WO2023136302A1 - 穿刺針 - Google Patents
穿刺針 Download PDFInfo
- Publication number
- WO2023136302A1 WO2023136302A1 PCT/JP2023/000657 JP2023000657W WO2023136302A1 WO 2023136302 A1 WO2023136302 A1 WO 2023136302A1 JP 2023000657 W JP2023000657 W JP 2023000657W WO 2023136302 A1 WO2023136302 A1 WO 2023136302A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- puncture needle
- ultrasonic
- plane
- cone
- puncture
- Prior art date
Links
- 238000012986 modification Methods 0.000 description 13
- 230000004048 modification Effects 0.000 description 13
- 230000002093 peripheral effect Effects 0.000 description 6
- 238000012545 processing Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 5
- 238000005520 cutting process Methods 0.000 description 3
- 238000002592 echocardiography Methods 0.000 description 3
- 238000002604 ultrasonography Methods 0.000 description 3
- 238000005422 blasting Methods 0.000 description 2
- 238000005498 polishing Methods 0.000 description 2
- 239000004677 Nylon Substances 0.000 description 1
- 239000004809 Teflon Substances 0.000 description 1
- 229920006362 Teflon® Polymers 0.000 description 1
- 229910001069 Ti alloy Inorganic materials 0.000 description 1
- 239000000788 chromium alloy Substances 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 229910001092 metal group alloy Inorganic materials 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000003672 processing method Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 238000009751 slip forming Methods 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
Images










Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
Definitions
- the present disclosure relates to a puncture needle.
- Patent Document 1 describes an ultrasound-guided puncture needle for puncturing while detecting the position using reflection of ultrasound waves and an indwelling needle having the same.
- This puncture needle has a groove that reflects ultrasonic waves on its outer peripheral surface.
- This groove portion has a first groove portion provided on the outer peripheral surface on the back side of the blade surface, and a second groove portion provided on the outer peripheral surface near the tip portion where the blade surface is formed.
- the first groove extends in the circumferential direction, both ends thereof face the blade surface, and a plurality of the first grooves are provided in the axial direction of the puncture needle.
- Examples of conventional puncture needles include those in which processing (groove processing, dimple processing, blast processing) to reflect ultrasonic waves is performed on the outer peripheral surface of the body of the puncture needle.
- processing to reflect ultrasonic waves is applied to a position different from the needle tip, which is originally intended to be visually recognized, so the position of the needle tip may not be accurately grasped. . Therefore, it is desirable to improve the echo visibility of the tip of the puncture needle.
- the present disclosure has been made in view of such circumstances, and its purpose is to provide a puncture needle with high echo visibility at the tip of the needle.
- the puncture needle according to the present disclosure for achieving the above object is a rod-shaped main body; a cone-shaped conical portion disposed at the tip of the main body; and an ultrasonic reflection structure that is three-dimensionally formed on the side surface of the cone.
- the pyramid portion may have a polygonal pyramid shape in which the side surface includes a plurality of plane portions.
- the ultrasonic reflection structure may be formed avoiding the side portions of the plane portion.
- the surface of the flat portion is a blade region that is arranged along the side portion and in which the ultrasonic reflection structure is not formed; and a reflecting region disposed inside the blade region and having the ultrasonic wave reflecting structure formed thereon.
- the cone portion may include the planar portion on which the ultrasonic reflecting structure is formed and the planar portion on which the ultrasonic reflecting structure is not formed.
- the cone portion may have a triangular pyramid shape.
- the ultrasonic reflection structure may be arranged on the tip side of the cone portion.
- FIG. 1 is a perspective view of a puncture needle according to this embodiment;
- FIG. It is a side view of the puncture needle concerning this embodiment.
- It is a top view of the puncture needle concerning this embodiment.
- FIG. 4 is a diagram for explaining how an ultrasonic wave is reflected by an echo;
- FIG. 4 is a side view of a puncture needle according to Modification 1 of the present embodiment;
- FIG. 11 is a side view of a puncture needle according to Modification 2 of the present embodiment;
- FIG. 11 is a side view of a puncture needle according to Modification 3 of the present embodiment;
- FIG. 11 is a side view of a puncture needle according to Modification 4 of the present embodiment;
- FIG. 11 is a side view of a puncture needle according to Modification 5 of the present embodiment;
- FIG. 10 is a cross-sectional view taken along line XX of FIG. 9;
- FIG. 11 is a top view of another puncture needle;
- FIG. 11 is a top view of another puncture needle;
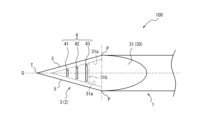
- the puncture needle 100 includes a rod-shaped body portion 1, a cone-shaped cone portion 2 arranged at the tip of the body portion 1, and an ultrasonic wave reflector formed three-dimensionally on the side surface portion 3 of the cone portion 2. a structure 4;
- FIG. 1 is a perspective view of the body part 1 and the conical body part 2 viewed obliquely to the axis G of the body part 1 from the distal end side of the puncture needle 100 .
- FIG. 2 is a side view of the puncture needle 100 viewed from the outer peripheral surface of the main body 1, that is, from a direction perpendicular to the axis G.
- FIG. 3 is a top view of puncture needle 100 viewed in a direction along axis G from the distal end side.
- the main body 1 is, for example, a cylindrical bar.
- the main body 1 can be made of, for example, metal alloys such as stainless steel, titanium alloys and cobalt-chromium alloys, and resins such as Teflon and nylon.
