CN100562674C - 用于降低制品对机械振动的敏感性的设备 - Google Patents
用于降低制品对机械振动的敏感性的设备 Download PDFInfo
- Publication number
- CN100562674C CN100562674C CNB028173473A CN02817347A CN100562674C CN 100562674 C CN100562674 C CN 100562674C CN B028173473 A CNB028173473 A CN B028173473A CN 02817347 A CN02817347 A CN 02817347A CN 100562674 C CN100562674 C CN 100562674C
- Authority
- CN
- China
- Prior art keywords
- mass block
- framework
- permanent magnet
- plane
- plane mass
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01Q—SCANNING-PROBE TECHNIQUES OR APPARATUS; APPLICATIONS OF SCANNING-PROBE TECHNIQUES, e.g. SCANNING PROBE MICROSCOPY [SPM]
- G01Q70/00—General aspects of SPM probes, their manufacture or their related instrumentation, insofar as they are not specially adapted to a single SPM technique covered by group G01Q60/00
- G01Q70/06—Probe tip arrays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B82—NANOTECHNOLOGY
- B82Y—SPECIFIC USES OR APPLICATIONS OF NANOSTRUCTURES; MEASUREMENT OR ANALYSIS OF NANOSTRUCTURES; MANUFACTURE OR TREATMENT OF NANOSTRUCTURES
- B82Y35/00—Methods or apparatus for measurement or analysis of nanostructures
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F7/00—Vibration-dampers; Shock-absorbers
- F16F7/10—Vibration-dampers; Shock-absorbers using inertia effect
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01Q—SCANNING-PROBE TECHNIQUES OR APPARATUS; APPLICATIONS OF SCANNING-PROBE TECHNIQUES, e.g. SCANNING PROBE MICROSCOPY [SPM]
- G01Q70/00—General aspects of SPM probes, their manufacture or their related instrumentation, insofar as they are not specially adapted to a single SPM technique covered by group G01Q60/00
- G01Q70/02—Probe holders
- G01Q70/04—Probe holders with compensation for temperature or vibration induced errors
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B33/00—Constructional parts, details or accessories not provided for in the other groups of this subclass
- G11B33/02—Cabinets; Cases; Stands; Disposition of apparatus therein or thereon
- G11B33/08—Insulation or absorption of undesired vibrations or sounds
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B9/00—Recording or reproducing using a method not covered by one of the main groups G11B3/00 - G11B7/00; Record carriers therefor
- G11B9/12—Recording or reproducing using a method not covered by one of the main groups G11B3/00 - G11B7/00; Record carriers therefor using near-field interactions; Record carriers therefor
- G11B9/14—Recording or reproducing using a method not covered by one of the main groups G11B3/00 - G11B7/00; Record carriers therefor using near-field interactions; Record carriers therefor using microscopic probe means, i.e. recording or reproducing by means directly associated with the tip of a microscopic electrical probe as used in Scanning Tunneling Microscopy [STM] or Atomic Force Microscopy [AFM] for inducing physical or electrical perturbations in a recording medium; Record carriers or media specially adapted for such transducing of information
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B9/00—Recording or reproducing using a method not covered by one of the main groups G11B3/00 - G11B7/00; Record carriers therefor
- G11B9/12—Recording or reproducing using a method not covered by one of the main groups G11B3/00 - G11B7/00; Record carriers therefor using near-field interactions; Record carriers therefor
- G11B9/14—Recording or reproducing using a method not covered by one of the main groups G11B3/00 - G11B7/00; Record carriers therefor using near-field interactions; Record carriers therefor using microscopic probe means, i.e. recording or reproducing by means directly associated with the tip of a microscopic electrical probe as used in Scanning Tunneling Microscopy [STM] or Atomic Force Microscopy [AFM] for inducing physical or electrical perturbations in a recording medium; Record carriers or media specially adapted for such transducing of information
- G11B9/1418—Disposition or mounting of heads or record carriers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B82—NANOTECHNOLOGY
- B82Y—SPECIFIC USES OR APPLICATIONS OF NANOSTRUCTURES; MEASUREMENT OR ANALYSIS OF NANOSTRUCTURES; MANUFACTURE OR TREATMENT OF NANOSTRUCTURES
- B82Y10/00—Nanotechnology for information processing, storage or transmission, e.g. quantum computing or single electron logic
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Nanotechnology (AREA)
- Analytical Chemistry (AREA)
- Crystallography & Structural Chemistry (AREA)
- Micromachines (AREA)
- Vibration Dampers (AREA)
- Reciprocating, Oscillating Or Vibrating Motors (AREA)
Abstract
本发明公开了一种用于降低制品对机械振动的敏感性的设备,该设备包括:框架;(300)安装在框架中、用于沿着位移的第一轴、相对于框架双方向移动的第一(m1)和第二平面质量块;可围绕固定于框架的第一支点(360)旋转的第一杠杆(330),该杠杆的一端与第一质量块(m1)连接而另一端与第二质量块(m2)连接,并且该支点(360)设置在杠杆的端点之间,其中响应沿着位移轴施加于框架上的机械振动,通过第一质量块围绕支点作用的转矩由通过第二质量块围绕支点作用的转矩抵消,使得所用由第一质量块承载的制品具有对于振动的、降低的敏感性。
Description
技术领域
本发明一般地涉及一种用于降低制品对于机械振动的敏感性的设备,并且特别涉及一种用于降低局部探测存储装置(local probe storage device)对机械振动的敏感性的设备。
背景技术
P.Vettiger等人在IBM Journal of Research and Development,Vol.44 No.3,2000年3月中发表的“The“Millipede”-More than one thousand tips for futureAFM data storage”中公开了一种局部探测存储装置的示例。千足器件(millipede device)包括一个热电阻传感器探针阵列。该阵列可以在诸如表面显现及数据存储的应用中用于表面形貌的探测。在数据存储的应用中,可以通过在表面上方移动热电阻传感器并探测传感器与表面之间的导热率随着传感器与表面之间的距离变化的改变而读出记录在表面形貌中的数据。如上述Vettiger等人的参考文献所述,千足器件包括一个制造在硅衬底上的悬臂传感器(cantilever sensor)二维阵列。每个悬臂一端附着于衬底。每个悬臂的另一端载有电阻加热元件和面向外的尖端。每个悬臂可通过行导线和列导线定址。行导线和列导线提供了通过每个悬臂的电流的选择性通道,从而加热其上的加热元件。在读取和写入操作中,阵列的尖端与载于平面衬底上、包括聚合物薄膜存储表面的存储介质相接触,并相对其移动。
通过经每个尖端向薄膜施加局部力,并结合应用数据信号通过相应的行导线和列导线选择性地加热每个尖端至足以局部地使薄膜变形的水平,在存储介质中留下槽口或凹痕,从而向存储介质写入数据。
每个加热元件还提供了热读取反馈传感器(thermal read back sensor),因为其具有与温度相关的电阻率。对于数据读取操作,向阵列中的每一行顺序施加加热信号。加热信号加热选定行中的所有加热元件,但还未达到足以使薄膜变形的温度。加热元件与表面之间的导热率根据加热元件与表面之间的距离而变化。在扫描表面上的阵列期间,当尖端移动到凹陷中时,相关的加热元件与存储介质之间的距离减小。加热元件与表面之间的介质在加热元件与存储表面之间转移热量。当相关的尖端移动到凹陷中时,每个加热元件与表面之间的热传输变得更加有效。温度以及由此导致加热元件的电阻下降。可以同时监视每一行中持续加热的加热元件的温度变化,由此便于探测所记录的位。
与这种局部探测存储器件相关的问题在于,其对于导致存储表面相对于传感器阵列的有害位移的机械振动非常敏感。因此,希望降低这种敏感性,以提高操作的稳定性。
发明内容
根据本发明,提供一种用于降低制品对机械振动的敏感性的设备,该设备包括:框架;安装在框架中、用于沿着位移的第一轴、相对于框架双方向移动的第一和第二平面质量块;可围绕固定于框架的第一支点旋转的第一杠杆,该杠杆的一端与第一质量块连接而另一端与第二质量块连接,并且该支点设置在杠杆的端点之间,其中响应沿着位移轴施加于框架上的机械振动,通过第一质量块围绕支点作用的转矩由通过第二质量块围绕支点作用的转矩抵消,使得所用由第一质量块承载的制品具有对于振动的、降低的敏感性。
第一和第二质量块可共面。或者,第一质量块可设置在平行于第二质量块且与其分开的平面内。同样地,第一和第二质量块可以至少部分地彼此重叠。
第二质量块优选包括响应输入的激励使第二质量块沿着位移轴相对于框架移动从而产生第一质量块沿着位移轴相对于框架的对应移动的激励元件。激励元件优选包括永久磁体装置,其具有平行于位移轴的磁化轴,并且与安装于框架上的导电线圈配合操作,用于响应作为线圈中电流的输入激励产生与永久磁体装置的磁化轴共轴的磁场。永久磁体装置优选包括一对设置为相同的磁极彼此相对的永久磁体,而线圈设置在该些永久磁体之间。
本发明优选实施例还包括:第三质量块,第三质量块和第一质量块安装在框架内,用于沿着在由框架限定的平面中并与位移的第一轴正交的位移的第二轴、相对于框架的双方向移动;以及,可围绕固定于框架的第二支点旋转的第二杠杆,第二杠杆的一端与第一质量块连接而另一端与第三质量块连接,并且第二支点设置在第二杠杆的端点之间,其中响应沿着位移的第二轴施加于框架上的机械振动,通过第一质量块围绕第二支点作用的转矩由通过第三质量块围绕第二支点作用的转矩抵消。
第一、第二和第三质量块可共面。或者,第一、第二和第三质量块的每一个都可设置在彼此隔开的独立平行平面中。同样地,第一、第二和第三质量块可以至少部分地彼此重叠。
优选,第二质量块包括响应输入的激励使第二质量块沿着位移的第一轴相对于框架移动从而产生第一质量块沿位移的第一轴相对于框架的对应移动的第一激励元件,而第三质量块包括响应输入的激励使第三质量块沿着位移的第二轴相对于框架移动从而产生第一质量块沿位移的第二轴相对于框架的对应移动的第二激励元件。第一激励元件优选包括第一永久磁体装置,其具有平行于位移的第一轴的磁化轴,并且与安装于框架上的第一导电线圈配合操作,用于响应作为第一线圈中电流的输入激励产生与第一永久磁体装置的磁化轴共轴的磁场,而第二激励元件包括第二永久磁体装置,其具有平行于位移的第二轴的磁化轴,并且与安装于框架上的第二导电线圈配合操作,用于响应作为第二线圈中电流的输入激励产生与第二永久磁体装置的磁化轴共轴的磁场。第一永久磁体装置优选包括一对设置为相同磁极彼此相对的第一永久磁体,且第一线圈设置在第一永久磁体之间,而第二永久磁体装置包括一对设置为相同磁极彼此相对的第二永久磁体,且第二线圈设置在第二永久磁体之间。
本发明的特别优选实施例还包括:第四平面质量块,安装于框架中,用于沿着位移的第一轴相对于框架的双方向运动;可围绕固定于框架的第三支点旋转的第三杠杆;第五平面质量块,安装于框架中,用于沿着位移的第二轴相对于框架的双方向运动;以及,可围绕固定于框架的第四支点旋转的第四杠杆,第三杠杆的一端与第一质量块连接而另一端与第四质量块连接,并且第三支点设置在第三杠杆的端点之间,第四杠杆的一端与第一质量块连接而另一端与第五质量块连接,并且第四支点设置在第四杠杆的端点之间,其中响应沿着位移的第一轴施加于框架上的机械振动,通过第一质量块围绕第三支点作用的转矩由通过第四质量块围绕第三支点作用的转矩抵消,而响应沿着位移的第二轴施加于框架上的机械振动,通过第一质量块围绕第四支点作用的转矩由通过第五质量块围绕第四支点作用的转矩抵消。
优选,第一、第二、第三、第四和第五质量块共面,第四质量块安装在框架中第一质量块的一侧,远离第二质量块,而第五质量块安装在框架中第一质量块的一侧,远离第三质量块。或者,第一、第二、第三、第四和第五质量块的每一个都可设置在彼此隔开的独立平行平面中。同样地,第一、第二、第三、第四和第五质量块可以至少部分地彼此重叠。
如上所述,第二质量块包括响应输入的激励使第二质量块沿着位移的第一轴相对于框架移动从而产生第一质量块沿位移的第一轴相对于框架的对应移动的第一激励元件,而第三质量块包括响应输入的激励使第三质量块沿着位移的第二轴相对于框架移动从而产生第一质量块沿位移的第二轴相对于框架的对应移动的第二激励元件。另外,在本发明的优选实施例中,第四质量块包括响应输入的激励使第四质量块沿着位移的第一轴相对于框架移动从而产生第一质量块沿位移的第一轴相对于框架的对应移动的第三激励元件,而第五质量块包括响应输入的激励使第五质量块沿着位移的第二轴相对于框架移动从而产生第一质量块沿位移的第二轴相对于框架的对应移动的第四激励元件。第三激励元件优选包括第三永久磁体装置,其具有平行于位移的第一轴的磁化轴,并且与安装于框架上的第三导电线圈配合操作,用于响应作为第三线圈中电流的输入激励产生与第三永久磁体装置的磁化轴共轴的磁场,而第四激励元件包括第四永久磁体装置,其具有平行于位移的第二轴的磁化轴,并且与安装于框架上的第四导电线圈配合操作,用于响应作为第四线圈中电流的输入激励产生与第四永久磁体装置的磁化轴共轴的磁场。第三永久磁体装置优选包括一对设置为相同磁极彼此相对的第三永久磁体,且第三线圈设置在第三永久磁体之间,而第四永久磁体装置包括一对设置为相同磁极彼此相对的第四永久磁体,且第四线圈设置在第四永久磁体之间。
