JP4875110B2 - 空間情報検出システム及びその検出方法並びに空間情報検出装置 - Google Patents
空間情報検出システム及びその検出方法並びに空間情報検出装置 Download PDFInfo
- Publication number
- JP4875110B2 JP4875110B2 JP2008557170A JP2008557170A JP4875110B2 JP 4875110 B2 JP4875110 B2 JP 4875110B2 JP 2008557170 A JP2008557170 A JP 2008557170A JP 2008557170 A JP2008557170 A JP 2008557170A JP 4875110 B2 JP4875110 B2 JP 4875110B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- axis
- unit
- posture
- amplitude
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/003—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring position, not involving coordinate determination
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/142—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices
- G01D5/145—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage using Hall-effect devices influenced by the relative movement between the Hall device and magnetic fields
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Measuring Magnetic Variables (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
Description
本発明において、空間情報とは姿勢、または位置の情報のことを意味している。姿勢とは、自由度の残った一部の姿勢であることもあるし、自由度の残っていない任意姿勢のこともある。
この方向の検出については、発生磁場の周波数比1:2で3軸磁気センサを使用する場合(実施形態1)、発生磁場の周波数比M:Nで3軸磁気センサを使用する場合(実施形態2)、発生磁場の周波数比M:Nで2軸磁気センサを使用する場合(実施形態3)がある。これらの各実施形態について以下に説明する。実施形態1から3では、発生磁場は1つのコイルから発生する磁場として説明する。1つのコイルから発生する磁場はコイルの中心軸に対称に広がってゆくが、実施形態1から3では、1つの方向へ発生している磁場としてみなせる範囲で情報端末の方向を検出する方法を説明する。つまり、磁場の向きと大きさが一定とみなせる均一磁場として扱える領域、あるいはコイルの中心軸上、あるいは固定した位置に、情報端末があるとした状態での実施形態となっている。
<発生磁場の周波数比1:2で3軸磁気センサを使用する場合>
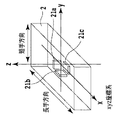
図1は、本発明の空間情報検出システムにおける実施形態1を示す全体構成図で、図中符号1は磁場発生部、1aは電源、1bはコイル、2は情報端末、20は磁場検出部、21は磁気センサ、3は演算部を示している。この実施形態1は、周波数比1:2で1つの磁場発生部を備え、磁場検出部20は、3軸の磁気センサ21を備えたものである。
Θ=ωt−π/2 ・・・・(1)
Φ=2ωt−π/2 ・・・(2)
と表すことができるとする。
ηx=φx−2×θx ・・・(式3)
と定義する。但し、0≦ηx<2πである。
θx +=ωt−π/2−2πpx + ・・・(式4)
φx +=2ωt−π/2−2πqx + ・・・(式5)
(但し、px +、qx +は0≦θx +,φx +<2πにするための整数)と測定される。そして、そのときの振幅符号判定値ηx +は(式3)より、
ηx +=π/2+2π(2px +−qx +)−2πνx + ・・・(式6)
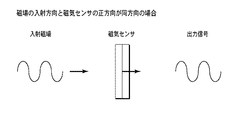
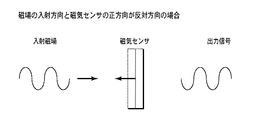
となり、一定値である(但し、νx +は0≦ηx +<2πにするための整数)。一方、磁気センサ21の正方向と、発生磁場の正方向が反対の場合、算出される第1の周波数成分と第2の周波数成分の位相をθx −,φx −とすると、
θx −=ωt−π/2+π−2πpx − ・・・(式7)
φx −=2ωt−π/2+π−2πqx − ・・・(式8)
と測定される(位相がπずれる。またpx −、qx −は0≦θx −,φx −<2πにするための整数)ので、この場合の振幅符号判定値ηx −は(式3)から
ηx −=3π/2+2π(2px −−qx −)−2πνx − ・・・(式9)
となり(但し、νx −は0≦ηx −<2πにするための整数)、これも一定値である。
Sign(Ax)=Sign(Sin(ηx)) ・・・(式10)
と表現できる。
Ax’=Sign(Sin(ηx))×Ax ・・・(式11)
Ay’=Sign(Sin(ηy))×Ay ・・・(式12)
Az’=Sign(Sin(ηz))×Az ・・・(式13)
を算出する。これによって、測定している交流磁場の第1の周波数成分の強度と向きを表す磁場ベクトル(Ax’,Ay’,Az’) Tを得ることができた(ただし、XTはXの転置を表し、このベクトルは縦ベクトルを表現している)。なお、この磁場ベクトルは、必要に応じて規格化して用いてもよい。すなわち、Ax’や磁場ベクトル(Ax’,Ay’,Az’) Tの大きさを基準にした比で磁気ベクトルデータを表現し直しても良い。そして、この得られた磁場ベクトルを方向算出部34へと送る。
Ψ=tan−1(Ay’’/Ax’’) ・・・(式14)
で、360度の方向を求めることができる。
Ψ=tan−1(Ay’/Ax’) ・・・(式15)
で求めることができる。
<発生磁場の周波数比M:Nで3軸磁気センサを使用する場合>
本発明の実施形態2における空間情報検出システムの構成は、図1と同様であるが、図1の磁場発生部1で発生させる交流磁場の、第1の周波数成分と第2の周波数成分の角周波数が、互いの偶奇が異なる正の整数M、Nを用い、それぞれMω、Nωである(最小の整数比として周波数比がM:Nである)。なお、互いの偶奇が異なるとは、どちらかが偶数であった場合に、もう一方は奇数であるということである。つまり、M:Nは偶数対奇数、または奇数対偶数である。そして、コイル1bに電源1aからの発生電流を印加することで磁場を発生することができる。発生した交流磁場の位相は、第1の周波数成分、第2の周波数成分ともに時間t=0においてそれぞれΩθ、Ωφである。すなわち、第1の周波数成分の磁場の位相をΘ、第2の周波数成分の磁場の位相をΦとすると、
Θ=Mωt+Ωθ ・・・(式16)
Φ=Nωt+Ωφ ・・・(式17)
と表すことができるとする。
ηx=M×φx−N×θx ・・・(式18)
と定義する。但し、0≦ηx<2πである。
θx +=Mωt+Ωθ−2πpx + ・・・(式19)
