WO2022270265A1 - アライナ装置 - Google Patents
アライナ装置 Download PDFInfo
- Publication number
- WO2022270265A1 WO2022270265A1 PCT/JP2022/022447 JP2022022447W WO2022270265A1 WO 2022270265 A1 WO2022270265 A1 WO 2022270265A1 JP 2022022447 W JP2022022447 W JP 2022022447W WO 2022270265 A1 WO2022270265 A1 WO 2022270265A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- wafer
- aligner
- light
- sensor
- edge
- Prior art date
Links
- 230000007547 defect Effects 0.000 claims abstract description 59
- 238000001514 detection method Methods 0.000 claims description 13
- 238000004891 communication Methods 0.000 claims description 12
- 230000001678 irradiating effect Effects 0.000 claims description 4
- 238000000034 method Methods 0.000 abstract description 11
- 235000012431 wafers Nutrition 0.000 description 168
- 238000007689 inspection Methods 0.000 description 14
- 238000012545 processing Methods 0.000 description 7
- 239000002245 particle Substances 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- 239000010419 fine particle Substances 0.000 description 2
- 238000012937 correction Methods 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000011859 microparticle Substances 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images



Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
- H01L21/681—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment using optical controlling means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1692—Calibration of manipulator
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67288—Monitoring of warpage, curvature, damage, defects or the like
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L23/00—Details of semiconductor or other solid state devices
- H01L23/544—Marks applied to semiconductor devices or parts, e.g. registration marks, alignment structures, wafer maps
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2223/00—Details relating to semiconductor or other solid state devices covered by the group H01L23/00
- H01L2223/544—Marks applied to semiconductor devices or parts
- H01L2223/54433—Marks applied to semiconductor devices or parts containing identification or tracking information
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2223/00—Details relating to semiconductor or other solid state devices covered by the group H01L23/00
- H01L2223/544—Marks applied to semiconductor devices or parts
- H01L2223/54493—Peripheral marks on wafers, e.g. orientation flats, notches, lot number
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Manufacturing & Machinery (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
Abstract
アライナ装置1は、モータ12と、回転装置11と、制御装置13と、センサ14と、を備える。モータ12は、回転駆動力を発生させる。回転装置11は、モータ12が発生させた回転駆動力により、ウエハ30を支持した状態で回転する。制御装置13は、回転装置11の回転を制御して、ウエハ30の回転位相を予め定めた値に合わせる処理を行う。センサ14は、進行方向が異なる複数の光をウエハ30のエッジに向けて照射し、光を受信することにより、ウエハ30のエッジの欠陥を検出する。
Description
本出願は、主として、ウエハの欠陥を検出するセンサを備えるアライナ装置に関する。
特許文献1(特開2002-299419号公報)は、マルチファンクションウエハアライナを開示する。マルチファンクションウエハアライナは、ウエハのセンタリング補正、ウエハのアライメント、及びウエハの損傷の検出を行う。マルチファンクションウエハアライナは、発光センサ及び受光センサを用いてウエハの損傷の検出を行う。発光センサは、ウエハの下側に並べて配置されており、上方に向けて光を照射する。受光センサは、ウエハの側面に対向する位置に並べて配置されており、発光センサが照射した光がウエハで反射した光を受光する。ウエハに欠陥が生じている箇所は凹み等が生じているため、光の反射方向が異なる。これにより、受光センサが光を受光した位置に基づいてウエハの欠陥を検出できる。
特許文献2(国際公開第2019/165484号)は、ウエハを検査する装置を開示する。この装置は、ウエハを挟むように発光部と検出部とが配置されている。発光部は、ウエハのエッジに向けて複数の位置からレーザ光を照射する。検出部は、レーザ光がウエハのエッジで反射又は散乱した光を受光する。検出部の検出結果に基づいて、ウエハの欠陥を高精度に検出できる。
特許文献1のマルチファンクションウエハアライナでは、ウエハに大きな凹み等が生じていないと、ウエハの欠陥を検出することができない。更に、特許文献1のマルチファンクションウエハアライナでは、ウエハの表面に対して垂直に光を照射するため、ウエハの表面の微粒子を検出することは困難である。特許文献2の装置はウエハの検査のみを行うため、特許文献2の装置で検査されたウエハを再びアライナ装置まで搬送する必要がある。そのため、ウエハの処理に掛かる時間が長くなる。
本出願は以上の事情に鑑みてされたものであり、その主要な目的は、ウエハの欠陥を高精度に検出するとともに、ウエハの検査及びアライメントに掛かる時間を短くすることが可能なアライナ装置を提供することにある。
本出願の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
本出願の観点によれば、以下の構成のアライナ装置が提供される。即ち、アライナ装置は、モータと、回転装置と、制御装置と、センサと、を備える。前記モータは、回転駆動力を発生させる。前記回転装置は、前記モータが発生させた回転駆動力により、ウエハを支持した状態で回転する。前記制御装置は、前記回転装置の回転を制御して、前記ウエハの回転位相を予め定めた値に合わせる処理を行う。前記センサは、進行方向が異なる複数の光を前記ウエハのエッジに向けて照射し、当該光を受信することにより、前記ウエハのエッジの欠陥を検出する。
上記の方法でウエハのエッジの欠陥を検出することにより、ウエハの複数の位置に対して検査を行うことができるので、ウエハの欠陥を高精度に検出することができる。更に、アライナ装置がアライメントだけでなくウエハの欠陥を検出することにより、ウエハの検査及びアライメントに掛かる時間を短くすることができる。
本出願によれば、ウエハの欠陥を高精度に検出するとともに、ウエハの検査及びアライメントに掛かる時間を短くすることができる。
次に、図面を参照して本出願の実施形態を説明する。図1は、第1実施形態のアライナ装置1の斜視図である。
図1に示すアライナ装置1は、クリーンルーム等の作業空間に配置される。アライナ装置1には、図略のロボットによってウエハ30が搬送される。
ロボットは、例えば、SCARA(スカラ)型の水平多関節ロボットである。SCARAは、Selective Compliance Assembly Robot Armの略称である。ウエハ30は、円形の薄い板状の半導体ウエハである。ウエハ30は、半導体ウエハに代えてガラスウエハであってもよい。
アライナ装置1は、ウエハ30に対してアライメントを行う装置である。アライメントとは、ウエハ30の回転位相を取得して、ウエハ30の回転位相を予め定めた値に合わせる処理である。ウエハ30の回転位相とは、ウエハ30の回転に伴って変化するウエハ30の向きである。
以下の説明では、円板状のウエハ30のうち円形の2つの面を主面31と記載し、主面31同士を接続する面を側面32と記載する。また、ウエハ30の主面31の径方向の端部及び側面32を合わせて、ウエハ30のエッジと記載する。
ウエハ30のエッジには、ノッチ33が形成されている。ノッチ33は、半導体の結晶方位を示す。ノッチ33に代えてオリエンテーションフラットがウエハ30に形成されている場合、アライナ装置1はオリエンテーションフラットを検出する構成であってもよい。また、アライナ装置1は、ウエハ30の回転位相に加えて、基準点に対するウエハ30の中心位置のズレを取得する構成であってもよい。
アライナ装置1は、回転装置11と、モータ12と、制御装置13と、センサ14と、通信装置16と、を備える。
回転装置11は、円板状の回転台である。回転装置11には、ロボットによってウエハ30が載せられる。ウエハ30が載せられることにより、回転装置11は、ウエハ30を支持する。ウエハ30が載せられる面は、鉛直方向を向いている。回転装置11は、作業台等に回転可能に支持されている。回転装置11の形状は円板に限られない。例えば、回転装置11は矩形の板状であってもよい。また、回転装置11は、ウエハ30の側面を把持してウエハ30を支持する構成であってもよい。
モータ12は、回転駆動力を発生させる。モータ12が発生させた回転駆動力は回転装置11に伝達される。これにより、回転装置11は、鉛直方向を回転中心として回転する。その結果、ウエハ30の回転位相を変更することができる。
モータ12は、制御装置13によって制御されている。制御装置13は、CPU等の演算装置と、HDD、SSD、又はフラッシュメモリ等の記憶装置と、を備える。演算装置は、記憶装置に記憶されたプログラムを実行することにより、アライナ装置1を制御する。制御装置13は、ロボットとアライナ装置1の両方を制御してもよいし、アライナ装置1のみを制御してもよい。
回転装置11には、図略のエンコーダが設けられている。エンコーダの検出結果は制御装置13へ送信される。これにより、制御装置13は、回転装置11の回転位相(即ち、ウエハ30の回転位相)を把握することができる。
センサ14は、回転装置11に載せられたウエハ30を検査する。センサ14は、ハウジング21と、投光部22と、受光部23と、を備える。
ハウジング21は、センサ14を構成する部材が収容される箱状の部材である。ハウジング21は、略U字状であり、間隔を空けて対向する第1部分21a及び第2部分21bを有する。第1部分21a及び第2部分21bの間には、検査空間21cが形成されている。回転装置11に支持されるウエハ30のエッジは、検査空間21cを通る。これにより、回転装置11を1回転させることにより、全周にわたってウエハ30のエッジを検査することができる。
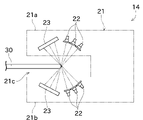
図2に示すように、第1部分21aには、複数の投光部22(具体的には3つの投光部22)と、受光部23と、が配置されている。同様に、第2部分21bには、複数の投光部22(具体的には3つの投光部22)と、受光部23と、が配置されている。
投光部22は、レーザ発生器、レーザダイオード、又はSLD(スーパールミネッセントダイオード)等である。従って、投光部22が照射する光(レーザ光)は、指向性があり、かつ、LEDが照射する光と比較してスペクトル幅が狭い。それぞれの投光部22は、ウエハ30のエッジに向けて光を照射する。投光部22が照射する光の光軸は、ウエハ30に接する。複数の投光部22の位置は異なるので、それぞれの投光部22が照射する光の進行方向は異なる。更に、光の光軸とウエハ30の接点の位置は、投光部22に応じて異なる。
受光部23は、投光部22が照射した光を受光して、受光した光の光量に応じた電流信号(又はそれを変換した電圧信号)を生成して制御装置13へ出力する。第1部分21aに配置された投光部22の光は、第2部分21bに配置された受光部23で受光される。同様に、第2部分21bに配置された投光部22の光は、第1部分21aに配置された受光部23で受光される。
制御装置13は、受光部23から入力された電流信号が、何れの投光部22が照射した光に起因するかを区別可能である。具体的には、受光部23は複数のフォトダイオードを含んでおり、それぞれのフォトダイオードは、投光部22の光の進行方向と重なる位置に配置されている。これにより、電流信号を出力したフォトダイオードに応じて、何れの投光部22が照射した光に起因する電流信号かを特定できる。あるいは、受光部23を構成するフォトダイオードは1つであってもよい。この場合、予め定められたスケジュールで投光部22が光を照射して当該光を受光部23が受光する。そして、制御装置13は、電流信号が入力された時刻とスケジュールとに基づいて、何れの投光部22が照射した光に起因する電流信号かを特定できる。
投光部22が照射した光は、ウエハ30のエッジの表面の影響を受けた後に(例えば表面で回折された後に)受光部23で受光される。従って、ウエハ30のエッジの表面に欠陥が存在している場合、受光部23が受光する光が変化する。制御装置13は、受光部23から入力された電流信号に基づいて、ウエハ30のエッジの表面に欠陥が存在しているか否かを特定できる。上述したように、投光部22が照射した光の光軸とウエハ30の接点の位置は、投光部22に応じて異なる。従って、本実施形態では、ウエハ30のエッジの複数箇所に対して欠陥を検査できる。
センサ14が検出可能な欠陥は様々である。センサ14は、例えば、ウエハ30が反っていること、側面32に凹凸があって形状が不適切であること、微粒子の量が所定値より多いこと、ウエハの直径が不適切であること、接合された複数のウエハの同心度が不適切であること(接合ウエハの場合)を検出できる。特に、特許文献1のようにウエハ表面に垂直に光を照射する場合はウエハに存在する微粒子を検出することは困難であるが、本実施形態のようにウエハ30の表面に対して傾斜して光を照射することにより、ウエハ30に存在する微粒子を検出可能である。また、ウエハ30の側面32の形状が不適切であったり、側面32に存在する微粒子の量が所定値より多い場合、ウエハ30の主面31にも同様の欠陥が生じている可能性がある。従って、制御装置13は、ウエハ30の側面32にこの種の欠陥がある場合、ウエハ30の主面31にも同種の欠陥がある可能性が高いと判定する。
また、ウエハ30の欠陥ではないが、センサ14は、検査空間21cにあるウエハ30にノッチ33又はオリエンテーションフラットが形成されているかについても検出できる。ノッチ33及びオリエンテーションフラットは、予め形状が定められている。更に、ノッチ33及びオリエンテーションフラットは、一般的な欠陥とは形状及び大きさが全く異なる。従って、ノッチ33及びオリエンテーションフラットが存在する場合に受光部23が出力する電流信号を予め制御装置13に記憶させておく(学習させておく)ことにより、ウエハ30に欠陥が存在しているのか、ウエハ30にノッチ33又はオリエンテーションフラットが存在しているのかを区別することができる。これにより、制御装置13は、ウエハ30の欠陥の検査とアライメントを同時に行うことができる。
通信装置16は、制御装置13に接続されるか、制御装置13に内蔵されている。通信装置16は、外部装置40と通信可能である。外部装置40は、アライナ装置1の上位の装置であり、アライナ装置1及び他のウエハ処理装置をまとめて制御する装置である。通信装置16は例えば通信モジュールであり、有線通信用のコネクタ又は無線通信用のアンテナ等を含んでいる。
次に、図3を参照して、ウエハ30の欠陥の検査とアライメントに関して制御装置13が行う制御について説明する。
初めに、制御装置13は、回転装置11にウエハ30が載置されたか否かを判定する(S101)。この判定は、例えば、制御装置13がロボットを制御して、ウエハ30を載置する作業が完了したか否かに基づいて行われる。なお、制御装置13とは別の制御装置がロボットを制御する場合、制御装置13は、ロボットの制御装置からウエハ30を回転装置11に置く作業が完了したことの通知を受信してもよい。
次に、制御装置13は、モータ12を制御して回転装置11を回転させることにより、ウエハ30を1回転させる(S102)。更に、制御装置13は、センサ14を用いてウエハ30のエッジの欠陥とノッチ33を検出する(S102)。ウエハ30を1回転させながらウエハ30のエッジをセンサ14で計測することにより、ウエハ30の欠陥を全周にわたって検査することができる。また、本実施形態のセンサ14はエッジの欠陥とノッチ33の検出処理を同時に行うため、ウエハ30の検査及びアライメントに掛かる時間を短くすることができる。
ノッチ33が検出された場合、制御装置13は、ノッチ33が検出された時のエンコーダの検出値に基づいて、ノッチ33の位置を記録する(S103)。ノッチ33の位置は、ノッチ33が検出されたときのウエハ30(回転装置11)の回転位相として記録される。
次に、制御装置13は、ステップS102で行ったウエハ30の欠陥の検出結果を通信装置16を介して外部装置40へ送信する(S104)。ウエハ30の欠陥の検出結果は、ウエハ30の識別情報と関連付けて送信される。なお、ウエハ30の欠陥の検出結果が製品として問題ないレベルか否かの判定は外部装置40が行う。外部装置40が問題ないと判定した場合にアライナ装置1(制御装置13)がアライメントを継続して行ってもよいし、アライナ装置1(制御装置13)が1又は複数枚のウエハ30のアライメントを完了した後に、外部装置40がウエハ30の欠陥に対する判定を行ってもよい
次に、制御装置13は、ウエハ30の回転位相を調整して、ウエハ30の回転位相を予め定めた値に合わせる(S105)。即ち、制御装置13は、ステップS103で記録したノッチの位置が、予め定めた方向を向くように、モータ12を制御してウエハ30を回転させる。
以上により、アライメントとウエハ30の検査を同じ装置で行うことができる。これにより、アライメントとウエハ30の検査を別の装置で行う場合と比較して、ウエハ30の処理に掛かる時間を短くすることができる。特に、センサ14は、進行方向が異なる複数の光をウエハ30に向けて照射してウエハ30の欠陥を検出する構成なので、ウエハ30の様々な欠陥を的確に検出できる。
次に、図4を参照して、第2実施形態について説明する。
第1実施形態では、ウエハ30の欠陥を検出するセンサと、ウエハ30のノッチ33を検出するセンサと、が同一である。これに代えて、第2実施形態では、ウエハ30の欠陥を検出するセンサと、ウエハ30のノッチ33を検出するセンサと、が別である。具体的には、第1実施形態と同等のセンサ14を用いてウエハ30の欠陥を検出し、ラインセンサ15を用いてウエハ30のノッチ33を検出する。
ラインセンサ15は、透過型の光量計測センサである。ラインセンサ15は、投光部15aと受光部15bとを備える。
投光部15aは、受光部15bに向けて光を照射する。投光部15aが照射する光は、断面がライン状である。投光部15aと受光部15bの間にはウエハ30が配置される。
受光部15bは、投光部15aが照射した光のうちウエハ30で遮られなかった光を受光する。受光部15bは、受光した光の光量に応じた電流信号(又はそれを変換した電圧信号)を生成して制御装置13へ出力する。投光部15aと受光部15bの間にノッチ33が存在する場合、ウエハ30で遮られる光が少なくなるので、受光部15bが出力する電流信号の値が大きくなる。従って、ノッチ33は、受光部15bの出力値に基づいてノッチ33の位置(回転位相)を特定できる。なお、ウエハ30の中心位置がズレている場合は、ウエハ30の回転に伴って受光部15bが出力する電流信号の値が常に変化するため、制御装置13は、ウエハ30の中心位置がズレていることを検出できる。
第2実施形態では、センサ14が行っていた2つの機能を2つのセンサに分配した構成である。これにより、センサ14の機能又は設定をウエハ30の欠陥の検出に特化させることができる。その結果、ウエハ30の欠陥の検出精度を更に向上させることができる可能性がある。なお、ウエハ30の欠陥の検出及びアライメントに関する制御は、第1実施形態と同じである。
以上に説明したように、本実施形態のアライナ装置1は、モータ12と、回転装置11と、制御装置13と、センサ14と、を備える。モータ12は、回転駆動力を発生させる。回転装置11は、モータ12が発生させた回転駆動力により、ウエハ30を支持した状態で回転する。制御装置13は、回転装置11の回転を制御して、ウエハ30の回転位相を予め定めた値に合わせる処理を行う。センサ14は、進行方向が異なる複数の光をウエハ30のエッジに向けて照射し、光を受信することにより、ウエハ30のエッジの欠陥を検出する。
この方法でウエハ30のエッジの欠陥を検出することにより、ウエハ30の複数の位置に対して検査を行うことができるので、ウエハ30の欠陥を高精度に検出することができる。更に、アライナ装置1がアライメントだけでなくウエハ30の欠陥を検出することにより、ウエハ30の検査及びアライメントに掛かる時間を短くすることができる。
本実施形態のアライナ装置1において、制御装置13は、ウエハ30の回転位相を予め定めた値に合わせる前に、ウエハ30を少なくとも1回転させる。センサ14は、制御装置13がウエハ30を1回転する間において、ウエハ30のエッジの欠陥を検出し続ける。
これにより、ウエハ30の検査及びアライメントを効率的に行うことができる。また、ウエハ30を全周にわたって検査できる。
本実施形態のアライナ装置1において、制御装置13は、ウエハ30に形成されたオリエンテーションフラット又はノッチ33に基づいてウエハ30の回転位相を予め定めた値に合わせる。オリエンテーションフラット又はノッチ33は、センサ14を用いて検出される。
これにより、センサ数を減らすことができるので、アライナ装置のコストを低減できる。
本実施形態のアライナ装置1は、外部装置40と通信する通信装置16を備える。通信装置16は、ウエハ30のエッジの欠陥の検出結果を、ウエハ30の識別情報と関連付けて、外部装置40に送信する。
これにより、外部装置40は、ウエハ30の欠陥の検出結果が製品として問題ないレベルか否かの判定を行うことができる。
本実施形態のアライナ装置1において、センサ14は、ウエハ30の主面31の欠陥を検出せずにウエハ30の側面32の欠陥を検出する。制御装置13は、ウエハ30の側面32の欠陥に基づいて、ウエハ30の主面31の欠陥を判定する。
これにより、ウエハ30の主面31の全体を検査する構成と比較して、検査時間を短くすることができる。また、ウエハ30の主面31に所定値より多い微粒子が堆積する場合は、ウエハ30のエッジにも所定値より多い微粒子が堆積する可能性が高いので、十分な検査精度を発揮できる。
以上に本出願の好適な実施の形態を説明したが、上記の構成は例えば以下のように変更することができる。
上記実施形態では、投光部22が照射してウエハ30の表面を受けた光を受光部23が受光する。これに代えて、投光部22が照射してウエハ30の表面で反射した光を受光部23が受光する構成であってもよい。
上記実施形態では、第1部分21aに投光部22及び受光部23が配置され、第2部分21bに投光部22及び受光部23が配置される。これに代えて、第1部分21aに投光部22が配置され、第2部分21bに受光部23が配置される構成(又はその逆の構成)であってもよい。
上記実施形態で示したフローチャートは一例であり、一部の処理を省略したり、一部の処理の内容を変更したり、新たな処理を追加したりしてもよい。例えば、上記実施形態ではウエハ30の欠陥とノッチ33を検出する処理を同時に行う。これに代えて、初めにウエハ30の欠陥を検出する処理を行って、その後にウエハ30のノッチ33を検出する処理を行ってもよい。また、ステップS104の処理とステップS105の処理の順序を入れ替えてもよい。
本明細書で開示する要素の機能は、開示された機能を実行するように構成又はプログラムされた汎用プロセッサ、専用プロセッサ、集積回路、ASIC(Application Specific Integrated Circuits)、従来の回路、及び/又は、それらの組み合わせ、を含む回路又は処理回路を使用して実行できる。プロセッサは、トランジスタやその他の回路を含むため、処理回路又は回路と見なされる。本開示において、回路、ユニット、又は手段は、列挙された機能を実行するハードウェアであるか、又は、列挙された機能を実行するようにプログラムされたハードウェアである。ハードウェアは、本明細書に開示されているハードウェアであっても良いし、あるいは、列挙された機能を実行するようにプログラム又は構成されているその他の既知のハードウェアであっても良い。ハードウェアが回路の一種と考えられるプロセッサである場合、回路、手段、又はユニットはハードウェアとソフトウェアの組み合わせであり、ソフトウェアはハードウェア及び/又はプロセッサの構成に使用される。
Claims (5)
- 回転駆動力を発生させるモータと、
前記モータが発生させた回転駆動力により、ウエハを支持した状態で回転する回転装置と、
前記回転装置の回転を制御して、前記ウエハの回転位相を予め定めた値に合わせる処理を行う制御装置と、
進行方向が異なる複数の光を前記ウエハのエッジに向けて照射し、当該光を受信することにより、前記ウエハのエッジの欠陥を検出するセンサと、
を備えることを特徴とするアライナ装置。 - 請求項1に記載のアライナ装置であって、
前記制御装置は、前記ウエハの回転位相を予め定めた値に合わせる前に、前記ウエハを少なくとも1回転させ、
前記センサは、前記制御装置がウエハを1回転する間において、前記ウエハのエッジの欠陥を検出し続けることを特徴とするアライナ装置。 - 請求項2に記載のアライナ装置であって、
前記制御装置は、前記ウエハに形成されたオリエンテーションフラット又はノッチに基づいて前記ウエハの回転位相を予め定めた値に合わせ、
前記オリエンテーションフラット又は前記ノッチは、前記センサを用いて検出されることを特徴とするアライナ装置。 - 請求項1から3までの何れか一項に記載のアライナ装置であって、
外部装置と通信する通信装置を備え、
前記通信装置は、前記ウエハのエッジの欠陥の検出結果を、前記ウエハの識別情報と関連付けて、前記外部装置に送信することを特徴とするアライナ装置。 - 請求項1から4までの何れか一項に記載のアライナ装置であって、
前記センサは、前記ウエハの主面の欠陥を検出せずに前記ウエハの側面の欠陥を検出し、
前記制御装置は、前記ウエハの側面の欠陥に基づいて、前記ウエハの主面の欠陥を判定することを特徴とするアライナ装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020247002815A KR20240041918A (ko) | 2021-06-24 | 2022-06-02 | 얼라이너 장치 |
| CN202280043607.0A CN117795656A (zh) | 2021-06-24 | 2022-06-02 | 对准装置 |
| JP2023529770A JPWO2022270265A1 (ja) | 2021-06-24 | 2022-06-02 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/357,354 US20220415690A1 (en) | 2021-06-24 | 2021-06-24 | Aligner apparatus |
| US17/357,354 | 2021-06-24 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022270265A1 true WO2022270265A1 (ja) | 2022-12-29 |
Family
ID=84541233
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/022447 WO2022270265A1 (ja) | 2021-06-24 | 2022-06-02 | アライナ装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20220415690A1 (ja) |
| JP (1) | JPWO2022270265A1 (ja) |
| KR (1) | KR20240041918A (ja) |
| CN (1) | CN117795656A (ja) |
| TW (1) | TW202312339A (ja) |
| WO (1) | WO2022270265A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006128423A (ja) * | 2004-10-29 | 2006-05-18 | Fujitsu Ltd | 半導体製造装置 |
| JP2008064595A (ja) * | 2006-09-07 | 2008-03-21 | Olympus Corp | 基板検査装置 |
| JP2009016438A (ja) * | 2007-07-02 | 2009-01-22 | Nitto Denko Corp | 半導体ウエハへの粘着テープ貼付け方法および保護テープの剥離方法 |
| JP2015195328A (ja) * | 2014-03-28 | 2015-11-05 | 株式会社ダイヘン | ワーク処理装置、ワーク搬送システム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3074313B2 (ja) * | 1993-01-26 | 2000-08-07 | 株式会社メックス | ウエハーの位置決め装置 |
| KR100389129B1 (ko) | 2001-03-06 | 2003-06-25 | 삼성전자주식회사 | 멀티 펑션 웨이퍼 얼라이너 |
| US9886029B2 (en) * | 2013-12-02 | 2018-02-06 | Daihen Corporation | Workpiece processing apparatus and workpiece transfer system |
| AT520964B1 (de) | 2018-02-28 | 2019-11-15 | Tatiana Strapacova | Vorrichtung und Verfahren zur optischen Erfassung eines Randbereiches eines flachen Objektes |
-
2021
- 2021-06-24 US US17/357,354 patent/US20220415690A1/en active Pending
-
2022
- 2022-06-02 KR KR1020247002815A patent/KR20240041918A/ko unknown
- 2022-06-02 CN CN202280043607.0A patent/CN117795656A/zh active Pending
- 2022-06-02 WO PCT/JP2022/022447 patent/WO2022270265A1/ja active Application Filing
- 2022-06-02 JP JP2023529770A patent/JPWO2022270265A1/ja active Pending
- 2022-06-24 TW TW111123592A patent/TW202312339A/zh unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006128423A (ja) * | 2004-10-29 | 2006-05-18 | Fujitsu Ltd | 半導体製造装置 |
| JP2008064595A (ja) * | 2006-09-07 | 2008-03-21 | Olympus Corp | 基板検査装置 |
| JP2009016438A (ja) * | 2007-07-02 | 2009-01-22 | Nitto Denko Corp | 半導体ウエハへの粘着テープ貼付け方法および保護テープの剥離方法 |
| JP2015195328A (ja) * | 2014-03-28 | 2015-11-05 | 株式会社ダイヘン | ワーク処理装置、ワーク搬送システム |
Also Published As
| Publication number | Publication date |
|---|---|
| TW202312339A (zh) | 2023-03-16 |
| JPWO2022270265A1 (ja) | 2022-12-29 |
| CN117795656A (zh) | 2024-03-29 |
| KR20240041918A (ko) | 2024-04-01 |
| US20220415690A1 (en) | 2022-12-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7723710B2 (en) | System and method including a prealigner | |
| JP2003501828A (ja) | ウエハ方向センサー | |
| JP4681607B2 (ja) | 回転デバイス上の半導体基板の位置検出装置及び方法 | |
| WO2010098179A1 (ja) | 表面検査装置及びその校正方法 | |
| WO2022270265A1 (ja) | アライナ装置 | |
| US20070002316A1 (en) | Wafer aligner, semiconductor manufacturing equipment, and method for detecting particles on a wafer | |
| WO2022163084A1 (ja) | アライナ装置及びアライメント方法 | |
| US20220317058A1 (en) | Defect Inspection Device and Defect Inspection Method | |
| CN111220904A (zh) | 测试互连基板的方法和用于执行该方法的装置 | |
| KR20080008443A (ko) | 반도체 코팅설비의 웨이퍼 플랫존 정렬상태 검출장치 | |
| US8625090B2 (en) | Method and apparatus for inspecting substrates | |
| JPH10318933A (ja) | 基板欠損検出方法及びその装置 | |
| KR102461790B1 (ko) | 웨이퍼 가공 방법 및 시스템 | |
| KR100675558B1 (ko) | 웨이퍼의 직경을 측정할 수 있는 장치 및 방법 | |
| KR102358688B1 (ko) | 웨이퍼 가공 방법 | |
| US11428645B2 (en) | Wafer inspection device and method of manufacturing semiconductor device by using the wafer inspection device | |
| KR102543395B1 (ko) | 웨이퍼 가공 방법 | |
| KR102326680B1 (ko) | 소재 물성 검사 장치 | |
| KR100953341B1 (ko) | 반도체 제조용 웨이퍼 검사장치 | |
| JPS59202646A (ja) | ウエハの位置合わせ装置 | |
| TW202238071A (zh) | 平行度檢測方法及平行度檢測裝置 | |
| KR20080070100A (ko) | 반도체 제조설비의 웨이퍼 검사장치 및 그 방법 | |
| TW201248138A (en) | Wafer inspection device and wafer inspection method using the same | |
| KR20060069991A (ko) | 웨이퍼 정렬 방법 및 웨이퍼 정렬 장치 | |
| KR20040069764A (ko) | 반도체 웨이퍼에 코팅된 감광막 표면의 검사장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22828183 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023529770 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 1020247002815 Country of ref document: KR |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |