CN100416328C - 透镜筒和包括透镜筒的图像采集装置 - Google Patents
透镜筒和包括透镜筒的图像采集装置 Download PDFInfo
- Publication number
- CN100416328C CN100416328C CNB2004100858860A CN200410085886A CN100416328C CN 100416328 C CN100416328 C CN 100416328C CN B2004100858860 A CNB2004100858860 A CN B2004100858860A CN 200410085886 A CN200410085886 A CN 200410085886A CN 100416328 C CN100416328 C CN 100416328C
- Authority
- CN
- China
- Prior art keywords
- rotor
- lens
- cylindrical
- cylinder shape
- magnet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000003287 optical effect Effects 0.000 claims abstract description 216
- 230000005291 magnetic effect Effects 0.000 claims abstract description 55
- 230000005294 ferromagnetic effect Effects 0.000 claims description 30
- 239000003302 ferromagnetic material Substances 0.000 claims description 23
- 230000008859 change Effects 0.000 claims description 10
- 230000004907 flux Effects 0.000 claims description 9
- 238000006243 chemical reaction Methods 0.000 claims description 5
- 230000007246 mechanism Effects 0.000 abstract description 7
- 241001014698 Phacoides Species 0.000 description 47
- 230000001105 regulatory effect Effects 0.000 description 24
- 229910000831 Steel Inorganic materials 0.000 description 9
- 239000010959 steel Substances 0.000 description 9
- 230000008093 supporting effect Effects 0.000 description 6
- 238000012546 transfer Methods 0.000 description 6
- 230000010363 phase shift Effects 0.000 description 5
- 238000004804 winding Methods 0.000 description 5
- 230000015572 biosynthetic process Effects 0.000 description 4
- 241001397306 Proales Species 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 238000001444 catalytic combustion detection Methods 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 229910001220 stainless steel Inorganic materials 0.000 description 2
- 239000010935 stainless steel Substances 0.000 description 2
- 238000005452 bending Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000003801 milling Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/08—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted to co-operate with a remote control mechanism
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Lens Barrels (AREA)
Abstract
一种夹持透镜组的透镜筒包括:用于在平行于光学轴线方向移动地夹持透镜组的夹持机构;包括以平行于光学轴线方向作为中心轴线的圆柱形定子和与定子同轴并且相对定子围绕中心轴线旋转的转子的电磁马达;用于转换转子的旋转运动成为直线向前运动的转换机构,以便使夹持机构在平行于光学直线方向移动透镜组;在平行于光学轴线方向对转子施加磁性力的施力机构。
Description
技术领域
所披露的概念涉及用于夹持光学元件,诸如透镜元件和光学滤器的透镜筒和包括这样透镜筒的图像采集装置。更具体地说,所披露的概念涉及具有综合在其中包括圆柱形转子电磁马达的透镜筒和包括这样透镜筒的图像采集装置。
发明背景
由于整合程度的改进和图像采集传感器及信号处理电路(诸如电荷偶合装置(CCDs)及互补金属氧化物半导体(CMOS))成本的降低,数字照相机和数字摄影机已经迅速地流行。
还有,近年来,蜂窝电话、个人数字助理(PDA)和其它具有综合在其内的数字照相镜头的终端设备变得相当普遍。将来,可以预言数字镜头将进一步在监控照相和车辆装载镜头领域中流行。这样数字照相机包括图像采集装置。一般,图像采集装置包括光学系统、镜筒和图像采集传感器。
近年来多数数字照相机以马达驱动方式执行缩放和聚焦。这样马达驱动缩放和聚焦利用马达驱动夹持包括在光学系统中预定透镜元件,以便移动透镜元件到平行于光学轴线的方向。
不过,当夹持机构被通用无刷马达驱动时,需要在镜筒中留出空间放置马达,从而增加透镜筒的尺寸。此外,需要为传递马达转动诸如齿轮的传动机构,从而增加透镜筒尺寸并产生噪声。
为处理这一问题,曾建议一种技术,其中夹持机构利用一种电磁马达驱动,该马达包括一个以透镜光学轴线作为中心轴线的圆柱形定子,和一个与定子同轴的圆柱形转子(日本专利公开出版物No.2000-131586和日本专利No.3232517)。
随着采用这样包括圆柱形转子的电磁马达,就不需要放置马达的空间。还有,包括用于传递马达转动的齿轮的传动机构可以简化。因此,透镜筒在垂直于光学轴线方向的尺寸可以缩小。还有,驱动产生的噪音可以减少。
不过一般地说,在这样包括圆柱转子的电磁马达中,转子的转动必须在离开其旋转中心的位置上支承。因此,相对于定子转子在位置上是不稳定的,并且转子的位置精度较低。
为处理这一问题,在日本专利公开出版物No.2000-131586披露的电磁马达中,为支承转子旋转的轴承长度在平行于光学轴线方向增加,从而使转子在位置上稳定。因此,在日本专利公开出版物No.2000-131586中披露的透镜筒中,在平行于光学方向很难使透镜筒的尺寸紧凑。
另一方面,在日本专利No.3232527中披露的电磁马达中,支承转子旋转的轴承长度设置在转子和定子之间,从而使转子位置稳定。因此,在日本专利No.3232527中披露的透镜筒中,很难使透镜筒在垂直于光学轴线方向紧凑。
同样地,在包括圆柱形转子的电磁马达的传统透镜筒中,很难使透镜筒在平行于或垂直于光学轴线方向的尺寸紧凑。
发明内容
所披露的概念包括一个含有可以高精度地定位的电磁马达的紧凑透镜筒,和一个含有上述透镜筒的紧凑的图像采集装置。
透镜筒包括:
支持第一透镜组的第一透镜框架;
第一电磁马达,包括其轴线平行于作为中心线的光学轴线的第一圆柱形定子,和与第一圆柱形定子同轴并且围绕第一圆柱形定子中心旋转的第一圆柱形转子;
第一凸轮筒或旋转筒,可操作地连接于第一透镜框架用于转换第一圆柱转子的旋转运动成为直线运动以便在平行于光学轴线方向移动第一透镜框架和第一透镜组;和
第一铁磁材料,它相对于第一圆柱形转子的一端定位,用于对第一圆柱形转子在平行于光学轴线方向施加磁力。
依照以上结构,即使平行于电磁马达转子光学轴线方向的轴承长度较短,在有力施加时转子可以经常保持在稳定位置。如此,可以获得转子高精度定位。
还有,紧凑的透镜可以通过夹持共享一条光学轴线并设置在平行于光学轴线方向的第一透镜组和第二透镜组的透镜筒获得。以上描述的该透镜还包括:
用于支承第二透镜组的第二透镜框架;
第二电磁马达,包括其轴线平行于作为中心线的光学轴线的第二圆柱形定子,和与第二圆柱形定子同轴并且围绕第二圆柱形定子中心旋转的第二圆柱形转子;和
第二凸轮筒或旋转筒,用于转换第二圆柱形转子的旋转运动成为直线运动以便在平行于光学轴线方向移动第二透镜框架和第二透镜组,其中
第二铁磁材料,它相对于第二圆柱形转子的一端定位,用于对第二圆柱形转子在平行于光学轴线的方向施加磁性力。
依照以上结构,即使平行于电磁马达转子光学轴线方向的轴承长度较短,在有力施加时转子可以经常保持在稳定位置。如此,可以获得转子高精度定位。
还有另一方面,输出代表物体光学图像信号的电气图像信号的图像采集装置能够利用以上描述的透镜筒。图像采集装置还将包括含有用于形成物体光学图像的第一透镜组的图像采集光学系统和用于接受由图像采集系统形成的光学图像并且转换光学图像成为电气图像信号的图像采集传感器。
如以上所描述,可以获得一个含有能够高精度定位电磁马达的紧凑透镜筒。
这些和其它特征、方面和优点从下列详细描述连同附图可以变得十分明显。
附图说明
图1为按照第一实施例图像采集装置的纵向剖面图;
图2为按照第一实施例图像采集装置管座立体图;