φx +=Nωt+Ωφ−2πqx + ・・・(式20)
(但し、px +、qx +は0≦θx +,φx +<2πにするための整数)と測定される。そして、そのときの振幅符号判定値ηx +は(式18)より、
ηx +=(MΩφ−NΩθ)+2π(Npx +−Mqx +)−2πνx +
・・・(式21)
となる(但し、νx +は0≦ηx +<2πにするための整数)。一方、磁気センサの正方向と、発生磁場の正方向が反対の場合、算出される第1の周波数成分と第2の周波数成分の位相をθx −,φx −とすると、
θx −=Mωt+Ωθ+π−2πpx − ・・・(式22)
φx −=Nωt+Ωφ+π−2πqx − ・・・(式23)
と測定される(位相がπずれる。またpx −、qx −は0≦θx −,φx −<2πにするための整数)ので、この場合の振幅符号判定値ηx −は(式18)より、
ηx −=(MΩφ−NΩθ)+π(M−N)+2π(Npx −−Mqx −)−2πνx − ・・・(式24)
となる(但し、νx −は0≦ηx −<2πにするための整数)。発明の実施の形態1と同様に、発生磁場の方向と磁気センサの向きの関係が判別できるためには、(式21)のηx +と(式24)のηx −が異なることであるので、
M−N≠2j(但し、jは整数) ・・・(式25)
かつ、
Npx +−Mqx +,Npx −−Mqx −
が常に整数であるようにM、Nを選ぶ必要がある。すなわち、MとNは互いの偶奇の異なる整数である。つまり、M−Nが偶数にならなければ(式21)のηx +と(式24)のηx −は区別が可能である。M、Nは一方が偶数で、もう一方が奇数であればよい。
の場合には、
Sign(Ax)=Sign(Sin(ηx)) ・・・(式27)
と表現できる。
Ax’=Sign(Ax)×Ax ・・・(式28)
Ay’=Sign(Ay)×Ay ・・・(式29)
Az’=Sign(Az)×Az ・・・(式30)
を算出する。
<発生磁場の周波数比M:Nで2軸磁気センサを使用する場合>
本発明の実施形態3は、周波数比M:Nで1つの磁場発生手段と2軸の磁気センサ21を有する場合を示している。情報端末2が水平面に固定されて使用される場合には、方位角センサ20aは、x軸とy軸の2軸の磁気センサ(21a,21b)のみを有するもので、発明の実施形態1、もしくは発明の実施形態2と同様の手順で磁場の方向を検出することができる。
この均一磁場と不均一磁場を用いた位置と姿勢の検出については、別々のコイルでZg軸用磁場と位置検出用磁場を発生する場合(実施形態4)、1つのコイルでZg軸用磁場と位置検出用磁場を発生する場合(実施形態5)がある。以下、これらの実施形態について以下に説明する。
<別々のコイルでZg軸用磁場と位置検出用磁場を発生する場合>
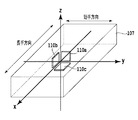
図13は、本発明の空間情報検出システムの実施形態4を示す全体構成図である。この空間情報検出システムは、磁場発生部として、異なる複数の周波数成分の位相関係が既知で、位置によって磁場の向きまたは大きさが異なっている交流の不均一磁場を発生する不均一磁場発生部(位置検出磁場発生コイル103と位置検出磁場発生用電源106)と、異なる複数の周波数成分の位相関係が既知である交流の均一磁場を発生する2つの均一磁場発生部(Xg軸ヘルムホルツコイル101とXg軸ヘルムホルツコイル用電源104及びZg軸ヘルムホルツコイル102とZg軸ヘルムホルツコイル用電源105)と、この不均一磁場発生部から発生された交流磁場と均一磁場発生部から発生された交流磁場を検出する多軸の磁気センサを有する磁場検出部111と、この磁場検出部111の姿勢情報を2つの均一磁場発生部から発生される交流の均一磁場に基づく磁場検出部111の出力信号から算出し、その姿勢情報と、不均一磁場発生部により発生される交流の不均一磁場に基づく磁場検出部111の出力信号とから磁場検出部111の位置情報を算出する演算部108とを備えている。
Θx=Mxωxt+Ωθx ・・・(式31)
Φx=Nxωxt+Ωφx ・・・(式32)
(第1の周波数成分、第2の周波数成分ともに時間t=0においてそれぞれΩθx、Ωφxであるとする)。Bz、Bpについても同様な形式で表現できるものとする。
mx=(A_x’(Mxωx),A_y’(Mxωx),A_z’(Mxωx))T・・・(式33)
となる(ただし、XTはXの転置を表し、このベクトルは縦ベクトルを表現している)。同様に、mz、mpを、各軸におけるBz、Bpのそれぞれの周波数成分中の振幅と位相から算出することができる。
ここでは、均一な交流磁場を利用して姿勢情報を算出する方法について以下に説明する。
ex=mx/|mx| ・・・(式34)
ey=mz×mx/|mz×mx| ・・・(式35)
ez=mz/|mz| ・・・(式36)
ここで、|x|は、xの絶対値を表し、×はベクトル同士の外積演算を表す演算子である。そして、X=(exeyez)で3行3列行列を表現すると、任意の絶対座標系の任意のベクトルrgは、次のような変換で端末座標系のベクトルrとして表現されることになる。
Xrg=r ・・・(式37)
すなわち、端末座標系のベクトルrから、
rg=X-1r=XTr ・・・(式38)
として、絶対座標系でのベクトルrgへと変換することができる。
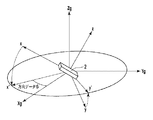
Ψ=tan-1(Ry/Rx) ・・・(式39)
α=tan-1(Rz/(Rx2+Ry2)1/2) ・・・(式40)
これらは、情報端末107の長手方向の姿勢を表している。同様に短手方向ry=(0,1,0)T及び端末座標系のz軸方向rz=(0,0,1)Tを、それぞれXTの2列目、XTの3列目の成分を利用して姿勢を表現できる。これによって、情報端末107の任意の姿勢を表す姿勢情報を求めることができた。なお、上述した方法に限らず、端末座標系から絶対座標系への変換が行うために、姿勢情報としてオイラー角(ヨー角・ピッチ角・ロール角など)などで姿勢を表現しても良い。
Jp=XTmp ・・・(式41)
そして、位置検出磁場発生コイル103からの位置検出用磁場Bpが絶対座標系のある任意の座標点rp=(X,Y,Z)でBp=(Bpx,Bpy,Bpz)Tであったとすると、
Bp=Jp ・・・(式42)
より、位置情報としてrpを求めることができる。
Bp=1/4π×(−mcoil/|rp−r0|3+3(mcoil・(rp−r0))(rp−r0)/|rp−r0|5) ・・・(式43)
として一意に求めることができる。この式を(式42)に当てはめることによって簡単に位置情報rpを求めることができる。
<1つのコイルでZg軸用磁場と位置検出用磁場を発生する場合>
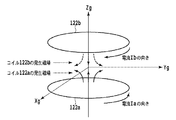
図19は、本発明の空間情報検出システムの実施形態5を示す全体構成図である。発明の実施形態4の図13と異なる構成に関して説明を行う。図19においては、発明の実施形態4の位置検出磁場発生コイル103と位置検出磁場発生用電源106がなく、Zg軸ヘルムホルツコイル用電源105の代わりに、電源125aと電源125bからなるZg軸ヘルムホルツコイル用電源部125を備えている。また、Zg軸ヘルムホルツコイル122は、コイル122aとコイル122bに区別され、それぞれ電源125aと電源125bに接続されている。この構成はコイル122aから、Zg軸方向磁場Bzだけでなく、位置検出用磁場Bpの成分を重ね合わせて発生させるように構成したものである。すなわち、Zg軸ヘルムホルツコイル122から均一磁場と不均一磁場を重ね合わせて出力するように構成したものである。
この勾配磁場を用いた位置と姿勢の検出については、均一磁場+均一・勾配合成磁場で位置と姿勢を検出する場合(実施形態6)、地磁気+均一・勾配合成磁場で位置と姿勢を検出する場合(実施形態7)、加速度センサ+ジャイロセンサ+勾配磁場で位置と姿勢を検出する場合(実施形態8)、加速度センサ+地磁気+勾配磁場で位置と姿勢を検出する場合(実施形態9)、均一・勾配合成磁場+加速度センサを使用する場合(実施形態10)がある。実施形態8乃至10において、本発明の空間情報システム並びに装置は、姿勢検出部を新たに備えている。実施形態8においては、姿勢検出部が検出する姿勢は、任意姿勢であり、姿勢検出部の出力信号だけから磁場検出部の姿勢すべてを表現できる。一方、実施形態9及び10においては、姿勢検出部が検出する姿勢は、座標系のいずれかの軸について自由度の残った姿勢であり、姿勢検出部の出力信号からは一部の姿勢を表現できる。いずれの実施形態においても、最終的に検出する姿勢とは自由度を残さずに決定できる実施形態4から5で述べたような任意姿勢のことである。これらの実施形態について以下に説明する。
<均一磁場+均一・勾配合成磁場で位置と姿勢を検出する場合>
図20は、本発明の空間情報検出システムの実施形態6を示す全体構成図である。以下、実施形態5との相違点を中心に説明する。
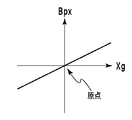
・・・(式44)
ここで、X,Y,ZはXgYgZg座標系の座標を表している。また、kはコイルの形状や電流によって決まる比例定数である。図21Bは、BpxがXg軸の座標に沿って磁場の強度が線形に変化する様子を示している。Bpy,Bpzについても同様に各軸の座標に沿って磁場の強度が線形に変化することになる(但し、Bpzは傾きが負)。従って、ある位置座標(X,Y,Z)での磁場の各軸の成分の強度が測定されれば、比例定数kによってその位置を決定できる。
ここで、Iz、Ipは電流振幅を表している。
ここで、IaとIbの電流において、Mzωz、Nzωzの周波数成分は位相が一致しており、Mpωp、Npωpの周波数成分は位相が180度ずれていることを表している。
ここで、BpのMpωpの周波数成分が絶対座標系のある任意の座標点rp=(X,Y,Z)でFp=(Fpx,Fpy,Fpz)Tとして情報端末107によって測定されたとすると、Zg軸ヘルムホルツコイル122から発生している勾配磁場Bpの勾配は(式44)から比例定数をkとして、Fpとの関係が
Bp=(kX,kY,−2kZ)T=Fp=(Fpx,Fpy,Fpz)T
・・・(式48)
となっているので、比例定数kを求めることで位置情報としてrpを求めることができる。
すなわち、交流の均一磁場の大きさ|mz|を測定すると、既知のRから(式49)によって勾配磁場の比例定数kを求めることができ、予め比例定数を測定しなくても良い。均一空間内では|mz|は一定だから、均一空間内のどこを最初に測っても比例定数kを直ちに求めて位置情報を求めることが可能となる。
<地磁気+均一・勾配合成磁場で位置と姿勢を検出する場合>
図23は、本発明の空間情報検出システムの実施形態7を示す全体構成図である。発明の実施形態6の図20と異なる構成に関して説明を行う。図23では図20におけるXg軸ヘルムホルツコイルがなく、代わりにXg軸方向に地磁気がBxとして存在している。すなわち、1つの均一磁場発生部の代わりに地磁気を利用している。均一空間は地磁気Bxと異なる複数の周波数の位相関係が既知である交流の均一磁場Bzがともに均一である空間となっている。その他の構成は発明の実施形態6と同様である。
<加速度センサ+ジャイロセンサ+勾配磁場で位置と姿勢を検出する場合>
図25は、本発明の空間情報検出システムの実施形態8を示す全体構成図である。発明の実施形態7の図23との相違点に関して説明を行う。この発明の実施形態では、情報端末107は新たに姿勢検出部140を備えている。この姿勢検出部140は、例えば、圧電素子を利用した振動ジャイロセンサと、静電容量型又はピエゾ抵抗型素子を利用した加速度センサを利用して、情報端末107(磁場検出部111)の任意の姿勢を検出する機能を備えている。この姿勢検出部140から、出力信号である姿勢データが演算部108へ出力される。この演算部108へのデータ送信は、発明の実施形態7と同様に有線でも無線でも良い。また、均一な磁場を利用しないので均一空間は表していない。
・・・(式50)
ここで、Ipは電流振幅を表している。
・・・(式51)
これらの交流電流により、Mpωp、Npωpの角周波数をもち、異なる複数の周波数成分の位相関係が既知のである交流の線形な勾配磁場BpをZg軸ヘルムホルツコイル122から発生する。
演算部108において、データ受信部117は、磁場検出部111のデータ送信部116からの磁気データと姿勢検出部140からの姿勢データを受信する。姿勢データは位置・姿勢算出部120へ送られ、磁気データはフーリエ変換部118へと送る。このフーリエ変換部118は、データ受信部117からの所望量の3軸の磁気センサ110からの磁気データを取得した後に、それらに対しFFT演算を実行し、各軸において、Zg軸ヘルムホルツコイル122から発生する交流勾配磁場Bpの複数の周波数成分(角周波数成分が、MpωpとNpωp)中の、信号強度(振幅)と位相を算出し、磁場ベクトル算出部119へと送る。磁場ベクトル算出部119は、発明の実施形態6と同様の手順により、角周波数がMpωpの周波数成分の不均一磁場ベクトルmpを算出する。
<加速度センサ+地磁気+勾配磁場で位置と姿勢を検出する場合>
発明の実施形態8において、姿勢検出部140として加速度センサを備え、発明の実施形態7において説明した地磁気を磁場検出部111で同時に検出することで情報端末107の姿勢情報を算出することも考えられる。
<均一・勾配合成磁場+加速度センサを使用する場合>
図29は、本発明の空間情報検出システムの実施形態10を示す全体構成図である。発明の実施形態7の図23と異なり、ヘルムホルツコイルがZg軸ではなく、Xg軸ヘルムホルツコイル101として配置されている。また、Zg軸ヘルムホルツコイル用電源部の代わりに、同様の機能と構成を持つXg軸ヘルムホルツコイル用電源部135があり、Xg軸ヘルムホルツコイル101は、コイル101aとコイル101bとに分かれ、Xg軸ヘルムホルツコイル用電源部135内の電源135aと電源135bにそれぞれ接続されている。また、電源135aと135bは電流制御部134に接続され、発生周期や電流量を制御されている。電源135aと電源135bから供給される交流電流Ia及びIbは、(式45)及び(式46)の均一磁場Bzを発生させる部分を均一磁場Bx用に置き換え、勾配磁場の部分は実施の形態6又は7と同様である。そして、Xg軸ヘルムホルツコイル101から、異なる複数の周波数成分の位相関係が既知である交流の均一磁場Bxと、交流の勾配磁場Bpとを同時に発生する。均一空間は、均一磁場Bxが発生している空間である。
Bp=(−2kX,kY,kZ)T・・・(式52)
を利用して位置情報を算出する。
(1)実施形態1から実施形態3、実施形態8及び実施形態9
実施形態1から実施形態3、実施形態8及び実施形態9においては、二つの周波数成分が含まれている交流磁場を一つ利用する。フーリエ変換部は、各軸における複数の周波数成分中の位相と振幅として、各軸において二つの周波数成分の位相と、少なくともいずれか一つの周波数成分の振幅を算出する。
(2)実施形態4から実施形態7、及び実施形態10