本发明还扩展至一种局部探测存储器件,包括:存储表面;至少一个用于从该表面读取和/或向该表面写入数据的探针;用于彼此相对地移动探针和表面的扫描器,从而使探针在表面上扫描;以及,上述设备,与扫描器及存储表面和该或每个探针中的一个连接,用于降低所述存储表面和该或每个探针中的一个对于机械振动的敏感性。该或每个探针可由第一质量块承载。或者,存储表面可由第一质量块承载。
本发明更扩展至一种探测成像系统,包括:至少一个探针,用于探测表面的影像;扫描器,用于使探针和表面彼此相对地移动,从而使该或每个探针在表面上扫描;以及,上述设备,与扫描器及表面和该或每个探针中的一个连接,用于降低所述表面和该或每个探针中的一个对于机械振动的敏感性。该或每个探针可由第一质量块承载。或者,将成像的表面可由第一质量块承载。
从另一方面考虑本发明,还提供了一种定位换能器,包括:安装在框架上用于沿着位移的轴相对于框架移动的梭动器;一对永久磁体,安装于梭动器上,其相同的磁极彼此面对,且该些磁体各自的磁化轴彼此共轴且平行于位移的轴;以及,安装于框架上并设置在该些磁体之间的线圈,使得梭动器响应线圈中的电流相对于框架位移。
附图说明
下面,将参照附图仅以示例的形式介绍本发明的优选实施例,附图中:
图1为局部探测存储器件示例的简化平面图;
图2为该器件的简化侧视图;
图3为用于该器件的电磁驱动单元示例的结构图;
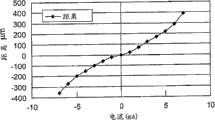
图4为对于图3所示的电磁驱动单元,作为施加电流的函数的位移的视图;
图5为用于该器件的电磁驱动单元另一示例的结构图;
图6为对于图5所示的电磁驱动单元,作为施加电流的函数的位移的视图;
图7为对于图3和5所示的电磁驱动单元,作为功率的函数的位移的视图;
图8为采用本发明技术的局部探测存储器件示例的局部平面图;
图9为采用本发明技术的抗振系统示例的简化平面图;
图10为采用本发明技术的局部探测存储器件另一示例的局部简化平面图;
图11为采用本发明技术的抗振系统另一示例的简化平面图;
图12为在箭头的方向上沿着线A-A’观察时,图11所示系统的横截面图;
图13为在箭头的方向上沿着线B-B’观察时,图11所示系统的横截面图;以及
图14为采用本发明技术的局部探测存储器件又一示例的局部简化平面图。
具体实施方式
结合参照图1和2,局部探测数据存储器件的示例包括设置在硅衬底90上的悬臂传感器10的二维阵列。行导线30和列导线40也设置在衬底上。每个传感器10通过行导线30和列导线40的不同组合而定址。存在一对与每列传感器10相关的列导线40和一条与每行传感器10相关的行导线。每个传感器10包括具有70微米左右长度和微米厚度的硅悬臂结构。悬臂脚的末端固定于衬底90。悬臂的顶点具有沿垂直于衬底90方向的移动自由度。悬臂顶点处载有电阻加热元件和背向衬底90的硅尖端。高度掺杂悬臂的脚以提供导电通路。加热元件通过掺杂悬臂的顶点至较低的程度,由此产生对于流经悬臂的电流具有增大的电阻率的区域而形成。通过悬臂的电流通路在相关的行导线与相关的列导线之间延伸。列导线中的一条经中间二极管D连接至悬臂。具体而言,二极管D的阴极连接至列导线。另一条列导线经驱动电路60连接至悬臂。二极管D的阳极和驱动电路60的输入经加热元件连接至相应的行导线。行导线30、列导线40、二极管D和驱动器60也设置在衬底90上。预先压缩悬臂以使尖端从衬底90弹性地偏开。
在操作中,将尖端靠向存储表面70压迫,存储表面70包括诸如40nm左右厚的聚甲基丙烯酸甲酯(PMMA)薄膜的聚合物层形式的平面存储介质。聚合物层载于衬底上。
通过经尖端向存储表面70施加局部力,同时通过使写入电流从对应的行导线30至对应的列导线40流经悬臂来加热尖端,而将数据写入存储介质。通过悬臂的电流使加热元件升温。热能通过导热性从加热元件流向尖端中。选择写入电流,以将尖端加热至足以局部地使存储表面70变形从而在其中留下直径约40nm的凹陷20的水平。作为示例,可见PMMA薄膜的局部形变可以通过加热尖端至700摄氏度量级的温度来实现。
加热元件还设置有热读取反馈传感器,因为其具有与温度相关的电阻率。对于数据读出操作,加热电流从对应的行导线30至对应的列导线40通过悬臂。因此,加热元件再次受热,但还处于不足以导致存储表面70变形的温度。例如,400摄氏度量级的读出温度不足以使PMMA薄膜变形,但仍提供了可行的读出性能。加热元件与存储表面70之间的导热率根据加热元件与存储表面70之间的距离变化。在扫描存储表面70上的阵列期间,当尖端移动至凹陷20中时,加热元件与存储表面70之间的距离减小。加热元件与存储表面70之间的介质在加热元件与存储表面之间转移热量。加热元件与存储表面70之间的热转移在尖端移动至凹陷20中时更加有效。温度以及由此导致加热元件的电阻率下降。可以监控持续受热的加热元件温度的变化,由此便于探测所记录的位。
上述加热电流通过向对应的行导线30施加加热电压脉冲而产生。因此,加热电流流经每个与被施以加热电压脉冲的行导线30连接的传感器10。阵列对应行中的所有加热元件由此受热。记录的数据随后并行地从受热的传感器行读出。阵列的每一行由此根据多路配置顺序读出。
阵列可相对存储表面70沿着平行于存储表面70的平面移动,使得每个尖端都可以在存储表面70对应的领域80上方扫描。每个领域80可以容纳多个凹陷20。在读出和写入两种操作期间,阵列的尖端跨过存储介质的表面70上方移动。在本发明的特别优选实施例中,阵列可通过彼此沿正交的方向作用的一对激励器相对于存储表面70运动。在本发明的特别优选实施例中,激励器包括电磁驱动单元。期望这种电磁驱动单元提供作为所施加驱动信号的函数的运动的线性和较低的功耗。
参照图3,用于上述局部探测存储器件的电磁驱动单元示例包括安装在梭动器(shuttle)120上的永久磁体110,用于激励存储表面70与承载阵列的衬底90之间的运动。梭动器120经平行弹性部件100安装在器件的框架130上。弹性部件100将梭动器120的运动限制为平行于存储表面的平面。具体而言,弹性部件100对于梭动器120向该平面外的移动是非柔韧的。磁体110的磁化轴140与由安装在框架130上的线圈160产生的磁场150共轴。由线圈160产生的磁场150和磁体110的磁化140与梭动器120的位移170的轴共线。位移170的方向可以通过反转线圈160中的电流方向而反向。在操作中,对于线圈中160中给定的电流,作用在梭动器120上的力是线圈160与磁体110之间距离的函数。在激励梭动器120期间,线圈160与磁体110之间的距离发生变化,由此产生相对于施加在线圈160上的电流的非线性运动。例如,若朝向线圈160托拽梭动器120,磁体110与线圈160之间间隙的尺寸减小。这种减小给出了比出现于从线圈160推开的梭动器120的情况中更大的力和位移。图4示出了诸如梭动器120相对于线圈160中的电流流动的位移。可理解,这种性能的非线性是不期望的,因为其导致了功率需求中相应的非线性。
参照图5,在本发明的特别优选实施例中,上述非线性通过在梭动器120上安装一对类似的永久磁体111和112并使线圈160位于期间而克服。磁体111和112安装在梭动器120上,其磁化方向141和142彼此相对,但保持与由线圈160产生的磁场的方向共轴。再次将线圈160安装在框架130上。简言之,在本发明的优选实施例中,两个这种电磁驱动单元沿着彼此正交的方向操作。
为了最小化器件的厚度,期望按平面的方式布置器件的部件。可采用各种技术来实现这一目的,包括平面批制造、注模和热压。基于这些技术,可以从诸如硅、金属或类似光学塑料的塑料的不同材料范围中的任意一种材料制得框架130。磁体111和112以及线圈160可嵌入器件的厚度中。这样具有最小化向器件平面外作用的力和转矩的优点。
在操作中,当电流通过线圈130时,磁体111和112中的一个被朝向线圈130吸引,而磁体111和112中的另一个则被从线圈130推开,由此产生梭动器120的位移。当梭动器120通过向线圈130施加电流而移动时,引力随着线圈130与磁体111和112中被吸引的一个之间的距离减小而出现的增加通过由于磁体111和112中被排斥的一个与线圈130之间距离的增加而导致的斥力减小所平衡。对称的布置使得若线圈130中的电流反向,则沿着相对的方向产生相等幅度的力和位移。图6示出了这种布置的位移作为施加于线圈130的电流的函数。参照图7,这种布置的其它优点在于获得给定位移所需的功率与上述单磁体的装置相比明显减小。
参照图8,在本发明的优选实施例中,设置有两个梭动器121和122。
梭动器121经一对平行部件101和102与框架130连接。类似地,梭动器122经一对平行的柔韧部件103和104与框架连接。在操作中,部件101和102允许梭动器121相对于框架130、背向弹性偏置、在由框架130限定的平面中、沿着平行于由框架130限定的平面的轴平移运动。具体而言,部件101和102对于由框架130限定的平面内的运动是柔韧的,但沿着延伸至由框架130限定的平面之外的方向是非柔韧的,使得梭动器121向由框架130限定的平面外的运动被抑制。此处,为简化说明,梭动器121被允许相对于框架130移动的轴以下将表示为y轴。由部件101和102作用的弹性偏置与梭动器121相对于框架130沿y轴任何方向的运动相反地作用,使得梭动器121偏置为限定于框架130内的行进范围中心处平衡位置。上述电磁驱动单元202的永久磁体部件安装在梭动器121上。驱动单元202的线圈安装在框架130上。在操作中,驱动单元202通过在线圈内施加电流而激励,使梭动器121背向由部件101和102作用的偏置、沿着y轴运动。该运动可根据线圈中的电流方向而沿两个方向中的任何一个。
类似地,部件103和104在操作中允许梭动器122相对于框架130、背向弹性偏置、在由框架130限定的平面中、沿着平行于由框架130限定的平面的轴平移运动。然而,梭动器122被允许移动的轴与梭动器121被允许移动的轴正交。部件103和104对于在由框架130限定的平面内的运动是柔韧的,但沿着延伸至由框架130限定的平面之外的方向是非柔韧的,使得梭动器122向由框架130限定的平面外的运动被抑制。此处,为简化说明,梭动器122被允许相对于框架130移动的轴以下将表示为x轴。由部件103和104作用的偏置与梭动器122相对于框架130沿x轴任何方向的运动相反地作用,使得梭动器122偏置为限定于框架130内的行进范围中心处平衡位置。上述电磁驱动单元201的永久磁体部件安装在梭动器122上。驱动单元201的线圈安装在框架130上。在操作中,驱动单元201通过在线圈内施加电流而激励,使梭动器122背向由部件103和104作用的偏置、沿着x轴运动。再次,该运动可根据线圈中的电流方向而沿两个方向中的任何一个。图8中未示出线圈。
载有存储表面70的衬底210经轭(yoke)220与框架130连接。框架130、衬底210和轭220基本共面。轭220经一对平行柔韧部件105和106固定在框架130上。部件105和106允许轭相对于框架沿着x轴并且在平行于由框架130限定的平面的平面内平移运动。部件105和106将轭220朝向框架130内行进范围中心处的平衡位置偏置。部件105和106对于由框架130限定的平面内的运动是柔韧的,但沿着延伸至由框架130限定的平面之外的方向是非柔韧的,使得轭220向由框架130限定的平面外的运动被抑制。衬底210通过一对平行的柔韧部件107和108固定在轭220上。部件107和108允许衬底210相对于轭220沿着y轴并且在平行于由框架130限定的平面的平面内平移运动。部件107和108将衬底210朝向由轭220和框架130限定的行进范围中心处的平衡位置偏置。部件107和108对于由框架130限定的平面内的运动是柔韧的,但沿着延伸至由框架130限定的平面之外的方向是非柔韧的,使得梭动器121向由框架130限定的平面外的运动被抑制。
梭动器121经杠杆241以及支柱251和252与衬底210连接。类似地,梭动器122杠杆242以及支柱253和254与衬底210连接。杠杆241可以围绕固定在框架130上的支点232旋转。一对弹性的柔韧元件261和262限定了支点232相对于框架130的位置。类似地,杠杆242可以围绕固定在框架130上的支点231旋转。一对弹性的柔韧元件263和264限定了支点231相对于框架130的位置。部件101至108、支柱251至254、以及部件261至264基本能够耐受张力的伸展和压缩。然而,使部件261至264弹性变形以利于对应杠杆241和242围绕对应支点231和232的旋转。
在操作中,梭动器121在驱动单元202的激励下产生的位移通过支柱252转移至杠杆241。部件101和102在由框架130限定的平面内弯曲,以承受该位移。杠杆241响应该位移围绕支点232旋转。梭动器121相对于框架130的平移位移由此转化为杠杆241的旋转位移。杠杆241的旋转位移随后通过支柱252传递至衬底210。具体而言,支柱252根据梭动器121相对于框架130的位移方向拖动或推动衬底210。衬底210由此响应梭动器121的位移沿着y轴方向相对于轭220发生移动。部件107和108在由框架130限定的平面内弯曲,以承受该位移。
在操作中,梭动器122在驱动单元201的激励下产生的位移通过支柱254转移至杠杆242。部件103和104在由框架130限定的平面内弯曲,以承受该位移。杠杆242响应该位移围绕支点231旋转。梭动器122相对于框架的平移位移由此转化为杠杆242的旋转位移。杠杆242的旋转位移随后通过支柱253传递至衬底210。具体而言,支柱253根据梭动器122相对于框架130的位移方向拖动或推动衬底210。经支柱253作用在衬底210上的拖动或推动力通过部件107和108传递至轭220。轭220和衬底210由此响应梭动器121的位移沿着x轴方向相对于框架130发生移动。部件105和106在由框架130限定的平面内弯曲,以承受该位移。
在驱动单元201和202的控制下,轭220允许衬底220相对于框架130沿着平行于由框架130限定的平面的正交方向独立移动。这使得设置在衬底210上的存储表面70能够相对于阵列移动,由此便于阵列的尖端如上所述地在存储表面上扫描。可理解,当梭动器121在沿着y轴的一个方向上移动时,衬底210沿着y轴的对应移动在相对的方向上。类似地,当梭动器122在沿着x轴的一个方向上的移动在一个方向上时,衬底沿着x轴的对应移动在另一个方向上。
梭动器121、衬底210、杠杆241、支点232、以及连接支柱251和252共同形成了对沿着y轴方向的平移振动的平衡抵抗。具体而言,相对于衬底210的质量和支点232沿着杠杆241长度的位置选择梭动器121的质量,使得围绕支点232由梭动器121作用的旋转力矩与围绕支点232由衬底210作用的旋转力矩相平衡。
类似地,梭动器122、衬底210、轭220、杠杆242、支点231、以及连接支柱253和254共同形成了对沿着x轴方向的平移振动的平衡抵抗。具体而言,相对于支点231沿着杠杆242长度的位置以及轭220和衬底210的结合质量选择梭动器122的质量,使得围绕支点231由梭动器122作用的旋转力矩与围绕支点231由衬底210和轭220一起作用的旋转力矩相平衡。
可以理解,梭动器122可以比梭动器121的质量更大,以补偿衬底210和轭220的结合质量。或者,支点231相对于杠杆242的位置可以与支点232相对于杠杆241的位置不同,以实现旋转力矩的平衡,其中梭动器121的质量与梭动器122的质量类似。
梭动器121与衬底210之间旋转力矩的平衡降低了器件对于沿y轴方向平移振动的敏感性。沿y轴施加在衬底210上的振动由梭动器121经杠杆241平衡或反之。更加具体地,若沿y轴在任意方向向器件施加平移冲力,则梭动器121和衬底210都将沿相同的方向加速。然而,所得由梭动器121和衬底210作用在支点232上的转矩彼此相对,并且若梭动器121相对于支点232的旋转力矩基本等于衬底210相对于支点232的旋转力矩,则由此而消除。
类似地,梭动器122与载有衬底210的轭220之间旋转力矩的平衡降低了器件对于沿x轴方向平移振动的敏感性。沿x轴施加在轭220和/或衬底210上的振动由梭动器122平衡或反之。更加具体地,若沿x轴在任意方向向器件施加平移冲力,则梭动器122和衬底210及轭220都将沿相同的方向加速。然而,所得由梭动器122和衬底210与轭220的组合作用在支点231上的力矩彼此相对,并且若梭动器122相对于支点231的旋转力矩基本等于衬底210和轭220相对于支点231的旋转力矩,则由此而消除。
期望杠杆241和242的质量相对于梭动器121、梭动器122、轭220和衬底210的质量可以忽略。还期望杠杆241端点本身围绕支点232的旋转力矩彼此抵消,即使是在沿着x或y轴施加冲力的情况下。类似地,期望杠杆242端点本身围绕支点231的旋转力矩彼此抵消,即使是在沿着x或y轴施加冲力的情况下。在本发明的特别优选实施例中,杠杆241和242的形状选择为使得其质心为对应的支点231和232。这增强了对振动的抵抗。
支柱251至254允许杠杆241和242、梭动器121和122、轭220和将被振动的衬底210彼此接近,由此降低器件对于旋转运动和振动的敏感性。
进一步地说明,下面将参照图9介绍采用本发明技术的一般平衡系统。一般平衡系统包括可围绕固定于框架300上的支点360旋转的杠杆330和一对质量块M1和M2。M1经支柱350与杠杆330的一端连接。类似地,M2经支柱340与杠杆330的另一端连接。M2通过支柱340以距离支点360d2的距离与杠杆330连接。类似地,M1通过支柱350以距离支点360d1的距离与杠杆330连接。M1经一对平行弹性偏置部件310连接于框架300。类似地,M2经一对尺寸和性质与部件320类似的平行弹性偏置部件310与框架300连接。在垂直于支点340的旋转轴的平面内,每一对部件310和320对于背向相关弹性偏置的双方向运动是柔韧的,而对于该平面外的运动则是非柔韧的。因此,M1和M2不受沿着平行的轴y1和y2的双方向、背向由部件310和320作用的总弹性偏置的平移运动的影响,该轴y1和y2分别在垂直于支点的旋转轴的平面内。可以理解,为了使平衡系统地厚度最小化,M1、M2、杠杆330、部件310和320、以及支柱340和350共面。
若杠杆330、支柱340和支柱350的单独或总体的质量相对于质量块M1或M2中的一个都是可忽略的,则系统在M1围绕支点360的旋转力矩等于M2围绕支点360的旋转力矩时达到平衡,使得:
M1d1=M2d2 (1)
由此,沿着平行于轴y1或y2的两个方向中的任何一个施加在系统上的平移冲力沿相同的方向加速质量块M1和M2。然而,由质量块M1和M2作用在支点360上所得的转矩彼此相对。若转矩的大小相等,即在满足方程(1)的情况下,则其彼此消除,使得质量块M1和M2不存在相对于框架300的位移。然而,若经诸如压电换能器或例如上述电磁驱动单元的定位激励器仅向质量块M1和M2中的一个施加平移力,则所施加的力传给质量块M1和M2中的另一个,并且两个质量块沿相对的方向加速。因此,质量块M1和M2沿相对的方向都相对于框架300移动。