- the body portion 1 may have a space continuously formed along the axis G inside the body portion 1 . That is, the main body part 1 may be formed in a tubular shape with a closed distal end side.
- the cone part 2 is arranged at the tip of the main body part 1 and has a cone shape.
- An example of the pyramidal shape is a conical shape or a polypyramidal shape including a plurality of plane portions on the side surface.
- Examples of the polygonal pyramid shape are a triangular pyramid shape, a square pyramid shape, and a pyramid shape with five or more angles. 1 to 3 illustrate the case where the cone portion 2 has a triangular pyramid shape. That is, the cone part 2 in this embodiment has three plane parts 30 on its side surface.
- the multi-pyramidal cone part 2 such as a triangular pyramid is formed by, for example, cutting or polishing the tip of a rod-shaped material that will be the main body part 1 to form a plane part that will be the plane part 30 of the polygonal pyramid. be able to.
- the corners of the side surfaces of the pyramidal portion 2, that is, the boundary portions between the adjacent planar portions 30, 30 of the side surface of the polygonal pyramid (triangular pyramid in this embodiment) are formed from the vertex T (the tip of the puncture needle 100).
- the blade portion 5 extends toward the side surface portion of the main body portion 1 .
- the side portion 3 is a side portion of the cone portion 2 .
- the side surface portion 3 has three plane portions 30 as described above.
- the planar portion 30 includes a first planar portion 31 on which the ultrasonic reflecting structure 4 is formed and a second planar portion 32 on which the ultrasonic reflecting structure 4 is not formed.
- the plane portion 30 includes one first plane portion 31 and two second plane portions 32 .
- the ultrasonic reflection structure 4 is a structure that changes the direction and intensity of reflected ultrasonic waves W (see FIG. 4).
- the planar portion 30 has a triangular region located on the tip side and a triangular region located behind the triangular region when viewed in a direction perpendicular to its surface. and an elliptical or parabolic region with a part missing located on the end side. Points located on the boundary between the triangular region and the partially elliptical or parabolic region in the outer peripheral shape of the planar portion 30 are shown as boundary points P and P in FIGS. 1 to 3 . there is
- An ultrasonic reflection structure 4 is formed in a partial area of the first plane portion 31 .
- the ultrasonic reflection structure 4 that is, the surface of the first plane portion 31 of the puncture needle 100 in this embodiment, as shown in FIG. A reflecting region 31b in which the ultrasonic wave reflecting structure 4 is formed exists.
- the reflection region 31b (ultrasonic wave reflection structure 4) is preferably arranged on the tip side of the line connecting the boundary points P, P, for example. That is, the reflecting region 31 b (ultrasonic wave reflecting structure 4 ) is preferably arranged on the distal end side of the puncture needle 100 in the cone portion 2 . As a result, echo visibility at the tip of the puncture needle 100 is improved, as will be described later. It should be noted that it is not excluded to further provide the reflecting region 31b on the flat portion 30 on the proximal side of the line connecting the boundary points P, P.
- the reflection region 31b (ultrasonic reflection structure 4) is preferably formed in the first plane portion 31, avoiding the vicinity of the blade portion 5, which is the side portion (periphery). That is, the blade region 31a preferably extends continuously along at least the blade portion 5 . Moreover, the reflective area 31b is preferably arranged inside the blade area 31a in the first plane portion 31 . As a result, it is possible to maintain the sharpness of the blade portion 5 during puncture with the puncture needle 100 and ensure good puncture performance. In addition, in this embodiment, all regions (including the blade region 31a) other than the reflection region 31b in the first plane portion 31 are formed in a planar shape.
- the ultrasonic reflection structure 4 is formed in a three-dimensional shape such as a groove shape, a dimple shape, and an uneven shape such as a rough surface by blasting.
- the ultrasonic wave reflecting structure 4 is preferably formed as a three-dimensional shape such as an uneven shape by recesses such as recesses, recesses, and grooves. It is preferable that the surface of the ultrasonic reflecting structure 4 does not protrude from the other planar portions of the first planar portion 31 . As a result, it is possible to prevent the ultrasound reflection structure 4 from being caught in the living tissue during puncture, which causes resistance, and thus maintains puncture properties.
- the method or processing method for forming the ultrasonic reflection structure 4 is not limited, and laser processing, cutting, rolling, pressing, etc., may be employed.
- the ultrasonic reflection structure 4 has a rough surface.
- the rough surface of the ultrasonic reflection structure 4 in the present embodiment is formed by, for example, performing a blasting process on the reflection region 31b of the first plane portion 31 to form fine unevenness, and then protruding from the plane of the first plane portion 31.
- a rough surface formed by concave portions can be formed by removing the convex portions by polishing or the like.
- the ultrasonic wave reflecting structure 4 Due to its three-dimensional shape, the ultrasonic wave reflecting structure 4, as shown in FIG.
- the reflected wave W2 having a relatively high intensity can be reflected in a direction different from the direction of the reflected wave W1 reflected with the highest intensity in the area of .
- the ultrasonic wave reflecting structure 4 is a reflected wave of the incident ultrasonic wave W, which is directed from the area of the planar portion 30 where the ultrasonic wave reflecting structure 4 is not formed in the direction along the incident direction of the ultrasonic wave W.
- the reflected wave W2 can be reflected in a direction along the incident direction of the ultrasonic wave W with a stronger intensity than the reflected wave W3. That is, by arranging the ultrasonic reflection structure 4 on the first plane portion 31 as the plane portion 30, as shown in FIG. ), the echo visibility is improved when a procedure such as puncture is performed while observing with echo (that is, under echo), so that the position of the needle tip can be accurately grasped by echo.