图3为按照第一实施例图像采集装置的透镜筒立体图;
图4为显示按照第一实施例图像采集装置透镜筒和管座连接状态立体图;
图5为按照第一实施例图像采集装置缩放凸轮筒和聚焦凸轮筒立体图;
图6为按照第一实施例图像采集装置透镜框架、管座和凸论筒连接状态立体图;
图7为示意地显示按照第一实施例图像采集装置缩放马达结构立体图;
图8为按照第二实施例图像采集装置包含在透镜筒内的透镜体立体图;
图9为显示按照第二实施例图像采集装置中透镜体和包含在透镜筒内转子之间关系的剖面图;
图10为按照第三实施例图像采集装置包含在透镜筒内转子的剖面图;
图11为显示按照第四实施例图像采集装置透镜筒基本零件的立体图;
图12为按照第五实施例图像采集装置的纵向剖面图;
图13为显示按照第五实施例图像采集装置中零件立体图;
图14为按照第五实施例图像采集装置中缩放马达分解立体图;
图15为描述按照第五实施例图像采集装置的透镜筒中第一透镜框架、引导轴和三个支承轴之间位置关系的立体图;以及
图16为描述按照第五实施例图像采集装置的透镜筒中第一透镜框架、引导轴和三个支承轴之间位置关系的正视图。
具体的实施方式
第一实施例
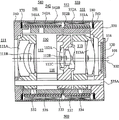
图1为按照第一实施例图像采集装置的纵向剖面图。在图1中,图像采集装置100包括光学系统110、图像传感器120和透镜筒130。
光学系统110包括,依次从物体一侧(在图左方)到图像一侧(在图右方)沿光学轴线101的第一缩放透镜组111、第二缩放透镜组112、聚焦透镜组113、和低通滤器114。光学系统110在图像采集传感器120上形成物体的光学图像。
第一缩放透镜组111和第二缩放透镜组112沿光学轴线移动使在其间的空间变化,从而缩小或放大物体光学图像,即变化图像的比例。
第一缩放透镜组111包括透镜元件111A和透镜元件111B。第二缩放透镜组112包括透镜元件112A、透镜元件112B和透镜元件112C。
聚焦透镜组113沿其光学轴线移动执行聚焦以便调节物体光学图像的清晰状态。聚焦透镜组113包括一个透镜元件113A。
低通滤器114具有从物体光学图像切割预定空间频率的光学特性。根据该光学特性,低通滤器114减少物体光学图像的伪色彩和波纹。
图像采集传感器120典型地为一种CCD。图像采集传感器120转换由光学系统110形成的光学图像成为用于输出的电气图像信号。图像采集传感器120可以是CMOS。
透镜筒130根据管座131配置。在管座131内,透镜筒130包括第一透镜框架132,第二透镜框架133,第三透镜框架134和引导轴135。在管座131外,透镜筒130包括缩放凸轮筒136、聚焦凸轮筒137、缩放马达140和聚焦马达150。透镜筒130还包括前盖160,电磁板170和电磁板180。
图2显示按照第一实施例图像采集装置管座131的立体图。在图2中,管座131包括固定筒131A和凸缘部分131B。
固定筒131A具有以光学轴线101作为中心轴并向平行于光学轴线延伸的圆柱形。固定筒131A在其表面上具有对应于预定中心角的缺口部分131C。缺口部分131C的中心角在离开凸缘部分131B预定位置上变化使其形成缺口的大开口面积。固定筒131A在其内表面上设置引导部分131D。引导部分131D包括突出部分131E和形成在突出部分131E右侧和左侧的凹槽部分131F。
凸缘部分131B具有垂直于光学轴线101的碟形。在凸缘部分131B的中心,形成矩形开口131G。在开口131G中,安装图像采集传感器120和低通滤器114。还有,凸缘部分131D具有用于夹持引导轴16的小孔131H。
在图1中,第一透镜框架132夹持第一透镜缩放组111。第二透镜框架133夹持第二缩放透镜组112。第三透镜框架134夹持聚焦透镜组113
第一透镜框架132在其边缘设置在平行于光学轴线101方向穿通的通孔132C。第二透镜框架133在其边缘设置在平行于光学轴线101方向穿通的通孔133C。第三透镜框架134在其边缘设置在平行于光学轴线101方向穿通的通孔134C。引导轴135如此放置使其穿过通孔132C、133C和134C。
图3为按照第一实施例图像采集装置透镜框架的立体图。在图3中,第一透镜框架132在横越光学轴线101的通孔132C对面位置上在其外表面上设置旋转调节部分132B。第二透镜框架133在横越光学轴线101的通孔133C对面位置在其外表面上设置旋转调节部分133B。第三透镜框架134在横越光学轴线101的通孔134C对面位置上在其外表面上设置旋转调节部分134B。
旋转调节部分132B包括在平行于光学轴线101方向延伸的凹槽部分132D和一对形成在凹槽部分132D的左侧和右侧的突出部分132E。旋转调节部分133B包括在平行于光学轴线101方向延伸的凹槽部分133D和一对形成在凹槽部分133D的左侧和右侧的突出部分133E。旋转调节部分134B包括在平行于光学轴线101方向延伸的凹槽部分134D和一对形成在凹槽部分134D的左侧和右侧的突出部分134E。
凹槽部分132D连接到管座131引导部分131D的突出部分131B。突出部分132E连接到管座131引导部分131D的凹槽部分131F。
凹槽部分133D连接到管座131引导部分131D的突出部分131E。突出部分133E配合在管座131引导部分131D的凹槽部分131F中。
凹槽部分134D连接到管座131引导部分131D的突出部分131E上。突出部分134E配合在管座131引导部分131D的凹槽部分131F中。
随着各透镜框架的旋转调节部分连接到管座131引导部分131D,各透镜框架调节成为不能自由地围绕在垂直于光学轴线101平面上的引导轴旋转。
图4为显示按照第一实施例图像采集装置中透镜框架和管座连接状态的立体图。在图3和4中,第一透镜框架132在预定位置设置销子132A使其不致干涉通孔132C和设置在外表面上的旋转调节部分132B。第二透镜框架133在预定位置设置销子133A使其不致干涉通孔133C和设置在外表面上的旋转调节部分133B。第三透镜框架134在预定位置设置销子134A使其不致干涉通孔134C和设置在外表面上的旋转调节部分134B。
引导轴135、透镜框架的通孔和透镜框架的销子位于对应于管座131缺口部分131C的区域使其暴露在外。
在图1中,管座131的固定筒131A在其外表面上设置以光学轴线101作为中心轴的缩放凸轮筒136和聚焦凸轮筒137。图5为按照第一实施例图像采集装置的缩放凸轮筒和聚焦凸轮筒的立体图。
缩放凸轮筒136包括个具有预定形状的凸轮凹槽136A和凸轮凹槽136B。凸轮凹槽136A和136B二者均穿透缩放凸轮筒136的外表面。凸轮凹槽136A沿平行于光学轴线的方向通到形成在缩放凸轮筒136的一个边缘表面上的凸轮插入开口136D。凸轮凹槽136B通到形成在缩放凸轮筒136同一边缘表面的凸轮插入开口136E,从而不与凸轮插入开口136D干涉。
聚焦凸轮筒137具有预定形状的凸轮凹槽137A。该凸轮凹槽穿透聚焦凸轮筒137的外表面。凸轮凹槽137A通到形成在聚焦凸轮筒137一个边缘表面的凸轮插入开口137A。
图6为显示按照第一实施例图像采集装置透镜框架、底座和凸轮筒连接状态的立体图。在图4和6中,销子132A配合在凸轮凹槽136A中。依照这样的配合,第一透镜框架132固定在缩放凸轮筒136上。销子133A配合在凸轮凹槽136B中。依照这样的配合,第二透镜框架133固定在缩放凸轮筒136上。销子134A配合在凸轮凹槽137A中。依照这样的配合,第三透镜框架134固定在聚焦筒137上。
由缩放凸轮筒136内表面和管座131固定筒131A外表面形成的配合结构用作固定于缩放凸轮筒136上的转子142的旋转的轴承。还有,由聚焦凸轮筒137内表面和管座131固定筒131A外表面形成的配合结构用作固定于聚焦凸轮筒137上的转子152的旋转的轴承。
在图1中,缩放马达140包括以光学轴线101作为中心轴的圆柱形定子141和设置在定子151内、以光学轴线101作为中心轴的圆柱形转子142。定子141上设置用作定子磁轭的透镜体143和定子线圈141A。转子142上设置转子磁铁142A和转子磁轭142B。转子磁轭142B具有用于减少从转子磁铁142A边缘漏出磁通的凸缘部分142C。
在图1中,聚焦马达150包括以光学轴线101作为中心轴的圆柱形定子151和设置在定子141内以光学轴线101作为中心轴的圆柱形转子152。定子151上设置用作定子磁轭的透镜体143和定子线圈151A。转子152上设置转子磁铁152A和转子磁轭152B。转子磁轭152B具有用于减少从转子磁铁152A边缘漏出磁通的凸缘部分152C。
图7为按照第一实施例图像采集装置中缩放马达的立体图。在图1和7中形成固定在透镜体143内表面上的定子线圈141A,使多个螺旋缠绕的小线圈按照预定节距沿透镜体143内表面设置。
透镜体143为典型地由平板卷制的磁钢薄板形成的磁铁体。透镜体143具有沿平行于光学轴线方向的延伸的圆柱形状。
转子磁铁142A由具有与定子线圈141A的小线圈的数目一样磁极的永久磁铁实现。磁极的设置方式使N极和S极交错地沿转子磁轭142B的周边设置。
转子磁轭142B粘着在转子磁铁142A内表面。转子磁轭142B典型地由铁磁体形成,诸如平板卷制的磁钢薄板。转子磁轭142B粘着在缩放凸轮筒136外表面。
包括作为定子磁轭的透镜体143的定子141、定子线圈141A、转子磁铁142A和转子磁轭142B共同形成缩放马达140的磁回路。在缩放马达140中,磁回路由在预定时间外部施加于定子小线圈141A的电流所驱动,从而作为电磁马达旋转转子磁铁142A和转子磁轭142B。
在图7中,显示缩放马达140的结构。聚焦马达150相似于缩放马达140的结构。
就是说,固定在透镜体143内表面的定子线圈151A如此形成,使多个螺旋卷绕的小线圈沿透镜体143内表面按预定节距设置。转子磁轭152B粘着在聚焦凸轮筒137外表面。转子磁轭152B典型地由铁磁体形成,诸如平板卷制的磁钢薄板。
转子磁铁152A粘着在转子磁轭152B的外表面上。转子磁铁152A典型地由具有与定子线圈151A的小线圈的数目一样磁极的永久磁铁实现。磁极的设置方式使N极和S极交错地沿转子磁轭152B的周边设置。
包括作为定子磁轭的透镜体143的定子151、定子线圈151A、转子磁铁152A和转子磁轭152B形成聚焦马达150的磁回路。
在聚焦马达150中,磁回路被在外部按预定时间施加于定子线圈151A的小线圈上电流所驱动,从而作为电磁马达转动转子磁铁152A和转子磁轭152B。
在图1中,前盖160具有垂直于光学轴线101的碟形。前盖160在最接近于物体的位置固定在图像采集装置100上。前盖160具有用于支承引导轴135的通孔160B和在物体一侧固定固定筒131A边缘的固定部分160A。
在物体一侧的透镜体143的一个边缘由前盖160所支承。还有,在图像一侧透镜体143的外边缘由管座131的凸缘部分131B所支承。依照透镜体143为前盖160和管座131所支承的情况,定子线圈141A和转子磁铁142A之间的空间和定子线圈151A和转子磁铁152A之间的空间可适当地维持。
铁磁板170为环形,并且典型地由铁磁体实现,诸如平板卷制磁钢薄板。铁磁板170固定在转子磁铁142A在平行于前盖160的光学轴线方向在图像一侧的对面位置上。铁磁板170在垂直于光学轴线方向上的高度大约等于透镜体143内表面和缩放凸轮筒136外表面之间的高度。
在铁磁板170和转子142的转子磁铁142A之间,发生磁吸引力。依照这样的磁吸引力,永远存在平行于光学轴线方向朝向物体一侧施加于转子142的力。就是说,转子磁铁142A和铁磁板170形成施加力于转子142的装置。
铁磁板180典型地由铁磁体实现,诸如环形的平板卷制磁钢薄板。铁磁板180固定在转子磁铁152A在平行于凸缘部分131B的光学轴线方向在物体一侧的对面位置上。铁磁板180在垂直于光学轴线方向上的高度大约等于透镜体143内表面和聚焦凸轮筒137外表面之间的高度。
在铁磁板180和转子152的转子磁铁152A之间,发生磁吸引力。依照这样的磁吸引力,永远存在平行于光学轴线101方向朝向图像一侧施加于转子152的力。就是说,转子磁铁152A和铁磁板180形成施加力于转子152的装置。
转子142上施加朝向物体一侧的力。而转子152上施加朝向图像一侧的力。就是说,转子142上施加的力使其离开转子152方向。
在上述结构中,当执行缩放时,有外部驱动电流按预定时间施加于缩放马达140定子线圈141A的小线圈上。随着施加驱动电流,通过永远朝向物体一侧从加力装置所施加的力,磁回路被驱动而促使转子围绕光学轴线旋转。
随着转子142围绕光学轴线旋转,缩放凸轮筒136围绕光学轴线旋转。随着缩放凸轮筒136围绕光学轴线旋转,设置在第一透镜框架132上的销子132A引导沿着配合销子132A的凸轮凹槽136A移动。还有,随着缩放凸轮筒136围绕光学轴线旋转,设置在第二透镜框架133上的销子133A引导沿着配合销子133A的凸轮凹槽136B移动。
由于旋转调节部分132B配合在管座131的引导部分131D中,第一透镜框架132调节成为不致自由地围绕在垂直于光学轴线101平面上的引导轴135旋转。因此,当缩放凸轮筒136围绕光学轴线旋转,旋转运动转换为直线向前运动,从而造成第一透镜框架132向平行于光学轴线的方向按照凸轮凹槽136A的相位移动。
还有,由于旋转调节部分133B配合在管座131的引导部分131D中,第二透镜框架133调节成为不致自由地围绕在垂直于光学轴线101平面上的引导轴135旋转。因此,当缩放凸轮筒136围绕光学轴线旋转,旋转运动转换为直线向前运动,从而造成第二透镜框架133向平行于光学轴线的方向按照凸轮凹槽136B的相位移动。
同样地,透镜筒130包括在平行于光学轴线101方向可移动地夹持第一缩放透镜组111的夹持机构。该夹持机构包括管座131的固定筒131A、第一透镜框架132和引导轴135。
还有,透镜筒130包括转换转子142的旋转运动成为直线向前运动的转换机构,以便促使第二缩放透镜组112在平行于光学轴线101方向移动。该转换机构包括缩放凸轮筒136和设置在第一透镜框架132上的销子132A。
此外,透镜筒130包括在平行于光学轴线101方向可移动地夹持第二缩放透镜组112的夹持机构。该夹持机构包括管座131的固定筒131A、第二透镜框架133和引导轴135。
另外,透镜筒130包括转换转子142的旋转运动成为直线向前运动的转换机构,以便促使第二缩放透镜组112在平行于光学轴线101方向移动。该转换机构包括缩放凸轮筒136和设置在第二透镜框架133上的销子133A。
随着第一透镜框架132和第二透镜框架133的移动,第一缩放透镜组111和第二缩放透镜组112也移动,而改变它们之间的空隙,并在平行于光学轴线101方向到达各自预定的位置。
当执行聚焦时,在外部对于聚焦马达150的定子线圈151A的小线圈按照预定时间施加驱动电流。随着驱动电流的施加,通过永远朝向图像一侧从加力装置所施加的力,磁回路被驱动而促使转子152围绕光学轴线旋转。
随着转子152围绕光学轴线旋转,聚焦凸轮筒137围绕光学轴线旋转。随着聚焦凸轮筒137围绕光学轴线旋转,设置在第三透镜框架134上的销子134A引导沿着配合销子134A的凸轮凹槽137A移动。
由于旋转调节部分134B配合在管座131的引导部分131D中,第三透镜框架134调节成为不致自由地围绕在垂直于光学轴线101平面上的引导轴135旋转。因此,当聚焦凸轮筒137围绕光学轴线旋转,旋转运动转换为直线向前运动,从而造成第三透镜框架134向平行于光学轴线的方向按照凸轮凹槽137A的相位移动。
同样地,透镜筒130包括在平行于光学轴线101方向可移动地夹持聚焦透镜组112的夹持机构。该夹持机构包括管座131的固定筒131A、第三透镜框架134和引导轴135。
还有,透镜筒130包括转换转子152的旋转运动成为直线向前运动的转换机构,以便促使聚焦缩放透镜组113在平行于光学轴线101方向移动。该转换机构包括缩放凸轮筒136和设置在第三透镜框架134上的销子134A。
随着第三透镜框架134移动,聚焦缩放透镜组113在平行于光学轴线方向移动到预定位置。结果,图像采集装置100执行聚焦操作。
由于缩放马达140和聚焦马达150可以独立地被驱动,因此可以执行各种控制。正常情况下,缩放马达首先为缩放而驱动,然后分析从图像采集传感器120输出的图像信号。然后,聚焦透镜组113被移动以便聚焦到可以对于图像信号的一个图像提供最高对比的位置。
在执行聚焦后,可以执行所谓连续自动聚焦(AF)控制,使从图像采集传感器120的输出信号按顺序聚焦的预定间隔进行分析。可替代地,可以执行所谓一次自动聚焦(AF)控制,使聚焦只在预定时间执行。
上述透镜筒130可如以下进行装配。
(1)凸轮筒的装配
首先,转子磁轭142B固定到缩放凸轮筒136的外表面,然后转子磁铁142A固定到转子磁轭142B上。相似地,转子磁轭152B固定到聚焦凸轮筒137的外表面,然后转子磁铁152A固定到转子磁轭152B上。
(2)聚焦凸轮筒和第三透镜框架之间的连接
其次,随着引导轴135和铁磁板180已经事先安装,组装的聚焦凸轮筒137连接到管座131的固定筒131A,使其与固定筒131A的外表面接触。其次,随着聚焦透镜组113已经事先安装,第三透镜框架114插入固定筒131A,使其与固定筒131A内表面接触。
与此同时,第三透镜框架134从物体一侧插入固定筒131A,使第三透镜框架134旋转调节部分134B连接到管座131的引导部分131D并且引导轴135穿过第三透镜框架134的通孔134C。当第三透镜框架134的销子134A到达聚焦凸轮筒137,销子134A从凸轮插入开口137A配合在凸轮凹槽137A中。
(3)缩放凸轮筒和第一及第二透镜框架之间的连接
还有,组装的缩放凸轮筒136连接到管座131的固定筒131A,使其与固定筒131A的外表面接触。其次,随着第二缩放透镜组112已经事先安装,第二透镜框架133插入固定筒131A,使其与固定筒131A内表面接触。与此同时,第二透镜框架133旋转调节部分133B连接到管座131的引导部分131D。还有,引导轴135穿过第二透镜框架133的通孔135C,使第二透镜框架从物体一侧插入固定筒131A。当第二透镜框架133的销子133A到达缩放凸轮筒136时,销子133A从凸轮插入开口136D配合在凸轮凹槽136A中。
随着第一缩放透镜组111已经事先装上,第一透镜框架以相似于上述方式装配,使销子132A从凸轮插入开口136D配合在凹槽136A中,以便把第一透镜框架132插入固定筒131A。
(4)透镜体和前盖的安装
其次,随着定子线圈141A和定子线圈151A已经事先粘着在内表面,透镜体143插入并粘着在管座131的凸缘部分131B的预定位置。此外,随着铁磁板170事先固定,装上前盖160。然后,引导轴135、管座131的固定筒131A和透镜体143粘着到前盖160上。按照上述装配安排,透镜筒130装配完成。
如以上所述,按照第一实施例图像采集装置100的透镜筒130包括在平行于光学轴线方向对物体一侧施加力于缩放马达140的转子142的施力装置。因此,即使在平行于光学轴线方向的轴承长度较短,转子142可以永远相对于定子141保持稳定位置。如此,转子142可以获得很高的定位精度。
还有,只有当加入铁磁板170以后,施力装置才可以获得力。因此,透镜筒130不需要在平行和垂直于光学轴线方向做成很大。
具体地说,形成施力装置的铁磁板170为环形。因此,对于转子142在平行于光学轴线方向围绕光学轴线的整个圆周上可以均匀地施加力。如此,转子142可以对于定子141保持稳定位置。
此外,在按照第一实施例图像采集装置100的透镜筒130中,转子142的施力装置和转子152的施力装置如此施加力量使两个施力装置互相离开。如此,各转子可以独立地对于相关定子稳定在位置上。在按照第一实施例图像采集装置100中,凸缘部分142C在位置上相反于凸缘部分152C,从而防止在转子磁铁142A和转子磁铁152A之间发生磁性干涉。如此,转子可以互相邻近设置,从而使透镜筒在光学轴线101方向较短。
同样地,按照第一实施例图像采集装置100的透镜筒130,有可能提供一种具有包括可以高精度地定位圆柱形转子的磁性马达的紧凑透镜筒。
还有,按照第一实施例图像采集装置100,有可能提供包括上述透镜筒的紧凑型图像采集装置。
第二实施例
图8为按照第二实施例图像采集装置的包括在其透镜筒内的透镜体的立体图。注意按照第二实施例图像采集装置具有相似于按照第一实施例的图像采集装置100的结构。在第二实施例中,只有不同于第一实施例的部件予以描述。
