BR112014018394B1 - Configuração de trator e trator agrícola - Google Patents
Configuração de trator e trator agrícola Download PDFInfo
- Publication number
- BR112014018394B1 BR112014018394B1 BR112014018394-5A BR112014018394A BR112014018394B1 BR 112014018394 B1 BR112014018394 B1 BR 112014018394B1 BR 112014018394 A BR112014018394 A BR 112014018394A BR 112014018394 B1 BR112014018394 B1 BR 112014018394B1
- Authority
- BR
- Brazil
- Prior art keywords
- track
- tractor
- wheel
- weight
- load
- Prior art date
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 37
- 230000000712 assembly Effects 0.000 claims abstract description 28
- 238000000429 assembly Methods 0.000 claims abstract description 28
- 238000012546 transfer Methods 0.000 claims abstract description 6
- 239000000725 suspension Substances 0.000 claims description 48
- 238000000034 method Methods 0.000 claims description 9
- 230000008569 process Effects 0.000 claims description 6
- 239000003381 stabilizer Substances 0.000 claims description 2
- 238000005096 rolling process Methods 0.000 claims 1
- 239000000446 fuel Substances 0.000 description 11
- 238000009826 distribution Methods 0.000 description 9
- 230000005484 gravity Effects 0.000 description 8
- 239000002689 soil Substances 0.000 description 7
- 230000006870 function Effects 0.000 description 6
- 230000033001 locomotion Effects 0.000 description 6
- 230000009467 reduction Effects 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 230000035515 penetration Effects 0.000 description 5
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 4
- 229910000831 Steel Inorganic materials 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 4
- 230000006378 damage Effects 0.000 description 4
- 230000002787 reinforcement Effects 0.000 description 4
- 239000010959 steel Substances 0.000 description 4
- 238000003971 tillage Methods 0.000 description 4
- 238000013459 approach Methods 0.000 description 3
- 238000012937 correction Methods 0.000 description 3
- 230000002829 reductive effect Effects 0.000 description 3
- 230000007704 transition Effects 0.000 description 3
- 208000027418 Wounds and injury Diseases 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000003466 anti-cipated effect Effects 0.000 description 2
- 238000005056 compaction Methods 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 125000004122 cyclic group Chemical group 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 229910052757 nitrogen Inorganic materials 0.000 description 2
- 230000010355 oscillation Effects 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 210000000078 claw Anatomy 0.000 description 1
- 230000001010 compromised effect Effects 0.000 description 1
- 230000036461 convulsion Effects 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000003628 erosive effect Effects 0.000 description 1
- 239000002828 fuel tank Substances 0.000 description 1
- 239000007789 gas Substances 0.000 description 1
- 230000002401 inhibitory effect Effects 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000005055 memory storage Effects 0.000 description 1
- 230000036961 partial effect Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 230000000153 supplemental effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
- 230000004584 weight gain Effects 0.000 description 1
- 235000019786 weight gain Nutrition 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D49/00—Tractors
- B62D49/06—Tractors adapted for multi-purpose use
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/02—Endless track vehicles with tracks and additional ground wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D11/00—Steering non-deflectable wheels; Steering endless tracks or the like
- B62D11/02—Steering non-deflectable wheels; Steering endless tracks or the like by differentially driving ground-engaging elements on opposite vehicle sides
- B62D11/06—Steering non-deflectable wheels; Steering endless tracks or the like by differentially driving ground-engaging elements on opposite vehicle sides by means of a single main power source
- B62D11/10—Steering non-deflectable wheels; Steering endless tracks or the like by differentially driving ground-engaging elements on opposite vehicle sides by means of a single main power source using gearings with differential power outputs on opposite sides, e.g. twin-differential or epicyclic gears
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D11/00—Steering non-deflectable wheels; Steering endless tracks or the like
- B62D11/24—Endless track steering specially adapted for vehicles having both steerable wheels and endless track
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D29/00—Superstructures, understructures, or sub-units thereof, characterised by the material thereof
- B62D29/008—Superstructures, understructures, or sub-units thereof, characterised by the material thereof predominantly of light alloys, e.g. extruded
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D37/00—Stabilising vehicle bodies without controlling suspension arrangements
- B62D37/04—Stabilising vehicle bodies without controlling suspension arrangements by means of movable masses
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D49/00—Tractors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D49/00—Tractors
- B62D49/06—Tractors adapted for multi-purpose use
- B62D49/0621—Tractors adapted for multi-purpose use comprising traction increasing arrangements, e.g. all-wheel traction devices, multiple-axle traction arrangements, auxiliary traction increasing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D49/00—Tractors
- B62D49/06—Tractors adapted for multi-purpose use
- B62D49/0621—Tractors adapted for multi-purpose use comprising traction increasing arrangements, e.g. all-wheel traction devices, multiple-axle traction arrangements, auxiliary traction increasing devices
- B62D49/0635—Tractors adapted for multi-purpose use comprising traction increasing arrangements, e.g. all-wheel traction devices, multiple-axle traction arrangements, auxiliary traction increasing devices using additional ground engaging means, e.g. endless tracks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/08—Endless track units; Parts thereof
- B62D55/104—Suspension devices for wheels, rollers, bogies or frames
- B62D55/116—Attitude or position control of chassis by action on suspension, e.g. to compensate for a slope
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Architecture (AREA)
- Structural Engineering (AREA)
- Vehicle Body Suspensions (AREA)
- Non-Deflectable Wheels, Steering Of Trailers, Or Other Steering (AREA)
Abstract
configuração aprimorada de trator de duas esteiras. a presente invenção refere-se a uma configuração de trator que inclui uma estrutura principal, uma estação de controle que tem um meio de controle do trator, um sistema de trem de rolamento que tem uma montagem de esteira de lado esquerdo e uma de lado direito, um mecanismo de roda que contém uma ou mais rodas localizadas na frente das montagens de esteira, um trem de potência para forçar ambas as montagens de esteira a se deslocarem na mesma ou em velocidades diferentes, um controlador responsável por aplicar força para transferir carga vertical para trás e para frente entre a porção frontal das montagens de esteira e o mecanismo de roda e controlar a quantidade de peso transportada pelo mecanismo de roda. o controlador faz com que ou permite que a roda ou as rodas do mecanismo de roda sigam a trajetória curvada do trator causada pela diferença de velocidade de esteira.
Description
[001] Este pedido reivindica prioridade do Pedido de PatenteProvisório de n° U.S. 60/590.990 depositado em 26 de Janeiro de 2012.
[002] A presente invenção refere-se, em geral, a um aparelhopara um trator que tem duas esteiras. Mais especificamente, o aparelho é uma configuração aprimorada para um trator que tem duas montagens de esteira e uma montagem de roda na parte frontal das montagens de esteira, cuja montagem de roda é automaticamente controlada para ajustar uma quantidade de peso na montagem de roda, por exemplo, para limitar ou eliminar o deslizamento e, assim, uma quantidade de desgaste nas barras de banda de rodagem das montagens de esteira. Tal aparelho assim resolve múltiplos problemas encontrados com os atuais tratores de duas esteiras com o uso de duas esteiras de correia de borracha.
[003] Tanto uma configuração de trator de duas esteiras quantouma configuração de trator de meia-esteira são conhecidas. Os grandes tratores de fazenda mais novos frequentemente usavam configurações de meia-esteira que têm uma combinação de esteiras de aço e rodas. Para tração, esteiras foram escolhidas devido ao fato de que as mesmas forneceram melhores características de desempenho do que as rodas. Para mobilidade em terreno macio, as esteiras eram melhores do que as rodas.
[004] O propósito original principal do mecanismo de roda naparte frontal era de conduzir o trator. Esteiras tiveram características satisfatórias para trabalho de campo. No entanto, de modo a conduzir, uma porcentagem significativa do peso total teve de ser transportada no mecanismo frontal de roda. Isso fez com que o trator fosse muito pesado. O afundamento parcial do mecanismo frontal de roda comprometeu a mobilidade do trator convencional em terreno macio. Posteriormente, foi desenvolvido um sistema de condução que consistia em criar uma diferença de velocidade de esteira entre as duas esteiras. Esse sistema de diferença de velocidade trabalhou de forma satisfatória para condução e permitiu que o mecanismo frontal de roda fosse removido. A remoção do mecanismo frontal de roda permitiu que todo o peso do trator fosse usado para fins de tração e para aprimoramentos de mobilidade em terreno macio.
[005] As esteiras de aço com pontas de garra afiadas têm umadesvantagem de não ter capacidade de se deslocarem em estradas pavimentadas devido ao fato de que as mesmas tendem a danificar a superfície da estrada e devido ao fato às velocidades lentas de percurso. Com o advento de estradas pavimentadas e campos dos fazendeiros se distânciando, o uso de esteiras de aço se tornou desfavorável. A configuração preferencial de trator se tornou a roda trator com o uso somente de pneus. Para tratores que são usados primeiramente para puxar cargas pesadas, é preferencial que todas as rodas fossem alimentadas de modo que todo o peso pode contribuir para forças de barra de engate. Os dois sistemas principais de condução que são atualmente usados por tratores de roda são condução Ackerman para pequenos tratores e condução articulada para grandes tratores.
[006] Em torno de 1985, foi disponibilizado um trator de esteirade duas esteiras que usava esteiras de correia de borracha, conforme distinguido das esteiras de aço. Esse trator de esteira com esteiras de correia de borracha poderia agora se deslocar na estrada sem danificar a estrada e também se deslocar em maiores velocidades tanto no campo quanto na estrada. Um sistema de condução avançado, conhecido na técnica coma condução diferencial, foi adicionalmente desenvolvido e usado nesse trator de esteira de duas esteiras.
[007] Atualmente, há duas diferentes configurações de trator Agde correia de borracha disponíveis no mercado. Uma configuração tem duas esteiras e a outra configuração tem quatro esteiras.
[008] As dinâmicas da configuração de duas esteiras incluem oseguinte: a configuração padrão de duas esteiras tem uma viagem difícil de estado estacionário durante o percurso na estrada devido ao fato de que a quantidade de peso no fuso frontal da montagem de esteira é excessiva durante o percurso na estrada e devido ao fato de que a parte traseira do trator não tem suspensão. Essa quantidade excessiva de aumento de peso na parte frontal também causa desgaste rápido das correias de borracha.
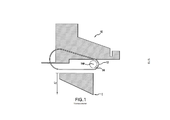
[009] O processo que causa desgaste rápido envolve omovimento da porção da correia de borracha que é enrolada ao redor da mesma e atravessa a roda do fuso frontal (consulte a Figura 1). Essa roda é localizada dentro da correia, na parte frontal da correia, e é denominada como a polia frontal. Essa porção das pontas da barra da banda de rodagem, ao se deslocar tangencialmente ao redor da polia frontal, se desloca mais rápido em relação a uma velocidade de linha de base do que quando tal porção se desloca nas porções retas da correia. A velocidade de linha de base é aqui definida como a velocidade do pacote de reforço inextensível da correia. Esse percurso mais rápido ao redor da polia acontece devido ao fato de que as pontas de barra de banda de rodagem, ao se deslocarem em um arco ao redor da polia frontal, são em um raio maior do que é o raio do pacote de reforço da correia, medido a partir do centro rotacional da polia frontal.
[0010] Essa razão de velocidade das pontas da barra da banda de rodagem ao pacote de reforço é a razão direta desses dois raios. Ou seja, em referência ao pacote de reforço inextensível da correia como sendo a velocidade do veículo, a porção das pontas de barra de banda de rodagem que se deslocam tangencialmente ao redor da polia frontal se move mais rápido do que a velocidade do veículo. Por esse motivo, é geralmente sabido por aqueles versados na técnica que quando barras de banda de rodagem de pneu ou barras de banda de rodagem de correia se deslocam em uma velocidade diferente da velocidade do veículo, o fenômeno "deslizamento" ocorre. O deslizamento causa desgaste nas pontas de barra de banda de rodagem e a taxa de desgaste é proporcional à força de contato entre a ponta e o solo.
