WO2024203180A1 - 作業機 - Google Patents
作業機 Download PDFInfo
- Publication number
- WO2024203180A1 WO2024203180A1 PCT/JP2024/009136 JP2024009136W WO2024203180A1 WO 2024203180 A1 WO2024203180 A1 WO 2024203180A1 JP 2024009136 W JP2024009136 W JP 2024009136W WO 2024203180 A1 WO2024203180 A1 WO 2024203180A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- relays
- work machine
- power supply
- relay
- stator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images




























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25F—COMBINATION OR MULTI-PURPOSE TOOLS NOT OTHERWISE PROVIDED FOR; DETAILS OR COMPONENTS OF PORTABLE POWER-DRIVEN TOOLS NOT PARTICULARLY RELATED TO THE OPERATIONS PERFORMED AND NOT OTHERWISE PROVIDED FOR
- B25F5/00—Details or components of portable power-driven tools not particularly related to the operations performed and not otherwise provided for
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K19/00—Synchronous motors or generators
- H02K19/16—Synchronous generators
- H02K19/36—Structural association of synchronous generators with auxiliary electric devices influencing the characteristic of the generator or controlling the generator, e.g. with impedances or switches
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
- H02K3/18—Windings for salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
- H02K3/28—Layout of windings or of connections between windings
Definitions
- the present invention relates to a work machine.
- Patent Document 1 discloses an electric tool as a work machine in which the motor winding connection method can be switched between series connection and parallel connection depending on the type of power source (power source voltage) connected. Patent Document 1 also discloses that a board equipped with a relay for switching the connection method is attached to the end of the motor (the end of the stator).
- the present inventors have recognized that there are problems to be solved when introducing a connection switching technique that enables the winding connection method to be switched between delta connection and star connection into a work machine.
- -Problem 1 ...To provide a work machine in which a circuit board having a plurality of relays for switching between delta connection and star connection is arranged in an appropriate location.
- Problem 2 To provide a work machine that can be easily assembled even when a board having a plurality of relays for switching between delta connection and star connection is provided at the end of a stator.
- Problem 3 To provide a work machine having a configuration that can withstand large currents while having multiple relays on a board that switch between delta connection and star connection.
- Issue 4 To provide a work machine that is not too large.
- the present invention aims to solve at least one of the above problems 1 to 4.
- One aspect of the present invention is a work machine.
- This work machine has a motor with a stator including multiple windings, multiple relays that can switch the connection method of the multiple windings between delta connection and star connection, and a first board on which the multiple relays are mounted, and is characterized in that the first board is disposed at one end of the stator in the axial direction of the motor.
- This work machine has a motor having a stator including multiple windings, multiple relays capable of switching the connection method of the multiple windings between delta connection and star connection, and a first board on which the multiple relays are mounted, and the multiple relays include three first relays that are turned on when the connection method is delta connection and two second relays that are turned on when the connection method is star connection, and the coils of the three first relays are connected in series with each other, the coils of the two second relays are connected in series with each other, and the work machine has a first step-down circuit that steps down a power supply voltage supplied from an external source and supplies it to each coil of the multiple first relays, and a second step-down circuit that steps down the power supply voltage and supplies it to each coil of the multiple second relays, the second step-down circuit having a step-down rate higher than that of the first step-down circuit.
- the present invention may be expressed as an "electrical work machine", “electrical tool”, “electrical equipment”, etc., and such expressions are also valid aspects of the present invention.
- the present invention can solve at least one of the above problems 1 to 4.
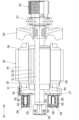
- FIG. 1 is a left side view, with a portion in section, of a work machine 1 according to a first embodiment of the present invention
- 2A is a cross-sectional view taken along the line A-A in FIG. 1.
- FIG. 2B is an enlarged view of part B in FIG.
- FIG. 2 is a perspective view of a motor 30 and its surrounding configuration in the work machine 1.
- FIG. 4 is a top view of the motor 30 and its peripheral configuration.
- FIG. 2 is a top cross-sectional view of the motor 30 and its surrounding configuration.
- FIG. 4 is a view of the stator board 27 of the work machine 1 as viewed from the left.
- FIG. 2 is a circuit block diagram of the work machine 1.
- 8A is a circuit diagram of the motor connection circuit 46 in Fig. 7.
- FIG. 8B is a circuit diagram showing the motor connection circuit 46 in Fig. 7 divided into a stator 45 side and a stator board 27 side.
- FIG. 4 is an explanatory diagram of the winding process of the stator 45.
- 9 is a circuit diagram showing a current supply circuit to each coil of relays RY1 to RY5 shown in FIG. 8 and a connection relationship by a first conductive pattern 91 to a sixth conductive pattern 96 on a stator board 27.
- FIG. 4 is a component layout diagram of the left surface of the stator board 27.
- FIG. 2 is a parts layout diagram of the right surface of a stator board 27, seen from the left side through the stator board 27.
- FIG. 4 is an explanatory diagram of the wiring pattern of the first layer of the stator substrate 27.
- FIG. 4 is an explanatory diagram of the wiring pattern of the second layer of the stator board 27.
- FIG. 4 is an explanatory diagram of the wiring pattern of the third layer of the stator board 27.
- FIG. 4 is an explanatory diagram of the wiring pattern of the fourth layer of the stator board 27.
- FIG. 11 is a simplified circuit block diagram of the work machine 1 in the case where the 36V step-down circuit 82 and the 24V step-down circuit 83 shown in FIG. 10 are provided on the inverter board 23 in the first embodiment.
- FIG. 11 is a simplified circuit block diagram in the case where the 36V step-down circuit 82 and the 24V step-down circuit 83 shown in FIG. 10 are provided on a stator board 27 in the second embodiment.
- FIG. 11 is a circuit diagram showing a current-carrying circuit for each coil of relays RY1 to RY5 and a connection relationship by a first conductive pattern 101 to a sixth conductive pattern 106 on a stator board 127 in the third embodiment.
- FIG. 13 is a component layout diagram of the left surface of the stator board 127.
- FIG. 13 is a component layout diagram of the right surface of a stator board 127, seen from the left side through a stator board 27.
- FIG. 4 is an explanatory diagram of the wiring pattern of the first layer of the stator substrate 127.
- FIG. 4 is an explanatory diagram of the wiring pattern of the second layer of the stator board 127.
- FIG. 4 is an explanatory diagram of the wiring pattern of the third layer of the stator board 127.
- FIG. 4 is an explanatory diagram of the wiring pattern of the fourth layer of the stator board 127.
- FIG. 13 is a circuit diagram showing a current supply circuit for each coil of relays RY1 to RY5 in a fourth embodiment.
- FIG. 13 is a circuit diagram showing a current supply circuit for each coil of relays RY1 to RY5 in a fifth embodiment.
- FIG. 13 is a circuit diagram of a motor connection circuit according to a sixth embodiment.
