WO2023171110A1 - 流体圧アクチュエータ - Google Patents
流体圧アクチュエータ Download PDFInfo
- Publication number
- WO2023171110A1 WO2023171110A1 PCT/JP2023/000326 JP2023000326W WO2023171110A1 WO 2023171110 A1 WO2023171110 A1 WO 2023171110A1 JP 2023000326 W JP2023000326 W JP 2023000326W WO 2023171110 A1 WO2023171110 A1 WO 2023171110A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- fluid pressure
- pressure actuator
- actuator
- sealing member
- tube
- Prior art date
Links
- 238000007789 sealing Methods 0.000 claims abstract description 73
- 235000017166 Bambusa arundinacea Nutrition 0.000 claims abstract description 16
- 235000017491 Bambusa tulda Nutrition 0.000 claims abstract description 16
- 241001330002 Bambuseae Species 0.000 claims abstract description 16
- 235000015334 Phyllostachys viridis Nutrition 0.000 claims abstract description 16
- 239000011425 bamboo Substances 0.000 claims abstract description 16
- 239000012530 fluid Substances 0.000 claims description 90
- 239000000835 fiber Substances 0.000 claims description 9
- 229910052751 metal Inorganic materials 0.000 claims description 9
- 239000002184 metal Substances 0.000 claims description 9
- 230000000452 restraining effect Effects 0.000 description 20
- 238000005452 bending Methods 0.000 description 8
- 239000000463 material Substances 0.000 description 7
- 230000006835 compression Effects 0.000 description 6
- 238000007906 compression Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 4
- 229920001971 elastomer Polymers 0.000 description 4
- 230000001105 regulatory effect Effects 0.000 description 4
- 239000005060 rubber Substances 0.000 description 4
- 229920000459 Nitrile rubber Polymers 0.000 description 3
- 239000004918 carbon fiber reinforced polymer Substances 0.000 description 3
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 239000004033 plastic Substances 0.000 description 3
- 229920003023 plastic Polymers 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000008602 contraction Effects 0.000 description 2
- 210000003414 extremity Anatomy 0.000 description 2
- 238000007373 indentation Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 150000002739 metals Chemical class 0.000 description 2
- -1 polyethylene terephthalate Polymers 0.000 description 2
- 229920000139 polyethylene terephthalate Polymers 0.000 description 2
- 239000005020 polyethylene terephthalate Substances 0.000 description 2
- 239000010935 stainless steel Substances 0.000 description 2
- 229910001220 stainless steel Inorganic materials 0.000 description 2
- 229910000838 Al alloy Inorganic materials 0.000 description 1
- 229910001369 Brass Inorganic materials 0.000 description 1
- 241000287828 Gallus gallus Species 0.000 description 1
- 239000004760 aramid Substances 0.000 description 1
- 229920006231 aramid fiber Polymers 0.000 description 1
- 229920003235 aromatic polyamide Polymers 0.000 description 1
- 239000010951 brass Substances 0.000 description 1
- 229920005549 butyl rubber Polymers 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 229910003460 diamond Inorganic materials 0.000 description 1
- 239000010432 diamond Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 235000013601 eggs Nutrition 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 229920005558 epichlorohydrin rubber Polymers 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 210000003141 lower extremity Anatomy 0.000 description 1
- 239000002480 mineral oil Substances 0.000 description 1
- 235000010446 mineral oil Nutrition 0.000 description 1
- 210000003205 muscle Anatomy 0.000 description 1
- 239000003921 oil Substances 0.000 description 1
- 229920001084 poly(chloroprene) Polymers 0.000 description 1
- 210000001364 upper extremity Anatomy 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
- B25J15/12—Gripping heads and other end effectors having finger members with flexible finger members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B15/00—Fluid-actuated devices for displacing a member from one position to another; Gearing associated therewith
- F15B15/08—Characterised by the construction of the motor unit
- F15B15/10—Characterised by the construction of the motor unit the motor being of diaphragm type
Definitions
- the present invention relates to a fluid pressure actuator.
- a fluid pressure actuator also called a "McKibben-type fluid pressure actuator”
- a fluid pressure actuator is used not only as a lift part (robot arm) for lifting an object, but also as a grip part (finger robot hand) for realizing the behavior of a human finger.
- an object of the present invention is to provide a fluid pressure actuator having a structure in which a cover member attached to a sealing member is difficult to come off.
- the gist of the present invention is as follows. It is a stretchable structure consisting of a cylindrical tube that expands and contracts depending on the pressure of fluid, and fiber cords oriented in a predetermined direction.
- a fluid pressure actuator comprising a sealing member that seals an end,
- a fluid pressure actuator characterized in that a bamboo shoot portion is formed on a free end side of the sealing member to enable locking and holding of a cover member separate from the fluid pressure actuator.
- a fluid pressure actuator having a structure in which a cover member attached to a sealing member is difficult to come off.
- FIG. 2 is a partially exploded perspective view of the fluid pressure actuator.
- FIG. 2 is a partial cross-sectional view along the axial direction DAX of a fluid pressure actuator including a sealing mechanism.
- FIG. 3 is a cross-sectional view of the actuator main body along the radial direction DR. It is an explanatory view of behavior of a fluid pressure actuator.
- FIG. 2 is a diagram showing an example of the configuration of a robot hand using a fluid pressure actuator. It is a schematic perspective view of the sealing member of the fluid pressure actuator of this embodiment with the cover member attached.
- FIG. 1 They are a schematic perspective view (upper figure) of a sealing member of the fluid pressure actuator of the present embodiment and a schematic perspective view (lower figure) of a cover member attached to the sealing member. It is a figure for explaining the cross-sectional shape of a bamboo shoot part.
- FIG. 1 is a side view of a fluid pressure actuator 10 according to this embodiment.
- the fluid pressure actuator 10 includes an actuator main body 100, a sealing mechanism 200, and a sealing mechanism 300. Furthermore, connecting portions 20 are provided at both ends of the fluid pressure actuator 10, respectively.
- the actuator main body 100 is composed of a tube 110 and a sleeve 120. Fluid flows into the actuator main body 100 through the connection port 211a.
- the actuator main body 100 contracts in the axial direction DAX and expands in the radial direction DR due to the inflow of fluid into the tube 110. Further, the actuator main body 100 expands in the axial direction DAX and contracts in the radial direction DR due to fluid flowing out from the tube 110. Due to such a shape change of the actuator main body 100, the fluid pressure actuator 10 exhibits its function as an actuator.
- Such a fluid pressure actuator 10 is a so-called McKibben type, and can be used not only for artificial muscles but also for robot limbs (upper limbs, lower limbs, etc.) that require higher capacity (contractile force). It can be suitably used.
- the connecting portion 20 is connected to members constituting the limb.
- a McKibben-type fluid pressure actuator having such basic characteristics is used, and a restraining member 150 (FIG. 1 (not shown, see FIGS. 2, 3, etc.), it is possible to curve (curl) in the orthogonal direction perpendicular to the axial direction DAX, that is, in the radial direction DR.
- the fluid used to drive the fluid pressure actuator 10 may be either a gas such as air or a liquid such as water or mineral oil, but the fluid pressure actuator 10 is particularly suitable for hydraulic drive where high pressure is applied to the actuator body 100. It has high durability that can withstand even
- the sealing mechanism 200 and the sealing mechanism 300 seal both ends of the actuator main body 100 in the axial direction DAX.
- the sealing mechanism 200 includes a sealing member 210 and a caulking member 230.
- the sealing member 210 seals the end of the actuator main body 100 in the axial direction DAX.
- the caulking member 230 caulks the actuator main body portion 100 together with the sealing member 210.
- An indentation 231 is formed on the outer peripheral surface of the caulking member 230, which is a trace of the caulking member 230 being caulked with a jig.
- the difference between the sealing mechanism 200 and the sealing mechanism 300 is whether a connection port 211a is provided and whether a protrusion 400, which will be described later, is provided. Therefore, except for these points, the structure of the sealing mechanism 300 is similar to the structure representatively described for the sealing mechanism 200.
- the fluid that has flowed in through the connection port 211a passes through a passage hole (not shown) and flows into the inside of the actuator main body 100, specifically, into the inside of the tube 110.
- FIG. 2 is a partially exploded perspective view of the fluid pressure actuator 10. As shown in FIG. 2, the fluid pressure actuator 10 includes an actuator main body 100 and a sealing mechanism 200.
- the actuator main body 100 is composed of the tube 110 and the sleeve 120, as described above.
- the tube 110 is a cylindrical body that expands and contracts depending on the pressure of the fluid.
- the tube 110 is made of an elastic material such as butyl rubber because it repeatedly contracts and expands with fluid.
- NBR nonrile rubber
- it should be made of NBR (nitrile rubber), which has high oil resistance, or at least one selected from the group consisting of hydrogenated NBR, chloroprene rubber, and epichlorohydrin rubber. is preferred.
- the sleeve 120 has a cylindrical shape and covers the outer peripheral surface of the tube 110.
- the sleeve 120 is a stretchable structure in which fiber cords oriented in a predetermined direction are woven together, and the oriented cords intersect to form a repeated diamond shape. By having such a shape, the sleeve 120 deforms in a pantograph and follows the contraction and expansion of the tube 110 while regulating it.
- the cord constituting the sleeve 120 it is preferable to use a fiber cord of aromatic polyamide (aramid fiber) or polyethylene terephthalate (PET).
- the cord is not limited to these types of fiber cords, and for example, cords of high-strength fibers such as PBO fibers (polyparaphenylenebenzobisoxazole) may be used.
- a restraining member 150 is provided between the tube 110 and the sleeve 120.
- the restraint member 150 is not compressed in the axial direction DAX, but can be deformed only along the radial direction DR (which may also be referred to as the deflection direction). That is, the restraint member 150 resists compression along the axial direction DAX, and is deformable in the orthogonal direction (radial direction DR) perpendicular to the axial direction DAX.
- the restraining member 150 has a characteristic that it is difficult to deform along the axial direction DAX and is flexible along the radial direction DR.
- deformable may also mean “curvable” or “curlable”.
- the restraint member 150 also has a function of restraining (regulating) the expansion of the tube 110 (and sleeve 120) outward in the radial direction DR at a position on the outer circumference of the tube 110 where the restraint member 150 is provided. There is.
- the restraint member 150 is provided inside the sleeve 120, specifically, in the space inside the sleeve 120 in the radial direction, from one end side to the other end side in the axial direction DAX. Further, in this embodiment, the restraint member 150 is formed using a leaf spring.
- the dimensions of the leaf spring are not particularly limited, and may be selected depending on the size of the fluid pressure actuator 10 and the required force to be generated.
- the material of the leaf spring is not particularly limited, but typically any material that is easy to bend and strong against compression, such as metal such as stainless steel, may be used.
- the restraint member 150 may be formed of a thin plate of carbon fiber reinforced plastic (CFRP). Since CFRP is less susceptible to plastic deformation than metal, the fluid pressure actuator 10 easily returns to its original straight state after being bent.
- the sealing mechanism 200 seals the end of the actuator main body 100 in the axial direction DAX.
- the sealing mechanism 200 includes a sealing member 210, a locking ring 220, and a caulking member 230.
- the sealing member 210 is inserted into the tubular actuator main body 100. Specifically, the sealing member 210 has a head portion 211 and a body portion 212, and the body portion 212 is inserted into the tube 110.
- sealing member 210 a metal such as stainless steel can be suitably used, but the sealing member 210 is not limited to such a metal, and a hard plastic material or the like may also be used.
- the locking ring 220 locks the sleeve 120 to the sealing member 210. Specifically, the sleeve 120 is folded back outward in the radial direction DR via the locking ring 220 (not shown in FIG. 2, see FIG. 3).
- the locking ring 220 has a notch 221 that is partially cut out so that it can be engaged with the sealing member 210.
- the same materials as the sealing member 210 such as metals and hard plastic materials, natural fibers (natural fiber threads), rubber (for example, O-rings), and other materials can be used.
- the caulking member 230 caulks the actuator main body 100 together with the sealing member 210.
- the caulking member 230 is provided on the outer peripheral surface of the portion of the actuator body 100 into which the sealing member 210 is inserted, and caulks the actuator body 100 to the sealing member 210 .
- the caulking member 230 metals such as aluminum alloy, brass, and iron can be used.
- an indentation 231 as shown in FIG. 1 is formed on the caulking member 230.
- FIG. 3 is a partial cross-sectional view of the fluid pressure actuator 10 including the sealing mechanism 200 along the axial direction DAX.
- the tube 110 is inserted into the body portion 212. Further, the sleeve 120 is folded back to the outside in the radial direction DR via the locking ring 220.
- a restraint member 150 is provided inside the sleeve 120 in the radial direction DR. Specifically, restraining member 150 is provided between tube 110 and sleeve 120.
- the restraining member 150 is provided in a part of the actuator main body 100 in the circumferential direction. That is, the restraint member 150 is provided only in a portion of the tube 110 (and sleeve 120) in the circumferential direction.
- the restraint member 150 is provided from one end side to the other end side in the axial direction DAX of the actuator main body 100 (that is, the tube 110 and the sleeve 120). Specifically, the restraining member 150 may be provided from the sealing mechanism 200 to the sealing mechanism 300.
- the restraining member 150 does not necessarily have to be provided completely from the sealing mechanism 200 to the sealing mechanism 300, and the restraining member 150 does not necessarily have to be provided completely over the sealing mechanism 200 and the sealing mechanism 300 (especially when the free end is bent). The restraining member 150 does not need to extend to the sealing mechanism 300 side (where there is a high possibility of this).
- the caulking member 230 is larger than the outer diameter of the body portion 212 of the sealing member 210, and is inserted into the body portion 212 and caulked with a jig.
- the caulking member 230 caulks the actuator main body 100 together with the sealing member 210 .
- the caulking member 230 caulks the tube 110 inserted into the body portion 212 and the sleeve 120 located outside the tube 110 in the radial direction DR. That is, the caulking member 230 caulks the tube 110 and the sleeve 120 together with the sealing member 210.
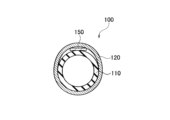
- FIG. 4 is a cross-sectional view of the actuator main body 100 along the radial direction DR.
- the restraining member 150 is provided between the tube 110 and the sleeve 120.
- the restraint member 150 may be in close contact with the tube 110 and the sleeve 120, or some gap may be formed between the restraint member 150 and the tube 110 and/or the sleeve 120, and on the sides of the restraint member 150. I don't mind.
- the restraining member 150 is provided in a part of the tube 110 in the circumferential direction.
- the width of the restraint member 150 is not particularly limited, but if it is based on the outer diameter of the tube 110, it may be approximately half the outer diameter.
- the outer diameter of the tube 110 may be 11 mm
- the length of the contracting actuator main body 100 portion may be 185 mm
- the width of the restraining member 150 (plate spring) may be 6 mm and the thickness may be approximately 0.5 mm.
- the restraint member 150 has a flat plate shape, but it may be slightly curved along the cross-sectional shapes of the tube 110 and the sleeve 120 as long as it does not affect the way it bends.
- FIG. 5 is an explanatory diagram of the behavior of the fluid pressure actuator 10.
- the sealing mechanism 200 side is fixed, and the sealing mechanism 300 side is freely movable. That is, the sealing mechanism 200 side is a fixed end, and the sealing mechanism 300 side is a free end.
- the restraining member 150 formed of a hard member such as a leaf spring plays a role like a backbone, and the position opposite to the position on the outer periphery of the tube 110 and sleeve 120 where the restraining member 150 is provided (FIG.
- the restraining member 150 By expanding outward in the radial direction DR, the dimension of the fluid pressure actuator 10 in the axial direction DAX is shortened, and the fluid pressure actuator 10 (specifically, the actuator main body 100) is expanded along the direction D1. Bends.
- the direction D1 may also be referred to as a flexible direction.
- the restraint member 150 is provided between the rubber tube 110 and the sleeve 120, and is a member that resists compression in the axial direction DAX and can be deformed along the orthogonal direction (radial direction DR). , are arranged in a part of the actuator main body 100 in the circumferential direction.
- the restraint member 150 has high compression rigidity, so the restraint member The part where 150 is placed cannot be contracted.
- other parts of the actuator main body 100 tend to contract, so a force in a bending direction along the orthogonal direction (radial direction DR) is generated, and the parts curve with the restraint member 150 as the back surface.
- FIG. 6 shows an example of the configuration of a robot hand using the fluid pressure actuator 10. Specifically, FIG. 6 is a schematic side view of a system 30 including a robot hand.
- the robot hand is configured using a plurality of fluid pressure actuators 10.
- the system 30 includes a plurality of hydraulic actuators 10 , a pedestal 35 , a strut 40 , an actuator connection 50 , and an actuator connection 60 .
- the fluid pressure actuator 10 is a bendable McKibben-type actuator that includes the restraining member 150 as described above.
- a support section 40 is provided upright on the upper surface of the pedestal section 35. The upper end portion of the support portion 40 is folded back downward, and the actuator connection portion 50 is connected to the tip portion of the support portion 40 .
- a fluid pressure actuator 15 is suspended from the actuator connection portion 50.
- the fluid pressure actuator 15 is not provided with a restraining member like the fluid pressure actuator 10, is a general McKibben type actuator, and contracts and expands along the axial direction (arrow direction in the figure). That is, the fluid pressure actuator 15 simply changes its length in the axial direction, and cannot curve like the fluid pressure actuator 10.
- An actuator connection portion 60 is connected to the lower end of the fluid pressure actuator 15. A plurality of fluid pressure actuators 10 are suspended from the actuator connection portion 60 .
- the fluid pressure actuator 15 is larger than the fluid pressure actuator 10 and can generate a larger force.
- the plurality of fluid pressure actuators 10 suspended from the actuator connection part 60 are curved, they can realize a behavior similar to a human finger.
- the plurality of hydraulic actuators 10 can grip soft and fragile objects, such as chicken eggs, without damaging them. Further, the fluid pressure actuator 10 and the fluid pressure actuator 15 can also grip and lift an object that weighs more than a certain level, for example, a shot put shot (7.26 kg or more).
- the fluid pressure actuator 10 has a large bending angle, generates a large force, is easy to control the force (generated force is proportional to pressure), has a simple structure, and can directly touch the object being handled by coating the surface. It has the following characteristics. Furthermore, the restraint member 150 provided in the fluid pressure actuator 10 resists compression of the actuator main body 100 (specifically, the tube 110) in the axial direction DAX, and resists compression in the radial direction DR perpendicular to the axial direction DAX. It can be transformed into.
- the restraint member 150 is provided inside the tube 110, the size of the fluid pressure actuator 10 does not increase. Furthermore, the restraint member 150 can efficiently generate force in the bending direction.
- the fluid pressure actuator 10 it is possible to exert a larger force in the bending direction while avoiding an increase in size.
- the restraint member 150 is provided in a part of the tube 110 in the circumferential direction. Therefore, on the circumference of the actuator main body 100, there are parts that contract and parts that cannot contract, and when pressure is applied to the fluid pressure actuator 10, it moves in one direction (the side opposite to the side where the restraining member 150 is provided). curve. Thereby, force in the bending direction can be efficiently generated, and a larger force in the bending direction can be exerted.
- the restraining member 150 is provided between the tube 110 and the sleeve 120. Therefore, expansion of the tube 110 along the axial direction DAX can be effectively restrained (regulated). Thereby, force in the bending direction can be efficiently generated, and a larger force in the bending direction can be exerted.
- FIG. 7 is a schematic perspective view of the sealing member of the fluid pressure actuator of this embodiment, to which the cover member is attached.
- FIG. 8 is a schematic perspective view (upper view) of a sealing member of the fluid pressure actuator of this embodiment and a schematic perspective view (lower view) of a cover member attached to the sealing member.
- the fluid pressure actuator 10 of this embodiment includes a cover member 500 that is separate from the fluid pressure actuator 10 on the free end side of the sealing member 310.
- a bamboo shoot portion 400 that can be locked and held is formed.
- the bamboo shoot part 400 has a structure in which a plurality of truncated square pyramids each having an outer shape in which a small diameter part and a large diameter part are connected by a tapered surface are continuous along the axial direction of the fluid pressure actuator 10.
- a plurality of truncated square pyramids each having an outer shape in which a small diameter part and a large diameter part are connected by a tapered surface are continuous along the axial direction of the fluid pressure actuator 10.
- three truncated square pyramids are consecutively arranged in the axial direction, but the number can also be two or four or more.
- an annular step is formed by the maximum diameter of the large diameter portion of one truncated cone and the minimum diameter of the small diameter portion of the truncated square pyramid adjacent to the one truncated square pyramid. ing.
- the cover member 500 has an insertion hole 501, and the insertion hole 501 is configured to fit into the bamboo shoot portion 400. The effects of this embodiment will be explained below.
- the bamboo shoot portion 400 that can lock and hold the cover member 500, which is separate from the fluid pressure actuator 10, is formed on the free end side of the sealing member 310.
- the cover member 500 for example, made of rubber
- the fluid pressure actuator of this embodiment has a structure in which the cover member attached to the sealing member is difficult to come off.
- the thickness of the cover member 500 can be increased, so that the cover member 500 can be made less likely to be torn.
- a plurality of truncated square pyramids (or truncated cones, etc.) having an outer shape in which a small diameter part and a large diameter part are connected by a tapered surface are connected to the fluid pressure actuator 10. Since the structure is continuous along the axial direction, even when a tensile force is applied in the axial direction, an annular step (in the illustrated example, such steps are formed at three locations in the axial direction) ) acts as a resistance, making it even more difficult for the cover member 500 to come off from the sealing member 310. For example, even when the robot hand grips a heavy object, it is possible to effectively prevent the cover 500 member from coming off from the sealing member 310. From this point of view, it is more preferable that three or more of the above-mentioned truncated square pyramids (or truncated cones, etc.) are continuous in the axial direction.
- the sealing member 310 is preferably made of metal. If the sealing member 310 is made of metal, it is likely to slip between it and the object, but such slipping can be prevented by the cover member 500 (for example, made of rubber). Moreover, such a cover member 500 is easy to replace, and for example, cover members 500 made of different materials can be used depending on the object.
- FIG. 9 is a diagram for explaining the cross-sectional shape of the bamboo shoot part.
- the bamboo shoot portion 400 preferably has a non-circular cross-section, and more preferably an elliptical cross-section or a rectangular cross-section. This is because it is possible to suppress rotation of the cover member 500 around the axial direction when the cover member 500 is attached.
- the long axis of the bamboo shoot part 400 in the cross section is arranged in a direction perpendicular to the direction in which the fluid pressure actuator curves. This is because a contact area is ensured when gripping the object, making it possible to grip the object more stably.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- General Engineering & Computer Science (AREA)
- Actuator (AREA)
Abstract
封止部材における自由端側に、前記流体圧アクチュエータとは別体のカバー部材を係止保持可能とするたけのこ部が形成されている。
Description
本発明は、流体圧アクチュエータに関するものである。
スリーブに覆われたチューブの膨張及び収縮によって所望の動作を実現可能な流体圧アクチュエータ(「マッキベン型の流体圧アクチュエータ」とも呼ばれる。)をロボットの分野に用いることが提案されている(例えば、特許文献1参照。)。特許文献1では、流体圧アクチュエータは、物を持ち上げるためのリフト部(ロボットアーム)としてだけでなく、人の指の挙動を実現させるための把持部(指ロボットハンド)としても用いられている。
しかしながら、上記のロボットハンドでは、対象物を把持する際に対象物と接する先端部と対象物との間に滑りが生じる場合があった。これに対し、先端部となる封止部材に滑り止め用のカバー部材を取り付けることも考えられるが、対象物の重さや繰り返しの使用により、カバー部材が封止部材から外れたり破れたりするおそれがある。
そこで、本発明は、封止部材に取り付けたカバー部材が外れにくい構造を有する流体圧アクチュエータを提供することを目的とする。
本発明の要旨構成は、以下の通りである。
流体の圧力によって膨張及び収縮する円筒状のチューブと、所定方向に配向された繊維コードを編み込んだ伸縮性を有する構造体であり、前記チューブの外周面を覆うスリーブと、前記チューブの軸方向における端部を封止する封止部材と、を備えた、流体圧アクチュエータであって、
前記封止部材における自由端側に、前記流体圧アクチュエータとは別体のカバー部材を係止保持可能とするたけのこ部が形成されていることを特徴とする、流体圧アクチュエータ。
流体の圧力によって膨張及び収縮する円筒状のチューブと、所定方向に配向された繊維コードを編み込んだ伸縮性を有する構造体であり、前記チューブの外周面を覆うスリーブと、前記チューブの軸方向における端部を封止する封止部材と、を備えた、流体圧アクチュエータであって、
前記封止部材における自由端側に、前記流体圧アクチュエータとは別体のカバー部材を係止保持可能とするたけのこ部が形成されていることを特徴とする、流体圧アクチュエータ。
本発明によれば、封止部材に取り付けたカバー部材が外れにくい構造を有する流体圧アクチュエータを提供することができる。
以下、本発明の実施形態について、図面を参照して詳細に例示説明する。
<流体圧アクチュエータ>
<<流体圧アクチュエータの全体概略構成>>
図1は、本実施形態に係る流体圧アクチュエータ10の側面図である。図1に示すように、流体圧アクチュエータ10は、アクチュエータ本体部100、封止機構200及び封止機構300を備える。また、流体圧アクチュエータ10の両端には、連結部20がそれぞれ設けられる。
<<流体圧アクチュエータの全体概略構成>>
図1は、本実施形態に係る流体圧アクチュエータ10の側面図である。図1に示すように、流体圧アクチュエータ10は、アクチュエータ本体部100、封止機構200及び封止機構300を備える。また、流体圧アクチュエータ10の両端には、連結部20がそれぞれ設けられる。
アクチュエータ本体部100は、チューブ110とスリーブ120とによって構成される。アクチュエータ本体部100には、接続口211aを介して流体が流入する。
アクチュエータ本体部100は、基本的な特性として、チューブ110内への流体の流入によって、アクチュエータ本体部100の軸方向DAXにおいて収縮し、径方向DRにおいて膨張する。また、アクチュエータ本体部100は、チューブ110から流体の流出によって、アクチュエータ本体部100の軸方向DAXにおいて膨張し、径方向DRにおいて収縮する。このようなアクチュエータ本体部100の形状変化によって、流体圧アクチュエータ10は、アクチュエータとしての機能を発揮する。
このような流体圧アクチュエータ10は、いわゆるマッキベン型であり、人工筋肉用として適用できることは勿論のこと、より高い能力(収縮力)が要求されるロボットの体肢(上肢や下肢など)用としても好適に用い得る。連結部20には、当該体肢を構成する部材などが連結される。
本実施形態では、このような基本的な特性を有するマッキベン型の流体圧アクチュエータを用いつつ、軸方向DAXの圧縮を拘束する(規制または制限すると呼んでもよい、以下同)拘束部材150(図1において不図示、図2,3など参照)を設けることによって、軸方向DAXに直交する直交方向、つまり、径方向DRに湾曲(カール)することができる。
流体圧アクチュエータ10の駆動に用いられる流体は、空気などの気体、または水、鉱物油などの液体のどちらでもよいが、特に、流体圧アクチュエータ10は、アクチュエータ本体部100に高い圧力が掛かる油圧駆動にも耐え得る高い耐久性を有し得る。
封止機構200及び封止機構300は、軸方向DAXにおけるアクチュエータ本体部100の両端部を封止する。具体的には、封止機構200は、封止部材210及びかしめ部材230を含む。封止部材210は、アクチュエータ本体部100の軸方向DAXの端部を封止する。また、かしめ部材230は、アクチュエータ本体部100を封止部材210とともにかしめる。かしめ部材230の外周面には、治具によってかしめ部材230がかしめられた痕である圧痕231が形成される。
封止機構200と封止機構300との相違点は、接続口211aが設けられているか否か及び後述の凸部400が設けられているか否かである。従って、これらの点を除いて、封止機構300の構造は、封止機構200について代表して説明される構造と同様である。
接続口211aは、流体圧アクチュエータ10の駆動圧力源、具体的には、気体や液体のコンプレッサと接続されたホース(管路)を取り付けられる。接続口211aを介して流入した流体は、通過孔(不図示)を通過してアクチュエータ本体部100の内部、具体的には、チューブ110の内部に流入する。
図2は、流体圧アクチュエータ10の一部分解斜視図である。図2示すように、流体圧アクチュエータ10は、アクチュエータ本体部100及び封止機構200を備える。
アクチュエータ本体部100は、上述したように、チューブ110とスリーブ120とによって構成される。
チューブ110は、流体の圧力によって膨張及び収縮する円筒状の筒状体である。チューブ110は、流体による収縮及び膨張を繰り返すため、ブチルゴムなど弾性材料によって構成される。また、流体圧アクチュエータ10を油圧駆動とする場合には、耐油性が高いNBR(ニトリルゴム)、または水素化NBR、クロロプレンゴム、及びエピクロロヒドリンゴムからなる群より選択される少なくとも一種とすることが好ましい。
スリーブ120は、円筒状であり、チューブ110の外周面を覆う。スリーブ120は、所定方向に配向された繊維コードを編み込んだ伸縮性を有する構造体であり、配向されたコードが交差することによって菱形の形状が繰り返されている。スリーブ120は、このような形状を有することによって、パンタグラフ変形し、チューブ110の収縮及び膨張を規制しつつ追従する。
スリーブ120を構成するコードとしては、芳香族ポリアミド(アラミド繊維)やポリエチレンテレフタラート(PET)の繊維コードを用いることが好ましい。但し、このような種類の繊維コードに限定されるものではなく、例えば、PBO繊維(ポリパラフェニレンベンゾビスオキサゾール)などの高強度繊維のコードでもよい。
また、本実施形態では、チューブ110とスリーブ120との間には、拘束部材150が設けられる。
拘束部材150は、軸方向DAXには圧縮せず、径方向DR(撓み方向と呼んでもよい)に沿ってのみ変形可能である。つまり、拘束部材150は、軸方向DAXに沿った圧縮に対して抵抗し、軸方向DAXに直交する直交方向(径方向DR)に変形可能である。
換言すると、拘束部材150は、軸方向DAXに沿って変形し難く、径方向DRに沿って撓める特性を有している。なお、変形可能とは、湾曲、或いはカール可能と言い換えてもよい。
また、拘束部材150は、拘束部材150が設けられているチューブ110の外周上の位置において、径方向DR外側へのチューブ110(及びスリーブ120)の膨張を拘束(規制)する機能も有している。
本実施形態では、拘束部材150は、スリーブ120の内側、具体的には、スリーブ120の径方向内側の空間において、軸方向DAXの一端側から他端側に亘って設けられる。また、本実施形態では、拘束部材150は、板バネ(leaf spring)を用いて形成される。
板バネの寸法は、流体圧アクチュエータ10のサイズ、及び必要とされる発生力などに応じて選択されればよく、特に限定されない。また、板バネの材料についても特に限定されないが、典型的には、ステンレス鋼などの金属など、曲げ易く、圧縮に強い材料であればよい。例えば、拘束部材150は、炭素繊維強化プラスチック(CFRP)の薄板などによって形成されてもよい。CFRPは、金属に比べて塑性変形をし難いため、流体圧アクチュエータ10が湾曲後、元の真っ直ぐな状態に戻りやすい。
封止機構200は、アクチュエータ本体部100の軸方向DAXにおける端部を封止する。封止機構200は、封止部材210、係止リング220及びかしめ部材230によって構成される。
封止部材210は、管状のアクチュエータ本体部100に挿通される。具体的には、封止部材210は、頭部211と胴体部212とを有し、胴体部212は、チューブ110に挿通される。
封止部材210としては、ステンレス鋼などの金属を好適に用い得るが、このような金属に限定されず、硬質プラスチック材料などを用いてもよい。
係止リング220は、封止部材210にスリーブ120を係止する。具体的には、スリーブ120は、係止リング220を介して径方向DR外側に折り返される(図2において不図示、図3参照)。
係止リング220には、封止部材210と係合できるように一部が切り欠かれた切欠き部221が形成されている。係止リング220としては、封止部材210と同様の金属、硬質プラスチック材料などの材料や、自然繊維(自然繊維の糸)、ゴム(例えばOリング)などの材料を用いることができる。
かしめ部材230は、アクチュエータ本体部100を封止部材210とともにかしめる。具体的には、かしめ部材230は、アクチュエータ本体部100の封止部材210が挿通された部分の外周面に設けられ、アクチュエータ本体部100を封止部材210にかしめる。
かしめ部材230としては、アルミニウム合金、真鍮、及び鉄などの金属を用いることができる。かしめ用の治具によってかしめ部材230がかしめられると、かしめ部材230には、図1に示したような圧痕231が形成される。
<<封止機構200の構成>>
図3は、封止機構200を含む流体圧アクチュエータ10の軸方向DAXに沿った一部断面図である。
図3は、封止機構200を含む流体圧アクチュエータ10の軸方向DAXに沿った一部断面図である。
図3に示すように、チューブ110は、胴体部212に挿通される。また、スリーブ120は、係止リング220を介して径方向DR外側に折り返されている。
スリーブ120の径方向DR内側には、拘束部材150が設けられる。具体的には、拘束部材150は、チューブ110とスリーブ120との間に設けられる。
また、拘束部材150は、アクチュエータ本体部100 の周方向における一部に設けられる。つまり、拘束部材150は、チューブ110(及びスリーブ120)の周方向における一部のみに設けられる。
拘束部材150は、アクチュエータ本体部100(つまり、チューブ110及びスリーブ120)の軸方向DAXにおける一端側から他端側に亘って設けられる。具体的には、拘束部材150は、封止機構200から封止機構300に亘って設けられてもよい。
但し、拘束部材150は、必ずしも完全に封止機構200から封止機構300に亘って設けられていなくてもよく、封止機構200及び封止機構300の何れか一方(特に、湾曲時に自由端となる可能性が高い封止機構300側)には、拘束部材150が延在していなくてもよい。
かしめ部材230は、封止部材210の胴体部212の外径よりも大きく、胴体部212に挿通された上で治具によってかしめられる。かしめ部材230は、アクチュエータ本体部100を封止部材210とともにかしめる。
具体的は、かしめ部材230は、胴体部212に挿通されたチューブ110、及びチューブ110の径方向DR外側に位置するスリーブ120をかしめる。つまり、かしめ部材230は、チューブ110及びスリーブ120を封止部材210とともにかしめる。
<<アクチュエータ本体部100の構成>>
図4は、アクチュエータ本体部100の径方向DRに沿った断面図である。図4に示すように、拘束部材150は、チューブ110とスリーブ120との間に設けられる。拘束部材150は、チューブ110及びスリーブ120と密着していてもよいし、拘束部材150と、チューブ110及び/またはスリーブ120との間、及び拘束部材150の側方には、多少隙間が形成されても構わない。
図4は、アクチュエータ本体部100の径方向DRに沿った断面図である。図4に示すように、拘束部材150は、チューブ110とスリーブ120との間に設けられる。拘束部材150は、チューブ110及びスリーブ120と密着していてもよいし、拘束部材150と、チューブ110及び/またはスリーブ120との間、及び拘束部材150の側方には、多少隙間が形成されても構わない。
拘束部材150は、チューブ110の周方向における一部に設けられる。拘束部材150の幅は、特に限定されないが、チューブ110の外径と基準とすれば、概ね当該外径の半分程度としてよい。一例としては、チューブ110の外径11mm、収縮するアクチュエータ本体部100部分の長さ185mm、拘束部材150(板バネ)の幅6mm、厚さ0.5mm程度とすることができる。
なお、本実施形態では、拘束部材150は、平板状であるが、撓み方に影響がない範囲において、チューブ110及びスリーブ120の断面形状に沿って多少湾曲させてもよい。
<< 流体圧アクチュエータ10の挙動>>
図5は、流体圧アクチュエータ10の挙動の説明図である。図5に示されている流体圧アクチュエータ10は、封止機構200側が固定されており、封止機構300側は自由に移動できる状態である。つまり、封止機構200側が固定端であり、封止機構300側が自由端である。
図5は、流体圧アクチュエータ10の挙動の説明図である。図5に示されている流体圧アクチュエータ10は、封止機構200側が固定されており、封止機構300側は自由に移動できる状態である。つまり、封止機構200側が固定端であり、封止機構300側が自由端である。
上述したように、流体圧アクチュエータ10の内部に流体が流入すると、軸方向DAXに収縮しようとするが、拘束部材150が設けられているため、軸方向DAXに沿った収縮が拘束(規制)される。
つまり、板バネなどの硬質な部材によって形成された拘束部材150が、背骨のような役割を果たし、拘束部材150が設けられているチューブ110及びスリーブ120の外周上の位置と反対側(図5における下側)において、径方向DR外側に膨張することによって、軸方向DAXにおける流体圧アクチュエータ10の寸法が短くなり、方向D1に沿って流体圧アクチュエータ10(具体的には、アクチュエータ本体部100)が撓む。なお、方向D1は、可撓方向と呼んでもよい。
拘束部材150は、ゴム製のチューブ110と、スリーブ120との間に設けられ、軸方向DAXにおける圧縮に対して抵抗し、に直交する直交方向(径方向DR)に沿って変形できる部材であり、アクチュエータ本体部100の周方向における一部に配置される。
つまり、アクチュエータ本体部100への流体の流入(加圧) によって、アクチュエータ本体部100(マッキベン)が軸方向DAXに沿って収縮しようとすると、拘束部材150の部分は圧縮剛性が高いため、拘束部材150が配置された部分は収縮することができない。一方、その他のアクチュエータ本体部100の部分は収縮しようとするため、直交方向(径方向DR)に沿った曲げ方向の力が発生し、拘束部材150を背面として湾曲する。
<<流体圧アクチュエータ10を用いたロボットハンドの構成例>>
図6は、流体圧アクチュエータ10を用いたロボットハンドの構成例を示す。具体的には、図6は、ロボットハンドを備えたシステム30の概略側面図である。
図6は、流体圧アクチュエータ10を用いたロボットハンドの構成例を示す。具体的には、図6は、ロボットハンドを備えたシステム30の概略側面図である。
図6に示すように、ロボットハンドは、複数の流体圧アクチュエータ10を用いて構成される。システム30は、複数の流体圧アクチュエータ10、台座部35、支柱部40、アクチュエータ接続部50及びアクチュエータ接続部60を備える。
流体圧アクチュエータ10は、上述したように拘束部材150を備え、湾曲可能なマッキベン型のアクチュエータである。
台座部35の上面には、支柱部40が立設されている。支柱部40の上端部は、下方に向けて折り返されており、支柱部40の先端部分には、アクチュエータ接続部50が連結されている。
アクチュエータ接続部50には、流体圧アクチュエータ15が吊り下げられている。流体圧アクチュエータ15は、流体圧アクチュエータ10のような拘束部材は備えられておらず、一般的なマッキベン型のアクチュエータであり、軸方向( 図中の矢印方向) に沿って収縮及び膨張する。つまり、流体圧アクチュエータ15は、単に軸方向の長さが変化するだけであり、流体圧アクチュエータ10のように湾曲することはできない。
流体圧アクチュエータ15の下端には、アクチュエータ接続部60が連結されている。アクチュエータ接続部60には、複数の流体圧アクチュエータ10が吊り下げられている。
流体圧アクチュエータ15は、流体圧アクチュエータ10と比較して大型であり、より大きな力を発生できる。一方、アクチュエータ接続部60に吊り下げられている複数の流体圧アクチュエータ10は、湾曲するため、ヒトの指に似た挙動を実現し得る。
複数の流体圧アクチュエータ10は、鶏卵のような柔らかくて壊れやすい物体を損傷させずに把持できる。また、流体圧アクチュエータ10及び流体圧アクチュエータ15は、一定以上の重量があるような物体、例えば、砲丸投げの砲丸(7.26kg以上)を把持して持ち上げることも可能である。
流体圧アクチュエータ10は、湾曲角度が大きい、発生力が大きい、力の制御が容易(圧力に発生力が比例)、構造がシンプル、表面をコートすることによって、取り扱う物体に直接触れることも可能、という特徴を有する。
また、流体圧アクチュエータ10に備えられる拘束部材150は、アクチュエータ本体部100( 具体的には、チューブ110)の軸方向DAXに沿った圧縮に対して抵抗し、軸方向DAXに直交する径方向DRに変形可能である。
また、流体圧アクチュエータ10に備えられる拘束部材150は、アクチュエータ本体部100( 具体的には、チューブ110)の軸方向DAXに沿った圧縮に対して抵抗し、軸方向DAXに直交する径方向DRに変形可能である。
拘束部材150は、チューブ110の内側に設けられるため、流体圧アクチュエータ10のサイズが大型化することもない。さらに、拘束部材150によって、効率的に湾曲方向への力を発生させることができる。
すなわち、流体圧アクチュエータ10によれば、サイズの大型化を回避しつつ、より大きな湾曲方向の力を発揮し得る。
本実施形態では、拘束部材150は、チューブ110の周方向における一部に設けられる。このため、アクチュエータ本体部100の周上において、収縮する部分と収縮できない部分とが発生し、流体圧アクチュエータ10に加圧すると、一方向(拘束部材150が設けられている側と反対側)に湾曲する。これにより、効率的に湾曲方向への力を発生させることができ、より大きな湾曲方向の力を発揮し得る。
本実施形態では、拘束部材150は、チューブ110とスリーブ120との間に設けられる。このため、チューブ110の軸方向DAXに沿った膨張を効果的に拘束(規制)できる。これにより、効率的に湾曲方向への力を発生させることができ、より大きな湾曲方向の力を発揮し得る。
図7は、カバー部材が取り付けられた、本実施形態の流体圧アクチュエータの封止部材の概略斜視図である。図8は、本実施形態の流体圧アクチュエータの封止部材の概略斜視図(上図)及び封止部材に取り付けるカバー部材の概略斜視図(下図)である。図1、図7、図8(上図)に示すように、本実施形態の流体圧アクチュエータ10は、封止部材310における自由端側に、流体圧アクチュエータ10とは別体のカバー部材500を係止保持可能とするたけのこ部400が形成されている。たけのこ部400は、本例では、小径部と大径部がテーパ面で接続された外形を有する複数の截頭四角錐が、流体圧アクチュエータ10の軸方向に沿って連続した構造を有している。図示例では、截頭四角錐は、軸方向に3個連続して配置されているが、2個又は4個以上とすることもできる。これにより、封止部材300は一の截頭円錐の大径部の最大径と、該一の截頭四角錐に隣接する截頭四角錐の小径部の最小径とにより環状の段差が形成されている。なお、截頭四角錐に代えて、截頭円錐等他の様々な形状とすることもできる。図示例では、カバー部材500は、差し込み孔501を有し、この差し込み孔501がたけのこ部400と嵌合するように構成されている。
以下、本実施形態の作用効果について説明する。
以下、本実施形態の作用効果について説明する。
本実施形態の流体圧アクチュエータによれば、封止部材310における自由端側に、流体圧アクチュエータ10とは別体のカバー部材500を係止保持可能とするたけのこ部400が形成されているため、(例えばゴム製の)カバー部材500を装着した際に、カバー500部材が封止部材310から外れるのを抑制することができる。このように、本実施形態の流体圧アクチュエータによれば、封止部材に取り付けたカバー部材が外れにくい構造となる。また、カバー部材500が封止部材310から外れにくくなる分、カバー部材500の厚さを厚くすることもできるため、カバー部材500を破れにくくすることもできる。
特に、図7に示したように、たけのこ部においてが、小径部と大径部がテーパ面で接続された外形を有する複数の截頭四角錐(又は截頭円錐等)が、流体圧アクチュエータ10の軸方向に沿って連続した構造であることによれば、軸方向に対して引張力が作用した際にも、環状の段差(図示例ではそのような段差が軸方向に3か所形成されている)が抵抗となるため、より一層カバー部材500が封止部材310から外れにくくなる。例えば、ロボットハンドが重量のある対象物を把持した際にも、カバー500部材が封止部材310から外れるのを効果的に抑制することができる。このような観点からは、上記の截頭四角錐(又は截頭円錐等)は、3個以上軸方向に連続していることがさらに好ましい。
また、上述した通り、封止部材310は、金属製とすることが好ましい。封止部材310が金属製である場合には、対象物との間で滑りが生じやすいが、カバー部材500(例えばゴム製)により、そのような滑りを防止することもできる。また、このようなカバー部材500は交換も容易であり、例えば対象物によって材質の異なるカバー部材500を用いる等することもできる。
図9は、たけのこ部の断面形状について説明するための図である。図9に示すように、たけのこ部400は、断面非円形状であることが好ましく、断面楕円形状又は断面長方形状であることがより好ましい。カバー部材500を取り付けた際に、カバー部材500が軸方向周りに回転するのを抑制することができるからである。
また、ロボットハンドにおいて、たけのこ部400は、断面における長軸が流体圧アクチュエータの湾曲する方向と直交する方向に配置されていることが好ましい。対象物を把持する際の接触面積を確保して、より安定的な把持が可能となるからである。
10、15:流体圧アクチュエータ、 20:連結部、 30:把持システム、
35:台座部、 40:支柱部、 50、60:アクチュエータ接続部、
100、100A、100B:アクチュエータ本体部、
110:チューブ、 120:スリーブ、 150、150A、150B:拘束部材、
151:ピアノ線、 160:離間部材、 200、200A:封止機構、
210:封止部材、 211:頭部、 211a:接続口、 212:胴体部、
220:係止リング、 221:切欠き部、 230:かしめ部材、
231:圧痕、 300:封止機構、 310:封止部材、
400:たけのこ部、 500:カバー部材
35:台座部、 40:支柱部、 50、60:アクチュエータ接続部、
100、100A、100B:アクチュエータ本体部、
110:チューブ、 120:スリーブ、 150、150A、150B:拘束部材、
151:ピアノ線、 160:離間部材、 200、200A:封止機構、
210:封止部材、 211:頭部、 211a:接続口、 212:胴体部、
220:係止リング、 221:切欠き部、 230:かしめ部材、
231:圧痕、 300:封止機構、 310:封止部材、
400:たけのこ部、 500:カバー部材
Claims (5)
- 流体の圧力によって膨張及び収縮する円筒状のチューブと、所定方向に配向された繊維コードを編み込んだ伸縮性を有する構造体であり、前記チューブの外周面を覆うスリーブと、前記チューブの軸方向における端部を封止する封止部材と、を備えた、流体圧アクチュエータであって、
前記封止部材における自由端側に、前記流体圧アクチュエータとは別体のカバー部材を係止保持可能とするたけのこ部が形成されていることを特徴とする、流体圧アクチュエータ。 - 前記たけのこ部は、断面非円形状である、請求項1に記載の流体圧アクチュエータ。
- 前記たけのこ部は、断面において、楕円形状又は長方形状である、請求項2に記載の流体圧アクチュエータ。
- 前記たけのこ部は、前記断面における長軸が前記流体圧アクチュエータの湾曲する方向と直交する方向に配置されている、請求項2又は3に記載の流体圧アクチュエータ。
- 前記封止部材は、金属製である、請求項1~4のいずれか一項に記載の流体圧アクチュエータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202380024048.3A CN118786285A (zh) | 2022-03-08 | 2023-01-10 | 流体压力致动器 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022-035715 | 2022-03-08 | ||
| JP2022035715A JP2023131049A (ja) | 2022-03-08 | 2022-03-08 | 流体圧アクチュエータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023171110A1 true WO2023171110A1 (ja) | 2023-09-14 |
Family
ID=87936664
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/000326 WO2023171110A1 (ja) | 2022-03-08 | 2023-01-10 | 流体圧アクチュエータ |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP2023131049A (ja) |
| CN (1) | CN118786285A (ja) |
| WO (1) | WO2023171110A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57168891A (en) * | 1981-04-06 | 1982-10-18 | Mitsubishi Electric Corp | Element for actuator |
| JPH03113104A (ja) * | 1989-09-25 | 1991-05-14 | Bridgestone Corp | 湾曲可能なアクチュエータ |
| JP2000274410A (ja) * | 1999-03-24 | 2000-10-03 | Sanjo Kinzoku Kk | 棒・線状体固定具、棒・線状体挟持固定具 |
-
2022
- 2022-03-08 JP JP2022035715A patent/JP2023131049A/ja active Pending
-
2023
- 2023-01-10 WO PCT/JP2023/000326 patent/WO2023171110A1/ja active Application Filing
- 2023-01-10 CN CN202380024048.3A patent/CN118786285A/zh active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57168891A (en) * | 1981-04-06 | 1982-10-18 | Mitsubishi Electric Corp | Element for actuator |
| JPH03113104A (ja) * | 1989-09-25 | 1991-05-14 | Bridgestone Corp | 湾曲可能なアクチュエータ |
| JP2000274410A (ja) * | 1999-03-24 | 2000-10-03 | Sanjo Kinzoku Kk | 棒・線状体固定具、棒・線状体挟持固定具 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN118786285A (zh) | 2024-10-15 |
| JP2023131049A (ja) | 2023-09-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2021088999A (ja) | 流体圧アクチュエータ | |
| Daerden et al. | Pneumatic artificial muscles: actuators for robotics and automation | |
| JP2010127429A (ja) | 流体アクチュエータ | |
| WO2007058085A1 (ja) | 流体圧式アクチュエータ | |
| WO2023171110A1 (ja) | 流体圧アクチュエータ | |
| WO2023171113A1 (ja) | ロボットハンド | |
| WO2023171111A1 (ja) | ロボットハンド | |
| JP7349338B2 (ja) | 流体圧アクチュエータ | |
| WO2023171112A1 (ja) | カバー付き流体圧アクチュエータ | |
| WO2023112458A1 (ja) | 把持装置 | |
| WO2023112457A1 (ja) | 把持装置 | |
| WO2023119808A1 (ja) | 把持装置 | |
| WO2023119809A1 (ja) | 把持装置 | |
| WO2023112446A1 (ja) | 流体圧アクチュエータ | |
| JP2023091136A (ja) | 把持装置 | |
| CN118871681A (zh) | 具有盖的流体压力致动器 | |
| WO2023112447A1 (ja) | 流体圧アクチュエータ | |
| WO2024053292A1 (ja) | ロボットハンド | |
| JP2023090524A (ja) | 流体圧アクチュエータ | |
| WO2023112422A1 (ja) | 流体圧アクチュエータ | |
| EP4454837A1 (en) | Gripping device | |
| WO2023112448A1 (ja) | アクチュエータカバー付き保持部材及びアクチュエータカバー | |
| WO2024053293A1 (ja) | ロボットハンド | |
| WO2024219111A1 (ja) | 流体圧アクチュエータおよびアタッチメント | |
| JP2024121657A (ja) | ロボットハンド |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23766291 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023766291 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2023766291 Country of ref document: EP Effective date: 20241008 |