在图8中,透镜体243典型地由诸如平板卷制的磁钢薄板的铁磁体实现。透镜体143具有沿平行于光学轴线方向延伸的大致圆柱形状。
透镜体243包括从透镜体243边缘延伸并且在垂直于平行于光学轴线方向的方向弯曲的定子突出部分243A。还有,透镜体243在其周边上设置六个各具有预定长度的缺口部分243B。
图9为显示按照第二实施例图像采集装置中透镜体和包括在透镜体中的转子之间的关系的剖面图。在图9中,定子突出部分243A在位置上相反于在平行于光学轴线方向具有环形的转子142的转子磁铁142A。还有,缺口部分243B在位置上相反于转子142和转子152互相邻近的部分。
还有,随着透镜体243典型地由铁磁体实现,在定子突出部分243A和转子的转子磁铁142A之间发生磁力吸引。因此,如同在第一实施例中的铁磁板170,定子突出部分243A和转子磁铁142A共同地形成施力装置。
还有,在图9中,缺口部分在位置上相反于转子142A和转子152A互相邻近的部分。依照这样的机构,磁通密度只有在从转子磁铁142A和转子磁铁152A延伸到用作定子磁轭的透镜体243区域中是低的。
在此,在转子磁铁142A和转子磁铁152A之间,在从低磁通密度到高磁通密度方向发生磁力吸引。如此,对转子142和转子152上施加的力使其离开缺口部分243B。
因此,缺口部分243B和转子磁铁142A形成对于转子142在平行于光学轴线方向朝物体一侧施加力量的施力装置。还有,缺口部分243B和转子磁铁152A形成对于转子152在平行于光学轴线方向朝图像一侧施加力量的施力装置。
如以上所描述,按照第二实施例图像采集装置的透镜筒包括对于缩放马达140的转子142在平行于光学轴线方向朝物体一侧施加力量的施力装置。因此,即使在平行于光学轴线方向的轴承长度较短,转子142对于定子141可以永远保持稳定位置。如此,转子可以获得高定位精度。
还有,可以获得施力装置而不必增加部件的数量。因此透镜筒130不必在垂直和平行于光学轴线方向做得很大。
具体地说,定子突出部分243A形成的施力装置为环形。因此,对于转子142在平行于光学轴线方向围绕光学轴线的整个圆周上可以均匀地施加力。如此,转子142可以对于定子141保持稳定位置。
相似地,按照第二实施例图像采集装置100的透镜筒130包括在平行于光学轴线方向对图像一侧施加力于聚焦马达150的转子152的施力装置。因此,即使在平行于光学轴线方向的轴承长度较短,转子152可以永远相对于定子151保持稳定位置。如此,转子152可以获得很高的定位精度。
还有,可以获得施力装置而不必增加部件的数量。因此透镜筒130不必在垂直和平行于光学轴线方向做得很大。
具体地说,缺口部分243A形成的施力装置设置在转子142和转子152围绕光学轴线预定的空间。因此,对于转子142和转子152在平行于光学轴线方向围绕光学轴线的整个圆周上可以均匀地施加力。如此,转子142可以对于定子141保持稳定位置,并且转子152可以对于定子151保持稳定位置。
此外,在按照第二实施例图像采集装置100的透镜筒130中,转子142的施力装置和转子152的施力装置如此施加力量使两个施力装置互相离开。如此,各转子可以独立地对于相关定子稳定在位置上。
同样地,在按照第二实施例图像采集装置100的透镜筒130中,有可能提供具有包括可高精度定位圆柱形转子的磁性马达的紧凑透镜筒。
第三实施例
图10为按照第三实施例图像采集装置中包括在透镜筒中的转子的剖面图。注意按照第三实施例图像采集装置具有相似于按照第一实施例的图像采集装置100的结构。在第三实施例中,只有不同于第一实施例的部件予以描述。
转子342相似于按照第一实施例的转子142,除去有一个环形推斥磁铁342B单独地从转子磁铁342A在图像一侧设置在转子342边缘上。
该推斥磁铁342B单独地从转子磁铁342A设置,并且典型地由以N极在平行于光学轴线方向面对图像一侧的永久磁铁实现。
转子352在结构方面相似于按照第一实施例的转子152,除去有一个环形推斥磁铁352B单独地从转子磁铁352A在物体一侧设置在转子352边缘上。
该推斥磁铁352B单独地从转子磁铁352A设置,并且典型地由以N极在平行于光学轴线方向面对物体一侧的永久磁铁实现。
依照上述结构,在推斥磁铁342B和推斥磁铁352B之间发生磁性推斥力。该推斥力在平行于光学轴线方向施加在转子342对物体一侧。还有,该推斥力在平行于光学轴线方向施加在转子352对图像一侧。如此,推斥磁铁342B和推斥磁铁352B形成施力装置。
如以上所描述,按照第三实施例图像采集装置的透镜筒包括对于转子342在平行于光学轴线方向朝物体一侧施加力量的施力装置。因此,即使在平行于光学轴线方向的轴承长度较短,转子342对于定子141可以永远保持稳定位置。如此,转子342可以获得高定位精度。
相似地,按照第三实施例图像采集装置的透镜筒包括对于转子352在平行于光学轴线方向朝图像一侧施加力量的施力装置。因此,即使在平行于光学轴线方向的轴承长度较短,转子352对于定子151可以永远保持稳定位置。如此,转子352可以获得高定位精度。
此外,只有通过加入具有其直径等于转子磁铁的推斥磁铁342B和352B才可以形成施力装置。因此,透镜筒130不必在平行和垂直于光学轴线方向做成很大。
具体地说,推斥磁铁342B和352B形成的施力装置各为环形。因此,对于各转子在平行于光学轴线方向围绕光学轴线的整个圆周上可以均匀地施加力。如此,转子142对于定子141可保持稳定位置,并且转子152也可对于定子151保持稳定位置。
此外,在按照第三实施例图像采集装置的透镜筒130中,转子342的施力装置和转子352的施力装置如此施加力量使两个施力装置互相离开。如此,各转子可以独立地对于相关定子稳定在位置上。
同样地,按照第三实施例图像采集装置100的透镜筒130,有可能提供一种具有包括可以高精度地定位圆柱形转子的磁性马达的紧凑透镜筒。
第四实施例
图11为显示按照第四实施例图像采集装置中透镜筒基本零件的立体图。注意,按照第四实施例图像采集装置400具有相似于按照第一实施例的图像采集装置100的结构和包括在其中的透镜筒130。在第四实施例中,只有不同于第一实施例的部件予以描述。
图11显示按照第四实施例透镜筒430,其中已经除去缩放凸轮筒136和聚焦凸轮筒137外面的部件。就是说,图11对应于阐明按照第一实施例的透镜筒130的图4。按照第四实施例的透镜筒430包括代替按照第一实施例中透镜筒130管座131的管座431,和三个轴431A、431B及431C。
三个轴431A、431B及431C为不锈钢制成的杆状物体,在平行于光学轴线101方向延伸。如同管座131的固定筒131A,这三个轴431A、431B及431C支承第一透镜框架432、第二透镜框架433和第三透镜框架434。
第一透镜框架432相似于按照第一实施例的第一透镜框架132,除去设置旋转调接部分432A代替旋转调节部分132A以支持轴431A。
第二透镜框架433相似于按照第一实施例的第二透镜框架133,除去设置旋转调接部分433A代替旋转调节部分133A以支持轴431A。
第三透镜框架434相似于按照第一实施例的第三透镜框架134,除去设置旋转调接部分434A代替旋转调节部分134A以支持轴431A。
轴431A由第一透镜框架432的旋转调节部分432A、第二透镜框架433的旋转调节部分433A、和第三透镜框架434的旋转调节部分434A所支持。依此,各透镜框架的旋转如此调节使其不致自由地围绕在垂直于光学轴线的平面上的轴431A旋转。
三个轴431A、431B及431C如此配置,使共同地包围这些轴的外切圆具有等于凸轮筒136和137内直径的直径。还有,引导轴135设置在较该外切圆更接近于光学轴线的位置。因此透镜筒内的空间可以有效地利用。
还有,与按照第一实施例透镜筒130内的固定筒131A相比,用不锈钢制成的三个轴431A、431B及431C可减少与各凸轮筒的摩擦系数。因此,这些轴可用作各凸轮筒围绕光学轴线旋转的轴承。
第五实施例
图12为按照第五实施例图像采集装置的纵向剖面图。按照第五实施例图像采集装置500包括图像采集光学系统110、图像采集传感器120和透镜筒530。注意在图12中,相同于第一实施例中的部件用同样的参考数字标识,并且不再在此描述。
透镜筒530包括管座531、第一透镜框架532、第二透镜框架533、第三透镜框架534、引导轴535A、缩放凸轮筒536、聚焦凸轮筒537、缩放马达540、聚焦马达550和前盖560。还有,透镜筒530包括三个不在图12中显示的轴,即支承轴535B、支承轴535C和支承轴535D。
图13为显示按照第五实施例图像采集装置零件的立体图。图13显示图像采集装置500的机构,其中缩放凸轮筒536、聚焦凸轮筒537、缩放马达540、聚焦马达550和前盖560已拆去。
在图12和13中,管座531具有垂直于光学轴线101的碟形。管座531在中心具有矩形开口,并且支持从最接近物体开始依次为低通滤器114和图像采集传感器120。还有,管座531支持引导轴535A和支承轴535B-D。
第一透镜框架532支承第一缩放透镜组111。第一透镜框架532具有以光学轴线为中心轴线的大致圆柱形状。第一透镜框架532在其周边设置凸轮销532A、旋转调节部分532B和面对平行于光学轴线101方向的通孔532C。凸轮销532A接合在没有显示而设置在缩放凸轮筒536中的凸轮凹槽中。旋转调节部分532B接合在支承轴535B中,其中在垂直于光学轴线方向形成轻微的松动。引导轴535A配合在通孔532C中。
第二透镜筒框架533夹持第二缩放透镜组112。第二透镜框架533具有以光学轴线为中心轴线的大致圆柱形状。第二透镜框架533在结构上相似于第一透镜框架532。就是说,第二透镜框架533在其周边设置在外表面方向突出的凸轮销(未示)、旋转调节部分(未示)和面对平行于光学轴线101方向的通孔(未示)。凸轮销接合在没有显示而设置在缩放凸轮筒536中的凸轮凹槽中。旋转调节部分与支承轴535B接合。通孔用来以穿入方式夹持引导轴535A。
第三透镜筒框架534夹持聚焦透镜组113。第三透镜框架534具有大致圆柱形状。第三透镜框架534在结构上相似于第一透镜框架532。就是说,第三透镜框架533在其周边设置在外表面方向突出的凸轮销(未示)、旋转调节部分(未示)和面对平行于光学轴线101方向的通孔(未示)。凸轮销接合在没有显示而设置在聚焦凸轮筒537中的凸轮凹槽中。旋转调节部分与支承轴535B接合。通孔用来以穿入方式夹持引导轴535A。
缩放凸轮筒536和聚焦凸轮筒537各具有圆柱形状。缩放凸轮筒536和聚焦凸轮筒537具有共同合用的中心轴线102,并且可以围绕该中心轴线102旋转。该中心轴线102处于由在垂直于光学轴线平面上的三个支承轴535B-D形成的外切圆中心。就是说,三个支承轴535B-D用作缩放凸轮筒536和聚焦凸轮筒537的旋转轴线轴承。在此,图像采集光学系统110的光学轴线101并不与中心轴线102符合一致。
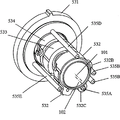
在缩放凸轮筒536和聚焦凸轮筒537的周边周围,设置缩放马达540和聚焦马达550。缩放马达540包括定子541和转子542。定子541包括作为定子磁轭的透镜体543,和定子线圈541A。转子542包括转子磁铁542A和转子磁轭542B。
聚焦马达550包括定子551和转子552。定子551包括作为定子磁轭的透镜体543,该磁轭由缩放马达540和定子线圈551A共用。转子552包括转子磁铁552A和转子磁轭552B。图14为按照第五实施例图像采集装置的缩放马达分解立体图。在图12和14中,透镜体543具有围绕中心轴线102形成的圆柱形状。透镜体543典型地由诸如平板卷制的磁钢薄板的铁磁体实现,并且是由管座531和前盖560所夹持的固定筒,这将在以下进一步描述。
固定在透镜体543内表面的定子线圈541A是如此形成,使多个螺旋卷绕的小线圈按预定节距沿透镜体543的内表面设置。转子磁铁542A典型地由具有与定子线圈541A的小线圈的数目一样的磁极的永久磁铁实现。磁极的设置方式使N极和S极交错地沿转子磁轭542B的周边设置。转子磁轭542B典型地由诸如平板卷制的磁钢薄板的铁磁体实现,并且设置在转子磁铁542A和缩放凸轮筒536之间。
作为定子磁轭的透镜体543、定子线圈541A、转子磁铁542A和转子磁轭542B形成磁回路。在缩放马达540中,磁回路被按照预定时间在外部施加于定子线圈541A的小线圈中电流所驱动,从而促使转子磁铁542A和转子磁轭542B旋转并用作电磁马达。
聚焦马达550具有相似于图14所示缩放马达540的结构。就是说,固定在透镜体543内表面的定子线圈551A如此形成,使多个螺旋卷绕的小线圈按预定节距沿透镜体543的内表面设置。转子磁轭552B粘着在聚焦凸轮筒537的外表面上。转子磁轭552B典型地由诸如平板卷制的磁钢薄板的铁磁体形成。
转子磁铁552A粘着在转子磁轭552B的周边上。转子磁铁552A典型地由具有与定子线圈551A的小线圈的数目一样的磁极的永久磁铁实现。磁极的设置方式使N极和S极交错地沿转子磁轭552B的周边设置。
包括作为定子磁轭的透镜体543和定子线圈551A的定子551、转子磁铁552A和转子磁轭552B共同形成聚焦马达550的磁回路。在聚焦马达550中,磁回路被按照预定时间在外部施加于定子线圈551A的小线圈中电流所驱动,从而促使转子磁铁542A和转子磁轭542B旋转并用作电磁马达。
在图12中,前盖560具有垂直于光学轴线101的碟形。前盖560在最接近于物体的位置固定在图像采集装置500的一侧。前盖160具有用于支承引导轴535A的通孔。
在物体一侧的透镜体543的一个边缘由前盖560所支持。在图像一侧透镜体543的另一边由管座531所支持。随着透镜体543被前盖560和管座531所支持,在定子线圈541A和转子磁铁542A之间的空间和定子线圈551A和转子磁铁552A之间的空间可以适当地保持。
铁磁板170和180具有与第一实施例中描述的相似结构。依照这样的结构,如同第一实施例,在铁磁板170和转子542的转子磁铁542A之间发生磁性吸引力。随着这样的磁性吸引,永远存在平行于光学轴线方向朝向物体一侧施加于转子542的力。就是说,转子磁铁542A和铁磁板170形成施加力于转子542的装置。
还有,如同第一实施例,在铁磁板180和转子552的转子磁铁552A之间发生磁性吸引力。随着这样的磁性吸引,永远存在平行于光学轴线101方向朝向图像一侧施加于转子552的力。就是说,转子磁铁552A和铁磁板180形成施加力于转子552的装置。
在这样的方式中,转子542被施加向物体一侧的力,而转子552被施加向图像一侧的力。就是说,转子542被施加从离开转子552方向的力。
在上述结构中,当执行缩放时,外部驱动电流按预定时间施加于缩放马达540的定子线圈541A的小线圈上。随着施加驱动电流,磁回路被驱动而促使转子542围绕中心轴线102旋转。
随着转子542围绕中心轴线102旋转,缩放凸轮筒536围绕中心轴线102旋转。随着缩放凸轮筒536围绕中心轴线102旋转,设置在第一透镜框架532上的凸轮销子532A引导沿着配合凸轮销子532A的凸轮凹槽移动。还有,随着缩放凸轮筒536围绕光学轴线旋转,设置在第二透镜框架533上的凸轮销子引导沿着配合凸轮销子的凸轮凹槽移动。
第一透镜框架532被引导轴535A如此引导使其向平行于光学轴线方向移动。与此同时,由于旋转调节部分532B接合在支承轴535B中,第一透镜框架532被如此调节使其不致自由地围绕在垂直于光学轴线的平面上的引导轴535A旋转。因此,当缩放凸轮筒536围绕光学轴线旋转时,旋转运动被转换为直线向前的运动,从而促使第一透镜框架532按照凸轮凹槽的相位在平行于光学轴线的方向移动。就是说,缩放凸轮筒536的凸轮凹槽和第一透镜框架532的凸轮销子532A形成转换机构。
还有,相似地,随着旋转调节部分和支承轴535B的接合,第二透镜框架533被如此调节使其不致自由地围绕垂直于光学轴线101的平面上的引导轴535A旋转。因此,当缩放凸轮筒536围绕光学轴线旋转,旋转运动转换为直线向前运动,从而造成第二透镜框架533向平行于光学轴线的方向按照凸轮凹槽136A的相位移动。
随着第一透镜框架532和第二透镜框架533的移动,第一缩放透镜组111和第二缩放透镜组112也移动,而改变它们之间的空间,并在平行于光学轴线101方向到达预定位置。结果,图像采集装置500能够执行缩放。
当执行聚焦时,外部驱动电流按预定时间施加于聚焦马达550的定子线圈551A的小线圈上。随着施加驱动电流,磁回路被驱动而促使转子552围绕光学轴线旋转。
随着转子552围绕光学轴线旋转,聚焦凸轮筒537围绕光学轴线旋转。随着聚焦凸轮筒537围绕光学轴线旋转,设置在第三透镜框架534上的凸轮销子被引导沿着配合凸轮销子的凸轮凹槽移动。
随着旋转调节部分和支承轴535B的接合,第三透镜框架534被如此调节使其不致自由地围绕垂直于光学轴线101的平面上的引导轴535A旋转。因此,当聚焦凸轮筒537围绕光学轴线旋转,旋转运动转换为直线向前运动,从而造成第三透镜框架534向平行于光学轴线的方向按照凸轮凹槽的相位移动。
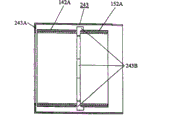
图15为描述按照第五实施例图像采集装置的透镜筒中第一透镜框架、引导轴和三个支承轴之间位置关系的立体图。图16为描述按照第五实施例图像采集装置的透镜筒中第一透镜框架、引导轴和三个支承轴之间位置关系的正视图。注意在图16中,A-A剖面对应于图12中的剖面图。
在图15和16中三个支承轴535B-535D限定外切圆C1。外切圆C1具有对应于缩放凸轮筒536的内径。另一方面,虚拟圆C0具有对应于当光学轴线与作为固定筒的透镜体543中心轴线符合时(采取支承轴535B的接触点作为参考)所要求的缩放凸轮筒的内径。
从图15和16可以看出,在按照第五实施例的透镜筒中,外切圆C1的直径小于虚拟圆C0的直径。就是说,在按照第五实施例的透镜筒中,光学轴线101和作为固定筒透镜体543中心轴线102互相并不符合一致,而是互相在平行上偏移。如此,缩放凸轮筒536可以制成紧凑部件。
还有,在按照第五实施例的透镜筒中,由引导轴535A及支承轴535B和中心轴线所形成的中心角θ1小于180度。因此,在作为固定筒的透镜体543的光学轴线101和中心轴线102之间的偏移量显著地较大。因此,缩放凸轮筒536的前表面与传统的透镜筒相比,特别在垂直于光学轴线方向,再可以做得紧凑。
随着缩放凸轮筒536做得较小。固定筒和设置在缩放凸轮筒536周边的其它部件也可以做得较小。因此,整个透镜筒的尺寸可以缩小。还有,在按照第五实施例的透镜筒中,由引导轴535A及支承轴535B和中心轴线102所形成的中心角θ1不大于90度。因此,偏移量显著地较大。
如以上描述,按照第五实施例图像采集装置500的透镜筒530包括对于转子542在平行于光学轴线方向朝物体一侧施加力量的施力装置。因此,即使平行于光学轴线方向的轴承长度较短,转子542也可以对于定子541经常保持在稳定位置。如此,可以获得转子542高精度定位。
相似地,按照第五实施例图像采集装置500的透镜筒530包括对于转子552在平行于光学轴线方向朝图像一侧施加力量的施力装置。因此,即使平行于光学轴线方向的轴承长度较短,转子552也可以对于定子551经常保持在稳定位置。如此,可以获得转子552高精度定位。
在按照第五实施例图像采集装置500的透镜筒530中,转子542的施力装置和转子552的施力装置如此施加力量使两个施力装置互相离开。如此,各转子可以独立地对于相关定子稳定在位置上。
还有,在按照第五实施例图像采集装置500的透镜筒530中,光学轴线101和透镜体543中心轴线102互相并不符合一致,而是互相在平行上偏移。因此与第一实施例相比,透镜筒在垂直于光学轴线101方向可以做成很小。
其它实施例
在以上各实施例中,透镜筒示例地包括两个电磁马达,即,缩放马达和聚焦马达。这并不是限制性的。在所谓泛焦的情况中可以只设置缩放马达,在该情况中,图像采集装置只具有缩放功能而其调焦设置在固定而有限的拍摄距离上。
相反,在图像采集装置没有缩放功能而只有单焦透镜执行调焦的情况中,可以只设置聚焦马达。
按照在缩放时透镜的移动状态,由缩放马达所驱动的透镜组数目可以是一、三或更多。相似地,按照在聚焦时透镜的移动状态,由聚焦马达所驱动的透镜组数目可以是一、三或更多。
还有在上述实施例中透镜筒的转换机构和移动机构各包括旋转凸轮筒和直线向前透镜框架。这并不意味着是限制性的。机构可以包括旋转凸轮筒和连接的旋转透镜框架,或者可以包括旋转筒和与螺钉连接的旋转透镜框架。
此外,施力装置可以适当地变型。例如,如同第一实施例,可以单独地对转子从转子磁铁设置另一吸引磁铁使其处于铁磁板的对面。
还有,代替铁磁板可以设置永久磁铁使吸引磁铁和磁极互相在极性上相反,从而产生力。
还有,代替铁磁板可以设置永久磁铁以便吸引转子磁轭,从而产生力。
还有,铁磁板、推斥磁铁、和吸引磁铁可为形成在光学轴线整个周边的环形。例如,可以每隔120度设置三个小铁磁板以便相反于转子。可替代地,可以每隔90度设置四个小铁磁板以便相反于转子。同样地,可以个别地施加力。
不过,即使个别地施加力,要求施力装置按预定节距设置使其可以围绕光学轴线整个周边均匀地施加力。也要求个别地产生的力在平行于光学轴线方向均匀。
还有,在各实施例透镜筒电磁马达中,定子包括定子线圈,和转子包括转子磁铁。但这并不意味着是限制性的。电磁马达可以如此配置,使定子包括定子磁铁,和转子包括转子线圈,其中电流供给到转子一侧。
依照以上结构的电磁马达,转子的转动慣量可以减少,从而改进旋转控制特性,诸如定位正确度。不过,与第一实施例的结构相比,容许驱动电流联接到转子线圈的结构是复杂的。因此,应按照要求特性选择两结构之一。
透镜筒和图像采集装置适合于要求缩小尺寸和先进功能的数字照相机和数字摄影机、蜂窝电话和具有照相功能的个人数字助理等。
以上已经详细地描述新颖概念,前面的描述在各方面仅为说明性的而不是限制性的。应该理解可以设计出无数其它变型和变化而不致偏离本发明的范围。
Claims (43)
1. 一种夹持至少一个透镜组的透镜筒,包括:
第一透镜框架,用于支持第一透镜组;
第一电磁马达,包括第一圆柱形定子,以平行于光学轴线的轴线作为中心轴线,和与第一圆柱形定子同轴并且相对于第一圆柱形定子围绕中心轴线旋转的第一圆柱形转子;
第一凸轮筒或旋转筒,可操作地连接于第一透镜框架以便将第一圆柱形转子的旋转运动转换成为直线运动而在平行于光学轴线的方向移动第一透镜框架和第一透镜组;和
第一铁磁材料,它相对于第一圆柱形转子的一端定位,用于对第一圆柱形转子在平行于光学轴线的方向施加磁性力。
2. 按照权利要求1所述的透镜筒,其特征在于,还包括:
转子磁铁,其相对于第一圆柱形转子如此定位,使得在第一铁磁材料和转子磁铁之间形成磁性吸引力。
3. 按照权利要求2所述的透镜筒,其特征在于,第一铁磁材料为铁磁板。
4. 按照权利要求3所述的透镜筒,其特征在于,转子磁铁是圆柱形状,和
构成第一铁磁材料的铁磁板为环形。
5. 按照权利要求2所述的透镜筒,其特征在于,第一圆柱形定子包括与第一圆柱形转子同轴的圆柱形定子磁轭,并且圆柱形定子磁轭包括相对于转子磁铁边缘向内延伸的、构成第一铁磁材料的环状物。
6. 按照权利要求2所述的透镜筒,其特征在于,第一圆柱形定子包括与第一圆柱形转子同轴的圆柱形定子磁轭,并且在圆柱形定子磁轭中在相对于转子磁铁边缘位置上形成缺口。
7. 按照权利要求1所述的透镜筒,其特征在于,第一铁磁材料对于第一圆柱形转子的端部的周边均匀地施加磁性力。
8. 按照权利要求1所述的透镜筒,其特征在于,还包括:
第二透镜框架,用于支持第二透镜组;
第二电磁马达,包括第二圆柱形定子,以光学轴线作为中心轴线,和与第二圆柱形定子同轴并且相对于第二圆柱形定子围绕中心轴线旋转的第二圆柱形转子:
第二凸轮筒或旋转筒,用于将第二圆柱形转子的旋转运动转换成为直线运动而在平行于光学轴线的方向移动第二透镜框架和第二透镜组;和
圆柱形透镜体,与第一圆柱形转子和第二圆柱形转子同轴,其中
第一圆柱形转子包括呈圆柱形的第一转子磁铁,第二圆柱形转子包括呈圆柱形的第二转子磁铁,
圆柱形透镜体包括相对于第一转子磁铁边缘向内延伸的、构成第一铁磁材料的环状物,并用作由第一圆柱形定子和第二圆柱形定子共同使用的定子磁轭,并且
在定子磁轭中在相对于第一转子磁铁和第二转子磁铁的相邻端的位置上形成缺口。
9. 按照权利要求1所述的透镜筒,其特征在于,还包括:
第二透镜框架,用于支持第二透镜组;
第二电磁马达,包括第二圆柱形定子,以光学轴线作为中心轴线,和与第二圆柱形定子同轴并且相对于第二圆柱形定子围绕中心轴线旋转的第二圆柱形转子;
第二凸轮筒或旋转筒,用于将第二圆柱形转子的旋转运动转换成为直线运动而在平行于光学轴线的方向移动第二透镜框架和第二透镜组;和
第二铁磁材料,它相对于第二圆柱形转子的一端定位,用于对第二圆柱形转子在平行于光学轴线的方向施加磁性力。
10. 按照权利要求9所述的透镜筒,其特征在于,第一铁磁材料和第二铁磁材料各自对第一圆柱形转子和第二圆柱形转子在不同方向施加第一磁性力和第二磁性力。
11. 按照权利要求9所述的透镜筒,其特征在于,还包括
圆柱形透镜体,与第一圆柱形转子和第二圆柱形转子同轴,其中
圆柱形透镜体用作由第一圆柱形定子和第二圆柱形定子共同使用的定子磁轭。
12. 按照权利要求11所述的透镜筒,其特征在于,
第一圆柱形转子包括呈圆柱形的第一转子磁铁,第二圆柱形转子包括呈圆柱形的第二转子磁铁,并且在定子磁轭中相对于第一转子磁铁和第二转子磁铁的相邻端处形成缺口。
13. 按照权利要求12所述的透镜筒,其特征在于,缺口配置成为减少在定子磁轭和转子磁铁之间的磁通密度。
14. 按照权利要求9所述的透镜筒,其特征在于,
第一铁磁材料为第一推斥磁铁,
第二铁磁材料为第二推斥磁铁,和
第一推斥磁铁和第二推斥磁铁如此定向,使第一推斥磁铁和第二推斥磁铁极性相同的磁极互相面对。
15. 按照权利要求9所述的透镜筒,其特征在于,
第一铁磁材料对围绕光学轴线的第一圆柱形转子周边均匀地施加第一磁性力,而第二铁磁材料对围绕光学轴线的第二圆柱形转子周边均匀地施加第二磁性力。
16. 一种输出代表物体光学图像的电气图像信号的图像采集装置,包括:
图像采集光学系统,包括形成物体光学图像的第一透镜组;
图像采集传感器,用于接收由图像采集光学系统形成的光学图像和转换光学图像成为电气图像信号;和
透镜筒,用于支持第一透镜组,其中透镜筒包括:
第一透镜框架,用于支持第一透镜组;
第一电磁马达,包括第一圆柱形定子,以平行于光学轴线的轴线作为中心轴线,和与第一圆柱形定子同轴并且相对于第一圆柱形定子围绕中心轴线旋转的第一圆柱形转子,
第一凸轮筒或旋转筒,可操作地连接于第一透镜框架以便转换第一圆柱形转子的旋转运动成为直线运动,而在平行于光学轴线的方向移动第一透镜框架和第一透镜组;和
第一铁磁材料,它相对于第一圆柱形转子的一端定位,用于对第一圆柱形转子在平行于光学轴线的方向施加磁性力。
17. 按照权利要求16所述的图像采集装置,其特征在于,还包括:
转子磁铁,其相对于第一圆柱形转子如此定位,使得在第一铁磁材料和转子磁铁之间形成磁性吸引力。
18. 按照权利要求17所述的图像采集装置,其特征在于,第一圆柱形定子包括与第一圆柱形转子同轴的圆柱形定子磁轭,并且在圆柱形定子磁轭中在相对于转子磁铁边缘位置上形成缺口。
19. 按照权利要求18所述的图像采集装置,其特征在于,缺口配置成为减少在定子磁轭和转子磁铁之间的磁通密度。
20. 按照权利要求16所述的图像采集装置,其特征在于,第一透镜组为沿平行于光学轴线方向移动的缩放透镜组,用于执行图像采集光学系统的缩放。
21. 按照权利要求16所述的图像采集装置,其特征在于,第一透镜组为沿平行于光学轴线方向移动的聚焦透镜组,用于执行图像采集光学系统的聚焦。
22. 按照权利要求16所述的图像采集装置,其特征在于,
图像采集光学系统还包括用于形成物体光学图像的第二透镜组,
透镜筒用于夹持共同使用光学轴线的第一透镜组和第二透镜组,和
透镜筒还包括:
第二透镜框架,用于支持第二透镜组;
第二电磁马达,包括第二圆柱形定子,以光学轴线作为中心轴线,和与第二圆柱形定子同轴并且相对于第二圆柱形定子围绕中心轴线旋转的第二圆柱形转子,
第二凸轮筒或旋转筒,用于转换第二圆柱形转子的旋转运动成为直线运动,而在平行于光学轴线的方向移动第二透镜框架和第二透镜组,和
第二铁磁材料,它相对于第二圆柱形转子的一端定位,用于对第二圆柱形转子在平行于光学轴线的方向施加磁性力。
23. 按照权利要求22所述的图像采集装置,其特征在于,第一铁磁材料和第二铁磁材料各自对第一圆柱形转子和第二圆柱形转子在不同方向施加第一磁性力和第二磁性力。
24. 按照权利要求22所述的图像采集装置,其特征在于,
透镜筒为圆柱形透镜体,与第一圆柱形转子和第二圆柱形转子同轴,和
圆柱形透镜体用作由第一圆柱形定子和第二圆柱形定子共同使用的定子磁轭。
25. 按照权利要求24所述的图像采集装置,其特征在于,第一圆柱形转子包括呈圆柱形的第一转子磁铁,第二转子包括呈圆柱形的第二转子磁铁,并且在透镜筒中相对于第一转子磁铁和第二转子磁铁的相邻端处形成缺口。
26. 按照权利要求25所述的图像采集装置,其特征在于,缺口配置成为减少在定子磁轭和转子磁铁之间的磁通密度。
27. 按照权利要求22所述的图像采集装置,其特征在于,
第一铁磁材料为第一推斥磁铁,
第二铁磁材料为第二推斥磁铁,和
第一推斥磁铁和第二推斥磁铁如此定向,使第一推斥磁铁和第二推斥磁铁极性相同的磁极互相面对。
28. 按照权利要求22所述的图像采集装置,其特征在于,第一透镜组为沿平行于光学轴线方向移动的缩放透镜组,用于执行图像采集光学系统的缩放,和第二透镜组为沿平行于光学轴线方向移动的聚焦透镜组,用于执行图像采集光学系统的聚焦。
29. 一种夹持至少一个透镜组的透镜筒,包括:
第一透镜框架,用于支持第一透镜组;
第一电磁马达,包括第一圆柱形定子,以平行于光学轴线的轴线作为中心轴线,和与第一圆柱形定子同轴并且相对于第一圆柱形定子围绕中心轴线旋转的第一圆柱形转子,
第一转换装置,用于转换第一圆柱形转子的旋转运动成为直线运动,而在平行于光学轴线的方向移动第一透镜框架和第一透镜组;和
第一施力装置,用于对第一圆柱形转子在平行于光学轴线的方向施加力。
30. 按照权利要求29所述的透镜筒,其特征在于,还包括
转子磁铁,其相对于第一圆柱形转子如此定位,使得在第一施力装置和转子磁铁之间形成磁性吸引力。
31. 按照权利要求30所述的透镜筒,其特征在于,第一施力装置为铁磁板。
32. 按照权利要求31所述的透镜筒,其特征在于,
转子磁铁为圆柱形,并且
构成第一施力装置的铁磁板为环形。
33. 按照权利要求30所述的透镜筒,其特征在于,第一圆柱形定子包括与转子同轴的圆柱形定子磁轭,并且圆柱形定子磁轭包括相对于转子磁铁边缘向内延伸的、构成第一施力装置的环状物。
34. 按照权利要求30所述的透镜筒,其特征在于,第一圆柱形定子包括与第一圆柱形转子同轴的圆柱形定子磁轭,并且在圆柱形定子磁轭中在相对于转子磁铁边缘位置上形成缺口。
35. 按照权利要求29所述的透镜筒,其特征在于,第一施力装置对于第一圆柱形转子的端部的周边均匀地施加磁性力。
36. 按照权利要求29所述的透镜筒,其特征在于,还包括:
第二透镜框架,用于支持第二透镜组;
第二电磁马达,包括第二圆柱形定子,以光学轴线作为中心轴线,和与第二圆柱形定子同轴并且相对于第二圆柱形定子围绕中心轴线旋转的第二圆柱形转子;
第二转换装置,用于将第二圆柱形转子的旋转运动转换成为直线运动而在平行于光学轴线的方向移动第二透镜框架和第二透镜组;和
圆柱形透镜体,与第一圆柱形转子和第二圆柱形转子同轴,其中
第一圆柱形转子包括呈圆柱形的第一转子磁铁,第二圆柱形转子包括呈圆柱形的第二转子磁铁,
圆柱形透镜体包括相对于第一转子磁铁边缘向内延伸的、构成第一施力装置的环状物,并用作由第一圆柱形定子和第二圆柱形定子共同使用的定子磁轭,并且
在定子磁轭中在相对于第一转子磁铁和第二转子磁铁的相邻端的位置上形成缺口。
37. 按照权利要求29所述的透镜筒,其特征在于,还包括:
第二透镜框架,用于支持第二透镜组;
第二电磁马达,包括第二圆柱形定子,以光学轴线作为中心轴线,和与第二圆柱形定子同轴并且相对于第二圆柱形定子围绕中心轴线旋转的第二圆柱形转子,
第二转换装置,用于转换第二圆柱形转子的旋转运动成为直线运动而在平行于光学轴线的方向移动第二透镜框架和第二透镜组;和
第二施力装置,用于对第二圆柱形转子在平行于光学轴线的方向施加力。
38. 按照权利要求37所述的透镜筒,其特征在于,第一施力装置和第二施力装置各自对第一圆柱形转子和第二圆柱形转子在不同方向施加第一力和第二力。
39. 按照权利要求37所述的透镜筒,其特征在于,还包括:圆柱形透镜体,与第一圆柱形转子和第二圆柱形转子同轴,其中圆柱形透镜体用作由第一圆柱形定子和第二圆柱形定子共同使用的定子磁轭。
40. 按照权利要求39所述的透镜筒,其特征在于,第一圆柱形转子包括第一圆柱形转子磁铁,第二圆柱形转子包括第二圆柱形转子磁铁,并且在定子磁轭中相对于第一转子磁铁和第二转子磁铁的相邻端处形成缺口。
41. 按照权利要求40所述的透镜筒,其特征在于,缺口配置成为减少在定子磁轭和转子磁铁之间的磁通密度。
42. 按照权利要求37所述的透镜筒,其特征在于,
第一施力装置为第一推斥磁铁,
第二施力装置为第二推斥磁铁,和
第一推斥磁铁和第二推斥磁铁如此定向,使第一推斥磁铁和第二推斥磁铁极性相同的磁极互相面对。
43. 按照权利要求37所述的透镜筒,其特征在于,第一施力装置对围绕光学轴线的第一圆柱形转子周边均匀地施加第一磁性力,而第二施力装置对围绕光学轴线的第二圆柱形转子周边均匀地施加第二磁性力。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004029571A JP4739681B2 (ja) | 2004-02-05 | 2004-02-05 | 鏡筒 |
| JP2004029571 | 2004-02-05 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1651959A CN1651959A (zh) | 2005-08-10 |
| CN100416328C true CN100416328C (zh) | 2008-09-03 |
Family
ID=34824091
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB2004100858860A Expired - Fee Related CN100416328C (zh) | 2004-02-05 | 2004-11-05 | 透镜筒和包括透镜筒的图像采集装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7061700B2 (zh) |
| JP (1) | JP4739681B2 (zh) |
| CN (1) | CN100416328C (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7639306B2 (en) | 2005-11-18 | 2009-12-29 | Hon Hai Precision Industry Co., Ltd. | Digital camera module with zoom function and focusing function |
| US11067769B2 (en) | 2018-02-16 | 2021-07-20 | Canon Kabushiki Kaisha | Lens barrel and image capturing apparatus |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100681589B1 (ko) * | 2004-02-18 | 2007-02-09 | 가부시끼가이샤시코기껜 | 렌즈 구동장치 |
| JP4649293B2 (ja) * | 2005-08-23 | 2011-03-09 | オリンパスイメージング株式会社 | レンズ駆動装置 |
| CN1967307B (zh) * | 2005-11-18 | 2011-06-08 | 鸿富锦精密工业(深圳)有限公司 | 镜头变焦与对焦结构及应用该结构的数码相机模组 |
| TWM310356U (en) * | 2006-08-23 | 2007-04-21 | Lite On Technology Corp | Optical device |
| JP5030263B2 (ja) * | 2006-11-13 | 2012-09-19 | オリンパスイメージング株式会社 | ズームレンズ |
| US7990463B2 (en) * | 2008-02-05 | 2011-08-02 | Power Gate Optical Inc | Multi-stage lens driving device |
| JP5408542B2 (ja) * | 2009-04-10 | 2014-02-05 | 株式会社リコー | レンズ駆動装置、カメラおよび携帯情報端末装置 |
| US9217841B2 (en) * | 2011-01-25 | 2015-12-22 | Hong Kong Applied Science & Technology Research Institute Company, Limited | Compact camera module with zoom and auto-focus actuators sharing the same rotating annular magnet with alternating thick and thin poles |
| JP5535404B2 (ja) * | 2011-12-27 | 2014-07-02 | パナソニック株式会社 | 撮像装置 |
| DE102014108969A1 (de) * | 2013-11-24 | 2015-05-28 | Leica Camera Ag | Motorischer Verstellantrieb für Objektive |
| CN104765123A (zh) * | 2014-01-08 | 2015-07-08 | 博立码杰通讯(深圳)有限公司 | 变焦镜头驱动装置和变焦镜头 |
| JP6412780B2 (ja) * | 2014-11-21 | 2018-10-24 | オリンパス株式会社 | レンズ鏡筒 |
| KR102399590B1 (ko) * | 2015-02-04 | 2022-05-19 | 삼성전자주식회사 | 렌즈 구동 모듈 |
| US20160341975A1 (en) | 2015-05-21 | 2016-11-24 | Jahwa Electronics Co., Ltd. | Camera lens module |
| CN106291861B (zh) * | 2015-05-29 | 2019-08-20 | 磁化电子株式会社 | 相机透镜模块 |
| CN106154481A (zh) * | 2016-08-26 | 2016-11-23 | 福建福光股份有限公司 | 一种模具镜头及其装配工艺 |
| KR102185060B1 (ko) | 2018-07-20 | 2020-12-01 | 삼성전기주식회사 | 카메라 모듈 |
| US11102387B2 (en) | 2018-10-26 | 2021-08-24 | Samsung Electro-Mechanics Co., Ltd. | Camera module including multiple lens barrels |
| CN111338048B (zh) | 2020-05-18 | 2020-09-01 | 昆山联滔电子有限公司 | 一种镜头推动装置 |
| CN114384661B (zh) * | 2020-10-02 | 2024-05-17 | 日本电产三协株式会社 | 光学单元 |
| CN113777741B (zh) * | 2021-09-04 | 2024-05-14 | 新思考电机有限公司 | 连续变焦驱动磁轭组、组装方法、透镜驱动装置及摄像装置 |
| CN113777739B (zh) * | 2021-09-04 | 2023-12-22 | 新思考电机有限公司 | 透镜驱动镜筒和壳体连接机构、透镜驱动装置及摄像装置 |
| CN113504624B (zh) * | 2021-09-04 | 2021-12-17 | 新思考电机有限公司 | 透镜驱动装置镜筒伸缩驱动系统、透镜驱动装置及摄像装置 |
| WO2023213372A1 (en) * | 2022-05-02 | 2023-11-09 | Huawei Technologies Co., Ltd. | Optical system for electronic apparatus |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4828360A (en) * | 1986-08-02 | 1989-05-09 | Sony Corporation | Drive motor for camera lens assembly |
| CN1090395A (zh) * | 1992-11-10 | 1994-08-03 | 三星航空产业株式会社 | 电磁驱动快门装置 |
| JP2000131586A (ja) * | 1998-10-29 | 2000-05-12 | Toshiba Corp | 電磁モータ内蔵カメラ装置 |
| JP2000284167A (ja) * | 1999-04-01 | 2000-10-13 | Nidec Copal Corp | 羽根駆動機構を備えたレンズ駆動機構 |
| CN2411496Y (zh) * | 2000-01-25 | 2000-12-20 | 雷培智 | 可伸缩镜头自动照相机的齿轮定位装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60146207A (ja) | 1984-01-10 | 1985-08-01 | Canon Inc | ステップ駆動とブラシレス駆動を切換え可能なモーター制御装置 |
| JP2751151B2 (ja) | 1986-05-15 | 1998-05-18 | ソニー株式会社 | カメラの合焦点装置 |
| JPS63163807A (ja) * | 1986-12-26 | 1988-07-07 | Copal Electron Co Ltd | レンズ自動焦点調整用モ−タ |
| JPH0429108A (ja) * | 1990-05-24 | 1992-01-31 | Nippon Mini Motor Kk | カメラレンズの調整機構 |
| JPH04113340A (ja) * | 1990-09-03 | 1992-04-14 | Copal Co Ltd | レンズ駆動機構付きシャッター |
| JPH05196850A (ja) | 1992-01-17 | 1993-08-06 | Canon Inc | レンズ駆動装置 |
| JP3232517B2 (ja) * | 1993-02-25 | 2001-11-26 | 富士写真フイルム株式会社 | レンズ鏡胴 |
| JP3827260B2 (ja) * | 1996-09-04 | 2006-09-27 | 富士写真フイルム株式会社 | ズームレンズ装置 |
| JP2000193875A (ja) * | 1998-12-28 | 2000-07-14 | Canon Inc | レンズ鏡筒及び該レンズ鏡筒を有する光学機器 |
| JP2005227738A (ja) * | 2004-01-13 | 2005-08-25 | Sankyo Seiki Mfg Co Ltd | レンズ駆動装置、およびレンズ駆動装置の製造方法 |
-
2004
- 2004-02-05 JP JP2004029571A patent/JP4739681B2/ja not_active Expired - Fee Related
- 2004-10-14 US US10/963,588 patent/US7061700B2/en not_active Expired - Fee Related
- 2004-11-05 CN CNB2004100858860A patent/CN100416328C/zh not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4828360A (en) * | 1986-08-02 | 1989-05-09 | Sony Corporation | Drive motor for camera lens assembly |
| CN1090395A (zh) * | 1992-11-10 | 1994-08-03 | 三星航空产业株式会社 | 电磁驱动快门装置 |
| JP2000131586A (ja) * | 1998-10-29 | 2000-05-12 | Toshiba Corp | 電磁モータ内蔵カメラ装置 |
| JP2000284167A (ja) * | 1999-04-01 | 2000-10-13 | Nidec Copal Corp | 羽根駆動機構を備えたレンズ駆動機構 |
| CN2411496Y (zh) * | 2000-01-25 | 2000-12-20 | 雷培智 | 可伸缩镜头自动照相机的齿轮定位装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7639306B2 (en) | 2005-11-18 | 2009-12-29 | Hon Hai Precision Industry Co., Ltd. | Digital camera module with zoom function and focusing function |
| US11067769B2 (en) | 2018-02-16 | 2021-07-20 | Canon Kabushiki Kaisha | Lens barrel and image capturing apparatus |
| CN110161647B (zh) * | 2018-02-16 | 2022-04-26 | 佳能株式会社 | 透镜镜筒和摄像装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20050174657A1 (en) | 2005-08-11 |
| JP2005221770A (ja) | 2005-08-18 |
| US7061700B2 (en) | 2006-06-13 |
| JP4739681B2 (ja) | 2011-08-03 |
| CN1651959A (zh) | 2005-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100416328C (zh) | 透镜筒和包括透镜筒的图像采集装置 | |
| US11156898B2 (en) | Aperture module, camera module, and portable electronic device | |
| US7777969B2 (en) | Camera module and portable terminal employing the same | |
| US7359631B2 (en) | Lens driving device, imaging device using the same, and small-sized electronics device using the same | |
| EP1871096B1 (en) | Positioning device, shake correcting device and electronics | |
| US4534624A (en) | Construction of lens barrel operated by electromagnetic induction | |
| TWI410023B (zh) | 步進馬達及電子機器(一) | |
| US9217841B2 (en) | Compact camera module with zoom and auto-focus actuators sharing the same rotating annular magnet with alternating thick and thin poles | |
| JP2011081426A (ja) | 鏡筒ならびに鏡筒を備えた撮像装置 | |
| TW200818667A (en) | Stepping motor and electronic apparatus | |
| US7663825B2 (en) | Lens barrel device and image capture device | |
| US7414801B2 (en) | Lens barrel and image pickup device including lens barrel | |
| KR102399590B1 (ko) | 렌즈 구동 모듈 | |
| US7440689B2 (en) | Electromagnetically actuated adjusting apparatus for lens | |
| US8084899B2 (en) | Driving apparatus | |
| US7274120B2 (en) | Drive unit and image pickup unit equipped with the drive unit | |
| CN101354517A (zh) | Xy机架及拍摄装置 | |
| US7941043B2 (en) | Automatic focal point control for camera | |
| KR101158222B1 (ko) | 렌즈 구동 모듈 | |
| WO2023005650A1 (zh) | 转动机构及其摄像模组、驱动装置及其电子设备 | |
| JP4751639B2 (ja) | 鏡筒、鏡筒を備える撮像装置 | |
| CN103891104B (zh) | 光圈装置、驱动马达及摄像机 | |
| JP5047459B2 (ja) | 光量調節装置、撮像光学ユニットおよび撮像装置 | |
| JP2006129653A (ja) | 電磁モータならびに電磁モータを備えたレンズ鏡筒および撮像装置 | |
| CN115695953A (zh) | 驱动装置及其电子设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20080903 Termination date: 20131105 |