WO2023090414A1 - 測距装置、モデル生成装置、情報生成装置、情報生成方法、およびプログラム - Google Patents
測距装置、モデル生成装置、情報生成装置、情報生成方法、およびプログラム Download PDFInfo
- Publication number
- WO2023090414A1 WO2023090414A1 PCT/JP2022/042825 JP2022042825W WO2023090414A1 WO 2023090414 A1 WO2023090414 A1 WO 2023090414A1 JP 2022042825 W JP2022042825 W JP 2022042825W WO 2023090414 A1 WO2023090414 A1 WO 2023090414A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- information
- distance measuring
- light
- measuring device
- reflected light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
- G01S17/10—Systems determining position data of a target for measuring distance only using transmission of interrupted, pulse-modulated waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/4802—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00 using analysis of echo signal for target characterisation; Target signature; Target cross-section
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4816—Constructional features, e.g. arrangements of optical elements of receivers alone
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4865—Time delay measurement, e.g. time-of-flight measurement, time of arrival measurement or determining the exact position of a peak
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
- G01S2007/4975—Means for monitoring or calibrating of sensor obstruction by, e.g. dirt- or ice-coating, e.g. by reflection measurement on front-screen
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/487—Extracting wanted echo signals, e.g. pulse detection
- G01S7/4876—Extracting wanted echo signals, e.g. pulse detection by removing unwanted signals
Definitions
- the present invention relates to a distance measuring device, a model generation device, an information generation device, an information generation method, and a program.
- a rangefinder is one that measures the time it takes for emitted light to be reflected by an object and return to measure the distance to surrounding objects.
- Patent Literature 1 describes monitoring the light reception power and operating the window cleaning device when it is necessary to remove dirt from the window.
- the effect of adhering matter on distance measurement varies depending on the configuration of the distance measuring device. Appropriate action can be taken by identifying how ranging is affected.
- One example of the problem to be solved by the present invention is to identify the effect of deposits on the output window of the rangefinder on the rangefinder performance.
- a distance measuring device that emits light output from a light source through a transparent member and detects reflected light from an object, a light receiving unit that receives at least internally reflected light including reflected light reflected by the transmissive member; and an information generation unit that generates information on the distance measuring performance of the distance measuring device using the result of light reception of the internally reflected light by the light receiving unit.
- a distance measuring device that emits light output from a light source through a transparent member and detects reflected light from an object, wherein a light receiving unit receives internally reflected light including reflected light reflected by the transparent member, a training data acquisition unit that acquires training data in which the received light result is associated with information about the distance measurement capability of the range finder; a model generation unit that generates a model that receives the result of receiving the internally reflected light and outputs information about the distance measurement by performing machine learning using the training data; It is a model generator.
- An information generating device for generating information on the distance measuring performance of a distance measuring device that emits light output from a light source through a transparent member and detects reflected light from an object, an information generating unit configured to generate information about distance measuring performance of the distance measuring device by using a result of light reception of the internally reflected light by a light receiving unit that receives at least the internally reflected light including the reflected light reflected by the transmission member; It is an information generating device.
- the invention according to claim 14 An information generating method executed by a computer for generating information on the distance measurement performance of a distance measuring device that emits light output from a light source through a transparent member and detects reflected light from an object, An information generating method for generating information about the distance measuring performance of the distance measuring device using the result of light reception of the internally reflected light by a light receiving unit that receives at least the internally reflected light including the reflected light reflected by the transmissive member. .
- the invention according to claim 15, A program that causes a computer to function as the information generation device according to claim 13.
- FIG. 1 is a diagram illustrating the configuration of a distance measuring device according to a first embodiment
- FIG. 1 is a diagram illustrating a distance measuring device according to a first embodiment
- FIG. 1 is a diagram illustrating in detail the configuration of a distance measuring device according to a first embodiment
- FIG. 3 is a diagram illustrating hardware configurations of a control unit and an information generation unit according to the first embodiment
- FIG. 10 is a diagram illustrating a received light signal waveform of internally reflected light when an adhering matter is generated on a transmissive member
- FIG. 10 is a diagram illustrating a received light signal waveform of internally reflected light when an adhering matter is generated on a transmissive member
- FIG. 10 is a diagram illustrating a received light signal waveform of internally reflected light when an adhering matter is generated on a transmissive member
- FIG. 10 is a diagram illustrating a received light signal waveform of internally reflected light when an adhering matter is generated on a transmissive member
- FIG. 4 is a diagram schematically showing the distribution of internal reflected light intensity within a frame; 4 is a table exemplifying a determination rule for generating distance measurement information from the result of receiving internal reflected light;
- FIG. 9 is a flow chart exemplifying the flow of determination by an information generation unit when the determination rule of FIG. 8 is used;
- FIG. (a) is a diagram schematically showing a transmissive member of a rangefinder without a telephoto lens;
- (b) and (c) are diagrams of a transmissive member of a rangefinder with a telephoto lens; It is a schematic diagram.
- FIG. 10 is a diagram showing the result of measurement with an adhering matter attached to the transmissive member of the distance measuring device to which the telephoto lens is not attached;
- FIG. 10 is a diagram showing the results of measurement in a state in which an adhering matter is attached to a transmissive member of a distance measuring device to which a telephoto lens is attached;
- FIG. 10 is a diagram illustrating an image displaying a range map;
- 4 is a flowchart illustrating the flow of an information generation method according to the first embodiment; It is a figure which illustrates the learned model which the information generation part which concerns on 2nd Embodiment uses.
- 2 is a block diagram illustrating the functional configuration of an apparatus that generates a model;
- FIG. 12 is a block diagram illustrating the functional configuration of a distance measuring device according to a fourth embodiment; FIG. It is a figure for demonstrating an alerting
- FIG. 12 is a block diagram illustrating the configuration of an information generation device according to a fifth embodiment; FIG. It is a figure which illustrates the hardware constitutions of the information generation apparatus which concerns on 5th Embodiment.
- FIG. 1 is a diagram illustrating the configuration of a distance measuring device 10 according to the first embodiment.
- FIG. 2 is a diagram illustrating the distance measuring device 10 according to this embodiment.
- dashed arrows schematically indicate paths of light.
- a distance measuring device 10 according to this embodiment is a device that emits light output from a light source 14 through a transmission member 20 and detects reflected light from an object 30 .
- the distance measuring device 10 has a light receiving section 180 and an information generating section 121 .
- the light receiving section 180 receives at least internally reflected light including reflected light reflected by the transmissive member 20 .
- the information generator 121 uses the result of the light reception of the internally reflected light by the light receiver 180 to generate information (hereinafter referred to as "ranging information”) regarding the ranging performance of the ranging device 10 .
- ranging information information regarding the ranging performance of the ranging device 10 .
- the light emitted from the light source 14 is emitted to the outside of the distance measuring device 10 mainly through the transmission member 20 as shown in FIG.
- at least part of the light output from the light source 14 is reflected inside the distance measuring device 10 as shown in FIG. 1 and becomes internally reflected light.
- the internally reflected light is received by the light receiving section 180 .
- This internally reflected light includes the light reflected by the transmissive member 20 .
- the reflected light due to the deposit is included in the internally reflected light.
- the transmission member 20 is a member that separates the inside and outside of the distance measuring device 10 and that transmits light.
- Transmissive member 20 is made of, for example, glass or resin. At least one surface of the transmissive member 20 is exposed to the space outside the range finder 10, and dirt, raindrops, and the like may adhere to it.
- the reflected light caused by the deposit includes, for example, light reflected at the interface between the transmissive member 20 and the deposit, light reflected inside the deposit, and light reflected at the interface between the deposit and air. include.
- the information generation unit 121 can generate distance measurement information using such a result of receiving the internally reflected light.
- the distance measurement information is, for example, information indicating the distance measurement performance, and is information related to the received light intensity of the reflected light from the object 30 and the distance measurement limit distance.
- the distance measurement information can be deterioration information indicating the degree of deterioration of the distance measurement performance with respect to the reference state.
- the distance measurement information may be information indicating the level of the distance measurement performance. It is assumed that the object 30 is not attached to the transmissive member 20 , that is, is not in contact with the transmissive member 20 .
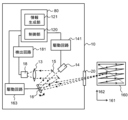
- FIG. 3 is a diagram illustrating in detail the configuration of the distance measuring device 10 according to this embodiment.
- dashed arrows schematically indicate paths of light.
- the configuration of the distance measuring device 10 will be described in detail with reference to this figure.
- Distance measuring device 10 measures the distance between distance measuring device 10 and an object (target object 30) within scanning range 160 based on, for example, the difference between the emission timing of pulsed light and the reception timing of reflected light (reflected pulsed light). It is a device for measuring distance.
- the pulsed light is light such as infrared light, for example.
- the pulsed light is, for example, a laser pulse.
- the pulsed light emitted from the light source 14 provided in the distance measuring device 10 and emitted to the outside of the distance measuring device 10 through the transmission member 20 is reflected by an object and at least part of it is directed toward the distance measuring device 10. return. Then, the reflected light passes through the transmission member 20 again and enters the distance measuring device 10 .
- the reflected light incident on the distance measuring device 10 is received by the light receiving section 180 and its intensity is detected.
- Light receiving section 180 includes light receiving element 18 and detection circuit 181 .
- the distance measuring device 10 measures the time from when the pulsed light is emitted from the light source 14 to when the reflected light is detected by the light receiving section 180 .
- the control unit 120 provided in the distance measuring device 10 calculates the distance between the distance measuring device 10 and the object using the measured time and the propagation speed of the pulsed light.
- the ranging device 10 is, for example, a lidar (LIDAR: Laser Imaging Detection and Ranging, Laser Illuminated Detection and Ranging or LiDAR: Light Detection and Ranging) device.
- the light source 14 emits pulsed light.
- Light source 14 is, for example, a laser diode.
- the light receiving element 18 receives the pulsed light incident on the distance measuring device 10 and the internal reflected light described above.
- Light receiving element 18 is, for example, a photodiode such as an avalanche photodiode (APD).
- the light-receiving element 18 includes a light-receiving element for receiving internally reflected light and using it for generating distance measurement information, and a light-receiving element for receiving reflected light from the object 30 and measuring the distance.
- An example that is also used is explained.
- the light-receiving element for receiving the internally reflected light and using it for determination of adhering matter and the light-receiving element for receiving the reflected light from the object 30 and measuring the distance may be provided separately.
- the distance measuring device 10 further includes a movable mirror 16.
- the movable mirror 16 is, for example, a uniaxially movable or biaxially movable MEMS mirror. By changing the orientation of the reflecting surface of the movable mirror 16, the emission direction of the pulsed light emitted from the distance measuring device 10 can be changed.
- the movable mirror 16 is a biaxially movable MEMS mirror, by biaxially driving the movable mirror 16, raster scanning can be performed within a predetermined range with pulsed light.
- the control unit 120 generates point cloud data including measurement results using a plurality of pulsed lights. For example, when raster scanning is performed within the scanning range 160 , linear scanning is performed by changing the light emission direction to the first direction 161 . By performing a plurality of linear scans while changing the light emitting direction in the second direction 162, point cloud data including a plurality of measurement results within the scanning range 160 can be generated.
- the first direction 161 and the second direction 162 are orthogonal.
- a unit of point cloud data generated by a single raster scan is called a frame. After the measurement of one frame is finished, the direction of light emission returns to the initial position, and the measurement of the next frame is performed. Thus, repeating frames are generated.
- distances measured by pulsed light are associated with information indicating the emission direction of the pulsed light.
- the point cloud data may include three-dimensional coordinates indicating reflection points of the pulsed light.
- the control unit 120 generates point cloud data using the calculated distance and information indicating the angle of the movable mirror 16 when emitting each pulsed light.
- the generated point cloud data may be output to the outside of the distance measuring device 10 or may be held in a storage device accessible from the control unit 120 .
- the distance measuring device 10 further includes a mirror 15 with a hole and a condenser lens 13 .
- the pulsed light emitted from the light source 14 passes through the hole of the mirror 15 with a hole, is reflected by the movable mirror 16 , and is emitted from the distance measuring device 10 .
- the reflected light incident on the distance measuring device 10 is reflected by the movable mirror 16 and the holed mirror 15 , and then enters the light receiving section 180 via the condenser lens 13 .
- the distance measuring device 10 may further include a collimating lens, a mirror, and the like.
- the control section 120 can control the light emitting section 140, the light receiving section 180, and the movable reflecting section 164 (see FIG. 4).
- Light emitting unit 140 includes light source 14 and drive circuit 141 .
- Movable reflector 164 includes movable mirror 16 and drive circuit 163 .
- the drive circuit 141 is a circuit for causing the light source 14 to emit light based on the control signal from the integrated circuit 80, and includes, for example, a switching circuit and a capacitive element.
- the detection circuit 181 includes an IV converter and an amplifier, and outputs a signal indicating the intensity of light detected by the light receiving element 18 .
- the control unit 120 acquires a light receiving signal from the light receiving unit 180 and calculates the distance from the distance measuring device 10 to the object within the scanning range 160 as described above.
- the information generator 121 also acquires the light reception signal from the light receiver 180 and uses it to generate positive distance measurement information.
- FIG. 4 is a diagram illustrating the hardware configuration of the control unit 120 and the information generation unit 121 according to this embodiment.
- the controller 120 and the information generator 121 are implemented using an integrated circuit 80 .
- the integrated circuit 80 is, for example, an SoC (System On Chip).
- the integrated circuit 80 has a bus 802 , a processor 804 , a memory 806 , a storage device 808 , an input/output interface 810 and a network interface 812 .
- a bus 802 is a data transmission path for the processor 804, memory 806, storage device 808, input/output interface 810, and network interface 812 to transmit and receive data to and from each other.
- the processor 804 is an arithmetic processing device implemented using a microprocessor or the like.
- a memory 806 is a memory implemented using a RAM (Random Access Memory) or the like.
- the storage device 808 is a storage device implemented using ROM (Read Only Memory), flash memory, or the like.
- the input/output interface 810 is an interface for connecting the integrated circuit 80 with peripheral devices.
- an input/output interface 810 is connected to a drive circuit 141 for the light source 14, a detection circuit 181 for the light receiving element 18, and a drive circuit 163 for the movable mirror 16.
- a network interface 812 is an interface for connecting the integrated circuit 80 to a communication network.
- This communication network is, for example, a CAN (Controller Area Network), Ethernet, LVDS (Low Voltage Differential Signaling), or the like.
- a method for connecting the network interface 812 to the communication network may be a wireless connection or a wired connection.
- the storage device 808 stores program modules for realizing the functions of the control unit 120 and the information generation unit 121 .
- the processor 804 implements the functions of the control unit 120 and the information generation unit 121 by reading this program module into the memory 806 and executing it.
- the hardware configuration of the integrated circuit 80 is not limited to the configuration shown in this figure.
- program modules may be stored in memory 806 .
- integrated circuit 80 may not include storage device 808 .
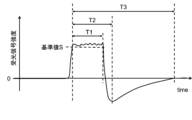
- FIGS. 5 and 6 are diagrams exemplifying received light signal waveforms of internally reflected light when the transmissive member 20 has adhering matter.
- the information generator 121 can specify, for example, the waveform of the received light signal at the light receiving unit 180 within a predetermined time from the emission of the light as the waveform of the internally reflected light.
- the information generating section 121 may consider the pulsed light received first after the pulsed light is emitted to be the internally reflected light. This is because the internally reflected light is reflected from a fixed short distance.
- the received light signal waveform of the internally reflected light differs depending on the type of the adhering matter, such as whether the adhering matter is water, oil, dust, or the like.
- the information generation unit 121 generates distance measurement information using the characteristics of the received light signal waveform. Further, as described above, the distance measuring device 10 performs distance measurement by sequentially emitting a plurality of lights. The information generator 121 then generates distance measurement information for each light emission. The generation of distance measurement information will be described in detail below.
- the information generation unit 121 can generate distance measurement information, for example, using the intensity of the internally reflected light in the light reception result.
- the intensity of the internally reflected light is increased by being reflected by the adhering substance.
- the received light intensity is particularly high, it exceeds the detection range of the light receiving section 180, and the received light signal may be saturated as shown in FIGS.
- the reflected light from the object 30 is also attenuated, so the distance measurement performance is deteriorated. Therefore, it can be said that the greater the intensity of the internally reflected light, the lower the distance measurement performance.
- the information generation unit 121 specifies the maximum intensity of the light reception signal of the internally reflected light for each emitted light as the intensity of the internally reflected light, and uses it to generate distance measurement information.
- the information generation unit 121 can generate distance measurement information using, for example, the length of time related to the saturation of the light receiving unit 180 by the internally reflected light.
- the waveform will be subject to saturation over time.
- the light receiving section 180 receives the reflected light from the object 30 after receiving the internally reflected light.
- the reception of the reflected light from the object 30 may also be affected. For example, if the reflected light from the object 30 enters the light receiving element 18 before the light receiving signal returns to the reference level after saturation, the peak may not be detected accurately. Then, the distance to the object 30 cannot be calculated correctly. Therefore, it can be said that there is a tendency that the longer the length of time related to saturation, the lower the ranging performance.
- Time lengths related to saturation that can be used for determination include, for example, times T1, T2, and T3 shown in FIGS. Note that the length of time related to saturation is hereinafter simply referred to as "saturation time".
- the saturation time is at least one of times T1, T2, and T3.
- the information generator 121 may use only one of the times T1, T2, and T3, or may use a combination of two or more. Each of the times T1, T2, and T3 will be discussed in detail below.
- the time T1 is the length of time during which the light receiving section 180 is saturated.
- the information generation unit 121 determines that the light receiving unit 180 is saturated when the light receiving signal output from the light receiving unit 180 exceeds a predetermined reference value S, and measures the time T1.
- the reference value S is, for example, slightly smaller than the saturation level of the light receiving element.
- the saturation level means the maximum amount of light that can be detected without saturating the light receiving section 180 .
- the time T2 is the length of time starting from the point at which saturation begins in the output waveform of the light receiving section 180 and ending at the point at which the slope becomes zero for the first time after saturation.
- the information generation unit 121 determines that the saturation starts when the light receiving signal output from the light receiving unit 180 exceeds the reference value S described above after the pulsed light is emitted. Further, the information generator 121 calculates the slope at each point of the waveform, detects the point in time when the calculated slope becomes zero, and measures the time T2.
- Time T3 is the length of time from the point at which saturation begins in the output waveform of the light receiving section 180 to the point at which zero crosses the second time after saturation or the point at which it converges for the first time after saturation, whichever is earlier. be.
- the information generation unit 121 determines that the saturation starts when the light receiving signal output from the light receiving unit 180 exceeds the reference value S described above after the pulsed light is emitted.
- the information generator 121 detects the point in time when the received light signal crosses zero, and specifies the point in time when the light-receiving signal crosses zero for the second time after saturation.
- the information generation unit 121 determines that the signal value is in a convergence state when a state in which the signal value is within a predetermined convergence level range continues for a predetermined length.
- the point at which that state begins that is, the point at which the signal value changes from outside the convergence level range to within the convergence level range is regarded as the first convergence point after saturation. Identify.
- the convergence level range is a range including zero in between, the upper limit of the convergence level range is slightly greater than zero, and the lower limit of the convergence level range is slightly less than zero.
- the difference between the upper convergence level range and zero can be greater than the difference between the lower convergence level range and zero. This is because, for example, when disturbance light is incident on the distance measuring device 10, the received light signal may converge to a level greater than zero due to the disturbance light.
- the information generator 121 selects the earlier of the second zero-crossing point after saturation and the first convergence point after saturation, and measures time T3. It is not necessary that either the second zero-crossing point after saturation or the first convergence point after saturation does not exist. In this case, the information generation unit 121 determines the end point of T3 to be the end point of T3, whichever can be specified, out of the second zero-crossing point after saturation and the first convergence point after saturation. In the example of FIG. 6, T2 and T3 are the same.
- the end point of time T3 may be the first point in time when the received light signal is within the convergence level range and the slope of the received light signal is within a predetermined range including zero after the end of the saturated state.
- the information generator 121 generates distance measurement information using the amount of change from the initial value for the intensity and saturation time of the internally reflected light. By doing so, the influence of deposits can be more accurately identified.
- the initial value it is possible to use a value measured in a state in which there is no deposit on the transmissive member 20, for example, in a shipping state.
- the information generation unit 121 identifies an object region corresponding to a region in which an adhering matter is present on the transmissive member 20 by using the distribution of light reception results of internally reflected light in a plurality of light emission directions, and Ranging information can be generated based on the position at .
- FIG. 7 is a diagram schematically showing the distribution of the internal reflected light intensity within the frame.
- the information generation unit 121 can generate such an internal reflected light intensity map using internal reflected light intensities corresponding to a plurality of emission directions. As described above, the internal reflected light intensity used here is preferably the amount of change from the initial value. From the internal reflected light intensity map, it is possible to identify the area where the deposit is generated in the scanning range. Specifically, the information generation unit 121 identifies, as an object area, an area where the internal reflected light intensity is equal to or greater than a predetermined value in the internal reflected light intensity map.
- the distance measurement capability of the distance measuring device 10 also depends on the relationship between the position of the adhering matter and the emission direction. For example, light emitted toward the center of the deposit is affected more by the deposit than light emitted toward the edge of the deposit. In other words, the influence on distance measurement is also increased. Therefore, the information generation unit 121 can generate distance measurement information based on the position within the object area. Specifically, the information generation unit 121 calculates the shortest distance from the outer edge of the object area for each point (radiation direction) within the identified object area. It can be said that the longer the shortest distance, the closer the point is to the center of the object area, and the easier it is for the distance measurement to deteriorate. For points outside the object area, a sufficiently large default value is set as the shortest distance.
- the information generation unit 121 generates a saturation time map using saturation times corresponding to a plurality of emission directions or the amount of change from the initial value of the saturation time, instead of the internal reflected light intensity map, and generates a saturation time map. may be used to identify the
- the information generation unit 121 performs determination based on a rule based on the result of receiving the internally reflected light, and generates distance measurement information.
- the information generation unit 121 performs the following processing each time measurement of one frame is completed, and generates distance measurement information for each measurement point within that frame.
- the information generating section 121 may generate the distance measurement information for each light emission.
- FIG. 8 is a table illustrating determination rules for generating distance measurement information from the result of receiving internally reflected light.
- FIG. 9 is a flowchart illustrating the flow of determination by the information generator 121 when using the determination rule of FIG.
- the information generation unit 121 generates distance measurement information using the internal reflected light intensity, the saturation time, and the shortest distance from the outer edge of the object region.
- the information generation unit 121 generates a deterioration prediction level as distance measurement information.
- the degree of deterioration increases in the order of "deterioration level C", "deterioration level B", and "deterioration level A".
- the information generation unit 121 determines whether or not the internal reflected light intensity at the determination target point is greater than or equal to the reference value S (S101). When the internal reflected light intensity is not equal to or greater than the reference value S (No in S101), the information generator 121 determines that the deterioration prediction level at that point is "standard" (S102). When the internal reflected light intensity is equal to or greater than the reference value S (Yes in S101), the information generation unit 121 then determines whether the saturation time of the determination target point is equal to or greater than the reference value A (S103).
- the information generator 121 determines the deterioration prediction level at that point to be "deterioration level A" (S104). If the saturation time is greater than or equal to the reference value A (Yes in S103), the information generation unit 121 then determines whether the shortest distance from the outer edge of the object region of the determination target point is greater than or equal to the reference value B ( S105). If the shortest distance is not equal to or greater than the reference value B (No in S105), the information generator 121 determines the predicted deterioration level of that point to be "deterioration level B" (S106).
- the information generator 121 determines the predicted deterioration level of that point to be "deterioration level C" (S107). Thus, the information generator 121 can specify the deterioration level on a rule basis.
- the information generation unit 121 may generate information regarding distance measurement using a determination rule provided for each configuration of the optical system of the distance measuring device 10 . Since the effect of adhering matter on distance measurement performance differs depending on the configuration of the optical system, it is preferable to use a suitable determination rule for each configuration. The fact that the configuration of the optical system affects the distance measurement performance differently will be described below.
- FIG. 10(a) is a diagram schematically showing the transmissive member 20 of the distance measuring device 10 with no telephoto lens attached
- FIGS. 10(b) and 10(c) with the telephoto lens attached
- 4 is a diagram schematically showing a transmissive member 20 of the distance measuring device 10;
- FIG. 10(a) to 10(c) a broken-line rectangle 210 indicates the effective scanning area
- a solid-line rectangle 211 indicates the spot shape and size of the light emitted from the distance measuring device 10 on the transmissive member 20.
- an ellipse 212 indicate the shape and size of the light receiving spot on the transmissive member 20 .
- the effective scanning area is an area through which emitted light can pass in the transmissive member 20 when performing scanning for generating one frame.
- the light-receiving spot is an area capable of receiving light that is emitted from the distance measuring device 10 and reflected by the object 30 and then incident on the distance measuring device 10 .
- the size of the light spot with respect to the effective scanning area varies greatly depending on the presence or absence of the telephoto lens.
- FIG. 11 is a diagram showing the results of measurement with an adhering matter attached to the transmissive member 20 of the distance measuring device 10 to which no telephoto lens is attached.
- 12A and 12B are diagrams showing the results of measurement in a state in which an adhering matter is attached to the transmissive member 20 of the distance measuring device 10 to which a telephoto lens is attached.
- 10(a) and 10(c) show the size and shape of the deposit 213 at this time.
- 11 and 12 respectively show an internal reflected light intensity map, a saturation time map, a ranging intensity map, and a distance map obtained in the same frame.
- the internal reflected light intensity map and saturation time map are as described above.
- the ranging intensity map is a map showing the distribution of the peak intensity of the received light signal when the reflected light from the object 30 is received.
- the distance map is a map showing the distribution of distances to the object 30 calculated by receiving reflected light from the object 30 .
- each map there is an area corresponding to deposits inside the dashed ellipse. 11 and 12 are the same in size.
- the contaminants that are assumed to be attached are raindrops, dust, insects, snow, etc., and their sizes are generally several millimeters. Assuming this size, the size of the deposit used in the measurements of FIGS. 11 and 12 was set to 2 mm ⁇ 3 mm.
- the influence of the deposit appears in the shape close to the actual shape in the internal reflected light intensity map and the saturation time map. Also, in the ranging intensity map and the distance map, it appears that the ranging was impossible in the area where the adhering matter existed.
- the influence appears in a large area with respect to the frame in the internal reflected light intensity map. This is due to the large size of the deposit relative to the effective scanning area. In the saturated time map, the effect decreases from the center of the object area to the outer edge. Also, in the distance measurement intensity map, a strong effect can be seen in the center of the object area, but in the distance map, there are many parts where the effect does not appear, and it can be seen that the distance can be measured over the entire frame. This is believed to be due to the fact that the spot of light and the deposit are of similar size.
- the information generating unit 121 acquires, for example, information indicating the configuration of the optical system input in advance to 10, and reads out and uses the determination rule corresponding to the configuration from the storage unit.
- the image is distorted due to the orbit of the movable mirror 16 and the effect of the optical lens. Since such distortion is known, a process of correcting each map using a predetermined correction parameter may be performed. In that case, the outline of the map need not be rectangular. Alternatively, the outer shape of the map may remain rectangular, and processing may be performed to correct the distortion of the projected object or the like as necessary. The same applies to the deterioration map, which will be described later.
- the information generation unit 121 may generate a ranging map showing the distribution of the ranging information. Further, the distance measuring device 10 may generate and output display data for displaying the generated distance map as an image. The ranging device 10 can display a ranging map by outputting display data to a display. Note that the distance measuring device 10 may store the generated distance measuring property information in a storage unit accessible from the distance measuring device 10 . This storage unit may or may not be included in the distance measuring device 10 .
- FIG. 13 is a diagram illustrating an image displaying a distance map.
- a degradation map of ranging performance is displayed as a ranging map.
- a table is also displayed showing what range-finding limit distances each deterioration level corresponds to under a plurality of conditions.
- Such a table can be prepared by preliminary experimental measurements and stored in the storage unit. For example, in this example, it can be seen that the critical distance at which a target with 100% reflectance can be measured with a background light of 100 klux is 30 m in the region of deterioration level C in the frame.
- FIG. 14 is a flowchart illustrating the flow of the information generation method according to this embodiment.
- the information generating method according to the present embodiment is executed by a computer to generate distance measurement information of the distance measuring device 10 that emits light output from a light source through a transparent member and detects reflected light from an object. It is an information generation method for In this method, the light receiving result of the internally reflected light is acquired by the light receiving unit that receives at least the internally reflected light including the reflected light reflected by the transmissive member 20 (S500). Then, using the result of receiving the internally reflected light, distance measurement information of the distance measuring device 10 is generated (S510).
- the information generating section 121 generates the distance measuring performance information of the distance measuring device 10 using the light receiving result of the internally reflected light by the light receiving section 180 . Therefore, it is possible to identify the influence of deposits on the output window of the range finder on the range finder, confirm whether the user meets the required range finder performance, and take necessary measures. .
- the distance measuring device 10 according to the second embodiment is similar to the distance measuring device 10 according to the first embodiment, except that the information generation unit 121 generates the distance measurement information using the learned model 40 by machine learning. Same as device 10 . A detailed description is given below.
- the information generation unit 121 uses the model 40 instead of using the determination rule to generate distance measurement information from the result of receiving the internally reflected light.
- the model 40 is a model that receives, for example, the result of receiving internally reflected light as an input and outputs distance measurement information.
- FIG. 15 is a diagram exemplifying the learned model 40 used by the information generation unit 121 according to the second embodiment.
- the information generation unit 121 acquires the learned model 40 by reading it from a storage unit accessible from the information generation unit 121 .
- the information generator 121 inputs input data to the model 40 and obtains output data of the model 40 .
- the input data to be input to the model 40 may be the waveform of the internally reflected light, the intensity of the internally reflected light, the saturation time, the shortest distance from the outer edge of the object area, or a vector containing them.
- Input data for the model 40 may also include, for example, an internal reflection intensity map and a saturation time map.
- the output data of model 40 is, for example, the predicted deterioration level of each point in the frame.
- the output data may be a map, such as a degradation map.
- the input data and output data of the model 40 may be measured point by measurement point or frame by frame.
- the input data of the model 40 may further include information indicating the configuration of the distance measuring device 10 when the light reception result is obtained.
- the configuration of distance measuring device 10 includes, for example, the configuration of an optical system.
- the model 40 may be provided for each configuration of the distance measuring device 10 .
- the information generating section 121 acquires information indicating the configuration of the distance measuring device 10, reads out the model 40 corresponding to the configuration from the storage section, and uses it.
- the trained model 40 includes a neural network 410.
- the learned model 40 is a model that has undergone machine learning in advance using a plurality of training data.
- the information generation unit 121 can improve the accuracy of the distance measurement information.
- the information generating unit 121 may combine the rule-based determination as described in the first embodiment and the determination using the model 40 to generate range finding information.
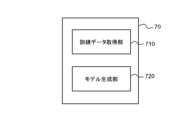
- FIG. 16 is a block diagram illustrating the functional configuration of an apparatus that generates models.
- the model generation device 70 includes a training data acquisition section 710 and a model generation section 720 .
- the training data acquisition unit 710 acquires training data in which the result of receiving the internally reflected light and the range finding information of the range finder are associated with each other.
- the result of receiving the internally reflected light includes the reflected light reflected by the transmitting member 20 in a distance measuring device that emits the light output from the light source 14 through the transmitting member 20 and detects the reflected light from the object. This is the result of receiving internal reflected light.
- the model generation unit 720 performs machine learning using training data to generate the model 40 that receives the result of receiving the internally reflected light as an input and outputs distance measurement information.
- a plurality of training data can be prepared by preliminary experimental measurements and stored in the storage unit.
- the training data acquisition unit 710 acquires the training data by reading it from the storage unit, for example.
- the range finder 10 according to the third embodiment is similar to the range finder 10 according to at least one of the first and second embodiments, except that the control unit 120 performs control using range finding information. are the same.
- the control unit 120 controls at least one of the output intensity of the light source 14 and the multiplication factor of the light receiving unit 180 based on the range finding information. A detailed description is given below.
- the control unit 120 When a range map is generated for a certain frame, the control unit 120 performs control based on the generated range map when measuring subsequent frames. Specifically, when measuring in a certain emission direction, the control unit 120 specifies the distance measurement information for that emission direction by referring to the distance measurement map. Then, at least one of the output intensity of the light source 14 and the multiplication factor of the light receiving section 180 is controlled based on the specified range finding information. For example, the information generation unit 121 increases the output intensity of the light source 14 as the degree of deterioration indicated by the range finding information increases. By doing so, even if the light is attenuated by the adhering matter, light of sufficient intensity can be output from the distance measuring device 10 .
- the information generation unit 121 increases the multiplication factor of the light receiving unit 180 as the degree of deterioration indicated in the range finding information is higher. By doing so, even when the reflected light from the object 30 is weak, a sufficiently strong received light signal can be obtained.
- the control unit 120 acquires reference information from a storage unit accessible from the control unit 120 and uses it for control.
- the reference information is information that associates the deterioration level with the output intensity of the light source 14 or information that associates the deterioration level with the multiplication factor of the light receiving section 180 .
- the control unit 120 specifies the output intensity or the multiplication factor corresponding to the deterioration level indicated by the range finding information, and controls the light source 14 or the light receiving unit 180 .
- control unit 120 controls at least one of the output intensity of the light source 14 and the multiplication factor of the light receiving unit 180 based on the range finding information. Therefore, it is possible to perform good distance measurement even when there is an influence of adhering matter.
- FIG. 17 is a block diagram illustrating the functional configuration of the distance measuring device 10 according to the fourth embodiment.
- the distance measuring device 10 according to this embodiment is the same as the distance measuring device 10 according to at least one of the first to third embodiments, except that it further includes a notification unit 123 that performs notification using distance measurement information.
- the notification unit 123 acquires information indicating the notification target area in the distance measurement map, and performs notification based on the distance measurement information of the notification target area. A detailed description is given below.
- the notification is, for example, a warning indicating that the ranging performance has deteriorated.
- the notification unit 123 issues a warning about deterioration of the distance measurement performance within the notification target area, but does not consider the distance measurement information outside the notification target area in the notification. In other words, even when the distance measurement performance deteriorates outside the notification target area, the notification unit 123 does not issue a warning or the like.
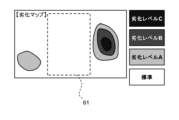
- FIG. 18 is a diagram for explaining the notification target area 61.
- FIG. A user designates in advance a notification target area 61 in a frame for the distance measuring device 10 according to the present embodiment.
- Range finder 10 receives an input designating notification target area 61 from the user.
- the notification unit 123 acquires information indicating the notification target area 61 input to the distance measuring device 10 .
- the reporting unit 123 acquires the ranging map from the information generating unit 121 when the ranging map is generated. Then, the notification unit 123 determines whether deterioration of the ranging performance is found in the notification target area 61 in the ranging map. If deterioration in distance measurement performance is found within the notification target area 61, the notification unit 123 outputs a warning.
- the notification unit 123 when no degradation of distance measurement performance is found within the notification target area 61, the notification unit 123 does not output a warning. Degradation of the ranging performance is found within the notification target area 61 in the ranging map, for example, when at least part of the deterioration prediction level within the notification target area 61 is not "standard". Alternatively, it is a case where the deterioration prediction level of at least a part of the notification target area 61 is worse than a predetermined level. Further, the notification unit 123 does not output a warning even when deterioration of the distance measurement performance is found outside the notification target area 61 as shown in FIG. 18 .
- the notification unit 123 can output the warning by, for example, voice output or display on the display.
- the notification unit 123 acquires the conditions input by the user. For example, the user sets "background light of 0 lux" and “target reflectance of 10%” as the usage environment information, and inputs the condition of "distance measurement limit distance of 30 m or more" as the required performance condition. Then, when the notification unit 123 no longer satisfies the condition of "having a distance measurement limit distance of 30 m or more for measurement with a background light of 0 lux and a target reflectance of 10%" in at least a part of the notification target area 61, Print a warning. Whether or not the set conditions are satisfied can be determined using a table such as that shown in FIG. 13, for example, in addition to the generated distance measurement information.
- the notification unit 123 indicates that the ranging performance is good when no degradation of the ranging performance is seen within the notification target area 61. You may notify us.
- the storage device 808 further stores program modules for realizing the function of the notification unit 123.
- the processor 804 implements the function of the notification unit 123 by reading this program module into the memory 806 and executing it.
- the range finder 10 further includes the notification unit 123 that performs notification using the range finding information. Therefore, it is easy for the user to grasp the deterioration of the ranging performance.
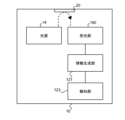
- FIG. 19 is a block diagram illustrating the configuration of an information generation device 50 according to the fifth embodiment.
- the information generation device 50 according to the present embodiment emits the light output from the light source 14 through the transmission member 20 and generates distance measurement information of the distance measurement device 10 that detects the reflected light from the target object 30. It is an information generating device that The information generation device 50 includes an information generation section 510 .
- the information generation unit 510 generates distance measurement information of the distance measuring device 10 using the result of receiving the internally reflected light by the light receiving unit 180 that receives at least the internally reflected light including the reflected light reflected by the transmissive member 20 . . A detailed description is given below.
- the distance measuring device 10 is the same as the distance measuring device 10 according to at least one of the first to third embodiments, except that the information generation unit 121 is not provided.
- the range finder 10 according to this embodiment is the same as the range finder 10 according to the fourth embodiment, except that the information generation unit 121 and the notification unit 123 are not provided.
- the information generation device 50 according to the present embodiment acquires information necessary for generating distance measurement information from the distance measurement device 10 and generates the information.
- the information generation device 50 includes an information generation section 510 .
- the information generator 510 performs the same processing as the information generator 121 according to the first or second embodiment.
- the information generation device 50 may further include a notification unit similar to the notification unit 123 according to the fourth embodiment.
- the information generating device 50 acquires information indicating the result of receiving the internally reflected light from the distance measuring device 10 . Then, the information generating section 510 generates distance measuring performance information of the distance measuring device 10 based on the information indicating the result of receiving the internally reflected light.
- the generated distance measurement information may be output from the information generation device 50 to the distance measurement device 10 and used for control by the control unit 120, or may be output from the information generation device 50 to a display or the like. Further, the generated distance measurement information may be held in a storage accessible from the information generation device 50 .
- This storage unit may be a storage unit included in information generation device 50 (for example, storage device 908 described later), or may be a storage unit provided outside information generation device 50 .
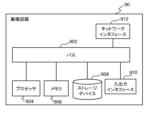
- FIG. 20 is a diagram illustrating the hardware configuration of the information generation device 50 according to this embodiment.
- the information generation device 50 is implemented using an integrated circuit 90 .
- the integrated circuit 90 is, for example, an SoC (System On Chip).
- the integrated circuit 90 has a bus 902 , a processor 904 , a memory 906 , a storage device 908 , an input/output interface 910 and a network interface 912 .
- a bus 902 is a data transmission path for the processor 904, memory 906, storage device 908, input/output interface 910, and network interface 912 to transmit and receive data to and from each other.
- the processor 904 is an arithmetic processing device implemented using a microprocessor or the like.
- a memory 906 is a memory implemented using a RAM (Random Access Memory) or the like.
- the storage device 908 is a storage device implemented using a ROM (Read Only Memory), flash memory, or the like.
- the input/output interface 910 is an interface for connecting the integrated circuit 90 with peripheral devices.
- the rangefinder 10 is connected to the input/output interface 910 .
- a network interface 912 is an interface for connecting the integrated circuit 90 to a communication network.
- This communication network is, for example, a CAN (Controller Area Network) communication network.
- a method for connecting the network interface 912 to the communication network may be a wireless connection or a wired connection.
- the storage device 908 stores program modules for realizing the functions of the information generation unit 510 .
- the processor 904 implements the function of the information generator 510 by reading this program module into the memory 906 and executing it. Also, the storage device 908 may further store a program module for implementing the notification unit.
- the hardware configuration of the integrated circuit 90 is not limited to the configuration shown in this figure.
- program modules may be stored in memory 906 .
- integrated circuit 90 may not include storage device 908 .
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Measurement Of Optical Distance (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US18/709,979 US20250004132A1 (en) | 2021-11-18 | 2022-11-18 | Distance measurement apparatus, model generation apparatus, information generation apparatus, information generation method, and non-transitory storage medium |
| JP2023562412A JP7611422B2 (ja) | 2021-11-18 | 2022-11-18 | 測距装置、モデル生成装置、情報生成装置、情報生成方法、およびプログラム |
| EP22895695.9A EP4435470A4 (en) | 2021-11-18 | 2022-11-18 | DISTANCE MEASURING DEVICE, MODEL GENERATION DEVICE, INFORMATION GENERATION DEVICE, INFORMATION GENERATION METHOD, AND PROGRAM |
| CN202280076156.0A CN118302694A (zh) | 2021-11-18 | 2022-11-18 | 测距装置、模型生成装置、信息生成装置、信息生成方法及程序 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-187617 | 2021-11-18 | ||
| JP2021187617 | 2021-11-18 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023090414A1 true WO2023090414A1 (ja) | 2023-05-25 |
Family
ID=86397047
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/042825 Ceased WO2023090414A1 (ja) | 2021-11-18 | 2022-11-18 | 測距装置、モデル生成装置、情報生成装置、情報生成方法、およびプログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20250004132A1 (https=) |
| EP (1) | EP4435470A4 (https=) |
| JP (1) | JP7611422B2 (https=) |
| CN (1) | CN118302694A (https=) |
| WO (1) | WO2023090414A1 (https=) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011013135A (ja) * | 2009-07-03 | 2011-01-20 | Nippon Signal Co Ltd:The | 光測距装置 |
| CN109541616A (zh) * | 2018-10-09 | 2019-03-29 | 天津大学 | Bp神经网络雨、雪、雾天气脉冲激光测距方法 |
| JP2021032563A (ja) * | 2019-08-13 | 2021-03-01 | ソニーセミコンダクタソリューションズ株式会社 | 装置、測定装置および測距システム |
| JP2021187617A (ja) | 2020-05-29 | 2021-12-13 | 株式会社 資生堂 | 物品リジェクト装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5804467B2 (ja) * | 2010-03-31 | 2015-11-04 | 北陽電機株式会社 | 信号処理装置、及び走査式測距装置 |
| JP6365364B2 (ja) * | 2015-03-17 | 2018-08-01 | 株式会社デンソーウェーブ | 光学的距離測定装置 |
| WO2019064062A1 (en) * | 2017-09-26 | 2019-04-04 | Innoviz Technologies Ltd. | SYSTEMS AND METHODS FOR DETECTION AND LOCATION BY LIGHT |
| JP2020076589A (ja) * | 2018-11-06 | 2020-05-21 | 日本電産モビリティ株式会社 | 対象物検出装置 |
| US10969491B1 (en) * | 2020-08-14 | 2021-04-06 | Aeva, Inc. | LIDAR window blockage detection |
-
2022
- 2022-11-18 CN CN202280076156.0A patent/CN118302694A/zh active Pending
- 2022-11-18 JP JP2023562412A patent/JP7611422B2/ja active Active
- 2022-11-18 WO PCT/JP2022/042825 patent/WO2023090414A1/ja not_active Ceased
- 2022-11-18 US US18/709,979 patent/US20250004132A1/en active Pending
- 2022-11-18 EP EP22895695.9A patent/EP4435470A4/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011013135A (ja) * | 2009-07-03 | 2011-01-20 | Nippon Signal Co Ltd:The | 光測距装置 |
| CN109541616A (zh) * | 2018-10-09 | 2019-03-29 | 天津大学 | Bp神经网络雨、雪、雾天气脉冲激光测距方法 |
| JP2021032563A (ja) * | 2019-08-13 | 2021-03-01 | ソニーセミコンダクタソリューションズ株式会社 | 装置、測定装置および測距システム |
| JP2021187617A (ja) | 2020-05-29 | 2021-12-13 | 株式会社 資生堂 | 物品リジェクト装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4435470A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4435470A4 (en) | 2025-10-15 |
| US20250004132A1 (en) | 2025-01-02 |
| JPWO2023090414A1 (https=) | 2023-05-25 |
| JP7611422B2 (ja) | 2025-01-09 |
| EP4435470A1 (en) | 2024-09-25 |
| CN118302694A (zh) | 2024-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109959942B (zh) | 距离测量设备、识别设备和距离测量方法 | |
| US9891432B2 (en) | Object detection device and sensing apparatus | |
| JP2022043265A (ja) | 測定装置 | |
| US12165343B2 (en) | Enhancing depth estimation with brightness image | |
| JP2018087703A (ja) | 制御装置、測定装置、およびコンピュータプログラム | |
| WO2024106214A1 (ja) | 物体検知装置及び物体検知方法 | |
| WO2023090414A1 (ja) | 測距装置、モデル生成装置、情報生成装置、情報生成方法、およびプログラム | |
| US20220244392A1 (en) | High resolution lidar scanning | |
| WO2022176679A1 (ja) | 測距補正装置、測距補正方法、測距補正プログラム、および測距装置 | |
| JP7656723B2 (ja) | 測距装置 | |
| JP7642866B2 (ja) | 測距装置、判定装置、判定方法、およびプログラム | |
| JP2020034456A (ja) | 信号処理装置 | |
| WO2023042637A1 (ja) | 制御装置、制御方法、制御プログラム | |
| WO2023047928A1 (ja) | 制御装置、制御方法、制御プログラム | |
| US20250052898A1 (en) | Distance measurement apparatus and distance measurement method | |
| JP2022125966A (ja) | 測距補正装置、測距補正方法、測距補正プログラム、および測距装置 | |
| JP2023068471A (ja) | 制御装置、制御方法、制御プログラム | |
| CN207020306U (zh) | 一种具有组合孔径的激光扫描装置及其激光雷达装置 | |
| JP7762088B2 (ja) | 測定装置 | |
| CN116626688B (zh) | 一种消除多路径误差的itof测距系统及方法 | |
| JP7762089B2 (ja) | 測定装置 | |
| US20260063415A1 (en) | Depth sensing system and method thereof | |
| US20260126531A1 (en) | Polarization-based crosstalk mitigation in optical ranging sensors | |
| JP2024103864A (ja) | 測定装置、測定方法、およびプログラム | |
| CN120214742A (zh) | 回波信号处理方法、装置、激光雷达系统和可读存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22895695 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023562412 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18709979 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202280076156.0 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022895695 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2022895695 Country of ref document: EP Effective date: 20240618 |