- 13A is an explanatory diagram of the arrangement of a stator coil in the seventh embodiment
- FIG. 13B is an explanatory diagram of a wiring pattern of a stator substrate 427 in the seventh embodiment.
- FIG. 23 is a circuit diagram showing a current-carrying circuit for each coil of relays RY1 to RY5 and a connection relationship by a first conductive pattern 201 to a sixth conductive pattern 206 on a stator board 527 in the eighth embodiment.
- 13A is an explanatory diagram of the arrangement of a stator coil in the eighth embodiment
- FIG. 13B is an explanatory diagram of a wiring pattern of a stator substrate 527 in the eighth embodiment.
- Figures 1 to 17 relate to a work machine 1 according to embodiment 1 of the present invention.
- Figures 1 and 2(A) define the mutually orthogonal front-rear, up-down, and left-right directions of the work machine 1.
- the work machine 1 is a bench cutting machine (bench circular saw).
- the working machine 1 has a base 2, a turntable 3, and a fence 4.
- the base 2 and the turntable 3 form a base section.
- the base 2 is placed on a workbench or the like.
- the turntable 3 is embedded in the center of the base 2 and can rotate relative to the base 2 by a rotation axis parallel to the vertical direction.
- the upper surface of the turntable 3 serves as a placement surface (base surface) on which the workpiece, such as wood, is placed.
- the upper surfaces of the base 2 and the turntable 3 are approximately flush with each other.
- the fence 4 is provided on the upper surface of the base 2. Stable cutting work is possible by abutting the workpiece against the fence 4.
- the work machine 1 has a holder 5.
- the holder 5 is connected to the rear end of the turntable 3 via a tilt shaft 6 and rises upward from the rear end of the turntable 3.
- the tilt shaft 6 is a shaft that is approximately parallel to the top surface of the turntable 3 and parallel to the side of the cutting blade 20.
- the axis of the tilt shaft 6 and the top surface of the turntable 3 are at approximately the same position in the vertical direction.
- the holder 5 can be tilted at a predetermined angle, for example, within a range of 45 degrees, to at least one of the left and right sides with respect to the turntable 3, centered on the tilt shaft 6.
- the tilted position of the holder 5 can be fixed and released by a clamp lever (not shown).
- the work machine 1 has a cutting unit 10.
- the cutting unit 10 is connected to the upper part of the holder 5 via a swing shaft 9 and extends in an upward and forward direction.
- the swing shaft 9 is a shaft that is approximately parallel to the rotation axis of the cutting blade 20.
- the cutting unit 10 can swing up and down around the swing shaft 9.
- a spring (not shown) that urges the cutting unit 10 upward relative to the holder 5 is provided around the swing shaft 9.
- Figure 1 shows the cutting unit 10 in the upper swing limit position.
- the cutting unit 10 is connected to the holder 5 via a slide rail (not shown) and can slide in the forward and backward directions relative to the holder 5 with the support of the slide rail.
- the cutting section 10 has a gear case (saw cover) 11 and a housing 12.
- the gear case 11 is made of a metal such as aluminum.
- the gear case 11 covers the upper outer periphery of the cutting blade 20.
- the housing 12 is, for example, a resin molded body, and is connected to the gear case 11 and located to the left of the gear case 11.
- the housing 12 has a handle housing 13 and a motor accommodating section 17.
- a trigger switch 14 (drive operation unit) is provided in the grip portion of the handle housing 13, which allows the operator to start and stop the motor 30.
- the rear of the motor housing portion 17 is a battery pack attachment portion 16, to which a battery pack 15 can be detachably attached.
- the work machine 1 runs on power from the battery pack 15.
- the motor housing portion 17 is formed by combining a motor housing 21 and a cover 22 with screws or the like.
- the motor housing 21 is an undivided cylinder whose central axis is parallel to the left-right direction.
- a cover 22 covers the opening on the left side of the motor housing 21.
- the motor housing 21 houses the motor 30 and the stator board 27.
- An air intake 18 (air window) is provided on the left side of the cover 22 to take in cooling air generated by the fan 50 described below.
- the cutting unit 10 has a motor 30.
- the motor 30 is a 4-pole, 6-slot brushless motor.
- the motor 30 has a motor shaft 31, a rotor core 32, a rotor magnet 33, a stator core 34, a left insulator 35, a right insulator 36, and a stator coil 37 (windings).
- the motor shaft 31 extends perpendicular to the side of the cutting blade 20.
- the left part of the motor shaft 31 is supported by the left bearing 26.
- the left bearing 26 is held in the bearing holder 25 of the motor housing 21.
- the right part of the motor shaft 31 is supported by the right bearing 51.
- the rotor core 32 is generally cylindrical and is disposed around the motor shaft 31, rotating integrally with the motor shaft 31.
- the rotor magnet 33 is inserted and held in the rotor core 32.
- Four rotor magnets 33 are disposed around the rotor core 32, for example, at 90 degree intervals.
- a sensor magnet 42 is disposed on the left end surface of the rotor core 32.
- the magnetic pole faces of the sensor magnet 42 are the surface facing the rotor core 32 and the surface opposite it.
- the magnetic field generated by the sensor magnet 42 is detected by the Hall IC 29 described below.
- the rotor core 32, the rotor magnet 33, and the sensor magnet 42 constitute the rotor of the motor 30.
- the stator core 34 is held in the motor housing 21. As shown in FIG. 9, the stator core 34 has a yoke portion 62 and teeth portion 63.
- the yoke portion 62 is a tubular portion (cylindrical portion) that coaxially surrounds the rotor core 32.
- the teeth portion 63 protrude radially inward from the yoke portion 62.
- Six teeth portions 63 are provided around the stator core 34, for example, at intervals of 60 degrees.
- a stator coil 37 is wound around each of the teeth portions 63. There are two stator coils 37 for each of the U-phase, V-phase, and W-phase. In FIG. 8(A), (B), and FIG. 9, the stator coils 37 are distinguished as U-phase stator coils U1 and U2, V-phase stator coils V1 and V2, and W-phase stator coils W1 and W2.
- the left insulator 35 is, for example, a resin molded body, and is provided to the left of the stator core 34 and is interposed between the stator coil 37 and the stator core 34. As shown in FIG. 4, the left insulator 35 guides a crossover wire 40 that connects the stator coils 37 of the same phase to the left of the stator core 34 in the circumferential direction of the motor shaft 31. The left insulator 35 holds a connect plate 41, which will be described later.
- the right insulator 36 is, for example, a resin molded body, and is provided to the right of the stator core 34 and is interposed between the stator coil 37 and the stator core 34.
- the stator core 34, the left insulator 35, the right insulator 36, the stator coil 37, and the connect plate 41 constitute the stator (stator) of the motor 30.
- the rotation of the motor 30, i.e., the rotation of the motor shaft 31, is transmitted forward by the winding transmission mechanism 52, and is then decelerated by the reduction mechanism 53 before being transmitted to the cutting blade 20.
- the cutting section 10 has a stator board 27 (sensor board) as a second board.
- the stator board 27 is fixed to the left end of the left insulator 35 by, for example, three screws 38 in an orientation perpendicular to the motor shaft 31. That is, the stator board 27 is disposed at one end of the stator in the axial direction of the motor 30.
- the stator board 27 is approximately disc-shaped with a smaller diameter than the stator of the motor 30.
- the five relays 28 are provided on the left surface of the stator board 27.
- the five relays are identified as relays RY1 to RY5.
- the relays 28 are configured to be turned on by passing a current through a relay coil 56 wound around an iron core 55 as a magnetic core, thereby bringing a movable contact 59 into contact with a fixed contact 60.
- the relays 28 are of a through-hole mounting type. That is, the terminals of the relays 28 penetrate the through-holes of the stator board 27 and are electrically connected to the stator board 27 by soldering or the like.
- a Hall IC 29 serving as a magnetic sensor is provided on the right side of the stator board 27, i.e., the side of the stator board 27 opposite the side on which the relay 28 is mounted.
- the Hall IC 29 is located inside the relay 28 in the radial direction of the motor shaft 31.
- Figure 6 shows the left side of the stator board 27, but the Hall IC 29 provided on the right side of the stator board 27 is indicated by a dashed line.
- Three Hall ICs 29 are provided at 60 degree intervals around the circumference of the motor shaft 31.
- the electrical connection between the stator board 27 and the stator coil 37 is made by a metal connect plate 41 shown in Figures 3, 4, and 6.
- the connect plate 41 is, for example, a fusing terminal.
- the connect plate 41 is held on the left insulator 35, for example, by integral molding.
- Six connect plates 41 are provided, for example, at 60 degree intervals in the circumferential direction of the motor shaft 31.
- each connect plate 41 is shown in an open state before the stator coil 37 is wound or hooked and clamped.
- the jumper wire 40 that connects the stator coils 37 of the same phase and the end of the stator coil 37 are wound or hooked on each connect plate 41.
- Each connect plate 41 is electrically connected to the stator board 27 in a closed state as shown in Figure 4.
- the six connect plates 41 are identified as connect plates 41U1, 41U2, 41V1, 41V2, 41W1, and 41W2, corresponding to the phases of the stator coil 37.
- the cutting section 10 has an inverter board 23 (main board) as a first board and a board case 24 that houses and holds it.
- the board case 24 is located to the left of the bearing holding section 25.
- the inverter board 23 is held in the board case 24 to the left of the bearing holding section 25 in a position perpendicular to the motor shaft 31.
- the inverter board 23 and the board case 24 are located to the left of the motor housing 21 and have a dimension larger than the left opening of the motor housing 21 when viewed in the axial direction of the motor shaft 31.
- a switching element 49 for passing current to the stator coil 37 is provided on the left side of the inverter board 23.
- the switching element 49 corresponds to switching elements Q1 to Q6 such as FETs that constitute the inverter circuit 47 shown in Figure 7. Note that the switching element 49 is omitted from the illustration in Figure 3.
- the inverter board 23 is also equipped with circuit components such as a microcontroller that constitutes the calculation unit 80 shown in Figure 7, but these circuit components are omitted from the illustration in Figure 3.
- the inverter board 23 and the stator board 27 are electrically connected by the U-phase power line 43U, V-phase power line 43V, and W-phase power line 43W shown in FIG. 6.
- the U-phase power line 43U extends from the interconnection of the switching elements Q1 and Q4 shown in FIG. 7 on the inverter board 23 and is electrically connected to the stator board 27.
- the V-phase power line 43V extends from the interconnection of the switching elements Q2 and Q5 shown in FIG. 7 on the inverter board 23 and is electrically connected to the stator board 27.
- the W-phase power line 43W extends from the interconnection of the switching elements Q3 and Q6 shown in FIG. 7 on the inverter board 23 and is electrically connected to the stator board 27.
- the cutting section 10 has a fan 50.
- the fan 50 is a centrifugal fan that is provided on the motor shaft 31 to the right of the stator core 34 and rotates together with the motor shaft 31.
- the flow of the cooling air generated by the fan 50 is shown by arrows in FIG. 2(A).
- the cooling air enters the cover 22 from the intake port 18 of the cover 22, cools the inverter board 23 and the switching element 49, then turns around to the right of the inverter board 23 to cool the stator board 27 and the relay 28, and further cools the motor 30 before being sucked into the fan 50. That is, the relay 28 is located downstream of the cooling air from the switching element 49.
- FIG. 7 is a circuit block diagram of the work machine 1.
- Figures 8(A) and (B) show a specific configuration of the motor connection circuit 46 in Figure 7.
- the motor connection circuit 46 includes U-phase stator coils U1 and U2, V-phase stator coils V1 and V2, W-phase stator coils W1 and W2, and relays RY1 to RY5.
- the relays RY1 to RY5 are connection switching units that switch the connections (hereinafter “stator coil connections") of the U-phase stator coils U1 and U2, the V-phase stator coils V1 and V2, and the W-phase stator coils W1 and W2 between a delta connection and a star connection (Y connection), and are examples of second switch units.
- the nominal heat resistance temperatures (hereinafter “relay heat resistance temperatures”) of the relays RY1 to RY5 are higher than the nominal heat resistance temperatures (hereinafter “FET heat resistance temperatures”) of the switching elements Q1 to Q6 of the inverter circuit 47.
- stator coil wiring When the stator coil wiring is a delta connection as the first connection, relays RY1 to RY3 are on (conducting state) and relays RY4 and RY5 are off (disconnecting state).
- stator coil wiring When the stator coil wiring is a star connection as the second connection, relays RY1 to RY3 are off (disconnecting state) and relays RY4 and RY5 are on (conducting state).
- Relays RY1 to RY3 are relays for delta connection and are examples of the first connection.
- Relays RY4 and RY5 are relays for star connection and are examples of the second connection.
- the inverter circuit 47 is a drive unit that converts the direct current output by the battery pack 15 into alternating current and supplies it to the motor connection circuit 46 to drive the motor 30.
- the inverter circuit 47 includes switching elements Q1 to Q6, such as FETs and IGBTs, connected in a three-phase bridge.
- the switching elements Q1 to Q6 are examples of a first switch unit.
- the resistor 48 is provided in the path of the current (hereinafter "motor current") flowing through the motor connection circuit 46.
- the current detection circuit 71 detects the motor current by the voltage drop at the resistor 48 and transmits it to the calculation unit 80.
- the voltage detection circuit 72 detects the output voltage of the battery pack 15 (hereinafter “battery voltage”) and transmits it to the calculation unit 80.
- the operation amount detection circuit 73 detects the on/off and operation amount of the trigger switch 14 and transmits it to the calculation unit 80.
- Thermistor 75 which serves as a temperature detection element, is provided on inverter board 23 and is located near one of switching elements Q1 to Q6, and outputs a signal corresponding to the temperature of that switching element (hereinafter "FET temperature"). Temperature detection circuit 74 detects the temperature of that switching element from the signal of thermistor 75 and sends it to calculation unit 80. Note that switching elements Q1 to Q6 are identical elements and have the same on-resistance, heat resistance temperature, etc., and therefore experience substantially the same temperature changes. For this reason, it is sufficient to monitor the temperature change of one of switching elements Q1 to Q6.
- the rotor position detection circuit 76 detects the rotor rotation position of the motor 30 using the output signal of the Hall IC 29 and sends it to the calculation unit 80.
- the rotation speed detection circuit 77 detects the rotation speed of the motor 30 (hereinafter "motor rotation speed") using the output signal of the rotor position detection circuit 76 and sends it to the calculation unit 80.
- the relay drive circuit 78 controls the on/off of the relay 28 (relays RY1 to RY5) according to the control of the calculation unit 80.
- the control signal output circuit 79 controls the on/off of the switching elements Q1 to Q6 of the inverter circuit 47 according to the control of the calculation unit 80.
- the calculation unit 80 is a control unit that controls the overall operation of the work machine 1.
- the calculation unit 80 monitors the motor current, battery voltage, on/off and operation amount of the trigger switch 14, FET temperature, rotor rotation position, and motor rotation speed, and controls the drive of the inverter circuit 47 (PWM control) via the control signal output circuit 79 in response to the operation of the trigger switch 14, thereby controlling the drive of the motor 30.
- the calculation unit 80 has an overload protection function (overcurrent protection function) that turns off all switching elements Q1 to Q6 and stops the power supply to the motor 30 when the motor current satisfies an overload protection activation condition (overcurrent protection activation condition) even if the trigger switch 14 is on.
- the overload protection activation condition is, for example, when the motor current is equal to or greater than the overload protection threshold (overcurrent protection threshold).
- the calculation unit 80 has a high temperature protection activation function that turns off all switching elements Q1 to Q6 and stops the power supply to the motor 30 when the FET temperature meets the high temperature protection activation condition, even if the trigger switch 14 is on.
- the high temperature protection activation condition is, for example, that the FET temperature is equal to or higher than a predetermined temperature (high temperature protection threshold).
- turning off all switching elements Q1 to Q6 to stop the power supply to the motor 30 is an example of controlling so that no current flows through relays RY1 to RY5 (power supply to relays RY1 to RY5 is cut off).
- the calculation unit 80 may turn off all relays RY1 to RY5.
- the FET temperature and the temperatures of the relays RY1 to RY5 rise. For this reason, it is possible to perform both control by monitoring the FET temperature so that the FET temperature does not exceed the FET heat resistance temperature, and control by monitoring the relay temperature so that the relay temperature does not exceed the relay heat resistance temperature.
- a thermistor 75 for monitoring the FET temperature and a thermistor for monitoring the relay temperature separately could result in increased costs, an increase in the size of the stator board 27 for mounting the thermistor, and ultimately an increase in the size of the work machine 1.
- the work machine 1 is therefore configured so that the FET temperature satisfies the high temperature protection activation condition before the relay temperature reaches the relay heat resistance temperature.
- the relay temperature is configured to be lower than the relay heat resistance temperature.
- the work machine 1 does not have a dedicated thermistor for monitoring the relay temperature, and the calculation unit 80 indirectly controls the relay temperature so that it does not exceed the relay heat resistance temperature by controlling the FET temperature so that it does not exceed the FET heat resistance temperature.
- FIGs 8(A) and (B) the U-phase stator coils U1 and U2 are connected in parallel to each other, the V-phase stator coils V1 and V2 are connected in parallel to each other, and the W-phase stator coils W1 and W2 are connected in parallel to each other.
- Figure 8(B) shows that the parallel connection (parallel wiring) of the stator coils of each phase is completed on the stator 45 side, that is, it is established without relying on the conductive pattern (wiring pattern) of the stator board 27. This allows for only six connect plates 41 and prevents the conductive pattern of the stator board 27 from becoming too complicated.
- FIG 9 is an explanatory diagram of the winding process of the stator 45.
- the beginning of the winding of the wire that will become the stator coil is entangled with the connect plate 41U2, the stator coil U2 is wound, and then it is pulled 180 degrees clockwise in Figure 9 and hooked onto the connect plate 41U1, the stator coil U1 is wound, and then it is pulled 180 degrees clockwise in Figure 9 and hooked onto the connect plate 41U2.
- the above winding process can be performed by an automatic winding machine (not shown).
- unnecessary portions of the wire portions indicated by two-dot chain lines in FIG. 9
- the portion passing between connect plates 41U2 and 41W1 and the portion passing between connect plates 41W1 and 41V2 are cut and removed. This completes the connection shown within the dashed lines of stator 45 in FIG. 8(B).
- the jumper wire 40 and each connect plate 41 that connect stator coils of the same phase are examples of common connections. In the above winding process, there is no particular restriction as to which stator coil to start winding from.
- Figure 10 is a circuit diagram showing the current supply circuits to each coil of relays RY1 to RY5 shown in Figure 8, and the connection relationships of the first conductive pattern 91 to the sixth conductive pattern 96 on the stator board 27.
- the inverter board 23 is provided with a power supply 81 for the control circuit, a 36V step-down circuit 82 as a first step-down circuit, and a 24V step-down circuit 83 as a second step-down circuit.
- the power supply 81 for the control circuit generates 5V DC from the battery voltage and supplies it as a power supply voltage to the calculation unit 80 shown in FIG. 7 and the like, as well as to the stator board 27.
- the battery voltage is 40V as an example here.
- the battery voltage is an example of a power supply voltage supplied from outside.
- the 36V step-down circuit 82 steps down the battery voltage to 36V DC and supplies it to each coil of the relays RY1 to RY3. Between the output terminal of the 36V step-down circuit 82 and the ground, the coils of the relays RY1 to RY3 and the delta side relay switching circuit 85 are connected in series. The on/off of the delta side relay switching circuit 85 is controlled by a relay operation signal from the calculation unit 80 shown in FIG. 7. When the delta side relay switching circuit 85 is on (conductive state), a voltage of 12V is applied to each of the coils of the relays RY1 to RY3, and each of the relays RY1 to RY3 is on (conductive state).
- the coil rated voltage (the optimal value of the voltage applied to the coil to turn on the relay) of each of the relays RY1 to RY3 is 12V.
- the delta side relay switching circuit 85 is provided on the stator board 27 and constitutes a part of the relay drive circuit 78 shown in FIG. 7.
- the 24V step-down circuit 83 steps down the battery voltage to 24V DC and supplies it to each coil of the relays RY4 to RY5.
- the step-down rate of the 24V step-down circuit 83 (40V to 24V) is higher than the step-down rate of the 36V step-down circuit 82 (40V to 36V).
- the coils of the relays RY4 to RY5 and the star side relay switching circuit 86 (Y side relay switching circuit) are connected in series between the output terminal of the 24V step-down circuit 83 and ground.
- the on/off of the star side relay switching circuit 86 is controlled by a relay operation signal from the calculation unit 80 shown in FIG. 7.
- the star side relay switching circuit 86 When the star side relay switching circuit 86 is on (conductive state), a voltage of 12V is applied to the coils of the relays RY4 to RY5, and the relays RY4 to RY5 are on (conductive state).
- the rated coil voltage of the relays RY4 to RY5 is 12V.
- the star side relay switching circuit 86 is provided on the stator board 27 and constitutes part of the relay drive circuit 78 shown in FIG. 7.
- the Hall IC signal detection circuit 84 is a circuit that outputs signals from the three Hall ICs 29 shown in Figure 7 to the inverter board 23.
- the stator substrate 27 is provided with a ground pattern 87 and a first conductive pattern 91 to a sixth conductive pattern 96, which are patterns through which a large current flows.
- the ground pattern 87 and the first conductive pattern 91 to the sixth conductive pattern 96 are indicated by hatching.
- the ground pattern 87 and the first conductive pattern 91 to the sixth conductive pattern 96 are conductive patterns for large currents.
- the first conductive pattern 91 electrically connects the U-phase power line connection portion 67U to which the U-phase power line 43U is connected, one end of the relay RY1, and the connect plate 41U1.
- the second conductive pattern 92 electrically connects the V-phase power line connection portion 67V to which the V-phase power line 43V is connected, one end of the relay RY2, and the connect plate 41V1.
- the third conductive pattern 93 electrically connects the W-phase power line connection portion 67W to which the W-phase power line 43W is connected, one end of the relay RY3, and the connect plate 41W1.
- the fourth conductive pattern 94 electrically connects the other end of relay RY1, the connect plate 41W2, and one end of relay RY5 to each other.
- the fifth conductive pattern 95 electrically connects the other end of relay RY2, the connect plate 41U2, and one end of relay RY4 to each other.
- the sixth conductive pattern 96 electrically connects the other end of each of the relays RY3 to RY5 to the connect plate 41V2.
- the ground pattern 87 and the first conductive pattern 91 to the sixth conductive pattern 96 are provided across the first layer (left surface), second layer, third layer, and fourth layer (right surface) which are conductive layers of the stator board 27, overlap each other via insulating layers, and are electrically connected to each other via through holes.
- the pattern shapes (shapes when viewed from a direction perpendicular to the stator board 27) of the ground pattern 87 and the first conductive pattern 91 to the sixth conductive pattern 96 are the same in the first to third layers and overlap each other.
- some of the conductive patterns are reduced compared to the first to third layers due to the provision of conductive patterns for signals.
- Figure 11 shows the component layout on the left side of the stator board 27.
- the U-phase power line connection portion 67U, the V-phase power line connection portion 67V, and the W-phase power line connection portion 67W are spaced apart from each other in the circumferential direction of the motor 30.
- relay RY1 is located between the U-phase power line connection part 67U and the V-phase power line connection part 67V
- relays RY2 and RY4 are located between the V-phase power line connection part 67V and the W-phase power line connection part 67W
- relays RY3 and RY5 are located between the W-phase power line connection part 67W and the U-phase power line connection part 67U.
- at least one of relays RY1 to RY5 is located between the U-phase power line connection part 67U, the V-phase power line connection part 67V, and the W-phase power line connection part 67W.
- Relay RY2, relay RY4, relay RY3, relay RY5, and relay RY1 are arranged in this order in the circumferential direction of the motor 30.
- relays RY1 to RY3, which are delta-connected relays, and relays RY4 to RY5, which are star-connected relays, are arranged alternately in the circumferential direction of the motor 30.
- the longitudinal direction of relays RY1 and RY3 is approximately parallel to the radial direction of motor 30.
- the longitudinal direction of relays RY2, RY4 to RY5 is approximately parallel to the circumferential direction of motor 30.
- relays RY1 and RY5 are adjacent to each other, relays RY3 and RY4 are adjacent to each other, and relays RY3 and RY5 are adjacent to each other.
- a relay whose longitudinal direction is approximately parallel to the radial direction of motor 30 and a relay whose longitudinal direction is approximately parallel to the circumferential direction of motor 30 are adjacent to each other in the circumferential direction of motor 30.
- Figure 12 is a parts layout diagram on the right side of the stator board 27, seen from the left through the stator board 27.
- Three Hall ICs 29 are lined up in the circumferential direction of the motor 30.
- the two Hall ICs 29 are within the range of relays RY2 and RY4, respectively, in the circumferential direction of the motor 30, and are located inside relays RY2 and RY4 in the radial direction of the motor 30.
- Figure 17 is a simplified circuit block diagram of the work machine 1 when the 36V step-down circuit 82 and the 24V step-down circuit 83 shown in Figure 10 are provided on the inverter board 23.
- the 36V step-down circuit 82 and the 24V step-down circuit 83 are provided on the inverter board 23.
- no space is required on the stator board 27 for providing the 36V step-down circuit 82 and the 24V step-down circuit 83, so the area of the ground pattern 87 and the first conductive pattern 91 to the sixth conductive pattern 96 can be increased (pattern width can be increased), and the allowable current value can be increased.
- Relays RY1 to RY5 that switch the stator coil connection between a delta connection as the first connection and a star connection are provided on the stator board 27, and the stator board 27 is disposed at one end of the stator in the axial direction of the motor 30. Therefore, a work machine 1 can be provided in which the stator board 27 provided with relays RY1 to RY5 that switch between a delta connection and a star connection is disposed in an appropriate location.
- the U-phase power line connection portion 67U, the V-phase power line connection portion 67V, and the W-phase power line connection portion 67W are arranged at a distance from each other in the circumferential direction of the motor 30, and the relay RY1 is located between the U-phase power line connection portion 67U and the V-phase power line connection portion 67V, the relays RY2 and RY4 are located between the V-phase power line connection portion 67V and the W-phase power line connection portion 67W, and the relays RY3 and RY5 are located between the W-phase power line connection portion 67W and the U-phase power line connection portion 67U.
- each of the U-phase power line connection portion 67U, the V-phase power line connection portion 67V, and the W-phase power line connection portion 67W is located close to the relay to which it is connected, among the relays RY1 to RY5. Therefore, the ground pattern 87 and each of the first conductive pattern 91 to the sixth conductive pattern 96 can be stacked in the same shape across the first to third layers of the stator board 27 and electrically connected to each other.
- the effective pattern width (the product of the pattern width of each layer and the number of layers) of the ground pattern 87 and the first conductive pattern 91 to the sixth conductive pattern 96 through which a large current flows can be increased while mounting the relays RY1 to RY5.
- the coils of relays RY1 to RY3 are connected in series with each other and receive power from a 36V step-down circuit 82.
- the coils of relays RY4 to RY5 are connected in series with each other and receive power from a 24V step-down circuit 83.
- the step-down range of the 36V step-down circuit 82 and the 24V step-down circuit 83 is smaller than that of a step-down circuit that steps down the battery voltage to 12V, which is the rated coil voltage of one relay. This reduces power consumption and heat generation due to step-down, and allows the 36V step-down circuit 82 and the 24V step-down circuit 83 to be made smaller in size.
- Relays RY1 to RY5 are arranged so that relays whose longitudinal direction is approximately parallel to the radial direction of the motor 30 and relays whose longitudinal direction is approximately parallel to the circumferential direction of the motor 30 are adjacent to each other in the circumferential direction of the motor 30. This makes it easier to lay out the conductive patterns and through holes for screw fastening on the stator board 27 compared to when the longitudinal directions of all relays are parallel to the circumferential direction of the motor 30, parallel to the radial direction of the motor 30, or parallel to each other.
- the 36V step-down circuit 82 and the 24V step-down circuit 83 are provided on the inverter board 23. Therefore, no space is required on the stator board 27 for providing the 36V step-down circuit 82 and the 24V step-down circuit 83. This makes it possible to increase the area of the ground pattern 87 and the first conductive pattern 91 to the sixth conductive pattern 96 provided on the stator board 27 (increase the pattern width), thereby reducing power loss and increasing the allowable current value.
- the connection between the stator coils in each parallel connection is configured by the conductive patterns of the stator board 27, the number of connect plates 41 is reduced, the complexity of the conductive patterns of the stator board 27 is suppressed, and the conductive patterns through which large currents flow are reduced. This makes the stator board 27 smaller, suppressing increases in cost and size of the product.
- the interconnection between the U-phase parallel connection, V-phase parallel connection, and W-phase parallel connection i.e., the stator coil wiring, is not fixed on the stator 45 side, so the stator coil wiring can be dynamically switched by relays RY1 to RY5 provided on the stator board 27.
- the stator winding process is highly efficient, since all slots are wound at once and then unnecessary parts are cut off.
- the connect plate 41 allows the same-phase stator coils to be connected to each other while also providing electrical connection to the stator board 27, which helps prevent an increase in the number of parts and simplifies the structure.
- the switching element 49 is disposed upstream of the relay 28 in the flow of cooling air. This allows the cooling air that cools the relay 28 to cool the switching element 49, which generates a large amount of heat, before its temperature rises, and effectively suppresses the rise in the FET temperature.
- the motor housing 21 that holds the stator core 34 is a single (non-divided) member. Therefore, compared to when the motor housing 21 has a two-piece structure, for example, the coaxial accuracy between the bearing holder 25 of the motor housing 21 and the stator core 34 is improved, and the coaxial accuracy between the motor shaft 31 and the stator core 34 is also improved.
- FIG. 18 is a simplified circuit block diagram of embodiment 2 in which the 36V step-down circuit 82 and the 24V step-down circuit 83 shown in FIG. 10 are provided on the stator board 27.
- the 36V step-down circuit 82 and the 24V step-down circuit 83 are provided on the stator board 27, the circuits constituting the winding switching function are concentrated on the stator board 27, so that the stator board 27 can be easily deployed in multiple models as a board that concentrates the winding switching function (the versatility of the stator board 27 is improved).
- the wiring between the stator board 27 and the inverter board 23 can be reduced.
- Other points of this embodiment are the same as those of embodiment 1, and the same effects as those of embodiment 1 are achieved.
- Figure 19 is a circuit diagram showing the current supply circuits to the coils of relays RY1 to RY5 in embodiment 3, and the connection relationships between the first conductive pattern 101 to the sixth conductive pattern 106 on the stator board 127.
- the stator substrate 127 is provided with the first conductive pattern 101 to the sixth conductive pattern 106 and the ground pattern 107, which are patterns through which a large current flows.
- the first conductive pattern 101 to the sixth conductive pattern 106 and the ground pattern 107 are indicated by hatching.
- the first conductive pattern 101 electrically connects the U-phase power line connection portion 67U to which the U-phase power line 43U is connected, one end of the relay RY1, and the connect plate 41U1.
- the second conductive pattern 102 electrically connects the V-phase power line connection portion 67V to which the V-phase power line 43V is connected, one end of the relay RY2, and the connect plate 41V1.
- the third conductive pattern 103 electrically connects the W-phase power line connection portion 67W to which the W-phase power line 43W is connected, one end of the relay RY3, and the connect plate 41W1.
- the fourth conductive pattern 104 electrically connects the other ends of the relays RY1, RY4, and RY5 to the connect plate 41W2.
- the fifth conductive pattern 105 electrically connects the other end of relay RY2, the connect plate 41U2, and one end of relay RY4 to each other.
- the sixth conductive pattern 106 electrically connects the other end of relay RY3, the connect plate 41V2, and one end of relay RY5 to each other.
- the first conductive pattern 101 and the third conductive pattern 103 are provided on the first layer (left surface) of the stator substrate 127.
- the second conductive pattern 102, the fourth conductive pattern 104, the fifth conductive pattern 105, and the sixth conductive pattern 106 are provided on the second layer of the stator substrate 127.
- the first conductive pattern 101 of the first layer and the fourth conductive pattern 104 of the second layer partially overlap with each other with an insulating layer in between.
- the third conductive pattern 103 of the first layer and the second conductive pattern 102, the fourth conductive pattern 104, and the sixth conductive pattern 106 of the second layer partially overlap with each other with an insulating layer in between.
- the ground patterns 107 are provided across the first to fourth layers of the stator board 127, and are electrically connected to each other by through holes where they overlap with an insulating layer in between. As shown in Figure 24, the third layer is entirely made up of the ground pattern 107, except for areas that require insulation from the ground pattern 107. As shown in Figure 25, in addition to the ground pattern 107, a conductive pattern for signals is provided on the fourth layer.
- Figure 20 shows the component layout on the left side of the stator board 127.
- the U-phase power line connection portion 67U, the V-phase power line connection portion 67V, and the W-phase power line connection portion 67W are arranged close to each other in the circumferential direction of the motor 30.
- Relay RY2, relay RY4, relay RY5, relay RY3, and relay RY1 are arranged in order in the circumferential direction of the motor 30, and the U-phase power line connection portion 67U, the V-phase power line connection portion 67V, and the W-phase power line connection portion 67W are located between relays RY1 and RY2.
- Relays RY1 to RY3 are arranged in positions close to the U-phase power line connection portion 67U, the V-phase power line connection portion 67V, and the W-phase power line connection portion 67W in the circumferential direction of the motor 30, and relays RY4 and RY5 are arranged in positions away from the U-phase power line connection portion 67U, the V-phase power line connection portion 67V, and the W-phase power line connection portion 67W.
- the relative positions of relays RY1 to RY3 and relays RY4 and RY5 with respect to the U-phase power line connection portion 67U, the V-phase power line connection portion 67V, and the W-phase power line connection portion 67W may be reversed.
- the longitudinal direction of relays RY1 to RY3, and RY5 is approximately parallel to the circumferential direction of motor 30.
- the longitudinal direction of relay RY4 is approximately parallel to the radial direction of motor 30.
- relays RY2 and RY4 are adjacent to each other, and relays RY4 and RY5 are adjacent to each other.
- a relay whose longitudinal direction is approximately parallel to the radial direction of motor 30 and a relay whose longitudinal direction is approximately parallel to the circumferential direction of motor 30 are adjacent to each other in the circumferential direction of motor 30.
- Figure 21 is a parts layout diagram on the right side of the stator board 127, seen from the left through the stator board 127.
- Three Hall ICs 29 are lined up in the circumferential direction of the motor 30.
- the two Hall ICs 29 are within the range of relays RY1 and RY2, respectively, in the circumferential direction of the motor 30, and are located inside relays RY1 and RY2 in the radial direction of the motor 30.
- the effective pattern width of the first conductive pattern 101 to the sixth conductive pattern 106 is smaller than the effective pattern width of the first conductive pattern 91 to the sixth conductive pattern 96 in the first embodiment.
- the U-phase power line connection portion 67U, the V-phase power line connection portion 67V, and the W-phase power line connection portion 67W are arranged close to each other in the circumferential direction of the motor 30, so that the U-phase power line 43U, the V-phase power line 43V, and the W-phase power line 43W are arranged in a consolidated layout.
- Figure 26 is a circuit diagram showing the current supply circuit for each coil of relays RY1 to RY5 in the fourth embodiment. The following will focus on the differences from the first embodiment.
- the inverter board 123 is the inverter board 23 of FIG. 10, with the 36V step-down circuit 82 replaced by a 12V step-down circuit 90.
- the 12V step-down circuit 90 steps down the battery voltage to 12V DC and supplies it to the coil of the relay RY1.
- the 24V step-down circuit 83 corresponds to the first step-down circuit
- the 12V step-down circuit 90 corresponds to the second step-down circuit.
- each coil of relays RY1 to RY5 has been changed in the stator board 227.
- the coil of relay RY1 and the delta side relay switching circuit 85 are connected in series.
- the coils of relays RY2 to RY3 and the delta side relay switching circuit 85 are connected in series, and the coils of relays RY4 to RY5 and the star side relay switching circuit 86 (Y side relay switching circuit) are connected in series in parallel with relays RY2, etc.
- relays RY2 to RY3 and relays RY4 to RY5 are not turned on at the same time, relays RY2 to RY3 and relays RY4 to RY5 share the 24V step-down circuit 83 as the power source for the coils.
- the 36V step-down circuit 82 of embodiment 1 has been replaced with a 12V step-down circuit 90, so although the step-down range is larger, it is possible to respond appropriately to a drop in battery voltage. That is, although the battery voltage fluctuates in the range of 30 to 40V depending on the remaining charge of the battery pack 15, the 12V step-down circuit 90 can output 12V even if the battery voltage drops below 36V, and can respond appropriately to a drop in battery voltage.
- the coils of relays RY2 to RY3 and the coils of relays RY4 to RY5 receive power from the common 24V step-down circuit 83, so an increase in the number of step-down circuits can be suppressed.
- this embodiment is similar to embodiment 1, and provides the same effects.
- FIG. 27 is a circuit diagram showing the current supply circuit for each coil of relays RY1 to RY5 in embodiment 5. The following will focus on the differences from embodiment 4.
- Inverter board 223 is the inverter board 123 in FIG. 26, with the 24V step-down circuit 83 replaced by 12V step-down circuits 98, 99.
- the 12V step-down circuits 98, 99 step down the battery voltage to 12V DC and supply it to the coils of relays RY2 to RY5.
- the 12V step-down circuits 98, 99 correspond to the first and second step-down circuits
- the 12V step-down circuit 90 corresponds to the third step-down circuit.
- the coil of relay RY2 and the delta side relay switching circuit 85 are connected in series between the output terminal of the 12V step-down circuit 98 and ground, and the coil of relay RY4 and the star side relay switching circuit 86 (Y side relay switching circuit) are connected in series in parallel with relay RY2, etc. Since relay RY2 and relay RY4 are not turned on at the same time, relay RY2 and relay RY4 share the 12V step-down circuit 98 as the power source for the coils.
- the coil of relay RY3 and the delta side relay switching circuit 85 are connected in series between the output terminal of the 12V step-down circuit 99 and ground, and the coil of relay RY5 and the star side relay switching circuit 86 (Y side relay switching circuit) are connected in series in parallel with relay RY3 etc. Since relay RY3 and relay RY5 are not turned on at the same time, relay RY3 and relay RY5 share the 12V step-down circuit 99 as the power source for the coils.
- the 24V step-down circuit 83 of embodiment 4 has been replaced with 12V step-down circuits 98 and 99, so the step-down range is larger and the number of step-down circuits is also increased, but this embodiment can be used effectively when using a battery pack with a low rated voltage as a power source, for example a battery pack with a rated voltage of 18V.
- Other aspects of this embodiment are the same as those of embodiment 4, and the same effects are achieved.
- FIGS 28(A) and (B) are circuit diagrams of the motor connection circuit in embodiment 6.
- Figure 28(A) shows the delta connection state
- Figure 28(B) shows the star connection state (Y connection).
- Relay RY6 is a C-contact relay and also functions as relays RY2 and RY4 in Figure 8(A) which are A-contact relays.
- Relay RY7 is a C-contact relay and also functions as relays RY1 and RY5 in Figure 8(A) which are A-contact relays.
- the total number of relays can be reduced by using C-contact relays.
- since only three relays are used only one 36V step-down circuit is required to supply power to the relay coil, and the step-down circuits can be reduced.
- Other points of this embodiment are the same as those of embodiment 1, and the same effects are achieved.
- Figure 29(A) is an explanatory diagram of the arrangement of U-phase stator coils U1 and U2, V-phase stator coils V1 and V2, and W-phase stator coils W1 and W2 in the seventh embodiment.
- Figure 29(B) is an explanatory diagram of the wiring pattern of the stator board 427 in the seventh embodiment. The following will focus on the differences from the first embodiment.
- the arrangement shown in FIG. 29(A) is obtained by swapping the positions of the V-phase stator coils V1 and V2 in the arrangement of embodiment 1 shown in FIG. 9.
- the stator coil arrangement shown in FIG. 29(A) even if the U-phase power line connection portion 67U, the V-phase power line connection portion 67V, and the W-phase power line connection portion 67W are arranged close to each other in the circumferential direction of the motor 30 as shown in FIG. 29(B), the first conductive pattern 91 to the sixth conductive pattern 96 can be arranged together in one layer as in embodiment 1.
- the first conductive pattern 91 to the sixth conductive pattern 96 can be stacked in the same shape across the first to third layers of the stator board 427 and electrically connected to each other, which reduces power loss in the stator board 427 and increases the allowable current value of the stator board 427.
- FIG. 29(B) the position of the connect plate 41W1 is separated from the end of the stator substrate 427, and the second conductive pattern 92 is passed between the connect plate 41W1 and the end of the stator substrate 427, ensuring an area for the second conductive pattern 92.
- Other points of this embodiment are the same as those of embodiment 1, and the same effects are achieved.
- FIG. 30 is a circuit diagram showing the current supply circuits to the coils of relays RY1 to RY5 in embodiment 8, and the connection relationships of the first conductive pattern 201 to the sixth conductive pattern 206 on the stator board 527.
- Figure 31(A) is an explanatory diagram of the arrangement of U-phase stator coils U1 to U3, V-phase stator coils V1 to V3, and W-phase stator coils W1 to W3 in embodiment 8.
- Figure 31(B) is an explanatory diagram of the wiring pattern of the stator board 527 in embodiment 8. The following will focus on the differences from embodiment 1.
- Embodiment 8 corresponds to a motor 30 of embodiment 1 with 9 slots.
- the first conductive pattern 201 electrically connects the U-phase power line connection portion 67U to which the U-phase power line 43U is connected, one end of the relay RY1, and the connect plate 41U1.
- the second conductive pattern 202 electrically connects the V-phase power line connection portion 67V to which the V-phase power line 43V is connected, one end of the relay RY2, and the connect plate 41V1.
- the third conductive pattern 203 electrically connects the W-phase power line connection portion 67W to which the W-phase power line 43W is connected, one end of the relay RY3, and the connect plate 41W1.
- the fourth conductive pattern 204 electrically connects the other end of relay RY1, one end of relay RY5, and the connect plate 41W3 to each other.
- the fifth conductive pattern 205 electrically connects the other ends of the relays RY2, RY4, and RY5 to the connect plate 41U3.
- the sixth conductive pattern 206 electrically connects the other end of relay RY3, the connect plate 41V3, and one end of relay RY4 to each other.
- the first conductive pattern 201 to the sixth conductive pattern 206 can be arranged together in one layer, as in embodiment 1. Therefore, as in embodiment 1, the first conductive pattern 201 to the sixth conductive pattern 206 can be stacked with the same shape across the first to third layers of the stator substrate 527 and electrically connected to each other, making it possible to reduce power loss in the stator substrate 527 and increase the allowable current value of the stator substrate 527. Other points of this embodiment are the same as those of embodiment 1, and the same effects are achieved.
- the number of poles of the rotor, the number of slots of the stator, the battery voltage, the output voltage of the step-down circuit, etc., given as specific numerical values in the embodiment do not limit the scope of the invention in any way and can be changed as desired to meet the required specifications.
- the motor 30 may be driven without a sensor. In other words, the Hall IC 29 may be omitted.
- the relays RY1 to RY5, which are A-contact relays, may be B-contact relays.
- the working machine of the present invention is not limited to a bench cutter, and may be another type of cutting machine such as a portable circular saw, or another type of working machine such as a grinder.
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2025510213A JPWO2024203180A1 (https=) | 2023-03-31 | 2024-03-08 | |
| CN202480009332.8A CN120603681A (zh) | 2023-03-31 | 2024-03-08 | 作业机 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023057500 | 2023-03-31 | ||
| JP2023-057500 | 2023-03-31 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024203180A1 true WO2024203180A1 (ja) | 2024-10-03 |
Family
ID=92904565
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2024/009136 Ceased WO2024203180A1 (ja) | 2023-03-31 | 2024-03-08 | 作業機 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JPWO2024203180A1 (https=) |
| CN (1) | CN120603681A (https=) |
| WO (1) | WO2024203180A1 (https=) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014096915A (ja) * | 2012-11-09 | 2014-05-22 | Hitachi Automotive Systems Ltd | 自動車用電動アクチュエータ |
| JP2016010848A (ja) * | 2014-06-30 | 2016-01-21 | 日立工機株式会社 | 電動工具 |
| JP2021171869A (ja) * | 2020-04-23 | 2021-11-01 | 工機ホールディングス株式会社 | 動力工具 |
| JP2023019272A (ja) * | 2021-07-29 | 2023-02-09 | 工機ホールディングス株式会社 | 作業機 |
-
2024
- 2024-03-08 CN CN202480009332.8A patent/CN120603681A/zh active Pending
- 2024-03-08 JP JP2025510213A patent/JPWO2024203180A1/ja active Pending
- 2024-03-08 WO PCT/JP2024/009136 patent/WO2024203180A1/ja not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014096915A (ja) * | 2012-11-09 | 2014-05-22 | Hitachi Automotive Systems Ltd | 自動車用電動アクチュエータ |
| JP2016010848A (ja) * | 2014-06-30 | 2016-01-21 | 日立工機株式会社 | 電動工具 |
| JP2021171869A (ja) * | 2020-04-23 | 2021-11-01 | 工機ホールディングス株式会社 | 動力工具 |
| JP2023019272A (ja) * | 2021-07-29 | 2023-02-09 | 工機ホールディングス株式会社 | 作業機 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN120603681A (zh) | 2025-09-05 |
| JPWO2024203180A1 (https=) | 2024-10-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3385035B1 (en) | Control and power module for driving a brushless motor in a power tool | |
| JP5472683B2 (ja) | 電動工具 | |
| JP4974054B2 (ja) | 電動工具 | |
| CN104875166B (zh) | 电动工具 | |
| JP7539106B2 (ja) | ブラシレスモータ及び電動工具 | |
| JP7519827B2 (ja) | 電動作業機 | |
| US20110154796A1 (en) | Electric hedge trimmer | |
| JP7728142B2 (ja) | 電動作業機 | |
| WO2021049124A1 (ja) | 電動作業機 | |
| JP2022185821A (ja) | 電動作業機 | |
| JP2022012822A (ja) | 電動作業機 | |
| JP2023031687A (ja) | 電動作業機 | |
| JP7537510B2 (ja) | 作業機 | |
| JP7818154B2 (ja) | 作業機 | |
| JP2019047605A (ja) | 電気機器 | |
| WO2024203180A1 (ja) | 作業機 | |
| JP6507773B2 (ja) | 手持ち電動工具 | |
| JP7437683B2 (ja) | ブラシレスモータ及び機器 | |
| JP7853587B2 (ja) | 作業機 | |
| WO2024204617A1 (ja) | 作業機 | |
| JP2024145234A (ja) | 作業機 | |
| JP7593479B2 (ja) | 電気機器 | |
| JP2023039805A (ja) | 電動作業機 | |
| JP2024112056A (ja) | 電動作業機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 24779311 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202480009332.8 Country of ref document: CN |
|
| ENP | Entry into the national phase |
Ref document number: 2025510213 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2025510213 Country of ref document: JP |
|
| WWP | Wipo information: published in national office |
Ref document number: 202480009332.8 Country of ref document: CN |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 24779311 Country of ref document: EP Kind code of ref document: A1 |