WO2023002799A1 - 回転角検出装置 - Google Patents
回転角検出装置 Download PDFInfo
- Publication number
- WO2023002799A1 WO2023002799A1 PCT/JP2022/025103 JP2022025103W WO2023002799A1 WO 2023002799 A1 WO2023002799 A1 WO 2023002799A1 JP 2022025103 W JP2022025103 W JP 2022025103W WO 2023002799 A1 WO2023002799 A1 WO 2023002799A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- rotation angle
- spacer
- detection device
- detected
- angle detection
- Prior art date
Links
- 238000001514 detection method Methods 0.000 claims abstract description 80
- 125000006850 spacer group Chemical group 0.000 claims description 60
- 230000001939 inductive effect Effects 0.000 claims description 2
- 230000005284 excitation Effects 0.000 description 13
- 230000004907 flux Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 5
- 238000009434 installation Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 239000004020 conductor Substances 0.000 description 1
- 239000011796 hollow space material Substances 0.000 description 1
- 230000005389 magnetism Effects 0.000 description 1
Images










Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/30—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring angles or tapers; for testing the alignment of axes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/20—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/22—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating around the armatures, e.g. flywheel magnetos
- H02K21/222—Flywheel magnetos
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Definitions
- the present disclosure relates to a rotation angle detection device for detecting the rotation angle of a rotor of a rotating electric machine.
- the outer rotor type motor described in Patent Document 1 and the like includes a stator, a rotating shaft provided rotatably inside the stator in the radial direction, and an outer rotor rotating together with the rotating shaft outside the stator in the radial direction. have.
- a portion to be detected is provided on the rotating shaft, and a detection portion for detecting the position of the portion to be detected is provided at a position facing the portion to be detected.
- Patent Document 1 since there is a part to be detected on the rotating shaft, the detecting part must be installed near the rotating shaft.
- the periphery of the outer rotor type rotary electric machine there is often a shortage of space radially inward.
- some rotary electric machines are installed inside tire wheels as in-wheel motors.
- the brake and the inverter are built in the hollow space inside the tire wheel, as described above, the space around the rotating electric machine is insufficient in the radially inward direction. Therefore, it becomes difficult to install the detector.
- the present disclosure has been made in view of the above circumstances, and a main object thereof is to provide a rotation angle detection device in which a detection unit can be easily installed when applied to an outer rotor type rotating electric machine.
- the rotation angle detection device of the present disclosure is applied to a rotating electric machine having an outer rotor that rotates about an axis and a stator that is provided radially inward of the outer rotor.
- the rotation angle detection device includes a detection portion attached to the outer rotor, and a detection portion arranged to face the detection portion outside the stator in a radial direction, and detecting the position of the detection portion. and have
- the portion to be detected is attached to the outer rotor, and the detection portion is arranged to face the portion to be detected radially outward of the stator. Therefore, even if there is a shortage of space radially inwardly around the rotating electric machine, the detecting section is installed radially outwardly of the stator, so it does not interfere with the radially inward space shortage. hard. Therefore, even when the rotation angle detection device is applied to an outer rotor type rotating electric machine, the detection section can be easily installed.
- FIG. 1 is a front cross-sectional view showing a rotary electric machine, a rotation angle detection device, etc. of the first embodiment
- FIG. 2 is a side view showing a rotating electric machine and a rotation angle detection device
- FIG. 3 is a partial cross-sectional perspective view showing a cross-section of the rotary electric machine and the rotation angle detection device
- FIG. 4 is an exploded perspective view showing the rotation angle detection device
- FIG. 5 is a circuit diagram showing a detection circuit when the part to be detected is at the first position
- FIG. 6 is a circuit diagram showing a detection circuit when the part to be detected is at the second position
- FIG. 5 is a circuit diagram showing a detection circuit when the part to be detected is at the first position
- FIG. 6 is a circuit diagram showing a detection circuit when the part to be detected is at the second position
- FIG. 5 is a circuit diagram showing a detection circuit when the part to be detected is at the first position
- FIG. 6 is a circuit diagram showing a detection circuit when the part
- FIG. 7 is a circuit diagram showing a detection circuit when the part to be detected is at the third position;
- FIG. 8 is a circuit diagram showing a detection circuit when the part to be detected is at the fourth position;
- FIG. 9 is a graph showing the waveform of the excitation current and the waveform of the received voltage;
- FIG. 10 is an exploded perspective view showing the rotation angle detection device of the second embodiment;
- FIG. 11 is a perspective view showing the rotation angle detection device of the third embodiment;
- FIG. 12 is a partial cross-sectional perspective view showing the motor and the rotation angle detection device of the fourth embodiment;
- FIG. 13 is a perspective view showing the rotation angle detection device of the fifth embodiment;
- FIG. 14 is a partial cross-sectional perspective view showing the motor and the rotation angle detection device of the sixth embodiment.
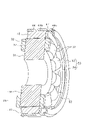
- FIG. 1 is a front sectional view showing a rotary electric machine 29 and a rotation angle detection device 50 of the first embodiment.
- the rotation angle detection device 50 is applied to the rotating electric machine 29 .
- the rotating electric machine 29 is an in-wheel motor and is provided inside the wheel 63 of the tire 67 of the electric vehicle.
- the rotating electrical machine 29 has an outer rotor 40 that rotates about its axis together with the tires 67 and the wheels 63 , and a stator 30 that is provided radially inward of the outer rotor 40 .
- FIG. 2 is a side view showing the rotating electrical machine 29, and more specifically, is a side view of the rotating electrical machine 29 viewed leftward in FIG.
- the stator 30 has a stator yoke 31 having an annular shape around its axis, a plurality of teeth 32 protruding radially outward from the stator yoke 31 , and a three-phase coil 37 wound around each tooth 32 .
- the outer rotor 40 has a rotating shaft 41, a rotor body 44, permanent magnets 46, and spacers 47.
- the rotating shaft 41 is rotatably provided on the axis radially inward of the stator yoke 31 .
- a bearing 39 such as a bearing is provided between the stator yoke 31 and the rotating shaft 41 .
- the rotor body 44 is attached to the rotating shaft 41 and rotates together with the rotating shaft 41 .
- the rotor body 44 has a cylindrical shape with a bottom that is open in one axial direction (rightward in the figure), and has a cylindrical rotor yoke 44b and a bottom portion 44a that connects the rotor yoke 44b and the rotating shaft 41 .
- Permanent magnets 46 and spacers 47 are attached to rotor body 44 and rotate with rotor body 44 .
- An inverter 21 for supplying a 3-phase alternating current to the 3-phase coil 37 and a brake pad 25 for decelerating the rotation of the tire 67 and the wheel 63 are installed on one side of the rotating electric machine 29 in the axial direction. It is The inverter 21 and the brake pads 25 are installed radially inward from the inner peripheral surface of the rotor body 44 , more specifically, radially inward from the outer peripheral surface of the stator 30 .
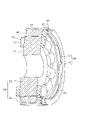
- FIG. 3 is a partially cross-sectional perspective view showing the rotary electric machine 29 and the rotation angle detection device 50.
- the outer rotor 40 is of a surface permanent magnet (SPM) type, and permanent magnets 46 are fixed to the radially inner surface of the rotor body 44 .
- a radially inwardly protruding flange portion 44c is provided on the radially inner surface of the "open end of the rotor body 44", which is one end in the axial direction of the rotor yoke 44b.
- the spacer 47 is a non-magnetic and conductive member that is annular about the axis and is interposed between the flange portion 44 c and the permanent magnet 46 . Thereby, the spacer 47 is provided so as to be aligned with the permanent magnet 46 in the axial direction, and positions the permanent magnet 46 with respect to the rotor main body 44 in the axial direction.
- the rotation angle detection device 50 has detected portions 52 as targets provided on the spacer 47 at approximately equal intervals in the direction around the axis, and a detecting portion 54 arranged opposite the detected portions 52 .
- the part to be detected 52 is a non-magnetic and conductive part formed integrally with the spacer 47 .
- Each detected portion 52 is provided on one surface of the spacer 47 in the axial direction, that is, on the surface of the spacer 47 opposite to the permanent magnet 46 side, in the shape of a convex portion projecting in one axial direction.
- each detected portion 52 is engaged with the flange portion 44c in the axial direction. Therefore, the movement of the spacer 47 to one side in the axial direction is restricted.
- the surface of the spacer 47 on the side of the permanent magnets 46 is in contact with each permanent magnet 46 in the axial direction. Therefore, each permanent magnet 46 is also engaged with the flange portion 44c through the spacer 47, and is restricted from moving to one side in the axial direction.
- the radially inner surface of the detected portion 52 is arranged radially outward from the radially inner surface of the permanent magnet 46 .
- the detected portions 52 are arranged at equal intervals in the direction around the axis.
- the width of the detected portion 52 in the radial direction is greater than the width of the flange portion 44c in the radial direction. Therefore, the detected portion 52 protrudes radially inward from the flange portion 44c and is exposed on one side in the axial direction.
- the detection section 54 is a ring-shaped member around the axis, and is fixed to the vehicle body or the like so as to face the detected section 52 .
- the detector 54 is arranged radially outward of the stator 30 and is arranged to face the spacer 47 on one axial side of the rotating electric machine 29 .
- the detecting portion 54 is arranged on the opposite side of the spacer 47 to the permanent magnet 46 side in the axial direction so as to face the exposed portions of the detected portions 52 .
- the center of the detector 54 is arranged coaxially with the axis.
- the outer diameter of the detection portion 54 is slightly smaller than the outer diameter of the rotor body 44 , and the inner diameter of the detection portion 54 is approximately the same as the inner diameter of the spacer 47 .
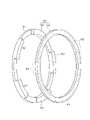
- FIG. 4 is an exploded perspective view showing the rotation angle detection device 50.
- the spacer 47 and the detecting portion 54 are annular, and the detected portion 52 is formed on the annular spacer 47 in a convex shape.
- the detection unit 54 is an inductive sensor, and has a plurality of detection circuits 55 at approximately equal intervals around the axis.
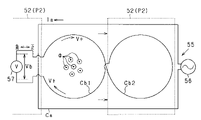
- FIG. 5 is a circuit diagram showing one of the detection circuits 55 arranged side by side around the axis. 4, the detection circuit 55 is actually provided in an arcuate shape along the ring-shaped detection portion 54. However, in FIG. The outline of 55 is shown in a rectangular shape.
- the detection circuit 55 has an excitation circuit Ca and a reception circuit Cb.
- planar view seen in one axial direction is simply referred to as "planar view”.
- the receiving circuit Cb is formed in an ⁇ shape in plan view. Further, hereinafter, in plan view, the left half of the receiving circuit Cb is referred to as “first receiving section Cb1", the right half is referred to as “second receiving section Cb2", and the clockwise rotation in first receiving section Cb1 is referred to as “positive "direction”, and counterclockwise rotation is called “negative direction”.
- the receiving circuit Cb is formed in the shape of the letter ⁇ as described above, the counterclockwise direction of the second receiving portion Cb2 is the “positive direction” and the clockwise direction is the opposite direction of the first receiving portion Cb1.
- a voltage sensor 57 is connected to the receiving circuit Cb for detecting the induced voltage generated in the receiving circuit Cb as a "reception voltage Vb".
- the excitation circuit Ca is formed in a ring that surrounds the ⁇ -shaped receiving circuit Cb in plan view.
- An AC voltage source 56 is connected to the excitation circuit Ca for supplying an AC "excitation current Ia" to the excitation circuit Ca.
- the detected portion 52 overlaps the right half of the first receiving portion Cb1 and the left half of the second receiving portion Cb2 in a plan view (“first position P1”). ” will be described.
- the exciting current Ia increases counterclockwise in plan view
- the magnetic flux ⁇ in the frontward direction of the drawing increases inside the exciting circuit Ca.
- an eddy current is generated in the detected portion 52, which is a conductor, in a direction that cancels out the increase in the magnetic flux ⁇ . Therefore, an increase in the magnetic flux ⁇ is suppressed between the right half of the first receiving portion Cb1 and the left half of the second receiving portion Cb2, which overlap the detected portion 52 in plan view.
- the magnetic flux ⁇ is generated without being suppressed, and rotates in the clockwise direction. induced electromotive force is generated.
- clockwise rotation at the first receiving portion Cb1 is in the positive direction
- clockwise rotation at the second receiving portion Cb2 is in the negative direction. Therefore, in the first receiving section Cb1, a positive electromotive voltage V+ is generated, whereas in the second receiving section Cb2, a negative electromotive voltage V ⁇ is generated, and the received voltage Vb becomes substantially zero. .
- the detected portion 52 is moved to the "second position P2" where it does not overlap the first receiving portion Cb1 but overlaps the second receiving portion Cb2 in plan view.
- the excitation current Ia increases counterclockwise in plan view
- the increase in the magnetic flux ⁇ is not suppressed in the first receiving portion Cb1
- the increase in the magnetic flux ⁇ increases in the second receiving portion Cb2. Suppressed.
- the detected portion 52 is positioned at the "third position" where the left half of the first receiving portion Cb1 and the right half of the second receiving portion Cb2 overlap in plan view. P3" will be described.
- the increase in the magnetic flux ⁇ is suppressed between the left half of the first receiving portion Cb1 and the right half of the second receiving portion Cb2.
- the magnetic flux ⁇ is generated without being suppressed, and an induced electromotive voltage is generated in the clockwise direction.
- the clockwise rotation in the first receiving section Cb1 is positive, whereas the clockwise rotation in the second receiving section Cb2 is negative, so that the received voltage Vb becomes substantially zero.
- the detected portion 52 is at a "fourth position P4" that overlaps the first receiving portion Cb1 but does not overlap the second receiving portion Cb2 in plan view.
- the excitation current Ia increases counterclockwise in plan view
- the increase in the magnetic flux ⁇ is suppressed in the first receiving portion Cb1
- the increase in the magnetic flux ⁇ increases in the second receiving portion Cb2.
- the first receiving section Cb1 the generation of the electromotive voltage V+ in the positive direction is suppressed
- the electromotive voltage V ⁇ in the negative direction is generated without being suppressed.
- the received voltage Vb becomes negative.
- FIG. 9 is a graph showing the waveform of the exciting current Ia and the waveform of the received voltage Vb.
- the received voltage Vb becomes substantially zero when the excitation current Ia increases.
- the received voltage Vb becomes positive when the excitation current Ia increases.
- the received portion 52 is at the third position P3
- the received voltage Vb becomes substantially zero when the excitation current Ia increases.
- the received portion 52 is at the fourth position P4, the received voltage Vb becomes negative when the excitation current Ia increases.
- the rotation angle detection device 50 detects the rotation angle of the outer rotor 40 based on the received voltage Vb that changes as described above.
- the detected portion 52 is attached to the outer rotor 40 , and the detecting portion 54 is arranged to face the detected portion 52 radially outward of the stator 30 . Therefore, as in the present embodiment, even if there is a shortage of space due to the installation of the inverter 21, the brake pads 25, and the like around the rotating electric machine 29 in the radial direction, the detection unit 54 is located closer to the stator 30 than the stator 30. Since it is installed radially outward, it does not interfere with them.
- the detected portion 52 is integrally formed with the spacer 47, the number of parts can be reduced compared to the case where the detected portion 52 and the spacer 47 are separate bodies. Furthermore, since the detected portions 52 are formed integrally with the spacers 47, the detected portions 52 can be correctly attached at desired positions only by correctly attaching the spacers 47 to the rotor main body 44. FIG. Therefore, mounting errors can be reduced, thereby improving the detection accuracy of the rotation angle detection device 50 . Furthermore, since the detected portion 52 is integrally formed with the spacer 47, the space in the axial direction can be saved compared to the case where the detected portion 52 is provided separately from the spacer 47 on the axial side of the spacer 47. .
- the spacer 47 is interposed between the flange portion 44c and the permanent magnet 46, and the portion to be detected 52 is formed on the surface of the spacer 47 opposite to the permanent magnet 46 side.
- 54 is arranged on the opposite side of the spacer 47 to the permanent magnet 46 side.
- the radially inner surface of the detected portion 52 is arranged radially outward from the radially inner surface of the permanent magnet 46 . Therefore, for example, compared to the case where the radially inner surface of the detected portion 52 is flush with the radially inner surface of the permanent magnet 46, the three-phase coil 37 can reduce the effect of magnetism. Therefore, the detection accuracy of the rotation angle detection device 50 is improved.
- the spacer 47 has good mass balance and the outer rotor has good mass balance in the direction around the axis.
- the detection portion 54 has an annular shape in the direction around the axis, the deviation in the direction around the axis is small. Therefore, the detection accuracy of the rotation angle detection device 50 is improved.
- the outer rotor 40 is of a surface magnet type and the permanent magnets 46 are exposed on the radially inner surface of the outer rotor 40, the amount of effective magnetic flux is large and the torque ripple is small.
- FIG. 10 is an exploded perspective view showing the rotation angle detection device 50 of the second embodiment.
- the detection portion 54 is formed in a semicircular shape. According to this embodiment, by providing the detection unit 54 in a semicircular shape, the installation space for the detection unit 54 can be saved as compared with the case where the detection unit 54 is provided in an annular shape.
- FIG. 11 is a perspective view showing the rotation angle detection device 50 of the third embodiment.
- the detected portion 52 is formed on the radially inner side surface of the spacer 47 in a wave shape protruding radially inward.
- the detecting portion 54 is arranged to face the detected portion 52 on one axial side of the detected portion 52 .
- the detected portion 52 is formed in a wavy shape. Therefore, it is effective when it is difficult to form the detected portion 52 on the spacer 47 in a convex shape.
- FIG. 12 is a perspective view of a partial cross section showing the rotary electric machine 29 and the rotation angle detection device 50 of the fourth embodiment.
- the detecting portion 54 faces the detected portion 52 radially inward of the spacer 47, more specifically, radially inward of the detected portion 52 projecting in one axial direction. are placed.
- the detection section 54 since the detection section 54 is arranged radially inward of the spacer 47 , the space in the axial direction is further reduced compared to the case where the detection section 54 is arranged on one side of the spacer 47 in the axial direction. You can save money.
- FIG. 13 is a perspective view showing the rotation angle detection device 50 of the fifth embodiment.
- the detected portion 52 is formed in the shape of a projection that protrudes radially outward on the radially outward surface of the spacer 47 .
- the detecting portion 54 is provided in an arc shape, and is arranged to face the detected portion 52 on one side in the axial direction from the detected portion 52 projecting radially outward.
- the detected portion 52 in the shape of a protrusion that protrudes radially outward, it is possible to save space in the axial direction compared to the case where the portion is provided in the shape of a protrusion that protrudes in one direction in the axial direction.
- the detection section 54 in an arc shape, the installation space for the detection section 54 can be saved as compared with the case where the detection section 54 is provided in an annular shape.
- FIG. 14 is a perspective view of a partial cross section showing the rotary electric machine 29 and the rotation angle detection device 50 of the sixth embodiment.
- the detected portion 52 is not formed in the spacer 47, and the thickness of the spacer 47 in the axial direction is constant in the direction around the axis.
- a non-magnetic and conductive ring member 49 is attached separately from the spacer 47 to the surface of the rotor yoke 44b on one side in the axial direction, that is, the surface on the open end side of the outer rotor 40 .
- On the surface of the ring member 49 on one side in the axial direction there is provided a non-magnetic and conductive convex portion 52 to be detected that protrudes in one axial direction.
- the detected portion 52 can be provided separately from the spacer 47 . Therefore, it is effective when it is difficult to provide the non-magnetic and conductive portion 52 to be detected in the spacer 47, for example, when it is difficult to make the spacer 47 non-magnetic and conductive.
- the spacer 47 is provided separately from the rotor body 44, as shown in FIG.
- the spacer 47 may be eliminated, and a positioning portion having a shape in which the spacer 47 is integrally formed with the rotor body 44 may be provided.
- the detected portion 52 is formed integrally with the spacer 47 as shown in FIG.
- the detected portion 52 may be separated from the spacer 47 and attached to the spacer 47 .
- the detected portion 52 protrudes radially inward in a wavy shape from the radially inner surface of the spacer 47 .
- the detected portion 52 may protrude in a wavy shape from the surface of the spacer 47 on one side in the axial direction.
- the detected portion 52 protrudes in one axial direction from one axial surface of the spacer 47 .
- the detected portion 52 may protrude axially inward from the axially inner surface of the spacer 47 .
- the detecting portion 54 is disposed facing the detected portion 52 on the radially inner side of the detected portion 52 .
- the detecting portion 54 may be disposed facing the detected portion 52 on the radially outer side of the detected portion 52 .
- the rotor yoke 44b must be non-magnetic and non-conductive, and must not generate eddy currents.
- the detected portion 52 protrudes radially outward from the surface of the spacer 47 on the radially outward side.
- the detected portion 52 may protrude radially inward from the radially inner surface of the spacer 47 .
- the spacer 47 and the detected portion 52 are provided near one side in the axial direction of the outer rotor 40, that is, near the open end.
- the spacer 47 and the detected portion 52 may be provided on the opposite side of the outer rotor 40 from the open end portion, that is, near the bottom portion 44a, and the detecting portion 54 may be arranged to face the detected portion 52.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
回転角検出装置(50)は、軸線回りに回転するアウタロータ(40)と、アウタロータの径方向内方に設けられているステータ(30)と、を有する回転電機(29)に適用される。回転角検出装置は、アウタロータに取り付けられている被検出部(52)と、ステータよりも径方向外方において被検出部に対向配置されており、被検出部の位置を検出する検出部(54)と、を有する。
Description
本出願は、2021年7月21日に出願された日本出願番号2021-120375号に基づくもので、ここにその記載内容を援用する。
本開示は、回転電機のロータの回転角を検出するための回転角検出装置に関する。
特許文献1等に記載のアウタロータ型のモータは、ステータと、ステータの径方向内側に回転可能に設けられている回転軸と、ステータよりも径方向外方において、回転軸と共に回転するアウタロータとを有する。回転軸に被検出部が設けられ、被検出部と対向する位置に、被検出部の位置を検出する検出部が設けられている。
特許文献1等によれば、回転軸に被検出部があるため、回転軸付近に検出部を設置しなければならない。しかしながら、アウタロータ型の回転電機の周辺においては、径方向内方寄りにスペースが不足することが多い。具体的には、例えば、回転電機の中には、インホイールモータとして、タイヤホイールの内側に設置されるものがある。その場合、タイヤホイールの内側の中空空間に、ブレーキやインバータが内蔵されることから、前述の通り、回転電機の周辺において径方向内方寄りにスペースが不足する。そのため、検出部の設置が困難になる。
本開示は、上記事情に鑑みてなされたものであり、アウタロータ型の回転電機に適用される場合において、検出部を設置し易い回転角検出装置を提供することを、主たる目的とする。
本開示の回転角検出装置は、軸線回りに回転するアウタロータと、前記アウタロータの径方向内方に設けられているステータと、を有する回転電機に適用される。前記回転角検出装置は、前記アウタロータに取り付けられている被検出部と、前記ステータよりも径方向外方において前記被検出部に対向配置されており、前記被検出部の位置を検出する検出部と、を有する。
本開示によれば、アウタロータに被検出部が取り付けられており、検出部は、ステータよりも径方向外方において被検出部に対向配置されている。そのため、回転電機の周辺において径方向内方寄りにスペースが不足する場合においても、検出部については、ステータよりも径方向外方に設置されるので、径方向内方寄りのスペース不足と干渉し難い。そのため、回転角検出装置は、アウタロータ型の回転電機に適用される場合においても、検出部を設置し易い。
本開示についての上記目的およびその他の目的、特徴や利点は、添付の図面を参照しながら下記の詳細な記述により、より明確になる。その図面は、
図1は、第1実施形態の回転電機及び回転角検出装置等を示す正面断面図であり、
図2は、回転電機及び回転角検出装置を示す側面図であり、
図3は、回転電機及び回転角検出装置の断面を示す一部断面の斜視図であり、
図4は、回転角検出装置を示す分解斜視図であり、
図5は、被検出部が第1位置の時の検出回路を示す回路図であり、
図6は、被検出部が第2位置の時の検出回路を示す回路図であり、
図7は、被検出部が第3位置の時の検出回路を示す回路図であり、
図8は、被検出部が第4位置の時の検出回路を示す回路図であり、
図9は、励磁電流の波形と受信電圧の波形とを示すグラフであり、
図10は、第2実施形態の回転角検出装置を示す分解斜視図であり、
図11は、第3実施形態の回転角検出装置を示す斜視図であり、
図12は、第4実施形態のモータ及び回転角検出装置を示す一部断面の斜視図であり、
図13は、第5実施形態の回転角検出装置を示す斜視図であり、
図14は、第6実施形態のモータ及び回転角検出装置を示す一部断面の斜視図である。
以下に本開示の実施形態について図面を参照しつつ説明する。ただし、本開示は以下の実施形態に限定されるものではなく、開示の趣旨を逸脱しない範囲で適宜変更して実施できる。
[第1実施形態]
図1は、第1実施形態の回転電機29及び回転角検出装置50を示す正面断面図である。回転角検出装置50は、回転電機29に適用される。回転電機29は、インホイールモータであって、電動車両のタイヤ67のホイール63の内側に設けられている。回転電機29は、タイヤ67及びホイール63と共に軸線回りに回転するアウタロータ40と、アウタロータ40の径方向内方に設けられているステータ30と、を有する。
図1は、第1実施形態の回転電機29及び回転角検出装置50を示す正面断面図である。回転角検出装置50は、回転電機29に適用される。回転電機29は、インホイールモータであって、電動車両のタイヤ67のホイール63の内側に設けられている。回転電機29は、タイヤ67及びホイール63と共に軸線回りに回転するアウタロータ40と、アウタロータ40の径方向内方に設けられているステータ30と、を有する。
図2は、回転電機29を示す側面図であり、具体的には、図1において回転電機29を左方向に見た側面図である。ステータ30は、軸線回りに環状をなすステータヨーク31と、ステータヨーク31から径方向外方に突出する複数本のティース32と、各ティース32に巻回されている3相コイル37とを有する。
図1に示すように、アウタロータ40は、回転軸41とロータ本体44と永久磁石46とスペーサ47とを有する。回転軸41は、ステータヨーク31よりも径方向内方において、軸線上に回転可能に設けられている。ステータヨーク31と回転軸41との間には、ベアリング等の軸受39が設けられている。
ロータ本体44は、回転軸41に取り付けられており、回転軸41と共に回転する。ロータ本体44は、軸線方向一方(図では右方向)に開口する有底筒状であり、筒状のロータヨーク44bと、ロータヨーク44bと回転軸41とを繋ぐ底部44aとを有する。永久磁石46及びスペーサ47は、ロータ本体44に取り付けられており、ロータ本体44と共に回転する。回転電機29の軸線方向一方側に、3相コイル37に3相交流電流を供給するためのインバータ21と、タイヤ67及びホイール63の回転を必要に応じて減速させるためのブレーキパッド25とが設置されている。インバータ21とブレーキパッド25とは、ロータ本体44の内周面よりも径方向内方寄りに、より詳しくは、ステータ30の外周面よりも径方向内方寄りに設置されている。
図3は、回転電機29及び回転角検出装置50を示す一部断面の斜視図である。アウタロータ40は、表面磁石型(SPM:Surface Permanent Magnet)であり、ロータ本体44の径方向内方側の面に永久磁石46が固定される。ロータヨーク44bの軸線方向一方の端部である「ロータ本体44の開口端部」の径方向内方側の面には、径方向内方に突出するフランジ部44cが設けられている。スペーサ47は、軸線回りに環状をなす非磁性体かつ導体の部材であって、フランジ部44cと永久磁石46との間に介装されている。これにより、スペーサ47は、軸線方向において永久磁石46に並ぶように設けられて、軸線方向においてロータ本体44に対する永久磁石46の位置決めをしている。
回転角検出装置50は、スペーサ47に軸線回り方向に略等間隔で設けられているターゲットとしての被検出部52と、被検出部52に対向配置されている検出部54とを有する。被検出部52は、スペーサ47に一体形成されている非磁性体かつ導体の部位である。各被検出部52は、スペーサ47における軸線方向一方の面に、つまり、スペーサ47における永久磁石46側とは反対側の面に、軸線方向一方に突出する凸部状に設けられている。
詳しくは、各被検出部52が軸線方向においてフランジ部44cに係合している。このため、スペーサ47の軸線方向一方側への移動が規制される。また、軸線方向において、スペーサ47の永久磁石46側の面が、各永久磁石46に当接している。このため、各永久磁石46も、スペーサ47を介してフランジ部44cに係合し、軸線方向一方側への移動が規制されることとなる。被検出部52の径方向内方側の面は、永久磁石46の径方向内方側の面よりも径方向外方に配置されている。
図2に示すように、各被検出部52は、軸線回り方向において等間隔で配置されている。径方向における被検出部52の幅は、径方向におけるフランジ部44cの幅よりも大きい。そのため、被検出部52は、フランジ部44cよりも径方向内方に突出して、軸線方向一方側に露出している。
図3に示すように、検出部54は、軸線回りに環状をなす部材であって、被検出部52に対向する形で車体等に固定されている。検出部54は、ステータ30よりも径方向外方に配置されており、かつ、回転電機29の軸線方向一方側においてスペーサ47と対向するように配置されている。それにより、検出部54は、軸線方向において、各被検出部52の露出部分に対向する形で、スペーサ47よりも永久磁石46側とは反対側に配置されている。検出部54の中心は、軸線と同軸なるように配置されている。検出部54の外径は、ロータ本体44の外径よりも若干小さく、検出部54の内径は、スペーサ47の内径と同程度である。
図4は、回転角検出装置50を示す分解斜視図である。前述の通り、スペーサ47及び検出部54は、環状であり、被検出部52は、環状のスペーサ47に凸部状に形成されている。検出部54は、インダクティブセンサであり、軸線回りに略等間隔に複数の検出回路55を有している。
図5は、軸線回りに並設されている検出回路55のうちの1つを示す回路図である。なお、検出回路55の外郭は、実際には、図4に示すように、環状の検出部54に沿って円弧状に設けられているが、図5では、回路の視認性のため、検出回路55の外郭を矩形状に示している。検出回路55は、励磁回路Caと受信回路Cbとを有する。
以下では軸線方向一方に見た平面視を、単に「平面視」という。受信回路Cbは、平面視で∞字状に形成されている。また以下では、平面視において、受信回路Cbの左半分を「第1受信部Cb1」といい、右半分を「第2受信部Cb2」といい、第1受信部Cb1での右回りを「正方向」といい、左回りを「負方向」という。この場合、受信回路Cbが前述の通り∞字状に形成されていることから、第2受信部Cb2については、第1受信部Cb1とは逆に、左回りが「正方向」となり右回りが「負方向」となる。受信回路Cbに対しては、受信回路Cbに発生した誘電起電圧を「受信電圧Vb」として検出するための電圧センサ57が接続されている。
励磁回路Caは、平面視において、∞字状の受信回路Cbを周囲から囲む環状に形成されている。励磁回路Caに対しては、励磁回路Caに交流の「励磁電流Ia」を流すための交流電圧源56が接続されている。
まず、図5に示すように、アウタロータ40の回転角度により、被検出部52が、平面視で第1受信部Cb1の右半分と第2受信部Cb2の左半分とに重なる「第1位置P1」にある場合について説明する。この場合において、平面視で、例えば励磁電流Iaが左回りに増大する時には、励磁回路Caの内側においては紙面手前方向への磁束Φが増大する。このとき、導体である被検出部52には、当該磁束Φの増大を打ち消す方向に渦電流が発生する。そのため、平面視で被検出部52と重なる、第1受信部Cb1の右半分と第2受信部Cb2の左半分とでは、磁束Φの増大が抑制される。
他方、平面視で被検出部52と重ならない、第1受信部Cb1の左半分と第2受信部Cb2の右半分とでは、磁束Φの増大が抑制されずに発生して、右回り方向への誘導起電圧が発生する。しかしながら、前述の通り、第1受信部Cb1での右回りは正方向であるのに対して、第2受信部Cb2での右回りは負方向である。そのため、第1受信部Cb1では、正方向の起電圧V+が発生するのに対して、第2受信部Cb2では、負方向の起電圧V-が発生して、受信電圧Vbが略ゼロになる。
次に、図6に示すように、アウタロータ40の回転角度により、被検出部52が、平面視で第1受信部Cb1と重ならず且つ第2受信部Cb2と重なる「第2位置P2」にある場合について説明する。この場合において、平面視で、励磁電流Iaが左回りに増大する時には、第1受信部Cb1では、磁束Φの増大が抑制されないのに対して、第2受信部Cb2では、磁束Φの増大が抑制される。そのため、第1受信部Cb1では、正方向の起電圧V+が抑制されることなく発生するのに対して、第2受信部Cb2では、負方向の起電圧V-の発生が抑制されて、受信電圧Vbが正になる。
次に、図7に示すように、アウタロータ40の回転角度により、被検出部52が、平面視で第1受信部Cb1の左半分と第2受信部Cb2の右半分とに重なる「第3位置P3」にある場合について説明する。この場合において、平面視で、励磁電流Iaが左回りに増大する時には、第1受信部Cb1の左半分と第2受信部Cb2の右半分とでは、磁束Φの増大が抑制される。他方、第1受信部Cb1の右半分と第2受信部Cb2の左半分とでは、磁束Φの増大が抑制されずに発生して、右回り方向への誘導起電圧が発生する。しかしながら、前述の通り、第1受信部Cb1での右回りは正方向であるのに対して、第2受信部Cb2での右回りは負方向であるため、受信電圧Vbは略ゼロになる。
次に、図8に示すように、アウタロータ40の回転角度により、被検出部52が、平面視で第1受信部Cb1と重なり且つ第2受信部Cb2と重ならない「第4位置P4」にある場合について説明する。この場合において、平面視で、励磁電流Iaが左回りに増大する時には、第1受信部Cb1では、磁束Φの増大が抑制されるのに対して第2受信部Cb2では、磁束Φの増大が抑制されない。そのため、第1受信部Cb1では、正方向の起電圧V+の発生が抑制されるのに対して、第2受信部Cb2では、負方向の起電圧V-が抑制されることなく発生して、受信電圧Vbが負になる。
図9は、励磁電流Iaの波形と受信電圧Vbの波形とを示すグラフである。前述の通り、被検出部52が第1位置P1の時には、励磁電流Iaが増大する時の受信電圧Vbが略ゼロになる。そして、被検出部52が第2位置P2の時には、励磁電流Iaが増大する時の受信電圧Vbが、正になる。そして、被検出部52が第3位置P3の時には、励磁電流Iaが増大する時の受信電圧Vbが略ゼロになる。そして、被検出部52が第4位置P4の時には、励磁電流Iaが増大する時の受信電圧Vbが、負になる。回転角検出装置50は、以上のように変化する受信電圧Vbに基づいて、アウタロータ40の回転角度を検出する。
以下に本実施形態の効果をまとめる。本実施形態によれば、アウタロータ40に被検出部52が取り付けられており、検出部54は、ステータ30よりも径方向外方において、被検出部52に対向配置されている。そのため、本実施形態のように、回転電機29の周辺における径方向内方寄りに、インバータ21やブレーキパッド25等の設置によりスペースが不足する場合においても、検出部54については、ステータ30よりも径方向外方に設置されるので、それらと干渉しない。
さらに、被検出部52は、スペーサ47に一体形成されているため、被検出部52とスペーサ47とが別体の場合に比べて、部品点数を減らすことができる。さらに、被検出部52は、スペーサ47に一体形成されているため、スペーサ47をロータ本体44に正しく取り付けるだけで、各被検出部52を所望の位置に正しく取り付けることができる。そのため、取り付け誤差を低減することができ、それにより回転角検出装置50の検出精度が向上する。さらに、被検出部52は、スペーサ47に一体形成されているため、スペーサ47の軸線方向側にスペーサ47とは別体で被検出部52を設ける場合に比べて、軸線方向にスペースを節約できる。
さらに、軸線方向において、スペーサ47は、フランジ部44cと永久磁石46との間に介装され、被検出部52は、スペーサ47における永久磁石46側とは反対側の面に形成され、検出部54は、スペーサ47よりも永久磁石46側とは反対側に配置されている。それにより、被検出部52をスペーサ47に一体形成すると共に、検出部54をステータ30よりも径方向外方に配置する構成を、シンプルに実現している。
さらに、被検出部52の径方向内方側の面は、永久磁石46の径方向内方側の面よりも径方向外方に配置されている。そのため、例えば、被検出部52の径方向内方側の面が、永久磁石46の径方向内方側の面と面一になっている場合に比べて、被検出部52に対する、3相コイル37が発生させる磁気の影響を低減できる。そのため、回転角検出装置50の検出精度が向上する。
さらに、各被検出部52は、軸線回り方向において等間隔で配置されているため、軸線回り方向において、スペーサ47の質量バランスが良く、アウタロータの質量バランスが良い。また、検出部54は、軸線回り方向に環状をなす形状であるため、軸線回り方向の偏りが小さい。そのため、回転角検出装置50の検出精度が向上する。また、アウタロータ40は、表面磁石型であり、永久磁石46がアウタロータ40の径方向内方側の表面に露出しているため、有効磁束量が大きく、トルクリプルが小さい。
[第2実施形態]
次に第2実施形態について説明する。以下の実施形態においては、それ以前の実施形態のものと同一の又は対応する部材等について同一の符号を付する。以下の実施形態については、第1実施形態をベースにこれと異なる点を中心に説明し、第1実施形態と同一又は類似の部分については、適宜説明を省略する。
次に第2実施形態について説明する。以下の実施形態においては、それ以前の実施形態のものと同一の又は対応する部材等について同一の符号を付する。以下の実施形態については、第1実施形態をベースにこれと異なる点を中心に説明し、第1実施形態と同一又は類似の部分については、適宜説明を省略する。
図10は、第2実施形態の回転角検出装置50を示す分解斜視図である。本実施形態では、検出部54が半円状に形成されている。本実施形態によれば、検出部54を半円状に設けることにより、環状に設ける場合に比べて、検出部54の設置スペースを節約できる。
[第3実施形態]
図11は、第3実施形態の回転角検出装置50を示す斜視図である。本実施形態では、被検出部52が、スペーサ47における径方向内方側の面に、径方向内方に突出する波状に形成されている。検出部54は、被検出部52よりも軸線方向一方側において、被検出部52に対向配置されている。本実施形態によれば、被検出部52を波状に形成する。そのため、スペーサ47に被検出部52を凸部状に形成するのが困難な場合等に有効である。
図11は、第3実施形態の回転角検出装置50を示す斜視図である。本実施形態では、被検出部52が、スペーサ47における径方向内方側の面に、径方向内方に突出する波状に形成されている。検出部54は、被検出部52よりも軸線方向一方側において、被検出部52に対向配置されている。本実施形態によれば、被検出部52を波状に形成する。そのため、スペーサ47に被検出部52を凸部状に形成するのが困難な場合等に有効である。
[第4実施形態]
図12は、第4実施形態の回転電機29及び回転角検出装置50を示す一部断面の斜視図である。本実施形態では、検出部54が、スペーサ47よりも径方向内方、より具体的には、軸線方向一方に突出している被検出部52よりも径方向内方において、被検出部52に対向配置されている。本実施形態によれば、検出部54が、スペーサ47よりも径方向内方に配置されているので、スペーサ47よりも軸線方向一方に配置されている場合に比べて、より軸線方向にスペースを節約できる。
図12は、第4実施形態の回転電機29及び回転角検出装置50を示す一部断面の斜視図である。本実施形態では、検出部54が、スペーサ47よりも径方向内方、より具体的には、軸線方向一方に突出している被検出部52よりも径方向内方において、被検出部52に対向配置されている。本実施形態によれば、検出部54が、スペーサ47よりも径方向内方に配置されているので、スペーサ47よりも軸線方向一方に配置されている場合に比べて、より軸線方向にスペースを節約できる。
[第5実施形態]
図13は、第5実施形態の回転角検出装置50を示す斜視図である。本実施形態では、被検出部52が、スペーサ47における径方向外方側の面に、径方向外方に突出する凸部状に形成されている。検出部54は、円弧状に設けられており、径方向外方に突出する被検出部52よりも軸線方向一方において、被検出部52に対向配置されている。
図13は、第5実施形態の回転角検出装置50を示す斜視図である。本実施形態では、被検出部52が、スペーサ47における径方向外方側の面に、径方向外方に突出する凸部状に形成されている。検出部54は、円弧状に設けられており、径方向外方に突出する被検出部52よりも軸線方向一方において、被検出部52に対向配置されている。
本実施形態によれば、被検出部52を径方向外方に突出する凸部状に設けることにより、軸線方向一方に突出する凸部状に設ける場合に比べて、軸線方向にスペースを節約できる。さらに、検出部54を、円弧状に設けることにより、環状に設ける場合に比べて、検出部54の設置スペースを節約できる。
[第6実施形態]
図14は、第6実施形態の回転電機29及び回転角検出装置50を示す一部断面の斜視図である。本実施形態では、スペーサ47に被検出部52が形成されておらず、スペーサ47の軸線方向の厚さは、軸線回り方向において一定である。ロータヨーク44bにおける軸線方向一方側の面、つまりアウタロータ40の開口端側の面には、スペーサ47とは別体で、非磁性体かつ導体のリング部材49が取り付けられている。そのリング部材49の軸線方向一方側の面に、非磁性体かつ導体の、軸線方向一方に突出する凸部状の被検出部52が設けられている。
図14は、第6実施形態の回転電機29及び回転角検出装置50を示す一部断面の斜視図である。本実施形態では、スペーサ47に被検出部52が形成されておらず、スペーサ47の軸線方向の厚さは、軸線回り方向において一定である。ロータヨーク44bにおける軸線方向一方側の面、つまりアウタロータ40の開口端側の面には、スペーサ47とは別体で、非磁性体かつ導体のリング部材49が取り付けられている。そのリング部材49の軸線方向一方側の面に、非磁性体かつ導体の、軸線方向一方に突出する凸部状の被検出部52が設けられている。
本実施形態によれば、被検出部52をスペーサ47から分離して設けることができる。そのため、例えばスペーサ47を非磁性体かつ導体にするのが困難な場合等、非磁性体かつ導体の被検出部52をスペーサ47に設けるのが困難な場合において有効である。
[他の実施形態]
以上に示した実施形態は、例えば次のように変更してもよい。
以上に示した実施形態は、例えば次のように変更してもよい。
第1~第6実施形態では、図3等に示すように、スペーサ47が、ロータ本体44と別体で設けられている。これに代えて、スペーサ47をなくして、スペーサ47をロータ本体44に一体形成した形状の位置決め部を設けてもよい。
また、第1~第6実施形態では、図3等に示すように、被検出部52はスペーサ47に一体形成されている。これに代えて、被検出部52をスペーサ47と別体にして、被検出部52をスペーサ47に取り付けてもよい。
図11に示す第3実施形態では、被検出部52が、スペーサ47の径方向内方側の面から径方向内方に波状に突出している。これに代えて、被検出部52が、スペーサ47の軸線方向一方側の面から軸線方向一方に波状に突出するようにしてもよい。
図12に示す第4実施形態では、被検出部52が、スペーサ47の軸線方向一方の面から軸線方向一方に突出している。これに代えて、被検出部52が、スペーサ47の軸線方向内方側の面から軸線方向内方に突出するようにしてもよい。
また、第4実施形態では、検出部54が被検出部52よりも径方向内方側において、被検出部52に対向配置されている。これに代えて、検出部54を、被検出部52よりも径方向外方側において、被検出部52に対向配置してもよい。ただし、この場合、ロータヨーク44bは、非磁性体かつ非導電体であり、渦電流が発生しないものである必要がある。
図13に示す第5実施形態では、被検出部52が、スペーサ47の径方向外方側の面から、径方向外方に突出している。これに代えて、被検出部52を、スペーサ47の径方向内方側の面から、径方向内方に突出するようにしてもよい。
第1~第6実施形態では、図1等に示すように、スペーサ47及び被検出部52が、アウタロータ40における軸線方向一方寄りに、つまり開口端部寄りに設けられている。これに代えて、スペーサ47及び被検出部52を、アウタロータ40における開口端部寄りとは反対側、つまり底部44a寄りに設け、当該被検出部52に検出部54を対向配置させてもよい。
なお、以上に示した各実施形態は、それらの一部ずつの構成を、相容れない場合を除き、任意に組み合わせて実施することもできる。
本開示は、実施例に準拠して記述されたが、本開示は当該実施例や構造に限定されるものではないと理解される。本開示は、様々な変形例や均等範囲内の変形をも包含する。加えて、様々な組み合わせや形態、さらには、それらに一要素のみ、それ以上、あるいはそれ以下、を含む他の組み合わせや形態をも、本開示の範疇や思想範囲に入るものである。
Claims (10)
- 軸線回りに回転するアウタロータ(40)と、前記アウタロータの径方向内方に設けられているステータ(30)と、を有する回転電機(29)に適用される回転角検出装置(50)において、
前記アウタロータに取り付けられている被検出部(52)と、
前記ステータよりも径方向外方において前記被検出部に対向配置されており、前記被検出部の位置を検出する検出部(54)と、を有する回転角検出装置。 - 前記アウタロータは、前記軸線回りに回転可能に設けられているロータ本体(44)と、前記ロータ本体に取り付けられている永久磁石(46)と、軸線方向において前記永久磁石に並ぶように設けられており、軸線方向において前記ロータ本体に対する前記永久磁石の位置決めをしている位置決め部(47)と、を有し、
前記被検出部(52)は、前記位置決め部に設けられている、請求項1に記載の回転角検出装置。 - 前記位置決め部は、前記ロータ本体と別体のスペーサ(47)であり、前記被検出部は、前記スペーサに一体形成されている、請求項2に記載の回転角検出装置。
- 前記ロータ本体は、軸線方向の一方に開口する有底筒状であり、前記永久磁石は、前記ロータ本体の径方向内方側の面に固定されており、
前記スペーサは、前記ロータ本体の開口端部の径方向内方側の面に設けられたフランジ部(44c)と前記永久磁石との間に介装されている、請求項3に記載の回転角検出装置。 - 前記被検出部は、軸線方向において、前記スペーサにおける前記永久磁石側とは反対側の面に形成されており、前記検出部は、軸線方向において、前記スペーサよりも前記永久磁石側とは反対側に配置されている、請求項4に記載の回転角検出装置。
- 前記検出部は、前記スペーサよりも径方向内方に配置されている、請求項4に記載の回転角検出装置。
- 前記位置決め部は、前記ロータ本体に一体形成されている、請求項2に記載の回転角検出装置。
- 前記被検出部は、前記位置決め部と別体であり、前記位置決め部に取り付けられている、請求項2に記載の回転角検出装置。
- 前記被検出部の径方向内方側の面は、前記永久磁石の径方向内方側の面よりも径方向外方に配置されている請求項2~8のいずれか1項に記載の回転角検出装置。
- 前記検出部(54)は、インダクティブセンサである、請求項1~9のいずれか1項に記載の回転角検出装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202280051187.0A CN117677824A (zh) | 2021-07-21 | 2022-06-23 | 旋转角检测装置 |
| US18/418,572 US20240159510A1 (en) | 2021-07-21 | 2024-01-22 | Rotational angle measurement apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-120375 | 2021-07-21 | ||
| JP2021120375A JP2023016210A (ja) | 2021-07-21 | 2021-07-21 | 回転角検出装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/418,572 Continuation US20240159510A1 (en) | 2021-07-21 | 2024-01-22 | Rotational angle measurement apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023002799A1 true WO2023002799A1 (ja) | 2023-01-26 |
Family
ID=84979986
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/025103 WO2023002799A1 (ja) | 2021-07-21 | 2022-06-23 | 回転角検出装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20240159510A1 (ja) |
| JP (1) | JP2023016210A (ja) |
| CN (1) | CN117677824A (ja) |
| WO (1) | WO2023002799A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20240266933A1 (en) * | 2023-02-02 | 2024-08-08 | Ford Global Technologies, Llc | Rotor for synchronous electric machine |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002272079A (ja) * | 2001-03-13 | 2002-09-20 | Honda Motor Co Ltd | アウターロータ型ブラシレスモータの構造 |
| JP2020129951A (ja) * | 2019-02-12 | 2020-08-27 | 日本精工株式会社 | 電動機およびその製造方法 |
-
2021
- 2021-07-21 JP JP2021120375A patent/JP2023016210A/ja active Pending
-
2022
- 2022-06-23 WO PCT/JP2022/025103 patent/WO2023002799A1/ja active Application Filing
- 2022-06-23 CN CN202280051187.0A patent/CN117677824A/zh active Pending
-
2024
- 2024-01-22 US US18/418,572 patent/US20240159510A1/en active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002272079A (ja) * | 2001-03-13 | 2002-09-20 | Honda Motor Co Ltd | アウターロータ型ブラシレスモータの構造 |
| JP2020129951A (ja) * | 2019-02-12 | 2020-08-27 | 日本精工株式会社 | 電動機およびその製造方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023016210A (ja) | 2023-02-02 |
| US20240159510A1 (en) | 2024-05-16 |
| CN117677824A (zh) | 2024-03-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6128419B2 (ja) | 回転電機 | |
| JP5007581B2 (ja) | モータ | |
| US20130015748A1 (en) | Motor | |
| WO2018180038A1 (ja) | モータ及び電動パワーステアリング装置 | |
| US11342826B2 (en) | Rotating electric machine | |
| EP3101787B1 (en) | Resolver device, motor, and actuator | |
| JP4296486B2 (ja) | 可変リラクタンス型レゾルバ | |
| WO2023002799A1 (ja) | 回転角検出装置 | |
| JP2014033588A (ja) | レゾルバ、モータ及びステータ | |
| JP2008199746A (ja) | 電動駆動装置 | |
| JP5630206B2 (ja) | 回転位置検出用ロータ固定構造 | |
| JP2012157180A (ja) | レゾルバ内蔵型回転機 | |
| CN112703661B (zh) | 旋转电机 | |
| JP5353928B2 (ja) | 埋込磁石形回転電機 | |
| JP5541080B2 (ja) | レゾルバロータ固定構造 | |
| US20180226862A1 (en) | Rotational position detection device and motor device | |
| JP6265824B2 (ja) | モータジェネレータ | |
| CN117501072A (zh) | 旋转检测器 | |
| JP2022112231A (ja) | ステッピングモータ | |
| WO2020008516A1 (ja) | レゾルバ装置およびレゾルバ装置付回転電機 | |
| JP6088465B2 (ja) | 駆動ユニット | |
| JPS60257754A (ja) | 磁石回転型電動機 | |
| US20220085670A1 (en) | Motor | |
| JP7573140B1 (ja) | レゾルバステータ及びレゾルバ | |
| JP6046515B2 (ja) | ロータ、及びモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22845735 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202280051187.0 Country of ref document: CN |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 22845735 Country of ref document: EP Kind code of ref document: A1 |