WO2023175928A1 - 運転支援方法及び運転支援装置 - Google Patents
運転支援方法及び運転支援装置 Download PDFInfo
- Publication number
- WO2023175928A1 WO2023175928A1 PCT/JP2022/012687 JP2022012687W WO2023175928A1 WO 2023175928 A1 WO2023175928 A1 WO 2023175928A1 JP 2022012687 W JP2022012687 W JP 2022012687W WO 2023175928 A1 WO2023175928 A1 WO 2023175928A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- lane
- vehicle
- automatic
- change
- lane change
- Prior art date
Links
Images







Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Abstract
乗員がステアリングホイールに接触していなくても同一車線内を走行するように自車両を制御する第1車線維持支援(S4、S7)と、乗員がステアリングホイールに接触していることを条件として自車両が車線変更するように自車両を制御する自動車線変更(S2)と、をコントローラが行う運転支援方法において、コントローラは、目標経路に基づいて自車両が走行すべき目標車線を選択する処理(S1)と、自車両が現在走行している車線から目標車線までの自動車線変更が、第1車線から第1車線に隣接する第2車線への第1自動車線変更と、第2車線から第2車線に隣接する第3車線への第2自動車線変更と、を含む場合、第1自動車線変更の制御の完了から第2自動車線変更の制御の開始まで、乗員がステアリングホイールに接触していることを条件として同一車線内を走行するように自車両を制御する第2車線維持支援を実行する処理(S9)とを実行する。
Description
本発明は、運転支援方法及び運転支援装置に関する。
下記特許文献1には、第1車線から第2車線への自動車線変更と第2車線から第3車線への自動車線変更とを連続して行う車両制御装置が記載されている。
乗員がステアリングホイールを把持しているハンズオン状態(乗員がステアリングホイールに接触している状態を含む)を条件として車線変更を自動的に行う自動車線変更機能が知られている。このような自動車線変更機能が搭載されている車両で、第1の自動車線変更とこれに続く第2の自動車線変更とを含む複数回の自動車線変更を連続して行う場合に、第1の自動車線変更後に一時的にハンズオフ(乗員がステアリングホイールに接触していない状態)を許可すると、乗員がステアリングホイールから手を離した直後に再度ハンズオン状態を要求されて煩わしさを感じることがある。
本発明は、ハンズオン状態を条件とする自動車線変更機能が搭載された車両で複数回の自動車線変更が連続する場合に、ステアリングホイールから手を離した直後にハンズオン状態が要求されることによる煩わしさを解消することを目的とする。
本発明は、ハンズオン状態を条件とする自動車線変更機能が搭載された車両で複数回の自動車線変更が連続する場合に、ステアリングホイールから手を離した直後にハンズオン状態が要求されることによる煩わしさを解消することを目的とする。
本発明の一態様によれば、乗員がステアリングホイールに接触していなくても自車両が同一車線内を走行するように自車両を制御する第1車線維持支援と、乗員がステアリングホイールに少なくとも接触していることを条件として自車両が車線変更するように自車両を制御する自動車線変更と、をコントローラが行う運転支援方法が提供される。コントローラは、予め設定した目標経路に基づいて前記自車両が走行すべき目標車線を選択する処理と、自車両が現在走行している車線である現在車線から目標車線までの自動車線変更が、第1車線から第1車線に隣接する第2車線への第1自動車線変更と、第2車線から第2車線に隣接する第3車線への第2自動車線変更とを含む場合、第1自動車線変更の制御の完了から第2自動車線変更の制御の開始まで、乗員がステアリングホイールに少なくとも接触していることを条件として同一車線内を走行するように自車両を制御する第2車線維持支援を実行する処理とを実行する。
本発明によれば、ハンズオン状態を条件とする自動車線変更機能が搭載された車両で複数回の自動車線変更が連続する場合に、ステアリングホイールから手を離した直後にハンズオン状態が要求されることによる煩わしさを解消できる。
本発明の目的及び利点は、特許請求の範囲に示した要素及びその組合せを用いて具現化され達成される。前述の一般的な記述及び以下の詳細な記述の両方は、単なる例示及び説明であり、特許請求の範囲のように本発明を限定するものでないと解するべきである。
本発明の目的及び利点は、特許請求の範囲に示した要素及びその組合せを用いて具現化され達成される。前述の一般的な記述及び以下の詳細な記述の両方は、単なる例示及び説明であり、特許請求の範囲のように本発明を限定するものでないと解するべきである。
(構成)
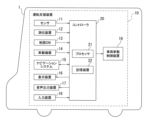
図1は、実施形態の運転支援装置を搭載する車両の概略構成の一例を示す図である。自車両1に搭載された運転支援装置10は、センサ11と、測位装置12と、地図データベース(地図DB)13と、車載機器14と、ナビゲーションシステム15と、表示装置16と、音声出力装置17と、入力装置18と、車両挙動制御装置19と、コントローラ20を備える。これらの装置は、相互に情報の送受信を行うために、たとえばCAN(Controller Area Network)その他の車載LANによって接続されている。
図1は、実施形態の運転支援装置を搭載する車両の概略構成の一例を示す図である。自車両1に搭載された運転支援装置10は、センサ11と、測位装置12と、地図データベース(地図DB)13と、車載機器14と、ナビゲーションシステム15と、表示装置16と、音声出力装置17と、入力装置18と、車両挙動制御装置19と、コントローラ20を備える。これらの装置は、相互に情報の送受信を行うために、たとえばCAN(Controller Area Network)その他の車載LANによって接続されている。
センサ11は、自車両1の走行状態を検出する。例えばセンサ11は、自車両1の前方、後方、側方をそれぞれ撮像するカメラを含む。また、センサ11は、自車両1の前方、後方、側方の障害物をそれぞれ検出するレーダを含む。センサ11は、自車両1の車速を検出する車速センサ、乗員によるステアリングホイールの保持を検出するタッチセンサおよび乗員を撮像する乗員モニターなどを含む。測位装置12は、GPSユニット、ジャイロセンサなどを備える。測位装置12は、GPSユニットにより自車両1の位置情報を周期的に取得する。また、測位装置12は、自車両1の位置情報と、ジャイロセンサから取得した角度変化情報と、車速センサから取得した車速とに基づいて、自車両1の現在位置を検出する。
地図データベース13は、各種施設や特定の地点の位置情報を含む三次元高精度地図情報を格納し、コントローラ20からアクセス可能とされたメモリである。三次元高精度地図情報は、地図情報とともに、カーブ路及びそのカーブの大きさ(たとえば曲率又は曲率半径)、道路の合流地点、分岐地点、料金所、車線数の減少位置などの詳細且つ高精度の位置情報が、三次元情報として関連付けられた地図情報である。
車載機器14は、自車両1に搭載された各種機器であり、乗員(例えば運転者)の操作により動作する。このような車載機器としては、ハンドル、アクセルペダル、ブレーキペダル、方向指示器、ワイパー、ライト、クラクション、その他の特定のスイッチなどが挙げられる。
ナビゲーションシステム15は、測位装置12から自車両1の現在の位置情報を取得し、ナビゲーション用の地図情報に自車両1の位置を重ね合わせてディスプレイなどに表示する。また、ナビゲーションシステム15は、目的地が設定された場合に、自車両1の現在位置から目的地までの経路を目標走行経路として設定し、目標走行経路を乗員に案内するナビゲーション制御を実行する。このナビゲーション制御においてナビゲーションシステム15は、ディスプレイの地図上に目標走行経路を表示し、音声等によって目標走行経路を乗員に知らせる。ナビゲーションシステム15で設定された目標走行経路は、コントローラ20によるルート走行支援制御でも利用される。ルート走行支援制御は、目標走行経路に沿って自車両1を自律走行させる制御である。
ナビゲーションシステム15は、測位装置12から自車両1の現在の位置情報を取得し、ナビゲーション用の地図情報に自車両1の位置を重ね合わせてディスプレイなどに表示する。また、ナビゲーションシステム15は、目的地が設定された場合に、自車両1の現在位置から目的地までの経路を目標走行経路として設定し、目標走行経路を乗員に案内するナビゲーション制御を実行する。このナビゲーション制御においてナビゲーションシステム15は、ディスプレイの地図上に目標走行経路を表示し、音声等によって目標走行経路を乗員に知らせる。ナビゲーションシステム15で設定された目標走行経路は、コントローラ20によるルート走行支援制御でも利用される。ルート走行支援制御は、目標走行経路に沿って自車両1を自律走行させる制御である。
表示装置16は、乗員が視認可能な位置に設けられた各種ディスプレイを含む。表示装置16は、コントローラ20の制御に従って、各種の提示情報を乗員に報知する。音声出力装置17は、ナビゲーションシステム15が備えるスピーカ、オーディオ装置のスピーカ、ブザー等の聴覚的情報を出力する装置である。音声出力装置17は、コントローラ20の制御に従って、各種の提示情報を乗員に報知する。
入力装置18は、たとえば、乗員の手動操作による入力が可能なボタンスイッチ、ディスプレイ画面上に配置されたタッチパネル、又は乗員の音声による入力が可能なマイクなどの装置である。乗員が入力装置18を操作することで、表示装置16や音声出力装置17により提示された提示情報に対する設定情報を入力することができる。
入力装置18は、たとえば、乗員の手動操作による入力が可能なボタンスイッチ、ディスプレイ画面上に配置されたタッチパネル、又は乗員の音声による入力が可能なマイクなどの装置である。乗員が入力装置18を操作することで、表示装置16や音声出力装置17により提示された提示情報に対する設定情報を入力することができる。
図2は、本実施形態の入力装置18の一部を示す図である。入力装置18は、例えばハンドルのスポーク部などに配置されたボタンスイッチ群であってよい。入力装置18は、コントローラ20による自律走行制御のオン/オフ等を設定する際に使用する。入力装置18は、メインスイッチ181と、リジューム・アクセラレートスイッチ182と、セット・コーストスイッチ183と、キャンセルスイッチ184と、車間調整スイッチ185と、車線変更支援スイッチ186とを備える。メインスイッチ181は、コントローラ20の自律走行制御をオン/オフするスイッチである。リジューム・アクセラレートスイッチ182は、自律走行制御をオフしたのちオフ前の設定速度で自律走行制御を再開することを設定したり、設定速度を上げるスイッチである。セット・コーストスイッチ183は、自律走行制御を開始するスイッチである。自律走行制御を開始するには、メインスイッチ181により自律走行制御をオンした後に、セット・コーストスイッチ183を押下する。またセット・コーストスイッチ183は、設定速度を下げるスイッチである。キャンセルスイッチ184は、自律走行制御を解除するスイッチである。車間調整スイッチ185は、先行車両との車間距離を設定するためのスイッチである。車線変更支援スイッチ186は、コントローラ20が車線変更の開始を乗員に確認した場合に車線変更の開始を指示する(承認する)ためのスイッチである。なお、図2に示すボタンスイッチ群以外にも、方向指示器の方向指示レバーやその他の車載機器14のスイッチを入力装置18として用いることができる。
車両挙動制御装置19は、自車両1の車両挙動を制御する。たとえば、車両挙動制御装置19は、自律走行制御により自車両1が設定速度で定速走行する場合には、自車両1が設定速度となるように、加減速度および走行速度を実現するための駆動機構の動作およびブレーキ動作を制御する。また、車両挙動制御装置19は、自律走行制御により自車両1が先行車両に追従走行する場合にも、同様に駆動機構及びブレーキの動作を制御する。なお、駆動機構の動作制御は、エンジン自動車にあっては内燃機関の動作、電気自動車系にあっては走行用モータの動作を含む。また、ハイブリッド自動車にあっては、内燃機関と走行用モータとのトルク配分を含む。
また車両挙動制御装置19は、自律走行制御により、後述する自律操舵制御を実行する場合に、駆動機構とブレーキの動作制御に加えて、ステアリングアクチュエータの動作を制御することで自車両1の操舵制御を実行する。
また車両挙動制御装置19は、自律走行制御により、後述する自律操舵制御を実行する場合に、駆動機構とブレーキの動作制御に加えて、ステアリングアクチュエータの動作を制御することで自車両1の操舵制御を実行する。
コントローラ20は、自車両1の走行を制御するための1つ又は複数の電子制御ユニット(ECU)であり、プロセッサ21と、記憶装置22等の周辺部品とを含む。プロセッサ21は、例えばCPUやMPUであってよい。記憶装置22は、半導体記憶装置や、磁気記憶装置、光学記憶装置等を備えてよい。記憶装置22は、レジスタ、キャッシュメモリ、主記憶装置として使用されるROM及びRAM等のメモリを含んでよい。以下に説明するコントローラ20の機能は、例えばプロセッサ21が、記憶装置22に格納されたコンピュータプログラムを実行することにより実現される。
コントローラ20は、自車両1の走行状態に関する情報を取得する走行情報取得機能を実現し、自車両1の走行速度及び/又は操舵を自律制御する自律走行制御を実行する。走行情報取得機能は、自車両1の走行状態に関する走行情報を取得する機能である。たとえばコントローラ20は、走行情報として、センサ11のカメラにより撮像された車両外部の画像情報や、レーダによる検出結果、車速センサからの車速情報も取得する。
さらに、コントローラ20は、走行情報として、自車両1の現在の位置情報を測位装置12から取得する。コントローラ20は、走行情報として、設定された目的地及び目的地までの目標走行経路をナビゲーションシステム15から取得する。コントローラ20は、走行情報として、カーブ路及びそのカーブの大きさ(たとえば曲率又は曲率半径)、合流地点、分岐地点、料金所、車線数の減少位置などの位置情報や、車線情報等の地図情報を地図データベース13から取得する。コントローラ20は、走行情報として、乗員による車載機器14の操作情報を、車載機器14から取得する。
自律走行制御においてコントローラ20は、乗員の操作に依ることなく自車両1の走行を自律制御する。自律走行制御は、自車両1の走行速度を自律制御する自律速度制御と、自車両1の操舵を自律制御する自律操舵制御とを含む。
自律速度制御においてコントローラ20は、先行車両を検出しているときは、乗員が設定した車速や制限速度を上限にして、車速に応じた車間距離を保つように車間制御を行いつつ先行車両に追従走行する。一方、先行車両を検出していない場合には、乗員が設定した車速や制限速度で定速走行を行う。前者を車間制御、後者を定速制御ともいう。
自律速度制御においてコントローラ20は、先行車両を検出しているときは、乗員が設定した車速や制限速度を上限にして、車速に応じた車間距離を保つように車間制御を行いつつ先行車両に追従走行する。一方、先行車両を検出していない場合には、乗員が設定した車速や制限速度で定速走行を行う。前者を車間制御、後者を定速制御ともいう。
定速制御は、センサ11の前方レーダ等により、自車両1が走行する車線の前方に先行車両が存在しないことが検出された場合に実行される。定速制御では、設定された走行速度を維持するように、車速センサによる車速データをフィードバックしながら、車両挙動制御装置19によりエンジンやブレーキなどの駆動機構の動作を制御する。車間制御は、センサ11の前方レーダ等により、自車両1が走行する車線の前方に先行車両が存在することが検出された場合に実行される。車間制御では、設定された走行速度を上限にして、設定された車間距離を維持するように、前方レーダにより検出した車間距離データをフィードバックしながら、車両挙動制御装置19によりエンジンやブレーキなどの駆動機構の動作を制御する。
自律操舵制御においてコントローラ20は、走行情報取得機能によって取得した走行情報に基づいてステアリングアクチュエータの動作を制御することで、自車両1の操舵制御を実行する。自律操舵制御は、レーンキープ制御、車線変更支援制御、追い越し支援制御、及びルート走行支援制御を含む。
レーンキープ制御においてコントローラ20は、例えば車線の中央付近を走行するようにステアリングアクチュエータを制御して、乗員のハンドル操作を支援する。
レーンキープ制御においてコントローラ20は、例えば車線の中央付近を走行するようにステアリングアクチュエータを制御して、乗員のハンドル操作を支援する。
車線変更支援制御においてコントローラ20は、乗員が方向指示レバーを操作すると方向指示器を点灯し、走行情報取得機能により取得した各種の走行情報に基づいて、所定の車線変更開始条件が成立する否かを判断する。車線変更開始条件を満たす場合に車線変更操作を開始する。
車線変更操作においてコントローラ20は、車線変更先の隣接車線(以下「行先車線(destination lane)」と表記することがある)へ自車両1を横方向移動させる車線変更操縦を行う。コントローラ20は、車線変更操作を実行中に、自動で車線変更を行っていることを表す情報を表示装置16により提示する。車線変更操縦が完了すると、コントローラ20は方向指示器を消灯し、車線変更後の車線でレーンキープ機能の実行を開始する。車線変更操縦は、例えば車線変更後の車線の車線中央から所定距離以内に自車両1が到達したときに完了する。
車線変更操作においてコントローラ20は、車線変更先の隣接車線(以下「行先車線(destination lane)」と表記することがある)へ自車両1を横方向移動させる車線変更操縦を行う。コントローラ20は、車線変更操作を実行中に、自動で車線変更を行っていることを表す情報を表示装置16により提示する。車線変更操縦が完了すると、コントローラ20は方向指示器を消灯し、車線変更後の車線でレーンキープ機能の実行を開始する。車線変更操縦は、例えば車線変更後の車線の車線中央から所定距離以内に自車両1が到達したときに完了する。
追い越し支援制御においてコントローラ20は、自車両1が走行する車線の前方に自車両1よりも遅い先行車両を検出し、且つ所定の追い越し提案条件を満たした場合に、自律走行制御による車線変更を実施して先行車両の追い越すことを乗員に提案する。以下、先行車両の追い越す車線変更の提案を「追い越し提案」と表記することがある。追い越し提案の提示に対して、乗員が入力装置18の車線変更支援スイッチ186を操作して承認し、且つ所定の追い越し実行条件を満たした場合に、コントローラ20は自動車線変更を実行する。自動車線変更においてコントローラ20は、自車両1が行先車線へ移動するように車線変更操作を実行する。
さらに、自車両1が先行車両の追い越した後に所定の車線復帰提案条件を満たすと、コントローラ20は、自律走行制御による車線変更を実施して追い越し前の元の車線に戻ることを表示装置16により乗員に提案する。以下、先行車両の追い越し後に元の車線に戻る車線変更の提案を「車線復帰提案」と表記することがある。車線復帰提案の提示に対して、乗員が入力装置18の車線変更支援スイッチ186を操作して承認し、且つ所定の車線復帰実行条件を満たした場合、コントローラ20は自動車線変更を実行する。自動車線変更においてコントローラ20は、自車両1が元の車線に移動するように車線変更操作を実行する。以下、追い越し支援制御を実行するコントローラ20の機能を「追い越し支援機能」と表記することがある。
ルート走行支援制御においてコントローラ20は、ナビゲーションシステム15が設定した目標走行経路上にある分岐地点や合流地点、出口や料金所等の走行方向変更地点から所定距離d0手前の地点で、所定のルート走行提案条件を満たすと、目標走行経路に沿って自車両1を走行させるための車線変更を自律走行制御で行うことを乗員に提案する。以下、目標走行経路に沿って自車両1を走行させるための車線変更の提案を「ルート走行提案」と表記することがある。ルート走行提案の提示に対して、乗員が入力装置18の車線変更支援スイッチ186を操作して承認し、且つ所定のルート走行実行条件を満たした場合に、コントローラ20は自動車線変更を実行する。自動車線変更においてコントローラ20は、自車両1が行先車線へ移動するように車線変更操作を実行する。以下、ルート走行支援制御を実行するコントローラ20の機能を「ルート走行支援機能」と表記することがある。
図3は、コントローラ20の動作モード(以下、単に「動作モード」と表記する)の状態遷移図の一例である。メインスイッチ181をオフからオンへ操作すると自律走行制御がスタンバイ状態になり、スタンバイ状態でさらにセット・コーストスイッチ183又はリジューム・アクセラレートスイッチ182をオンすることで、自律速度制御が開始する。これにより、上述の定速制御又は車間制御が開始する。
自律速度制御を実行中に条件(1)が成立すると、動作モードはハンズオンモードの車線維持モードに遷移する。ハンズオンモードとは、乗員がステアリングホイールに少なくとも接触していることを条件としてコントローラ20が自律操舵制御を実行する動作モードである。ハンズオンモードでは、乗員がステアリングホイールに少なくとも接触していなければ自律操舵制御が作動しない。または、自律操舵制御の作動中の場合にステアリングホイールの接触を検知できなくなった場合は、自律操舵制御を中止又は中断される。乗員がステアリングホイールに接触しているか否かは、例えばステアリングホイールに設けたセンサ11のタッチセンサの一部又は複数個所で接触を場合としてもよい。または、乗員がステアリングホイールを把持していることを条件としてもよい。把持しているか否かは、ステアリングホイールに設けた圧力センサで所定値以上の値を検出した場合としてもよい。また、車線維持モードとは、コントローラ20がレーンキープ制御を実行する動作モードである。ハンズオンモードの車線維持モードにおいて実行されるレーンキープ制御は、特許請求の範囲に記載の「第2車線維持支援」の一例である。
例えば条件(1)は次に例示する条件が全て成立することであってよい。
・自車両1の両側のレーンマーカを検出している。
・乗員がステアリングホイールを持っている。
・車線の中央付近を走行している。
・方向指示器が作動していない。
自律速度制御を実行中に条件(1)が成立すると、動作モードはハンズオンモードの車線維持モードに遷移する。ハンズオンモードとは、乗員がステアリングホイールに少なくとも接触していることを条件としてコントローラ20が自律操舵制御を実行する動作モードである。ハンズオンモードでは、乗員がステアリングホイールに少なくとも接触していなければ自律操舵制御が作動しない。または、自律操舵制御の作動中の場合にステアリングホイールの接触を検知できなくなった場合は、自律操舵制御を中止又は中断される。乗員がステアリングホイールに接触しているか否かは、例えばステアリングホイールに設けたセンサ11のタッチセンサの一部又は複数個所で接触を場合としてもよい。または、乗員がステアリングホイールを把持していることを条件としてもよい。把持しているか否かは、ステアリングホイールに設けた圧力センサで所定値以上の値を検出した場合としてもよい。また、車線維持モードとは、コントローラ20がレーンキープ制御を実行する動作モードである。ハンズオンモードの車線維持モードにおいて実行されるレーンキープ制御は、特許請求の範囲に記載の「第2車線維持支援」の一例である。
例えば条件(1)は次に例示する条件が全て成立することであってよい。
・自車両1の両側のレーンマーカを検出している。
・乗員がステアリングホイールを持っている。
・車線の中央付近を走行している。
・方向指示器が作動していない。
ハンズオンモードの車線維持モードにおいて条件(2)が成立すると、動作モードはハンズオフモードに遷移する。ハンズオフモードとは、乗員がステアリングホイールから手を離しても(すなわち乗員がステアリングホイールに接触していなくても)コントローラ20がレーンキープ制御を実行する動作モードである。ハンズオフモードにおいて実行されるレーンキープ制御は、特許請求の範囲に記載の「第1車線維持支援」の一例である。
例えば条件(2)は次に例示する条件が全て成立することであってよい。
・自車両1が自動車専用道を走行している。
・高精度地図が利用可能である。
・GPS信号が有効である。
・乗員がステアリングホイールを持っている。
ハンズオフモードにおいて条件(3)が成立すると、動作モードはハンズオンモードの車線維持モードに遷移する。
例えば条件(3)は次に例示する条件のいずれかが成立することであってよい。
・自車両1が自動車専用道以外の道路を走行している。
・高精度地図が利用できない。
・GPS信号が受信できない。
例えば条件(2)は次に例示する条件が全て成立することであってよい。
・自車両1が自動車専用道を走行している。
・高精度地図が利用可能である。
・GPS信号が有効である。
・乗員がステアリングホイールを持っている。
ハンズオフモードにおいて条件(3)が成立すると、動作モードはハンズオンモードの車線維持モードに遷移する。
例えば条件(3)は次に例示する条件のいずれかが成立することであってよい。
・自車両1が自動車専用道以外の道路を走行している。
・高精度地図が利用できない。
・GPS信号が受信できない。
ハンズオフモードにおいて条件(4)が成立すると、動作モードはハンズオンモードの車線変更モードに遷移する。車線変更モードとは、コントローラ20が車線変更支援制御、追い越し支援制御、及びルート走行支援制御を実行する動作モードである。すなわち、コントローラ20は、乗員がステアリングホイールに少なくとも接触していることを条件として自動車線変更を実行する。この車線変更モードにおけるハンズオンモードは、車線維持モードにおけるハンズオンモードに比べ、ステアリングホイールに接触しているか否かの判断閾値を下げてもよい。
例えば条件(4)は次に例示する条件のいずれかが成立することであってよい。
・コントローラ20が追い越し提案、車線復帰提案又はルート走行提案を提示し、乗員が車線変更支援スイッチ186を操作した。
・乗員が方向指示レバーを操作した。
ハンズオンモードの車線変更モードにおいて条件(5)が成立すると、動作モードはハンズオンモードの車線維持モードに遷移する。
例えば条件(5)は次に例示する条件のいずれかが成立することであってよい。
・追い越し提案又は車線復帰提案に対して乗員が車線変更支援スイッチ186を操作してから所定時間以内に車線変更操作を開始できなかった。
・ルート走行提案に対して乗員が車線変更支援スイッチ186を操作してから車線変更操作を開始できずに分岐地点に接近しすぎた。
・車線変更操作が完了した。
例えば条件(4)は次に例示する条件のいずれかが成立することであってよい。
・コントローラ20が追い越し提案、車線復帰提案又はルート走行提案を提示し、乗員が車線変更支援スイッチ186を操作した。
・乗員が方向指示レバーを操作した。
ハンズオンモードの車線変更モードにおいて条件(5)が成立すると、動作モードはハンズオンモードの車線維持モードに遷移する。
例えば条件(5)は次に例示する条件のいずれかが成立することであってよい。
・追い越し提案又は車線復帰提案に対して乗員が車線変更支援スイッチ186を操作してから所定時間以内に車線変更操作を開始できなかった。
・ルート走行提案に対して乗員が車線変更支援スイッチ186を操作してから車線変更操作を開始できずに分岐地点に接近しすぎた。
・車線変更操作が完了した。
このため、自動車線変更において車線変更操作が完了すると、動作モードはハンズオンモードの車線維持モードに遷移する。ハンズオンモードの車線維持モードにおいて条件(2)が成立するとハンズオフモードに遷移する。この結果、乗員はステアリングホイールから手を離してもコントローラ20による車線維持支援を利用できる。
なお、図3に示す他の条件(6)~(9)については後述する。
ルート走行支援制御による自動車線変更では、ナビゲーションシステム15が設定した目標走行経路に沿って走行するために自車両1が現在走行すべき車線(以下「目標車線(target lane)」と表記することがある)を設定した場合に、自車両1が現在走行している車線(以下「現在車線(current lane)」)と目標車線との間に1車線以上の他の車線が介在し、現在車線から目標車線まで複数車線分の自動車線変更を連続して実行する場合がある。以下の説明において複数車線分の自動車線変更を「複数回の自動車線変更」と表記することがある。
なお、図3に示す他の条件(6)~(9)については後述する。
ルート走行支援制御による自動車線変更では、ナビゲーションシステム15が設定した目標走行経路に沿って走行するために自車両1が現在走行すべき車線(以下「目標車線(target lane)」と表記することがある)を設定した場合に、自車両1が現在走行している車線(以下「現在車線(current lane)」)と目標車線との間に1車線以上の他の車線が介在し、現在車線から目標車線まで複数車線分の自動車線変更を連続して実行する場合がある。以下の説明において複数車線分の自動車線変更を「複数回の自動車線変更」と表記することがある。
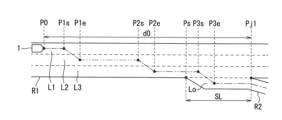
図4を参照して、現在車線から目標車線まで複数回の自動車線変更を連続して実行する状況を例示する。自車両1が現在走行する第1道路R1には車線L1、L2及びL3が設けられている。車線L1は、自車両1が現在走行している現在車線である。例えば第1道路R1は本線道路であってよい。第2道路R2は、分岐地点Pj1において第1道路R1から分岐しており、第2道路R2へ進出する出口車線Loは、第1道路R1上の車線L3から分岐している。例えば第2道路R2は分岐道路であってよい。
車線変更区間SLは、車線L3と出口車線Loとの間の車線変更が可能な区間である。車線変更区間SLは、出口車線Loが発生する開始地点Psで始まり、第1道路R1と第2道路R2とが物理的に分離する、又は第1道路R1と第2道路R2との間の構造物(壁や中央分離帯)により車線L3と出口車線Loとの間の車線変更ができなくなる分岐地点Pj1で終了する。
車線変更区間SLは、車線L3と出口車線Loとの間の車線変更が可能な区間である。車線変更区間SLは、出口車線Loが発生する開始地点Psで始まり、第1道路R1と第2道路R2とが物理的に分離する、又は第1道路R1と第2道路R2との間の構造物(壁や中央分離帯)により車線L3と出口車線Loとの間の車線変更ができなくなる分岐地点Pj1で終了する。
例えば、ナビゲーションシステム15が、第1道路R1から第2道路R2へ進出する目標走行経路を設定した場合を想定する。ルート走行支援制御では、出口車線Loが目標車線に設定される。走行方向変更地点である分岐地点Pj1から所定距離d0手前の地点P0に自車両1が到達すると、コントローラ20はルート走行提案を乗員に提示する。乗員がルート走行提案を承認すると、現在車線L1から車線L2への1回目の自動車線変更と、車線L2から車線L3への2回目の自動車線変更と、車線L3から目標車線Loへの3回目の自動車線変更が連続して実行される。
この場合、例えば、1回目の自動車線変更の後にハンズオフモードが開始してステアリングホイールから手を離した直後に、2回目の自動車線変更のためにハンズオン状態を要求されると、乗員は煩わしさを感じることがある。2回目の自動車線変更以降の場合も同様である。
この場合、例えば、1回目の自動車線変更の後にハンズオフモードが開始してステアリングホイールから手を離した直後に、2回目の自動車線変更のためにハンズオン状態を要求されると、乗員は煩わしさを感じることがある。2回目の自動車線変更以降の場合も同様である。
そこでコントローラ20は、現在車線L1から目標車線Loまでの自動車線変更が、第1車線から第1車線に隣接する第2車線への第1自動車線変更と、第2車線から第2車線に隣接する第3車線への第2自動車線変更とを要する場合、第1自動車線変更の制御の完了から第2自動車線変更の制御の開始まで、ハンズオンモードの車線維持モードで動作する。これにより乗員は、第1自動車線変更と第2自動車線変更との間でステアリングホイールから手を離すことがなくなるので、ステアリングホイールから手を話した直後に第2自動車線変更のためにハンズオン状態を要求されることによる煩わしさを解消できる。
図4において、一点鎖線及び二点鎖線は、現在車線L1から目標車線Loまでの自動車線変更を実行した場合の自車両1の走行軌道を模式的に示している。
地点P1s、P2s及びP3sは、それぞれ1~3回目の自動車線変更の制御の開始地点を示す。各々の自動車線変更の制御は、例えば所定のルート走行実行条件を満たしたときに開始してよい。地点P1e、P2e及びP3eは、それぞれ1~3回目の自動車線変更の制御のそれぞれ完了地点を示す。各々の自動車線変更の制御が完了するのは、例えば車線変更後の走行車線の車線中央と自車両1との間の距離が所定距離以下になったときであってよい。各々の自動車線変更の制御が完了すると次回の自動車線変更の制御が開始するまでの間(図4の例では完了地点P1eから開始地点P2sの間と完了地点P2eから開始地点P3sの間)、レーンキープ制御が実行される。
地点P1s、P2s及びP3sは、それぞれ1~3回目の自動車線変更の制御の開始地点を示す。各々の自動車線変更の制御は、例えば所定のルート走行実行条件を満たしたときに開始してよい。地点P1e、P2e及びP3eは、それぞれ1~3回目の自動車線変更の制御のそれぞれ完了地点を示す。各々の自動車線変更の制御が完了するのは、例えば車線変更後の走行車線の車線中央と自車両1との間の距離が所定距離以下になったときであってよい。各々の自動車線変更の制御が完了すると次回の自動車線変更の制御が開始するまでの間(図4の例では完了地点P1eから開始地点P2sの間と完了地点P2eから開始地点P3sの間)、レーンキープ制御が実行される。
一点鎖線はコントローラ20がハンズオフモードで動作している期間の走行軌道を模式的に示し、二点鎖線はコントローラ20がハンズオンモードで動作している期間の走行軌道を模式的に示している。コントローラ20は、1回目の自動車線変更の制御の開始地点P1sから3回目の自動車線変更の制御の完了地点P3eまでハンズオンモードを維持する。したがって、1回目の自動車線変更の制御の完了地点P1eから2回目の自動車線変更の制御の開始地点P2sの間、2回目の自動車線変更の制御の完了地点P2eから3回目の自動車線変更の制御の開始地点P3sの間、コントローラ20はハンズオンモードの車線維持モードで動作する。自車両1が目標車線Loに到達し、完了地点P3eで3回目の自動車線変更の制御が完了すると、コントローラ20はハンズオフモードを開始する。
図5を参照する。ルート走行支援制御においてルート走行提案が承認された場合、コントローラ20は、出口車線Loへ分岐する第1道路R1上の車線L3までの自動車線変更を可及的速やかに完了してもよい。より確実に目標走行経路に沿って走行するためである。このため車線L2から車線L3への2回目の自動車線変更が完了してから、車線L3から出口車線Loへの3回目の自動車線変更を開始するまでの走行距離が長くなることがある。この場合には、コントローラ20をハンズオフモードで作動させ、乗員の負担を軽減することが好ましい。
このためコントローラ20は、車線L3から出口車線Loが分岐する開始地点Psから所定距離d1より手前の地点で車線L2から車線L3への自動車線変更の制御が完了した場合に、車線L2から車線L3への自動車線変更の制御の完了後に、ハンズオフモードでレーンキープ制御を実行してよい。この場合にコントローラ20は、開始地点Psから所定距離d2手前の地点で、ハンズオンモードの車線変更モードに遷移した後に、車線L3から出口車線Loへの自動車線変更を実行してよい。
このためコントローラ20は、車線L3から出口車線Loが分岐する開始地点Psから所定距離d1より手前の地点で車線L2から車線L3への自動車線変更の制御が完了した場合に、車線L2から車線L3への自動車線変更の制御の完了後に、ハンズオフモードでレーンキープ制御を実行してよい。この場合にコントローラ20は、開始地点Psから所定距離d2手前の地点で、ハンズオンモードの車線変更モードに遷移した後に、車線L3から出口車線Loへの自動車線変更を実行してよい。
図6を参照する。分岐地点Pj1から所定距離d0手前の地点に自車両1が到達する前に、分岐地点Pj2において現在車線L1が本線道路から分岐することがある。この場合にルート走行支援制御は、分岐地点Pj2の手前の所定距離d0手前の地点Pxでルート走行提案を提示する。この結果、現在車線L1から車線L2への1回目の自動車線変更の制御の完了地点P1eと分岐地点Pj1との間の距離が、所定距離d0よりも長くなる場合がある。この場合には車線L2への1回目の自動車線変更が完了してから、車線L2から車線L3への2回目の自動車線変更を開始するまでの走行距離が長くなることがある。この場合には、コントローラ20をハンズオフモードで作動させ、乗員の負担を軽減することが好ましい。
このためコントローラ20は、現在車線L1から車線L2への1回目の自動車線変更の制御の完了地点P1eと分岐地点Pj1との間の距離が、所定距離d0よりも長い場合、現在車線L1から車線L2への自動車線変更の制御の完了後に、ハンズオフモードでレーンキープ制御を実行してよい。この場合にコントローラ20は、分岐地点Pj1から所定距離d0手前の地点P0で、車線L2から車線L3への自動車線変更の制御を開始してよい。
このためコントローラ20は、現在車線L1から車線L2への1回目の自動車線変更の制御の完了地点P1eと分岐地点Pj1との間の距離が、所定距離d0よりも長い場合、現在車線L1から車線L2への自動車線変更の制御の完了後に、ハンズオフモードでレーンキープ制御を実行してよい。この場合にコントローラ20は、分岐地点Pj1から所定距離d0手前の地点P0で、車線L2から車線L3への自動車線変更の制御を開始してよい。
図7を参照する。第1道路R1上の車線L3が第1道路R1から分離して第2道路の出口車線Loとなることがある。この場合には、車線L2から車線L3への2回目の自動車線変更が完了すると目標車線Loへ到達し、現在車線L1から目標車線Loまでの複数回の自動車線変更が完了する。このため、2回目の自動車線変更が完了するとコントローラ20はハンズオフモードに遷移する。
図8は、コントローラ20においてルート走行支援制御を行う機能構成の一例のブロック図である。コントローラ20は、地図情報取得部31と、ナビゲーション情報取得部32と、自己位置情報取得部33と、周辺状況認識部34と、車線変更提案判断部35と、車線変更可否判断部36と、車線変更状態管理部37と、車線維持制御部38を備える。
地図情報取得部31は、地図データベース13又は図示しない通信装置により地図情報を取得する。ナビゲーション情報取得部32は、ナビゲーションシステム15から目的地までの目標走行経路に関するルート情報を取得する。自己位置情報取得部33は、測位装置12から自車両1の現在位置に関する現在位置情報を取得する。周辺状況認識部34は、走行情報に基づいて自車両1の周囲の状況(例えば他車両や、白線)を認識する。特に周辺状況認識部34は、行先車線上の他車両と自車両1との間の車線延伸方向における間隔dを認識する。例えば間隔dは、車線延伸方向における他車両と自車両1と間の車間距離であってもよく車間時間であってもよい。
地図情報取得部31は、地図データベース13又は図示しない通信装置により地図情報を取得する。ナビゲーション情報取得部32は、ナビゲーションシステム15から目的地までの目標走行経路に関するルート情報を取得する。自己位置情報取得部33は、測位装置12から自車両1の現在位置に関する現在位置情報を取得する。周辺状況認識部34は、走行情報に基づいて自車両1の周囲の状況(例えば他車両や、白線)を認識する。特に周辺状況認識部34は、行先車線上の他車両と自車両1との間の車線延伸方向における間隔dを認識する。例えば間隔dは、車線延伸方向における他車両と自車両1と間の車間距離であってもよく車間時間であってもよい。
車線変更提案判断部35は、目標走行経路に沿って走行するための走行方向変更地点から所定距離d0手前の地点P0に自車両1が到達すると、目標車線を選択する。車線変更提案判断部35は、ルート走行提案条件を満たすか否かを判定する。例えばルート走行提案条件は以下の条件を含んでいてよい。
・ルート走行支援機能が有効である。
・自車両1が現在走行している車線と目標車線とが異なっている。
・目標車線側への車線変更が可能である(例えば、車線区分線が車線変更を禁止していない、道路の曲率半径が閾値以上である等)。
ルート走行提案条件を満たすと、車線変更提案判断部35は、ルート走行提案を提示する地点である提案地点を設定する。自車両1が提案地点に到達すると、車線変更提案判断部35は、ルート走行提案要求を車線変更状態管理部37に出力する。
・ルート走行支援機能が有効である。
・自車両1が現在走行している車線と目標車線とが異なっている。
・目標車線側への車線変更が可能である(例えば、車線区分線が車線変更を禁止していない、道路の曲率半径が閾値以上である等)。
ルート走行提案条件を満たすと、車線変更提案判断部35は、ルート走行提案を提示する地点である提案地点を設定する。自車両1が提案地点に到達すると、車線変更提案判断部35は、ルート走行提案要求を車線変更状態管理部37に出力する。
車線変更提案判断部35がルート走行提案要求を出力すると、車線変更状態管理部37は、ルート走行提案を乗員に提示するためのルート走行情報を表示装置16や音声出力装置17により出力する。
ルート走行提案を提示すると、車線変更可否判断部36は所定のルート走行実行条件が成立するか否かを判定する。例えばルート走行実行条件は以下の条件を含んでいてよい。
・ルート走行支援機能が有効である。
・自車両1が現在走行している車線と目標車線とが異なっている。
・行先車線上の他車両と自車両1との間の車線延伸方向における間隔dが間隔閾値Dp以上である。
・目標車線側への車線変更が可能である。
ルート走行実行条件を満足する場合に、車線変更状態管理部37は、方向指示器を点灯して車線変更操作を実行する。また車線変更状態管理部37は、ルート走行実行条件を満たすことを条件に、自車両1が行先車線に移動するように車線変更操作を開始する。
ルート走行提案を提示すると、車線変更可否判断部36は所定のルート走行実行条件が成立するか否かを判定する。例えばルート走行実行条件は以下の条件を含んでいてよい。
・ルート走行支援機能が有効である。
・自車両1が現在走行している車線と目標車線とが異なっている。
・行先車線上の他車両と自車両1との間の車線延伸方向における間隔dが間隔閾値Dp以上である。
・目標車線側への車線変更が可能である。
ルート走行実行条件を満足する場合に、車線変更状態管理部37は、方向指示器を点灯して車線変更操作を実行する。また車線変更状態管理部37は、ルート走行実行条件を満たすことを条件に、自車両1が行先車線に移動するように車線変更操作を開始する。
車線維持制御部38は、レーンキープ制御を実行し、自車両1が同一車線内を走行するように自車両1を制御する。例えば車線の中央付近を走行するようにステアリングアクチュエータを制御してもよく、左車輪と右車輪の間に駆動力差や制動力差を付与してもよい。
車線維持制御部38は、ルート走行支援制御において連続して実行される第1車線から第1車線に隣接する第2車線への第1自動車線変更と、第2車線から第2車線に隣接する第3車線への第2自動車線変更のうち、第1自動車線変更の制御が完了すると(すなわち車線変更操作が完了すると)、条件(6)が成立するか否かを判定する。例えば条件(6)は次に例示する条件が全て成立することであってよい。
・第1自動車線変更の制御の完了地点と分岐地点Pj1との間の距離が所定距離d0以下である。
・第1自動車線変更後の走行車線が目標車線の隣接車線でないか、又は第1自動車線変更の制御の完了地点から車線変更区間SLの開始地点Psまでの距離がd1以下である。
条件(6)が全て成立する場合、車線維持制御部38はハンズオンモードの車線維持モードを維持する。
第1自動車線変更の制御の完了後にハンズオンモードの車線維持モードが維持されている状態で、条件(7)が成立すると車線変更状態管理部37は、方向指示器を点灯して第2自動車線変更の制御を開始する(すなわち車線変更操作を開始する)。条件(7)はルート走行実行条件であってよい。
車線維持制御部38は、ルート走行支援制御において連続して実行される第1車線から第1車線に隣接する第2車線への第1自動車線変更と、第2車線から第2車線に隣接する第3車線への第2自動車線変更のうち、第1自動車線変更の制御が完了すると(すなわち車線変更操作が完了すると)、条件(6)が成立するか否かを判定する。例えば条件(6)は次に例示する条件が全て成立することであってよい。
・第1自動車線変更の制御の完了地点と分岐地点Pj1との間の距離が所定距離d0以下である。
・第1自動車線変更後の走行車線が目標車線の隣接車線でないか、又は第1自動車線変更の制御の完了地点から車線変更区間SLの開始地点Psまでの距離がd1以下である。
条件(6)が全て成立する場合、車線維持制御部38はハンズオンモードの車線維持モードを維持する。
第1自動車線変更の制御の完了後にハンズオンモードの車線維持モードが維持されている状態で、条件(7)が成立すると車線変更状態管理部37は、方向指示器を点灯して第2自動車線変更の制御を開始する(すなわち車線変更操作を開始する)。条件(7)はルート走行実行条件であってよい。
また車線維持制御部38は、第1自動車線変更の制御が完了すると条件(8)が成立するか否かを判定する。例えば条件(8)は次に例示する条件のいずれかが成立することであってよい。
・第1自動車線変更の制御の完了地点と分岐地点Pj1との間の距離が所定距離d0以下でない。
・第1自動車線変更後の走行車線が目標車線の隣接車線であり、且つ第1自動車線変更の制御の完了地点から車線変更区間SLの開始地点Psまでの距離がd1より長い。
条件(8)が全て成立する場合、車線維持制御部38は動作モードをハンズオフモードに遷移する。
第1自動車線変更後の走行車線が目標車線の隣接車線であり、コントローラ20がハンズオフモードで動作している場合、車線維持制御部38は、第1自動車線変更の制御が完了すると条件(9)が成立するか否かを判定する。例えば条件(9)は次に例示する条件であってよい。
・自車両1から車線変更区間SLの開始地点Psよりも所定距離d2手前の地点に到達した。
条件(9)が成立する場合、車線維持制御部38は動作モードをハンズオンモードの車線維持モードに遷移する。
・第1自動車線変更の制御の完了地点と分岐地点Pj1との間の距離が所定距離d0以下でない。
・第1自動車線変更後の走行車線が目標車線の隣接車線であり、且つ第1自動車線変更の制御の完了地点から車線変更区間SLの開始地点Psまでの距離がd1より長い。
条件(8)が全て成立する場合、車線維持制御部38は動作モードをハンズオフモードに遷移する。
第1自動車線変更後の走行車線が目標車線の隣接車線であり、コントローラ20がハンズオフモードで動作している場合、車線維持制御部38は、第1自動車線変更の制御が完了すると条件(9)が成立するか否かを判定する。例えば条件(9)は次に例示する条件であってよい。
・自車両1から車線変更区間SLの開始地点Psよりも所定距離d2手前の地点に到達した。
条件(9)が成立する場合、車線維持制御部38は動作モードをハンズオンモードの車線維持モードに遷移する。
現在車線L1から目標車線Loまでの複数回の自動車線変更の制御が全て完了すると、車線維持制御部38は、動作モードをハンズオンモードの車線維持モードに遷移させる。そして条件(2)が成立するとハンズオフモードに遷移させる。
車両挙動制御装置19は、車線変更状態管理部37及び車線維持制御部38からの指令に基づいて、ステアリングアクチュエータの動作を制御することで、自車両1の操舵制御を実行する。
車両挙動制御装置19は、車線変更状態管理部37及び車線維持制御部38からの指令に基づいて、ステアリングアクチュエータの動作を制御することで、自車両1の操舵制御を実行する。
図9は、実施形態の運転支援方法の一例のフローチャートである。ステップS1において車線変更提案判断部35は、目標走行経路に沿って走行するために現在走行すべき目標車線を選択する。
ステップS2において車線変更状態管理部37は、1車線分の自動車先行を実行する。
ステップS3において車線変更提案判断部35は、ルート走行支援機能が有効であるか否かを判定する。ルート走行支援機能が有効である場合(ステップS3:Y)に処理はステップS5へ進む。ルート走行支援機能が有効でない場合(ステップS3:N)に処理はステップS4へ進む。
ステップS4において車線維持制御部38は動作モードをハンズオフモードに遷移する。その後に処理は終了する。
ステップS5において車線変更提案判断部35は、自車両1が目標車線に到達したか否かを判定する。自車両1が目標車線に到達していない(すなわち自車両1が現在走行している走行車線が目標車線でない)場合(ステップS5:Y)に処理はステップS6へ進む。自車両1が目標車線に到達した場合(ステップS5:N)に処理はステップS4へ進む。
ステップS2において車線変更状態管理部37は、1車線分の自動車先行を実行する。
ステップS3において車線変更提案判断部35は、ルート走行支援機能が有効であるか否かを判定する。ルート走行支援機能が有効である場合(ステップS3:Y)に処理はステップS5へ進む。ルート走行支援機能が有効でない場合(ステップS3:N)に処理はステップS4へ進む。
ステップS4において車線維持制御部38は動作モードをハンズオフモードに遷移する。その後に処理は終了する。
ステップS5において車線変更提案判断部35は、自車両1が目標車線に到達したか否かを判定する。自車両1が目標車線に到達していない(すなわち自車両1が現在走行している走行車線が目標車線でない)場合(ステップS5:Y)に処理はステップS6へ進む。自車両1が目標車線に到達した場合(ステップS5:N)に処理はステップS4へ進む。
ステップS6において車線維持制御部38は、ステップS2の自動車線変更の制御の完了地点と分岐地点Pj1との間の距離が所定距離d0以下であるか否かを判定する。完了地点と分岐地点Pj1との間の距離が所定距離d0以下である場合(ステップS6:Y)に処理はステップS8へ進む。完了地点と分岐地点Pj1との間の距離が所定距離d0以下でない場合(ステップS6:N)に処理はステップS7へ進む。
ステップS7において車線維持制御部38は、動作モードをハンズオフモードに遷移する。その後に処理はステップS2に戻る。
ステップS8において車線維持制御部38は、自車両1が現在走行している走行車線が目標車線の隣接車線であるか否かを判定する。走行車線が目標車線の隣接車線である場合(ステップS8:Y)に処理はステップS10へ進む。走行車線が目標車線の隣接車線でない場合(ステップS8:N)に処理はステップS9へ進む。
ステップS9において車線維持制御部38は、動作モードをハンズオンモードの車線維持モードに維持する。その後に処理はステップS2に戻る。
ステップS10において車線維持制御部38は、ステップS2の自動車線変更の制御の完了地点から車線変更区間SLの開始地点Psまでの距離がd1以下であるか否かを判定する。完了地点から開始地点Psまでの距離がd1以下である場合(ステップS10:Y)に処理はステップS9へ進む。完了地点から開始地点Psまでの距離がd1以下でない場合(ステップS10:N)に処理はステップS7へ進む。
ステップS7において車線維持制御部38は、動作モードをハンズオフモードに遷移する。その後に処理はステップS2に戻る。
ステップS8において車線維持制御部38は、自車両1が現在走行している走行車線が目標車線の隣接車線であるか否かを判定する。走行車線が目標車線の隣接車線である場合(ステップS8:Y)に処理はステップS10へ進む。走行車線が目標車線の隣接車線でない場合(ステップS8:N)に処理はステップS9へ進む。
ステップS9において車線維持制御部38は、動作モードをハンズオンモードの車線維持モードに維持する。その後に処理はステップS2に戻る。
ステップS10において車線維持制御部38は、ステップS2の自動車線変更の制御の完了地点から車線変更区間SLの開始地点Psまでの距離がd1以下であるか否かを判定する。完了地点から開始地点Psまでの距離がd1以下である場合(ステップS10:Y)に処理はステップS9へ進む。完了地点から開始地点Psまでの距離がd1以下でない場合(ステップS10:N)に処理はステップS7へ進む。
(実施形態の効果)
(1)コントローラ20は、乗員がステアリングホイールに接触していなくても自車両1が同一車線内を走行するように自車両1を制御する第1車線維持支援と、乗員がステアリングホイールに少なくとも接触していることを条件として自車両1が車線変更するように自車両1を制御する自動車線変更と、を行う。コントローラ20は、予め設定した目標経路に基づいて自車両1が走行すべき目標車線を選択する処理と、自車両1が現在走行している車線である現在車線から目標車線までの自動車線変更が、第1車線から第1車線に隣接する第2車線への第1自動車線変更と、第2車線から第2車線に隣接する第3車線への第2自動車線変更とを含む場合、第1自動車線変更の制御の完了から第2自動車線変更の制御の開始まで、乗員がステアリングホイールに少なくとも接触していることを条件として同一車線内を走行するように自車両1を制御する第2車線維持支援を実行する処理と、を実行する。
これにより乗員は、第1自動車線変更と第2自動車線変更との間でステアリングホイールから手を離すことがなくなるので、ステアリングホイールから手を話した直後に第2自動車線変更のためにハンズオン状態を要求されることによる煩わしさを解消できる。
(1)コントローラ20は、乗員がステアリングホイールに接触していなくても自車両1が同一車線内を走行するように自車両1を制御する第1車線維持支援と、乗員がステアリングホイールに少なくとも接触していることを条件として自車両1が車線変更するように自車両1を制御する自動車線変更と、を行う。コントローラ20は、予め設定した目標経路に基づいて自車両1が走行すべき目標車線を選択する処理と、自車両1が現在走行している車線である現在車線から目標車線までの自動車線変更が、第1車線から第1車線に隣接する第2車線への第1自動車線変更と、第2車線から第2車線に隣接する第3車線への第2自動車線変更とを含む場合、第1自動車線変更の制御の完了から第2自動車線変更の制御の開始まで、乗員がステアリングホイールに少なくとも接触していることを条件として同一車線内を走行するように自車両1を制御する第2車線維持支援を実行する処理と、を実行する。
これにより乗員は、第1自動車線変更と第2自動車線変更との間でステアリングホイールから手を離すことがなくなるので、ステアリングホイールから手を話した直後に第2自動車線変更のためにハンズオン状態を要求されることによる煩わしさを解消できる。
(2)目標車線が、自車両1が現在走行する第1道路から分岐する第2道路に進出する出口車線であり、且つ、第2自動車線変更が、出口車線へ分岐する第1道路上の車線である第2車線から出口車線である第3車線への自動車線変更であり、且つ、第2車線から出口車線が分岐する分岐点から所定距離以上手前の地点で第1自動車線変更の制御が完了した場合に、コントローラ20は、第1自動車線変更の制御の完了後に第1車線維持支援を実行してもよい。
これにより、第1自動車線変更の制御が完了してから、第2自動車線変更の制御を開始するまでの走行距離が長くなった場合に、ステアリングホイールから手を離しても第1車線維持支援が実行されるので、乗員の負担を軽減できる。
これにより、第1自動車線変更の制御が完了してから、第2自動車線変更の制御を開始するまでの走行距離が長くなった場合に、ステアリングホイールから手を離しても第1車線維持支援が実行されるので、乗員の負担を軽減できる。
ここに記載されている全ての例及び条件的な用語は、読者が、本発明と技術の進展のために発明者により与えられる概念とを理解する際の助けとなるように、教育的な目的を意図したものであり、具体的に記載されている上記の例及び条件、並びに本発明の優位性及び劣等性を示すことに関する本明細書における例の構成に限定されることなく解釈されるべきものである。本発明の実施例は詳細に説明されているが、本発明の精神及び範囲から外れることなく、様々な変更、置換及び修正をこれに加えることが可能であると解すべきである。
1…自車両、10…運転支援装置、11…センサ、12…測位装置、13…地図DB、14…車載機器、15…ナビゲーションシステム、16…表示装置、17…音声出力装置、18…入力装置、19…車両挙動制御装置、20…コントローラ
Claims (3)
- 乗員がステアリングホイールに接触していなくても自車両が同一車線内を走行するように前記自車両を制御する第1車線維持支援と、前記乗員が前記ステアリングホイールに少なくとも接触していることを条件として前記自車両が車線変更するように前記自車両を制御する自動車線変更と、をコントローラが行う運転支援方法であって、
予め設定した目標経路に基づいて前記自車両が走行すべき目標車線を選択する処理と、
前記自車両が現在走行している車線である現在車線から前記目標車線までの自動車線変更が、第1車線から前記第1車線に隣接する第2車線への第1自動車線変更と、前記第2車線から前記第2車線に隣接する第3車線への第2自動車線変更とを含む場合、前記第1自動車線変更の制御の完了から前記第2自動車線変更の制御の開始まで、前記乗員が前記ステアリングホイールに少なくとも接触していることを条件として同一車線内を走行するように前記自車両を制御する第2車線維持支援を実行する処理と、
を前記コントローラに実行させることを特徴とする運転支援方法。 - 前記目標車線が、前記自車両が現在走行する第1道路から分岐する第2道路に進出する出口車線であり、且つ、前記第2自動車線変更が、前記出口車線へ分岐する前記第1道路上の車線である前記第2車線から前記出口車線である前記第3車線への自動車線変更であり、且つ、前記第2車線から前記出口車線が分岐する分岐点から所定距離以上手前の地点で前記第1自動車線変更の制御が完了した場合に、前記コントローラは、前記第1自動車線変更の制御の完了後に前記第1車線維持支援を実行することを特徴とする請求項1に記載の運転支援方法。
- 乗員がステアリングホイールに接触していなくても自車両が同一車線内を走行するように前記自車両を制御する第1車線維持支援と、前記乗員が前記ステアリングホイールに少なくとも接触していることを条件として前記自車両が車線変更するように前記自車両を制御する自動車線変更と、を行うコントローラを備える運転支援装置であって、
前記コントローラは、
予め設定した目標経路に基づいて前記自車両が走行すべき目標車線を選択する処理と、
前記自車両が現在走行している車線である現在車線から前記目標車線までの自動車線変更が、第1車線から前記第1車線に隣接する第2車線への第1自動車線変更と、前記第2車線から前記第2車線に隣接する第3車線への第2自動車線変更とを含む場合、前記第1自動車線変更の制御の完了から前記第2自動車線変更の制御の開始まで、前記乗員が前記ステアリングホイールに少なくとも接触していることを条件として同一車線内を走行するように前記自車両を制御する第2車線維持支援を実行する処理と、
を実行することを特徴とする運転支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/012687 WO2023175928A1 (ja) | 2022-03-18 | 2022-03-18 | 運転支援方法及び運転支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2022/012687 WO2023175928A1 (ja) | 2022-03-18 | 2022-03-18 | 運転支援方法及び運転支援装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023175928A1 true WO2023175928A1 (ja) | 2023-09-21 |
Family
ID=88023028
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/012687 WO2023175928A1 (ja) | 2022-03-18 | 2022-03-18 | 運転支援方法及び運転支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2023175928A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020230306A1 (ja) * | 2019-05-15 | 2020-11-19 | 日産自動車株式会社 | 車両の走行制御方法及び走行制御装置 |
| JP2021091282A (ja) * | 2019-12-10 | 2021-06-17 | 日産自動車株式会社 | 車両の走行制御方法および走行制御装置 |
| JP2021160541A (ja) * | 2020-03-31 | 2021-10-11 | 本田技研工業株式会社 | 車両制御装置及び車両制御方法 |
-
2022
- 2022-03-18 WO PCT/JP2022/012687 patent/WO2023175928A1/ja unknown
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020230306A1 (ja) * | 2019-05-15 | 2020-11-19 | 日産自動車株式会社 | 車両の走行制御方法及び走行制御装置 |
| JP2021091282A (ja) * | 2019-12-10 | 2021-06-17 | 日産自動車株式会社 | 車両の走行制御方法および走行制御装置 |
| JP2021160541A (ja) * | 2020-03-31 | 2021-10-11 | 本田技研工業株式会社 | 車両制御装置及び車両制御方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2020230551A1 (ja) | 車両の走行制御方法及び走行制御装置 | |
| JP7143946B2 (ja) | 車両の走行制御方法及び走行制御装置 | |
| JP7140277B2 (ja) | 車両の走行制御方法及び走行制御装置 | |
| US11964668B2 (en) | Vehicle travel control method and travel control device | |
| US11505194B2 (en) | Vehicle travel control method and travel control device | |
| JP7164030B2 (ja) | 車両の走行制御方法及び走行制御装置 | |
| JP7331450B2 (ja) | 車両の走行制御方法及び走行制御装置 | |
| JP7156516B2 (ja) | 車両の走行制御方法及び走行制御装置 | |
| JP7287498B2 (ja) | 運転制御方法及び運転制御装置 | |
| WO2022249470A1 (ja) | 運転支援方法及び運転支援装置 | |
| JP7355057B2 (ja) | 車両用制御装置及び車両用制御方法 | |
| WO2023175928A1 (ja) | 運転支援方法及び運転支援装置 | |
| WO2022249468A1 (ja) | 制限速度認識方法及び制限速度認識装置 | |
| WO2023166623A1 (ja) | 運転支援方法及び運転支援装置 | |
| WO2023175927A1 (ja) | 運転支援方法及び運転支援装置 | |
| WO2023175966A1 (ja) | 車両走行制御方法及び車両走行制御装置 | |
| WO2023162035A1 (ja) | 運転支援方法及び運転支援装置 | |
| WO2023047453A1 (ja) | 運転制御方法及び運転制御装置 | |
| JP7211552B2 (ja) | 車両の走行制御方法及び走行制御装置 | |
| WO2023047452A1 (ja) | 運転制御方法及び運転制御装置 | |
| WO2023089837A1 (ja) | 車両の走行支援方法及び走行支援装置 | |
| WO2023089835A1 (ja) | 車両の走行支援方法及び走行支援装置 | |
| WO2023084657A1 (ja) | 車両制御方法及び車両制御装置 | |
| RU2792474C1 (ru) | Способ управления вождением и устройство управления вождением | |
| RU2780639C1 (ru) | Способ управления движением и устройство управления движением для транспортного средства |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22931242 Country of ref document: EP Kind code of ref document: A1 |