如前面参照图8所述,上面参照图9介绍的一般系统可用于在器件中提供对于振动的抵抗,该器件安装有用于沿包括在公共面中的正交方向的受控运动的元件。在上述参照图8介绍的本发明实施例中,提供了可沿着两个正交方向、在由框架130限定的平面内移动的衬底210及一对梭动器121和122,梭动器中每一个沿着该两个方向中的对应一个与衬底平衡。然而,本发明不限于这种设置。例如,参照图10,在本发明的另一实施例中,提供一种局部探测存储器件,其包括四个梭动器400至430,每个梭动器经四个杠杆440至470中对应的一个与衬底210连接。杠杆440至470中的每一个可围绕固定于框架130上的四个支点480至510中对应的一个旋转。虚影中示出的是轭220,衬底210经平行弹性偏置部件520和530与其连接,而框架130经平行弹性偏置部件540和550与其连接。如上所述,偏置部件520至550允许背向衬底210的偏置、在由框架限定的平面内、沿着正交的方向x和y的移动,但抑制梭动器向该平面外的移动。相对于与梭动器400至430中对应一个的连接,支点480至510中的每一个位于杠杆440至470中对应一个的中心处,且衬底210设置在中心处。因此,若衬底210的质量为M而梭动器430和410的质量为M/2,则器件平衡且由此抑制了沿着x轴施加的冲力。类似地,若梭动器400和420的质量也为M/2,则器件平衡且由此抑制了沿着y轴施加的冲力。另外,由于器件在质量分布上是对称的,因此器件对于旋转运动或振动的敏感性也达到最小化。
在上面参照图8、9和10介绍的本发明实施例中,为了最小化厚度,质量块是共面的。然而,本发明也可用于其中质量块位于平行平面内的系统。这有利地使得质量块彼此重叠,由此进一步降低了这种系统对于旋转振动的敏感性,并且还降低了表面积。例如,结合参照图11、12和13,采用本发明技术的这类系统的示例包括一对彼此重叠的质量块600和610。质量块610经一对平行弹性部件650与框架640连接。类似地,质量块600经第二对弹性部件660与框架连接。弹性部件对650和660的操作基本与上面参照图8、9和10介绍的相同。质量块610经支柱680连接于可围绕固定于框架640的支点630旋转的杠杆620的一端。类似地,质量块600经支柱670连接于杠杆620的另一端。在操作中,沿着平行于y轴的方向施加于系统的平移冲力沿着相同的方向加速质量块600和610。然而,由质量块600和610作用在支点630上所得的转矩彼此相对。若转矩的幅度相同,即对于满足方程(1)的情况,则其彼此抵消,使得质量块600和610相对于框架640无位移。然而,若仅向质量块600和610中的一个施加平移力,则所施加的力就经杠杆620传送至质量块600和610中的另一个,并且两个质量块600和610沿相对的方向加速。因此,两个质量块600和610沿着相对的方向都相对于框架640移动。
参照图14,在对上述参照图8介绍的本发明优选实施例的改动中,衬底210及梭动器121和122设置在彼此重叠的平行平面内。可理解,这种布置的操作沿着x和y轴基本与上面参照图11的介绍相同。另外,通过使衬底210与梭动器121和122m重叠,可以降低器件对于旋转运动或振动的敏感性。
上面参照图8、10和14介绍的本发明实施例中,可沿x轴移动的梭动器直接与衬底连接。然而,可以理解,在本发明的其它实施例中,可沿x轴移动的梭动器可经轭与衬底连接。在上面参照图8、10和14介绍的本发明实施例中,存储表面70位与衬底210上。然而,可以理解,在本发明的其它实施例中,阵列可位于衬底210上。还可理解,本发明可用于其中仅有一个传感器在存储表面上方扫描的存储器件中。类似地,可以理解本发明还可用于其中一个或更多个用于探测表面影像的探针在将要成像的表面上扫描的成像系统。
Claims (51)
1.一种用于降低制品对机械振动的敏感性的设备,该设备包括:框架;安装在框架中、用于沿着位移的第一轴、相对于框架双方向移动的第一和第二平面质量块;可围绕固定于框架的第一支点旋转的第一杠杆,该杠杆的一端与第一平面质量块连接而另一端与第二平面质量块连接,并且该支点设置在杠杆的端点之间,其中响应沿着位移轴施加于框架上的机械振动,通过第一平面质量块围绕支点作用的转矩由通过第二平面质量块围绕支点作用的转矩抵消,使得所用由第一平面质量块承载的制品具有对于振动的、降低的敏感性,并且其中第二平面质量块包括响应输入的激励使第二平面质量块沿着位移轴相对于框架移动从而产生第一平面质量块沿着位移轴相对于框架的对应移动的激励元件。
2.如权利要求1所述的设备,其中第一和第二平面质量块共面。
3.如权利要求1所述的设备,其中第一平面质量块设置在平行于第二平面质量块且与其分开的平面内。
4.如权利要求3所述的设备,其中第一和第二平面质量块至少部分地彼此重叠。
5.如权利要求1所述的设备,其中激励元件包括永久磁体装置,其具有平行于位移轴的磁化轴,并且与安装于框架上的导电线圈配合操作,用于响应作为线圈中电流的输入激励产生与永久磁体装置的磁化轴共轴的磁场。
6.如权利要求5所述的设备,其中永久磁体装置包括一对设置为相同的磁极彼此相对的永久磁体,而线圈设置在所述永久磁体之间。
7.如权利要求1所述的设备,还包括:第三平面质量块,第三平面质量块和第一平面质量块安装在框架内,用于沿着在由框架限定的平面中并与位移的第一轴正交的位移的第二轴、相对于框架的双方向移动;以及,可围绕固定于框架的第二支点旋转的第二杠杆,第二杠杆的一端与第一平面质量块连接而另一端与第三平面质量块连接,并且第二支点设置在第二杠杆的端点之间,其中响应沿着位移的第二轴施加于框架上的机械振动,通过第一平面质量块围绕第二支点作用的转矩由通过第三平面质量块围绕第二支点作用的转矩抵消。
8.如权利要求7所述的设备,其中第一、第二和第三平面质量块共面。
9.如权利要求7所述的设备,其中第一、第二和第三平面质量块的每一个都设置在彼此隔开的独立平行平面中。
10.如权利要求9所述的设备,其中第一、第二和第三平面质量块至少部分地彼此重叠。
11.如权利要求7至10中的任意一项所述的设备,其中第二平面质量块包括响应输入的激励使第二平面质量块沿着位移的第一轴相对于框架移动从而产生第一平面质量块沿位移的第一轴相对于框架的对应移动的第一激励元件,而第三平面质量块包括响应输入的激励使第三平面质量块沿着位移的第二轴相对于框架移动从而产生第一平面质量块沿位移的第二轴相对于框架的对应移动的第二激励元件。
12.如权利要求11所述的设备,其中第一激励元件包括第一永久磁体装置,其具有平行于位移的第一轴的磁化轴,并且与安装于框架上的第一导电线圈配合操作,用于响应作为第一线圈中电流的输入激励产生与第一永久磁体装置的磁化轴共轴的磁场,而第二激励元件包括第二永久磁体装置,其具有平行于位移的第二轴的磁化轴,并且与安装于框架上的第二导电线圈配合操作,用于响应作为第二线圈中电流的输入激励产生与第二永久磁体装置的磁化轴共轴的磁场。
13.如权利要求12所述的设备,其中第一永久磁体装置包括一对设置为相同磁极彼此相对的第一永久磁体,且第一线圈设置在第一永久磁体之间,而第二永久磁体装置包括一对设置为相同磁极彼此相对的第二永久磁体,且第二线圈设置在第二永久磁体之间。
14.如权利要求7所述的设备,还包括:第四平面质量块,安装于框架中,用于沿着位移的第一轴相对于框架的双方向运动;可围绕固定于框架的第三支点旋转的第三杠杆;第五平面质量块,安装于框架中,用于沿着位移的第二轴相对于框架的双方向运动;以及,可围绕固定于框架的第四支点旋转的第四杠杆,第三杠杆的一端与第一平面质量块连接而另一端与第四平面质量块连接,并且第三支点设置在第三杠杆的端点之间,第四杠杆的一端与第一平面质量块连接而另一端与第五平面质量块连接,并且第四支点设置在第四杠杆的端点之间,其中响应沿着位移的第一轴施加于框架上的机械振动,通过第一平面质量块围绕第三支点作用的转矩由通过第四平面质量块围绕第三支点作用的转矩抵消,而响应沿着位移的第二轴施加于框架上的机械振动,通过第一平面质量块围绕第四支点作用的转矩由通过第五平面质量块围绕第四支点作用的转矩抵消。
15.如权利要求14所述的设备,其中第一、第二、第三、第四和第五平面质量块共面,第四平面质量块安装在框架中第一平面质量块的一侧,远离第二平面质量块,而第五平面质量块安装在框架中第一平面质量块的一侧,远离第三平面质量块。
16.如权利要求14所述的设备,其中第一、第二、第三、第四和第五平面质量块的每一个都设置在彼此隔开的独立平行平面中。
17.如权利要求16所述的设备,其中第一、第二、第三、第四和第五平面质量块至少部分地彼此重叠。
18.如权利要求14至17中的任意一项所述的设备,其中第二平面质量块包括响应输入的激励使第二平面质量块沿着位移的第一轴相对于框架移动从而产生第一平面质量块沿位移的第一轴相对于框架的对应移动的第一激励元件,而第三平面质量块包括响应输入的激励使第三平面质量块沿着位移的第二轴相对于框架移动从而产生第一平面质量块沿位移的第二轴相对于框架的对应移动的第二激励元件。
19.如权利要求18所述的设备,其中第一激励元件包括第一永久磁体装置,其具有平行于位移的第一轴的磁化轴,并且与安装于框架上的第一导电线圈配合操作,用于响应作为第一线圈中电流的输入激励产生与第一永久磁体装置的磁化轴共轴的磁场,而第二激励元件包括第二永久磁体装置,其具有平行于位移的第二轴的磁化轴,并且与安装于框架上的第二导电线圈配合操作,用于响应作为第二线圈中电流的输入激励产生与第二永久磁体装置的磁化轴共轴的磁场。
20.如权利要求19所述的设备,其中第一永久磁体装置包括一对设置为相同磁极彼此相对的第一永久磁体,且第一线圈设置在第一永久磁体之间,而第二永久磁体装置包括一对设置为相同磁极彼此相对的第二永久磁体,且第二线圈设置在第二永久磁体之间。
21.如权利要求20所述的设备,其中第四平面质量块包括响应输入的激励使第四平面质量块沿着位移的第一轴相对于框架移动从而产生第一平面质量块沿位移的第一轴相对于框架的对应移动的第三激励元件,而第五平面质量块包括响应输入的激励使第五平面质量块沿着位移的第二轴相对于框架移动从而产生第一平面质量块沿位移的第二轴相对于框架的对应移动的第四激励元件。
22.如权利要求21所述的设备,其中第三激励元件包括第三永久磁体装置,其具有平行于位移的第一轴的磁化轴,并且与安装于框架上的第三导电线圈配合操作,用于响应作为第三线圈中电流的输入激励产生与第三永久磁体装置的磁化轴共轴的磁场,而第四激励元件包括第四永久磁体装置,其具有平行于位移的第二轴的磁化轴,并且与安装于框架上的第四导电线圈配合操作,用于响应作为第四线圈中电流的输入激励产生与第四永久磁体装置的磁化轴共轴的磁场。
23.如权利要求22所述的设备,其中第三永久磁体装置包括一对设置为相同磁极彼此相对的第三永久磁体,且第三线圈设置在第三永久磁体之间,而第四永久磁体装置包括一对设置为相同磁极彼此相对的第四永久磁体,且第四线圈设置在第四永久磁体之间。
24.一种局部探测存储器件,包括:存储表面;至少一个用于从该表面读取和/或向该表面写入数据的探针;用于彼此相对地移动探针和表面的扫描器,从而使探针在表面上扫描;以及,用于降低制品对机械振动的敏感性的设备,该设备包括:框架;安装在框架中、用于沿着位移的第一轴、相对于框架双方向移动的第一和第二平面质量块;可围绕固定于框架的第一支点旋转的第一杠杆,该杠杆的一端与第一平面质量块连接而另一端与第二平面质量块连接,并且该支点设置在杠杆的端点之间,其中响应沿着位移轴施加于框架上的机械振动,通过第一平面质量块围绕支点作用的转矩由通过第二平面质量块围绕支点作用的转矩抵消,使得所用由第一平面质量块承载的制品具有对于振动的、降低的敏感性,所述设备与该至少一个探针和所述存储表面中的一个以及扫描器连接,用于降低该至少一个探针和所述存储表面中的一个对于机械振动的敏感性。
25.如权利要求24所述的器件,其中该至少一个探针由第一平面质量块承载。
26.如权利要求24所述的器件,其中存储表面由第一平面质量块承载。
27.一种探测成像系统,包括:至少一个探针,用于探测表面的影像;扫描器,用于使探针和表面彼此相对地移动,从而使该或每个探针在表面上扫描;以及用于降低制品对机械振动的敏感性的设备,该设备包括:框架;安装在框架中、用于沿着位移的第一轴、相对于框架双方向移动的第一和第二平面质量块;可围绕固定于框架的第一支点旋转的第一杠杆,该杠杆的一端与第一平面质量块连接而另一端与第二平面质量块连接,并且该支点设置在杠杆的端点之间,其中响应沿着位移轴施加于框架上的机械振动,通过第一平面质量块围绕支点作用的转矩由通过第二平面质量块围绕支点作用的转矩抵消,使得所用由第一平面质量块承载的制品具有对于振动的、降低的敏感性,并且其中第二平面质量块包括响应输入的激励使第二平面质量块沿着位移轴相对于框架移动从而产生第一平面质量块沿着位移轴相对于框架的对应移动的激励元件,该设备与该至少一个探针和所述表面中的一个以及扫描器连接,用于降低该至少一个探针和所述表面中的一个对于机械振动的敏感性。
28.如权利要求27所述的探测成像系统,其中第一和第二平面质量块共面。
29.如权利要求27所述的探测成像系统,其中第一平面质量块设置在平行于第二平面质量块且与其分开的平面内。
30.如权利要求29所述的探测成像系统,其中第一和第二平面质量块至少部分地彼此重叠。
31.如权利要求27所述的探测成像系统,其中激励元件包括永久磁体装置,其具有平行于位移轴的磁化轴,并且与安装于框架上的导电线圈配合操作,用于响应作为线圈中电流的输入激励产生与永久磁体装置的磁化轴共轴的磁场。
32.如权利要求31所述的探测成像系统,其中永久磁体装置包括一对设置为相同的磁极彼此相对的永久磁体,而线圈设置在所述永久磁体之间。
33.如权利要求27所述的探测成像系统,还包括:第三平面质量块,第三平面质量块和第一平面质量块安装在框架内,用于沿着在由框架限定的平面中并与位移的第一轴正交的位移的第二轴、相对于框架的双方向移动;以及,可围绕固定于框架的第二支点旋转的第二杠杆,第二杠杆的一端与第一平面质量块连接而另一端与第三平面质量块连接,并且第二支点设置在第二杠杆的端点之间,其中响应沿着位移的第二轴施加于框架上的机械振动,通过第一平面质量块围绕第二支点作用的转矩由通过第三平面质量块围绕第二支点作用的转矩抵消。
34.如权利要求33所述的探测成像系统,其中第一、第二和第三平面质量块共面。
35.如权利要求33所述的探测成像系统,其中第一、第二和第三平面质量块的每一个都设置在彼此隔开的独立平行平面中。
36.如权利要求35所述的探测成像系统,其中第一、第二和第三平面质量块至少部分地彼此重叠。
37.如权利要求35至36中的任意一项所述的探测成像系统,其中第二平面质量块包括响应输入的激励使第二平面质量块沿着位移的第一轴相对于框架移动从而产生第一平面质量块沿位移的第一轴相对于框架的对应移动的第一激励元件,而第三平面质量块包括响应输入的激励使第三平面质量块沿着位移的第二轴相对于框架移动从而产生第一平面质量块沿位移的第二轴相对于框架的对应移动的第二激励元件。
38.如权利要求37所述的探测成像系统,其中第一激励元件包括第一永久磁体装置,其具有平行于位移的第一轴的磁化轴,并且与安装于框架上的第一导电线圈配合操作,用于响应作为第一线圈中电流的输入激励产生与第一永久磁体装置的磁化轴共轴的磁场,而第二激励元件包括第二永久磁体装置,其具有平行于位移的第二轴的磁化轴,并且与安装于框架上的第二导电线圈配合操作,用于响应作为第二线圈中电流的输入激励产生与第二永久磁体装置的磁化轴共轴的磁场。
39.如权利要求38所述的探测成像系统,其中第一永久磁体装置包括一对设置为相同磁极彼此相对的第一永久磁体,且第一线圈设置在第一永久磁体之间,而第二永久磁体装置包括一对设置为相同磁极彼此相对的第二永久磁体,且第二线圈设置在第二永久磁体之间。
40.如权利要求33所述的探测成像系统,还包括:第四平面质量块,安装于框架中,用于沿着位移的第一轴相对于框架的双方向运动;可围绕固定于框架的第三支点旋转的第三杠杆;第五平面质量块,安装于框架中,用于沿着位移的第二轴相对于框架的双方向运动;以及,可围绕固定于框架的第四支点旋转的第四杠杆,第三杠杆的一端与第一平面质量块连接而另一端与第四平面质量块连接,并且第三支点设置在第三杠杆的端点之间,第四杠杆的一端与第一平面质量块连接而另一端与第五平面质量块连接,并且第四支点设置在第四杠杆的端点之间,其中响应沿着位移的第一轴施加于框架上的机械振动,通过第一平面质量块围绕第三支点作用的转矩由通过第四平面质量块围绕第三支点作用的转矩抵消,而响应沿着位移的第二轴施加于框架上的机械振动,通过第一平面质量块围绕第四支点作用的转矩由通过第五平面质量块围绕第四支点作用的转矩抵消。
41.如权利要求40所述的探测成像系统,其中第一、第二、第三、第四和第五平面质量块共面,第四平面质量块安装在框架中第一平面质量块的一侧,远离第二平面质量块,而第五平面质量块安装在框架中第一平面质量块的一侧,远离第三平面质量块。
42.如权利要求40所述的探测成像系统,其中第一、第二、第三、第四和第五平面质量块的每一个都设置在彼此隔开的独立平行平面中。
43.如权利要求42所述的探测成像系统,其中第一、第二、第三、第四和第五平面质量块至少部分地彼此重叠。
44.如权利要求40至43中的任意一项所述的探测成像系统,其中第二平面质量块包括响应输入的激励使第二平面质量块沿着位移的第一轴相对于框架移动从而产生第一平面质量块沿位移的第一轴相对于框架的对应移动的第一激励元件,而第三平面质量块包括响应输入的激励使第三平面质量块沿着位移的第二轴相对于框架移动从而产生第一平面质量块沿位移的第二轴相对于框架的对应移动的第二激励元件。
45.如权利要求44所述的探测成像系统,其中第一激励元件包括第一永久磁体装置,其具有平行于位移的第一轴的磁化轴,并且与安装于框架上的第一导电线圈配合操作,用于响应作为第一线圈中电流的输入激励产生与第一永久磁体装置的磁化轴共轴的磁场,而第二激励元件包括第二永久磁体装置,其具有平行于位移的第二轴的磁化轴,并且与安装于框架上的第二导电线圈配合操作,用于响应作为第二线圈中电流的输入激励产生与第二永久磁体装置的磁化轴共轴的磁场。
46.如权利要求45所述的探测成像系统,其中第一永久磁体装置包括一对设置为相同磁极彼此相对的第一永久磁体,且第一线圈设置在第一永久磁体之间,而第二永久磁体装置包括一对设置为相同磁极彼此相对的第二永久磁体,且第二线圈设置在第二永久磁体之间。
47.如权利要求46所述的探测成像系统,其中第四平面质量块包括响应输入的激励使第四平面质量块沿着位移的第一轴相对于框架移动从而产生第一平面质量块沿位移的第一轴相对于框架的对应移动的第三激励元件,而第五平面质量块包括响应输入的激励使第五平面质量块沿着位移的第二轴相对于框架移动从而产生第一平面质量块沿位移的第二轴相对于框架的对应移动的第四激励元件。
48.如权利要求47所述的探测成像系统,其中第三激励元件包括第三永久磁体装置,其具有平行于位移的第一轴的磁化轴,并且与安装于框架上的第三导电线圈配合操作,用于响应作为第三线圈中电流的输入激励产生与第三永久磁体装置的磁化轴共轴的磁场,而第四激励元件包括第四永久磁体装置,其具有平行于位移的第二轴的磁化轴,并且与安装于框架上的第四导电线圈配合操作,用于响应作为第四线圈中电流的输入激励产生与第四永久磁体装置的磁化轴共轴的磁场。