実施形態4から実施形態7、及び実施形態10においては、二つの周波数成分が含まれている交流磁場を複数利用する(均一、不均一、勾配などの複数種類の磁場を利用する)。フーリエ変換部は、各軸における複数の周波数成分中の位相と振幅として、各軸における各磁場の有する二つの周波数成分の位相を算出し、二つの周波数成分のうち少なくともいずれか一つの周波数成分の振幅を算出する。
(3)実施形態7及び実施形態9
直流磁場を利用する実施形態7及び実施形態9においては、フーリエ変換部は上記(1)又は(2)の位相と振幅に加え、各軸における直流成分(0Hzの周波数成分)の振幅を算出している。
本発明は、以上の実施形態に限られるものではなく、本発明の要旨を逸脱しない範囲の設計変更があっても本発明に含まれる。
1a 電源
1b コイル
2 情報端末
3 演算部
20 磁場検出部
20a 方位角センサ
21 磁気センサ
21a x軸磁気センサ
21b y軸磁気センサ
21c z軸磁気センサ
22 マルチプレクサ部
23 磁気センサ駆動部
24 信号増幅部
25 A/D変換部
26 データ送信部
31 データ受信部
32 フーリエ変換部
33 磁場ベクトル算出部
34 方向算出部
101 Xg軸ヘルムホルツコイル
102 Zg軸ヘルムホルツコイル
103 位置検出磁場発生コイル
104 Xg軸ヘルムホルツコイル用電源
105 Zg軸ヘルムホルツコイル用電源
106 位置検出磁場発生用電源
107 情報端末
108 演算部
109 データ表示部
110 磁気センサ
110a x軸磁気センサ
110b y軸磁気センサ
110c z軸磁気センサ
111 磁場検出部
111a 方位角センサ
112 マルチプレクサ部
113 磁気センサ駆動部
114 信号増幅部
115 A/D変換部
116 データ送信部
117 データ受信部
118 フーリエ変換部
119 磁場ベクトル算出部
120 位置・姿勢算出部
122(122a,122b) Zg軸ヘルムホルツコイル
124 電流制御部
125 Zg軸ヘルムホルツコイル用電源部
125a,125b 電源
134 電流制御部
135 Xg軸ヘルムホルツコイル用電源部
135a,135b 電源
140 姿勢検出部
Claims (26)
- 異なる複数の周波数成分の位相関係が既知である交流磁場を発生する磁場発生部と、
該磁場発生部から発生された磁場を検出する多軸の磁気センサを有する磁場検出部と、
該磁場検出部の各軸の出力信号に基づいて、前記各軸における前記複数の周波数成分中の位相と振幅を算出するフーリエ変換部と、
該フーリエ変換部からの出力信号に基づいて、前記各軸の前記複数の周波数成分の位相関係から前記各軸の振幅について符号を算出し、該符号と前記振幅から前記交流磁場の向きと大きさを表す磁場ベクトルを算出する磁場ベクトル算出部と
を備えたことを特徴とする空間情報検出システム。 - 前記磁場検出部の姿勢を検出する姿勢検出部と、
該姿勢検出部の出力信号と前記磁場ベクトル算出部の出力信号とから、前記磁場検出部の姿勢情報と位置情報を算出する位置・姿勢算出部と
を備えたことを特徴とする請求項1に記載の空間情報検出システム。 - 前記磁場検出部が、前記交流磁場に加え、直流磁場を検出する多軸の磁気センサを有し、
前記フーリエ変換部は、前記各軸における前記複数の周波数成分中の位相と振幅に加え、前記各軸における直流成分の振幅を算出し、
前記磁場ベクトル算出部が、前記交流磁場に基づく磁場ベクトルに加え、前記直流成分の振幅から前記直流磁場の向きと大きさを表す直流磁場ベクトルを算出し、
前記位置・姿勢算出部が、前記姿勢検出部からの出力信号と、前記直流磁場ベクトルから前記磁場検出部の姿勢情報を算出し、該姿勢情報と、前記磁場発生部からの交流磁場に基づく磁場ベクトルとから前記磁場検出部の位置情報を算出する
ことを特徴とする請求項2に記載の空間情報検出システム。 - 前記直流磁場は、地磁気であることを特徴とする請求項3に記載の空間情報検出システム。
- 前記磁場発生部が、異なる複数の周波数成分の位相関係が既知であり、位置によって磁場の向きまたは大きさが異なる交流の不均一磁場を少なくとも1つ発生させることを特徴とする請求項1乃至4のいずれかに記載の空間情報検出システム。
- 前記不均一磁場が、異なる複数の周波数成分の位相関係が既知である交流の勾配磁場であることを特徴とする請求項5に記載の空間情報検出システム。
- 前記磁場発生部が、異なる複数の周波数成分の位相関係が既知である交流の均一磁場と、異なる複数の周波数成分の位相関係が既知であり、位置によって磁場の向きまたは大きさが異なる交流の不均一磁場とを発生させ、
前記磁場検出部が、前記均一磁場と、前記不均一磁場とを検出し、
前記磁場ベクトル算出部が、前記フーリエ変換部からの出力信号に基づいて、前記各軸の前記複数の周波数成分の位相関係から、前記均一磁場および前記不均一磁場に対する前記各軸の振幅について符号を算出するとともに、前記各軸の振幅と前記符号から前記均一磁場及び不均一磁場の向きと大きさを表す均一磁場ベクトル及び不均一磁場ベクトルを算出し、
前記磁場ベクトル算出部から出力される前記均一磁場ベクトルから前記磁場検出部の姿勢情報を算出し、該姿勢情報と、前記磁場ベクトル算出部から出力される前記不均一磁場ベクトルとから前記磁場検出部の位置情報を算出する位置・姿勢算出部を有する
ことを特徴とする請求項1に記載の空間情報検出システム。 - 前記磁場検出部の姿勢を検出する姿勢検出部を備え、
前記位置・姿勢算出部が、前記姿勢検出部からの出力と、前記磁場ベクトル算出部から出力される前記均一磁場ベクトルとから前記磁場検出部の姿勢情報を算出し、該姿勢情報と、前記磁場ベクトル算出部から出力される前記不均一磁場ベクトルとから前記磁場検出部の位置情報を算出する
ことを特徴とする請求項7に記載の空間情報検出システム。 - 前記磁場検出部が、前記均一磁場と前記不均一磁場に加え、直流磁場を検出する多軸の磁気センサを有し、
前記フーリエ変換部は、前記各軸における前記複数の周波数成分中の位相と振幅に加え、前記各軸における直流成分の振幅を算出し、
前記磁場ベクトル算出部が、前記均一磁場ベクトル及び前記不均一磁場ベクトルに加え、前記直流成分の振幅から前記直流磁場の向きと大きさを表す直流磁場ベクトルを算出し、
前記位置・姿勢算出部が、前記磁場ベクトル算出部から出力される前記均一磁場ベクトルと、前記直流磁場ベクトルとから、前記磁場検出部の姿勢情報を算出し、該姿勢情報と、前記磁場ベクトル算出部から出力される前記不均一磁場ベクトルとから前記磁場検出部の位置情報を算出する
ことを特徴とする請求項7に記載の空間情報検出システム。 - 前記直流磁場は、地磁気であることを特徴とする請求項9に記載の空間情報検出システム。
- 前記不均一磁場は、異なる複数の周波数成分の位相関係が既知である交流の勾配磁場であることを特徴とする請求項7乃至10のいずれかに記載の空間情報検出システム。
- 前記磁場発生部は、前記均一磁場と、前記不均一磁場とを重ね合わせて発生させるコイルを有することを特徴とする請求項7乃至11のいずれかに記載の空間情報検出システム。
- 前記複数の周波数成分の整数比が、偶数対奇数であることを特徴とする請求項1乃至12のいずれかに記載の空間情報検出システム。
- 前記整数比が、2対1であることを特徴とする請求項13に記載の空間情報検出システム。
- 多軸の磁気センサを有する磁場検出部を用いて、異なる複数の周波数成分の位相関係が既知である交流磁場を検出する磁場検出ステップと、
該磁場検出ステップからの各軸の出力信号に基づいて、前記各軸における前記複数の周波数成分中の位相と振幅を算出するフーリエ変換ステップと、