- lateral grooves 41, 42, and 43 as concave portions formed in a direction perpendicular to the axis G are formed on the first plane portion 31 in the reflection region 31b as the ultrasonic reflection structure 4. indicates if there is The lateral grooves 41, 42, 43 are arranged along the axis G at equal intervals, for example, in this order from the distal end side. The length of the lateral grooves 41 , 42 , 43 in the direction intersecting with the axis G increases in the order of the lateral grooves 41 , 42 , 43 .
- the lateral grooves 41, 42, and 43 are formed in a direction orthogonal to the axis G, so that when a procedure such as puncture is performed while observing with an echo from the proximal end side of the puncture needle 100, the living body punctured by the puncture needle 100 can be displaced.
- Ultrasonic waves emitted as echoes from the body surface side are reflected back to the body surface side with high intensity, improving the visibility of the echoes, thereby making it possible to accurately grasp the position of the needle tip from the echoes.
- FIG. 6 shows a case where the lateral groove 41 in the ultrasonic wave reflecting structure 4 shown in Modification 1 is formed deeper than the other lateral grooves 42 and 43 . This improves the echo visibility of the distal end portion of the puncture needle 100 .
- FIG. 8 shows a case in which dimple-shaped circular concave portions 4a are scattered in the reflection area 31b as the ultrasonic reflection structure 4. As shown in FIG. Even if the shape of the ultrasonic wave reflecting structure 4 is modified in this way, the echo visibility is improved as in the first modification, so that the position of the needle tip can be accurately grasped by the echo.
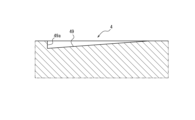
- FIG. 9 shows a case where a triangular groove 49 is formed.
- FIG. 10 shows a cross-sectional view taken along line XX of FIG. As shown in FIGS. 9 and 10, the triangular groove 49 is formed such that the depth of the concave portion gradually increases from the top to the bottom side, that is, from the proximal end side to the distal end side of the puncture needle 100. It is
- a groove wall surface 49a that descends toward the bottom of the groove is formed on the bottom side (tip side) of the triangular groove 49.
- the groove wall surface 49a faces the base end side in the direction along the axis G when the puncture needle 100 is viewed from above.
- the ultrasonic wave W (see FIG. 4) incident from the proximal end side is transmitted to the groove wall surface.
- the reflected wave W2 can be reflected with high intensity in the direction along the incident direction of the ultrasonic wave W (see FIG. 4). Therefore, the visibility of the echo is improved, so that the position of the needle tip can be accurately grasped by the echo.
- the bottom surface of the triangular groove 49 reflects the reflected wave W2 ( (See FIG. 4). This improves echo visibility.
- the groove wall surface 49a preferably extends, for example, from the edge of the upper end of the triangular groove 49 so as to be orthogonal to the first plane portion 31 (see FIG. 9).
- the reflected wave W2 can be reflected in a direction along the incident direction of the ultrasonic wave W (see FIG. 4) with a higher intensity.
- FIG. 11 shows a case where the conical portion 2 of the puncture needle 100 is a quadrangular pyramid.
- the cone portion 2 of the puncture needle 100 has a triangular pyramid shape, and the side surface portion 3 has three plane portions 30.
- the plane portions 30 have the ultrasonic reflection structure 4 is formed, and the second plane portion 32 is not formed with the ultrasonic reflection structure 4.
- the plane portion 30 includes, for example, one first plane portion 31 and two second The case where the two-plane portion 32 is included has been described. However, the plane portion 30 may include more first plane portions 31 than the second plane portions 32 (for example, two first plane portions 31 and one second plane portion 32). .
- the puncture needle 100 can be moved in the circumferential direction (axis center) as necessary.
- the position in the circumferential direction around G) can be grasped by the echo.
- the case where all the plane portions 30 are the first plane portions 31 is not excluded in the case where the cone portion 2 has a polypyramidal shape such as a triangular pyramid shape.
- the cone portion 2 of the puncture needle 100 has a triangular pyramid shape, and the side surface portion 3 has three plane portions 30.
- the plane portions 30 have the ultrasonic reflection structure 4 is formed, and the second plane portion 32 is not formed with the ultrasonic reflection structure 4.
- the plane portion 30 includes, for example, one first plane portion 31 and two second The case where the two-plane portion 32 is included has been described.
- the cone portion 2 may have a polygonal pyramid shape such as a quadrangular pyramid shape.
- FIG. 11 shows a case where the cone portion 2 has a quadrangular pyramid shape. Note that FIG.
- FIG. 11 is a top view of the puncture needle 100 in which the conical portion 2 is shaped like a quadrangular pyramid, viewed along the axis G from the distal end side.
- FIG. 11 shows a case where the first plane portions 31 and the second plane portions 32 are alternately arranged along the circumferential direction on the side portion 3 .
- the pyramid portion 2 of the puncture needle 100 has a polygonal pyramid shape, but as shown in FIG. 12, the pyramid portion 2 can also have a conical shape.
- the ultrasonic reflection structure 4 may be formed on part or all of the side surface portion 3 of the cone portion 2 .
- FIG. 12 shows the case where the ultrasonic reflection structure 4 is formed on a part of the side surface portion 3 of the conical portion 2 .
- the present disclosure can be applied to puncture needles.
