WO2022157975A1 - 内視鏡用処置具 - Google Patents
内視鏡用処置具 Download PDFInfo
- Publication number
- WO2022157975A1 WO2022157975A1 PCT/JP2021/002448 JP2021002448W WO2022157975A1 WO 2022157975 A1 WO2022157975 A1 WO 2022157975A1 JP 2021002448 W JP2021002448 W JP 2021002448W WO 2022157975 A1 WO2022157975 A1 WO 2022157975A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- rod
- flange
- treatment tool
- piezoelectric element
- tool according
- Prior art date
Links
- 238000011282 treatment Methods 0.000 title claims abstract description 67
- 238000012277 endoscopic treatment Methods 0.000 claims description 22
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims description 10
- 230000000740 bleeding effect Effects 0.000 description 16
- 238000012986 modification Methods 0.000 description 14
- 230000004048 modification Effects 0.000 description 14
- 230000003902 lesion Effects 0.000 description 11
- 238000003780 insertion Methods 0.000 description 10
- 230000037431 insertion Effects 0.000 description 10
- 238000002347 injection Methods 0.000 description 9
- 239000007924 injection Substances 0.000 description 9
- 239000007788 liquid Substances 0.000 description 9
- 238000000034 method Methods 0.000 description 9
- 238000003384 imaging method Methods 0.000 description 8
- 210000004204 blood vessel Anatomy 0.000 description 7
- 239000002184 metal Substances 0.000 description 7
- 210000001519 tissue Anatomy 0.000 description 7
- 238000005452 bending Methods 0.000 description 6
- 238000012323 Endoscopic submucosal dissection Methods 0.000 description 5
- 238000002679 ablation Methods 0.000 description 5
- 238000002224 dissection Methods 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 239000011248 coating agent Substances 0.000 description 2
- 238000000576 coating method Methods 0.000 description 2
- 239000000470 constituent Substances 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 230000023597 hemostasis Effects 0.000 description 2
- 238000009413 insulation Methods 0.000 description 2
- 210000004400 mucous membrane Anatomy 0.000 description 2
- 230000010355 oscillation Effects 0.000 description 2
- 230000010287 polarization Effects 0.000 description 2
- 210000004876 tela submucosa Anatomy 0.000 description 2
- 238000011298 ablation treatment Methods 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 210000001198 duodenum Anatomy 0.000 description 1
- 210000003238 esophagus Anatomy 0.000 description 1
- 210000001035 gastrointestinal tract Anatomy 0.000 description 1
- 230000002439 hemostatic effect Effects 0.000 description 1
- 210000002429 large intestine Anatomy 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 210000002784 stomach Anatomy 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
Definitions
- the present invention relates to an endoscopic treatment instrument.
- Patent Literature 1 describes a high-frequency knife that cuts and separates tissue using an electrode to which a high-frequency current is applied.
- the object of the present invention is to provide an endoscopic treatment instrument that is less prone to bleeding when performing procedures such as incision and ablation.
- a treatment instrument for an endoscope includes a sheath, a rod inserted into the sheath, a piezoelectric element provided around the rod, and a first flange connected to the rod. and a second flange connected to the rod, wherein the piezoelectric element is sandwiched between the first flange disposed distally and the second flange disposed proximally.
- bleeding hardly occurs during treatment such as incision and dissection.
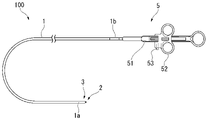
- FIG. 1 is an overall view of an endoscopic treatment system according to a first embodiment;
- FIG. It is an overall view showing a treatment tool of the endoscope treatment system. It is a perspective view of the front-end
- FIG. 10 illustrates a standing wave of vibration in the longitudinal direction; It is a flowchart which shows the usage procedure of the same treatment tool. It is a perspective view which shows the modification of the ultrasonic oscillation part of the same treatment tool. It is sectional drawing which shows the modification of the 1st flange of the same treatment tool.
- FIG. 10 illustrates a standing wave of vibration in the longitudinal direction; It is a flowchart which shows the usage procedure of the same treatment tool. It is a perspective view which shows the modification of the ultrasonic oscillation part of the same treatment tool. It is sectional drawing which shows the modification of the 1
- 11 is a cross-sectional view showing a modification of the route of the first flexible wiring; It is a sectional view showing a modification of the second flange. It is an overall view showing a treatment instrument according to a second embodiment of the present invention. It is a perspective view of the front-end
- FIG. 1 is an overall view of an endoscope treatment system 300 according to this embodiment.
- the endoscope treatment system 300 includes an endoscope 200 and a treatment instrument 100, as shown in FIG.
- the treatment instrument 100 is used by being inserted into the endoscope 200 .
- the endoscope 200 is a known flexible endoscope, and includes an insertion section 202 that is inserted into the body from its distal end, and an operation section 207 attached to the proximal end of the insertion section 202 .
- the insertion section 202 has an imaging section 203 , a bending section 204 and a flexible section 205 .
- the imaging section 203 , the bending section 204 and the flexible section 205 are arranged in this order from the distal end of the insertion section 202 .
- a channel 206 for inserting the treatment instrument 100 is provided inside the insertion portion 202 .
- a distal end opening 206 a of a channel 206 is provided at the distal end of the insertion portion 202 .
- the imaging unit 203 is equipped with an imaging device such as a CCD or CMOS, and is capable of imaging the site to be treated.
- the imaging unit 203 can image the rod 2 of the treatment instrument 100 while the treatment instrument 100 protrudes from the distal end opening 206 a of the channel 206 .
- the bending portion 204 bends according to the operation of the operating portion 207 by the operator.
- the flexible portion 205 is a flexible tubular portion.
- the operation section 207 is connected to the flexible section 205 .
- the operation portion 207 has a grip 208 , an input portion 209 , a base end opening 206 b of the channel 206 and a universal cord 210 .
- a grip 208 is a part that is gripped by an operator.
- the input unit 209 receives an operation input for bending the bending unit 204 .
- the universal code 210 outputs the image captured by the imaging unit 203 to the outside.
- the universal code 210 is connected to a display device such as a liquid crystal display via an image processing device including a processor.
- FIG. 2 is an overall view showing the treatment instrument 100.
- FIG. A treatment instrument (endoscopic treatment instrument) 100 includes a sheath 1 , a rod 2 , an ultrasonic oscillator 3 , an operation wire 4 and an operation section 5 .
- the side to be inserted into the patient's body is called the “distal end side (A1)”
- the operation section 5 side is called the “base end side (A2)”.
- the sheath 1 is an elongated member having flexibility and insulating properties and extending from the distal end 1a to the proximal end 1b. Sheath 1 has an outer diameter that allows it to be inserted into channel 206 of endoscope 200 . As shown in FIG. 1 , when the sheath 1 is inserted into the channel 206 , the tip 1 a of the sheath 1 can protrude from the tip opening 206 a of the channel 206 .
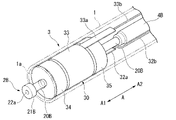
- FIG. 3 is a perspective view of the distal end portion of the treatment instrument 100.
- the rod 2 is a substantially round bar-shaped member made of metal, and is provided so as to protrude from the distal end 1 a of the sheath 1 .
- the rod 2 has conductivity and is energized with a high-frequency current.
- the rod 2 has a rod body 20 and electrode portions 21 .
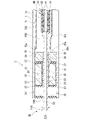
- FIG. 4 is a cross-sectional view of the distal end portion of the treatment instrument 100.
- the rod 2 passes through the ultrasonic oscillator 3 along the longitudinal direction A.
- a central axis O2 in the longitudinal direction A of the rod 2 substantially coincides with a central axis O1 in the longitudinal direction A of the sheath 1 .
- the rod body 20 is a round bar-shaped member made of metal.
- An operating wire 4 is attached to the proximal end of the rod body 20 .
- the rod body 20 supplies the electrode portion 21 with a high-frequency current supplied from the operation wire 4 connected to the operation portion 5 .
- the electrode part 21 is a disc-shaped conductive member provided at the tip of the rod body 20 .
- the outer circumference of the electrode portion 21 is formed concentrically with the outer circumference of the rod body 20 .
- the length L1 of the radial direction R perpendicular to the longitudinal direction A of the electrode portion 21 is longer than the length L2 of the radial direction R of the rod body 20 .
- the electrode part 21 and the projecting part of the rod body 20 function as a monopolar electrode that outputs the high-frequency current to the living tissue.
- the ultrasonic oscillator 3 is a member that is provided around the rod 2 at the distal end 1a of the sheath 1 and that oscillates ultrasonic waves.
- the ultrasonic oscillator 3 is provided inside the sheath 1 and is in contact with the inner peripheral surface 1 c of the sheath 1 .
- the ultrasonic oscillator 3 includes a piezoelectric element 30, a first flange 34, a second flange 35, a first insulating member 36, a second insulating member 37, a third insulating member 38, and a heat-shrinkable tube 39. , have
- FIG. 5 is a perspective view of the piezoelectric element 30.
- the piezoelectric element 30 is a passive element using a piezoelectric effect that converts voltage into force.
- the piezoelectric element 30 has a cylindrical shape with a cavity H inside.
- the piezoelectric element 30 has a piezoelectric body 31 , a first electrode 32 and a second electrode 33 .
- the piezoelectric body 31 has a cylindrical shape and is made of, for example, ceramics or a single crystal material.
- a first electrode 32 is attached to the piezoelectric body 31 along an inner surface 31i, as shown in FIG.
- a second electrode 33 is attached to the piezoelectric body 31 along the outer surface 31o.
- the piezoelectric body 31 vibrates when alternating current is applied from the first electrode 32 and the second electrode 33 .
- the polarization direction of the piezoelectric body 31 is the radial direction R (thickness direction) connecting the inner surface 31i and the outer surface 31o. Since the polarization direction of the piezoelectric body 31 is the radial direction R connecting the inner surface 31i and the outer surface 31o, it vibrates in the radial direction R due to the piezoelectric effect.
- the rod 2 passes through the cavity H of the piezoelectric element 30.
- a first insulating member 36 is provided between the piezoelectric element 30 and the rod 2 so that the high-frequency current supplied from the rod 2 does not flow through the piezoelectric element 30 .
- a second insulating member 37 is provided on the distal end side and the proximal end side of the piezoelectric element 30 .
- the first electrode 32 is connected to the first wire 32b via the first flexible wiring 32a.
- the first flexible wiring 32a is a flexible flat wiring board.
- the first wire 32b is inserted through the inner space 1s of the sheath 1, extends to the operating portion 5, and is connected to an ultrasonic driving device (not shown).
- the surfaces of the first flexible wiring 32a and the first wire 32b are coated with an insulating coating.
- the first electrode 32 and the first flexible wiring 32a may be integrally formed. This configuration reduces the steps of joining the parts, thereby improving the efficiency of assembly.
- the second electrode 33 is connected to the second wire 33b via the second flexible wiring 33a.
- the second flexible wiring 33a is a flexible flat wiring board.
- the second wire 33b is inserted through the inner space 1s of the sheath 1 and extends to the operating portion 5, and is connected to an ultrasonic driving device (not shown).
- the surfaces of the second flexible wiring 33a and the second wire 33b are coated with an insulating coating.
- the second electrode 33 and the second flexible wiring 33a may be integrally formed. This configuration reduces the steps of joining the parts, thereby improving the efficiency of assembly.
- the first flange 34 is a cylindrical member made of metal, and is provided on the tip side of the piezoelectric element 30 .
- the outer diameter (length in the radial direction R) of the first flange 34 is longer than the outer diameter (length in the radial direction R) L2 of the rod 2 .
- a tip side of the first flange 34 is covered with a third insulating member 38 .
- the first flange 34 is insulated from the piezoelectric element 30 by a second insulating member 37 .
- the first flange 34 is integrally formed with the rod 2. Note that the first flange 34 and the rod 2 may be formed separately. In that case, the first flange 34 is attached to the rod 2 by adhesion, screwing, press fitting, shrink fitting, or the like.
- the second flange 35 is a cylindrical member made of metal, and is provided on the tip side of the piezoelectric element 30 .
- the outer diameter (length in the radial direction R) of the second flange 35 is longer than the outer diameter (length in the radial direction R) L2 of the rod 2 .
- the second flange 35 is insulated from the piezoelectric element 30 by a second insulating member 37 .
- the second flange 35 is attached to the outer thread 20s provided on the outer periphery of the rod body 20 by screwing.
- the second flange 35 may be attached to the rod 2 by bonding, press fitting, shrink fitting, or the like.
- the second flange 35 and the rod 2 may be integrally formed.
- a through hole 35h is formed through the second flange 35 in the longitudinal direction A.
- the first flexible wiring 32a is inserted through the through hole 35h and extends toward the proximal end.
- the second flexible wiring 33a passes outside the second flange 35 and extends toward the base end.
- the first flexible wiring 32a and the second flexible wiring 33a are not electrically connected to the second flange 35 because their outer peripheral portions are coated with insulation.
- the piezoelectric body 31 vibrates in the radial direction R due to the piezoelectric effect, it also vibrates in the longitudinal direction A due to the Poisson effect.
- the first flange 34 and the second flange 35 sandwich the piezoelectric element 30 via the second insulating member 37 .
- the first flange 34 and the second flange 35 amplify the ultrasonic vibrations in the longitudinal direction A generated by the piezoelectric element 30 .
- FIG. 6 is a diagram showing a standing wave SW of vibration in the longitudinal direction A.
- the frequency of the applied alternating current and the dimensions of the piezoelectric element 30 are adjusted so that the tip of the piezoelectric element 30 and the base of the piezoelectric element 30 are the antinode SW1 (the portion where the amplitude is the largest) of the standing wave SW. preferably. By performing these adjustments, the vibration in the longitudinal direction A can be further amplified.
- the dimensions and materials of the first flange 34 and the second flange 35, and the Preferably, the dimensions and material of the rod 2 are adjusted. By performing these adjustments, the vibration in the longitudinal direction A can be further amplified. Note that the vibration standing wave SW in the longitudinal direction A is not limited to that shown in FIG.
- the vibration in the longitudinal direction A transmitted from the piezoelectric element 30 can be efficiently transmitted to the rod 2 . Even if the first flange 34 is formed separately from the rod 2, if the material of the first flange 34 is the same as that of the rod 2, for example, the vibration in the longitudinal direction A can be efficiently transmitted to the rod 2. be able to.
- the second flange 35 is desirably a member with a smaller difference in acoustic impedance compared to the first flange 34 .
- the heat-shrinkable tube 39 is a tube attached to the outer peripheral portions of the piezoelectric element 30, the first flange 34 and the second flange 35 by heat-shrinking. Since the heat-shrinkable tube 39 is in contact with the inner peripheral surface 1c of the sheath 1, the piezoelectric element 30, the first flange 34 and the second flange 35 cannot slide back and forth inside the sheath 1. As shown in FIG. 4,
- the operation wire 4 is a metal wire and is inserted through the inner space 1 s of the sheath 1 .
- a distal end of the operating wire 4 is connected to the rod 2 , and a proximal end of the operating wire 4 is connected to the operating portion 5 .
- the operating wire 4 has a coil wire 41 and an inner tube 42 .
- the coil wire 41 is passed through the inner tube 42 .
- the inner tube 42 has flexibility and insulation.
- the operation unit 5 has an operation unit main body 51, a slider 52, and a power supply connector 53, as shown in FIGS.
- the distal end of the operation portion main body 51 is connected to the proximal end 1b of the sheath 1.
- the operation portion main body 51 has an internal space through which the operation wire 4 can be inserted.
- the operating wire 4 passes through the inner space of the sheath 1 and the inner space of the operating portion main body 51 and extends to the slider 52 .
- the slider 52 is attached to the operation portion main body 51 so as to be movable along the longitudinal direction A.
- a base end portion of the operation wire 4 is connected to the slider 52 .
- the operation wire 4 and the rod 2 advance and retreat when the operator advances and retreats the slider 52 relative to the operation portion main body 51 .
- a power supply connector 53 is fixed to the slider 52 .
- the power supply connector 53 can be connected to a high-frequency power supply (not shown), and is electrically and physically connected to the proximal end of the operation wire 4 .
- the power supply connector 53 can supply the high frequency current supplied from the high frequency power supply to the electrode section 21 via the operation wire 4 and the rod 2 .
- the operator identifies the lesion by a known method and bulges the lesion. Specifically, the operator inserts the insertion section 202 of the endoscope 200 into the digestive tract (e.g., esophagus, stomach, duodenum, large intestine), and observes the image obtained by the imaging section 203 of the endoscope. Identify the lesion. Next, the operator inserts a known submucosal injection needle into the channel 206 of the insertion portion 202, injects a liquid for local injection (local injection liquid) through the submucosal injection needle, and bulges the lesion. After injecting the local injection solution, the submucosal local injection needle is removed from the channel 206 .
- the insertion section 202 of the endoscope 200 into the digestive tract (e.g., esophagus, stomach, duodenum, large intestine), and observes the image obtained by the imaging section 203 of the endoscope. Identify the lesion.
- the operator insert
- the operator inserts the treatment instrument 100 into the channel 206 and protrudes the distal end 1a of the sheath 1 from the distal opening 206a of the insertion section 202 .
- the operator advances the slider 52 of the operating section 5 relative to the operating section main body 51 to project the rod 2 .
- FIG. 7 is a flow chart showing a procedure for using the treatment instrument 100. As shown in FIG. In step S ⁇ b>11 , the operator operates the ultrasonic driving device to generate ultrasonic vibrations from the piezoelectric element 30 .
- step S12 the operator operates the high-frequency power supply to output high-frequency current from the rod 2 to the living tissue. Since step S ⁇ b>11 is performed before step S ⁇ b>12 , ultrasonic vibration is generated from the piezoelectric element 30 before the high-frequency current is output from the rod 2 . If ultrasonic vibrations are generated from the piezoelectric element 30 before the high-frequency current is output from the rod 2, the operator may perform steps S11 and S12 at the same time, or the order may be changed. good.
- step S13 the operator performs incision/dissection treatment and hemostasis treatment.
- the operator advances the rod 2 and moves the electrode part 21 in a state where the high-frequency current is applied to incise the mucous membrane of the lesion.
- the operator advances the rod 2 to exfoliate the submucosa of the incised lesion while lifting the mucous membrane of the incised lesion and exposing the submucosa while high-frequency current is applied.
- the operator will stop the bleeding.
- the operator applies a high-frequency current to the rod 2 to heat the rod 2 .
- the operator cauterizes the bleeding site with the heated rod 2 to stop the bleeding.
- step S14 the operator operates the high-frequency power supply to stop outputting the high-frequency current from the rod 2.
- step S ⁇ b>15 the operator operates the ultrasonic driving device to stop the output of ultrasonic vibration from the piezoelectric element 30 . Since step S14 is performed before step S15, the output of ultrasonic vibration from the piezoelectric element 30 stops after the output of the high-frequency current from the rod 2 stops. Note that if the output of ultrasonic vibration from the piezoelectric element 30 stops after the output of the high-frequency current from the rod 2 stops, the operator may perform steps S14 and S15 at the same time, or perform them in a different order. You may
- ultrasonic vibrations are always output from the piezoelectric element 30 when high-frequency current is output from the rod 2 .
- the operator performs treatment using high-frequency current or heat energy output from the rod 2, it is possible to suitably prevent blood vessels from being damaged by the treatment and causing bleeding.
- the endoscope treatment system 300 may further include a control device that controls output and stop of high-frequency current and ultrasonic vibration as in the above flow.
- the controller may control the output and stop of the high-frequency current and the ultrasonic vibration based on one switch operation by the operator.
- the treatment instrument 100 it is possible to prevent living tissue from sticking to the rod 2 by ultrasonically vibrating the rod 2 when performing treatment such as incision and ablation with the rod 2 . Therefore, it is possible to suitably prevent the rod 2 from injuring the blood vessel and causing bleeding during treatment such as incision and dissection.
- the piezoelectric element 30 includes the piezoelectric body 31, the first electrode 32, and the second electrode 33, which are arranged so as to overlap in the radial direction R. Therefore, the piezoelectric element 30 can be made thinner and smaller than when they are stacked in the longitudinal direction A. As shown in FIG.
- the ultrasonic vibration in the longitudinal direction A can be become smaller.
- the first flange 34 and the second flange 35 can amplify the ultrasonic vibrations in the longitudinal direction A generated by the piezoelectric element 30 to a level sufficient for treatment.
- the ultrasonic oscillator 3 has a cylindrical shape.
- the shape of the ultrasonic oscillator 3 is not limited to this.
- the shape of the ultrasonic oscillator 3 is not limited as long as the sheath 1 can be inserted into the channel 206 of the endoscope 200 .
- FIG. 8 is a perspective view showing an ultrasonic oscillator 3A that is a modification of the ultrasonic oscillator 3.
- the ultrasonic oscillator 3A differs from the ultrasonic oscillator 3 only in shape.
- the ultrasonic oscillator 3A is formed in a tubular shape with a rectangular outer circumference when viewed from the front in the longitudinal direction A. As shown in FIG.
- the first flange 34 is a cylindrical member.
- the shape of the first flange 34 is not limited to this.
- FIG. 9 is a cross-sectional view showing a first flange 34A that is a modification of the first flange 34.
- the first flange 34A has a tapered surface 34t on the distal end side, the outer diameter of which decreases from the proximal end side to the distal end side.
- FIG. 10 is a cross-sectional view showing a modification of the route of the first flexible wiring 32a.
- the first flexible wiring 32a shown in FIG. 10 does not pass through the second flange 35, but bends along the second flange 35 and passes outside the second flange 35 to extend toward the proximal side.
- FIG. 11 is a cross-sectional view showing a second flange 35B that is a modification of the second flange 35.
- the second flange 35B has a distal flange 35Ba and a proximal flange 35Bb.
- the distal flange 35Ba and the proximal flange 35Bb are metal cylindrical members.
- the distal flange 35Ba is arranged on the distal side of the proximal flange 35Bb.
- the base end side flange 35Bb is attached by being screwed to an external thread 20s provided on the outer peripheral portion of the rod body 20 .
- the first flexible wiring 32a passes through the inside of the tip side flange 35Ba. Furthermore, the first flexible wiring 32a extends to the proximal side through the outside of the proximal side flange 35Bb while bending along the proximal side flange 35Bb.
- FIG. 12 to 14 A treatment instrument 100B according to a second embodiment of the present invention will be described with reference to FIGS. 12 to 14.
- FIG. 12 to 14 the same reference numerals are given to the same configurations as those already described, and redundant descriptions will be omitted.
- FIG. 12 is an overall view showing the treatment instrument 100B.
- the treatment instrument 100B is used as an endoscope treatment system together with the endoscope 200, like the treatment instrument 100 of the first embodiment. It includes a sheath 1, a rod 2B, an ultrasonic oscillator 3, an operating wire 4B, and an operating section 5B.
- the side to be inserted into the patient's body is called the “distal end side (A1)”
- the operation section 5B side is called the "base end side (A2)”.
- FIG. 13 is a perspective view of the distal end portion of the treatment instrument 100B.
- the rod 2 ⁇ /b>B is a substantially round bar-shaped member made of metal, and is provided so as to protrude from the tip 1 a of the sheath 1 .
- the rod 2B has a rod body 20B and an electrode portion 21B.
- FIG. 14 is a cross-sectional view of the distal end portion of the treatment instrument 100B.
- the rod body 20B and the electrode section 21B are the same as the rod body 20 and the electrode section 21 of the first embodiment, except that they have a first water supply conduit 22 extending along the longitudinal direction A.
- the first water supply pipe 22 communicates with a tip opening 22a formed in the electrode portion 21B.
- the operation wire 4B is the same as the operation wire 4 of the first embodiment, except that a second water supply conduit 43 is formed inside the coil wire 41.
- the second water pipe 43 is connected to the proximal end of the first water pipe 22 .
- the operation portion 5B is the same as the operation portion 5 of the first embodiment except that the liquid supply port 54 is formed in the operation portion main body 51.
- the liquid supply port 54 is connected to the proximal end of the second water supply pipe 43 .
- the liquid supplied from the liquid supply port 54 passes through the second water supply pipeline 43 and the first water supply pipeline 22 and is discharged from the tip opening 22a.
- the treatment instrument 100B it is possible to prevent living tissue from sticking to the rod 2B by vibrating the rod 2B when performing treatment such as incision and ablation with the rod 2B. Therefore, it is possible to suitably prevent the rod 2B from damaging the blood vessel and causing bleeding when performing a treatment such as incision or peeling.
- the liquid for local injection can be supplied from the liquid supply port 54 to swell the lesion.
- the incision/ablation treatment and the local injection treatment can be performed repeatedly.
- the present invention can be applied to endoscopic treatment tools used for hemostasis.
- endoscope treatment system 200 endoscope 100, 100B treatment tool (treatment tool for endoscope) 1, 1B, 1D Sheath 2, 2B Rods 20, 20B Rod bodies 21, 21B Electrode section 22 First water pipe 22a Tip openings 3, 3A Ultrasonic oscillation section 30 Piezoelectric element 31 Piezoelectric body 31i Inner surface 31o Outer surface 32 First electrode 32a first flexible wiring 32b first wire 33 second electrode 33a second flexible wiring 33b second wires 34, 34A first flanges 35, 35B second flanges 4, 4B operating wires 5, 5B operating portion
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biomedical Technology (AREA)
- Otolaryngology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Plasma & Fusion (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
Abstract
Description
本発明の第一の態様に係る内視鏡用処置具は、シースと前記シースに挿入されたロッドと、前記ロッドの周囲に設けられた圧電素子と、前記ロッドに接続された第一フランジと、前記ロッドに接続された第二フランジと、を備え、前記圧電素子は、先端側に配置された前記第一フランジと、基端側に配置された前記第二フランジと、に挟まれている。
本発明の第一実施形態に係る内視鏡処置システム300について、図1から図7を参照して説明する。図1は本実施形態に係る内視鏡処置システム300の全体図である。
内視鏡処置システム300は、図1に示すように、内視鏡200と処置具100とを備えている。処置具100は、内視鏡200に挿入して使用される。
内視鏡200は、公知の軟性内視鏡であり、先端から体内に挿入される挿入部202と、挿入部202の基端に取り付けられた操作部207と、を備える。
図2は、処置具100を示す全体図である。
処置具(内視鏡用処置具)100は、シース1と、ロッド2と、超音波発振部3と、操作ワイヤ4と、操作部5と、を備える。以降の説明において、処置具100の長手方向Aにおいて、患者の体内に挿入される側を「先端側(A1)」、操作部5側を「基端側(A2)」という。
ロッド2は、金属製の略丸棒状の部材であり、シース1の先端1aから突出して設けられている。ロッド2は、導電性を有し、高周波電流が通電される。ロッド2は、ロッド本体20と、電極部21と、を有する。
ロッド2は、長手方向Aに沿って超音波発振部3を貫通している。ロッド2の長手方向Aにおける中心軸O2は、シース1の長手方向Aにおける中心軸O1と略一致している。
圧電素子30は、電圧を力に変換する圧電効果を利用した受動素子である。圧電素子30は、空洞Hを内部に有する円筒形状である。圧電素子30は、圧電体31と、第一電極32と、第二電極33と、を有する。
圧電素子30の先端および圧電素子30の基端が定在波SWの腹SW1(振幅が最も大きくなる部分)となるように、印加される交流電流の周波数や圧電素子30の寸法が調整されていることが好ましい。これらの調整を行うことで、長手方向Aにおける振動をより増幅させることができる。
次に、本実施形態の内視鏡処置システム300を用いた手技(内視鏡処置システム300の使用方法)について説明する。具体的には、ESD(内視鏡的粘膜下層剥離術)などの内視鏡治療における病変部の切開・剥離処置および止血処置について説明する。
術者は、ステップS11において、超音波駆動装置を操作して圧電素子30から超音波振動を発生させる。
上記実施形態において、超音波発振部3は円筒形状である。しかしながら、超音波発振部3の形状はこれに限定されない。シース1が内視鏡200のチャンネル206に挿入可能であれば、超音波発振部3の形状は限定されない。図8は、超音波発振部3の変形例である超音波発振部3Aを示す斜視図である。超音波発振部3Aは、超音波発振部3と比較して、形状のみが異なる。超音波発振部3Aは、長手方向Aから見た正面視において、外周が矩形である筒状に形成されている。
上記実施形態において、第一フランジ34は円筒形状の部材である。しかしながら、第一フランジ34の形状はこれに限定されない。図9は、第一フランジ34の変形例である第一フランジ34Aを示す断面図である。第一フランジ34Aは、先端側に外径が基端側から先端側に向かって小さくなるテーパ面34tを有する。第一フランジ34Aのテーパ面34tの形状を調整することにより、長手方向Aにおける超音波振動の変成比を最適化できる。
上記実施形態において、第一フレキシブル配線32aは、第二フランジ35に形成された貫通孔35hを挿通して基端側に延びている。しかしながら、第一フレキシブル配線32aの経路はこれに限定されない。図10は、第一フレキシブル配線32aの経路の変形例を示す断面図である。図10に示す第一フレキシブル配線32aは、第二フランジ35を貫通せず、第二フランジ35に沿って屈曲しながら第二フランジ35の外側を通過して基端側に延びている。
上記実施形態において、第二フランジ35には第一フレキシブル配線32aが挿通する貫通孔35hが形成されている。しかしながら、第一フレキシブル配線32aが第二フランジ35を通過する態様はこれに限定されない。図11は、第二フランジ35の変形例である第二フランジ35Bを示す断面図である。第二フランジ35Bは、先端側フランジ35Baと基端側フランジ35Bbとを有する。先端側フランジ35Baおよび基端側フランジ35Bbは、金属製の円筒形状の部材である。先端側フランジ35Baは、基端側フランジ35Bbの先端側に配置されている。基端側フランジ35Bbは、ロッド本体20の外周部に設けられた外ネジ20sに螺合して取り付けられている。第一フレキシブル配線32aは、先端側フランジ35Baの内側を通過する。さらに、第一フレキシブル配線32aは、基端側フランジ35Bbに沿って屈曲しながら基端側フランジ35Bbの外側を通過して基端側に延びている。
本発明の第二実施形態に係る処置具100Bについて、図12から図14を参照して説明する。以降の説明において、既に説明したものと共通する構成については、同一の符号を付して重複する説明を省略する。
図12は、処置具100Bを示す全体図である。
処置具100Bは、第一実施形態の処置具100と同様に、内視鏡200とともに内視鏡処置システムとして使用される。シース1と、ロッド2Bと、超音波発振部3と、操作ワイヤ4Bと、操作部5Bと、を備える。以降の説明において、処置具100Bの長手方向Aにおいて、患者の体内に挿入される側を「先端側(A1)」、操作部5B側を「基端側(A2)」という。
ロッド2Bは、金属製の略丸棒状の部材であり、シース1の先端1aから突出して設けられている。ロッド2Bは、ロッド本体20Bと、電極部21Bと、を有する。
ロッド本体20Bおよび電極部21Bは、長手方向Aに沿って延びる第一送水管路22を有することを除いて、第一実施形態のロッド本体20および電極部21と同様である。第一送水管路22は、電極部21Bに形成された先端開口22aに連通している。
200 内視鏡
100,100B 処置具(内視鏡用処置具)
1,1B,1D シース
2,2B ロッド
20,20B ロッド本体
21,21B 電極部
22 第一送水管路
22a 先端開口
3,3A 超音波発振部
30 圧電素子
31 圧電体
31i 内面
31o 外面
32 第一電極
32a 第一フレキシブル配線
32b 第一ワイヤ
33 第二電極
33a 第二フレキシブル配線
33b 第二ワイヤ
34,34A 第一フランジ
35,35B 第二フランジ
4,4B 操作ワイヤ
5,5B 操作部
Claims (14)
- シースと
前記シースに挿入されたロッドと、
前記ロッドの周囲に設けられた圧電素子と、
前記ロッドに接続された第一フランジと、
前記ロッドに接続された第二フランジと、
を備え、
前記圧電素子は、先端側に配置された前記第一フランジと、基端側に配置された前記第二フランジと、に挟まれている、
内視鏡用処置具。 - 前記圧電素子は、筒状に形成されている、
請求項1に記載の内視鏡用処置具。 - 前記圧電素子は、
前記ロッドの周囲に設けられた圧電体と、
前記圧電体の内面に沿って取り付けられた第一電極と、
前記圧電体の外面に沿って取り付けられた第二電極と、
を有する、
請求項2に記載の内視鏡用処置具。 - 前記第一フランジは、筒状に形成されており、
前記第二フランジは、筒状に形成されており、
前記第一フランジの外径は、前記ロッドの外径より大きい、
前記第二フランジの外径は、前記ロッドの外径より大きい、
請求項1に記載の内視鏡用処置具。 - 前記第一フランジは、前記ロッドと一体形成されている、
請求項1に記載の内視鏡用処置具。 - 前記第一フランジは、前記ロッドに取付加工されている、
請求項1に記載の内視鏡用処置具。 - 前記第二フランジは、前記ロッドと一体形成されている、
請求項1に記載の内視鏡用処置具。 - 前記第二フランジは、前記ロッドに取付加工されている、
請求項1に記載の内視鏡用処置具。 - 前記ロッドは、導電性を有し、高周波電流が通電される、
請求項1に記載の内視鏡用処置具。 - 前記圧電素子は、第一絶縁部材により前記ロッドと絶縁されている、
請求項1に記載の内視鏡用処置具。 - 前記第一フランジおよび前記第二フランジは、第二絶縁部材により前記圧電素子と絶縁されている、
請求項1に記載の内視鏡用処置具。 - 前記第一フランジは、第三絶縁部材により先端側が覆われている、
請求項1に記載の内視鏡用処置具。 - 前記ロッドは、長手方向に沿って延びる送水管路を有する、
請求項1に記載の内視鏡用処置具。 - 前記圧電素子を径方向に超音波振動させて、ポアソン比を利用して長手軸方向に超音波振動を前記ロッドに伝える
請求項1に記載の内視鏡用処置具。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022576938A JPWO2022157975A1 (ja) | 2021-01-25 | 2021-01-25 | |
| CN202180090479.0A CN116723806A (zh) | 2021-01-25 | 2021-01-25 | 内窥镜用处置器具 |
| PCT/JP2021/002448 WO2022157975A1 (ja) | 2021-01-25 | 2021-01-25 | 内視鏡用処置具 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/002448 WO2022157975A1 (ja) | 2021-01-25 | 2021-01-25 | 内視鏡用処置具 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022157975A1 true WO2022157975A1 (ja) | 2022-07-28 |
Family
ID=82548654
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/002448 WO2022157975A1 (ja) | 2021-01-25 | 2021-01-25 | 内視鏡用処置具 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JPWO2022157975A1 (ja) |
| CN (1) | CN116723806A (ja) |
| WO (1) | WO2022157975A1 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5069664A (en) * | 1990-01-25 | 1991-12-03 | Inter Therapy, Inc. | Intravascular ultrasonic angioplasty probe |
| US5358505A (en) * | 1991-05-29 | 1994-10-25 | Sonokinetics, Inc. | Tapered tip ultrasonic aspiration method |
| JP2005094552A (ja) * | 2003-09-19 | 2005-04-07 | Olympus Corp | 超音波振動子およびその製造方法 |
| WO2006048966A1 (ja) * | 2004-11-04 | 2006-05-11 | Olympus Medical Systems Corp. | 超音波処置装置、内視鏡装置および処置方法 |
| JP2012179102A (ja) * | 2011-02-28 | 2012-09-20 | Fujifilm Corp | 共振振動子、共振振動子の製造方法およびこの共振振動子を有する超音波処置具 |
| US20160228176A1 (en) * | 2015-02-06 | 2016-08-11 | Steven D. Colquhoun | Electrocautery device |
-
2021
- 2021-01-25 CN CN202180090479.0A patent/CN116723806A/zh active Pending
- 2021-01-25 WO PCT/JP2021/002448 patent/WO2022157975A1/ja active Application Filing
- 2021-01-25 JP JP2022576938A patent/JPWO2022157975A1/ja active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5069664A (en) * | 1990-01-25 | 1991-12-03 | Inter Therapy, Inc. | Intravascular ultrasonic angioplasty probe |
| US5358505A (en) * | 1991-05-29 | 1994-10-25 | Sonokinetics, Inc. | Tapered tip ultrasonic aspiration method |
| JP2005094552A (ja) * | 2003-09-19 | 2005-04-07 | Olympus Corp | 超音波振動子およびその製造方法 |
| WO2006048966A1 (ja) * | 2004-11-04 | 2006-05-11 | Olympus Medical Systems Corp. | 超音波処置装置、内視鏡装置および処置方法 |
| JP2012179102A (ja) * | 2011-02-28 | 2012-09-20 | Fujifilm Corp | 共振振動子、共振振動子の製造方法およびこの共振振動子を有する超音波処置具 |
| US20160228176A1 (en) * | 2015-02-06 | 2016-08-11 | Steven D. Colquhoun | Electrocautery device |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2022157975A1 (ja) | 2022-07-28 |
| CN116723806A (zh) | 2023-09-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7500646B2 (ja) | 圧電中央管腔トランスデューサを備えた超音波外科用器具 | |
| EP1510178B1 (en) | Ultrasonic treatment device and ultrasonic treatment system | |
| JP7086962B2 (ja) | トランスデューサスリップ接合部を有する超音波外科用器具 | |
| EP3068490B1 (en) | Ultrasonic anastomosis instrument with piezoelectric sealing head | |
| US5989264A (en) | Ultrasonic polyp snare | |
| JP3571414B2 (ja) | 超音波切開凝固装置 | |
| JP4128496B2 (ja) | 超音波処置装置 | |
| US5013312A (en) | Bipolar scalpel for harvesting internal mammary artery | |
| JP6532640B2 (ja) | 流体ルーメンを画定する超音波導波管を備えた手術器具 | |
| JP4152188B2 (ja) | 超音波手術器具 | |
| JP4035100B2 (ja) | 医療用処置具及びこれを備えた医療用処置装置 | |
| AU733020B2 (en) | Methods and devices for improving blood flow to a heart of a patient | |
| JPS62211056A (ja) | 組織切除装置 | |
| JPH0856953A (ja) | 超音波止血および切断器具 | |
| KR20050033471A (ko) | 고주파 나이프 및 내시경 장치 | |
| US9763684B2 (en) | Devices and methods for removing occlusions from a bodily cavity | |
| WO2022157975A1 (ja) | 内視鏡用処置具 | |
| JP2019502512A (ja) | 管状の音響導波管セグメントを備えた超音波外科器具 | |
| JP3236135B2 (ja) | 超音波処置装置 | |
| JP3244648B2 (ja) | 内視鏡用焼灼具 | |
| WO2024202400A1 (ja) | 内視鏡用処置具 | |
| JP7459311B2 (ja) | 処置具 | |
| JP2004216180A (ja) | 超音波切開凝固装置 | |
| JP6004556B1 (ja) | 手術用ナイフ付き超音波プローブ用シース | |
| CN116710015A (zh) | 处置器具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21921083 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202180090479.0 Country of ref document: CN |
|
| ENP | Entry into the national phase |
Ref document number: 2022576938 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21921083 Country of ref document: EP Kind code of ref document: A1 |