該フーリエ変換ステップからの出力信号に基づいて、前記各軸の前記複数の周波数成分の位相関係から前記各軸の振幅について符号を算出し、該符号と前記振幅から前記交流磁場の向きと大きさを表す磁場ベクトルを算出する磁場ベクトル算出ステップと
を有することを特徴とする空間情報検出方法。 - 前記磁場検出部の姿勢を検出する姿勢検出ステップと、
前記姿勢検出ステップの出力信号と前記磁場ベクトル算出ステップの出力信号とから、前記磁場検出部の姿勢情報と位置情報を算出する位置・姿勢算出ステップと
を有することを特徴とする請求項15に記載の空間情報検出方法。 - 前記磁場検出ステップが、前記交流磁場に加え、直流磁場を検出し、
前記フーリエ変換ステップは、前記各軸における前記複数の周波数成分中の位相と振幅に加え、前記各軸における直流成分の振幅を算出し、
前記磁場ベクトル算出ステップが、前記交流磁場に基づく磁場ベクトルに加え、前記直流成分の振幅から前記直流磁場の向きと大きさを表す直流磁場ベクトルを算出し、
前記位置・姿勢算出ステップが、前記姿勢検出ステップからの出力信号と、前記直流磁場ベクトルから前記磁場検出部の姿勢情報を算出し、該姿勢情報と前記交流磁場に基づく磁場ベクトルとから前記磁場検出部の位置情報を算出する
ことを特徴とする請求項16に記載の空間情報検出方法。 - 前記磁場検出ステップが、異なる複数の周波数成分の位相関係が既知である交流の均一磁場と、異なる複数の周波数成分の位相関係が既知であり、位置によって磁場の向きまたは大きさが異なる交流の不均一磁場とを検出し、
前記磁場ベクトル算出ステップが、前記フーリエ変換ステップからの出力信号に基づいて、前記各軸の前記複数の周波数成分の位相関係から、前記均一磁場に加え、前記不均一磁場に対する前記各軸の振幅について符号を算出し、前記各軸の振幅と前記符号から前記均一磁場及び不均一磁場の向きと大きさを表す均一磁場ベクトル及び不均一磁場ベクトルを算出し、
前記磁場ベクトル算出ステップから出力される前記均一磁場ベクトルから前記磁場検出部の姿勢情報を算出し、該姿勢情報と、前記磁場ベクトル算出ステップから出力される前記不均一磁場ベクトルとから前記磁場検出部の位置情報を算出する位置・姿勢算出ステップを有する
ことを特徴とする請求項15に記載の空間情報検出方法。 - 前記磁場検出部の姿勢を検出する姿勢検出ステップを有し、
前記位置・姿勢算出ステップが、前記姿勢検出ステップからの出力と、前記磁場ベクトル算出部から出力される前記均一磁場ベクトルとから前記磁場検出部の姿勢情報を算出し、該姿勢情報と、前記磁場ベクトル算出ステップから出力される前記不均一磁場ベクトルとから前記磁場検出部の位置情報を算出する
ことを特徴とする請求項18に記載の空間情報検出方法。 - 前記磁場検出ステップが、前記均一磁場及び前記不均一磁場に加え、直流磁場を検出し、
前記フーリエ変換ステップは、前記各軸における前記複数の周波数成分中の位相と振幅に加え、前記各軸における直流成分の振幅を算出し、
前記磁場ベクトル算出ステップが、前記均一磁場ベクトル及び前記不均一磁場ベクトルに加え、前記直流成分の振幅から前記直流磁場の向きと大きさを表す直流磁場ベクトルを算出し、
前記位置・姿勢算出ステップが、前記磁場ベクトル算出ステップから出力される前記均一磁場ベクトルと、前記直流磁場ベクトルとから、前記磁場検出部の姿勢情報を算出し、該姿勢情報と、前記磁場ベクトル算出部から出力される前記不均一磁場ベクトルとから前記磁場検出部の位置情報を算出する
ことを特徴とする請求項18に記載の空間情報検出方法。 - 異なる複数の周波数成分の位相関係が既知である交流磁場を発生する磁場発生部から発生された磁場を検出する多軸の磁気センサを有する磁場検出部と、
該磁場検出部の各軸の出力信号に基づいて、前記各軸における前記複数の周波数成分中の位相と振幅を算出するフーリエ変換部と、
該フーリエ変換部からの出力信号に基づいて、前記各軸の前記複数の周波数成分の位相関係から前記各軸の振幅について符号を算出し、前記符号と前記振幅から前記交流磁場の向きと大きさを表す磁場ベクトルを算出する磁場ベクトル算出部と
を備えたことを特徴とする空間情報検出装置。 - 前記磁場検出部の姿勢を検出する姿勢検出部と、
前記姿勢検出部の出力信号と前記磁場ベクトル算出部の出力信号とから、前記磁場検出部の姿勢情報と位置情報を算出する位置・姿勢算出部と
を備えたことを特徴とする請求項21に記載の空間情報検出装置。 - 前記磁場検出部が、前記交流磁場に加え、直流磁場を検出する多軸の磁気センサを有し、
前記フーリエ変換部は、前記各軸における前記複数の周波数成分中の位相と振幅に加え、前記各軸における直流成分の振幅を算出し、
前記磁場ベクトル算出部が、前記交流磁場に基づく磁場ベクトルに加え、前記直流成分の振幅から前記直流磁場の向きと大きさを表す直流磁場ベクトルを算出し、
前記位置・姿勢算出部が、前記姿勢検出部からの出力信号と、前記直流磁場ベクトルとから前記磁場検出部の姿勢情報を算出し、該姿勢情報と前記交流磁場に基づく磁場ベクトルとから前記磁場検出部の位置情報を算出する
ことを特徴とする請求項22に記載の空間情報検出装置。 - 前記磁場検出部が、異なる複数の周波数成分の位相関係が既知である交流の均一磁場と、異なる複数の周波数成分の位相関係が既知であり、位置によって磁場の向きまたは大きさが異なる交流の不均一磁場とを発生させる磁場発生部から発生された磁場を検出し、
前記磁場ベクトル算出部が、前記フーリエ変換部からの出力信号に基づいて、前記各軸の前記複数の周波数成分の位相関係から、前記均一磁場に加え、前記不均一磁場に対する前記各軸の振幅について符号を算出するとともに、前記各軸の振幅と前記符号から前記均一磁場及び不均一磁場の向きと大きさを表す均一磁場ベクトル及び不均一磁場ベクトルを算出し、
前記磁場ベクトル算出部から出力される前記均一磁場ベクトルから前記磁場検出部の姿勢情報を算出し、該姿勢情報と、前記磁場ベクトル算出部から出力される前記不均一磁場ベクトルとから前記磁場検出部の位置情報を算出する位置・姿勢算出部を備える
ことを特徴とする請求項21に記載の空間情報検出装置。 - 前記磁場検出部の姿勢を検出する姿勢検出部を備え、
前記位置・姿勢算出部が、前記姿勢検出部からの出力と、前記磁場ベクトル算出部から出力される前記均一磁場ベクトルとから前記磁場検出部の姿勢情報を算出し、該姿勢情報と、前記磁場ベクトル算出部から出力される前記不均一磁場ベクトルとから前記磁場検出部の位置情報を算出する
ことを特徴とする請求項24に記載の空間情報検出装置。 - 前記磁場検出部が、前記均一磁場と前記不均一磁場に加え、直流磁場を検出する多軸の磁気センサを有し、
前記フーリエ変換部は、前記各軸における前記複数の周波数成分中の位相と振幅に加え、前記各軸における直流成分の振幅を算出し、
前記磁場ベクトル算出部が、前記均一磁場ベクトル及び前記不均一磁場ベクトルに加え、前記直流成分の振幅から前記直流磁場の向きと大きさを表す直流磁場ベクトルを算出し、
前記位置・姿勢算出部が、前記磁場ベクトル算出部から出力される前記均一磁場ベクトルと、前記直流磁場ベクトルとから、前記磁場検出部の姿勢情報を算出し、該姿勢情報と、前記磁場ベクトル算出部から出力される前記不均一磁場ベクトルとから前記磁場検出部の位置情報を算出する
ことを特徴とする請求項24に記載の空間情報検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008557170A JP4875110B2 (ja) | 2007-02-09 | 2008-02-08 | 空間情報検出システム及びその検出方法並びに空間情報検出装置 |
Applications Claiming Priority (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007030803 | 2007-02-09 | ||
| JP2007030803 | 2007-02-09 | ||
| JP2007117669 | 2007-04-26 | ||
| JP2007117669 | 2007-04-26 | ||
| JP2007299759 | 2007-11-19 | ||
| JP2007299759 | 2007-11-19 | ||
| JP2008557170A JP4875110B2 (ja) | 2007-02-09 | 2008-02-08 | 空間情報検出システム及びその検出方法並びに空間情報検出装置 |
| PCT/JP2008/052152 WO2008096856A1 (ja) | 2007-02-09 | 2008-02-08 | 空間情報検出システム及びその検出方法並びに空間情報検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2008096856A1 JPWO2008096856A1 (ja) | 2010-05-27 |
| JP4875110B2 true JP4875110B2 (ja) | 2012-02-15 |
Family
ID=39681757
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008557170A Active JP4875110B2 (ja) | 2007-02-09 | 2008-02-08 | 空間情報検出システム及びその検出方法並びに空間情報検出装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20100277163A1 (ja) |
| EP (1) | EP2110639A4 (ja) |
| JP (1) | JP4875110B2 (ja) |
| CN (1) | CN101606037B (ja) |
| WO (1) | WO2008096856A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11112229B2 (en) | 2017-06-21 | 2021-09-07 | Asahi Intecc Co., Ltd. | Magnetic type azimuth/position measurement device |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5004646B2 (ja) * | 2007-04-26 | 2012-08-22 | 旭化成エレクトロニクス株式会社 | 位置姿勢検出システム及びその検出方法並びに位置姿勢検出装置 |
| JP5386698B2 (ja) * | 2009-09-07 | 2014-01-15 | アイチ・マイクロ・インテリジェント株式会社 | 室内位置検出装置 |
| CN102302357A (zh) * | 2011-06-22 | 2012-01-04 | 清华大学 | 用于球囊内窥镜的姿态感知系统及球囊内窥镜 |
| US8717010B2 (en) * | 2011-08-19 | 2014-05-06 | Infineon Technologies Ag | Magnetic position sensors, systems and methods |
| US8952677B2 (en) * | 2011-11-04 | 2015-02-10 | Radiodetection Ltd. | Locator for locating a current carrying conductor |
| KR101833217B1 (ko) | 2011-12-07 | 2018-03-05 | 삼성전자주식회사 | 자기장 지도 기반 측위 시스템에서 이용되는 이동 단말 및 이를 이용한 위치 추정 방법 |
| AU2013209519B2 (en) | 2012-01-19 | 2017-05-25 | Cerebrotech Medical Systems, Inc. | Diagnostic system for detection of fluid changes |
| US11357417B2 (en) | 2012-01-19 | 2022-06-14 | Cerebrotech Medical Systems, Inc. | Continuous autoregulation system |
| US10743815B2 (en) | 2012-01-19 | 2020-08-18 | Cerebrotech Medical Systems, Inc. | Detection and analysis of spatially varying fluid levels using magnetic signals |
| JP5897735B2 (ja) * | 2012-03-22 | 2016-03-30 | Tdk株式会社 | 可動コイルスキャナシステム及び方法 |
| CN103356150A (zh) * | 2012-03-29 | 2013-10-23 | 上海理工大学 | 方位跟踪引导下的胶囊内窥镜磁场驱动系统 |
| CN104614692A (zh) * | 2015-02-09 | 2015-05-13 | 哈尔滨工业大学深圳研究生院 | 采用涡流技术的金属标签检测系统 |
| WO2016174506A1 (en) * | 2015-04-30 | 2016-11-03 | Bosch Car Multimedia Portugal, S.A. | Rotational angle magnetic sensor |
| EP3295728A4 (en) * | 2015-05-12 | 2019-01-30 | Purdue Research Foundation | WIRELESS POSITION DETECTION USING THE MAGNETIC FIELD OF A SINGLE TRANSMITTER |
| US11058446B2 (en) * | 2016-09-14 | 2021-07-13 | Biosense Webster (Israel) Ltd. | ENT tool antenna |
| JP6719137B2 (ja) * | 2016-11-04 | 2020-07-08 | フジデノロ株式会社 | 計測装置 |
| CN106549508B (zh) * | 2016-11-11 | 2019-01-01 | 大连理工大学 | 一种空间线极化万向交变磁场的定向无线能量传输方法 |
| CN106983487B (zh) * | 2017-03-14 | 2019-11-15 | 宜宾学院 | 无线胶囊内窥镜三维位置和三维姿态的定位系统及其定位方法 |
| CN107884726A (zh) * | 2017-11-06 | 2018-04-06 | 上海矽睿科技有限公司 | 一种用于输出磁场矢量长度的磁开关电路 |
| CN108158654B (zh) * | 2018-01-12 | 2020-06-12 | 郑州大学第一附属医院 | 一种便携式磁感应定位导向装置及其方法 |
| JP6936405B2 (ja) | 2018-12-26 | 2021-09-15 | 旭化成エレクトロニクス株式会社 | 磁場計測装置 |
| JP2019203896A (ja) * | 2019-06-11 | 2019-11-28 | パーデュー・リサーチ・ファウンデーションPurdue Research Foundation | 単一送信機の磁界を用いた無線位置検出 |
| CN110986752B (zh) * | 2019-11-26 | 2021-05-18 | 深圳市智能机器人研究院 | 基于多频式励磁的角度自修正方法及系统 |
| DE102019218702B3 (de) | 2019-12-02 | 2021-03-04 | Infineon Technologies Ag | Bestimmung einer positionsinformation über eine position eines magnetfeldgebers relativ zu einem positionssensor |
| CN111060000B (zh) * | 2019-12-11 | 2022-04-08 | 维沃移动通信有限公司 | 一种转动角度检测装置、方法及电子设备 |
| CN111766549B (zh) * | 2020-07-07 | 2023-03-31 | 北京卫星环境工程研究所 | 一种可穿戴式磁场梯度探测仪及探测方法 |
| CN113520399B (zh) * | 2021-07-12 | 2023-03-14 | 北京航空航天大学 | 一种基于亥姆霍兹线圈阵列的心脏磁场模拟系统 |
| CN117784259A (zh) * | 2024-02-23 | 2024-03-29 | 西安华舜测量设备有限责任公司 | 单分量磁场定位方法及定位系统 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6238301A (ja) * | 1985-08-13 | 1987-02-19 | コミツサリア ア レネルジイ アトミツク | 物体の空間における位置及び方向を決定する装置及び方法 |
| JPH09325003A (ja) * | 1996-06-04 | 1997-12-16 | Sekisui Chem Co Ltd | 位置検出方法 |
| JPH10108853A (ja) * | 1996-10-08 | 1998-04-28 | Eiichi Bando | 人体用の立体変位センサー |
| JPH11132704A (ja) * | 1997-10-31 | 1999-05-21 | Shimadzu Corp | 磁気式3次元ディジタイザ |
| JP2000292111A (ja) * | 1999-04-01 | 2000-10-20 | Japan Science & Technology Corp | 姿勢位置測定装置及び測定方法 |
| JP2004229943A (ja) * | 2003-01-30 | 2004-08-19 | Eiichi Bando | 顎運動の測定装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IL102218A (en) * | 1992-06-16 | 2003-06-24 | Elbit Systems Ltd | Tracker employing a rotating electromagnetic field |
| WO1998036236A1 (en) * | 1997-02-13 | 1998-08-20 | Super Dimension Ltd. | Six-degree tracking system |
| US6511417B1 (en) * | 1998-09-03 | 2003-01-28 | Olympus Optical Co., Ltd. | System for detecting the shape of an endoscope using source coils and sense coils |
| IL126284A (en) * | 1998-09-17 | 2002-12-01 | Netmor Ltd | System and method for three dimensional positioning and tracking |
| US6242907B1 (en) * | 1999-02-24 | 2001-06-05 | Graves Electronics Llc | Apparatus and method of determining the orientation of an object relative to a magnetic field |
| US6369564B1 (en) * | 1999-11-01 | 2002-04-09 | Polhemus, Inc. | Electromagnetic position and orientation tracking system with distortion compensation employing wireless sensors |
| JP5079952B2 (ja) | 2001-08-23 | 2012-11-21 | 旭化成エレクトロニクス株式会社 | 方位角計測装置 |
| US7177779B2 (en) | 2002-07-01 | 2007-02-13 | Asahi Kasei Emd Corporation | Azimuth measuring device and azimuth measuring method |
| JP2004184341A (ja) | 2002-12-05 | 2004-07-02 | Furuno Electric Co Ltd | 方位検出装置 |
| EP1601929B1 (fr) * | 2002-12-20 | 2012-01-18 | Thales | Procede et dispositif de mesure magnetique de la position et de l'orientation d'un objet mobile par rapport a une structure fixe |
| US7292948B2 (en) * | 2004-04-30 | 2007-11-06 | Alken Inc. | Magnetic position and orientation measurement system with eddy current distortion compensation |
| JP2006214979A (ja) | 2005-02-07 | 2006-08-17 | Nec Tokin Corp | 磁気式位置検出装置 |
| EP1867951B1 (en) * | 2005-03-28 | 2014-03-19 | Asahi Kasei EMD Corporation | Traveling direction measuring apparatus and traveling direction measuring method |
| KR101065871B1 (ko) * | 2006-09-12 | 2011-09-19 | 아사히 가세이 일렉트로닉스 가부시끼가이샤 | 물리량 계측 장치 및 그의 신호 처리 방법 |
| WO2008146757A1 (ja) * | 2007-05-24 | 2008-12-04 | Asahi Kasei Emd Corporation | 物理量計測装置および物理量計測方法 |
-
2008
- 2008-02-08 JP JP2008557170A patent/JP4875110B2/ja active Active
- 2008-02-08 WO PCT/JP2008/052152 patent/WO2008096856A1/ja active Application Filing
- 2008-02-08 US US12/526,338 patent/US20100277163A1/en not_active Abandoned
- 2008-02-08 EP EP08711031.8A patent/EP2110639A4/en not_active Withdrawn
- 2008-02-08 CN CN2008800045255A patent/CN101606037B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6238301A (ja) * | 1985-08-13 | 1987-02-19 | コミツサリア ア レネルジイ アトミツク | 物体の空間における位置及び方向を決定する装置及び方法 |
| JPH09325003A (ja) * | 1996-06-04 | 1997-12-16 | Sekisui Chem Co Ltd | 位置検出方法 |
| JPH10108853A (ja) * | 1996-10-08 | 1998-04-28 | Eiichi Bando | 人体用の立体変位センサー |
| JPH11132704A (ja) * | 1997-10-31 | 1999-05-21 | Shimadzu Corp | 磁気式3次元ディジタイザ |
| JP2000292111A (ja) * | 1999-04-01 | 2000-10-20 | Japan Science & Technology Corp | 姿勢位置測定装置及び測定方法 |
| JP2004229943A (ja) * | 2003-01-30 | 2004-08-19 | Eiichi Bando | 顎運動の測定装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11112229B2 (en) | 2017-06-21 | 2021-09-07 | Asahi Intecc Co., Ltd. | Magnetic type azimuth/position measurement device |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2110639A1 (en) | 2009-10-21 |
| US20100277163A1 (en) | 2010-11-04 |
| CN101606037B (zh) | 2011-05-18 |
| EP2110639A4 (en) | 2015-12-02 |
| JPWO2008096856A1 (ja) | 2010-05-27 |
| WO2008096856A1 (ja) | 2008-08-14 |
| CN101606037A (zh) | 2009-12-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4875110B2 (ja) | 空間情報検出システム及びその検出方法並びに空間情報検出装置 | |
| US11698687B2 (en) | Electronic device for use in motion detection and method for obtaining resultant deviation thereof | |
| US11712309B2 (en) | Magnetic flexible catheter tracking system and method using digital magnetometers | |
| JPH08512125A (ja) | 妨害金属がある場所で物体の位置と向きを測定する方法および装置 | |
| JP2004093562A (ja) | 地磁界センサの姿勢誤差補償装置及び方法 | |
| US10540021B2 (en) | Device for determining the position of an object in space | |
| JP5004646B2 (ja) | 位置姿勢検出システム及びその検出方法並びに位置姿勢検出装置 | |
| JP2005061969A (ja) | 方位角計測装置及び方位角計測方法 | |
| CN105241474B (zh) | 一种斜置构型惯导系统标定方法 | |
| JP5870656B2 (ja) | 軌跡演算装置および軌跡演算方法 | |
| JP2016002445A (ja) | 手術器具位置姿勢計測装置 | |
| US11029369B1 (en) | Self-leveling magnetic source | |
| Lin et al. | Mathematical models of 3D magnetic field and 3D positioning system by magnetic field | |
| JP5168730B2 (ja) | 磁気計測装置 | |
| RU2542793C1 (ru) | Устройство для определения положения объекта в пространстве | |
| US20220065661A1 (en) | Magnetic localization using a dc magnetometer | |
| JP2012233842A (ja) | 加速度センサ特性評価方法及びプログラム | |
| JP5309373B2 (ja) | 電子コンパス | |
| JP2013117442A (ja) | 方位誤差補償装置、方位誤差補償方法、方位誤差補償プログラム、誤差角度補償装置、3軸磁気センサ及びセンサモジュール | |
| JP6541800B2 (ja) | 単一送信機の磁界を用いた無線位置検出 | |
| JP2008216266A (ja) | 回転角度計測装置及び回転角度計測方法 | |
| WO2020012910A1 (ja) | 情報処理装置、情報処理方法および情報処理プログラム | |
| JP2004361237A (ja) | 傾斜計 | |
| RU137953U1 (ru) | Устройство для определения положения объекта в пространстве | |
| JP2004361236A (ja) | ジャイロスコープ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110927 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111026 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111118 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111124 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141202 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4875110 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |