条平分线的交点,最后求出由用测量数据430表示的四个点制作的两条平分线的交点,最后对所求出的三个交点进行平均化,由此估计偏移。在所有磁场数据中混入方位圆的半径的10%以下的噪声。
如图14所示,利用本发明的[数7]求出的偏移410与利用文献8所公开的方法而求出的偏移500不同。
在本发明的方法中,重叠在很多差矢量上的噪声的影响因其随机性而被相抵消,即使噪声重叠也能够算出接近真正值的偏移的值。
另一方面,在文献8的方法中,使用连结距离比较近的两点的垂直平分线来进一步求出比较接近的两个垂直平分线的交点,并对其进行平均化。在这种情况下,比较近的两个垂直平分线所包含的噪声的影响未必相互抵消,作为偏移的值,噪声的影响反而增加,因而容易求出与真正值差异较大的偏移的值。此时,可以认为即使对多个垂直平分线的交点进行平均化,其噪声的影响也不相互抵消,所求出的偏移与真正值的误差变大。
图15是表示利用本发明的[数7]进行一千次偏移估计而估计出的所有偏移的图。
图16是表示利用文献8的方法进行一千次偏移估计而估计出的所有偏移的图。
图15、图16每次都根据相同的磁场数据估计出偏移。当比较两个图时,明显可知本发明的方法的偏移的估计精确度较高。
(基准点的估计例2)
图7A、图7B是说明在基准点的估计中利用的差矢量和构成差矢量的测量数据401的获取时间差与偏移400之间的关系的图。
图7A是时间差较小的情况的例子,图7B是时间差较大的情况的例子。
在图7A、图7B中,示出存在如下情况:即使差矢量的大小较大,根据不位于相同的方位圆上的测量数据401计算出的差矢量的垂直平分线也远离表示偏移400的点。402是地磁场变化。
(基准点的估计例3)
图8A、图8B是说明在测量数据401中混入了噪声的情况下、在基准点的估计中利用的差矢量和差矢量之间所形成的角与偏移400之间的关系的图。
图8A是差矢量之间所形成的角较小的情况的例子,图8B是差矢量之间所形成的角较大的情况的例子。
在图8A、图8B中,示出在测量数据401中混入了噪声的情况下、在基准点的估计中利用的差矢量和差矢量之间所形成的角与偏移400之间的关系。当两个差矢量所形成的角较小(接近平行)时,有时所估计的基准点(两个差矢量的交点)远离真正的偏移。
与此相对,在两个差矢量所形成的角接近90度(直角)时,一般不容易受到噪声的影响。在根据多个差矢量来统计地估计偏移的情况下,当差矢量均等地分布在各种方位上时不容易受到噪声的影响。
由于存储器、计算能力的问题,很难将所有测量数据都保存在便携设备的存储器等中并根据所保存的测量数据来计算分布在各种方位上的差矢量。在便携设备那样的小型系统中,作为得到各种方位的差矢量的方法,存在如下的方法。
即,以由差矢量可靠性算出单元在判断为具有可靠性的前一个差矢量为基准,在该差矢量与新计算出的差矢量所形成的角在规定的角度以上时,将新计算出的差矢量设为具有可靠性的差矢量,使用于基准点估计。相反,在所形成的角在规定的角度以下时,将新计算出的差矢量作为没有可靠性的差矢量而丢弃。通过这样,避免仅利用指向相同方向的差矢量来估计基准点。
[第三例]
根据图9和图10说明本发明的第三实施方式。此外,对与上述各例相同的部分省略其说明,附加同一附图标记。
图9示出图5所示的基准点估计部42的结构例。
基准点估计部42具备估计部51以及可靠性算出部52。
估计部51基于使用了所算出的差矢量群的评价式43来估计矢量物理量数据群所包含的基准点。
如上述的图3所示,可靠性算出部52在步骤S20中,使用差矢量群来判断所估计出的该基准点的可靠度,根据该判断结果仅将规定的基准点作为偏移而输出。
下面,具体说明可靠性算出部52的功能。
如上所述,由于在测量数据中混入了噪声、或者地磁场的大小发生了变动,因此所估计的基准点中通常包含有误差。应该调查所估计出的基准点能够可靠到什么程度,仅在判断为能够信赖时将所估计出的基准点作为偏移而输出。
图10A、图10B是说明真正的偏移400和所估计出的基准点403与从所估计出的基准点403引到在估计中使用的差矢量的中点的矢量之间的关系的图。
图10A是利用由没有混入噪声的测量数据401构成的差矢量进行基准点的估计的情况的例子。图10B是利用由混入了噪声的测量数据401构成的差矢量进行基准点的估计的情况的例子。
在图10A、图10B中,在估计中使用的各差矢量是在矢量物理量的大小相同的环境下获取的并且是由没有混入噪声的测量数据401构成的情况下,所估计的基准点与真正的偏移400一致,连结各差矢量的中点和基准点的矢量与各差矢量正交。
反之,在估计中使用的差矢量是在矢量物理量的大小不同的环境下获取的或者是由混入了噪声的数据构成的情况下,所估计的基准点403与真正的偏移不一致,连结各差矢量的中点和基准点的矢量所形成的角为90度以下。
对在估计中使用的所有差矢量计算差矢量与连结估计出的基准点和差矢量的中点的矢量所形成的角。在所计算出的所形成所有的角与90度之差在规定值以下的情况下,将估计出的基准点判断为能够信赖。反之,只要所形成的角与90度之差有一个在规定值以上,就判断为估计出的基准点无法信赖而将其丢弃。由此,能够估计进一步提高了可靠度的偏移。
如上所述,作为成为本发明的测量对象的矢量物理量的浅近的例,例举出地磁场、加速度等。另外,只要人工制作的稳定磁场、电场等矢量物理量的大小变化与矢量物理量和矢量物理量检测单元的相对姿势关系的变化相比有延迟,则可以是任何物理量。
Claims (40)
1.一种物理量测量装置,用于测量物理量,其特征在于,具备:
矢量物理量检测单元,其检测由多个成分构成的矢量物理量;
数据获取单元,其通过反复获取所检测到的上述矢量物理量作为矢量物理量数据,来获取矢量物理量数据群;以及
基准点估计单元,其根据所获取的上述矢量物理量数据群算出差矢量群,基于使用了所算出的该差矢量群的规定的评价式来估计所获取的上述矢量物理量数据群所包含的基准点。
2.根据权利要求1所述的物理量测量装置,其特征在于,
上述基准点估计单元包括:
差矢量算出部,其利用所获取的上述矢量物理量数据群的各成分的差来算出上述差矢量群;以及
基准点估计部,其基于使用了所算出的上述差矢量群的上述评价式来估计在以所获取的上述矢量物理量数据群的各成分为坐标值的规定的坐标系上被确定的上述基准点的坐标,将所估计出的该基准点的坐标作为偏移而输出。
3.根据权利要求1或2所述的物理量测量装置,其特征在于,
上述基准点估计单元还具备差矢量可靠性算出部,该差矢量可靠性算出部判断所算出的上述差矢量群的各差矢量是否适于上述基准点的估计,根据该判断结果仅输出规定的差矢量群用以估计上述基准点。
4.根据权利要求1至3中的任一项所述的物理量测量装置,其特征在于,
上述基准点估计单元还具备可靠性算出部,该可靠性算出部使用上述差矢量群来判断所估计出的上述基准点的可靠度,根据该判断结果仅将规定的基准点作为偏移而输出。
5.根据权利要求1至4中的任一项所述的物理量测量装置,其特征在于,
使用上述差矢量与连结该差矢量的中点和上述基准点的矢量的内积的绝对值的N次方来规定上述评价式。
6.根据权利要求1至4中的任一项所述的物理量测量装置,其特征在于,
使用上述差矢量的中点与从上述基准点引到该差矢量的垂线的垂足点之间的距离的N次方来规定上述评价式。
7.根据权利要求1至4中的任一项所述的物理量测量装置,其特征在于,
上述矢量物理量检测单元是两个成分的矢量物理量检测单元,
使用上述差矢量的垂直平分线与上述基准点之间的距离的N次方来规定上述评价式。
8.根据权利要求1至4中的任一项所述的物理量测量装置,其特征在于,
上述矢量物理量检测单元是三个成分的矢量物理量检测单元,
使用上述差矢量的垂直平分面与上述基准点之间的距离的N次方来规定上述评价式。
9.根据权利要求1至4中的任一项所述的物理量测量装置,其特征在于,
上述矢量物理量检测单元是两个成分的矢量物理量检测单元,
使用多个由上述差矢量的垂直平分线所决定的点与上述基准点之间的距离的N次方来规定上述评价式。
10.根据权利要求1至4中的任一项所述的物理量测量装置,其特征在于,
上述矢量物理量检测单元是三个成分的矢量物理量检测单元,
使用三个以上的由上述差矢量的垂直平分面所决定的点与上述基准点之间的距离的N次方来规定上述评价式。
11.根据权利要求5至10中的任一项所述的物理量测量装置,其特征在于,
上述N是2。
12.根据权利要求1至11中的任一项所述的物理量测量装置,其特征在于,
上述基准点估计单元使用获取到构成上述差矢量的两个矢量物理量数据的时间的差为规定值以下的差矢量来估计上述基准点。
13.根据权利要求1至12中的任一项所述的物理量测量装置,其特征在于,
上述基准点估计单元算出上述差矢量的大小,
使用上述差矢量的大小为规定值以上的差矢量来估计上述基准点。
14.根据权利要求1至13中的任一项所述的物理量测量装置,其特征在于,
上述基准点估计单元计算根据包括由上述数据获取单元新获取到的矢量物理量数据在内的两个矢量物理量数据而计算出的差矢量与根据由上述数据获取单元在上述新获取到的矢量物理量数据之前获取到的两个矢量物理量数据而计算出的差矢量所形成的角,
在上述所形成的角为规定值以上的情况下,使用根据上述新获取到的矢量物理量数据计算出的差矢量来估计基准点。
15.根据权利要求1至14中的任一项所述的物理量测量装置,其特征在于,
上述基准点估计单元对使用于估计上述基准点的坐标的差矢量群中的每个差矢量算出差矢量与连结该差矢量的中点和由上述基准点估计单元估计出的基准点的矢量所形成的角,
在该所形成的角与90度之差的最大值为规定值以下的情况下,将上述基准点作为偏移而输出。
16.根据权利要求1至15中的任一项所述的物理量测量装置,其特征在于,
对使用于估计上述基准点的坐标的差矢量群中的每个差矢量算出从估计出的基准点作该差矢量的垂线而得到的垂足与该差矢量的中点之间的距离,
在所算出的该距离的最大值为规定值以下的情况下,将上述基准点作为偏移而输出。
17.根据权利要求1至16中的任一项所述的物理量测量装置,其特征在于,
上述矢量物理量检测单元是两个成分的矢量物理量检测单元,
上述基准点估计单元对使用于估计上述基准点的坐标的差矢量群中的每个差矢量算出该差矢量的垂直平分线与估计出的上述基准点之间的距离,
在所算出的该距离的最大值为规定值以下的情况下,将上述基准点作为偏移而输出。
18.根据权利要求1至17中的任一项所述的物理量测量装置,其特征在于,
上述矢量物理量检测单元是三个成分的矢量物理量检测单元,
上述基准点估计单元对使用于估计上述基准点的坐标的差矢量群中的每个差矢量算出该差矢量的垂直平分面与估计出的上述基准点之间的距离,
在所算出的该距离的最大值为规定值以下的情况下,将上述基准点作为偏移而输出。
19.根据权利要求1至18中的任一项所述的物理量测量装置,其特征在于,
上述矢量物理量检测单元是检测磁场作为上述物理量的磁传感器。
20.根据权利要求1至18中的任一项所述的物理量测量装置,其特征在于,
上述矢量物理量检测单元是检测加速度作为上述物理量的加速度传感器。
21.一种物理量测量方法,用于测量物理量,其特征在于,具备以下工序:
矢量物理量检测工序,检测由多个成分构成的矢量物理量;
数据获取工序,通过反复获取所检测到的上述矢量物理量作为矢量物理量数据,来获取矢量物理量数据群;以及
基准点估计工序,根据所获取的上述矢量物理量数据群算出差矢量群,基于使用了所算出的该差矢量群的规定的评价式来估计所获取的上述矢量物理量数据群所包含的基准点。
22.根据权利要求21所述的物理量测量方法,其特征在于,
上述基准点估计工序包括以下工序:
差矢量算出工序,利用所获取的上述矢量物理量数据群的各成分的差来算出上述差矢量群;以及
基准点估计工序,基于使用了所算出的上述差矢量群的上述评价式来估计在以所获取的上述矢量物理量数据群的各成分为坐标值的规定的坐标系上被确定的上述基准点的坐标,将估计出的该基准点的坐标作为偏移而输出。
23.根据权利要求21或22所述的物理量测量方法,其特征在于,
上述基准点估计工序还具备差矢量可靠性算出工序,在该差矢量可靠性算出工序中判断所算出的上述差矢量群的各差矢量是否适于上述基准点的估计,根据该判断结果仅输出规定的差矢量群用以估计上述基准点。
24.根据权利要求21至23中的任一项所述的物理量测量方法,其特征在于,
上述基准点估计工序还具备可靠性算出工序,在该可靠性算出工序中使用上述差矢量群来判断所估计出的上述基准点的可靠度,根据该判断结果仅将规定的基准点作为偏移而输出。
25.根据权利要求21至24中的任一项所述的物理量测量方法,其特征在于,
使用上述差矢量与连结该差矢量的中点和上述基准点的矢量的内积的绝对值的N次方来规定上述评价式。
26.根据权利要求21至24中的任一项所述的物理量测量方法,其特征在于,
使用上述差矢量的中点与从上述基准点引到该差矢量的垂线的垂足点之间的距离的N次方来规定上述评价式。
27.根据权利要求21至24中的任一项所述的物理量测量方法,其特征在于,
上述矢量物理量检测工序是两个成分的矢量物理量检测工序,
使用上述差矢量的垂直平分线与上述基准点之间的距离的N次方来规定上述评价式。
28.根据权利要求21至24中的任一项所述的物理量测量方法,其特征在于,
上述矢量物理量检测工序是三个成分的矢量物理量检测工序,
使用上述差矢量的垂直平分面与上述基准点之间的距离的N次方来规定上述评价式。
29.根据权利要求21至24中的任一项所述的物理量测量方法,其特征在于,
上述矢量物理量检测工序是两个成分的矢量物理量检测工序,
使用由多个上述差矢量的垂直平分线所决定的点与上述基准点之间的距离的N次方来规定上述评价式。
30.根据权利要求21至24中的任一项所述的物理量测量方法,其特征在于,
上述矢量物理量检测工序是三个成分的矢量物理量检测工序,
使用由三个以上的上述差矢量的垂直平分面所决定的点与上述基准点之间的距离的N次方来规定上述评价式。
31.根据权利要求25至30中的任一项所述的物理量测量方法,其特征在于,
上述N是2。
32.根据权利要求21至31中的任一项所述的物理量测量方法,其特征在于,
在上述基准点估计工序中,使用获取到构成上述差矢量的两个矢量物理量数据的时间的差为规定值以下的差矢量来估计上述基准点。
33.根据权利要求21至32中的任一项所述的物理量测量方法,其特征在于,
在上述基准点估计工序中算出上述差矢量的大小,
使用上述差矢量的大小为规定值以上的差矢量来估计上述基准点。
34.根据权利要求21至33中的任一项所述的物理量测量方法,其特征在于,
在上述基准点估计工序中,计算根据包括通过上述数据获取工序新获取到的矢量物理量数据在内的两个矢量物理量数据而计算出的差矢量与根据在上述数据获取工序中在上述新获取到的矢量物理量数据之前获取到的两个矢量物理量数据而计算出的差矢量所形成的角,
在上述所形成的角为规定值以上的情况下,使用根据上述新获取到的矢量物理量数据计算出的差矢量来估计基准点。
35.根据权利要求21至34中的任一项所述的物理量测量方法,其特征在于,
在上述基准点估计工序中,对使用于估计上述基准点的坐标的差矢量群中的每个差矢量算出差矢量与连结该差矢量的中点和在上述基准点估计工序中估计出的基准点的矢量所形成的角,
在该所形成的角与90度之差的最大值为规定值以下的情况下,将上述基准点作为偏移而输出。
36.根据权利要求21至35中的任一项所述的物理量测量方法,其特征在于,
对使用于估计上述基准点的坐标的差矢量群中的每个差矢量算出从估计出的基准点作该差矢量的垂线而得到的垂足与该差矢量的中点之间的距离,
在所算出的该距离的最大值为规定值以下的情况下,将上述基准点作为偏移而输出。
37.根据权利要求21至36中的任一项所述的物理量测量方法,其特征在于,
上述矢量物理量检测工序是两个成分的矢量物理量检测工序,
在上述基准点估计工序中,对使用于估计上述基准点的坐标的差矢量群中的每个差矢量算出该差矢量的垂直平分线与估计出的上述基准点之间的距离,
在所算出的该距离的最大值为规定值以下的情况下,将上述基准点作为偏移而输出。
38.根据权利要求21至37中的任一项所述的物理量测量方法,其特征在于,
上述矢量物理量检测工序是三个成分的矢量物理量检测工序,
在上述基准点估计工序中,对使用于估计上述基准点的坐标的差矢量群中的每个差矢量算出该差矢量的垂直平分面与估计出的上述基准点之间的距离,
在所算出的该距离的最大值为规定值以下的情况下,将上述基准点作为偏移而输出。
39.根据权利要求21至38中的任一项所述的物理量测量方法,其特征在于,
在上述矢量物理量检测工序中,利用磁传感器检测作为上述物理量的磁场。
40.根据权利要求21至38中的任一项所述的物理量测量方法,其特征在于,
在上述矢量物理量检测工序中,利用加速度传感器检测加速度作为上述物理量。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP137927/2007 | 2007-05-24 | ||
| JP2007137927 | 2007-05-24 | ||
| PCT/JP2008/059588 WO2008146757A1 (ja) | 2007-05-24 | 2008-05-23 | 物理量計測装置および物理量計測方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN101680760A true CN101680760A (zh) | 2010-03-24 |
Family
ID=40075003
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN200880017242A Pending CN101680760A (zh) | 2007-05-24 | 2008-05-23 | 物理量测量装置以及物理量测量方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20100161272A1 (zh) |
| EP (2) | EP2157405B1 (zh) |
| JP (1) | JP4787359B2 (zh) |
| CN (1) | CN101680760A (zh) |
| WO (1) | WO2008146757A1 (zh) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103017763A (zh) * | 2011-09-20 | 2013-04-03 | 雅马哈株式会社 | 状态估计设备和偏移更新方法 |
| CN104204734A (zh) * | 2013-03-15 | 2014-12-10 | 旭化成微电子株式会社 | 物理量数据校正装置以及物理量数据校正方法 |
| CN111366324A (zh) * | 2018-12-26 | 2020-07-03 | 明门(中国)幼童用品有限公司 | 电子式冲击测试机 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4875110B2 (ja) * | 2007-02-09 | 2012-02-15 | 旭化成エレクトロニクス株式会社 | 空間情報検出システム及びその検出方法並びに空間情報検出装置 |
| CN102224394B (zh) * | 2008-11-20 | 2015-04-08 | 旭化成微电子株式会社 | 物理量测量装置以及物理量测量方法 |
| CN102510994B (zh) * | 2009-09-26 | 2014-01-08 | 阿尔卑斯电气株式会社 | 地磁检测装置 |
| JP5144701B2 (ja) * | 2010-03-10 | 2013-02-13 | アルプス電気株式会社 | 磁界検知装置 |
| FR2992735B1 (fr) * | 2012-06-29 | 2015-07-03 | Movea | Procede de calibration continue d'un capteur |
| FR2998663B1 (fr) * | 2012-11-28 | 2014-11-21 | Sagem Defense Securite | Procede de calibration d'une centrale inertielle a plage de retournement mecanique limitee |
| FI126012B (fi) | 2012-12-31 | 2016-05-31 | Suunto Oy | Menetelmä ja laite suunnan määrittämiseksi magneettikentässä |
| JP6430262B2 (ja) * | 2015-01-16 | 2018-11-28 | ローム株式会社 | オフセット算出装置及びこれを用いた方位角センサ |
| JP2016153746A (ja) * | 2015-02-20 | 2016-08-25 | セイコーエプソン株式会社 | 計測装置、計測方法、および計測システム |
| JP2020020630A (ja) | 2018-07-31 | 2020-02-06 | セイコーエプソン株式会社 | 姿勢推定方法、姿勢推定装置及び移動体 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4497034A (en) * | 1981-08-05 | 1985-01-29 | Nippon Soken, Inc. | Heading detecting apparatus |
| US4807462A (en) * | 1987-04-03 | 1989-02-28 | Chrysler Motors Corporation | Method for performing automatic calibrations in an electronic compass |
| EP0604466B1 (de) * | 1991-09-17 | 1995-11-22 | Siemens Aktiengesellschaft | Verfahren zur kompensation eines magnetischen störfeldes in einem fahrzeug |
| US5297063A (en) * | 1991-12-27 | 1994-03-22 | Chrysler Corporation | Method for selecting calibration data for an auto-calibrating compass |
| US5297065A (en) * | 1991-12-27 | 1994-03-22 | Chrysler Corporation | Magnetic transient detection and calibration technique for an auto-calibrating compass |
| US6301794B1 (en) * | 1999-05-27 | 2001-10-16 | Johnson Controls, Inc. | Vehicle compass system with continuous automatic calibration |
| JP3985215B2 (ja) | 2001-09-26 | 2007-10-03 | 日立金属株式会社 | 半導体加速度センサー |
| KR20050009730A (ko) * | 2002-07-01 | 2005-01-25 | 아사히 가세이 일렉트로닉스 가부시끼가이샤 | 방위각 계측 장치 및 방위각 계측 방법 |
| CN1816730B (zh) * | 2003-07-03 | 2010-09-22 | 旭化成电子材料元件株式会社 | 方位角计测装置和方位角计测方法 |
| US7376527B2 (en) * | 2003-12-22 | 2008-05-20 | Asahi Kasei Emd Corporation | Azimuth measuring device |
| JP4638670B2 (ja) * | 2003-12-26 | 2011-02-23 | 旭化成エレクトロニクス株式会社 | 方位角計測方法および方位角計測装置 |
| JP2005207799A (ja) * | 2004-01-21 | 2005-08-04 | Nec Tokin Corp | 立体画像表示システム及び立体ナビゲーションシステム |
| JP5137229B2 (ja) * | 2004-08-12 | 2013-02-06 | 旭化成エレクトロニクス株式会社 | 加速度計測装置 |
| JP2006226810A (ja) | 2005-02-17 | 2006-08-31 | Alps Electric Co Ltd | 方位計測装置 |
| JP2006234581A (ja) * | 2005-02-24 | 2006-09-07 | Aichi Micro Intelligent Corp | 電子コンパス及び方位測定方法 |
| JP2006275524A (ja) * | 2005-03-28 | 2006-10-12 | Citizen Watch Co Ltd | 電子方位計及び記録媒体 |
| US7881900B2 (en) * | 2006-01-05 | 2011-02-01 | Asahi Kasei Emd Corporation | Acceleration measuring device |
| JP4899525B2 (ja) * | 2006-02-21 | 2012-03-21 | ヤマハ株式会社 | 磁気センサ制御装置、磁気測定装置、並びにオフセット設定方法及びプログラム |
-
2008
- 2008-05-23 EP EP08764634.5A patent/EP2157405B1/en active Active
- 2008-05-23 WO PCT/JP2008/059588 patent/WO2008146757A1/ja active Application Filing
- 2008-05-23 EP EP12187416.8A patent/EP2543961B1/en active Active
- 2008-05-23 JP JP2009516307A patent/JP4787359B2/ja active Active
- 2008-05-23 US US12/601,462 patent/US20100161272A1/en not_active Abandoned
- 2008-05-23 CN CN200880017242A patent/CN101680760A/zh active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103017763A (zh) * | 2011-09-20 | 2013-04-03 | 雅马哈株式会社 | 状态估计设备和偏移更新方法 |
| CN103017763B (zh) * | 2011-09-20 | 2015-08-12 | 雅马哈株式会社 | 状态估计设备和偏移更新方法 |
| CN104204734A (zh) * | 2013-03-15 | 2014-12-10 | 旭化成微电子株式会社 | 物理量数据校正装置以及物理量数据校正方法 |
| CN111366324A (zh) * | 2018-12-26 | 2020-07-03 | 明门(中国)幼童用品有限公司 | 电子式冲击测试机 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2157405B1 (en) | 2013-07-31 |
| JP4787359B2 (ja) | 2011-10-05 |
| EP2543961A1 (en) | 2013-01-09 |
| JPWO2008146757A1 (ja) | 2010-08-19 |
| EP2157405A4 (en) | 2012-08-22 |
| EP2157405A1 (en) | 2010-02-24 |
| WO2008146757A1 (ja) | 2008-12-04 |
| US20100161272A1 (en) | 2010-06-24 |
| EP2543961B1 (en) | 2014-12-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101680760A (zh) | 物理量测量装置以及物理量测量方法 | |
| CN102224394B (zh) | 物理量测量装置以及物理量测量方法 | |
| Zhou et al. | Use it free: Instantly knowing your phone attitude | |
| CN104884902B (zh) | 用于三轴磁力计和三轴加速度计的数据融合的方法和装置 | |
| Aggarwal | MEMS-based integrated navigation | |
| US10209078B2 (en) | Local perturbation rejection using time shifting | |
| CN100405014C (zh) | 一种载体姿态测量方法 | |
| CN103874904B (zh) | 偏移估计装置、偏移估计方法、偏移估计程序以及信息处理装置 | |
| CN104246433A (zh) | 用于移动装置中的传感器的使用中自动校准方法 | |
| CN103299247B (zh) | 用于磁近场的动态追踪及补偿的设备和方法 | |
| CN103069278B (zh) | 用于检测至少一个加速度的装置和方法、和这种装置的用途 | |
| CN102298076A (zh) | 校准三轴加速度计的方法及其装置 | |
| CN105865448A (zh) | 一种基于imu的室内定位方法 | |
| CN106153069B (zh) | 自主导航系统中的姿态修正装置和方法 | |
| CN101979277A (zh) | 卫星磁测磁控系统的全实物验证平台与工作方法 | |
| CN103808349A (zh) | 矢量传感器的误差校正方法和装置 | |
| CN108450007A (zh) | 使用廉价惯性传感器的冗余阵列的高性能惯性测量 | |
| CN105303201A (zh) | 一种基于动作感应进行手写识别的方法和系统 | |
| CN106895832B (zh) | 一种陀螺组合的角速度信号模拟方法 | |
| CN108387246A (zh) | 多节点分布式时空基准方法和装置 | |
| Rahimi et al. | Improving the calibration process of inertial measurement unit for marine applications | |
| CN108072371A (zh) | 定位方法、定位装置和电子设备 | |
| CN101949702A (zh) | 使用mems加速度计的gnss pvt质量快速自检方法 | |
| JPWO2020008869A1 (ja) | 演算処理システム、センサシステム、演算処理方法、及びプログラム | |
| Leporcq | Position Estimation Using IMU Without Tracking System |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C12 | Rejection of a patent application after its publication | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20100324 |