49.如权利要求48所述的探测成像系统,其中第三永久磁体装置包括一对设置为相同磁极彼此相对的第三永久磁体,且第三线圈设置在第三永久磁体之间,而第四永久磁体装置包括一对设置为相同磁极彼此相对的第四永久磁体,且第四线圈设置在第四永久磁体之间。
50.如权利要求27所述的系统,其中该至少一个探针由第一平面质量块承载。
51.如权利要求27所述的系统,其中将成像的表面由第一平面质量块承载。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP01121161 | 2001-09-04 | ||
| EP01121161.2 | 2001-09-04 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1551956A CN1551956A (zh) | 2004-12-01 |
| CN100562674C true CN100562674C (zh) | 2009-11-25 |
Family
ID=8178536
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB028173473A Expired - Fee Related CN100562674C (zh) | 2001-09-04 | 2002-07-19 | 用于降低制品对机械振动的敏感性的设备 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7328446B2 (zh) |
| EP (1) | EP1468205B1 (zh) |
| JP (1) | JP4370165B2 (zh) |
| KR (1) | KR100570139B1 (zh) |
| CN (1) | CN100562674C (zh) |
| DE (1) | DE60210821T2 (zh) |
| WO (1) | WO2003021127A2 (zh) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7119511B2 (en) | 2003-04-11 | 2006-10-10 | International Business Machines Corporation | Servo system for a two-dimensional micro-electromechanical system (MEMS)-based scanner and method therefor |
| US20060291271A1 (en) * | 2005-06-24 | 2006-12-28 | Nanochip, Inc. | High density data storage devices having servo indicia formed in a patterned media |
| US20070008867A1 (en) * | 2005-07-08 | 2007-01-11 | Nanochip, Inc. | High density data storage devices with a lubricant layer comprised of a field of polymer chains |
| US20080174918A1 (en) * | 2007-01-19 | 2008-07-24 | Nanochip, Inc. | Method and system for writing and reading a charge-trap media with a probe tip |
| US20080233672A1 (en) * | 2007-03-20 | 2008-09-25 | Nanochip, Inc. | Method of integrating mems structures and cmos structures using oxide fusion bonding |
| US20090129246A1 (en) * | 2007-11-21 | 2009-05-21 | Nanochip, Inc. | Environmental management of a probe storage device |
| US7864653B2 (en) * | 2007-12-13 | 2011-01-04 | International Business Machines Corporation | Probe storage device |
| US8000214B2 (en) * | 2007-12-13 | 2011-08-16 | International Business Machines Corporation | Hermetic seal for a scanner assembly of a probe storage device |
| US7792010B2 (en) * | 2007-12-13 | 2010-09-07 | International Business Machines Corporation | Scanning system for a probe storage device |
| US7913376B2 (en) * | 2007-12-13 | 2011-03-29 | International Business Machines Corporation | Method of forming an actuating mechanism for a probe storage system |
| US20090155727A1 (en) * | 2007-12-13 | 2009-06-18 | International Business Machines Corporation | Method of forming a flat media table for probe storage device |
| US7876663B2 (en) * | 2007-12-13 | 2011-01-25 | International Business Machines Corporation | Scanning system for a probe storage device |
| US7965615B2 (en) * | 2007-12-13 | 2011-06-21 | International Business Machines Corporation | Probe storage device scanner chip having a multi-layer media support table |
| US7440155B1 (en) | 2007-12-13 | 2008-10-21 | International Business Machines Corporation | Mass-balanced actuating mechanism for a micro scanning device |
| US20100039729A1 (en) * | 2008-08-14 | 2010-02-18 | Nanochip, Inc. | Package with integrated magnets for electromagnetically-actuated probe-storage device |
| DE102012004808A1 (de) | 2012-03-09 | 2013-09-12 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Vorrichtung zur Beeinflussung der Schwingungsübertragung zwischen zwei Einheiten |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB381174A (en) * | 1929-07-30 | 1932-09-23 | Georg Heinrich Schieferstein | Device for balancing the action of forces and inertia |
| US3552694A (en) * | 1969-03-18 | 1971-01-05 | Kaman Corp | Three-dimensional vibration isolator |
| US4085825A (en) * | 1975-04-03 | 1978-04-25 | Rockwell International Corporation | Vibratory system isolation and flexure pivot |
| US4088042A (en) * | 1976-09-07 | 1978-05-09 | The Boeing Company | Vibration isolation system |
| US4309107A (en) * | 1980-01-11 | 1982-01-05 | Litton Systems, Inc. | Laser gyro dither mechanism |
| US4403681A (en) * | 1980-09-30 | 1983-09-13 | The Boeing Company | Three directional vibration isolator |
| JP2925771B2 (ja) * | 1991-03-08 | 1999-07-28 | キヤノン株式会社 | 情報記録担体及びこれを使用する情報処理装置 |
| FR2674591B1 (fr) * | 1991-03-25 | 1993-06-18 | Aerospatiale | Dispositif de transmission d'efforts statiques et de filtrage d'excitations vibratoires entre deux pieces. |
| FR2677096B1 (fr) * | 1991-05-31 | 1995-02-17 | Hutchinson Sa | Dispositif d'attenuation des vibrations periodiques d'une structure mecanique. |
| JP3013858B2 (ja) * | 1994-08-27 | 2000-02-28 | インターナシヨナル・ビジネス・マシーンズ・コーポレーション | 原子的分解能を持った微細位置決め装置 |
| JPH08180623A (ja) | 1994-12-22 | 1996-07-12 | Hitachi Ltd | 磁気ディスク装置 |
| US5835477A (en) * | 1996-07-10 | 1998-11-10 | International Business Machines Corporation | Mass-storage applications of local probe arrays |
-
2002
- 2002-07-19 US US10/488,658 patent/US7328446B2/en not_active Expired - Fee Related
- 2002-07-19 EP EP02745747A patent/EP1468205B1/en not_active Expired - Fee Related
- 2002-07-19 JP JP2003525166A patent/JP4370165B2/ja not_active Expired - Fee Related
- 2002-07-19 DE DE60210821T patent/DE60210821T2/de not_active Expired - Lifetime
- 2002-07-19 WO PCT/IB2002/002865 patent/WO2003021127A2/en active IP Right Grant
- 2002-07-19 CN CNB028173473A patent/CN100562674C/zh not_active Expired - Fee Related
- 2002-07-19 KR KR1020047002699A patent/KR100570139B1/ko not_active IP Right Cessation
Non-Patent Citations (2)
| Title |
|---|
| Linear translation mechanisms for nanotechnologyapplications. D G Chetwynd.Measurement + Control,Vol.24 . 1991 |
| Linear translation mechanisms for nanotechnologyapplications. D G Chetwynd.Measurement + Control,Vol.24 . 1991 * |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4370165B2 (ja) | 2009-11-25 |
| JP2005502006A (ja) | 2005-01-20 |
| WO2003021127A2 (en) | 2003-03-13 |
| KR100570139B1 (ko) | 2006-04-12 |
| EP1468205B1 (en) | 2006-04-19 |
| WO2003021127A8 (en) | 2003-06-05 |
| DE60210821T2 (de) | 2006-10-12 |
| US20040245462A1 (en) | 2004-12-09 |
| KR20040036732A (ko) | 2004-04-30 |
| EP1468205A2 (en) | 2004-10-20 |
| WO2003021127A3 (en) | 2004-07-29 |
| DE60210821D1 (de) | 2006-05-24 |
| US7328446B2 (en) | 2008-02-05 |
| CN1551956A (zh) | 2004-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100562674C (zh) | 用于降低制品对机械振动的敏感性的设备 | |
| US6459088B1 (en) | Drive stage and scanning probe microscope and information recording/reproducing apparatus using the same | |
| US5170089A (en) | Two-axis motion apparatus utilizing piezoelectric material | |
| US5834864A (en) | Magnetic micro-mover | |
| US5051594A (en) | Fine positioning device, as for the stage of a scanning tunneling microscope | |
| Maroufi et al. | MEMS for nanopositioning: Design and applications | |
| CN101149475A (zh) | 执行器件、光扫描仪以及图像形成装置 | |
| US7924692B2 (en) | Actuator assembly providing two-dimensional movement of a moveable element in a data storage device | |
| Kim et al. | Blocked force measurement of electro-active paper actuator by micro-balance | |
| CN1982201A (zh) | 微型光学反射组件 | |
| KR100773545B1 (ko) | 로킹장치를 구비한 x-y스테이지 구동장치와, 이를 채용한정보저장기기 | |
| US8330329B2 (en) | Scanning probe driver | |
| JPH0646207A (ja) | 圧電駆動マイクロスキャナ | |
| Debray et al. | Application of a multilayered magnetostrictive film to a micromachined 2-D optical scanner | |
| US7996860B2 (en) | Apparatus for reducing sensitivity of an article to mechanical shock | |
| JP2007179608A (ja) | 情報処理装置 | |
| JP2007078819A (ja) | 光スキャナ素子 | |
| Long et al. | Design of Piezoelectric Inertial Actuator with Wedge‐shaped Foot Structure for Cell Manipulation | |
| US8018819B2 (en) | Microelectromechanical device having an electromagnetic micromotor, in particular mass storage device made by probe storage technology | |
| Koay et al. | Reviews: Torsional spring mechanism resonant scanner’s technology | |
| JP2004239987A (ja) | 光走査装置および画像形成装置 | |
| Xia et al. | Nanoscale Actuation and Active AFM Probe Design Examples | |
| KR20080017766A (ko) | 마이크로 스캐너 | |
| JP2976703B2 (ja) | ヘッドアクチュエータ | |
| JP3825591B2 (ja) | 微小領域走査装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20091125 Termination date: 20200719 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |