WO2022176813A1 - 学習装置、学習方法、学習装置の作動プログラム、教師データ生成装置、機械学習モデル及び医療用撮影装置 - Google Patents
学習装置、学習方法、学習装置の作動プログラム、教師データ生成装置、機械学習モデル及び医療用撮影装置 Download PDFInfo
- Publication number
- WO2022176813A1 WO2022176813A1 PCT/JP2022/005744 JP2022005744W WO2022176813A1 WO 2022176813 A1 WO2022176813 A1 WO 2022176813A1 JP 2022005744 W JP2022005744 W JP 2022005744W WO 2022176813 A1 WO2022176813 A1 WO 2022176813A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- imaging
- learning
- human body
- image
- model
- Prior art date
Links
- 238000010801 machine learning Methods 0.000 title claims abstract description 65
- 238000002059 diagnostic imaging Methods 0.000 title claims abstract description 35
- 238000012549 training Methods 0.000 title claims abstract description 26
- 238000000034 method Methods 0.000 title claims description 36
- 238000003384 imaging method Methods 0.000 claims abstract description 253
- 230000003287 optical effect Effects 0.000 claims abstract description 40
- 230000005855 radiation Effects 0.000 claims description 83
- 230000006870 function Effects 0.000 claims description 30
- 238000009877 rendering Methods 0.000 claims description 25
- 230000037308 hair color Effects 0.000 claims description 8
- 239000013256 coordination polymer Substances 0.000 description 48
- 230000036544 posture Effects 0.000 description 33
- 238000012545 processing Methods 0.000 description 33
- 238000002601 radiography Methods 0.000 description 19
- 238000005516 engineering process Methods 0.000 description 16
- 238000010586 diagram Methods 0.000 description 12
- 210000003127 knee Anatomy 0.000 description 11
- 230000008569 process Effects 0.000 description 11
- 230000008859 change Effects 0.000 description 8
- 238000011156 evaluation Methods 0.000 description 8
- 102100037563 40S ribosomal protein S2 Human genes 0.000 description 7
- 238000004891 communication Methods 0.000 description 6
- 101001098029 Homo sapiens 40S ribosomal protein S2 Proteins 0.000 description 5
- 210000001015 abdomen Anatomy 0.000 description 5
- 238000012790 confirmation Methods 0.000 description 5
- 210000002414 leg Anatomy 0.000 description 5
- 238000011176 pooling Methods 0.000 description 5
- 101150007503 rps1 gene Proteins 0.000 description 5
- 101150008822 rpsA gene Proteins 0.000 description 5
- 239000000523 sample Substances 0.000 description 5
- 238000013527 convolutional neural network Methods 0.000 description 4
- 208000010978 mucopolysaccharidosis type 4 Diseases 0.000 description 4
- 102100033409 40S ribosomal protein S3 Human genes 0.000 description 3
- 101000656561 Homo sapiens 40S ribosomal protein S3 Proteins 0.000 description 3
- 238000005452 bending Methods 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000000877 morphologic effect Effects 0.000 description 3
- 101100402358 Caenorhabditis elegans mps-4 gene Proteins 0.000 description 2
- 101000732165 Homo sapiens 40S ribosomal protein S4, X isoform Proteins 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 244000309466 calf Species 0.000 description 2
- 238000013145 classification model Methods 0.000 description 2
- 239000003814 drug Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 210000003414 extremity Anatomy 0.000 description 2
- 238000010191 image analysis Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 210000000689 upper leg Anatomy 0.000 description 2
- 210000000707 wrist Anatomy 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 206010058467 Lung neoplasm malignant Diseases 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 238000013528 artificial neural network Methods 0.000 description 1
- 230000037396 body weight Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 210000000629 knee joint Anatomy 0.000 description 1
- 238000012417 linear regression Methods 0.000 description 1
- 201000005202 lung cancer Diseases 0.000 description 1
- 208000020816 lung neoplasm Diseases 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000012706 support-vector machine Methods 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000002834 transmittance Methods 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
- 238000012285 ultrasound imaging Methods 0.000 description 1
Images



















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/08—Auxiliary means for directing the radiation beam to a particular spot, e.g. using light beams
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/13—Tomography
- A61B8/14—Echo-tomography
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10116—X-ray image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10132—Ultrasound image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20084—Artificial neural networks [ANN]
Abstract
Description
上記例では、疑似画像SPのみを教師データTDとして用いる例で説明したが、図19に示すように、疑似画像SPに加えて、カメラ画像CPを混在させて機械学習モデルLM0を学習させてもよい。ここで、疑似画像SPと正解データADとで構成される教師データTDを第1教師データとした場合において、カメラ画像CPと正解データADとで構成される教師データを第2教師データTD2とする。学習部52は、第1教師データTDと第2教師データTD2の両方を用いて機械学習モデルLM0を学習させる。学習済みモデルLMの運用時に用いられるカメラ画像CPを用いて学習させることにより、疑似画像SPのみを用いる場合と比較して、撮影部位及び撮影方向を導出する精度が向上する。
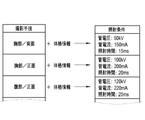
上記例では、図4に示したように、学習済みモデルLMの運用フェーズにおいて、撮影手技判定部14Bは、撮影オーダ31に含まれる撮影手技(「胸部/背面」など)と、学習済みモデルLMが導出した撮影手技(「胸部/背面」など)とをそのままディスプレイ14Cに出力する。しかし、図20に示すように、撮影手技判定部14Bに照合部14Dを設け、撮影オーダ31に含まれる撮影手技と学習済みモデルLMが導出する撮影手技とを照合部14Dが照合するようにしてもよい。この場合、照合部14Dは、両者の撮影手技が一致するか否かの照合結果を出力し、ポジショニング確認画面36に照合結果を表示してもよい。照合結果は、図20の例では、「判定された撮影手技は撮影オーダと一致しています」などのメッセージの形態で表示される。また、照合結果が、両者の撮影手技が一致しないという照合結果の場合は、ポジショニング確認画面36に、「判定された撮影手技は撮影オーダと一致していません」といったメッセージ(図示せず)が照合結果として表示される。このようなメッセージは、技師RGに対して、ポジショニングミスを気付かせるアラートとして機能する。さらに、アラートとして、音声、警告音、及び警告ランプなどを用いてもよい。
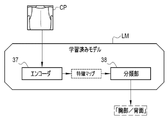
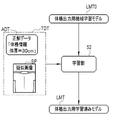
図21及び図22に示す第2実施形態は、カメラ画像CPを入力として、カメラ画像CPに写る被検者Hの体格を表す体格情報を導出する体格出力用学習済みモデルLMTを考える。第2実施形態は、こうした体格出力用学習済みモデルLMTを生成するために、体格出力学習済みモデルLMTのベースとなる体格出力用機械学習モデルLMT0の学習に、疑似画像SPを用いる例である。図21に示すように、体格出力用学習済みモデルLMTは、例えば、エンコーダ37と、回帰部68とを備える。エンコーダ37は、図5で示した撮影手技を導出する学習済みモデルLMと同様である。体格出力用学習済みモデルLMTは、カメラ画像CPの特徴マップから、カメラ画像CPに写る被検者Hの体格情報として、例えば体厚の数値を推定する回帰モデルである。回帰部68としては、例えば、線形回帰モデル、サポートベクターマシンなどが用いられる。
図23に示す第3実施形態は、医療用撮影装置として超音波撮影装置に本開示の技術を適用した例である。超音波撮影装置は、超音波の発信部と受信部とを備えたプローブ71を有している。超音波撮影は、プローブ71を被検者Hの撮影部位に接触させることにより行われる。超音波撮影においても、撮影オーダによって撮影部位が指定されており、また、撮影方向(プローブ71の向き)も撮影目的に応じて定まる場合がある。撮影部位及び撮影方向が不適切な場合は、適切な超音波画像を取得できない場合もある。
してもよい。複数の処理部を1つのプロセッサで構成する例としては、第1に、1つ以上のCPUとソフトウエアの組み合わせで1つのプロセッサを構成し、このプロセッサが複数の処理部として機能する形態がある。第2に、システムオンチップ(System On Chip:SoC)等に代表されるように、複数の処理部を含むシステム全体の機能を1つのICチップで実現するプロセッサを使用する形態がある。このように、各種の処理部は、ハードウェア的な構造として、上記各種のプロセッサを1つ以上用いて構成される。
Claims (13)
- 医療用撮影装置に対してポジショニングされた状態の被検者を光学カメラで撮影したカメラ画像を入力として、前記カメラ画像に写る前記被検者の撮影部位及び撮影方向を導出する機械学習モデルを学習させる学習装置であって、
プロセッサと前記プロセッサに接続又は内蔵されたメモリとを有し、
前記プロセッサは、
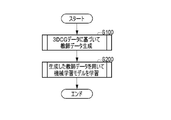
三次元のコンピュータグラフィックスデータによって構成される人体モデルに基づいて生成された人体の疑似画像であって、前記医療用撮影装置に対してポジショニングされた状態の前記被検者を模した疑似画像を、前記撮影部位及び撮影方向の組み合わせ毎に複数生成し、
生成された前記疑似画像と、前記組み合わせの正解データとで構成される複数の教師データを用い、前記機械学習モデルを学習させる学習装置。 - 前記三次元のコンピュータグラフィックスデータには、前記人体モデルの姿勢及び外見のうちの少なくとも一方を変更するためのモデリングパラメータが付帯されている、請求項1に記載の学習装置。
- 前記モデリングパラメータは、前記人体モデルの体格を表す体格情報、性別、姿勢情報、皮膚の色、髪の色、髪型、及び服装のうちの少なくとも1つを含む、請求項2に記載の学習装置。
- 前記プロセッサは、設定された視点から前記人体モデルをレンダリングすることにより前記疑似画像を生成することが可能であり、前記視点はレンダリングパラメータによって変更可能である請求項1から請求項3のうちのいずれか1項に記載の学習装置。
- 前記視点を設定するための視点情報には、前記視点に仮想的に設置される仮想カメラの焦点距離と前記仮想カメラから前記人体モデルまでの距離である撮影距離とが含まれる請求項4に記載の学習装置。
- 前記疑似画像と前記正解データとで構成される教師データを第1教師データとした場合において、
前記プロセッサは、
前記第1教師データに加えて、光学カメラで撮影したカメラ画像と前記正解データとで構成される第2教師データを用いて、前記機械学習モデルを学習させる、請求項1から請求項5のうちのいずれか1項に記載の学習装置。 - さらに、前記疑似画像と前記人体モデルの体格を表す体格情報の正解データとで構成される複数の体格出力用教師データを用いて、前記カメラ画像を入力として前記被検者の体格を表す体格情報を導出する体格出力用機械学習モデルを学習させる請求項1から請求項6のうちのいずれか1項に記載の学習装置。
- 前記医療用撮影装置は、放射線撮影装置及び超音波撮影装置のうちの少なくとも1つを含む、請求項1から請求項7のうちのいずれか1項に記載の学習装置。
- 医療用撮影装置に対してポジショニングされた状態の被検者を光学カメラで撮影したカメラ画像を入力として、前記カメラ画像に写る前記被検者の撮影部位及び撮影方向を導出する機械学習モデルを、コンピュータを用いて学習させる学習方法であって、
三次元のコンピュータグラフィックスデータによって構成される人体モデルに基づいて生成された人体の疑似画像であって、前記医療用撮影装置に対してポジショニングされた状態の前記被検者を模した疑似画像を、前記撮影部位及び撮影方向の組み合わせ毎に複数生成し、
生成された前記疑似画像と、前記組み合わせの正解データとで構成される複数の教師データを用い、前記機械学習モデルを学習させる学習方法。 - 医療用撮影装置に対してポジショニングされた状態の被検者を光学カメラで撮影したカメラ画像を入力として、前記カメラ画像に写る前記被検者の撮影部位及び撮影方向を導出する機械学習モデルを学習させる学習装置として、コンピュータを機能させる学習装置の作動プログラムであって、
三次元のコンピュータグラフィックスデータによって構成される人体モデルに基づいて生成された人体の疑似画像であって、前記医療用撮影装置に対してポジショニングされた状態の前記被検者を模した疑似画像を、前記撮影部位及び撮影方向の組み合わせ毎に複数生成し、
生成された前記疑似画像と、前記組み合わせの正解データとで構成される複数の教師データを用い、前記機械学習モデルを学習させる学習装置として、コンピュータを機能させる学習装置の作動プログラム。 - 医療用撮影装置に対してポジショニングされた状態の被検者を光学カメラで撮影したカメラ画像を入力として、前記カメラ画像に写る前記被検者の撮影部位及び撮影方向を導出する機械学習モデルを学習させるために用いる教師データを生成する教師データ生成装置であって、
プロセッサと前記プロセッサに接続又は内蔵されたメモリとを有し、
前記プロセッサは、
人体の疑似画像を生成するための人体モデルを構成する三次元のコンピュータグラフィックスデータであって、前記人体モデルの姿勢及び外見のうちの少なくとも一方を変更するためのパラメータが付帯されている三次元のコンピュータグラフィックスデータを用い、
前記パラメータを変化させることにより、前記人体モデルの姿勢及び外見のうちの少なくとも一方が異なる複数の前記疑似画像を前記撮影部位及び撮影方向の組み合わせ毎に生成し、
生成した複数の前記疑似画像と前記組み合わせの正解データとで構成される複数の教師データを生成する、教師データ生成装置。 - 医療用撮影装置に対してポジショニングされた状態の被検者を光学カメラで撮影したカメラ画像を入力として、前記カメラ画像に写る前記被検者の撮影部位及び撮影方向を導出する機械学習モデルであって、
三次元のコンピュータグラフィックスデータによって構成される人体モデルに基づいて生成された人体の疑似画像であって、前記医療用撮影装置に対してポジショニングされた状態の前記被検者を模した疑似画像と、前記撮影部位及び撮影方向の組み合わせの正解データとで構成され、前記組み合わせ毎に生成される複数の教師データ用いて学習された機械学習モデル。 - 請求項12に記載の機械学習モデルを備えた医療用撮影装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023500828A JPWO2022176813A1 (ja) | 2021-02-17 | 2022-02-14 | |
| EP22756131.3A EP4295771A1 (en) | 2021-02-17 | 2022-02-14 | Learning device, learning method, learning device operation program, training data generation device, machine learning model and medical imaging device |
| CN202280013806.7A CN116829074A (zh) | 2021-02-17 | 2022-02-14 | 学习装置、学习方法、学习装置的工作程序、教师数据生成装置、机器学习模型及医疗用摄影装置 |
| US18/360,817 US20230368384A1 (en) | 2021-02-17 | 2023-07-28 | Learning device, learning method, operation program of learning device, teacher data generation device, machine learning model, and medical imaging apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021-023759 | 2021-02-17 | ||
| JP2021023759 | 2021-02-17 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US18/360,817 Continuation US20230368384A1 (en) | 2021-02-17 | 2023-07-28 | Learning device, learning method, operation program of learning device, teacher data generation device, machine learning model, and medical imaging apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022176813A1 true WO2022176813A1 (ja) | 2022-08-25 |
Family
ID=82930555
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/005744 WO2022176813A1 (ja) | 2021-02-17 | 2022-02-14 | 学習装置、学習方法、学習装置の作動プログラム、教師データ生成装置、機械学習モデル及び医療用撮影装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230368384A1 (ja) |
| EP (1) | EP4295771A1 (ja) |
| JP (1) | JPWO2022176813A1 (ja) |
| CN (1) | CN116829074A (ja) |
| WO (1) | WO2022176813A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116563246A (zh) * | 2023-05-10 | 2023-08-08 | 之江实验室 | 一种用于医学影像辅助诊断的训练样本生成方法及装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013102851A (ja) * | 2011-11-11 | 2013-05-30 | Konica Minolta Medical & Graphic Inc | 医用画像撮影システム、医用画像処理装置及びプログラム |
| US20200226752A1 (en) * | 2019-01-16 | 2020-07-16 | Samsung Electronics Co., Ltd. | Apparatus and method for processing medical image |
| WO2020209256A1 (ja) * | 2019-04-11 | 2020-10-15 | 富士フイルム株式会社 | 放射線撮影システム及びその作動方法並びに放射線撮影システム用コンソール |
| JP2020192440A (ja) | 2020-09-03 | 2020-12-03 | 富士フイルム株式会社 | 放射線撮影システムとその作動方法 |
| JP2020199163A (ja) * | 2019-06-12 | 2020-12-17 | キヤノン株式会社 | 放射線撮影支援システム、放射線撮影支援方法及びプログラム |
| WO2021020112A1 (ja) * | 2019-07-29 | 2021-02-04 | 富士フイルム株式会社 | 医用撮影システム及び医用撮影処理装置 |
-
2022
- 2022-02-14 EP EP22756131.3A patent/EP4295771A1/en active Pending
- 2022-02-14 WO PCT/JP2022/005744 patent/WO2022176813A1/ja active Application Filing
- 2022-02-14 CN CN202280013806.7A patent/CN116829074A/zh active Pending
- 2022-02-14 JP JP2023500828A patent/JPWO2022176813A1/ja active Pending
-
2023
- 2023-07-28 US US18/360,817 patent/US20230368384A1/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013102851A (ja) * | 2011-11-11 | 2013-05-30 | Konica Minolta Medical & Graphic Inc | 医用画像撮影システム、医用画像処理装置及びプログラム |
| US20200226752A1 (en) * | 2019-01-16 | 2020-07-16 | Samsung Electronics Co., Ltd. | Apparatus and method for processing medical image |
| WO2020209256A1 (ja) * | 2019-04-11 | 2020-10-15 | 富士フイルム株式会社 | 放射線撮影システム及びその作動方法並びに放射線撮影システム用コンソール |
| JP2020199163A (ja) * | 2019-06-12 | 2020-12-17 | キヤノン株式会社 | 放射線撮影支援システム、放射線撮影支援方法及びプログラム |
| WO2021020112A1 (ja) * | 2019-07-29 | 2021-02-04 | 富士フイルム株式会社 | 医用撮影システム及び医用撮影処理装置 |
| JP2020192440A (ja) | 2020-09-03 | 2020-12-03 | 富士フイルム株式会社 | 放射線撮影システムとその作動方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116563246A (zh) * | 2023-05-10 | 2023-08-08 | 之江实验室 | 一种用于医学影像辅助诊断的训练样本生成方法及装置 |
| CN116563246B (zh) * | 2023-05-10 | 2024-01-30 | 之江实验室 | 一种用于医学影像辅助诊断的训练样本生成方法及装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN116829074A (zh) | 2023-09-29 |
| JPWO2022176813A1 (ja) | 2022-08-25 |
| EP4295771A1 (en) | 2023-12-27 |
| US20230368384A1 (en) | 2023-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10507002B2 (en) | X-ray system and method for standing subject | |
| US10170155B2 (en) | Motion information display apparatus and method | |
| CN105816190B (zh) | X射线记录系统 | |
| JP7098485B2 (ja) | 撮像で使用する仮想位置合わせ画像 | |
| US9204825B2 (en) | Method and apparatus for monitoring an object | |
| JP6181373B2 (ja) | 医用情報処理装置及びプログラム | |
| JP7051307B2 (ja) | 医用画像診断装置 | |
| CN111724904A (zh) | 用于针对医学扫描的患者建模的多任务渐进式网络 | |
| CN112022201A (zh) | 机器引导的成像技术 | |
| US20230368384A1 (en) | Learning device, learning method, operation program of learning device, teacher data generation device, machine learning model, and medical imaging apparatus | |
| JP7466541B2 (ja) | 医療用x線撮像機器の位置決め | |
| CN111770735A (zh) | 手术仿真信息生成方法及程序 | |
| JP6598422B2 (ja) | 医用情報処理装置、システム及びプログラム | |
| JP6967983B2 (ja) | 画像処理装置、画像処理方法、及びプログラム | |
| JP6824641B2 (ja) | X線ct装置 | |
| JP7387409B2 (ja) | 医用画像処理装置、医用画像処理方法、医用画像処理プログラム | |
| JP7404857B2 (ja) | 画像判定装置、画像判定方法及びプログラム | |
| WO2014104357A1 (ja) | 動作情報処理システム、動作情報処理装置及び医用画像診断装置 | |
| JP6956514B2 (ja) | X線ct装置及び医用情報管理装置 | |
| JP7427136B2 (ja) | 一次元位置インジケータ | |
| JP7292191B2 (ja) | 医用画像処理装置、医用画像処理方法、および医用画像処理プログラム | |
| EP4197449A1 (en) | Fluoroscopic positioning guidance | |
| CN114502075B (zh) | 用于x射线管检测器校准的用户界面 | |
| JP6918443B2 (ja) | 医用情報処理装置 | |
| CN117323581A (zh) | 表面引导的监测中确定感兴趣区的方法、系统和可读介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 22756131 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023500828 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202280013806.7 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2022756131 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2022756131 Country of ref document: EP Effective date: 20230918 |