[0011] O processo que causa desgaste rápido das barras debanda de rodagem é especificamente relacionada aos eventos que acontecem diretamente abaixo e ligeiramente à frente da linha central da polia frontal, em um ponto em que as pontas de barra de banda de rodagem começam a engatar no solo, isto é, transitam de um estado descarregado a um estado carregado.
[0012] Conforme retratado na Figura 1, quando a configuração detrator padrão de duas esteiras (somente a esteira direita 12 é mostrada na Figura 1) se desloca na estrada, a carga na polia frontal 14 é excessiva, conforme indicada pela carga (L) conforme uma função de posicionamento ao longo do comprimento das esteiras em relação à direção de percurso. Evidentemente, a carga na posição "I" da esteira, diretamente sob a linha central de eixo de polia 14A (que é coincidente com o fulcro de tombamento), é onde a carga máxima ou peso é realizada. Essa carga excessiva causa compressão excessiva nas barras de banda de rodagem abaixo da linha central da polia frontal 14A. Essa compressão, por sua vez, faz com que o ponto de contato inicial das barras de banda de rodagem aconteça diversos centímetros adiante da linha central da polia.
[0013] Conforme descrito acima, as pontas da barra da banda derodagem entram em contato com o solo com deslizamento. O deslizamento continua desde que a correia esteja em uma condição de ser enrolada ao redor da polia frontal. Durante os diversos centímetros de deslizamento, a força de contato entre a ponta da barra da banda de rodagem e o solo aumenta de zero ao valor máximo (em 'I" conforme mostrado na Figura 1). O resultado é uma taxa rápida de desgaste na ponta da barra da banda de rodagem nesse local (isto é, próximo à polia frontal 14) quando a ponta da barra da banda de rodagem transita de um estado descarregado a um estado carregado.
[0014] A viagem difícil denominada acima resulta dessa transiçãodas pontas da barra da banda de rodagem de uma condição não carregada a uma condição de carga excessiva em combinação com o grande espaçamento das barras de banda de rodagem, isto é, em torno de 8 polegadas ou 200 mm. Isto é, o espaçamento traseiro e dianteiro entre as barras de banda de rodagem da correia. Isso cria um efeito de viagem similar ao criado por bandas sonoras em uma autoestrada. Essa situação dinâmica translada na necessidade de substituir frequentemente correias de esteiras de borracha custosas.
[0015] Sabe-se também que tratores tendem a transferir cargavertical de seu meio de suporte frontal e em seu meio de suporte posterior ao puxar uma carga de barra de tração. O puxamento de barra de tração gera um momento de arfagem que é aproximadamente igual à quantidade de puxamento de barra de tração multiplicada pela altura de barra de tração. A transferência de carga vertical é a reação ao momento de arfagem. Para a configuração padrão de duas esteiras, o puxamento de barra de tração transfere a carga vertical da parte frontal das montagens de esteira e à parte traseira das montagens de esteira.
[0016] Para que as esteiras de correia de borracha tenham suamelhor eficiência de tração e melhores características de flutuação, é necessário ter o peso do trator igualmente distribuído sob as montagens de esteira; frontal à posterior. A configuração padrão de duas esteiras usa tipicamente contrapesos na parte frontal da estrutura central do trator que se destinam a concluir um perfil de peso igualmente distribuído sob as montagens de esteira, frontal à posterior, durante o trabalho de campo que encontra normalmente grandes quantidades de puxamento de barra de tração. Essa situação é denominada como sendo apropriadamente equilibrada para o trabalho de campo.
[0017] Quando o equilíbrio do trator é desviado por uma grandequantidade de puxamento de barra de tração no campo, então o mesmo é inapropriadamente equilibrado ao se deslocar na estrada em que pequenas quantidades de puxamento de barra de tração são a norma, conforme mostrado na Figura 1. Exceções à norma incluem rebocar pesados vagões para cima em graus íngremes. A situação normal, ao se deslocar na estrada, é que cada polia frontal da montagem de esteira transporte uma grande porcentagem do peso do veículo.
[0018] Durante determinadas operações no campo, a quantidadede puxamento de barra de tração tende a variar à medida que o trator atravessa o campo. Isso, por sua vez, faz com que a distribuição de peso sob as esteiras varie na proporção de variação de puxamento de barra de tração À medida que a configuração de trator de duas esteiras atravessa o campo. A distribuição não uniforme de peso sob as esteiras aumenta o consumo de combustível, aumenta o deslizamento de esteira, aumenta desgaste de esteira, e aumenta a compactação do solo.
[0019] Para as características de tração satisfatórias no campo, é desejável usar um padrão agressivo de barra de banda de rodagem, tal como um padrão chevron, na correia e para separar as barras de banda de rodagem em torno de 200 mm (8 polegadas). Ao se deslocar na estrada, esse grande espaçamento da barra de banda de rodagem, em combinação com a carga pesada em cada polia frontal da montagem de esteira, é a fonte de uma vibração perturbadora e contínua para o operador tolerar: como uma banda sonora contínua.
[0020] Outra situação que ocorre durante operações de camposão as arfagens de configuração padrão de trator de duas esteiras severamente sob determinadas condições tais como percurso em ângulos direitos em uma crista. O movimento de arfagem pode fazer com que o operador experimente desconforto, lesões, ou perca controle do trator.
[0021] A configuração padrão de trator de duas esteiras não ésuspensa no eixo traseiro. Isso também contribui para o desconforto do operador e alto estresse dentro da estrutura do trator.
[0022] Durante uma manobra de condução, a configuração padrãode trator de duas esteiras frequentemente encontra uma ação de frenagem na montagem de esteira que está no interior do raio de giro. Isso ocorre devido ao fato de que uma força de frenagem de esteira interna é frequentemente necessária para superar as forças de tração lateral. Outras situações existem quando ambas as montagens de esteira experimentam ações de frenagem e quando as forças precisam ser irregulares de lado a lado para fins de condução, por exemplo, quando um trator é impulsionado por um vagão pesado ao descer a um grau íngreme e capacidade de frenagem máxima é necessária de modo a manter a velocidade máxima permitida do operador.
[0023] Se uma correção de condução for necessária e, devido aofato de que a esteira interior do raio de giro de correção de condução é em seu limite de frenagem, a esteira no exterior do raio de giro precisa então liberar parte de sua força de frenagem de modo a realizar uma correção de condução. O resultado final é a velocidade da linha central do trator e dos aumentos de vagão. Os freios então não têm capacidade de desacelerar o trator e vagão de volta à velocidade máxima permitida do operador.
[0024] Outro possível resultado causado pela impulsão do vagãodo trator é um momento de arfagem adiante resultante que aumenta adicionalmente a carga vertical na parte frontal das montagens de esteira e diminui a carga na parte traseira. A amplitude de arfagem adiante resultante aumenta a altura da barra de tração e, por sua vez, lança a lingueta do vagão para trás, impondo um dobramento para cima entre a barra de tração do trator e a lingueta do vagão de forma mais apropriada.
[0025] A presente invenção fornece uma montagem de trator deduas esteiras e trator que inclui o mesmo que supera as desvantagens das técnicas conhecidas.
[0026] Em uma modalidade, a invenção fornece o aparelho paraum trator que tem duas montagens de esteira de borracha e uma montagem de roda na parte frontal das montagens de esteira que controla automaticamente a quantidade de peso na montagem de roda, por exemplo, para limitar ou eliminar o deslizamento e, assim, uma quantidade de desgaste nas barras de banda de rodagem das montagens de esteira.
[0027] O aparelho inventivo resolve um número de problemasencontrado com as configurações de trator de duas esteiras convencionais com o uso de esteiras de correia de borracha. Ou seja, a invenção aprimora a viagem difícil encontrada pelo operador durante o percurso na estrada em um trator de duas esteiras convencional, retarda o desgaste rápido das barras de banda de rodagem da correia normalmente encontradas durante o percurso na estrada em um trator de duas esteiras convencional, alivia a distribuição não uniforme de pesos sob as montagens de esteira normalmente encontradas em um trator de duas esteiras convencional, alivia a arfagem severa ocasional e seu desconforto ao operador, que pode ser normalmente encontrado durante o percurso na estrada em um trator de duas esteiras convencional, considera desfavorável o local do centro de gravidade sem contrapesos em um trator de duas esteiras convencional, alivia determinadas situações desfavoráveis em relação ao controle de veículo que pode ocorrer em um trator de duas esteiras convencional, supera problemas associados à condução suplementar em tratores de duas esteiras convencionais; obvia uma necessidade para suspensão na parte traseira do trator, conforme exigido em um trator de duas esteiras convencional; supera o problema de implementos frontais montados excessivamente em cantiléver, que é tipicamente constatado em tratores de duas esteiras de técnica anterior e minimiza perturbações no solo ao girar, conforme comparado a tratores de duas esteiras conhecidos.
[0028] Uma configuração de trator inclui uma estrutura principal,uma estação de controle que tem um meio de controle do trator, um sistema de trem de rolamento que tem um lado esquerdo e uma montagem de esteira de lado direito, um mecanismo de roda que contém uma ou mais rodas localizadas a frente das montagens de esteira, um trem de potência para forçar ambas as montagens de esteira a se deslocarem na mesma ou em velocidades diferentes, um controlador responsável por aplicar força para transferir carga vertical para trás e para frente entre a porção frontal das montagens de esteira e o mecanismo de roda e controlar a quantidade de peso transportada pelo mecanismo de roda. O controlador faz com que ou permite que a roda ou rodas do mecanismo de roda sigam a trajetória curvada do trator causada pela diferença de velocidade de esteira.
[0029] Preferencialmente, a suspensão de eixo frontalcompreende uma suspensão ativa.
[0030] Em outra modalidade, a invenção fornece um trator agrícolacom um par de montagens de esteira que inclui bandas de rodagem de borracha com barras estabilizadoras, as montagens de esteira interconectadas pelos respectivos eixos frontal e traseiro se estendem substancialmente perpendicular a uma direção de percurso, uma montagem de roda frontal e um controlador ou um sistema de controle que controla automaticamente uma carga imposta na montagem de roda frontal de modo a controlar a carga imposta no eixo frontal das montagens de esteira para minimizar desgaste de banda de rodagem de borracha.
[0031] Preferencialmente, o controlador controla a geometria deângulo de giro para manter o alinhamento correto para um giro de articulação, controla a carga ao transportar um implemento frontal montado e incorpora um microprocessador que executa um conjunto de instruções de computador, armazenadas em uma memória de computador, ou outro dispositivo de armazenamento de memória ou estrutura, que, quando executadas, realizam o equilíbrio para minimizar o desgaste de banda de rodagem.
