WO2023112447A1 - 流体圧アクチュエータ - Google Patents
流体圧アクチュエータ Download PDFInfo
- Publication number
- WO2023112447A1 WO2023112447A1 PCT/JP2022/037853 JP2022037853W WO2023112447A1 WO 2023112447 A1 WO2023112447 A1 WO 2023112447A1 JP 2022037853 W JP2022037853 W JP 2022037853W WO 2023112447 A1 WO2023112447 A1 WO 2023112447A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- tube
- fluid pressure
- sleeve
- pressure actuator
- restraining
- Prior art date
Links
Images



Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B15/00—Fluid-actuated devices for displacing a member from one position to another; Gearing associated therewith
- F15B15/08—Characterised by the construction of the motor unit
- F15B15/10—Characterised by the construction of the motor unit the motor being of diaphragm type
Definitions
- the present invention relates to a fluid pressure actuator, and more specifically to a so-called McKibben type fluid pressure actuator.
- McKibben type a structure having a rubber tube that expands and contracts by air pressure and a sleeve that covers the outer peripheral surface of the tube. It is
- McKibben-type fluid pressure actuator in which the tube and sleeve bend rather than simply contract in the axial direction when the internal pressure of the tube rises (see Patent Document 1).
- a hydraulic actuator that is provided with a restraining member inside a sleeve of the hydraulic actuator, and bends due to the action of the restraining member that resists axial compression of the tube.
- the conventional bending fluid pressure actuator a member having rigidity capable of resisting compression in the axial direction of the tube is used as the restraining member. Therefore, it has not been easy to further increase the flexibility of the fluid pressure actuator in order to use the curved fluid pressure actuator for a robot hand (gripper) or the like. In other words, it was not easy to make the fluid pressure actuator a fluid pressure actuator capable of securing flexibility in a curved state so that a soft or light and easily deformable operation target can be gently grasped without breaking or deforming.
- the present invention provides a curved fluid pressure actuator having a configuration that can ensure flexibility in a curved state that can be used for gently gripping a soft or light and easily deformable operation target when used in a robot hand (gripper) or the like. intended to provide
- a fluid pressure actuator is a tube that expands and contracts with the pressure of a fluid, and a stretchable structure in which fiber cords oriented in a predetermined direction are woven into a sleeve that covers the outer peripheral surface of the tube. and a sealing member that seals an end portion of the tube in the axial direction; and a restraining member that restrains extension along the axial direction of a portion of the.
- the predetermined direction in which the fiber cords of the sleeve are oriented is oriented to elongate when the tube is inflated.
- the restraining member is knitted and integrated with the sleeve. Alternatively, the restraining member is arranged between the sleeve and the tube.
- the bendable fluid when used in a robot hand (gripper) or the like, has a configuration that can ensure flexibility in a curved state that can be used for gently gripping an operation target that is soft or light and easily deformed.
- a pressure actuator can be provided.
- FIG. 1(a) is an exploded perspective view of a fluid pressure actuator according to one embodiment
- FIG. 1(b) is an enlarged perspective view showing a part of a sleeve in which a restraining member is integrated by being woven into the sleeve.
- 2A and 2B are development views of a sleeve used in the hydraulic actuator
- FIG. 2A is a diagram showing a state before the hydraulic actuator is extended
- FIG. 2B is a state in which the hydraulic actuator is stretched.
- FIG. 3A and 3B are cross-sectional views along the axial direction of the fluid pressure actuator
- FIG. 3A is a cross-sectional view showing the state before the fluid pressure actuator is bent by the fluid pressure
- FIG. 10 is a cross-sectional view showing a state after applying fluid pressure to the fluid pressure actuator to bend it.
- FIG. 4 is an enlarged exploded cross-sectional view of a state before caulking in the vicinity of a sealing member of a fluid pressure actuator according to a modification.
- FIG. 5 is an exploded perspective view of a fluid pressure actuator according to a modification.
- FIG. 1(a) is an exploded perspective view of a fluid pressure actuator according to one embodiment.
- FIG. 1(b) is an enlarged perspective view showing an enlarged part of the sleeve in which the restraint member is woven into the sleeve and integrated.
- the fluid pressure actuator 10 is made by weaving a tube 20 that expands and contracts with the pressure of a fluid and fiber cords 31 that are oriented in a predetermined direction (predetermined weaving angle) ⁇ 1. and a pair of sealing members 40 for sealing both ends 21 of the tube 20 in the axial direction XA.
- the fluid pressure actuator 10 of the embodiment As a basic characteristic of the fluid pressure actuator 10 of the embodiment, when the fluid pressure inside the tube 20 is increased, the tension of the fiber cords 31 forming the sleeve 30 restricts radial expansion of the fluid pressure actuator 10 . Extends in the axial direction XA. Then, when the fluid pressure in the tube 20 is lowered, the dimension in the axial direction XA is restored. Such a change in shape allows the fluid pressure actuator 10 to function as an actuator.
- Such a fluid pressure actuator 10 is a so-called McKibben type fluid pressure actuator, and can be suitably used for artificial muscles.
- the pair of sealing members 40 may be provided with a connection portion (not shown) or the like that is connected to a member or the like to be connected.
- the extension in the axial direction XA is restricted (restricted or A restraining member 50 (which may be called a restriction, hereinafter the same) is provided in a part of the fluid pressure actuator 10 in the circumferential direction.
- a restraining member 50 which may be called a restriction, hereinafter the same
- the fluid pressure actuator 10 can bend (curl) in an orthogonal direction orthogonal to the axial direction XA, that is, in the axial direction XA.
- the fluid used to drive the fluid pressure actuator 10 may be gas such as air, or liquid such as water or mineral oil.
- the hydraulic actuator 10 can have a high durability that can withstand hydraulic actuation in which high pressure is applied to the tube 20 and the sleeve 30 . Further, when a tube having a thickness or a material capable of being driven by a gas such as air at a low pressure is used as the tube 20 of the fluid pressure actuator 10, flexibility of the fluid pressure actuator 10 is ensured.
- the fluid pressure actuator 10 having such a tube 20 can be suitably used for gently grasping a soft or light, easily deformable object to be manipulated.
- each sealing member 40 includes a sealing member body 41 and a crimping member 43 .
- the sealing member main body 41 seals the end 21 of the tube 20 in the axial direction XA.
- the crimping member 43 crimps the tube 20 and the sleeve 30 together with the sealing member main body 41 .
- an indentation which is a mark resulting from caulking of the caulking member 43 by a jig, may be formed.
- the sealing member main body 41 of at least one sealing member 40 of the pair of sealing members 40 is provided with a connection port to which a hose (pipe line) connected to the driving pressure source of the fluid pressure actuator 10 is attached. .
- the fluid pressure inside the tube 20 is controlled by the fluid that flows into and out of the fluid pressure actuator 10 through the fluid passage 45 communicating with this connection port, and the tube 20 of the fluid pressure actuator 10 expands and contracts.
- a driving pressure source for the fluid pressure actuator 10 is, for example, a gas or liquid compressor.
- the fluid pressure actuator 10 is composed of the tube 20, the sleeve 30, the pair of sealing members 40, and the restraining member 50, as described above. be.
- the tube 20 is a cylindrical body that expands or contracts due to fluid pressure.
- the tube 20 is made of an elastic material such as butyl rubber because it is repeatedly expanded and contracted by the fluid.
- the elastic material is at least one selected from the group consisting of NBR (nitrile rubber) having high oil resistance, hydrogenated NBR, chloroprene rubber, and epichlorohydrin rubber. is preferred.
- FIG. 2 is an exploded view of the sleeve 30 used in the fluid pressure actuator 10.
- FIG. 2(a) is an exploded view showing a state before the hydraulic actuator 10 expands.
- FIG. 2(b) is a developed view showing a state in which the fluid pressure actuator 10 is extended.
- the sleeve 30 is cylindrical and covers the outer peripheral surface of the tube 20 in the fluid pressure actuator 10 .
- the sleeve 30 is oriented in a predetermined direction (predetermined braiding angle) ⁇ 1 with respect to the axial direction (axial direction of the fluid pressure actuator 10) XA of the tube 20 before the internal fluid pressure is increased.
- It is a stretchable structure in which the fiber cords 31 are woven.
- the fiber cords 31 are woven in a structure in which oriented fiber cords 31 intersect to repeat rhombic shapes. By having such a shape, the sleeve 30 is pantograph-deformed as shown in FIGS.
- the sleeve 30 crimped to the sealing member 40 together with the tube 20 has a braid angle of 54.7 deg. when the fluid pressure actuator 10 is driven. Drive to converge. Therefore, when the braid angle of the fluid pressure actuator 10 before driving is smaller than 54.7 degrees, the fluid pressure actuator 10 contracts in the axial direction. When the braid angle is greater than 54.7 degrees, the fluid pressure actuator 10 extends in the axial direction.
- the orientation of the fiber cords 31 of the sleeve 30 before expansion and contraction is relative to the axial direction XA of the fluid pressure actuator 10 before pressurization. It is knitted so as to form a predetermined knitting angle ⁇ 1 greater than 54.7 degrees.
- the orientation of the fiber cords 31 that regulate deformation of the tube 20 due to changes in the internal fluid pressure is such that the fluid pressure actuator 10 extends in a predetermined direction (predetermined braiding angle) ⁇ 1 when the tube 20 expands.
- the fiber cord 31 is woven into the sleeve 30 such that the braiding angle ⁇ 1 is 60 degrees to 80 degrees.
- the fiber cord 31 constituting the sleeve 30 it is preferable to use a fiber cord of aromatic polyamide (aramid fiber) or polyethylene terephthalate (PET).
- the cord is not limited to this type of fiber cord, and may be, for example, a cord of high-strength fiber such as PBO fiber (polyparaphenylenebenzobisoxazole).
- the restraint member 50 is provided in a part of the tube 20 in the circumferential direction from one end side to the other end side in the axial direction XA. Both ends of the restraining member 50 are crimped to the sealing member 40 together with the tube 20 and the sleeve 30 .
- the restraint member 50 is a member having a tensile strength capable of resisting the expansion drive of the fluid pressure actuator 10 .
- the restraining member 50 is composed of a restraining fiber cord 51 that is woven and integrated with the sleeve 30, as shown in FIG. 1(b).
- the restraining fiber cord 51 included in the restraining member 50 is crimped to the sealing member 40 while being integrated with the sleeve 30 .
- the constraining fiber cords 51 are woven into the sleeve 30 so as to intersect the fiber cords 31 at positions where the fiber cords 31 of the sleeve 30 intersect with each other while being integrated with the sleeve 30 .
- the restraining fiber cord 51 is not particularly limited as long as it is selected according to the size of the fluid pressure actuator 10 and the required generated force. In other words, the restraining fiber cord 51 only needs to have a tensile strength that can resist the extension drive of the fluid pressure actuator 10 . Also, the material of the restraining fiber cord 51 is not particularly limited. Typically, the material of the constraining fiber cord 51 may be selected from among fiber cords that can be used for the fiber cord 31 constituting the sleeve 30 in consideration of the desired tensile strength and the like. That is, the restraining fiber cord 51 may be a fiber cord made of the same material as the fiber cord 31, or a fiber cord different from the fiber cord 31 may be selected.
- the sealing member 40 seals the end portion 21 of the tube 20 in the axial direction XA of the fluid pressure actuator 10 .
- the sealing member 40 is composed of a sealing member main body 41 and a caulking member 43 .
- the sealing member body 41 is inserted through the tubular tube 20 .
- the sealing member main body 41 has a head portion larger than the inner diameter of the tube 20 and a body portion having an outer diameter that allows insertion into the inner diameter of the tube 20 .
- the body portion is inserted through the tube 20 .
- a metal such as stainless steel can be suitably used as the sealing member main body 41, but the material is not limited to such a metal.
- a hard plastic material or the like may be used as the sealing member main body 41 .
- the crimping member 43 crimps the tube 20 inserted through the sealing member main body 41 , the sleeve 30 covering the outer peripheral surface of the tube 20 , and the binding member 50 woven into and integrated with the sleeve together with the sealing member main body 41 .
- the caulking member 43 is provided on the outer periphery of the portions of the tube 20, the sleeve 30, and the restraining member 50 that are inserted into the sealing member main body 41, and connects these members 20, 30, and 50 to the sealing member main body. Crimp to 41.
- the caulking member 43 metals such as aluminum alloy, brass, and iron can be used.
- an indentation may be formed in the crimping member 43 .
- the sealing member 40 may include a locking ring (not shown) that locks the sleeve 30 and the restraining member 50 to the sealing member main body 41 .
- the sleeve 30 and the restraining member 50 may be folded radially outward via the locking ring.
- the shape of the locking ring may be a shape that can be engaged with the sealing member main body 41 .
- materials such as metals and hard plastic materials similar to those of the sealing member main body 41, natural fibers (threads of natural fibers), rubber (for example, O-rings), and the like can be used. can.
- FIG. 3 is a cross-sectional view along the axial direction XA of the fluid pressure actuator. Specifically, FIG. 3A is a cross-sectional view showing a state before the fluid pressure actuator is bent by the fluid pressure. FIG. 3(b) is a cross-sectional view showing a state after the fluid pressure actuator is bent by applying fluid pressure.
- the tube 20 is inserted through the trunk portion of the sealing member main body 41 .
- the tube 20 , the sleeve 30 covering the outer peripheral surface of the tube 20 , and the restraining member 50 woven into the sleeve 30 are crimped to the sealing member main body 41 by a crimping member 43 .
- the restraint member 50 is provided only partially in the circumferential direction of the tube 20 (see FIG. 1, for example).
- the restraining member 50 is provided from one end side to the other end side in the axial direction XA of the tube 20 and the sleeve 30 .
- the restraint member 50 may be provided from the sealing member 40 on one end side of the tube 20 in the axial direction XA to the sealing member 40 on the other end side. good.
- the restraining member 50 does not necessarily have to be provided completely from the sealing member 40 on the one end side to the sealing member 40 on the other end side. Any one of the sealing members 40 (particularly, the side of the sealing member 40 that is likely to become a free end when bent) does not need to have the binding member 50 extending therefrom. In such a case, for example, the end of the restraining member 50 that does not extend to the sealing member 40 may be fixed to, for example, a part of the tube 20 or the sleeve 30 on the other end.
- the crimping member 43 is larger than the outer diameter of the trunk portion of the sealing member body 41, and is crimped by a jig after being inserted through the trunk portion.
- the crimping member 43 crimps the tube 20 and the sleeve 30 together with the sealing member main body 41 .
- FIGS. 3A and 3B are explanatory diagrams of the behavior of the fluid pressure actuator 10.
- FIG. The fluid pressure actuator 10 shown in FIGS. 3(a) and 3(b) has a fixed end to which the sealing member 40 on the left side of the drawing is fixed.
- a sealing member 40 on the other end side, which is arranged on the right side of the fluid pressure actuator 10 in the drawing, is a free end in a freely movable state.
- the restricting member 50 extends in a part of the circumferential direction (upper side in FIGS. 3A and 3B) where the restricting member 50 of the tube 20 whose outer peripheral surface is covered with the sleeve 30 is arranged. Therefore, the elongation of the tube 20 is inhibited.
- the tube 20 expands at a portion facing a portion of the tube 20 in the circumferential direction (lower side in FIGS. 3(a) and 3(b)).
- the length of the side on which the restraining member 50 is arranged (the upper side in FIGS. 3(a) and 3(b)) is , 3(b) below).
- the free end side (right side in FIG. 3(b)) curves toward the side where the restraining member 50 is arranged (upper side in FIG. 3(b)).
- the fluid pressure actuator 10 has the following features.
- the restraining member 50 is composed of the restraining fiber cord 51 as in the fluid pressure actuator 10 of the present embodiment
- the deformable parts of the fluid pressure actuator 10 such as the tube 20, the sleeve 30, and the restraining member 50 are plastically deformed. Constructed of difficult materials. For this reason, the fluid pressure actuator 10 has flexibility such that it does not undergo plastic deformation even when it comes into contact with another rigid body during operation.
- members with high rigidity are not used in the portions where the fluid pressure actuator 10 is deformed, such as the tube 20, the sleeve 30, and the restraining member 50, soft or light and easily deformable operation targets can be gently grasped without being destroyed or deformed. It works even better.
- the sleeve 30 and the restraint member 50 exhibit integral behavior. become.
- the configuration in which the restraining member 50 is integrated with the sleeve 30 facilitates control of the curved state of the fluid pressure actuator 10 .
- the restraining member 50 is knitted and integrated with the sleeve 30 .
- the configuration of the restraining member is not limited to this configuration.
- the restraining member and the sleeve may be separate bodies.
- the restraining member 150 and the sleeve 130 are separate, the restraining member 150 is arranged between the sleeve 130 and the tube 120 as shown in FIG.
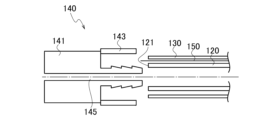
- FIG. 4 is an enlarged exploded cross-sectional view of a state before caulking in the vicinity of the sealing member 140 of the fluid pressure actuator according to the modification in which the restraining member 150 and the sleeve 130 are separately formed.
- the tube 120 is inserted through the body of a sealing member 140 having a sealing member main body 141 in which a fluid passage 145 is formed and a crimping member 143 .
- the crimping member 143 crimps the tube 120 , the sleeve 130 and the restraining member 150 together with the sealing member main body 141 .
- a composite tape material in which the restraining fiber cord 151 and a thermoplastic resin tape or the like are integrated may be used as the restraining member 150 .
- the binding member 150 which is a composite tape material, is provided from one end side to the other end side of the tube 120 in the axial direction XA.
- the binding fiber cord 151 of the composite tape material is also provided from one end side to the other end side in the axial direction XA of the tube 120 .
- the constraining fiber cord 151 may be sandwiched and integrated between the thermoplastic resin tapes, and a part of the constraining fiber cord 151 may be in contact with or embedded in the thermoplastic resin tape.
- the material of the constraining fiber cord 151 is selected from fiber cords that can be used for the fiber cord 31 in consideration of the desired tensile strength and the like. I wish I could.
- thermoplastic resin tape Materials constituting the thermoplastic resin tape are not particularly limited, but examples include polypropylene (PP), high density polyethylene (HDPE), medium density polyethylene (MDPE), low density polyethylene (LDPE), polystyrene (PS), polyethylene terephthalate (PETP), polybutylene terephthalate (PBTP), polyvinylidene fluoride (PVDF), polyamide 6 (PA6), polyamide 66 (PA66), and the like.
- PP polypropylene
- HDPE high density polyethylene
- MDPE medium density polyethylene
- LDPE low density polyethylene
- PS polystyrene
- PETP polyethylene terephthalate
- PBTP polybutylene terephthalate
- PVDF polyvinylidene fluoride
- PA6 polyamide 6
- PA66 polyamide 66
- the binding member 150 is a composite tape material in which the binding fiber cords 151 and a thermoplastic resin tape or the like are integrated, as shown in FIG. They may be provided from one end side to the other end side in the direction XA and may be arranged so as to cross each other.
- the restraining member may include a plurality of intersecting fiber cords for restraining, and the plurality of fiber cords for restraining 51 may be woven into the sleeve 30 so as to intersect each other.
- the circumferential part of the tubes 20 and 120 on which the restraining members 50 and 150 are arranged refers to the circumferential length in the circumferential direction. It may be in the range of 1/3 or less.
- the restraint member includes a plurality of restraining fiber cords 51 crossing each other, deformation of the fluid pressure actuator 10 that bends so that tension of only some of the restraining fiber cords 51 increases is suppressed, and the fluid pressure actuator 10 is restrained. It can be curved along a predetermined direction in which member 50 extends.
- the restraining member 150 that is separate from the sleeve 130 can be used.
- a leaf spring that is flat or curved to follow the cross-sectional shape of the tube 120 may be used. Even when a leaf spring is used as the restraint member 150, the restraint member 150 is provided in a part of the tube 120 in the circumferential direction.
- a leaf spring is used as the restraining member 150, by arranging the restraining member 150 between the sleeve 130 and the tube 120, it is possible to obtain a bending fluid pressure actuator with increased rigidity.
- the dimensions of the leaf spring are not particularly limited as long as they are selected according to the size of the fluid pressure actuator, the required generated force, and the like.
- the material of the leaf spring is also not particularly limited, but typically, any material such as metal such as stainless steel that is easy to bend and has high resistance to compression may be used.
- the restraint member 150 may be formed of a carbon fiber reinforced plastic (CFRP) sheet or the like. Since CFRP is less likely to be plastically deformed than metal, even when used as the restraining member 150, the fluid pressure actuator easily returns to its original straight state after bending.
- CFRP carbon fiber reinforced plastic
- the width of the leaf spring as the restraint member 150 is not particularly limited, but if the outer diameter of the tube 120 is used as a reference, it may be approximately half the outer diameter.
- the outer diameter of the tube 120 is 11 mm
- the length of the tube 120 before expansion is 185 mm
- the width of the restraint member 150 (leaf spring) is 6 mm
- the thickness is about 0.5 mm.
- the restraint members 50 and 150 are provided on a part of the tubes 20 and 120 in the circumferential direction (1/3 or less of the circumferential length).
- the restraining member may be provided in a range of about half (half the circumference) of the tubes 20 and 120 in the circumferential direction.
- the restraining members 50, 150 are provided from one end side to the other end side in the axial direction XA of the tubes 20, 120 and sleeves 30, 130.
- the restraining members 50 and 150 do not necessarily have to be provided from one end to the other end in the axial direction XA as long as they are provided over substantially the entire region in the axial direction XA.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Actuator (AREA)
Abstract
流体圧アクチュエータ(10)は、流体の圧力によって膨張および収縮するチューブ(20)と、所定方向(θ1)に配向された繊維コード(31)を編み込んだ伸縮性を有する構造体でありチューブ(20)の外周面を覆うスリーブ(30)と、チューブ(20)の軸方向(XA)における端部(21)を封止する封止部材(40)と、チューブ(20)の周方向の一部に軸方向(XA)における一端側から他端側に亘って設けられチューブ(20)の周方向の一部における軸方向に沿った伸長を拘束する拘束部材(50)と、を備える。軸方向(XA)にチューブ(20)が延びた状態で、スリーブ(30)の繊維コード(31)が配向する所定方向(θ1)が、チューブ(20)が膨張すると伸長する配向にされている。拘束部材(50)は、スリーブ(30)に編み込まれて一体化される、又はスリーブ(30)とチューブ(20)との間に配置される。
Description
本発明は、流体圧アクチュエータに関し、具体的に、いわゆるマッキベン型の流体圧アクチュエータに関する。
従来、気体または液体を用いてチューブを膨張及び収縮させる流体圧アクチュエータとして、空気圧によって膨張、収縮するゴム製のチューブと、チューブの外周面を覆うスリーブとを有する構造(いわゆるマッキベン型)が広く用いられている。
また、チューブの内圧が上昇した場合に、チューブ及びスリーブが単純に軸方向に収縮するのではなく湾曲する、マッキベン型の流体圧アクチュエータも知られている(特許文献1参照)。具体的には、流体圧アクチュエータのスリーブの内側に拘束部材を備え、チューブの軸方向への圧縮に対して抵抗する該拘束部材の作用によって湾曲する流体圧アクチュエータが知られている。
しかし、従来の湾曲する流体圧アクチュエータでは、拘束部材として、チューブの軸方向の圧縮に対して抵抗可能な剛性を備える部材が用いられる。このため、湾曲する流体圧アクチュエータをロボットハンド(グリッパ)等に用いるために、流体圧アクチュエータの柔軟性をさらに高めることは容易でなかった。つまり、流体圧アクチュエータを、軟らかい或いは軽くて変形しやすい操作対象を破壊、変形させることなく優しく掴み得る柔軟性を湾曲状態で確保し得る流体圧アクチュエータにすることは容易でなかった。
本発明では、ロボットハンド(グリッパ)等に用いた場合に、軟らかい或いは軽くて変形しやすい操作対象を優しく掴む作業に用い得る柔軟性を湾曲状態で確保できる構成を備えた湾曲する流体圧アクチュエータを提供することを目的とする。
本発明の実施形態に係る流体圧アクチュエータは、流体の圧力によって膨張および収縮するチューブと、所定方向に配向された繊維コードを編み込んだ伸縮性を有する構造体であり前記チューブの外周面を覆うスリーブと、前記チューブの軸方向における端部を封止する封止部材と、前記チューブの周方向の一部に前記軸方向における一端側から他端側に亘って設けられ、前記チューブの前記周方向の一部における前記軸方向に沿った伸長を拘束する拘束部材と、を備える。前記スリーブの前記繊維コードが配向する前記所定方向が、前記チューブが膨張すると伸長する配向にされている。前記拘束部材は、前記スリーブに編み込まれて一体化されている。又は、前記拘束部材は、前記スリーブと前記チューブとの間に配置されている。
上記構成によれば、ロボットハンド(グリッパ)等に用いた場合に、軟らかい或いは軽くて変形しやすい操作対象を優しく掴む作業に用い得る柔軟性を湾曲状態で確保できる構成を備えた湾曲可能な流体圧アクチュエータを提供できる。
以下、実施形態を図面に基づいて説明する。なお、同一の機能や構成には、同一または類似の符号を付して、その説明を適宜省略する。
(1)流体圧アクチュエータの全体概略構成
図1(a)は、一実施形態に係る流体圧アクチュエータの分解斜視図である。図1(b)は、拘束部材がスリーブに編み込まれて一体化しているスリーブの一部分を拡大した拡大斜視図である。
図1(a)は、一実施形態に係る流体圧アクチュエータの分解斜視図である。図1(b)は、拘束部材がスリーブに編み込まれて一体化しているスリーブの一部分を拡大した拡大斜視図である。
図1(a)に示すように、流体圧アクチュエータ10は、流体の圧力によって膨張および収縮するチューブ20と、所定方向(所定の編角)θ1に配向された繊維コード31を編み込んだ伸縮性を有する構造体でありチューブ20の外周面を覆うスリーブ30と、チューブ20の軸方向XAにおける両端部21を封止する一対の封止部材40と、を備える。
実施形態の流体圧アクチュエータ10は、基本的な特性として、チューブ20内の流体圧を上昇させると、スリーブ30を形成する繊維コード31の張力で径方向の膨張を制限しつつ流体圧アクチュエータ10の軸方向XAに伸長する。そして、チューブ20内の流体圧を低下させると、軸方向XAの寸法が復元する。このような形状変化によって、流体圧アクチュエータ10は、アクチュエータとしての機能を発揮する。
このような流体圧アクチュエータ10は、いわゆるマッキベン(McKibben)型の流体圧アクチュエータであり、人工筋肉用などとして好適に用い得る。一対の封止部材40には、連結対象となる部材などに連結される連結部(不図示)等が設けられてもよい。
本実施形態では、図1(a)、1(b)に示すように、このような基本的な特性を有するマッキベン型の流体圧アクチュエータを用いつつ、軸方向XAの伸長を拘束する(規制または制限すると呼んでもよい、以下同)拘束部材50を、流体圧アクチュエータ10の周方向の一部に設けている。この構成により、流体圧アクチュエータ10は、軸方向XAに直交する直交方向、つまり、軸方向XAから湾曲(カール)することができる。
流体圧アクチュエータ10の駆動に用いられる流体は、空気などの気体、または水、鉱物油などの液体のどちらでもよい。流体圧アクチュエータ10は、チューブ20およびスリーブ30に高い圧力が掛かる油圧駆動にも耐え得る高い耐久性を有し得る。また、流体圧アクチュエータ10のチューブ20として、空気などの気体等による低い圧力で駆動可能な肉厚或いは材質のチューブを用いた場合、流体圧アクチュエータ10の柔軟性が確保される。このようなチューブ20を備えた流体圧アクチュエータ10は、軟らかい或いは軽くて変形しやすい操作対象を優しく掴む作業に好適に用い得る。
一対の封止部材40は、軸方向XAにおけるチューブ20の両端部21を封止する。具体的に、各封止部材40は、封止部材本体41及びかしめ部材43を含む。封止部材本体41は、チューブ20の軸方向XAの端部21を封止する。また、かしめ部材43は、チューブ20およびスリーブ30を封止部材本体41とともにかしめる。かしめ部材43の外周面には、治具によってかしめ部材43がかしめられた痕である圧痕が形成されてもよい。
一対の封止部材40の少なくとも一方の封止部材40の封止部材本体41には、流体圧アクチュエータ10の駆動圧力源と接続されたホース(管路)を取り付けられる接続口が設けられている。この接続口に連通する流体通路45を介して流体圧アクチュエータ10に流入、排出される流体によって、チューブ20内部の流体圧が制御され、流体圧アクチュエータ10のチューブ20が膨張、収縮する。なお、流体圧アクチュエータ10の駆動圧力源は、例えば気体や液体のコンプレッサである。
(2)流体圧アクチュエータ10の構成
図1(a)に示すように、流体圧アクチュエータ10は、上述したように、チューブ20、スリーブ30、一対の封止部材40、及び拘束部材50によって構成される。
図1(a)に示すように、流体圧アクチュエータ10は、上述したように、チューブ20、スリーブ30、一対の封止部材40、及び拘束部材50によって構成される。
チューブ20は、流体の圧力によって膨張あるいは収縮する円筒状の筒状体である。チューブ20は、流体による膨張及び収縮を繰り返すため、ブチルゴムなどの弾性材料によって構成される。また、流体圧アクチュエータ10を油圧駆動する場合、前記弾性材料を耐油性が高いNBR(ニトリルゴム)、または水素化NBR、クロロプレンゴム、及びエピクロロヒドリンゴムからなる群より選択される少なくとも一種とすることが好ましい。
図2は、流体圧アクチュエータ10に用いるスリーブ30の展開図である。図2(a)は、流体圧アクチュエータ10が伸長する前の状態を示す展開図である。図2(b)は、流体圧アクチュエータ10が伸長した状態を示す展開図である。
図1(a)に示すように、スリーブ30は、円筒状であり、流体圧アクチュエータ10において、チューブ20の外周面を覆う。図2(a)に示すように、スリーブ30は、内部の流体圧を上昇させる前のチューブ20の軸方向(流体圧アクチュエータ10の軸方向)XAに対する所定方向(所定の編角)θ1に配向された繊維コード31を編み込んだ伸縮性を有する構造体である。繊維コード31は、配向された繊維コード31が交差することによって菱形の形状が繰り返す構造に編まれている。スリーブ30は、このような形状を有することによって、図2(a),2(b)に示されるようにパンタグラフ変形し、チューブ20の膨張及び収縮を規制しつつ追従する。
なお、マッキベン型の流体圧アクチュエータ10において、チューブ20とともに封止部材40にかしめ付けられたスリーブ30は、流体圧アクチュエータ10の駆動時に、編み込まれた繊維コード31の編角が54.7deg.に収束するように駆動する。このため、流体圧アクチュエータ10の駆動前の編角が54.7deg.より小さい場合、流体圧アクチュエータ10は軸方向に収縮する。そして、編角が54.7deg.より大きい場合、流体圧アクチュエータ10は軸方向に伸長する。
本実施形態に用いられているスリーブ30は、図2(a)に示すように、伸縮前のスリーブ30の繊維コード31の配向が、加圧前の流体圧アクチュエータ10の軸方向XAに対して54.7deg.よりも大きな所定の編角θ1をなすように編まれている。つまり、内部の流体圧の変化に伴うチューブ20の変形を規制する繊維コード31の配向は、チューブ20が膨張すると流体圧アクチュエータ10が伸長する所定方向(所定の編角)θ1となるように配向されている。具体的に、繊維コード31は、編角θ1が60deg.~80deg. となるようにスリーブ30に編まれている。
図2(b)に示すように、このスリーブ30を用いた流体圧アクチュエータ10は、チューブ20内の流体圧を上昇させた時にスリーブ30の編角θ2が伸長前の編角θ1よりも小さくなることで(54.7deg.に近づくことで)伸長駆動する。
スリーブ30を構成する繊維コード31としては、芳香族ポリアミド(アラミド繊維)やポリエチレンテレフタラート(PET)の繊維コードを用いることが好ましい。但し、このような種類の繊維コードに限定されるものではなく、例えば、PBO繊維(ポリパラフェニレンベンゾビスオキサゾール)などの高強度繊維のコードでもよい。
また、本実施形態では、図1(a)に示すように、拘束部材50が、チューブ20の周方向の一部に、軸方向XAにおける一端側から他端側に亘って設けられている。拘束部材50は、チューブ20、スリーブ30とともに両端が封止部材40にかしめられている。
拘束部材50は、流体圧アクチュエータ10の伸長駆動に対して抵抗し得る引張り強度を備えた部材である。
チューブ20内の流体圧を高めて流体圧アクチュエータ10を伸長駆動した場合、拘束部材50の両端が封止部材40にかしめられているため、チューブ20が発生させる一対の封止部材40間の距離が伸びる方向に働く力に対して、拘束部材50が抵抗する。この作用により、拘束部材50が配置されたチューブ20の外周上の一部の周方向位置では、チューブ20の膨張が妨げられ、流体圧アクチュエータ10の伸長が拘束される。この結果、流体圧アクチュエータ10は、流体圧の上昇に伴い、軸方向XAに沿って伸長せずに湾曲(カール)する。
本実施形態において、拘束部材50は、図1(b)に示すように、スリーブ30に編み込まれて一体化された拘束用繊維コード51で構成されている。そして、拘束部材50に含まれる拘束用繊維コード51は、スリーブ30に一体化された状態で封止部材40にかしめられている。なお、スリーブ30と一体化された状態で、拘束用繊維コード51は、スリーブ30の繊維コード31同士が交差する位置で繊維コード31と交差するように、スリーブ30に編み込まれている。
拘束用繊維コード51は、流体圧アクチュエータ10のサイズ、及び必要とされる発生力などに応じて選択されればよく、特に限定されない。つまり、拘束用繊維コード51は、流体圧アクチュエータ10の伸長駆動に対して抵抗し得る引張り強度を有していればよい。また、拘束用繊維コード51の材料についても特に限定されない。典型的には、スリーブ30を構成する繊維コード31に使用し得る繊維コードの中から所望の引張り強度などを考慮して、拘束用繊維コード51の材料が選択されればよい。つまり、拘束用繊維コード51は、繊維コード31と同じ材料の繊維コードであってよく、繊維コード31と異なる繊維コードが選択されてもよい。
封止部材40は、流体圧アクチュエータ10の軸方向XAにおいて、チューブ20の端部21を封止する。封止部材40は、封止部材本体41及びかしめ部材43によって構成される。
封止部材本体41は、管状のチューブ20に挿通される。具体的には、封止部材本体41は、チューブ20の内径よりも寸法が大きい頭部とチューブ20の内径に対して挿通可能な外径を備える胴体部とを有する。胴体部は、チューブ20に挿通される。
封止部材本体41としては、ステンレス鋼などの金属を好適に用い得るが、このような金属に限定されものではない。例えば、封止部材本体41として、硬質プラスチック材料などが用いられてもよい。
かしめ部材43は、封止部材本体41に挿通されたチューブ20、チューブ20の外周面を覆うスリーブ30、及びスリーブに編み込まれて一体化された拘束部材50を、封止部材本体41とともにかしめる。具体的には、かしめ部材43は、チューブ20、スリーブ30、及び拘束部材50の封止部材本体41に挿通された部分の外周に設けられ、これらの部材20,30,50を封止部材本体41にかしめる。
かしめ部材43としては、アルミニウム合金、真鍮、及び鉄などの金属を用いることができる。かしめ用の治具によってかしめ部材43がかしめられると、かしめ部材43には、圧痕が形成され得る。
なお、封止部材40は、封止部材本体41にスリーブ30および拘束部材50を係止する係止リングを備えてもよい(不図示)。具体的に、スリーブ30および拘束部材50は、係止リングを介して径方向外側に折り返されてもよい。
係止リングの形状は、封止部材本体41と係合可能な形状であってよい。また、係止リングの材料としては、封止部材本体41と同様の金属、硬質プラスチック材料などの材料や、自然繊維( 自然繊維の糸)、ゴム(例えばOリング)などの材料を用いることができる。
(3)封止機構の構成
図3は、流体圧アクチュエータの軸方向XAに沿った断面図である。具体的に、図3(a)は、流体圧アクチュエータが流体圧によって湾曲する前の状態を示す断面図である。図3(b)は、流体圧アクチュエータに流体圧をかけて湾曲させた後の状態を示す断面図である。
図3は、流体圧アクチュエータの軸方向XAに沿った断面図である。具体的に、図3(a)は、流体圧アクチュエータが流体圧によって湾曲する前の状態を示す断面図である。図3(b)は、流体圧アクチュエータに流体圧をかけて湾曲させた後の状態を示す断面図である。
図3(a)に示すように、チューブ20は、封止部材本体41の胴体部に挿通される。また、チューブ20、チューブ20の外周面を覆うスリーブ30、およびスリーブ30に編み込まれた拘束部材50は、かしめ部材43によって、封止部材本体41にかしめられている。
また、拘束部材50は、チューブ20の周方向における一部のみに設けられる(例えば図1参照)。
拘束部材50は、チューブ20及びスリーブ30の軸方向XAにおける一端側から他端側に亘って設けられる。具体的には、図3(a)に示すように、拘束部材50は、チューブ20の軸方向XAの一端側の封止部材40から他端側の封止部材40に亘って設けられてもよい。
但し、拘束部材50は、必ずしも完全に一端側の封止部材40から他端側の封止部材40に亘って設けられていなくてもよい。封止部材40の何れか一方(特に、湾曲時に自由端となる可能性が高い封止部材40側)には、拘束部材50が延在していなくてもよい。このような場合、例えば、拘束部材50の封止部材40まで延在しない側の端部は、例えば他端側のチューブ20やスリーブ30の一部などに固定されてもよい。
かしめ部材43は、封止部材本体41の胴体部の外径よりも大きく、胴体部に挿通された上で治具によってかしめられる。かしめ部材43は、チューブ20及びスリーブ30を封止部材本体41とともにかしめる。
(4)流体圧アクチュエータ10の湾曲挙動
図3(a)、3(b)は、流体圧アクチュエータ10の挙動の説明図である。図3(a)、3(b)に示されている流体圧アクチュエータ10は、図中左側に配置された一端側の封止部材40側が固定された固定端である。そして、流体圧アクチュエータ10の図中右側に配置された他端側の封止部材40が自由に移動できる状態にある自由端である。
図3(a)、3(b)は、流体圧アクチュエータ10の挙動の説明図である。図3(a)、3(b)に示されている流体圧アクチュエータ10は、図中左側に配置された一端側の封止部材40側が固定された固定端である。そして、流体圧アクチュエータ10の図中右側に配置された他端側の封止部材40が自由に移動できる状態にある自由端である。
上述したように、流体圧アクチュエータ10の内部に流体を流入させてチューブ20内の流体圧を上昇させると、スリーブ30によって軸方向XAに垂直な方向への膨張が拘束(規制)されて、流体圧アクチュエータ10は軸方向XAに伸長しようとする。
このとき、スリーブ30で外周面が覆われたチューブ20の拘束部材50が配置されている周方向の一部(図3(a),3(b)中の上側)では、拘束部材50が伸長しないため、チューブ20の伸長が阻害される。これに対して、チューブ20の周方向の一部に対向する部位(図3(a),3(b)中の下側)では、チューブ20が伸長する。このことにより、膨張収縮可能なチューブ20では、拘束部材50が配置された側(図3(a),3(b)の上側)における長さが、これに対向する位置(図3(a),3(b)の下側)の長さよりも相対的に短くなる。その結果、図3(b)に示されるように、自由端側(図3(b)の右側)が、拘束部材50が配置された側(図3(b)の上側)に湾曲する。
(5)作用・効果
流体圧アクチュエータ10は、以下のような特徴を有している。
流体圧アクチュエータ10は、以下のような特徴を有している。
・湾曲角度が大きい(180度以上曲がることができる)
・力の制御が容易(圧力に発生力が比例する)
・構造がシンプル
・表面をコートすることによって、操作対象に直接触れることも可能
また、ロボットハンド等に本実施形態の流体圧アクチュエータ10を用いた場合、流体圧アクチュエータ10では、チューブ20の伸縮を拘束する拘束部材50が湾曲状態の内側に位置することになる。このため、湾曲過程で、湾曲内側のスリーブ30およびチューブ20が伸縮しない。このため、流体圧アクチュエータ10を用いたロボットハンド等では、湾曲過程で操作対象と流体圧アクチュエータ10との接触点がチューブ20の伸縮によって滑ることがない。そして、軟らかい或いは軽くて変形しやすい操作対象を破壊、変形させることなく優しく掴み得る。
・力の制御が容易(圧力に発生力が比例する)
・構造がシンプル
・表面をコートすることによって、操作対象に直接触れることも可能
また、ロボットハンド等に本実施形態の流体圧アクチュエータ10を用いた場合、流体圧アクチュエータ10では、チューブ20の伸縮を拘束する拘束部材50が湾曲状態の内側に位置することになる。このため、湾曲過程で、湾曲内側のスリーブ30およびチューブ20が伸縮しない。このため、流体圧アクチュエータ10を用いたロボットハンド等では、湾曲過程で操作対象と流体圧アクチュエータ10との接触点がチューブ20の伸縮によって滑ることがない。そして、軟らかい或いは軽くて変形しやすい操作対象を破壊、変形させることなく優しく掴み得る。
また、本実施形態の流体圧アクチュエータ10のように拘束部材50が拘束用繊維コード51で構成された場合、チューブ20,スリーブ30、拘束部材50という流体圧アクチュエータ10が変形する部位が塑性変形し難い部材で構成される。このため、流体圧アクチュエータ10は、動作中などに他の剛体に接触した場合でも塑性変形しない柔軟性を有する。さらに、チューブ20,スリーブ30、拘束部材50という流体圧アクチュエータ10が変形する部位に剛性が高い部材が用いられていないため、軟らかい或いは軽くて変形しやすい操作対象を破壊、変形させることなく優しく掴む機能がさらに向上する。
また、本実施形態の流体圧アクチュエータ10のように、軸方向に配向する拘束部材50がスリーブ30に編み込まれて一体化されている場合、スリーブ30と拘束部材50とが一体的な挙動を示すようになる。この拘束部材50がスリーブ30に一体化された構成では、流体圧アクチュエータ10の湾曲状態の制御が容易になる。
(6)その他の実施形態
以上、実施形態に沿って本発明の内容を説明したが、本発明はこれらの記載に限定されるものではなく、種々の変形及び改良が可能であることは、当業者には自明である。
以上、実施形態に沿って本発明の内容を説明したが、本発明はこれらの記載に限定されるものではなく、種々の変形及び改良が可能であることは、当業者には自明である。
本実施形態では、拘束部材50がスリーブ30に編み込まれて一体化されていた。しかし、拘束部材の構成は、この構成に限定されるものでない。具体的に、拘束部材とスリーブとは別体であってもよい。ただし、拘束部材150とスリーブ130とを別体にする場合、図4に示されるように、拘束部材150はスリーブ130とチューブ120との間に配置される。
図4は、拘束部材150とスリーブ130とが別体で構成される変更例に係る流体圧アクチュエータの封止部材140近傍のかしめ前の状態を拡大した分解断面図である。図4に示すように、変更例では、流体通路145が形成された封止部材本体141及びかしめ部材143を備える封止部材140の胴体部にチューブ120が挿通される。そして、拘束部材150がスリーブ130とチューブ120との間に配置された状態で、かしめ部材143がチューブ120、スリーブ130、拘束部材150を封止部材本体141とともにかしめる。
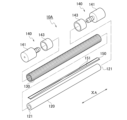
拘束部材とスリーブとを別体とする構成として、例えば拘束用繊維コード151と熱可塑性樹脂テープ等とを一体化した複合テープ材を、拘束部材150としてもよい。
この場合、複合テープ材である拘束部材150は、チューブ120の軸方向XAにおける一端側から他端側に亘って設けられている。このとき、複合テープ材の拘束用繊維コード151も、チューブ120の軸方向XAにおける一端側から他端側に亘って設けられている。拘束用繊維コード151は、熱可塑性樹脂テープ間に挟み込まれて一体化されていてよく、拘束用繊維コード151の一部が熱可塑性樹脂テープに接触または埋没していてもよい。
ここで、拘束用繊維コード151は、拘束用繊維コード51と同様に、繊維コード31に使用し得る繊維コードの中から所望の引張り強度などを考慮して、拘束用繊維コード151の材料が選択されればよい。
また、熱可塑性樹脂テープを構成する材料については特に限定されないが、例えば、ポリプロピレン(PP)、高密度ポリエチレン(HDPE)、中密度ポリエチレン(MDPE)、低密度ポリエチレン(LDPE)、ポリスチレン(PS)、ポリエチレンテレフタレート(PETP)、ポリブチレンテレフタレート(PBTP)、ポリフッ化ビニリデン(PVDF)、ポリアミド6(PA6)、又はポリアミド66(PA66)等が挙げられる。
また、拘束用繊維コード151と熱可塑性樹脂テープ等とを一体化した複合テープ材を拘束部材150とする場合、図5に示されるように、複数の拘束用繊維コード151が、チューブ120の軸方向XAにおける一端側から他端側に亘って設けられ、かつ互いに交差するように配置されていてもよい。
また、拘束部材に、互いに交差する複数の拘束用繊維コードを含む構成として、複数の拘束用繊維コード51を互いに交差するようにスリーブ30に編み込んでもよい。
互いに交差する複数の拘束用繊維コード51,151を拘束部材50,150に含む場合、拘束部材50,150が配置されるチューブ20、120の周方向の一部とは、周方向における周長の1/3以下の範囲であってよい。
拘束部材が、互いに交差する複数の拘束用繊維コード51を含む場合、一部の拘束用繊維コード51の張力のみが高まるように曲がる流体圧アクチュエータ10の変形が抑制され、流体圧アクチュエータ10を拘束部材50が延在する所定の方向に沿って湾曲させることができる。
また、上記のような拘束部材150をスリーブ130と別体とする構成で、より高い剛性が求められる用途で流体圧アクチュエータ10が使用される場合、スリーブ130とは別体である拘束部材150として、平板状或いはチューブ120の断面形状に倣うように湾曲した板バネ(leaf spring)を用いてもよい。拘束部材150として板バネを用いる場合でも、拘束部材150はチューブ120の周方向における一部に設けられる。そして、拘束部材150として板バネを用いる場合、拘束部材150をスリーブ130とチューブ120との間に配置することで、剛性を高めた湾曲する流体圧アクチュエータを得ることができる。
板バネの寸法は、流体圧アクチュエータのサイズ、及び必要とされる発生力などに応じて選択されればよく、特に限定されない。また、板バネの材料についても特に限定されないが、典型的には、ステンレス鋼などの金属など、曲げ易く、圧縮に強い材料であればよい。例えば、拘束部材150は、炭素繊維強化プラスチック(CFRP)の薄板などによって形成されてもよい。CFRPは、金属に比べて塑性変形をし難いため、拘束部材150として使用した場合でも、流体圧アクチュエータが湾曲後、元の真っ直ぐな状態に戻りやすい。
拘束部材150としての板バネの幅は、特に限定されないが、チューブ120の外径と基準とすれば、概ね当該外径の半分程度としてよい。一例としては、チューブ120の外径11mm、伸長前のチューブ120の長さ185mm、拘束部材150(板バネ)の幅6mm、厚さ0.5mm程度とすることができる。
また、上述した変更例では、拘束部材50、150が、チューブ20,120の周方向における一部(周長の1/3以下)に設けられていた。しかし、拘束部材は、流体圧アクチュエータ10の湾曲性が確保されていれば、チューブ20、120の周方向における半分(半周分)程度の範囲に設けられていても構わない。
さらに、上述した実施形態および変更例では、拘束部材50,150が、チューブ20,120及びスリーブ30,130の軸方向XAにおける一端側から他端側に亘って設けられていた。しかし、軸方向XAにおける略全体の領域に亘って設けられていれば、拘束部材50,150は、必ずしも、軸方向XAにおける一端から他端に亘って設けられていなくても構わない。
上記のように、本発明の実施形態を記載したが、この開示の一部をなす論述及び図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施の形態、実施例及び運用技術が明らかとなろう。
特願2021-205532号(出願日:2021年12月17日)の全内容は、ここに援用される。
Claims (5)
- 流体の圧力によって膨張および収縮するチューブと、
所定方向に配向された繊維コードを編み込んだ伸縮性を有する構造体であり前記チューブの外周面を覆うスリーブと、
前記チューブの軸方向における端部を封止する封止部材と、を備え、
前記スリーブの前記繊維コードが配向する前記所定方向が、前記チューブが膨張すると伸長する配向にされており、
前記チューブの周方向の一部に前記軸方向における一端側から他端側に亘って設けられ、前記チューブの前記周方向の一部における前記軸方向に沿った伸長を拘束する拘束部材をさらに備える流体圧アクチュエータ。 - 記拘束部材は、前記スリーブに編み込まれて一体化された請求項1に記載の流体圧アクチュエータ。
- 記拘束部材は、前記スリーブと前記チューブとの間に配置された請求項1に記載の流体圧アクチュエータ。
- 前記拘束部材が拘束用繊維コードを含む、請求項2または3に記載の流体圧アクチュエータ。
- 前記拘束部材が互いに交差する複数の前記拘束用繊維コードを含む請求項4に記載の流体圧アクチュエータ。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021205532A JP2023090537A (ja) | 2021-12-17 | 2021-12-17 | 流体圧アクチュエータ |
| JP2021-205532 | 2021-12-17 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023112447A1 true WO2023112447A1 (ja) | 2023-06-22 |
Family
ID=86774390
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/037853 WO2023112447A1 (ja) | 2021-12-17 | 2022-10-11 | 流体圧アクチュエータ |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2023090537A (ja) |
| WO (1) | WO2023112447A1 (ja) |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03113104A (ja) * | 1989-09-25 | 1991-05-14 | Bridgestone Corp | 湾曲可能なアクチュエータ |
| JPH06147202A (ja) * | 1992-11-02 | 1994-05-27 | Ckd Corp | 形状可変アクチュエータ |
| US20050081711A1 (en) * | 2002-03-04 | 2005-04-21 | Laszlo Kerekes | Pneumatic actuator |
| JP2015180829A (ja) * | 2014-03-06 | 2015-10-15 | 株式会社リコー | 流体駆動型アクチュエータ、その製造方法、及びその駆動方法、駆動装置、並びに関節構造 |
| JP2017046754A (ja) * | 2015-08-31 | 2017-03-09 | ダイヤ工業株式会社 | アクチュエータ及び身体支援装置 |
| JP2018189169A (ja) * | 2017-05-08 | 2018-11-29 | 国立大学法人東京工業大学 | アクチュエータおよび移動体 |
| JP2019090531A (ja) * | 2017-11-16 | 2019-06-13 | ヴァラン | 可変ジオメトリおよび定容積の膨張可能なチューブ、ロボットアームおよびロボット |
| JP2019120373A (ja) * | 2018-01-10 | 2019-07-22 | 興国インテック株式会社 | アクチュエータ |
| JP2021088999A (ja) * | 2019-12-02 | 2021-06-10 | 株式会社ブリヂストン | 流体圧アクチュエータ |
-
2021
- 2021-12-17 JP JP2021205532A patent/JP2023090537A/ja active Pending
-
2022
- 2022-10-11 WO PCT/JP2022/037853 patent/WO2023112447A1/ja unknown
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03113104A (ja) * | 1989-09-25 | 1991-05-14 | Bridgestone Corp | 湾曲可能なアクチュエータ |
| JPH06147202A (ja) * | 1992-11-02 | 1994-05-27 | Ckd Corp | 形状可変アクチュエータ |
| US20050081711A1 (en) * | 2002-03-04 | 2005-04-21 | Laszlo Kerekes | Pneumatic actuator |
| JP2015180829A (ja) * | 2014-03-06 | 2015-10-15 | 株式会社リコー | 流体駆動型アクチュエータ、その製造方法、及びその駆動方法、駆動装置、並びに関節構造 |
| JP2017046754A (ja) * | 2015-08-31 | 2017-03-09 | ダイヤ工業株式会社 | アクチュエータ及び身体支援装置 |
| JP2018189169A (ja) * | 2017-05-08 | 2018-11-29 | 国立大学法人東京工業大学 | アクチュエータおよび移動体 |
| JP2019090531A (ja) * | 2017-11-16 | 2019-06-13 | ヴァラン | 可変ジオメトリおよび定容積の膨張可能なチューブ、ロボットアームおよびロボット |
| JP2019120373A (ja) * | 2018-01-10 | 2019-07-22 | 興国インテック株式会社 | アクチュエータ |
| JP2021088999A (ja) * | 2019-12-02 | 2021-06-10 | 株式会社ブリヂストン | 流体圧アクチュエータ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023090537A (ja) | 2023-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2021088999A (ja) | 流体圧アクチュエータ | |
| EP0161750B1 (en) | Actuator | |
| JPH03113104A (ja) | 湾曲可能なアクチュエータ | |
| JPWO2008140032A1 (ja) | 流体注入型アクチュエータ | |
| US20190203740A1 (en) | Hydraulic actuator | |
| JPH0324304A (ja) | 弾性伸長体を用いたアクチュエータ | |
| WO2017010304A1 (ja) | 流体圧アクチュエータ | |
| WO2023112447A1 (ja) | 流体圧アクチュエータ | |
| JP2010127429A (ja) | 流体アクチュエータ | |
| JP6585946B2 (ja) | 流体圧アクチュエータ | |
| JP7349338B2 (ja) | 流体圧アクチュエータ | |
| JP6585943B2 (ja) | 流体圧アクチュエータ | |
| WO2020129743A1 (ja) | 流体圧アクチュエータ | |
| WO2023119809A1 (ja) | 把持装置 | |
| WO2023171110A1 (ja) | 流体圧アクチュエータ | |
| JP2023090524A (ja) | 流体圧アクチュエータ | |
| WO2024053292A1 (ja) | ロボットハンド | |
| WO2023112458A1 (ja) | 把持装置 | |
| WO2023171112A1 (ja) | カバー付き流体圧アクチュエータ | |
| WO2023171111A1 (ja) | ロボットハンド | |
| JP2023090572A (ja) | 流体圧アクチュエータおよびロボットハンド | |
| JP2023090574A (ja) | 流体圧アクチュエータおよびロボット | |
| WO2023105925A1 (ja) | 流体圧アクチュエータ | |
| WO2023112446A1 (ja) | 流体圧アクチュエータ | |
| WO2023112459A1 (ja) | 流体圧アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22906982 Country of ref document: EP Kind code of ref document: A1 |