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
針先端のエコー視認性の高い穿刺針を提供する。穿刺針は、棒状の本体部と、本体部の先端に配置された錐体状形状の錐体部と、錐体部の側面部に立体的に形成された超音波反射構造と、を備えている。
Description
本開示は、穿刺針に関する。
特開2011-125632号公報(特許文献1)には、超音波の反射を利用して位置を検出しながら穿刺するための超音波ガイド穿刺針及びこれを有する留置針が記載されている。この穿刺針は、外周面に超音波を反射させる溝部を有する。この溝部は、外周面の、刃面の裏側の部位に設けられた第1溝部と、外周面の、刃面が形成された先端部の近傍部位に設けられた第2溝部と、を有する。第1溝部は、周方向に延在して両端が刃面に臨み、且つ、穿刺針の軸線方向に複数設けられている。
エコー下で穿刺する際、手技による穿刺の正確性を向上させるためには針先の位置を正確に把握することが重要である。
従来技術における穿刺針(例えば、特許文献1参照)としては、穿刺針の胴部の外周面に超音波を反射させる加工(溝加工、ディンプル加工、ブラスト加工)を行ったものが例示される。しかし、このような従来技術における穿刺針にあっては、超音波を反射させる加工が本来視認したい針先とは異なる位置に施されているため、針先の位置を正確に把握できない場合がある。そこで、穿刺針に関し、針先端のエコー視認性を高めることが望まれる。
ところで、特許文献1に記載されたような従来技術における穿刺針では、穿刺針の刃面の先端近く且つ刃面に臨む位置に至るまで超音波を反射させる加工が施されたものが存在する。しかし、このような穿刺針のごとく、刃面に臨むような溝が超音波を反射させる加工として施されているような場合、すなわち、組織を切り開く刃の部分にも当該加工が施されている場合には、穿刺針における穿刺性の低下が懸念され場合も有る。そこで、針先端のエコー視認性を高めるにあたり、穿刺性とエコー視認性とを両立させたいというニーズもある。
本開示は、かかる実状に鑑みて為されたものであって、その目的は、針先端のエコー視認性の高い穿刺針を提供することにある。
上記目的を達成するための本開示に係る穿刺針は、
棒状の本体部と、
前記本体部の先端に配置された錐体状形状の錐体部と、
前記錐体部の側面部に立体的に形成された超音波反射構造と、を備えている。
棒状の本体部と、
前記本体部の先端に配置された錐体状形状の錐体部と、
前記錐体部の側面部に立体的に形成された超音波反射構造と、を備えている。
本開示に係る穿刺針では、更に、
前記錐体部は、前記側面が複数の平面部を含む多角錘形状であってもよい。
前記錐体部は、前記側面が複数の平面部を含む多角錘形状であってもよい。
本開示に係る穿刺針では、更に、
前記超音波反射構造は、前記平面部における、辺部分を避けて形成されていてもよい。
前記超音波反射構造は、前記平面部における、辺部分を避けて形成されていてもよい。
本開示に係る穿刺針では、更に、
前記平面部の表面は、
前記辺部分に沿って配置され、前記超音波反射構造が形成されていない刃部領域と、
前記刃部領域よりも内側に配置され、前記超音波反射構造が形成された反射領域と、を含んでもよい。
前記平面部の表面は、
前記辺部分に沿って配置され、前記超音波反射構造が形成されていない刃部領域と、
前記刃部領域よりも内側に配置され、前記超音波反射構造が形成された反射領域と、を含んでもよい。
本開示に係る穿刺針では、更に、
前記錐体部は、前記超音波反射構造が形成された前記平面部と、前記超音波反射構造が形成されていない前記平面部とを含んでもよい。
前記錐体部は、前記超音波反射構造が形成された前記平面部と、前記超音波反射構造が形成されていない前記平面部とを含んでもよい。
本開示に係る穿刺針では、更に、
前記錐体部は、三角錐状であってもよい。
前記錐体部は、三角錐状であってもよい。
本開示に係る穿刺針では、更に、
前記超音波反射構造は、前記錐体部における、先端側に配置されていてもよい。
前記超音波反射構造は、前記錐体部における、先端側に配置されていてもよい。
本開示によれば、針先端のエコー視認性の高い穿刺針を提供することができる。
図面に基づいて、本開示の実施形態に係る穿刺針について説明する。
図1から図3には、本実施形態に係る穿刺針100を示している。穿刺針100は、棒状の本体部1と、本体部1の先端に配置された錐体状形状の錐体部2と、錐体部2の側面部3に立体的に形成された超音波反射構造4と、を備えている。
図1は、穿刺針100の先端側から、本体部1の軸心Gに対して斜め方向に本体部1及び錐体部2の側面を見た斜視図である。図2は、穿刺針100を、本体部1の外周面、すなわち、軸心Gに直交する方向から見た側面図である。図3は、穿刺針100の先端側から、軸心Gに沿う方向で見た上面図である。
図1から図3に示すように、本体部1は、例えば円柱状の棒状である。本体部1は、例えばステンレス、チタン合金、コバルト-クロム合金などの金属合金や、テフロンやナイロンなどの樹脂により形成することができる。本体部1は、本体部1の内部に、軸心Gに沿い連続的に形成された空間を形成されていてもよい。すなわち、本体部1は、先端側が閉塞した筒状に形成される場合がある。
錐体部2は、上述のごとく、本体部1の先端に配置されており、錐体状の形状とされている。錐体状形状の一例は、円錐状や側面に複数の平面部を含む多角錘状の形状である。多角錘状の一例は、三角錐状、四角錘状及び五角以上の錘状の形状である。図1から図3では、錐体部2が三角錐状である場合を例示して図示している。すなわち、本実施形態における錐体部2は、その側面に、三つの平面部30を有している。
三角錐状などの多角錘状の錐体部2は、例えば本体部1となる棒状の素材の先端を切断や研磨などして多角錘の平面部30となる平面部分を形成することにより形成することができる。錐体部2における、側面の角部、すなわち、多角錘(本実施形態では三角錐)形状における側面の隣接する平面部30,30間の境界部は、頂点T(穿刺針100の先端)から本体部1の側面部に向けて延在する刃部5となっている。
側面部3は、錐体部2の側面部分である。本実施形態において、側面部3は、上述のごとく、三つの平面部30を有している。平面部30には、超音波反射構造4が形成された第一平面部31と、超音波反射構造4が形成されていない第二平面部32とが含まれる。本実施形態では、図3に示すように、平面部30は、一つの第一平面部31と二つの第二平面部32とを含んでいる。なお、超音波反射構造4は、後述するように、照射された超音波W(図4参照)が反射する方向と強度を、変更する構造である。
図1から図3に示すように、平面部30は、本実施形態では、その表面に垂直な方向で見た場合、先端側に位置する、三角形状の領域と、この三角形状の領域の後端側に位置する一部が欠けた楕円形状又は放物線状の領域とを含む。平面部30の外周形状における、三角形状の領域と一部が欠けた楕円形状又は放物線状の領域との境界に位置する点を、図1から図3などでは、境界点P,Pとして示している。
第一平面部31の一部の領域には、超音波反射構造4が形成されている。超音波反射構造4は、すなわち、本実施形態における穿刺針100の第一平面部31の表面には、図2に示すように、超音波反射構造4が形成されていない刃部領域31aと、超音波反射構造4が形成された反射領域31bとが存在する。
反射領域31b(超音波反射構造4)は、例えば、境界点P,P間を結ぶ線よりも先端側に配置されるとよい。すなわち、反射領域31b(超音波反射構造4)は、錐体部2における、穿刺針100の先端側に配置されるとよい。これにより、後述するように、穿刺針100の先端部のエコー視認性が向上する。なお、境界点P,P間を結ぶ線よりも基端側の平面部30に反射領域31bをさらに設けることは排除されない。
また、反射領域31b(超音波反射構造4)は、第一平面部31における、辺部分(周縁)である刃部5の近傍を避けて形成されるとよい。すなわち、刃部領域31aは、少なくとも刃部5に沿って、連続的に延在するとよい。また、反射領域31bは、第一平面部31において、刃部領域31aよりも内側に配置されるとよい。これにより、穿刺針100での穿刺時における刃部5の切れ味を維持して良好な穿刺性を担保することができる。なお、本実施形態においては、第一平面部31における、反射領域31b以外の領域(刃部領域31aを含む)は、全て、平面状に形成されている。
超音波反射構造4は、溝形状、ディンプル状、ブラストによる粗面などの凹凸形状などの立体的な形状として形成されている。超音波反射構造4は、凹凸形状などの立体的な形状として、凹み、窪み、溝のような凹部により形成されることが好ましい。超音波反射構造4の表面は、第一平面部31の他の平面部分よりも突出しないことが好ましい。これにより、穿刺時に超音波反射構造4が生体組織に引っ掛かるような、抵抗の発生の原因となることを回避し、穿刺性を維持できる。なお、超音波反射構造4を形成する方法又は加工方法は限定されず、レーザー加工、切削、転造、プレス等、を採用しうる。本実施形態において、超音波反射構造4は、粗面である場合を示している。本実施形態における超音波反射構造4の粗面は、例えば、第一平面部31の反射領域31bにブラスト処理を行って微小凹凸を形成し、その後、第一平面部31の平面よりも突起する凸部を研磨などにより除去した、凹部により形成された粗面とすることができる。
超音波反射構造4は、その立体的な形状により、図4に示すように、入射した超音波Wを、超音波反射構造4が形成されてない平面部30の領域、すなわち、反射領域31b以外の領域が最も大きな強度で反射する反射波W1の方向とは異なる方向に、ある程度大きな強度の反射波W2を反射することができる。
一例として、超音波反射構造4は、入射した超音波Wの反射波であって、超音波反射構造4が形成されてない平面部30の領域から超音波Wの入射方向に沿う方向に向けて反射された反射波W3よりも強い強度で、超音波Wの入射方向に沿う方向に向けて反射波W2を反射することができる。すなわち、平面部30としての第一平面部31に超音波反射構造4を配置することで、図4に示すように、穿刺針100の基端側(穿刺針100を穿刺した生体の体表面側)からエコーで観察しながら(すなわち、エコー下で)穿刺などの手技を行う際、エコー視認性が向上し、これにより針先の位置をエコーで正確に把握することができるようになる。
(変形例の説明)
以下では、上記実施形態で示した超音波反射構造4の他の好ましい構造や配置及びこれら構造や配置のバリエーションについて説明する。
以下では、上記実施形態で示した超音波反射構造4の他の好ましい構造や配置及びこれら構造や配置のバリエーションについて説明する。
(変形例1)
図5には、超音波反射構造4として、反射領域31b内に、第一平面部31上において、軸心Gに直交する方向に形成された凹部としての横溝41,42,43が形成されている場合を示している。横溝41,42,43は、軸心Gに沿って、例えば等間隔で、先端側からこの順に配置されている。横溝41,42,43における、軸心Gに交差する方向の長さは、横溝41,42,43の順に長くなっている。横溝41,42,43が軸心Gに直交する方向に形成されることで、穿刺針100の基端側からエコーで観察しながら穿刺などの手技を行う際、穿刺針100を穿刺した生体の体表面側からエコーで照射した超音波が強い強度でその体表面側に反射するため、エコー視認性が向上し、これにより針先の位置をエコーで正確に把握することができるようになる。
図5には、超音波反射構造4として、反射領域31b内に、第一平面部31上において、軸心Gに直交する方向に形成された凹部としての横溝41,42,43が形成されている場合を示している。横溝41,42,43は、軸心Gに沿って、例えば等間隔で、先端側からこの順に配置されている。横溝41,42,43における、軸心Gに交差する方向の長さは、横溝41,42,43の順に長くなっている。横溝41,42,43が軸心Gに直交する方向に形成されることで、穿刺針100の基端側からエコーで観察しながら穿刺などの手技を行う際、穿刺針100を穿刺した生体の体表面側からエコーで照射した超音波が強い強度でその体表面側に反射するため、エコー視認性が向上し、これにより針先の位置をエコーで正確に把握することができるようになる。
(変形例2)
図6には、変形例1で示した超音波反射構造4における横溝41が、他の横溝42,43よりも深く形成されている場合を示している。これにより、穿刺針100における、最先端部分のエコー視認性が向上する。
図6には、変形例1で示した超音波反射構造4における横溝41が、他の横溝42,43よりも深く形成されている場合を示している。これにより、穿刺針100における、最先端部分のエコー視認性が向上する。
(変形例3)
図7には、超音波反射構造4として、刃部領域31a以外の、境界点P,P間を結ぶ線よりも先端側および基端側の両方の第一平面部31の表面部分を反射領域31bとして、この反射領域31bに、軸心Gに直交する方向に形成された凹部としての横溝41~47が形成されている場合を示している。横溝41~47は、軸心Gに沿って、第一平面部31の先端部から基端部に至り配置されている。軸心Gに交差する方向の長さは、横溝41,42,43,44,45の順に長くなっている。また、横溝45,46,47の順に短くなっていく。このように、第一平面部31の全面にわたり広く、超音波反射構造4を形成することで、第一平面部31について全体的なエコー視認性が向上し、これにより針先の位置をエコーで正確に把握することができるようになる。
図7には、超音波反射構造4として、刃部領域31a以外の、境界点P,P間を結ぶ線よりも先端側および基端側の両方の第一平面部31の表面部分を反射領域31bとして、この反射領域31bに、軸心Gに直交する方向に形成された凹部としての横溝41~47が形成されている場合を示している。横溝41~47は、軸心Gに沿って、第一平面部31の先端部から基端部に至り配置されている。軸心Gに交差する方向の長さは、横溝41,42,43,44,45の順に長くなっている。また、横溝45,46,47の順に短くなっていく。このように、第一平面部31の全面にわたり広く、超音波反射構造4を形成することで、第一平面部31について全体的なエコー視認性が向上し、これにより針先の位置をエコーで正確に把握することができるようになる。
(変形例4)
図8には、超音波反射構造4として、反射領域31b内に、ディンプル状の丸凹部4aを散りばめて形成している場合を示している。超音波反射構造4の形状をこのように変形しても、変形例1などと同様にエコー視認性が向上し、これにより針先の位置をエコーで正確に把握することができるようになる。
図8には、超音波反射構造4として、反射領域31b内に、ディンプル状の丸凹部4aを散りばめて形成している場合を示している。超音波反射構造4の形状をこのように変形しても、変形例1などと同様にエコー視認性が向上し、これにより針先の位置をエコーで正確に把握することができるようになる。
(変形例5)
図9には、超音波反射構造4として、第一平面部31の面に対して垂直に見下ろす視点で見て、反射領域31b内に、先端側が底辺で基端側が頂部となる三角形状の凹部である三角形溝49を形成している場合を示している。図10には、図9のX-X矢視断面図を示している。三角形溝49は、図9、図10に示すように、頂部から底辺側に向かうに連れて、すなわち、穿刺針100における基端側から先端側にかけて、凹部の深さが順次深くなるように形成されている。
図9には、超音波反射構造4として、第一平面部31の面に対して垂直に見下ろす視点で見て、反射領域31b内に、先端側が底辺で基端側が頂部となる三角形状の凹部である三角形溝49を形成している場合を示している。図10には、図9のX-X矢視断面図を示している。三角形溝49は、図9、図10に示すように、頂部から底辺側に向かうに連れて、すなわち、穿刺針100における基端側から先端側にかけて、凹部の深さが順次深くなるように形成されている。
三角形溝49の底辺側(先端側)には、溝の底に向けて下る溝壁面49aが形成されている。溝壁面49aは、穿刺針100の上面視で軸心Gに沿う方向における基端側を向いている。このような溝壁面49aが形成されると、穿刺針100の基端側からエコーで観察しながら穿刺などの手技を行う際、基端側から入射する超音波W(図4参照)を溝壁面49aで反射させて、超音波W(図4参照)の入射方向に沿う方向に向けて反射波W2を強い強度で反射することができ。そのためエコー視認性が向上し、これにより針先の位置をエコーで正確に把握することができるようになる。
また、三角形溝49は、穿刺針100における基端側から先端側にかけて、凹部の深さが順次深くなるように形成されているため、三角形溝49の底面が溝壁面49aからの反射波W2(図4参照)と干渉しにくくなっている。これにより、エコー視認性が向上する。
溝壁面49aは、例えば、三角形溝49の溝の上端の縁部から、第一平面部31(図9参照)に対して直交するように延在させることが好ましい。これにより、超音波W(図4参照)の入射方向に沿う方向に向けて反射波W2(図4参照)を更に強い強度で反射することができるようになる。
以上のようにして、穿刺性とエコー視認性とを両立する穿刺針を提供することができる。
〔別実施形態〕
(1)上記実施形態では、錐体部2が三角錐状である場合を例示視して説明した。しかし、上述のごとく、錐体部2は三角錐状である場合に限られない。図11には、穿刺針100の錐体部2が四角錘である場合を示している。
(1)上記実施形態では、錐体部2が三角錐状である場合を例示視して説明した。しかし、上述のごとく、錐体部2は三角錐状である場合に限られない。図11には、穿刺針100の錐体部2が四角錘である場合を示している。
(2)上記実施形態では、穿刺針100の錐体部2が三角錐状であって、側面部3が三つの平面部30を有しており、平面部30には、超音波反射構造4が形成された第一平面部31と、超音波反射構造4が形成されていない第二平面部32とが含まれており、平面部30は、例えば一つの第一平面部31と二つの第二平面部32とを含んでいる場合を説明した。しかし、平面部30は、第二平面部32よりも、多くの第一平面部31を含む場合(例えば、二つの第一平面部31と一つの第二平面部32とを含む場合)もある。このように、錐体部2の側面部3に音波反射構造4が形成されている部分とされていない部分とを存在させることで、必要に応じて、穿刺針100における、周方向(軸心Gを中心とした周方向)の位置をエコーで把握可能となる。なお、本実施形態では、錐体部2が三角錐状などの多角錘状である場合において、すべての平面部30が第一平面部31である場合は排除されない。