[0032] Aspectos da tecnologia revelada se tornarão evidentesmediante leitura da descrição detalhada a seguir e mediante referência aos desenhos anexos nos quais, as mesmas referências podem indicar elementos similares:A Figura 1 é uma ilustração de lado direito de um trator de duas esteiras de configuração padrão, que inclui um perfil de peso durante o percurso na estrada (Técnica anterior);A Figura 2 é uma ilustração de lado direito de um trator de duas esteiras, que inclui um perfil de peso durante o percurso na estrada, de uma modalidade da presente invenção;A Figura 3 é uma ilustração de lado direito de um trator de duas esteiras, que inclui um perfil de peso durante o trabalho de campo, da modalidade do trator de duas esteiras retratada na Figura 2;A Figura 4A apresenta uma vista fotográfica de lado frontal esquerdo de um trator experimental que ilustra recursos do trator de duas esteiras retratados nas Figuras 2 e 3;A Figura 4B retrata um sistema de controle da invenção;A Figura 4C retrata um sistema hidráulico esquemático da invenção;A Figura 4D retrata um microprocessador (computador), que é incluído como parte do sistema de controle;A Figura 5 é uma vista em perspectiva de lado traseiro direito do trator de duas esteiras retratado nas Figuras 2 e 3;A Figura 6 retrata um sistema de condução primário para uso com o trator de duas esteiras da invenção;A Figura 7 retrata uma montagem de roda do trator de duas esteiras de modo a destacar a geometria de ângulo de giro que tem alinhamento correto, conforme usado nas modalidades inventivas das Figuras 2 e 3;A Figura 8 retrata a montagem de roda do trator inventivo de duas esteiras de modo a destacar a geometria de ângulo de giro que tem alinhamento correto para um giro de articulação;A Figura 9 destaca uma vista do centro observando-se adiante e á direita de uma porção da montagem de roda de um trator de duas esteiras da modalidade das Figuras 2 e 3;A Figura 10 retrata uma vista de lado esquerdo frontal de fundo da modalidade das Figuras 2 e 3; A Figura 11 retrata uma vista de lado traseiro de topo do centro observando-se para trás na modalidade das Figuras 2 e 3;A Figura 12 apresenta uma vista de lado traseiro esquerdo de topo da modalidade das Figuras 2 e 3; A Figura 13 apresenta uma vista de lado direito de um trator de duas esteiras convencional ao transportar um implemento traseiro montado (Técnica anterior); A Figura 14 apresenta uma vista de lado direito do trator de duas esteiras da modalidade das Figuras 2 e 3, e perfil de peso, ao transportar um implemento traseiro montado;A Figura 15 apresenta uma vista de lado direito de um trator de duas esteiras convencional que transporta um implemento frontal montado (Técnica anterior); eA Figura 16 apresenta uma vista de lado direito do trator de duas esteiras da modalidade das Figuras 2 e 3, e perfil de peso, ao transportar um implemento frontal montado.
[0033] A descrição a seguir é uma descrição detalhada demodalidades exemplificativas da invenção retratadas nos desenhos anexos. As modalidades exemplificativas são apresentadas em tais detalhes para comunicar claramente a invenção e são projetadas para tornar tais modalidades óbvias a uma pessoa de habilidade comum na técnica. No entanto, a quantidade de detalhes oferecida não é destinada a limitar as variações antecipadas das modalidades; pelo contrário, a intenção é cobrir todas as modificações, equivalentes, e alternativas estão dentro do espirito e escopo da presente invenção, conforme definido pelas concretizações anexas.
[0034] A presente invenção, em uma modalidade, fornece oaparelho para um trator que tem duas montagens de esteira de borracha e uma montagem de roda na parte frontal das montagens de esteira que controla automaticamente uma quantidade de peso que é imposta na montagem de roda, por exemplo, para limitar ou eliminar o deslizamento e, assim, uma quantidade de desgaste em barras de banda de rodagem das montagens de esteira.
[0035] Conforme descrito acima, alguns dos problemasunicamente resolvidos pela invenção são:1. Eliminar ou reduzir amplamente a viagem difícil e vibração;2. Fornecer suspensão para o acionador traseiro;3. Eliminar sensitividade extrema para arfagem que inclui sensitividade de lombada;4. Reduzir de forma significativa a barra de desgaste de banda de rodagem;5. Alcançar carga uniforme sob-rodas intermediárias, polias e acionadores;6. Reduzir a concentração de componentes e seu peso na parte traseira do trator, que resultou em comprimento frontal excessivo e contra peso frontal excessivo em tratores de duas esteiras;7. Reduzir perturbações no solo ao girar;8. Fornecer equilíbrio satisfatório com implementos frontais montados;9. Eliminar a necessidade de um sistema de condução suplementar; e10. Aprimorar as características de gerenciamento de estrada para fácil acionamento em uma estrada púbica.
[0036] A Figura 1 representa um lado direito de um trator de duasesteiras convencional com duas montagens de esteira de correia de borracha 12. O perfil de peso sob as esteiras conforme mostrado é representativo do percurso do trator em uma estrada. O peso pesado na parte frontal das montagens de esteira é indicado por I e peso mais leve na parte traseira das montagens de esteira é indicada por LT), em combinação com barras típicas de banda de rodagem separadas, induz a uma vibração no trator inteiro causando danos ao trator e desconforto ao operador assim como desgaste rápido às barras de banda de rodagem ao se deslocar em estradas.
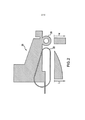
[0037] A Figura 2 retrata um trator de duas esteiras 20 dainvenção, que tem um par de montagens de esteira 22 e uma montagem de roda frontal 26. As montagens de esteira 22 e a montagem de roda frontal têm respectivos perfis de peso (isto é, cargas (L)), sob o comprimento das esteiras (LT; na direção de percurso) e sob as rodas (Lw; conforme mostrado), ao se deslocar em estradas. Incluir a montagem de roda controlada para suportar a carga máxima, conforme mostrado na Figura 2, reduz amplamente a vibração e barra de desgaste de banda de rodagem ao se deslocar em estradas conforme comparado aos tratores de duas esteiras convencionais que não incluem uma montagem de roda frontal então controlada. Com a invenção, o operador está mais confortável e o trator não é propenso a danos de vibrações.
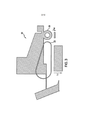
[0038] A invenção inclui mecanismos e um sistema de controleque causa deliberadamente esse perfil de peso ou carga. A Figura 3 retrata a modalidade (da Figura 2) durante o trabalho de campo. No mesmo, o perfil de peso desejado sob as montagens de esteira (LT conforme mostrado na Figura 3) e da montagem de roda frontal (Lw conforme mostrado na Figura 3) são ilustrados.
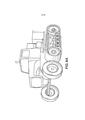
[0039] A Figura 4A retrata um trator de duas esteiras da invençãoque inclui uma montagem de roda 26 localizada na parte frontal de um par de montagens de esteira 22. Cada montagem de esteira 22 é montada em uma haste de articulação (não claramente observada na Figura 4) localizada na metade do caminho entre seus fusos frontal e traseiro. Um momento pode ser aplicado às montagens de esteira ao redor da haste de articulação com o uso de um cilindro hidráulico que tem um braço de momento, que é a distância perpendicular da direção de força ao eixo geométrico de articulação. Nesse caso, a direção de força é a linha central do cilindro hidráulico.
[0040] Diferente de um típico veículo de meia-esteira, asmanobras de condução são geradas forçando-se as duas montagens de esteira 22 para se deslocarem em velocidades diferentes. Os dois pneus não alimentados de montagens de roda 26 são sincronizados por ângulo de giro pela invenção durante as manobras de condução a ângulos que evitam que os pneus escorreguem na direção lateral.
[0041] A Figura 4B retrata um sistema de controle da invenção.Observe, no entanto, que os elementos que compreendem o sistema de controle poderiam ser modificados. Por exemplo, o acelerômetro no ciclo de retorno poderia ser substituído usando-se o sinal da célula de carga de eixo frontal: causando alguma redução na precisão. Outro exemplo, há diversas formas de determinar a velocidade de saída de transmissão. Por exemplo, razão de esteira de velocidade X transmissão de mecanismo motor. O microprocessador seria preferencialmente localizado na cabine do trator e teria feixes de fiação que transmitem sinais de entrada e saída.
[0042] A Figura 4C retrata um sistema hidráulico esquemático.Observe, no entanto, que os elementos que compreendem o sistema de controle poderiam ser modificados. Por exemplo, o EH-PRV poderia ser um estilo diferente de válvula tal como uma válvula de alívio de pressão eletro hidráulica. Preferencialmente, o CHC, tanto EH-PRV, a AV, quanto A são duplicadas para cada montagem de esteira. Cada lado recebe tensões de saída separadas, mas idênticas do microprocessador com uma exceção. Durante um giro de articulação, ou giro de raio pequeno em modo de campo, a esteira interior segue no modo de estrada: reduzir a carga na parte frontal da esteira interior.
[0043] O sinal a entrar nesse modo vem do volante que é giradoalém de um ângulo específico. A rotação esquerda ou direita sinaliza a montagem de esteira correta a seguir ao modo de estrada. Isso tem efeito final de reduzir perturbações no solo e reduzir a resistência lateral da esteira ao giro.
[0044] A Figura 4C é um preferencial no aparelho inventivo e tratordevido ao fato de que outros componentes poderiam ser substituídos. Por exemplo, a EH-PRV poderia ser um estilo diferente de válvula tais como uma válvula de alívio de pressão eletro hidráulica. Preferencialmente, o CHC, tanto EH-PRV, a AV, quanto o A são duplicadas para cada montagem de esteira. Cada lado recebe tensões de saída separadas, mas idênticas do microprocessador com uma exceção. Durante um giro de articulação, ou giro de raio pequeno em modo de campo, a esteira interior segue ao modo de estrada: reduzir a carga na parte frontal da esteira interior.
[0045] O sinal a entrar nesse modo vem do volante que é giradoalém de um ângulo específico. A rotação esquerda ou direita sinaliza a montagem de esteira correta para seguir ao modo de estrada. Isso tem o efeito final de reduzir perturbações no solo e reduzir a resistência lateral da esteira ao giro
[0046] A Figura 4D retrata um computador ou microprocessador13, que é incluído como parte do sistema de controle da invenção. O microprocessador inclui pelo menos uma memória 15 para armazenar instruções de computador e elementos/função de entrada/saída 17. O computador ou microprocessador pode ser instalado em qualquer lugar no trator, por exemplo, o computador pode estar sob o capô no compartimento de mecanismo motor, sob o painel no compartimento de acionamento, em uma porta, etc. O computador recebe e processa sinais de sensores do mecanismo motor, dos comutadores como comutadores de janela, seletores de transmissão, inclusive para detectar movimento no pedal de acelerador. As saídas de sensor são usadas para muitos fins incluindo controlar várias válvulas elétricas, servos, etc., com base em cálculos feitos a partir da entrada dos sensores de acordo com o software pelo qual o computador é programado (armazenado na memória).
[0047] A Figura 5 apresenta uma vista do trator de duas esteirasda invenção que destaca que as montagens de esteira 22 são montadas de forma articulada à estrutura central 23 do trator. Para cada montagem de esteira 22, um cilindro hidráulico 25 é anexado à estrutura central 23 do trator e a outra extremidade do cilindro à montagem de esteira 22. Isso forma um mecanismo de momento de contrapeso.
[0048] O cilindro hidráulico 25 produz tanto um momento CWcomo momento CCW em torno da articulação de suporte da montagem de esteira 27. A montagem de roda 26 é montada na estrutura central 23 na parte frontal das montagens de esteira. A barra de tração traseira 21 A e montagem de nó de 3 pontos 21 B são conectadas à estrutura central 23 através de células de carga 29, que têm capacidade de medir todas as cargas de implemento traseiras aplicadas à estrutura central que inclui cargas horizontais, cargas verticais, e momentos. As células de carga e cilindros hidráulicos são parte de um sistema controlado por computador de ciclo fechado (por exemplo, o sistema de controle que controla a distribuição de pressão de solo sob as montagens de esteira).
[0049] A montagem de roda frontal 26 reage aos momentosgerados em torno da articulação de suporte da montagem de esteira. A montagem de roda frontal 26 é forçada por um sistema de controle para transportar peso pesado ao se deslocar em uma estrada.
[0050] A Figura 6 retrata um sistema de condução primário 30para o trator de duas esteiras da presente invenção. O sistema de condução primário 30 é comumente denominado coma condução diferencial e por sua operação, força as duas montagens de esteira a se deslocarem em velocidades diferentes: fazer com que o trator mude as direções de percurso. Uma engrenagem de cruzeta diferencial convencional 31 aciona as duas hastes de saída 33, em que cada uma aciona uma montagem de esteira (não mostrada na Figura 6). Um sistema de engrenagem planetária 36 é conectado às duas hastes de saída conforme mostrado.
[0051] Um motor de condução 38 ao girar, força uma velocidadediferente em cada uma das montagens de esteira. A velocidade de esteira diferente é proporcional à velocidade de motor e direção de motor.
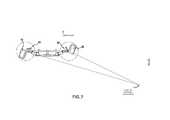
[0052] A Figura 7 retrata a montagem de roda frontal como umsistema de condução Ackerman, que não fornece força de condução durante o trabalho de campo. A geometria de ligação 40 se dá de tal modo que a mesma forneça disposição em esteira apropriada das duas rodas 42. Um sensor de ângulo (não mostrado) é usado para ajudar a definir o raio do giro. O ângulo das rodas é sincronizado com diferença de velocidade de esteira de maneira que evite escorregamento lateral das rodas frontais (velocidade de motor de condução diferencial = (constante A) X [tan (ângulo de condução)] X (velocidade de trator)). Observa-se que há muitos tipos diferentes de sensores de ângulo disponíveis. Na invenção, é preferencial ter o sensor de ângulo dentro do cilindro hidráulico de condução 46 (Figura 8) para medir o curso do cilindro do qual o ângulo de condução pode ser calculado. Outros recursos ou métodos inventivos incluem, porém, sem limitação, sensores montados em cada articulação vertical de roda ou no braço Pitman.
[0053] Uma função da montagem de roda 26 inclui transportarpeso ao se deslocar em estradas: descarregar de forma significativa a parte frontal de cada montagem de esteira.
[0054] Outra função da montagem de roda inclui estabilizar aarfagem dianteira-traseira do trator. A montagem de roda frontal está sempre em contato com o solo. Isso evita que a parte frontal do trator caia subitamente. O atual trator de duas esteiras pode fazer um "mergulho" ao atravessar uma crista afiada tais como um terraço.
[0055] A Figura 8 destaca a geometria de ligação (parcialmenteilustrada), que evita escorregamento lateral da roda frontal quando a condução diferencial causa o que é conhecido na técnica como um giro de articulação. A capacidade de giro de articulação tem uma vantagem de desempenho em tratores convencionais com o uso de pneus. Um giro de articulação direita é ilustrado, em que a montagem de esteira de lado direito tem velocidade zero e a montagem de esteira esquerda se desloca tanto para frente como para trás.
[0056] A linha central de rolagem de cada roda 42 corta o centroda montagem de esteira parada 26 (consulte a articulação central 44 e o sensor de condução de ângulo dentro do cilindro de condução 46). A montagem de roda 26 é anexada a um sistema de suspensão (não mostrado) que é tanto passivo como ativo ou uma combinação de passivo e ativo. Observa-se que a roda no interior de um giro de articulação, gira em um ângulo maior do que a roda exterior. Se o leitor imaginar que uma linha de vista do centro de cada roda, em que os mesmos se cruzam na ponta do triângulo é o centro da esteira interna parada para evitar escorregamento dos pneus. A linha central de rolagem de uma roda é o eixo geométrico do fuso que é uma linha imaginária que se estende ao infinito em ambas as direções. Onde os dois eixos geométricos se cruzam é o centro do Raio de giro Ackerman. A linha central de rolagem das duas montagens de esteira é o eixo geométrico da haste de articulação. A diferença de velocidade de esteira define o local do raio de giro; um ponto que está situado no eixo geométrico da haste de articulação. A sincronização ocorre quando os dois eixos geométricos das rodas de Ackerman se cruzam no dito ponto (consulte a fórmula 1).
[0057] A Figura 9 retrata como a entrada de sistema de controleem relação à quantidade 01 de peso na montagem de roda é gerada. Os fusos de célula de carga, por exemplo, sensor de carga de eixo frontal 48 (consulte a suspensão de pneu pneumático 50), são o modo preferencial para monitorar o peso na montagem de roda 26.
[0058] Preferencialmente, a montagem de roda 26 compreendeum sistema de frenagem compatível com o peso que o mesmo transporta.
[0059] A Figura 10 retrata destaca que um meio de suspensão 52entre a armação central 54 e as montagens de esteira 26 incluídas na estrutura central. Os elementos de mola, conforme mostrado, compreendem bases de borracha 56, mas os elementos de mola não são limitados a tais. Os elementos de mola podem compreender quaisquer elementos de mola conhecidos a um artesão versado. A suspensão ilustrada é do tipo de braço projetante que tem juntas de articulação 58 que conectam o meio de suspensão 52 à armação central.
[0060] Uma segunda fonte de suspensão é usar de forma seletivaum acumulador no circuito hidráulico (Figura 4C) que fornece um momento de contrapeso na articulação de montagem de esteira 60. Os acumuladores têm muitos tipos, mas são simplesmente uma câmara parcialmente preenchida com um gás comprimível, comumente nitrogênio. Á medida que o óleo flui em um fora do um acumulador, o mesmo comprime e descomprime o nitrogênio, atuando como uma mola compacta. O acumulador pode ser montado quase em qualquer lugar e conectado ao sistema hidráulico conforme mostrado na Figura 4C (item A). Uma válvula simples (AV) pode travar o mesmo dentro ou fora de um sistema hidráulico conforme necessário. O acumulador pode ser posicionado dentro do cilindro de articulação 82 (Figura 11). Uma terceira fonte de suspensão é usar pneus pneumáticos na montagem de roda. Uma quarta fonte de suspensão pode ser fornecer suspensão interna dentro de cada montagem de esteira. Uma quinta fonte pode ser fornecer suspensão entre a montagem de roda e a armação central 54. Centralizada na parte frontal das hastes de articulação da montagem de esteira está uma ligação (74, 84; A Figura 11) destinada a tomar forças laterais sem inibir movimentos verticais. As hastes de acionamento 62 que saem às montagens de esteira são mostradas como tendo um par de juntas em U 64 que podem tolerar as oscilações de montagem de esteira e os movimentos da suspensão.
[0061] O estojo diferencial de condução 66 é mostrado no centrodo trator e imediatamente atrás das barras de articulação 58 da montagem de esteira 26. A montagem de diferenciação de condução é acionada conforme mostrado da parte traseira por uma haste aberta de acionamento que é parcialmente ilustrada. Reconheça, no entanto, que o estojo de transmissão e o estojo de condução diferencial 68 não precisam ser componentes separados.
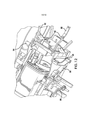
[0062] A Figura 11 mostra o acionamento final 70 localizado nocentro do fuso traseiro da montagem de esteira 74. Preferencialmente, o acionamento final 70 tem uma alta redução de modo a manter a montante dos componentes de trem de acionamento o peso pequeno e leve.
[0063] A dupla redução com uma engrenagem de polia 76 é usadana ilustração; consulte o freio 72; articulação central 78; primeira entrada de redução 80; cilindro de contrapeso 82; mecanismo de contrapeso 84; armação central 86. Na Figura, A primeira engrenagem de redução não é mostrada. A primeira engrenagem de redução, que usa uma polia, é comumente usada.
[0064] Preferencialmente, o freio da montagem de esteira 72 éconectado diretamente ao fuso traseiro da montagem de esteira 74. Por essa questão, também é preferencial que a haste de acionamento de entrada seja localizada próxima à articulação central 78 da montagem de esteira de modo a manter a flexão da haste de acionamento de entrada 96 a um mínimo.
[0065] O mecanismo de momento de contrapeso 84 é ilustrado. Ocilindro hidráulico 82 é anexado à armação da montagem de esteira 84 e à estrutura central 86 de maneira que forme um braço de alavanca.
[0066] A Figura 12 destaca a estrutura de suporte 94 da barra detração 90 e o nó de 3 pontos 92 é montado em células eletrônicas de carga 94 com capacidade de inserir informações que definem cargas horizontais, cargas verticais, e momentos produzidos pelo implemento; consulte a haste de acionamento 96 e o cilindro de contrapeso 98.FÓRMULAS BÁSICAS1. Velocidade de motor de condução diferencial = (constante A) X [tan (ângulo de condução)] X (velocidade de trator)2. Soma de momentos em torno da linha central de articulação da esteira = zero3. Soma de forças na direção horizontal = zero4. Soma de forças na direção vertical = zero5. Força de cilindro = pressão x (área de cilindro)6. Pressão = (tensão aplicada) x (fator de calibração EHPRV)7. Momento = força x (comprimento de braço de momento)8. Peso de combustível = equação de conversão x saída de tensão de indicador de combustível9. (comprimento de braço de momento para forças de tração) = (altura de haste de articulação acima do solo + 3 cm permissão de penetração de barra de banda de rodagem no solo)10. (momento de contrapeso gerado) = (pressão hidráulica) X (área de cilindro) X (comprimento de braço de momento de contrapeso)11. Equação de perfil de carga de esteira P = (aL2 + bl_ + c) (número variável calculado com o uso da equação de soma de momentos e equação de soma de forças verticais)12. Posição de cilindro de condução de conversão de fórmula de calibração ao ângulo de condução
[0067] A fórmula é a base para sincronizar a condução diferenciale a condução da roda frontal. A constante A é baseada em razões de engrenagem fixa dentro da condução diferencial e acionamento final, diâmetro de acionador de esteira fixa, base de roda fixa do trator e um indicador fixo do trator.
[0068] O operador seleciona a velocidade do veículo e gira ovolante para seguir uma trajetória. O volante conduz a montagem de roda frontal de maneira convencional. A partir disso, o sistema de controle recebe uma entrada de ângulo de condução e uma entrada de velocidade de veículo e calcula a velocidade de motor de condução diferencial exigida.
[0069] Essa manobra de condução informa ao microprocessadordo sistema de controle para produzir a velocidade de motor de condução diferencial calculada. O microprocessador é programado para concluir isso iniciando uma tensão crescente à bomba de condução diferencial. A velocidade de motor de condução diferencial está em um circuito de ciclo fechado que permite que o microprocessador itere. A tensão aumenta até que a velocidade desejada de motor de condução diferencial seja alcançada.
[0070] Observa-se que, para conduzir as rodas frontais emvelocidade zero de trator, a velocidade de motor de condução diferencial calculada é zero. Isso é desejado por razões de segurança e devido ao fato de que os operadores estão acostumados a girar a roda frontal dos veículos enquanto a mesma ainda está parada e sem nenhum movimento de veículo.
[0071] A fórmula 2 é satisfeita pelas forças de medição de célulasde carga tanto na direção horizontal quanto na direção vertical. Os braços de momento tanto das forças horizontais quanto das forças verticais de todas as posições de células de carga são conhecidos, valores fixos. O peso de base da estrutura de trator tem braços de momento fixos conhecidos. Se o braço de momento do peso de combustível não for uma constante, então uma fórmula para esse braço de momento pode ser desenvolvida e colocada no programa do sistema de controle.
[0072] A fórmula 3 é satisfeita por todas as cargas horizontaisexternas aplicadas ao trator que são transferidas através das células de carga.
[0073] A fórmula 4 é satisfeita por todas as cargas verticaisvariáveis que são medidas pelas células de carga e pelo indicador de combustível.
[0074] A fórmula 6 é satisfeita sabendo-se os dados de tensãoversus pressão da válvula de redução de pressão: EH-PRV.
[0075] A fórmula 8 é satisfeita com o uso de um indicador decombustível calibrado para o formato do tanque de combustível.
[0076] Manter uniforme pressão de solo sob as esteiras édesafiador. Se a articulação da esteira for centralizada horizontalmente entre a polia e o acionador, as cargas verticais na articulação serão uniformemente distribuídas sob as esteiras. As forças de tração geradas no solo criarão um momento em torno da articulação de esteira.
[0077] Observa-se que, conforme usado no presente documento, o comprimento de braço de momento para forças de tração = altura de haste de articulação acima do solo + permissão de 3 cm para penetração de barra de banda de rodagem no solo; força de tração exigida = (soma de cargas horizontais detectadas por sensores de carga de nó frontal de traseiro) + (trator peso + peso de combustível+ operador); momento de tração = {(altura de haste de articulação acima do solo + permissão de 3 cm para penetração de barra de banda de rodagem no solo)} X {(soma de cargas horizontais detectadas por sensores de carga de nó frontal de traseiro) + (trator peso + peso de combustível+ operador) X tan (ângulo de declive de terreno dianteiro- traseiro)}; momento de contrapeso = (-1) X (momento de tração); momento de contrapeso = (pressão (hidráulica) hidráulica) X (área de cilindro) X (comprimento de braço de momento de contrapeso) = (pressão hidráulica) X (constante E) X (área de cilindro).
[0078] Se o momento de contrapeso é computado como negativo,isto é, o cilindro hidráulico é pressurizado para puxamento, a área de cilindro precisará de um componente que subtrai a área de bastão. Esse será o caso ao transportar a polia frontal e transportar o implemento traseiro no nó de 3 pontos.
[0079] Quando um carregador de extremidade frontal é usado, osuporte frontal do carregador deve ser anexado à estrutura frontal que contém os sensores de carga de nó de 3 pontos. O suporte traseiro do carregador deve ser uma junta de deslizamento horizontal. Isso permitirá que os sensores de carga relatem a força horizontal do carregador. A carga útil poderia ser reportada ao computador com o uso da geometria do carregador.
[0080] Sobrepujar o modo de pressão de solo uniforme é agoraexplicado.
[0081] Manter pressão de solo uniforme sob as esteiras precisaser sobrepujado se a carga de eixo frontal se aproxima de zero. Isso poderia acontecer se o contrapeso frontal é insuficiente. Portanto, para as cargas de eixo frontal abaixo de em torno de 75 kg por pneu, o sensor de carga de eixo frontal No fuso de roda precisa controlar e ajustar a pressão do mecanismo de momento de contrapeso de modo que mantenha a carga no eixo frontal acima zero. Conforme usado, a pressão delta = (-1) X (constante F) X [(75 - carga)]2, isto é, para valores positivos de (75- carga) medidos pelo último segundo passado de tempo.
[0082] A pressão delta disponível está em torno de 30.000 kpa,derivada de 15.000 kpa de impulsão para 15.000 kpa de puxamento. Se esse modo de sobrepujamento persistir, uma mensagem deve ser enviada ao monitor do operador sugerindo que uma quantidade de contrapeso seja adicionada à parte frontal do trator.
[0083] A equação matemática principal usada no sistema decontrole, que pode compreender simplesmente o microprocessador 13 mostrado na Figura 4D, programado para implementar o equilíbrio inventivo, é a soma de momentos em torno da articulação da montagem de esteira é igual a zero. Cada montagem de esteira recebe um momento de contrapeso apropriado, determinado pelo sistema de controle, aplicada por um cilindro hidráulico 98. O sistema de controle recebe entradas, cálculos, e libera a pressão apropriada e direção do momento de contrapeso.
[0084] Diferentes modos, tais como modo de campo ou percursono modo de estrada, usa entradas diferentes para o programa do sistema de controle. Outras equações matemáticas usadas no sistema de controle incluem a soma de forças na direção vertical igual a zero, a soma de forças no momento de direção horizontal igual a zero, uma equação de perfil de peso que descreve o peso sob cada um dos fusos da montagem de esteira.
[0085] A magnitude do momento de contrapeso e a cargas de barra de tração frontal e traseira afeta diretamente o peso sob os fusos da montagem de esteira. A soma dos pesos no acionador, polia, roletes intermediários e a montagem de roda precisa ser igual ao peso total do trator e implementos transportados. Esses valores medidos e conhecidos, por sua vez, permitem que um peso resultante calculado baixo ou zero na polia frontal seja um fator de controle durante o percurso no modo de estrada.
[0086] Em mais detalhes, o microprocessador do sistema decontrole primeiro computa o momento de contrapeso para aplicar uma carga uniforme sob as esteiras da situação em tempo real. Um percurso na estrada situação em tempo real pode variar de transportar cargas frontal e/ou traseira. A situação em tempo real pode variar de puxamento ou impulsão de um vagão pesado na barra de tração ou nenhuma carga. O sistema de controle pode computar, em tempo real, um momento de contrapeso para uma distribuição de carga uniforme para qualquer situação em tempo real para percurso no modo de estrada.
[0087] Para o cálculo de carga uniforme em tempo real, omicroprocessador será instruído, no modo de estrada, dentro desse programa, para adicionar um momento de desequilíbrio. O microprocessador usará a equação de perfil de carga 11. Na equação 11, L é a distância adiante do fuso traseiro da montagem de esteira. Se a montagem de esteira tem 4 fusos (por exemplo), o valor L de cada fuso é um valor fixo conhecido e o braço de momento de cada fuso em torno do eixo geométrico de articulação da montagem de esteira é um valor fixo conhecido.
[0088] Portanto, haveria um cálculo para P (carga vertical) feitocom o uso de L2, L3, e U: que produz um P1, P2, P3, e P4. Na etapa -1., P1, P2, P3, e P4 têm valores de carga conhecidos idênticos, isto é, distribuição de carga uniforme, a soma de P1, P2, P3, e P4 é um valor conhecido em tempo real.
[0089] O microprocessador adiciona um momento de desequilíbrioem uma taxa prescrita de aumento. O processo de adição do momento de desequilíbrio não muda a soma conhecida de P1, P2, P3, e P4. Isso permite que os valores diferentes de P1, P2, P3, e P4 sejam dados valores de carga durante o desequilíbrio. P é a carga no fuso frontal e é a carga alvo a ser mantida em percurso no modo de estrada. Essa carga alvo é uma constante posta no programa do microprocessador. P4 é no ciclo de retorno e é usado para parar a adição de um momento de desequilíbrio isto é, P4 é a força de controle para adicionar o momento de desequilíbrio.
[0090] O microprocessador mantém um momento de desequilíbrioque satisfez a constante atribuída a P4 durante o percurso no modo de estrada. A maior parte das superfícies de estrada tem perfis tanto côncavos quanto convexos. Portanto, manter P4 dentro de uma tolerância permitida é um processo dinâmico de iteração. Isso significa que o microprocessador adiciona e subtrai a quantidade de momento de desequilíbrio em tempo real. As entradas de solavancos momentâneos de estrada e buracos são permitidas a serem negligenciados, isto é, medir as entradas afetadas.
[0091] A Figura 13 destaca um trator padrão de duas esteiras 10que transporta um implemento montado de 3 pontos 8. Quando o implemento 8 é abaixado, o solo suporta o implemento, mudando de forma significativa o peso (isto é, perfil de carga (LT)) nos fusos frontais da montagem de esteira, conforme mostrado. As rodas de indicador do implemento 9 transportam o peso do implemento 8 durante o percurso de campo. Para a situação estática ilustrada, escolher o peso de 3 pontos faz com que os fusos frontais 14A do peso na montagem de esteira 22 mudem de um peso pesado a quase nenhum peso.
[0092] Um contrapeso frontal é muito leve para percurso seguro na estrada. A situação ilustrada é propensa a se tornar instável em altas velocidades durante o percurso na estrada. Um solavanco de degrau, por exemplo, pode iniciar uma condição de arfagem severa, para trás e para frente: comprometendo o controle do trator. Sob determinadas condições, um alto solavanco de degrau de 100 mm e que não tem suspensão traseiras, a análise de computador indica que em velocidades típicas de estrada, o trator de duas esteiras de configuração padrão sobe completamente do solo.
[0093] A Figura 14 destaca o peso de 3 pontos completamenteselecionado da modalidade da invenção retratada nas Figuras 2 e 3 e descrita em detalhes no presente documento. Na Figura, y = (ax2 + bx +c) x (variável). Quando o implemento 8 é abaixado e trabalha, o solo suporta o peso do implemento.
[0094] Especificamente, as rodas de indicador do implementotransportam o peso do implemento durante o trabalho de campo.
[0095] O sistema de controle verifica continuamente pela operaçãosegura. O sistema de controle gerencia a situação tanto para o modo de campo quanto para o percurso no modo de estrada. Para o modo de campo e escolha do peso do implemento, um peso mínimo é mantido na montagem de roda, e o fuso frontal do peso da montagem de esteira é reduzido conforme necessário.
[0096] Para a escolha do modo de campo e peso, se o sistema decontrole calcular o fuso frontal do peso da montagem de esteira transportado como negativo, as informações piscam no monitor do operador, indicando a quantidade mínima de contrapeso frontal que deve ser adicionada. For percurso no modo de estrada e com o uso do mecanismo de momento de contrapeso, o sistema de controle garante um peso mínimo na montagem de roda que é necessário para operação segura.
[0097] À medida que o trator de duas esteiras da invenção tem dois sistemas de condução que suplementam um ao outro se um falhar ou for degradado, sem o custo adicional de que a configurações padrão de duas esteiras exigem. Se a condução diferencial falhar, as rodas frontais ainda mantêm o controle do trator para proporcionar ao mesmo uma parada segura ou um modo de degradação de emergência. Se um pneu frontal furar ou de outro modo falhar, a condução diferencial mantém o controle para uma parada segura.
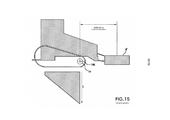
[0098] A Figura 15 retrata um trator padrão de duas esteiras comum implemento frontal montado 8'. O leitor deve observar que, mesmo que alguns implementos frontais montados tenham rodas indicadoras, o implemento é tipicamente selecionado para o percurso na estrada. O fulcro de tombamento é a polia frontal da montagem de esteira 14. A distância de cantiléver do implemento frontal montado 8', medida a partir dos fusos da polia frontal é grande devido ao fato de que o trator padrão de duas esteiras tende a ter um nariz extenso. O peso 8' transportado na parte frontal da montagem de esteira é grande quando as rodas indicadoras são transportadas.
[0099] Conforme usado no presente documento, grandes meiospesados, isto é, muitas libras tais como 2.000 libras (907,1 kg). Nós de 3 pontos têm algumas das características de ligações de paralelogramo. Quando o enlace superior é paralelo aos dois enlaces inferiores, o nó de 3 pontos é uma ligação de paralelogramo exata. Para essa situação e se a capacidade de içamento do nó de 3 pontos é de 10 toneladas, por exemplo, o nó pode içar um implemento de 10 toneladas independentemente do quão distante removido o fulcro o CG do implemento está.
[00100] Barras de ponta trabalham no princípio de criar grandes forças no fulcro aplicando-se uma pequena força na extremidade de um longo manípulo. Determinados implementos (por exemplo, arados) anexados a um nó de paralelogramo de 3 pontos podem ter o efeito de uma longa barra de ponta de manípulo. Para a Figura 15, a polia frontal 14 é o fulcro e pode ter que transportar uma carga diversas vezes o peso do implemento.
[00101] Para o percurso na estrada, essa invenção coloca essa carga pesada em pneus que têm padrões de banda de rodagem projetados para transportar carga pesada sem vibrar e sem taxas de desgaste rápido. O desgaste da correia durante o percurso na estrada é proporcional à quantidade de peso transportado nas polias frontais 14.
[00102] Vibrações induzidas sob as polias frontais 14 têm altas amplitudes. As vibrações de alta amplitude são cíclicas. As forças anexas são cíclicas e o movimento da massa é cíclico. Para vibrações, isso pode ter referência à geração de uma grande força de pico ou para mover uma grande distância às extremidades do curso da vibração.
[00103] A Figura 16 apresenta uma modalidade de um trator de duas esteiras da invenção que inclui um implemento frontal montado 8'. O fulcro de tombamento 14A no aparelho inventivo ou trator é o fuso de pneu frontal 26. A distância de cantiléver do implemento frontal montado é reduzida, conforme mostrado. A montagem de esteira 22 não transporta o implemento frontal montado 8'. A montagem de roda transporta o peso conforme necessário. Os perfis de peso (ou carga (L)) sob as montagens de esteira 26 são mostrados.
[00104] Para trabalho de campo, o sistema de controle mantém uma distribuição uniforme. Para o percurso na estrada, o peso transportado na polia frontal 14 é reduzido de modo a evitar a criação de vibrações e manter o desgaste da correia a um mínimo.
[00105] O sistema de controle compreende sensores dedicados ou compartilhados para inserir o seguinte:
[00106] A barra de tração traseira e cargas de 3 pontos - barra de tração de momento vertical, horizontal, e front e cargas frontais de 3 pontos - vertical, horizontal, e de momento;montagem de rodo peso transportada;montagem de roda ângulo de giro;os ângulos de volante do operador a montagem de roda: com o uso de tecnologia de condução de taxa variável modificada devido ao fato de que o pneu dentro do giro precisa ter capacidade de ir rapidamente a um ângulo de 90 graus;o ângulo de giro da montagem de roda, e velocidade do veículo, são variáveis usadas para determinar o rpm e direção do motor de condução diferencial;rpm e direção de rotação do motor de condução diferencial;velocidade de saída de transmissão;peso de combustível - calculada a partir das informações de indicador de combustível;modo de operação - tais como trabalho de campo, percurso na estrada, carregador de extremidade frontal, etc.; eacelerômetro de suspensão ativa de montagem de roda.
[00107] A invenção inclui ou opera com uma pluralidade de constantes necessárias pelo sistema de controle mostrado no seguinte:
[00108] Todos os comprimentos de alavanca de todas as células de carga à articulação de montagem de esteira;comprimento de alavanca do cilindro do mecanismo de momento de contrapeso;comprimento de alavanca da carga de combustível à articulação de montagem de esteira;peso de embarque e centro de gravidade (CG) da porção central do trator;peso de embarque e CG das montagens de esteira; local da articulação da montagem de esteira de fusos frontal e traseiro - horizontal e vertical;constante de condução diferencial - velocidade de motor à diferença de velocidade de esteira;distância dianteira-traseira da articulação da montagem de esteira à linha central de montagem de roda;peso e CG da montagem de roda.
[00109] Pesos de embarque e centros horizontais de gravidade têm uma função de evitar que a parte frontal das montagens de esteira suba do solo durante o percurso no modo de estrada. A soma de momentos ao redor da articulação da montagem de esteira igual a zero a equação precisa saber os pesos de embarque e os centros horizontais de gravidade.
[00110] O sistema de controle fornece sinais de saída para o seguinte:a pressão e direção corretas para os cilindros de lado esquerdo e direito do mecanismo de momento de contrapeso;a velocidade e direção correta do motor de condução, que sincroniza o ângulo de giro da montagem de roda e a diferença de velocidade de esteira;sinais e avisos ao monitor do operador que informam a quantidade preferencial de contrapesos para adição ou remoção, incluindo o sistema de controle que mantém um histograma de carga para os vários minutos ou horas passadas;determinados sinais de sobrepujamento em vista do fato de que o modo primário do trabalho de campo é manter uniforme a distribuição de pressão de solo sob as esteiras, em que muito pouco peso na montagem de roda precisa resultar na geração de um sinal de sobrepujamento de modo a manter a montagem de roda no solo. Fontes prováveis que produzem um sinal de sobrepujamento incluem um implemento em cantiléver montado de 3 pontos em posição elevada, contrapeso não suficiente, etc.
[00111] No modo de sobrepujamento, o sensor de peso da montagem de roda torna-se o sensor de controle que o sistema de controle responde.
[00112] Conforme declarado, a invenção inclui meios que funcionam como alavancas para colocar mais peso nos fusos de esteira frontal fariam com que as leis da física reduzissem o peso na roda frontal. Na invenção, essas duas alavancas são movidas com cilindros hidráulicos para fazer com que a carga da montagem de roda frontal varie. As duas alavancas e os dois cilindros hidráulicos operam como o mecanismo de momento de contrapeso. As duas alavancas são uma parte integral da estrutura de armação da montagem de esteira. Esse mecanismo é preferencialmente posicionado próximo à parte posterior ou ao trator exatamente como os manípulos de carrinho de mão estão na parte posterior: distantes da roda frontal.
[00113] Na invenção, os meios primários são: 1. A haste de articulação da montagem de esteira, 2. O mecanismo de momento de contrapeso, e 3. O sistema de controle, que, junto, opera para mover a maior parte do peso nos fusos frontais da montagem de esteira durante o percurso na estrada e aos cilindros do mecanismo de momento de contrapeso que reagem apropriadamente às cargasaplicadas ao trator que são paralelas ao solo. As células de cargafornecem entrada ao sistema de controle de modo a definir amagnitude resultante dessa carga paralela.
[00114] A força de tração, igual à magnitude dessa carga, éaplicada paralela ao solo e no nível do solo pela interação das barras de banda de rodagem da montagem de esteira e o solo.
[00115] O resultado natural da linha central de articulação elevada da montagem de esteira acima do solo é esse. Há um momento de tombamento aplicado na articulação de montagem de esteira quando cargas paralelas, tais como puxamento de barra de tração, são experimentadas. O momento de tombamento induzido por tração rompe a distribuição de pressão de solo uniforme desejada sob as esteiras. A lei de forças iguais ou opostas ajuda a criar a magnitude do momento de tombamento conhecido. O sistema de controle aplica um momento de contrapeso que resulta na pressão de solo sob as esteiras que são uniformes.
[00116] O sistema de controle, Figura 4B, garante que os pneus da montagem de roda sempre permaneçam em contato com o solo. O sensor de peso na montagem de roda monitora o peso e se o peso se aproximar de zero, o sensor de peso sinaliza ao sistema de controle para seguir ao modo de sobrepujamento. Os componentes físicos do sistema de controle não são mostrados exceto por parte das células de carga. Os trabalhos do sistema de controle já são descritos em detalhes. O microprocessador e feixes de fiação são componentes comuns. O modo de sobrepujamento faz com que o torque do mecanismo de momento de contrapeso desvie o peso da parte frontal das montagens de esteira e na parte posterior das montagens de esteira. O resultado final disso é uma força reacionária para baixo ou carga (L) na montagem de roda, conforme mostrado nas Figuras.
[00117] Durante o trabalho de campo, todos os tratores geralmente encontram obstáculos e situações, que podem ser categorizados ou são um resultado da textura de superfície do solo e os recursos de terreno do solo. Típicos recursos de terreno incluem terraços e canais. O trator padrão de duas esteiras tende a arfar adiante violentamente ao atravessar as cristas convexas abruptas de tais recursos, que podem ser tanto perigosas quanto desconfortáveis para o operador e pode causar alto estresse em alguns dos componentes do trator. O trator inventivo de duas esteiras mantém a montagem de roda em contato com o solo em todos os tempos evita arfagem violenta ou desconfortável do trator e torna a viagem mais suave. O trator inventivo de duas esteiras exige estrutura menos pesada na traseira: mover o centro de gravidade (CG) adiante.
[00118] Os tratores de duas esteiras convencionais exigem componentes pesados localizados próximos à parte traseira do trator por razões estruturais e funcionais. Mas essa grande quantidade de peso na traseira do veículo é geralmente não favorável para fornecer um centro de gravidade desejável ou equilíbrio para um trator usado primeiramente para rebocar cargas, nem para transportar implementos pesados na parte traseira do trator. Para equilibrar apropriadamente um trator para rebocar e/ou transportar pesos traseiros, contrapesos frontais são geralmente fornecidos, mas tendem a tornar o trator mais pesado do que o desejado.
[00119] Ramificações desse peso extra incluem suporte adicionalde estruturas protetoras contra capotagem (ROPS), mais custos, maior desgaste da correia durante o percurso na estrada, mais compactação, etc. É comum a pratica de deixar os contrapesos frontais no lugar durante o tempo gasto se deslocando em estradas. Esta frequentemente coloca o centro de gravidade adiante do local preferencial para deslocamento em estradas; tornando o trator pesado na parte frontal.
[00120] No trator inventivo de duas esteiras, ao se deslocar em estradas, a montagem de roda assume uma função de condução devido ao fato de que uma quantidade significativa de peso na montagem de roda fornece uma quantidade significativa de tração lateral quando os pneus são angulados. Desse modo, mudar as direções durante o percurso em estradas é um esforço combinado de condução diferencial e a força lateral produzida pela montagem de roda.
[00121] O trator inventivo de duas esteiras também é vantajoso no fato de que o mesmo fornece um fator de segurança adicional em determinadas situações. Por exemplo, um vagão carregado que impulsiona o trator para baixo de uma colina pode exigir forças de frenagem que se aproximam da capacidade máxima da tração da esteira. A condução diferencial exige que as esteiras apliquem tração de modo a conduzir. Durante o percurso na estrada, se qualquer combinação de situações exceder a capacidade de tração montagem da esteira, a capacidade de condução da montagem de roda fornece condução substituta.
[00122] Referindo-se novamente à Figura 14 e a situação detransporte de um peso pesado de 3 pontos durante o percurso na estrada, o peso mínimo, programado no sistema de controle, para a montagem de roda garante que a montagem de roda pode girar o trator adequadamente para condução segura durante o percurso na estrada.
[00123] O trator inventivo de duas esteiras, conforme explicada acima, inclui dois sistemas de condução. A condução diferencial é o sistema primário. Embora a montagem de roda seja incluída não somente para condução, a mesma tem capacidades de condução Ackerman. Um propósito destinado da montagem de roda é transportar a parte frontal das montagens de esteira durante o percurso na estrada. Outro propósito é transportar implementos frontais montados. Outro propósito é para reduzir a arfagem. Outro propósito da montagem de roda é ser o membro de reação que permite que o mecanismo de momento de contrapeso forneça pressão de solo uniforme.
[00124] À medida que a montagem de roda transporta uma quantidade significativa de peso durante o percurso na estrada, a tração lateral dos pneus fornece naturalmente uma força de condução. A montagem de roda é um sistema de condução de recuperação para o trator durante o percurso na estrada.
[00125] Conforme mostrado na Figura 10, o sistema de suspensão de braço projetante da haste de articulação da montagem de esteira serve como parte do pacote de sistema de suspensão. As rodas preferenciais da montagem de roda in front são um par de pneus pneumáticos que tem características de suspensão. A montagem de roda tem uma articulação central para oscilação lateral e um sistema de suspensão de dois modos que anexa a mesma à estrutura central: ativa e passiva (Figura 4C (lado direito) destaca o sistema de eixo frontal).
[00126] Referindo-se novamente à Figura 13 e à Figura 14, o centro geral de gravidade é mais próximo à parte traseira das montagens de esteira quando um peso é transportado no nó de 3 pontos. Para a configuração padrão de trator de duas esteiras (Figura 13), isso naturalmente faz com que a carga nos fusos traseiros aumente. O fulcro natural é o fuso traseiro. Para a configuração aprimorada, o fulcro natural é a haste de articulação da montagem de esteira: consideravelmente adiante do fuso traseiro. Por essa razão, a carga nos fusos traseiros no trator inventivo de duas esteiras precisa aumentar de modo a absorver e evitar contrapesos frontais excessivos.
[00127] Na invenção, uma taxa de mola é adicionada aos fusostraseiros das montagens de esteira inserindo-se um acumulador no circuito hidráulico do mecanismo de momento de contrapeso. A taxa de mola é a característica principal de qualquer sistema de suspensão que aprimora a qualidade de viagem, conforme explicada acima. Essa disposição permite que os fusos traseiros das montagens de esteira tenham uma baixa taxa de mola e se movam/oscilem para cima e para baixo em relação à estrutura central do trator. A taxa de mola é o número de unidades de força que o mesmo toma para comprimir uma mola uma unidade de comprimento.
[00128] Falando de forma geral, sistemas de suspensão mais comuns são categorizados como passivos. A montagem de roda é antecipada e experimenta "primeiro encontro" do que o trator está prestes a cruzar. A textura de superfície do solo pode variar de muito suave a pedaços rígidos próximos espaçados de solo trazidos à superfície, por exemplo, por um escarificador, para valas de erosão aleatórias para sulcos criados por outros implementos de lavoura às outras situações. O terreno pode mudar de ascendente para descendente, para encosta, para côncava, para convexa. Para essas situações, o trator de duas esteiras da presente invenção funciona de forma satisfatória e o operador está confortável.
[00129] Durante o trabalho de campo, as texturas de superfíciedescritas acima podem fazer com que o trator tenha alguma combinação de arfagem, rolamento, salto e sacudida. O trator de duas esteiras da presente invenção usa uma combinação dos diversos recursos descritos acima para diminuir amplamente a arfagem rolamento, salto, e sacudida incluindo a oscilação de montagem de esteira, suspensão de montagem de esteira, e suspensão ativa da montagem de roda.
[00130] Durante o percurso na estrada, a textura de superfície do solo é geralmente suave com asperezas menores ocasionais. Os implementos sem suspensão geralmente permitem que os tratores reboquem os mesmos em velocidade total. A desaceleração em estradas secundárias mantidas de forma deficiente é permitida, esperada e necessária. Portanto, tratores de fazenda não precisam de "suspensões militares".
[00131] A montagem de roda é geralmente levemente carregada ao usar implementos traseiros anexados que fazem a lavoura de campo e pesadamente carregada durante o percurso na estrada ou com o uso de determinados implementos frontais montados ou transportando suprimentos antecipadamente. O trator de duas esteiras da presente invenção usa uma combinação de suspensão ativa e passiva, conforme descrito acima.
[00132] Para pesos pesados durante o percurso na estrada e com o uso de determinada maquinaria pesada frontal durante o trabalho de campo, a suspensão passiva controla: preferencialmente com o uso de um ou mais pares de bases de borracha suplementadas preferencialmente por pneus pneumáticos não alimentados que tem bandas de esteira de autoestrada. Durante o percurso no modo de estrada, a suspensão ativa da montagem de roda é preferencialmente desativada. Para a maior parte da lavoura de campo, a suspensão ativa opera com os pares de bases de borracha espaçados conforme necessário para o curso maior exigido do sistema de suspensão ativa (consulte acima).
[00133] A arfagem repetitiva e sacudida associada, causada pela textura de superfície do solo, é quase totalmente eliminada pelo sistema de suspensão ativa usado no trator de duas esteiras da presente invenção. Para atravessar canais côncavos ocasionais ou cristas convexas, o curso da suspensão ativa atua em série com a oscilação da articulação da montagem de esteira forçada pelo mecanismo de momento de contrapeso. A suspensão ativa ajuda a amortecer tanto os solavancos de textura de superfície quanto o terreno côncavo e convexo. O operador admira uma viagem suave.
[00134] A combinação de nova estrutura específica para a armação de trator para conectar vários pontos de articulação, elementos de suspensão, vários sensores, componentes hidráulicos, e sistemas de condução, todos controlados por software específico exclusivo embutido em um microprocessador para fornecer um alto nível de integração homem-máquina não foi alcançada antes em um trator agrícola ou nenhum trator conhecido.
[00135] A presente invenção não exclui usar a suspensão ativa a todo o tempo para a suspensão da montagem de roda. No entanto, a suspensão de modo duplo descrita é mais prática e o modo passivo é geralmente adequado para as situações pesadamente carregadas da montagem de roda. O tamanho físico de alguns dos componentes de suspensão ativa é muito maior se não houver também uma suspensão passiva tal como bases de mola de borracha.
[00136] Para o trator de duas esteiras da presente invenção, o peso leve na montagem de roda e suspensão ativa geralmente ocorre para modo de trabalho de campo: reduzir o tamanho de componente e energia consumida.
[00137] O trator de duas esteiras da presente invenção opera para controlar a montagem de roda para transportar qualquer peso imposto pelo implemento frontal montado ou outro peso frontal.
[00138] Determinados implementos frontais montados, por exemplo, carregadores, aplicam grandes quantidades de peso na montagem de roda. Outros implementos frontais montados são usados para lavoura leve e, desse modo, aplicam diferentes quantidades de peso. Durante manobras de giro, a resistência de guinada pode ser causada por uma combinação que inclui inercia, declive lateral, e componentes de engate de solo. Para implementos amplos de engate de solo, pode haver uma carga de tipo de barra de tração lateralmente irregular que o sistema de condução tem de neutralizar de modo a manter o trator em movimento em sua trajetória destinada.
[00139] O trator de duas esteiras da presente invenção tem a montagem de roda como condução suplementar sempre que houver peso na montagem de roda.
[00140] Durante manobras de giro, há também um efeito de carga em cantiléver lateral horizontal. Para o sistema de condução diferencial do trator padrão de duas esteiras, a distância de cantiléver é medida a partir de cerca do centro dianteiro-traseiro das montagens de esteira. Para o trator de duas esteiras da presente invenção, a distância de cantiléver para a condução diferencial está em torno do mesmo, mas as forças de condução suplementar fornecidas pela montagem de roda têm menos distância de cantiléver lateral.
[00141] Peso frontal e traseiro de cantiléver e inércias correspondentes tendem a produzir galopes que são geralmente livres de sacudidas em superfícies suaves. O amortecimento de galope é fornecido pelo sistema de suspensão de braço projetante e pelos sistemas de suspensão da montagem de roda.
[00142] A montagem de roda do trator de duas esteiras da presente invenção torna a elevação da parte frontal das montagens de esteira possível. Isso reduz parte da penetração da barra de banda de rodagem no solo. As montagens de esteira têm de escorregar lateralmente de modo a conduzir. Ao girar acentuadamente, o trator padrão de duas esteiras tende a perturbar severamente as superfícies do solo devido à penetração de barra de banda de rodagem acoplada ao escorregamento lateral. O trator de duas esteiras da presente invenção, conforme distinguido, reduz de forma significativa as perturbações no solo.
[00143] O sistema de controle do trator de duas esteiras dapresente invenção varia independentemente a pressão hidráulica de produção de momento a cada montagem de esteira, conforme já descrito em detalhes acima. Essa independência é vantajosa em situações tais como giro sob carga, em que a montagem de esteira exterior precisa produzir força de tração adicional. A condução diferencial faz com que isso aconteça. O içamento da parte frontal somente da montagem de esteira interna, que produz menos força de tração, reduz a resistência de giro lateral. A esteira exterior frequentemente precisa manter pressão de solo uniforme de modo a maximizar sua capacidade de tração de modo a fazer o giro. O trator de duas esteiras da invenção conclui isso.
[00144] O sinal e decisão para fazer a variação independente dos dois momentos de contrapeso poderia vir do sensor de ângulo da montagem de roda com outras determinadas condições que contribuem para a decisão.
[00145] Embora a invenção tenha sido explicada em relação a sua modalidade preferencial, deve-se entender que muitas outras modificações possíveis e variações podem ser feitas sem se afastar do espirito e escopo da invenção conforme descrito no presente documento.
Claims (15)
1. Configuração de trator que tem uma combinação de recursos que incluiuma estrutura principal (23, 54, 86);uma estação de controle que tem um meio de controle do trator;um sistema de trem de rolamento que tem uma montagem de esteira de lado esquerdo (12, 22) e uma montagem de esteira de lado direito (12, 22), sendo que ambas as montagens de esteira (12, 22) são anexadas à estrutura principal (23, 54, 86);um mecanismo de roda que contém uma ou mais rodas (42) localizadas na frente das montagens de esteira (12, 22); eum trem de potência configurado para forçar ambas as montagens de esteira (12, 22) a se deslocarem na mesma velocidade ou em velocidades diferentes;caracterizada pormeio para exercer uma força para transferir carga vertical para trás e para frente entre a porção frontal das montagens de esteira (12, 22) e o mecanismo de roda (26);meio para controlar uma quantidade de peso transportada pelo mecanismo de roda (26);meios para fazer com que ou permitir que uma roda (42) ou rodas (42) do mecanismo de roda (26) sigam uma trajetória curvada de trator causada por uma diferença de velocidade de esteira entre as montagens de esteira esquerda e direita (12, 22).
2. Configuração de trator, de acordo com a reivindicação 1, caracterizada pelo fato de que o meio para exercer compreende um mecanismo de momento de contrapeso (84).
3. Configuração de trator, de acordo com a reivindicação 1, caracterizada pelo fato de que o meio para controlar a quantidade de peso transportada pelo mecanismo de roda (26) inclui um controlador ou um sistema de controle.
4. Configuração de trator, de acordo com a reivindicação 1, caracterizada pelo fato de que o meio para fazer com que ou permitir que uma roda (42) ou rodas (42) do mecanismo de roda (26) sigam uma trajetória curvada de trator causada por uma diferença de velocidade de esteira inclui um controlador ou um sistema de controle.
5. Configuração de trator, de acordo com a reivindicação 1, caracterizada pelo fato de que a configuração de trator compreende uma suspensão de eixo frontal com uma suspensão ativa.
6. Trator agrícola, compreendendoum par de montagens de esteira (12, 22) que inclui bandas de rodagem de borracha com barras estabilizadoras, sendo que as montagens de esteira (12, 22) são interconectadas por respectivos eixos frontal e traseiro se estendendo substancialmente perpendicular a uma direção de percurso; euma montagem de roda frontal (26);caracterizado porum controlador que controla automaticamente uma carga imposta na montagem de roda frontal (26) de modo a controlar a carga imposta no eixo frontal das montagens de esteira (12, 22) paraminimizar desgaste de banda de rodagem de borracha.
7. Trator de duas esteiras, de acordo com a reivindicação 6, caracterizado pelo fato de que o controlador controla a geometria de ângulo de giro para manter o alinhamento correto para um giro de articulação.
8. Trator de duas esteiras, de acordo com a reivindicação 6, caracterizado pelo fato de que o controlador controla a carga ao transportar um implemento frontal montado (8’).
9. Trator de duas esteiras, de acordo com a reivindicação 6, caracterizado pelo fato de que as montagens de esteira (12, 22) e a montagem de roda frontal (26) incluem respectivos perfis de peso ou cargas controladas pelo controlador.
10. Trator de duas esteiras, de acordo com a reivindicação 6, caracterizado pelo fato de que as montagens de esteira (12, 22) são montadas em hastes de articulação (27, 60, 78, 84) de tal modo que um momento seja aplicado às montagens de esteira (12, 22) por meio de um cilindro hidráulico (25, 82, 98) com um braço de momento.
11. Trator de duas esteiras, de acordo com a reivindicação 10, caracterizado pelo fato de que a montagem de roda frontal (26) reage a momentos gerados em torno de uma articulação de suporte de montagem de esteira (27, 60, 78, 84).
12. Trator de duas esteiras, de acordo com a reivindicação 6, caracterizado pelo fato de que inclui adicionalmente elementos de mola (56) para suspensão das montagens de esteira (12, 22).
13. Trator de duas esteiras, de acordo com a reivindicação 12, caracterizado pelo fato de que inclui adicionalmente um acumulador (A) para suspensão das montagens de esteira (12, 22).
14. Trator de duas esteiras, de acordo com a reivindicação 6, caracterizado pelo fato de que compreende adicionalmente sensores (29, 48, 94), sendo que o controlador recebe e processa sinais dos sensores (29, 48, 94).
15. Trator de duas esteiras, de acordo com a reivindicação 6, caracterizado pelo fato de que cada uma das duas montagens de esteira (12, 22) é anexada a um cilindro hidráulico (25, 82, 98) e sendo que outra extremidade do cilindro hidráulico (25, 82, 98) é anexada a uma estrutura central (23, 54, 86) do trator.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261590990P | 2012-01-26 | 2012-01-26 | |
| US61/590,990 | 2012-01-26 | ||
| US13/748,778 | 2013-01-24 | ||
| US13/748,778 US8727047B2 (en) | 2012-01-26 | 2013-01-24 | Configuration of a two-track tractor |
| PCT/EP2013/000222 WO2013113484A2 (en) | 2012-01-26 | 2013-01-25 | An improved configuration of a two-track tractor |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| BR112014018394A2 BR112014018394A2 (pt) | 2017-06-20 |
| BR112014018394A8 BR112014018394A8 (pt) | 2017-07-11 |
| BR112014018394B1 true BR112014018394B1 (pt) | 2021-09-21 |
Family
ID=48869297
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112014018394-5A BR112014018394B1 (pt) | 2012-01-26 | 2013-01-25 | Configuração de trator e trator agrícola |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US8727047B2 (pt) |
| EP (1) | EP2807073B1 (pt) |
| BR (1) | BR112014018394B1 (pt) |
| RU (1) | RU2607932C2 (pt) |
| UA (1) | UA115048C2 (pt) |
| WO (1) | WO2013113484A2 (pt) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2878285C (en) | 2012-07-06 | 2020-08-25 | Mtd Products Inc | Drive sprocket for a tracked utility vehicle |
| US9102372B2 (en) * | 2012-07-24 | 2015-08-11 | Caterpillar Inc. | Track drive system and method |
| US9688324B2 (en) | 2013-09-13 | 2017-06-27 | Mtd Products Inc | Drive sprocket for a tracked vehicle |
| US9884662B2 (en) * | 2013-09-13 | 2018-02-06 | Mtd Products Inc | Suspension and lock-out systems for a partially tracked vehicle |
| DE102014110551A1 (de) | 2014-07-25 | 2016-01-28 | Claas Industrietechnik Gmbh | Landwirtschaftliches Fahrzeug |
| US9902441B2 (en) | 2014-08-21 | 2018-02-27 | Mtd Products Inc | Track drive |
| GB201416989D0 (en) | 2014-09-26 | 2014-11-12 | Agco Int Gmbh | Vehicle ballasting assistance |
| CN104210568B (zh) * | 2014-09-28 | 2016-05-04 | 柳州市柳城红科机械制造有限公司 | 一种多功能方向盘拖拉机 |
| DE102015103556A1 (de) * | 2015-03-11 | 2016-09-15 | Manitowoc Crane Group France Sas | Vorrichtung und Verfahren zur Bestimmung der Bodendruckverteilung bei einer mobilen Arbeitsmaschine |
| US20160280292A1 (en) * | 2015-03-25 | 2016-09-29 | Ronald L. Satzler | Two Track Tractor with an Active Suspension System for Reducing Pitch Jerk and Method of Use Thereof by Executing Computer-Executable Instructions Stored On a Non-Transitory Computer-Readable Medium |
| EP4249349A3 (en) | 2015-05-29 | 2023-11-15 | MTD Products Inc | Utility vehicle |
| US10017035B2 (en) | 2016-02-24 | 2018-07-10 | Cnh Industrial America Llc | System and method for controlling a multi-axle work vehicle based on axle loading |
| US9855843B2 (en) | 2016-02-24 | 2018-01-02 | Cnh Industrial America Llc | System and method for controlling the speed of a track-driven work vehicle based on monitored loads to avoid track overheating |
| US9688322B1 (en) | 2016-04-07 | 2017-06-27 | Cnh Industrial America Llc | Implement steerable track assembly with pivoting steering actuator |
| US9926007B2 (en) | 2016-04-07 | 2018-03-27 | Cnh Industrial America Llc | Implement steering system |
| KR102003497B1 (ko) * | 2016-11-16 | 2019-10-01 | 오철규 | 무한궤도식 건설장비의 전도 방지 장치 및 방법 |
| CN107176217A (zh) * | 2017-07-06 | 2017-09-19 | 钦州学院 | 全地形履带运输车 |
| US11511818B2 (en) | 2017-09-05 | 2022-11-29 | Mtd Products Inc | Track drive |
| AU2018346586A1 (en) | 2017-10-06 | 2020-03-12 | Mtd Products Inc | High-efficiency lawn maintenance tool and high-efficiency cutting blade |
| CN108058561B (zh) * | 2017-12-19 | 2023-07-04 | 东风汽车集团有限公司 | 一种可改变悬挂系统的刚度及阻尼特性的主动式悬架系统 |
| US11353111B2 (en) | 2019-02-11 | 2022-06-07 | Caterpillar Paving Products Inc. | Traction control method for a rotary mixer |
| US11618515B2 (en) | 2019-04-09 | 2023-04-04 | Cnh Industrial America Llc | Suspension system for a track-driven work vehicle with tandem rear idler/roller |
| US11753093B2 (en) | 2019-04-09 | 2023-09-12 | Cnh Industrial America Llc | Suspension system for a track-driven work vehicle with pivoting roller wheel assemblies |
| DE102020124266A1 (de) * | 2020-09-17 | 2022-03-17 | Claas Tractor Sas | Traktor mit Raupenlaufwerk |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1416379A (en) * | 1920-09-08 | 1922-05-16 | Peone Valley Virgil | Traction engine |
| US3333867A (en) * | 1965-07-26 | 1967-08-01 | Gen Motors Corp | Suspension unit with parallel shock absorbers |
| US3937288A (en) * | 1974-03-06 | 1976-02-10 | Applied Inventions Corporation | All terrain vehicle |
| US4281882A (en) * | 1977-04-15 | 1981-08-04 | Lely Cornelis V D | Vehicle track with I-shaped ground engaging profiles |
| US4313516A (en) * | 1979-05-04 | 1982-02-02 | Terry D A | Automobile snow assembly |
| FR2651201B1 (fr) * | 1989-08-31 | 1991-10-25 | Framatome Sa | Vehicule a chenilles inclinables. |
| US5337846A (en) * | 1990-08-08 | 1994-08-16 | Kabushiki Kaisha Komatsu Seisakusho | Disaster relief robot and operation controller therefor |
| US5191952A (en) * | 1991-09-19 | 1993-03-09 | Caterpillar Inc. | Track-type vehicle having steerable wheels |
| JPH072151A (ja) * | 1993-06-18 | 1995-01-06 | Honda Motor Co Ltd | クローラベルト式車両 |
| JPH07237567A (ja) * | 1994-02-28 | 1995-09-12 | Honda Motor Co Ltd | クローラベルト式車両の懸架装置 |
| CA2192398C (en) * | 1995-12-26 | 2004-08-03 | Naoki Matsumoto | Crawler-belt vehicle |
| US5975226A (en) * | 1996-07-30 | 1999-11-02 | Honda Giken Kogyo Kabushiki Kaisha | Crawler belt vehicle |
| US6164399A (en) * | 1999-06-02 | 2000-12-26 | Sercel, Inc. | Track-type carriage system for heavy vehicles |
| AU2001236957A1 (en) * | 2000-02-18 | 2001-08-27 | Jlg Industries Inc. | Half-track assembly with suspended idler |
| US6948783B2 (en) * | 2001-12-27 | 2005-09-27 | Caterpillar Inc | Tension adjustment mechanism for a work machine |
| US7673711B1 (en) * | 2002-06-04 | 2010-03-09 | Polaris Industries Inc. | Tracked vehicle |
| US20040090020A1 (en) * | 2002-11-08 | 2004-05-13 | Arctic Cat, Inc. | Electronically controlled active suspension damper |
| US7421954B2 (en) * | 2004-06-18 | 2008-09-09 | Bose Corporation | Active suspension controller |
| DE102006015153A1 (de) * | 2006-03-30 | 2007-10-04 | Claas Industrietechnik Gmbh | Raupenlaufwerk |
| US7779947B2 (en) * | 2007-01-31 | 2010-08-24 | Caterpillar Inc | Acceleration based automated slip control system |
| US7644942B2 (en) * | 2007-03-22 | 2010-01-12 | Cnh America Llc | Active axle suspension system |
| DE102008033067A1 (de) * | 2008-07-15 | 2010-01-21 | Claas Selbstfahrende Erntemaschinen Gmbh | Landwirtschaftliche Erntemaschine |
| US8020948B2 (en) * | 2008-08-27 | 2011-09-20 | Kubota Corporation | Crawler traveling apparatus |
| WO2010086027A1 (de) * | 2009-02-02 | 2010-08-05 | Silicon Fire Ag | Raupenantrieb für ein fahrzeug, fahrzeug mit einem solchen raupenantrieb und verfahren zum fahren eines solchen fahrzeugs |
| RU2401762C1 (ru) * | 2009-04-20 | 2010-10-20 | Феликс Аронович Черняков | Машина |
| US10046815B2 (en) * | 2012-03-27 | 2018-08-14 | Wearpro Incorporated | Wear monitoring device and method of monitoring undercarriage and roller wear |
| US9169623B2 (en) * | 2013-04-25 | 2015-10-27 | Caterpillar Inc. | Wear monitoring system for track type machine |
-
2013
- 2013-01-24 US US13/748,778 patent/US8727047B2/en active Active
- 2013-01-25 EP EP13732085.9A patent/EP2807073B1/en active Active
- 2013-01-25 RU RU2014132833A patent/RU2607932C2/ru active
- 2013-01-25 UA UAA201409432A patent/UA115048C2/uk unknown
- 2013-01-25 WO PCT/EP2013/000222 patent/WO2013113484A2/en active Application Filing
- 2013-01-25 BR BR112014018394-5A patent/BR112014018394B1/pt active IP Right Grant
-
2014
- 2014-04-10 US US14/249,662 patent/US9359021B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| BR112014018394A2 (pt) | 2017-06-20 |
| RU2607932C2 (ru) | 2017-01-11 |
| BR112014018394A8 (pt) | 2017-07-11 |
| US20130192905A1 (en) | 2013-08-01 |
| EP2807073A2 (en) | 2014-12-03 |
| UA115048C2 (uk) | 2017-09-11 |
| RU2014132833A (ru) | 2016-03-20 |
| WO2013113484A3 (en) | 2013-10-03 |
| EP2807073B1 (en) | 2017-11-22 |
| WO2013113484A2 (en) | 2013-08-08 |
| US9359021B2 (en) | 2016-06-07 |
| US8727047B2 (en) | 2014-05-20 |
| US20140216828A1 (en) | 2014-08-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112014018394B1 (pt) | Configuração de trator e trator agrícola | |
| US8825314B2 (en) | Work machine drive train torque vectoring | |
| US3650343A (en) | Ski slope traversing and conditioning vehicle | |
| RU2617897C2 (ru) | Стабилизация лесозаготовительной машины | |
| DE112018005593T5 (de) | Steuersystem für neigbares Fahrzeug | |
| US20140039772A1 (en) | Work Machine Drive Train Torque Vectoring Based on Work Cycle Recognition | |
| CN101175655B (zh) | 三轮车电子稳定系统 | |
| BR112019016096A2 (pt) | sistema de controle de suspensão ativa e método para veículos no-road | |
| Maclaurin | A skid steering model using the Magic Formula | |
| ES2713498T3 (es) | Método y dispositivo para equilibrar las cargas en las ruedas de un vehículo industrial | |
| Rahman et al. | Fuzzy knowledge-based model for prediction of traction force of an electric golf car | |
| Sun et al. | Chassis trafficability simulation and experiment of a LY1352JP forest tracked vehicle | |
| Tota et al. | Steering behavior of an articulated amphibious all-terrain tracked vehicle | |
| Azad et al. | A survey of stability enhancement strategies for articulated steer vehicles | |
| IT202100015206A1 (it) | Metodo di controllo di un veicolo stradale con motori indipendenti agenti su ruote di uno stesso asse e relativo veicolo stradale | |
| JP6510728B2 (ja) | ダンプトラックのピッチング制御システム | |
| Dobretsov et al. | Interaction feature of caterpillar tracks with soil under significant axial displacements of pressure center | |
| Szpaczyńska et al. | The running gear construction impact on overcoming obstacles by light high-mobility tracked UGV | |
| Arote et al. | The dynamic stability index calculator for agricultural tractors equipped with front end loader | |
| Leppänen | Automatic locomotion mode control of wheel-legged robots | |
| WO2013141787A1 (en) | Method and arrangement for estimating height of center of gravity for a trailer | |
| Lashgarian Azad | Dynamic Modelling and Stability Controller Development for Articulated Steer Vehicles | |
| Rahman et al. | Simulated steerability of a segmented rubber tracked vehicle during turning on sepang peat terrain in Malaysia | |
| Cronje | Improving off-road vehicle handling using an active anti-roll bar | |
| BR102022024212A2 (pt) | Controle adaptável de pneus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06F | Objections, documents and/or translations needed after an examination request according [chapter 6.6 patent gazette] | ||
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 25/01/2013, OBSERVADAS AS CONDICOES LEGAIS. |