(3)上記実施形態では、穿刺針100の錐体部2が三角錐状であって、側面部3が三つの平面部30を有しており、平面部30には、超音波反射構造4が形成された第一平面部31と、超音波反射構造4が形成されていない第二平面部32とが含まれており、平面部30は、例えば一つの第一平面部31と二つの第二平面部32とを含んでいる場合を説明した。しかし、上述のごとく、錐体部2は四角錘形状などの多角錘形状である場合もある。図11には、錐体部2は四角錘形状である場合を示している。なお、図11は、錐体部2が四角錘形状である穿刺針100を先端側から軸心Gに沿ってみた上面図である。図11では、側面部3に、周方向に沿って、第一平面部31と第二平面部32とが交互に配置されている場合を示している。このように第一平面部31と第二平面部32とを交互に配置することで、穿刺針100における、周方向の位置をエコーでより良く把握可能となる。
(4)上記実施形態では、穿刺針100の錐体部2が多角錘形状である場合を例示して説明したが、図12に示すように、錐体部2を円錐形状とすることもできる。この場合、錐体部2の側面部3の一部又は全部に超音波反射構造4を形成してよい。図12では、錐体部2の側面部3の一部に超音波反射構造4を形成した場合を示している。
なお、上記実施形態(別実施形態を含む、以下同じ)で開示される構成は、矛盾が生じない限り、他の実施形態で開示される構成と組み合わせて適用することが可能であり、また、本明細書において開示された実施形態は例示であって、本開示の実施形態はこれに限定されず、本開示の目的を逸脱しない範囲内で適宜改変することが可能である。
本開示は、穿刺針に適用できる。
1 :本体部
100 :穿刺針
2 :錐体部
3 :側面部
30 :平面部
31 :第一平面部
31a :刃部領域
31b :反射領域
32 :第二平面部
4 :音波反射構造
4a :丸凹部
41 :横溝
42 :横溝
43 :横溝
44 :横溝
45 :横溝
46 :横溝
47 :横溝
49 :三角形溝
5 :刃部
G :軸心
P :境界点
T :頂点
W :超音波
W1 :反射波
W2 :反射波
W3 :反射波
100 :穿刺針
2 :錐体部
3 :側面部
30 :平面部
31 :第一平面部
31a :刃部領域
31b :反射領域
32 :第二平面部
4 :音波反射構造
4a :丸凹部
41 :横溝
42 :横溝
43 :横溝
44 :横溝
45 :横溝
46 :横溝
47 :横溝
49 :三角形溝
5 :刃部
G :軸心
P :境界点
T :頂点
W :超音波
W1 :反射波
W2 :反射波
W3 :反射波
Claims (7)
- 棒状の本体部と、
前記本体部の先端に配置された錐体状形状の錐体部と、
前記錐体部の側面部に立体的に形成された超音波反射構造と、を備えた穿刺針。 - 前記錐体部は、前記側面が複数の平面部を含む多角錘形状である請求項1に記載の穿刺針。
- 前記超音波反射構造は、前記平面部における、辺部分を避けて形成されている請求項2に記載の穿刺針。
- 前記平面部の表面は、
前記辺部分に沿って配置され、前記超音波反射構造が形成されていない刃部領域と、
前記刃部領域よりも内側に配置され、前記超音波反射構造が形成された反射領域と、を含む請求項3に記載の穿刺針。 - 前記錐体部は、前記超音波反射構造が形成された前記平面部と、前記超音波反射構造が形成されていない前記平面部とを含む請求項2から4の何れか一項に記載の穿刺針。
- 前記錐体部は、三角錐状である請求項2から5の何れか一項に記載の穿刺針。
- 前記超音波反射構造は、前記錐体部における、先端側に配置されている請求項1から6の何れか一項に記載の穿刺針。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023574075A JPWO2023136302A1 (ja) | 2022-01-17 | 2023-01-12 | |
| CN202380015783.8A CN118475298A (zh) | 2022-01-17 | 2023-01-12 | 穿刺针 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022-005325 | 2022-01-17 | ||
| JP2022005325 | 2022-01-17 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/768,463 Continuation US20240358401A1 (en) | 2022-01-17 | 2024-07-10 | Puncture needle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023136302A1 true WO2023136302A1 (ja) | 2023-07-20 |
Family
ID=87279170
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/000657 WO2023136302A1 (ja) | 2022-01-17 | 2023-01-12 | 穿刺針 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JPWO2023136302A1 (ja) |
| CN (1) | CN118475298A (ja) |
| WO (1) | WO2023136302A1 (ja) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005334369A (ja) * | 2004-05-27 | 2005-12-08 | Terumo Corp | 穿刺針および穿刺具 |
| JP2011125632A (ja) | 2009-12-21 | 2011-06-30 | Terumo Corp | 超音波ガイド穿刺針及び留置針 |
| WO2012165303A1 (ja) * | 2011-05-27 | 2012-12-06 | オリンパスメディカルシステムズ株式会社 | 超音波用穿刺針 |
| JP2016516469A (ja) * | 2013-03-14 | 2016-06-09 | マフィン・インコーポレイテッドMuffin Incorporated | ルーローの三角形を用いたエコー源性面 |
| JP2017000496A (ja) * | 2015-06-11 | 2017-01-05 | 株式会社片岡製作所 | 針の加工方法、レーザ加工機、針 |
| JP2020534112A (ja) * | 2017-09-18 | 2020-11-26 | アクティブ・ニードル・テクノロジー・リミテッドActive Needle Technology Ltd | 医療装置 |
| CN212853593U (zh) * | 2020-04-13 | 2021-04-02 | 邓薇 | 一种妇产科早期妊娠多胎减胎用超声引导穿刺针 |
| JP2021513444A (ja) * | 2018-02-08 | 2021-05-27 | リマカ メディカル リミテッドLimaca Medical Ltd. | 生検装置 |
-
2023
- 2023-01-12 WO PCT/JP2023/000657 patent/WO2023136302A1/ja active Application Filing
- 2023-01-12 JP JP2023574075A patent/JPWO2023136302A1/ja active Pending
- 2023-01-12 CN CN202380015783.8A patent/CN118475298A/zh active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005334369A (ja) * | 2004-05-27 | 2005-12-08 | Terumo Corp | 穿刺針および穿刺具 |
| JP2011125632A (ja) | 2009-12-21 | 2011-06-30 | Terumo Corp | 超音波ガイド穿刺針及び留置針 |
| WO2012165303A1 (ja) * | 2011-05-27 | 2012-12-06 | オリンパスメディカルシステムズ株式会社 | 超音波用穿刺針 |
| JP2016516469A (ja) * | 2013-03-14 | 2016-06-09 | マフィン・インコーポレイテッドMuffin Incorporated | ルーローの三角形を用いたエコー源性面 |
| JP2017000496A (ja) * | 2015-06-11 | 2017-01-05 | 株式会社片岡製作所 | 針の加工方法、レーザ加工機、針 |
| JP2020534112A (ja) * | 2017-09-18 | 2020-11-26 | アクティブ・ニードル・テクノロジー・リミテッドActive Needle Technology Ltd | 医療装置 |
| JP2021513444A (ja) * | 2018-02-08 | 2021-05-27 | リマカ メディカル リミテッドLimaca Medical Ltd. | 生検装置 |
| CN212853593U (zh) * | 2020-04-13 | 2021-04-02 | 邓薇 | 一种妇产科早期妊娠多胎减胎用超声引导穿刺针 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023136302A1 (ja) | 2023-07-20 |
| CN118475298A (zh) | 2024-08-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CA2747525C (en) | Echogenic enhancement for a needle | |
| JP5138689B2 (ja) | 改良型超音波手術器具 | |
| EP2967498B1 (en) | Echogenic surface | |
| US6322581B1 (en) | Suturing needle for medical use | |
| JP4700057B2 (ja) | 穿刺針 | |
| JPH0370493B2 (ja) | ||
| US5403344A (en) | Multi-faceted surgical needle | |
| JPH02154753A (ja) | 放射角度可変レーザー照射装置 | |
| JPH03289951A (ja) | 刃付縫合針 | |
| JPH0560746B2 (ja) | ||
| EP2995260B1 (en) | Shaped echogenic needle groove | |
| JP2013538128A (ja) | ねじりソノトロード、およびねじりソノトロードを用いた超音波溶着処理プロセス | |
| WO2023136302A1 (ja) | 穿刺針 | |
| US6267774B1 (en) | Surgical knife | |
| US20240358401A1 (en) | Puncture needle | |
| JP2000139931A (ja) | マイクロ縫合針およびその製造方法 | |
| WO2023234011A1 (ja) | 穿刺針 | |
| US10966750B2 (en) | Needle assembly with reverberation feature to facilitate ultrasound guidance of the needle assembly | |
| WO2023136303A1 (ja) | 穿刺針 | |
| US11950803B2 (en) | Needle assembly with reverberation features to facilitate ultrasound guidance | |
| WO2021039743A1 (ja) | 医療用縫合針 | |
| JPWO2023136302A5 (ja) | ||
| WO2019159525A1 (ja) | 穿刺針 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23740310 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023574075 Country of ref document: JP |
|
| ENP | Entry into the national phase |
Ref document number: 2023740310 Country of ref document: EP Effective date: 20240731 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |